1. Introduction
Hot-rolled steel plates are widely used in engineering fields such as ship, bridge, machinery, construction, and automobile manufacturing [
1]. In the production process of a plate, due to the rolling process, various types of defects can easily form on the surface of the hot-rolled steel plates, such as warping, edge cracking, edge defects, crusting, oxidation, holes, and roll marks. These defects have a great impact on the appearance and performance of the product, so it is extremely important to detect the surface defects on the plate [
2].
At present, domestically, surface defect detection is performed mainly by traditional machine learning methods [
3,
4] and deep learning methods based on convolutional neural network (CNN) networks [
5,
6]. This method has a high detection rate for non-periodic defects. For example, Yi Li et al. [
7] proposed an end-to-end defect detection system for steel strips [
7]. In this system, the deep convolutional neural network (CNN) is adopted, the defect image is directly taken as the input, and the defect category is taken as the output. The experiment shows that the detection rate of this method for non-periodic surface defects is above 96%. Di He et al. [
8] proposed a new target detection framework called category priority network (CPN) and multi-group convolutional neural network (MG-CNN). In CPN, the image is first classified by MG-CNN. Then, according to the classification result, the feature map group that may contain the defect is separately inputted into another neural network based on yolo (you only look once: a real-time object detection system) [
9] for defect location. The average detection rate of this method for non-periodic surface defects is above 96%.
However, the morphological features of periodic defects, such as roll marks, are not fixed. The traditional CNN classifies by extracting morphological features, and the defects with unfixed morphological features are easily misclassified, so that the detection rate is not high.
As periodic defects, such as roll marks, have strong time-sequenced characteristics, long short-term memory (LSTM) [
10,
11,
12] was introduced, and a periodic defect detection method based on CNN + LSTM was developed. This method combines the advantages of CNN and LSTM. The feature vectors of defect images are first extracted through the CNN, and the extracted feature vectors are inputted into the LSTM for defect recognition.
In view of the non-accurate use of previous effective information of CNN + LSTM, the attention mechanism [
13] with the Encoder-decoder framework [
14] was introduced to improve the method. This improved method specifies the importance of input information at each previous moment, and gives the quantitative weight according to the importance.
This article has five sections.
Section 1 introduces periodic defects and explains the importance of detecting them.
Section 2 introduces the features of periodic defects and amplifies the samples to provide data support for subsequent algorithm research.
Section 3 introduces the periodic defect detection algorithm based on CNN + LSTM, and then uses the amplified samples to carry-out model training and testing, and analyzes the results.
Section 4 introduces the improved detection algorithm with an attention mechanism for the problems in the experiment of
Section 3, and experiments using the improved algorithm to verify its effectiveness.
Section 5 summarizes the advantages and disadvantages of the algorithm introduced in this paper, and looks forward to the direction of its improvement in the future.
2. Description of Periodic Defects
Roll marks on hot-rolled steel plates are typical periodic defects. The training and testing of deep learning networks requires a sufficient number of samples. However, due to the insufficient number of images that were actually collected, we needed manual data amplification. This section introduces features and sample amplification of the periodic roll marks.
2.1. Analysis of Features of Roll Marks
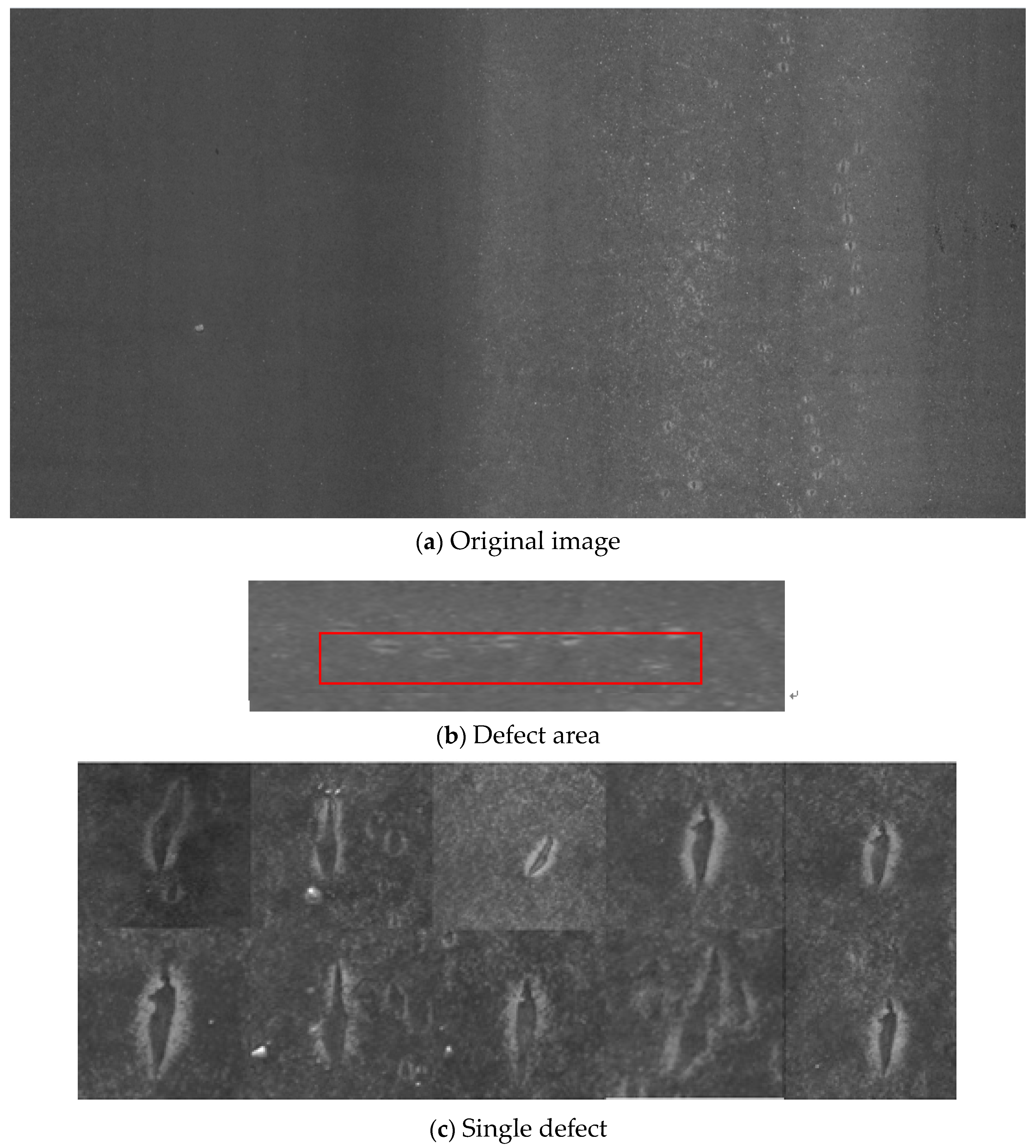
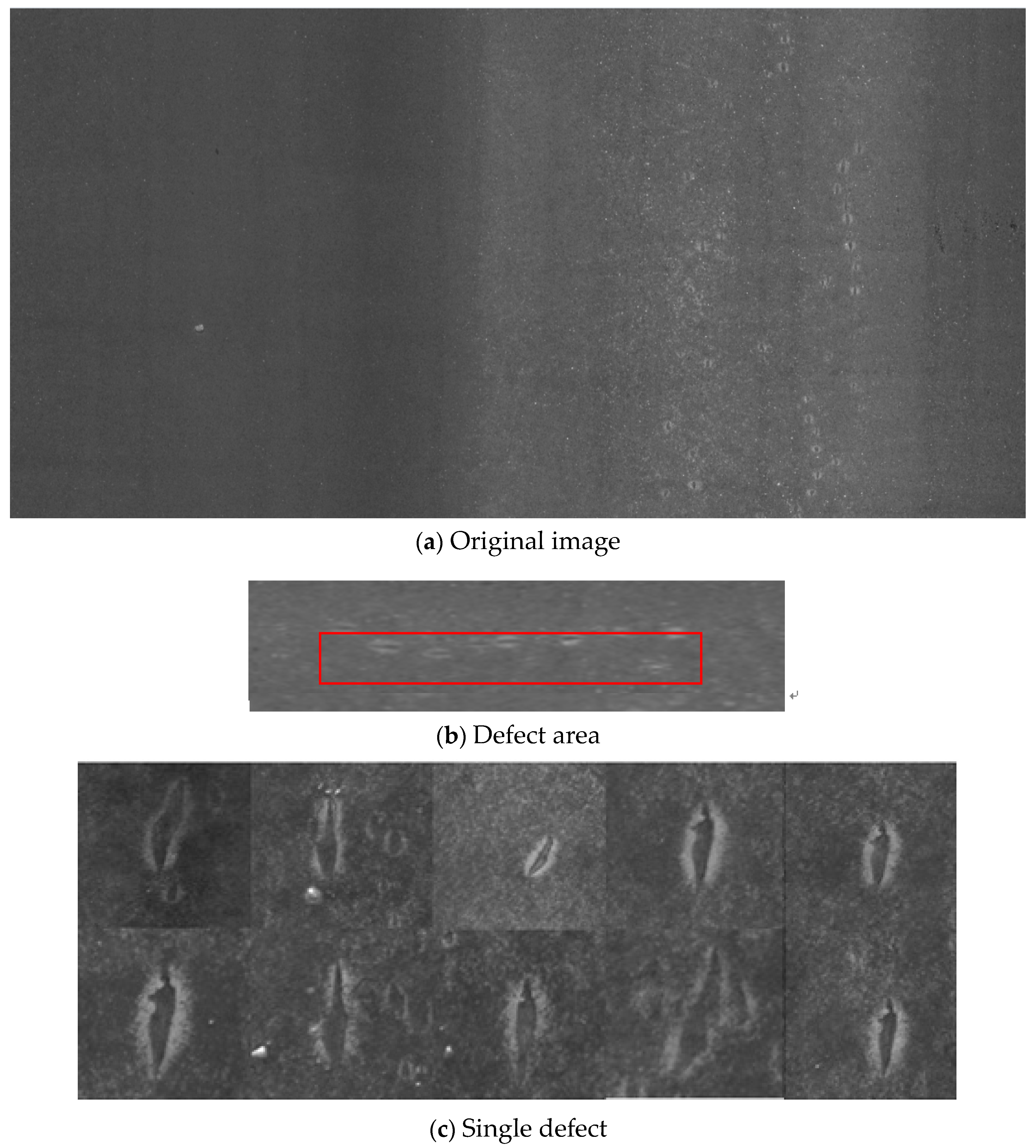
Roll marks are a set of uneven defects with periodicity. They are generally due to roll fatigue, insufficient hardness, or foreign matter on the surface of the rolls during rolling operations. The morphological features of roll marks on the same batch are stable and similar; the morphological features of roll marks on different batches can vary due to the repeated rolling of the steel plates. Roll marks are present on both the upper and lower surfaces of plates, mainly at the operating side and the middle position of the plates. They are bright spots observable by the naked eye, and dark spots in the image captured by a camera.
Figure 1a shows an original image of roll marks.
Figure 1b shows the defect area and that the roll marks in the frame are arranged periodically.
Figure 1c contains details of a single defect, which shows that the morphological features are similar.
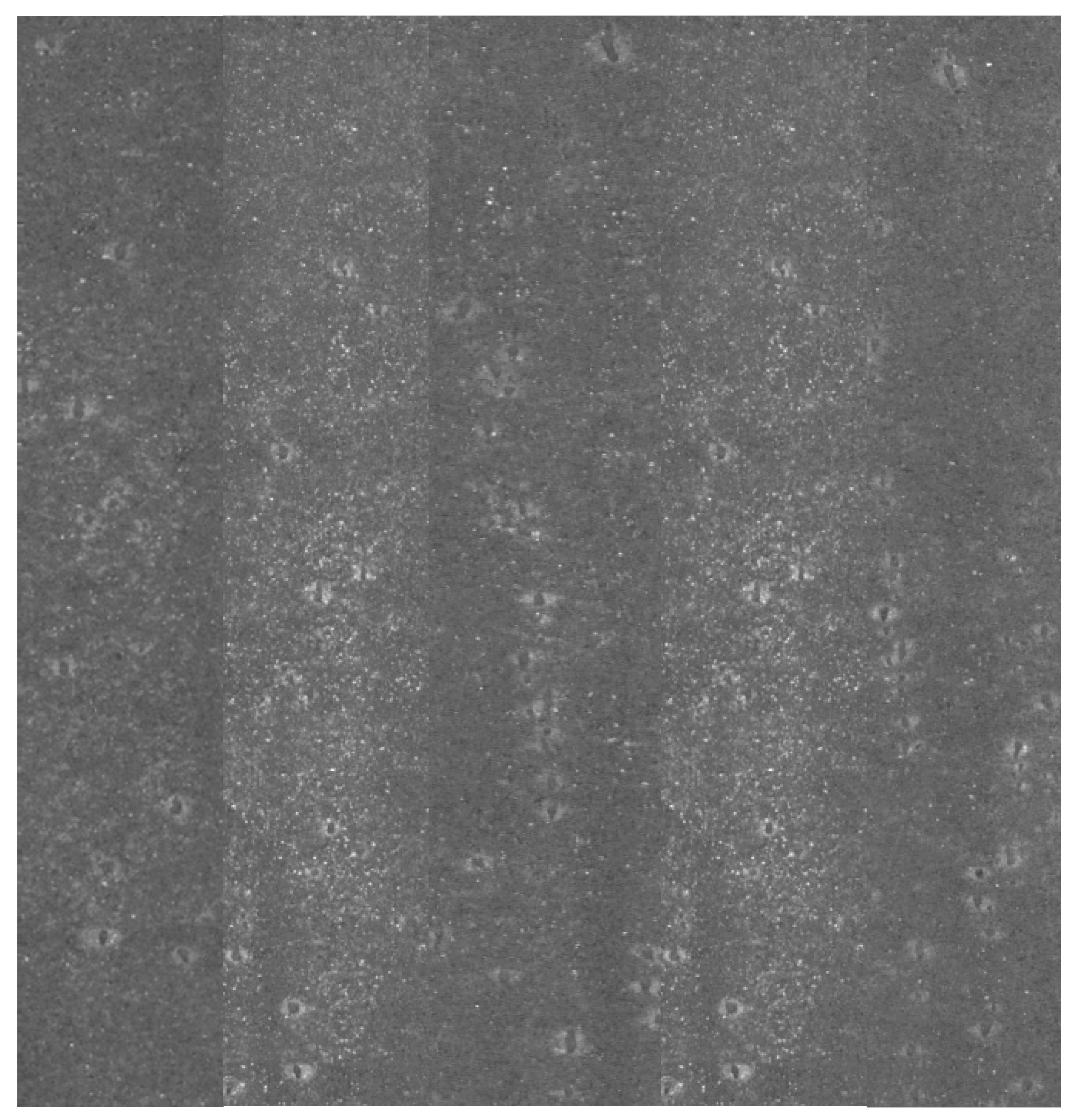
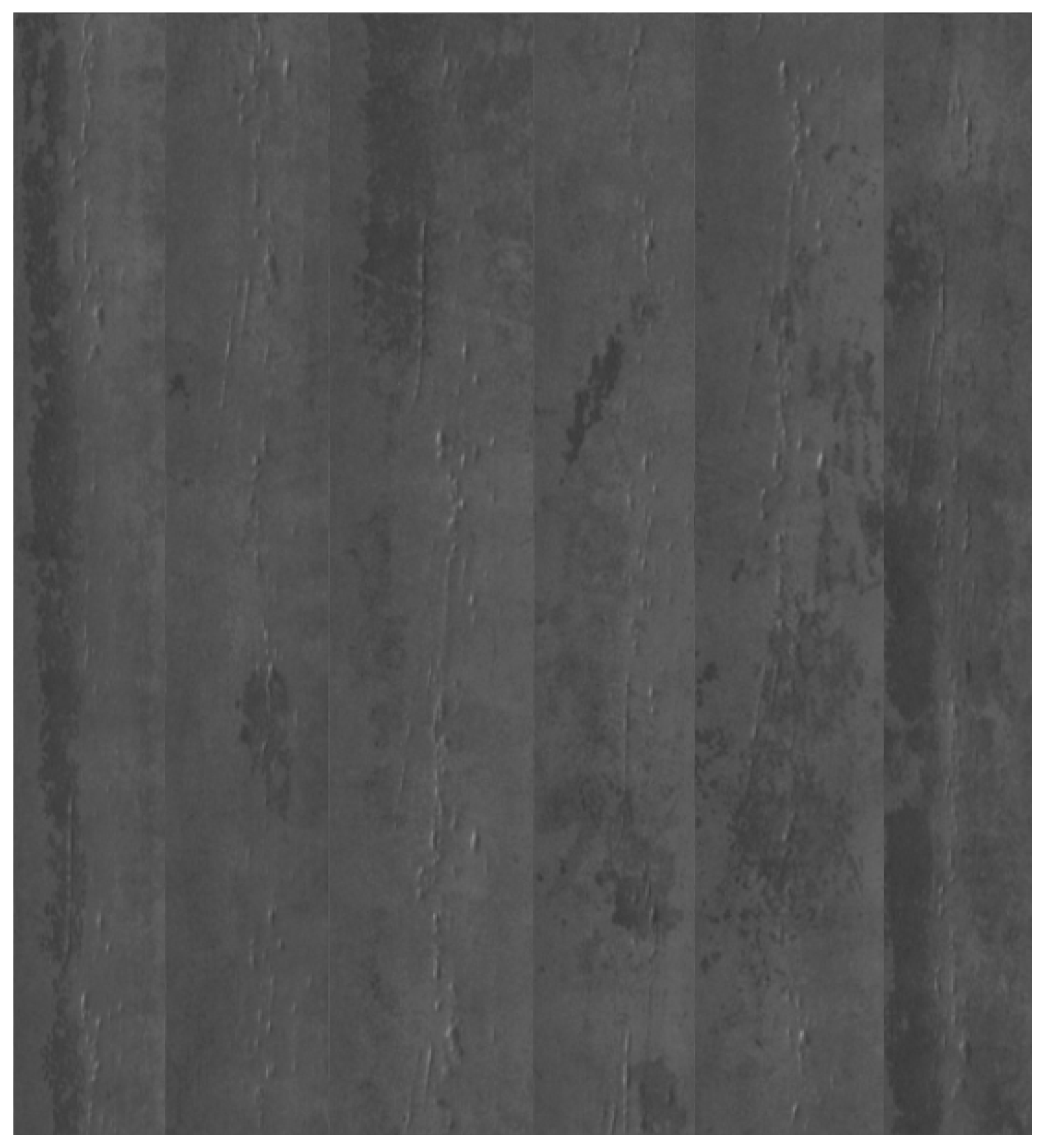
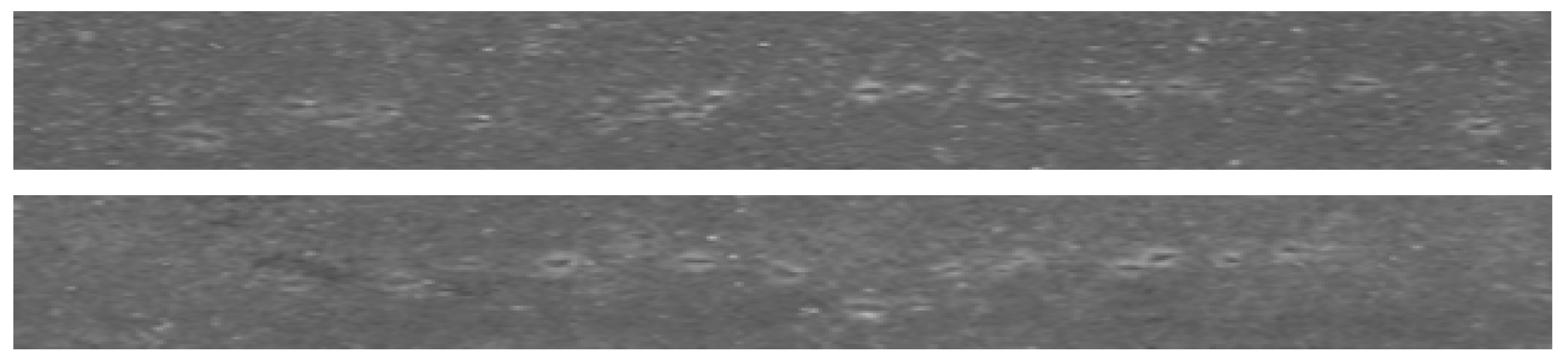
Roll marks are sequentially arranged with periodicity. According to the collected data statistics, the morphological features of roll marks on the same batch are similar, as shown in
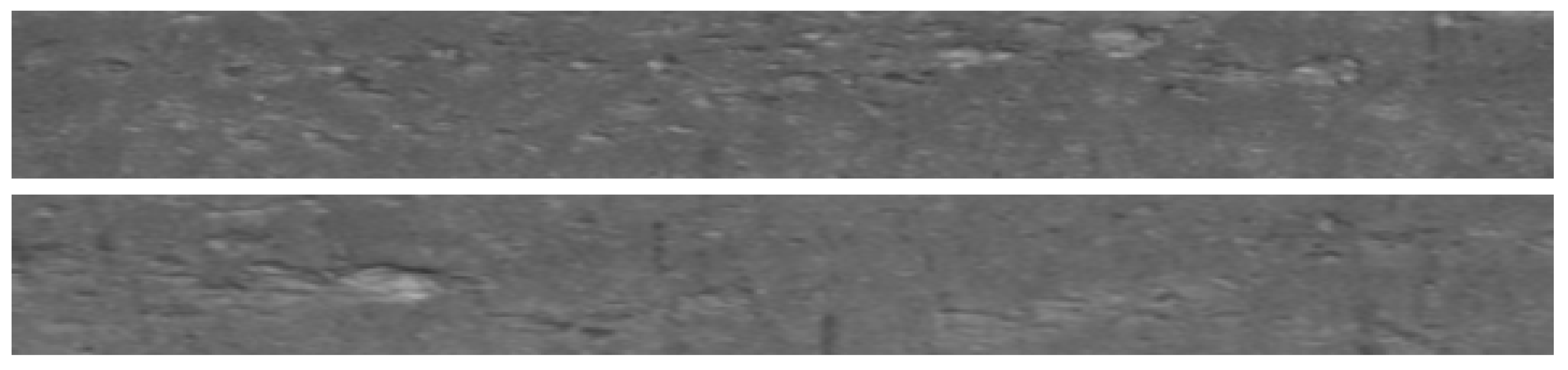
Figure 2. However, the morphological features of roll marks on different batches are very different, as shown in
Figure 3.
Roll mark defects are not well-detected because of the greatly different morphological features of roll marks on different batches. The traditional CNN classifies defects by extracted morphological features [
6]. Therefore, a CNN can easily misclassify roll marks due to their unfixed morphological features. Consequently, the classification accuracy is not high.
However, as roll mark defects have strong periodicity, their time-sequenced characteristics are suitable for handling by LSTM.
2.2. Sample Amplification of Roll Marks
The sample images in the experiment were captured from production lines of hot-rolled steel plates with the surface inspection systems developed by our team. As the number of sample images was limited, for a better model training, a sample generator was designed to augment the number of roll marks to expand the training set.
The generator connected single images of roll marks and backgrounds, and arranged them in a real periodic situation. The generated samples included positive and negative samples.
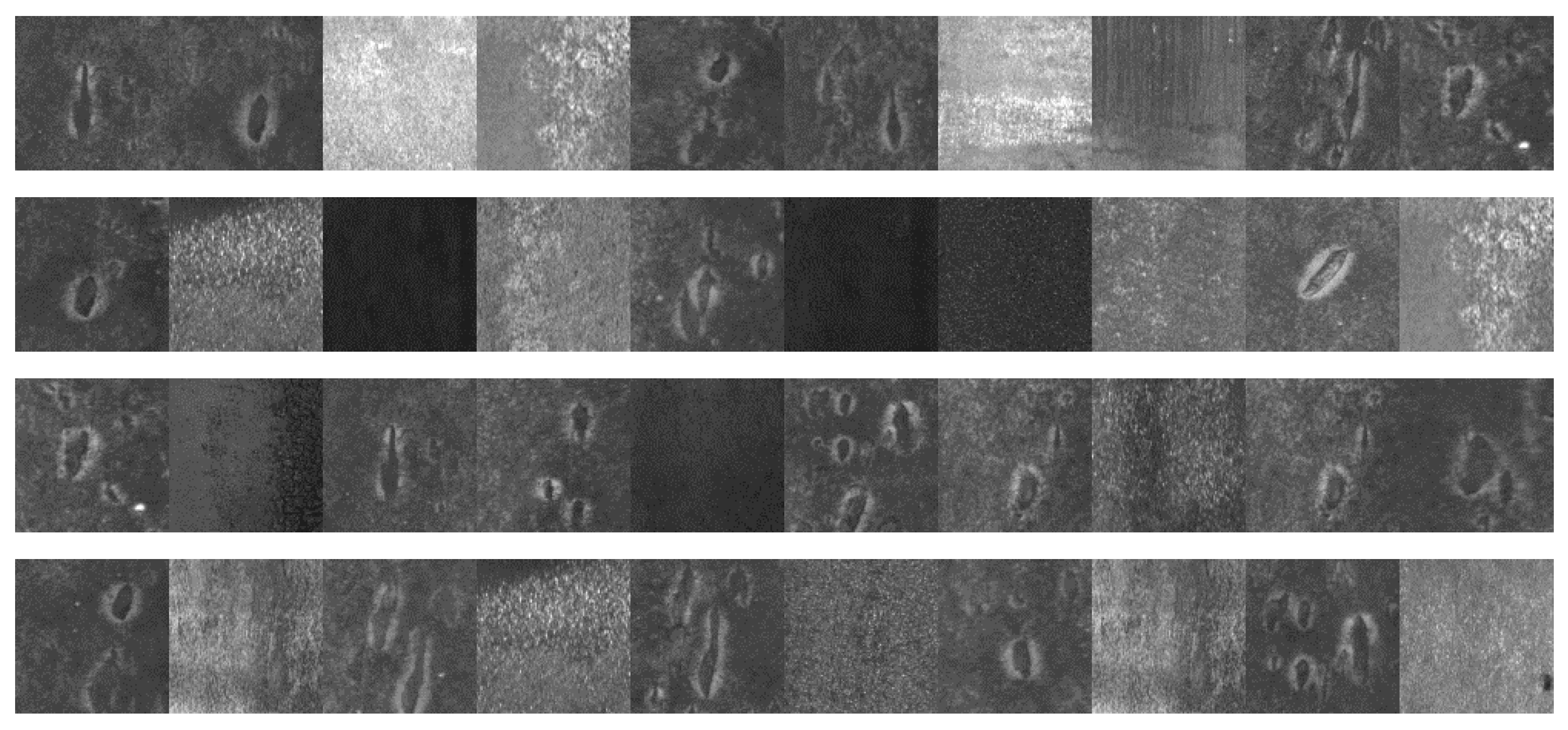
Positive samples mix the images of roll marks and the backgrounds, and 10 single images were connected to form a long rectangular sample. The occurrence pattern of roll marks on connected single images simulated the occurrence pattern of roll marks on the hot-rolled steel plate, which appears according to a certain periodicity. The generated defect samples were used as a training set. The generated positive samples are shown in
Figure 4.
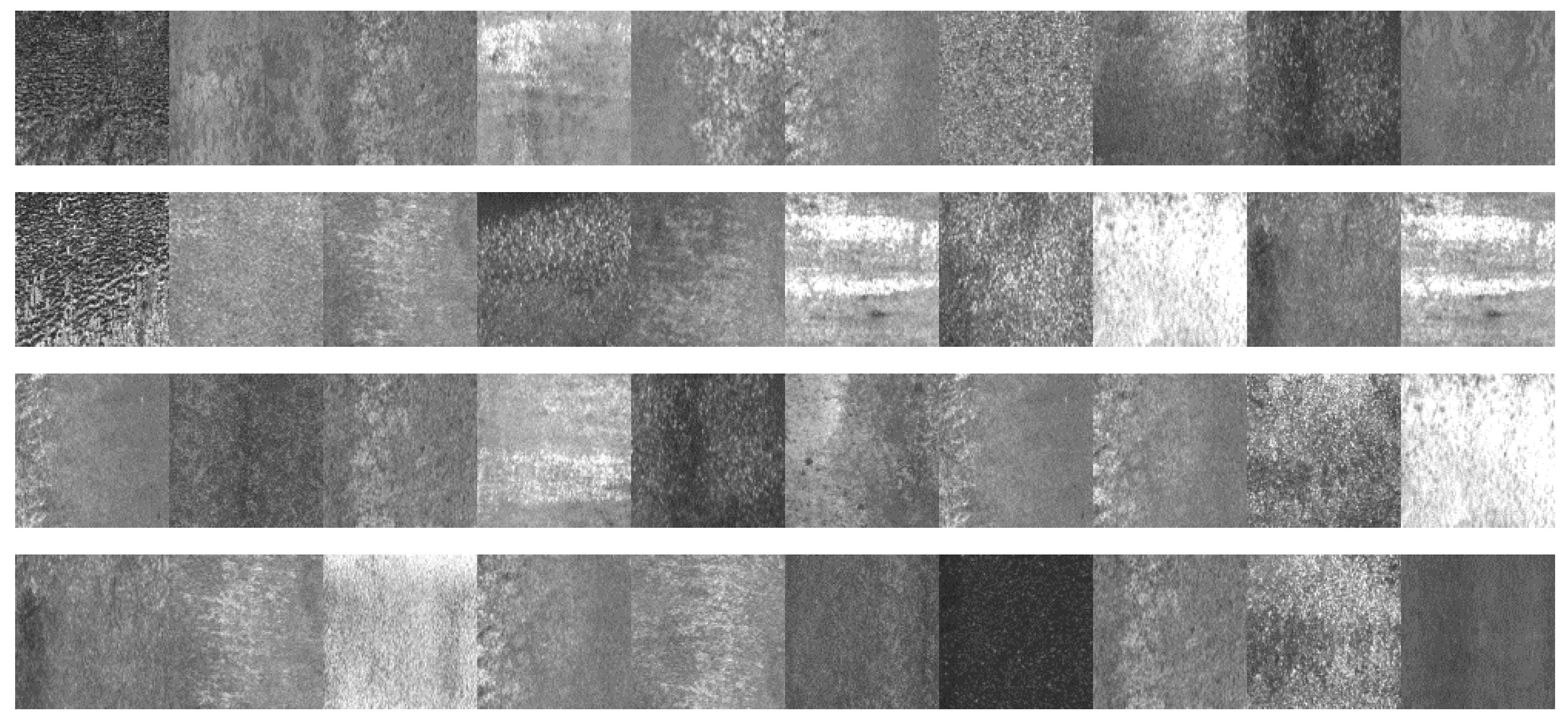
Negative samples only mix the background images, excluding roll marks images. The generated negative samples are shown in
Figure 5.
It can be seen that the generated positive samples are arranged with a certain period. If 1 represents a roll mark and 0 represents background, then the periods of positive samples in
Figure 4 are: 1100110011, 1000100010, 1011011011, and 101010101, respectively. Defects in different samples have different periods, so the generated samples also have different periods, which make the network learn defects with different periods and enhance the algorithm’s robustness.
The generated negative samples are a mixed arrangement of ordinary backgrounds. Because the actual plate images have multiple kinds of interference, we chose background images with various kinds of interference (such as obvious scales) when generating negative samples, which ensured the adaptability of the network to the actual plate images.
3. Periodic Defect Detection Algorithm Based on CNN + LSTM
After generating enough samples, we needed to extract the feature vector with a CNN and use the extracted feature vector as the input of the LSTM to recognize the periodic defects. The following content describes the design and implementation of CNN feature extraction and LSTM defect recognition.
3.1. Feature Extraction of a Periodic Defect Based on CNN
The strength of the CNN is that its network structure can automatically learn the features of the input data, and different levels of the network can learn different levels of features, thereby improving the object recognition rate. The CNN consists of three main parts: a data layer, a feature learning network, and a classification network.
The data layer is the input data of the network, and may be an original image or a preprocessed image. The inputted data are sent to the learning features in the feature learning network, and the learned features are classified by the classification network. The CNN in this paper is used to prepare the input feature vectors for LSTM, so the classification network was removed and the output vector of the last maxpooling layer was selected as the input vector of LSTM.
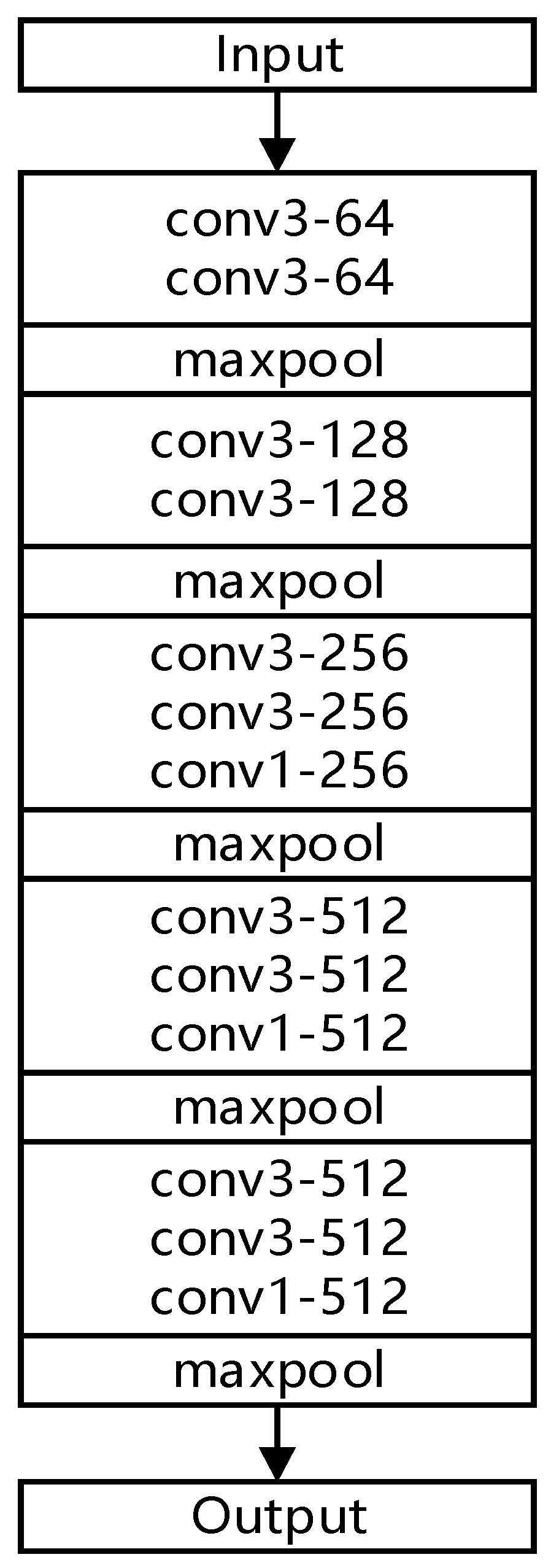
The CNN in this algorithm adopts the VGG16 [
15] network and its network structure diagram is shown in
Figure 6. Since the network is designed to process the inputted images with a fixed size, all inputted images are sized (224, 224). Since the inputted image is a long rectangular image composed of 10 small images, the size of the inputted image is (224, 2240, 1), and the size of the output feature vector is (7, 70, 512).
3.2. Periodic Defect Recognition Based on LSTM
3.2.1. The Principle of Periodic Defect Recognition Based on LSTM
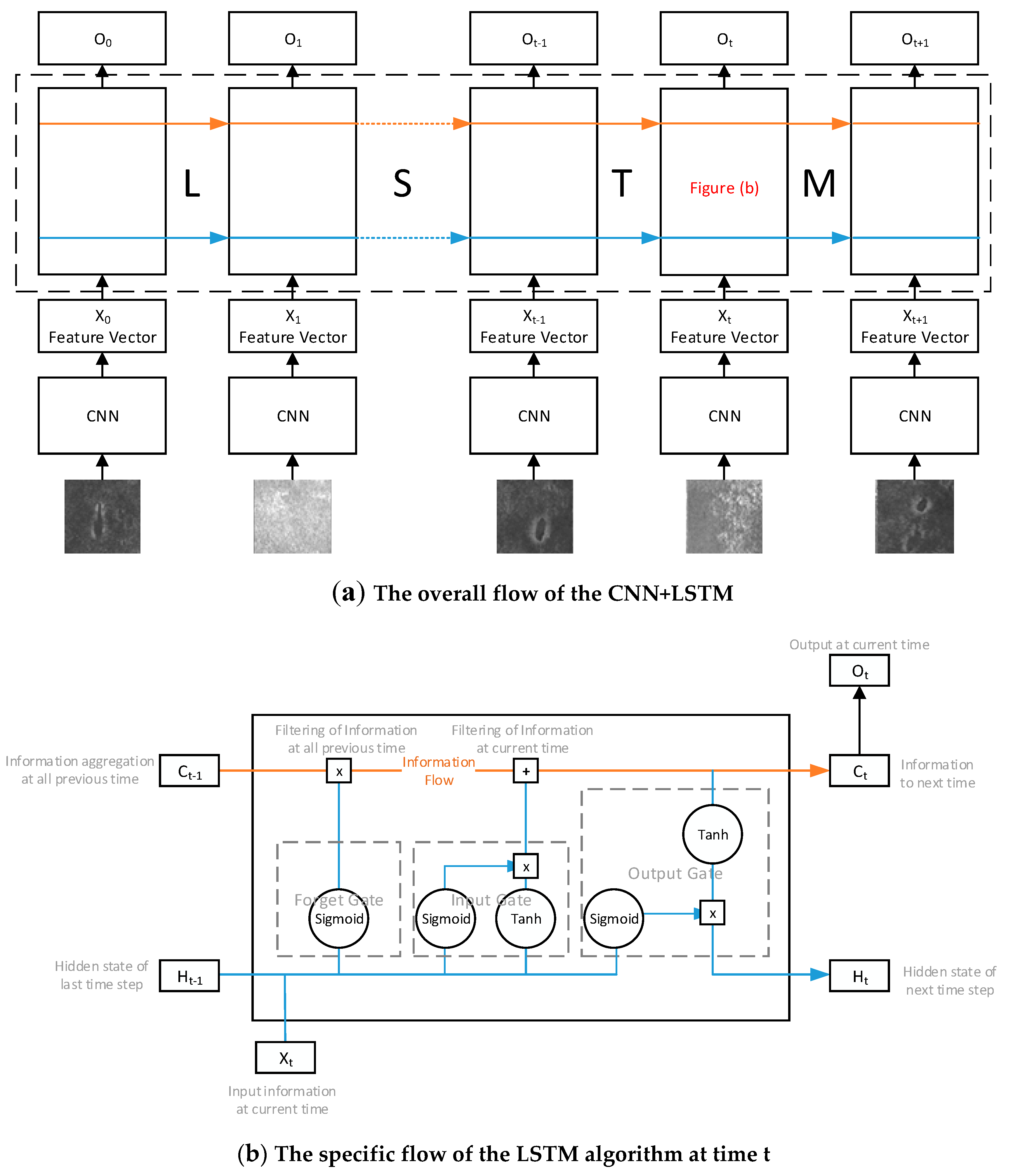
Figure 7a shows the overall flow of CNN + LSTM. The features were extracted from the samples through the CNN to obtain their corresponding feature vectors X. Then, the feature vectors were inputted into the LSTM in a time sequence, and the outputs O are the recognition results.
Figure 7b shows the specific flow of the LSTM [
16] algorithm at time t in
Figure 7a. In
Figure 7b, C
t−1 is the information of the previous time, including all the information inputted into the network at all previous times. Combined with the information X
t inputted at the current time, the information in the previous time is filtered first, and then the inputted information at the current time is filtered. By filtering, information at times without a defect, such as X
2, X
t in
Figure 7a, was forgotten, while information at times with a defect, such as X
0, X
t−1 in
Figure 7a, was remembered. Thereby, LSTM remembers the defect features better and is prevented from forgetting the defect features for too-long periods.
3.2.2. The Specific Process of Recognition of Periodic Defects of LSTM
(1) Constructing an input vector of the LSTM by using the feature vector of the periodic defect extracted by the CNN.
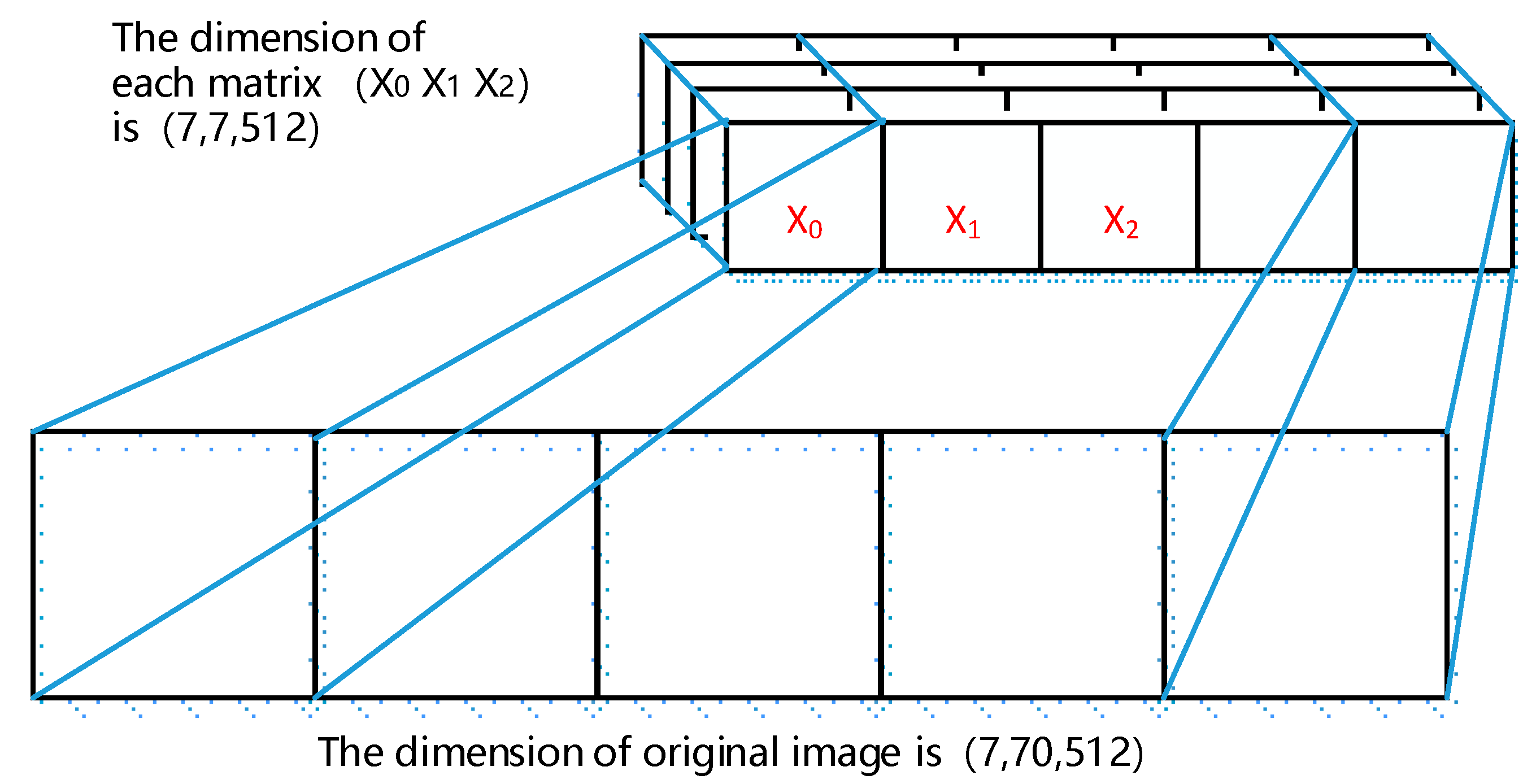
Figure 8 shows a corresponding relation of extracted feature vectors and the original image. A long rectangular image is inputted into the feature extraction network to obtain the feature matrix above. The information contained in one column of the original image corresponds to a multi-dimensional matrix composed of a plurality of columns in the same proportional position. An extracted feature matrix is divided into a plurality of small matrices horizontally, and each of the small feature matrices represents a corresponding matrix in the original image, which is a slicing operation.
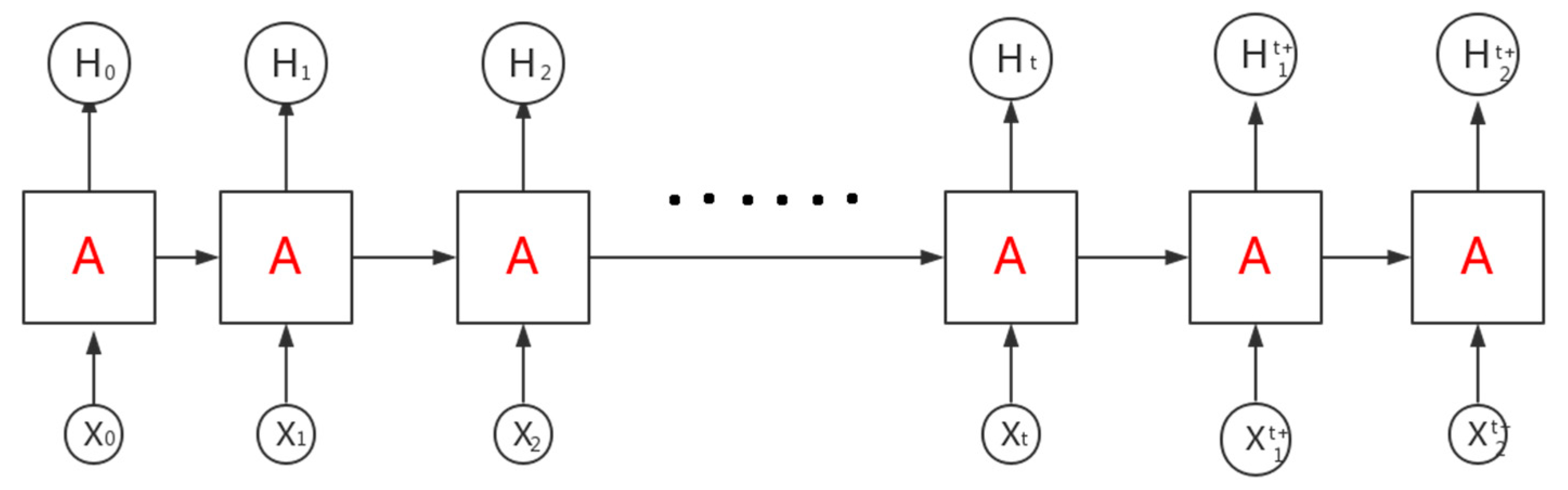
The structure of LSTM is shown in
Figure 9. Its input is a set of time-sequenced vectors. The corresponding output is also a set of time-sequenced information. In
Section 2.2, the defect image and the background image are periodically arranged and spliced into a long rectangular image to obtain a periodic defect sample. This sample is inputted into the designed CNN, and the output of the convolutional layer is extracted as the feature vector of the sample. Then, the feature vector is sliced into the input vector of LSTM.
(2) Training Using LSTM
LSTM was implemented using a Tensorflow [
17] framework in this study. The inputted format of LSTM in this framework was {batchsize, timestep, dims}, where batchsize is the training batch; timestep is the total number of time steps (each single defect enters the network at each timestep); and dims is the dimension of the input data.
The dimension of the extracted feature vectors was (7, 70, 512). We sliced it into a set {{7,7*512}, {7,7*512} ......{7,7*512}} of feature vectors as the input of LSTM, i.e., X0, X2 ……Xt. There are 70/7 = 10 timesteps of features. We added Xt+1, Xt+2, timestep = 12, and dims = {7,7*512}.
As shown in
Figure 9, the sliced feature vectors were inputted into the LSTM according to the timestep, and the output H of the last cell was the final result. H is a Boolean value. H = 1 means that the input sample is a periodic defect sample, H = others means that the input sample is not a periodic defect sample. The defect recognition network was trained according to the above rules.
3.3. The Improved Algorithm Based on CNN + LSTM + Attention
3.3.1. The Principle of the Attention Mechanism
In recent years, attention mechanisms have been widely used in various fields of deep learning [
18]. The uniquely human visual attention mechanism is a brain signal processing mechanism: human vision quickly scans the global image and obtains the focused target area, then pays more attention to this area to obtain more detailed useful information and suppresses other useless information.
The attention mechanism was used in the encoder-decoder framework in this study. However, the attention mechanism can be seen as a general idea that does not depend on an encoder-decoder framework.
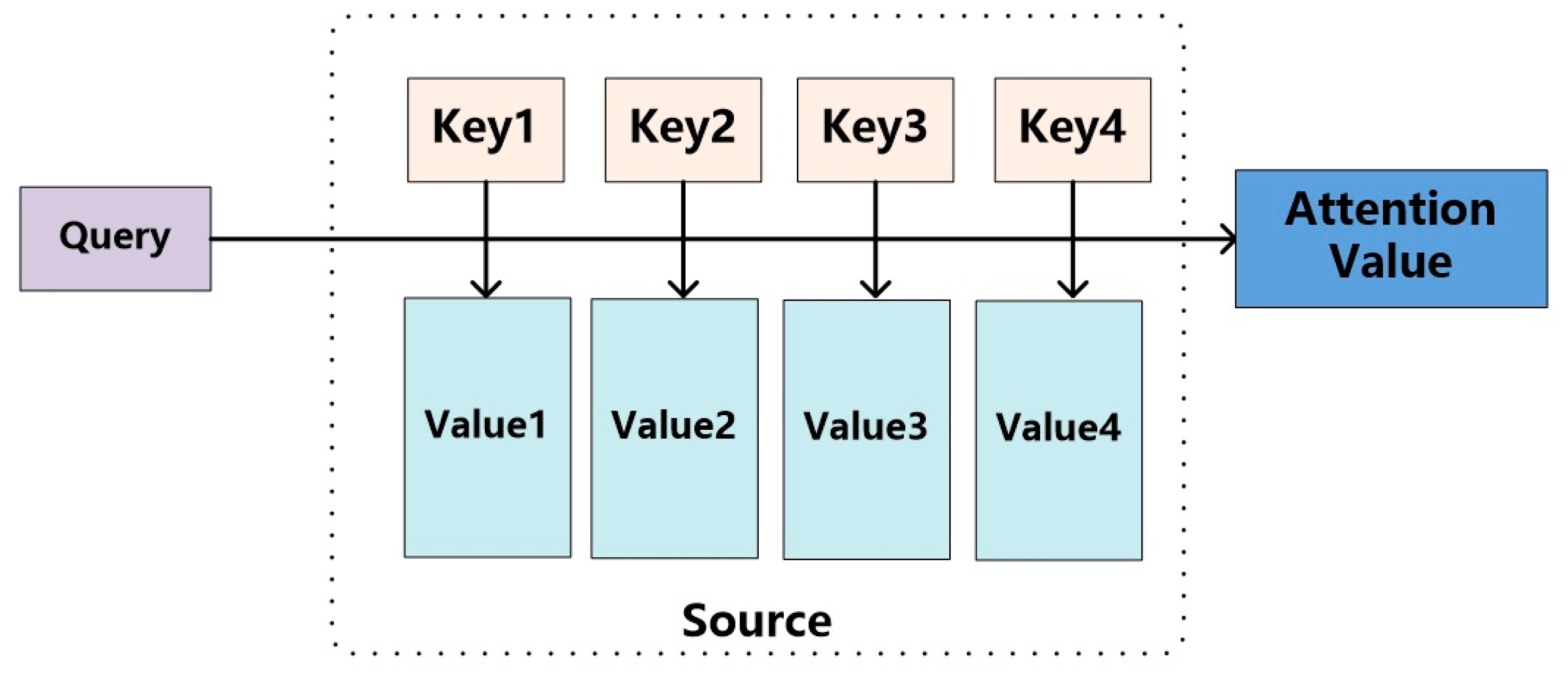
The abstract model of the attention mechanism is shown in
Figure 10. The elements in Source are a series of <Key, Value> data pairs. An element in the target area is queried. By calculating the similarity between
Query and
Keyi, each weight coefficient (
Similarity) corresponding to
Valuei is obtained, and then the weighted sum of
Valuei is calculated to obtain the final
attention value. So, essentially, the attention mechanism is a weighted sum of the
Value of the elements in the
Source, and
Query and
Key are used to calculate the weight coefficient of the
Value. That is, the essential idea can be rewritten as the following formula, where
Lx = ||
Source||, which represents the length of the
Source:
Conceptually, attention can be understood as filtering out a small amount of important information from a large amount of information, and then focusing on the important information and ignoring the unimportant information. The process of focusing is represented in the calculation of the weight coefficient. The larger the weight, the more focus is placed on its corresponding Value, that is, the weight represents the importance of the information, and the Value is its corresponding information.
3.3.2. The Principle of an Improved Algorithm with the Attention Mechanism
The attention mechanism was implemented in the encoder-decoder framework throughout the network [
19]. The encoder-decoder structure without the attention mechanism usually takes the last state of the encoder as the input to the decoder; the subsequent decoder process has nothing to do with the previous input, and is only related to the last inputted state. The encoder-decoder structure with the attention mechanism has different input states of the decoder at different times.
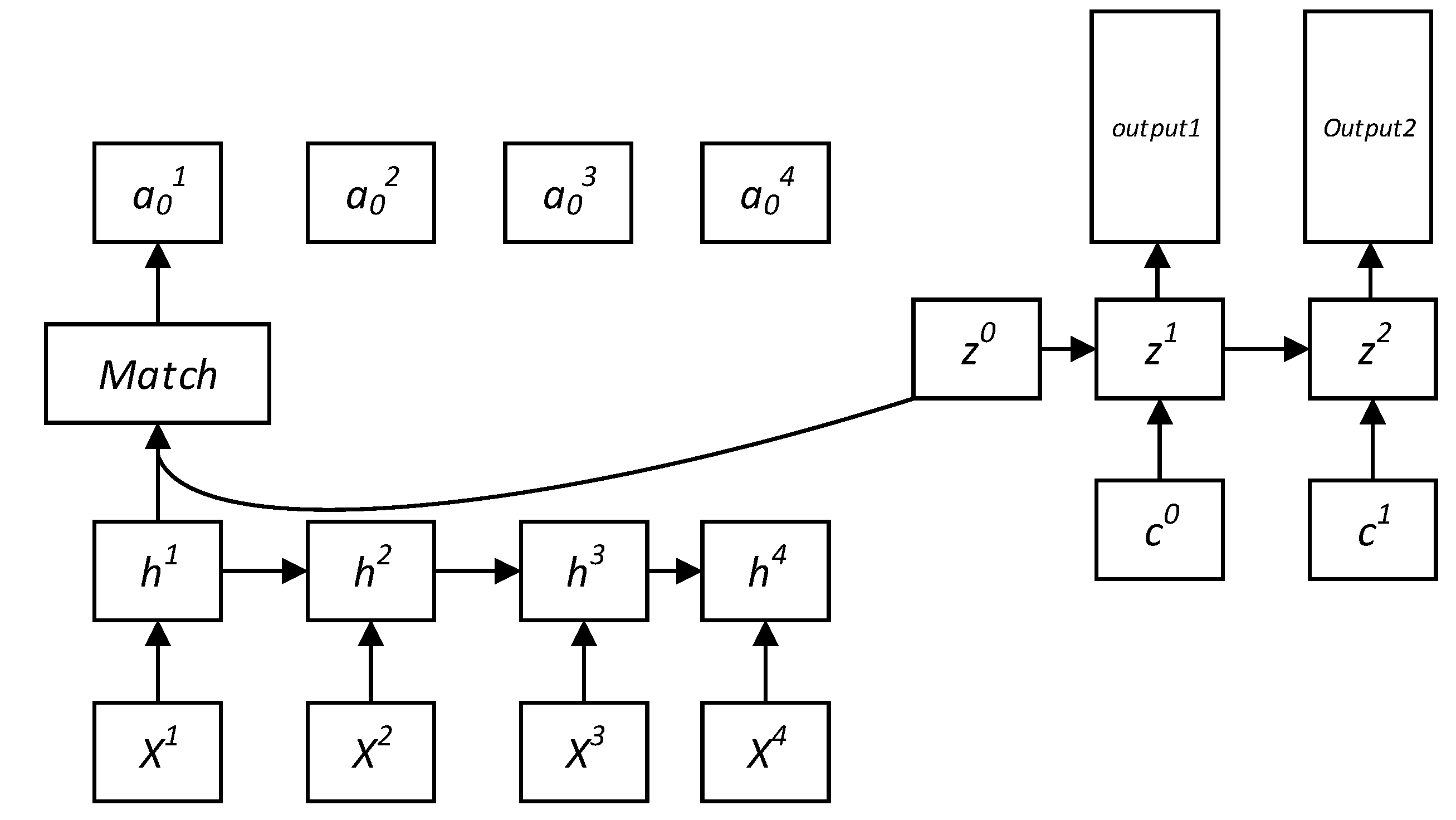
Figure 11 shows the structure of the implementation of the attention mechanism. The specific steps are as follows:
- (1)
The similarity between h1 (the hidden layer output vector of LSTM at the current time) and Z0 (the initial vector, the hidden state of the decoder) is calculated by the matching module “match”.
- (2)
The current output Z0 needs to be matched with each input (h1~h4) to obtain the similarity between the current output Z0 and all inputs (~).
- (3)
Normalize all similarities with the softmax function so that the sum of all similarities (i.e., weights) is 1.
- (4)
Calculate the weighted sum of each input (h1~h4) and its normalized weight (~), as the next input c0.
- (5)
Using c0 as the input of LSTM of the next timestep, the output hidden state z1 of the next timestep is determined by c0 and z0.
- (6)
Then, replace z0 with z1 and repeat steps (1)~(5) until the timesteps end.
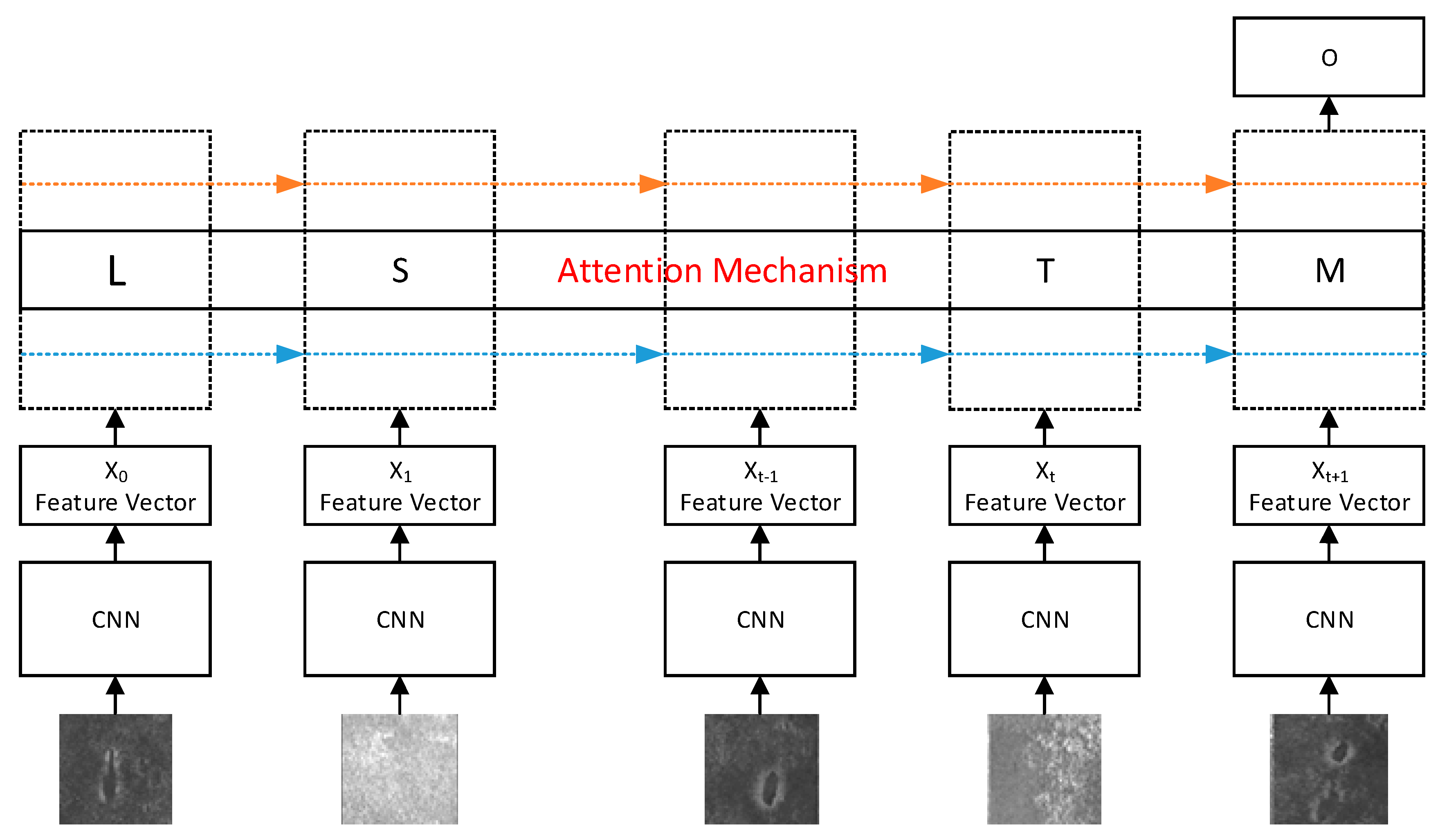
By introducing the above attention mechanism into the CNN + LSTM network presented in
Section 3, an improved algorithm was obtained, and its structure is shown in
Figure 12. First, the CNN extracts the feature of the periodic defect image. Then, the extracted feature vector is inputted into the LSTM with the attention mechanism. Finally, a value is outputted in the last output position. O is the final output, which represents whether there is a periodic defect in this image sequence or not.
4. Experiments
This study used the pre-training model of the VGG16 network provided by Keras without the final fully connected layer. This model, which has tuned network weights, is able to reduce the training time and improve the classification accuracy. We fine-tuned the weights based on this model.
Original real samples (1615 pieces) or amplified samples (15,000 pieces) were used as training sets. During the training, we set the learning rate = 1 × 10−6 and the epoch = 20. Twenty percent (20%) of the real samples (323 pieces) were used as the test set. The accuracy of the test set was used for a comparison, where the accuracy of the test set here is defined as: for a given test set, the ratio of the number of samples that were correctly recognized by the classifier to the total number of samples.
Table 1 shows the recognition accuracy of roll marks with VGG16, VGG16 + LSTM, and VGG16 + LSTM + Attention.
Table 1 shows that sample amplification obviously improves the recognition accuracy of all algorithms. However, even without sample amplification, both the VGG16 + LSTM algorithm and the improved VGG16 + LSTM + Attention algorithm significantly improved the recognition accuracy.
The recognition rate of the VGG16 + LSTM algorithm is higher than that of the VGG16 algorithm. VGG16 does not perform well because its inputted image is required to be inputted in the size of (244, 244), and some information is lost after the image is compressed. The information on periodic defects is more easily lost during compression due to its low number of appearances, so it is not suitable for periodic defect detection. The VGG16 + LSTM algorithm performs better because LSTM can remember the periodic defect information of the previous time and forget the information without a periodic defect of the current time, which recognizes periodic defects more effectively.
The recognition rate of VGG16 + LSTM + Attention is higher than that of VGG16 + LSTM. The reason for this is that the LSTM mixes the important information inputted at all previous times into the hidden layer state (memory module) at the last timestep. In contrast, the attention mechanism makes clearer that information at which time step is important (the image contains a defect), and provides the corresponding weight according to the degree of importance (the level of similarity between the inputted information at the current time and the hidden-layer state at the last time), which allows the network to better focus on the time when the defect image is input than the time when the background image is input, so that prevents the network from forgetting the defect feature because of the passage of a long period of time.
Next, the trained model is used to detect a real defect. The model performs well on roll marks with little scales.
Figure 13 shows the original image of well-recognized roll marks. The roll marks appear periodically and have little scales. This algorithm recognizes them well.
When a strong scale appears on the plates, its strong interference results in a low recognition rate.
Figure 14 below shows the unrecognized roll marks.
5. Conclusions
According to the features of periodic roll mark defects of medium and heavy plates, a periodic defect generator was designed and an CNN + LSTM detection algorithm was proposed and tested. Subsequently, an improved detection method with an attention mechanism algorithm was proposed and tested.
The experimental results showed that the periodic defect sample generator simulates real periodic defects well to some extent. The CNN + LSTM + Attention algorithm has a good ability to recognize periodic defects such as roll marks.
Although the algorithm proposed in this study was able to recognize most of the defects, the defect recognition rate with strong scales was found to be insufficient. The attention mechanism also increases the complexity of the algorithm and improves the requirements for computing resources. Our future research will consider using a more powerful feature extraction network and different kinds of training samples.
Author Contributions
Conceptualization, Y.L.; methodology, Y.L.; software, Y.L.; validation, Y.L.; investigation, Y.L.; resources, K.X., J.X.; data curation, K.X.; writing—original draft preparation, Y.L.; writing—review and editing, K.X.; visualization, Y.L.; supervision, K.X.; project administration, K.X.; funding acquisition, K.X., J.X.
Funding
This research was funded by the National Natural Science Foundation of China, grant number 51674031 and 51874022.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Li, Q.; Zhang, S.; Zhang, Z. Surface Defects Inspection Method for the Medium and Heavy Plate. Recent Pat. Mech. Eng. 2016, 9, 255–258. [Google Scholar]
- Yun, J.P.; Chang, H.P. Vision-based surface defect inspection for thick steel plates. Opt. Eng. 2017, 56, 053108. [Google Scholar] [CrossRef]
- Krummenacher, G.; Cheng, S.O.; Koller, S.; Kobayashi, S.; Buhmann, J.M. Wheel Defect Detection With Machine Learning. IEEE Trans. Intell. Transp. Syst. 2018, 99, 1–12. [Google Scholar] [CrossRef]
- Shanmugamani, R.; Sadique, M.; Ramamoorthy, B. Detection and classification of surface defects of gun barrels using computer vision and machine learning. Measurement 2015, 60, 222–230. [Google Scholar] [CrossRef]
- Shang, L.D.; Yang, Q.S.; Wang, J.N.; Li, S.B.; Lei, W.M. Detection of rail surface defects based on CNN image recognition and classification. In Proceedings of the 2018 20th International Conference on Advanced Communication Technology (ICACT), Chuncheon-si, Korea, 11–14 February 2018. [Google Scholar]
- Soukup, D.; Huber-Mörk, R. Convolutional Neural Networks for Steel Surface Defect Detection from Photometric Stereo Images. In International Symposium on Visual Computing; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Li, Y.; Li, G.; Jiang, M. An End-to-End Steel Strip Surface Defects Recognition System Based on Convolutional Neural Networks. Steel Res. Int. 2016, 88, 1060068. [Google Scholar]
- Di, H.; Ke, X.; Peng, Z. Defect detection of hot rolled steels with a new object detection framework called classification priority network. Comput. Ind. Eng. 2019, 128, 290–297. [Google Scholar]
- Shafiee, M.J.; Chywl, B.; Li, F.; Wong, A. Fast YOLO: A Fast You Only Look Once System for Real-time Embedded Object Detection in Video. Comput. Vis. Pattern Recognit. 2017, arXiv:1709.05943. [Google Scholar] [CrossRef]
- Karim, F.; Majumdar, S.; Darabi, H.; Chen, S. LSTM Fully Convolutional Networks for Time Series Classification. IEEE Access 2017, 6, 1662–1669. [Google Scholar] [CrossRef]
- Chen, J.L.; Wang, Y.L.; Wu, Y.J.; Cai, C.Q. An Ensemble of Convolutional Neural Networks for Image Classification Based on LSTM. In Proceedings of the International Conference on Green Informatics, Fuzhou, China, 15–17 August 2017. [Google Scholar]
- Bao, W.; Yue, J.; Rao, Y. A deep learning framework for financial time series using stacked autoencoders and long-short term memory. PLoS ONE 2017, 12, e0180944. [Google Scholar] [CrossRef] [PubMed]
- Ge, H.W.; Yan, Z.H.; Yu, W.H.; Sun, L. An attention mechanism based convolutional LSTM network for video action recognition. Multimed. Tools Appl. 2019, 78, 1–24. [Google Scholar] [CrossRef]
- Zheng, F.M.; Li, S.F.; Guo, Z.M.; Wu, B.; Tian, S.M.; Pan, M.M. Anomaly detection in smart grid based on encoder-decoder framework with recurrent neural network. J. China Univ. Posts Telecommun. 2017, 24, 71–77. [Google Scholar]
- Qassim, H.; Verma, A.; Feinzimer, D. Compressed residual-VGG16 CNN model for big data places image recognition. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018. [Google Scholar]
- Shi, X.J.; Chen, Z.R.; Wang, H.; Yeung, D.; Wong, W.; Woo, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. Comput. Vis. Pattern Recognit. 2015, arXiv:1506.04214. [Google Scholar]
- Baylor, D.; Breck, E.; Cheng, H.T.; Fiedel, N.; Foo, C.Y.; Haque, Z.; Haykal, S.; Ispir, M.; Jaon, V.; Koc, L.; et al. TFX: A TensorFlow-Based Production-Scale Machine Learning Platform. In Proceedings of the 23rd ACM SIGKDD International Conference, Halifax, NS, Canada, 13–17 August 2017. [Google Scholar]
- Längkvist, M.; Loutfi, A. A Deep Learning Approach with an Attention Mechanism for Automatic Sleep Stage Classification. Mach. Learn. 2018, arXiv:1805.05036. [Google Scholar]
- Ji, Z.; Xiong, K.L.; Pang, Y.W.; Li, X.L. Video Summarization with Attention-Based Encoder-Decoder Networks. IEEE Trans. Circuits Syst. Video Technol. 2019. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}