A Novel Method of Adaptive Kalman Filter for Heading Estimation Based on an Autoregressive Model

Abstract
:1. Introduction
2. Heading Estimation Based on an AR Model
2.1. KF Process
2.2. AR Model
2.3. Derivation of AR Model under KF Frame
2.4. The Adaptive Kalman Filter
3. The Calculation of Measurement Vector for Heading Estimation
3.1. Heading Estimation by Magnetometer
3.2. Heading Estimation Based on Gyroscope
3.3. Fused Heading Estimation
4. The Filter Design of KF Based on AR Model for Heading Estimation
5. The Detection of a QS Magnetic Field
| Algorithm 1: The heading estimation with KF based on AR model |
|
6. Position Estimation of PDR Algorithm
6.1. The Principle of PDR Algorithm
6.2. Filter Design of UKF for Position Estimation
7. Experimental Analysis
7.1. Static Experiment
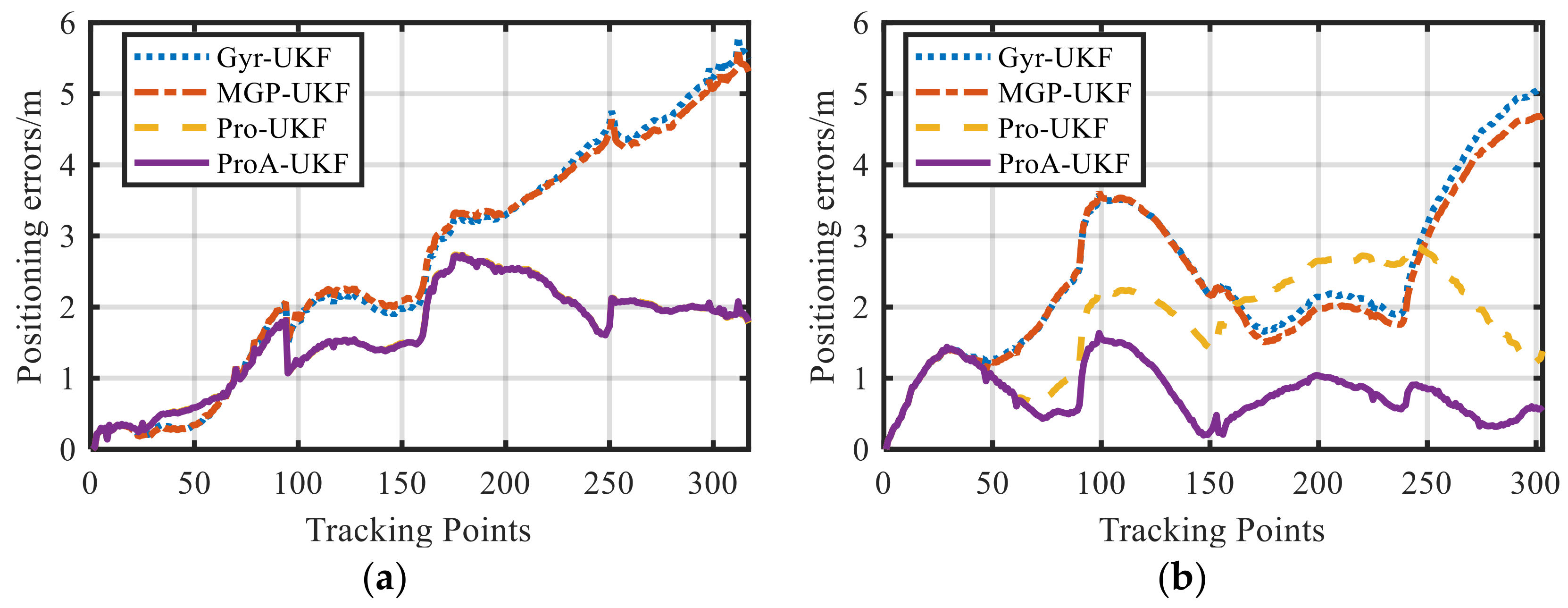
7.2. Kinematic Experiment
- (1)
- The Gyr is used to calculate heading, and UKF is used for position estimation (Gyr-UKF).
- (2)
- The MGP is used to obtain heading, and position is estimated based on UKF (MGP-UKF).
- (3)
- The Pro is applied to estimate heading, and position estimation is obtained by UKF (MGP-UKF).
- (4)
- The ProA is applied to estimate heading, and UKF is used for position estimation (MGP-UKF).
8. Conclusions
- (1)
- The heading calculated by a magnetometer is susceptible to disturbances in the complex indoor environment that can cause dozens of degrees bias. Also, it is possible that the heading calculated by magnetometer is close to the reference at some locations. The heading estimated by gyroscope is affected by cumulative error. The heading obtained by the proposed method can not only reduce the noise but also constraint the cumulative error.
- (2)
- Compared with the mean accuracy of traditional methods for heading estimation, the mean accuracy of the heading estimated by proposed algorithm is increased by 35.62% and 35.86%, respectively, for HV9 and XM8. And compared with KF, AKF can further improve the accuracy of heading estimation.
- (3)
- The estimated heading is used for position calculation of PDR. Compared to traditional methods, the mean errors of position estimation for the proposed method decrease by 40.00% and 66.39%, and the corresponding RMS is improved by 43.87% and 66.79%, respectively, for HV9 and XM8 smartphones with different performance sensors.
Author Contributions
Funding
Conflicts of Interest
References
- Alletto, S.; Cucchiara, R.; Fiore, G.; Mainetti, L.; Mighali, V.; Patrono, L.; Serra, G. An indoor location-aware system for an IoT-based smart museum. IEEE Internet Things J. 2016, 3, 244–253. [Google Scholar] [CrossRef]
- Chen, J.; Ou, G.; Peng, A.; Zheng, L.; Shi, J. An INS/WiFi indoor localization system based on the weight least squares. Sensors 2018, 15, 1458. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Yang, J.; Sidhom, S.; Wang, Y.; Chen, Y.; Ye, F. Accurate WiFi based localization for smartphone using peer assistance. IEEE Trans. Mob. Comput. 2014, 13, 2199–2213. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C. A Bluetooth/PDR integration algorithm for an indoor positioning system. Sensors 2015, 15, 24862–24885. [Google Scholar] [CrossRef]
- Chen, P.; Kuang, Y.; Chen, X. A UWB/Improved PDR Integration Algorithm Applied to Dynamic Indoor Positioning for Pedestrians. Sensors 2017, 17, 2065. [Google Scholar] [CrossRef]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/Smartphone using an adaptive system noise extended Kalman filter algorithm for indoor localization. Int. J. Geo-Inf. 2016, 5, 8. [Google Scholar] [CrossRef]
- Chen, R.; Chen, L. Indoor positioning with smartphones: The state-of-art and challenges. Acta Geod. Cartogr. Sin. 2017, 46, 1316–1326. [Google Scholar]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhou, Q.; Niu, X.; El-Sheimy, N. A hybrid WiFi/Magnetic matching/PDR approach for indoor navigation with smartphone sensors. IEEE Commun. Lett. 2016, 20, 169–172. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.J.; Chen, X. Robust pedestrian dead reckoning based on MEMS-IMU for smartphone. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef] [PubMed]
- Davidson, P.; Takala, J. Algorithm for pedestrian navigation combining IMU measurements and gait models. Gyroscope Navig. 2013, 4, 79–84. [Google Scholar] [CrossRef]
- Gu, Y.; Song, Q.; Li, Y.; Ma, M. Foot-mounted pedestrian navigation based on particle filter with an adaptive weight updating strategy. J. Navig. 2015, 68, 23–38. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi integration based on handheld devices for indoor pedestrian navigation. Sensors 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Kim, Y.; Choi, S.; Kim, H.; Lee, J. Performance improvement and height estimation of pedestrian dead-reckoning system using a low cost MEMS sensor. In Proceedings of the 12th International Conference on Control, Automation and Systems, Jeju Island, Korea, 17–21 October 2012. [Google Scholar]
- Kang, W.; Nam, S.; Lee, S. Improved heading estimation for smartphone-based indoor positioning systems. In Proceedings of the 2012 IEEE 23rd International Symposium on Personal, Indoor and Mobile Radio Communications, Sydney, Australia, 9–12 September 2012. [Google Scholar]
- Brajdic, A.; Harle, R. Walk detection and step counting on unconstrained smartphones. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013. [Google Scholar]
- Hasan, M.; Mishuk, M. MEMS IMU based pedestrian indoor navigation for smart glass. Wirel. Pers. Commun. 2018, 101, 287–303. [Google Scholar] [CrossRef]
- Tian, Z.; Zhang, Y.; Zhou, M.; Liu, Y. Pedestrian dead reckoning for MARG navigation using a smartphone. J. Adv. Signal Process. 2014, 65, 65–73. [Google Scholar] [CrossRef]
- Gade, K. The seven ways to find heading. J. Navig. 2016, 69, 955–970. [Google Scholar] [CrossRef]
- Afzal, M.; Renaudin, V.; Lachapelle, G. Magnetic field based heading estimation for pedestrian navigation environments. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011. [Google Scholar]
- Zheng, Z.; Hu, Y.; Yu, J.; Na, Z. Extended Kalman filter for real time indoor localization by fusing WiFi and smartphone inertial sensors. Sensors 2015, 6, 523–543. [Google Scholar]
- Kang, W.; Han, Y.N. SmartPDR: Smartpone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Valenti, R.; Dryanovski, I.; Xiao, J. A linear Kalman filter for MARG orientation estimation using the algebraic quaternion algorithm. IEEE Trans. Instrum. Meas. 2015, 65, 467–481. [Google Scholar] [CrossRef]
- Renaudin, V.; Combettes, C.; Peyret, F. Quaternion based heading estimation with handheld MEMS in indoor environments. In Proceedings of the IEEE/ION Positioning, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Yuan, X.; Yu, S.; Zhang, S. Quaternion-based unscented Kalman filter for accurate indoor heading estimation using wearable multi-sensor system. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef]
- Afzal, M.; Renaudin, V.; Lachapelle, G. Use of earth’s magnetic field for mitigating gyroscope errors regardless of magnetic perturbation. Sensors 2011, 11, 11390–11414. [Google Scholar] [CrossRef]
- Ali, A.; El-Sheimy, N. Low-cost MEMS-based pedestrian navigation technique for GPS-denied areas. J. Sens. 2013, 2013, 197090. [Google Scholar] [CrossRef]
- Mohamed, A.; Schwarz, K. Adaptive Kaman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Chang, G.; Liu, M. An adaptive fading Kalman filter based on Mahalanobis distance. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1114–1123. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S. A novel adaptively-robust strategy based on the Mahalanobis distance for GPS/INS integrated navigation systems. Sensors 2018, 18, 695. [Google Scholar] [CrossRef]
- Wu, D.; Xia, L.; Geng, J. Heading estimation for pedestrian dead reckoning based on robust adaptive Kalman Filtering. Sensors 2018, 18, 1970. [Google Scholar] [CrossRef]
- Li, W.; Wang, J. Effective adaptive Kalman filter for MEMS-IMU/Magnetometers integrated attitude and heading reference system. J. Navig. 2013, 66, 99–113. [Google Scholar] [CrossRef]
- Jin, B.; Guo, J.; He, J.; Guo, W. Adaptive Kalman filter based on optimal autoregressive predictive model. GPS Solut. 2017, 21, 307–317. [Google Scholar] [CrossRef]
- Jin, B.; Su, T.; Zhang, W.; Zhang, L. Joint optimization of predictive model and transmitted waveform for extended target tracking. In Proceedings of the 2014 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014. [Google Scholar]
- Ding, W.; Wang, J.; Rizos, C. Improving adaptive Kalman estimation in GPS/INS integration. J. Navig. 2007, 60, 517–529. [Google Scholar] [CrossRef]
- Renaudin, V.; Afzal, M.; Lachapelle, G. Complete triaxis magnetometer calibration in the magnetic domain. J. Sens. 2010, 2010, 967245. [Google Scholar] [CrossRef]
- Klingbeik, L.; Eling, C.; Zimmermann, F.; Kuhlmann, H. Magnetic field sensor calibration for attitude determination. J. Appl. Geod. 2014, 8, 97–108. [Google Scholar]
- Ma, M.; Song, Q.; Gu, Y.; Zhou, Z. Use of magnetic field for mitigating gyroscope errors for indoor pedestrian positioning. Sensors 2018, 18, 2592. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor location method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, New York, NY, USA, 5–8 September 2012. [Google Scholar]
- Chen, G.; Meng, X.; Wang, Y.; Zhang, Y.; Tian, P.; Yang, H. Integrated WiFi/PDR/Smartphone using an unscented Kalman filter algorithm for 3D indoor localization. Sensors 2015, 15, 24595–24614. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mag | Gyr | MGP | Pro | ProA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMS/° | Mean/° | RMS/° | Mean/° | RMS/° | Mean/° | RMS/° | Mean/° | RMS/° | Mean/° | |
| A | 8.28 | −0.84 | 2.40 | 1.10 | 2.20 | 1.00 | 1.74 | 0.09 | 1.74 | 0.12 |
| B | 8.73 | −4.32 | 1.39 | 0.53 | 1.17 | 0.55 | 1.09 | 0.49 | 1.09 | 0.47 |
| C | 9.61 | −5.74 | 3.13 | −2.50 | 3.01 | −2.47 | 1.26 | 0.05 | 1.27 | 0.04 |
| D | 7.85 | −0.40 | 2.59 | −2.06 | 2.38 | −1.98 | 1.55 | 0.43 | 1.55 | 0.42 |
| Mean/° | 8.62 | −2.83 | 2.38 | −0.73 | 2.19 | −0.73 | 1.41 | 0.27 | 1.41 | 0.26 |
| Mag | Gyr | MGP | Pro | ProA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMS/° | Mean/° | RMS/° | Mean/° | RMS/° | Mean/° | RMS/° | Mean/° | RMS/° | Mean/° | |
| A | 3.55 | −0.08 | 3.55 | 2.67 | 3.45 | 2.50 | 2.25 | 1.07 | 1.70 | 0.47 |
| B | 10.20 | 6.50 | 3.77 | 0.76 | 3.66 | 0.88 | 3.28 | 1.85 | 2.69 | −0.36 |
| C | 14.76 | −10.95 | 5.41 | 3.92 | 5.35 | 3.99 | 3.39 | 2.85 | 2.02 | 1.00 |
| D | 15.02 | −13.00 | 5.57 | −4.58 | 5.51 | −4.58 | 2.58 | 2.24 | 2.19 | 1.76 |
| Mean/° | 10.88 | −4.38 | 4.58 | 0.69 | 4.49 | 0.69 | 2.88 | 2.00 | 2.15 | 0.71 |
| Gyr-UKF | MGP-UKF | Pro-UKF | ProA-UKF | ||
|---|---|---|---|---|---|
| HV9 | Max/m | 5.80 | 5.63 | 2.75 | 2.73 |
| Mean/m | 2.67 | 2.65 | 1.60 | 1.59 | |
| RMS/m | 3.14 | 3.10 | 1.75 | 1.74 | |
| XM8 | Max/m | 5.05 | 4.69 | 2.89 | 1.63 |
| Mean/m | 2.47 | 2.38 | 1.81 | 0.80 | |
| RMS/m | 2.73 | 2.62 | 1.94 | 0.87 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chai, D.; Chen, G.; Wang, S. A Novel Method of Adaptive Kalman Filter for Heading Estimation Based on an Autoregressive Model. Appl. Sci. 2019, 9, 3727. https://doi.org/10.3390/app9183727
Chai D, Chen G, Wang S. A Novel Method of Adaptive Kalman Filter for Heading Estimation Based on an Autoregressive Model. Applied Sciences. 2019; 9(18):3727. https://doi.org/10.3390/app9183727
Chicago/Turabian StyleChai, Dashuai, Guoliang Chen, and Shengli Wang. 2019. "A Novel Method of Adaptive Kalman Filter for Heading Estimation Based on an Autoregressive Model" Applied Sciences 9, no. 18: 3727. https://doi.org/10.3390/app9183727
APA StyleChai, D., Chen, G., & Wang, S. (2019). A Novel Method of Adaptive Kalman Filter for Heading Estimation Based on an Autoregressive Model. Applied Sciences, 9(18), 3727. https://doi.org/10.3390/app9183727