High Speed 3D Shape Measurement with Temporal Fourier Transform Profilometry



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
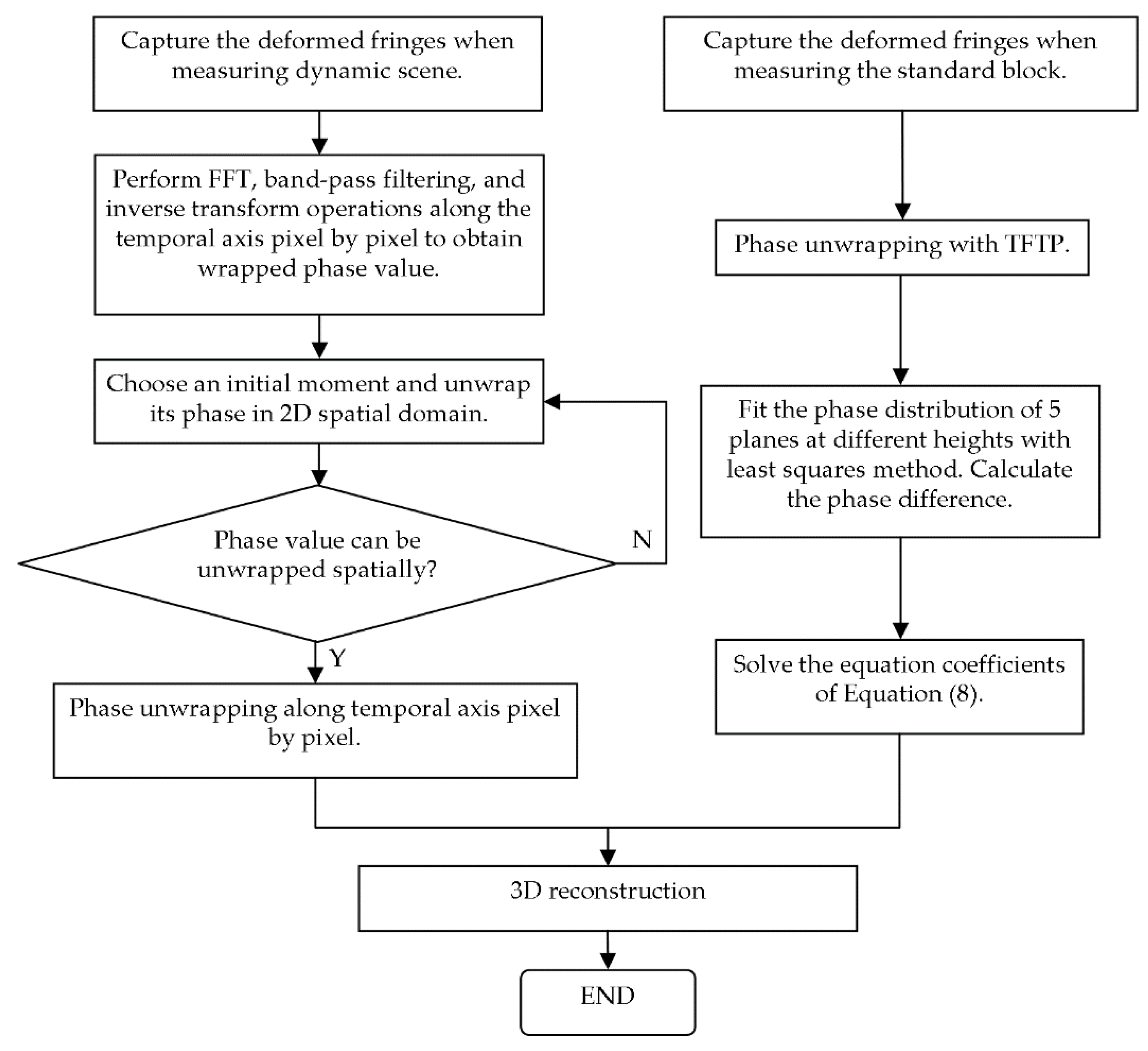
2. Principles
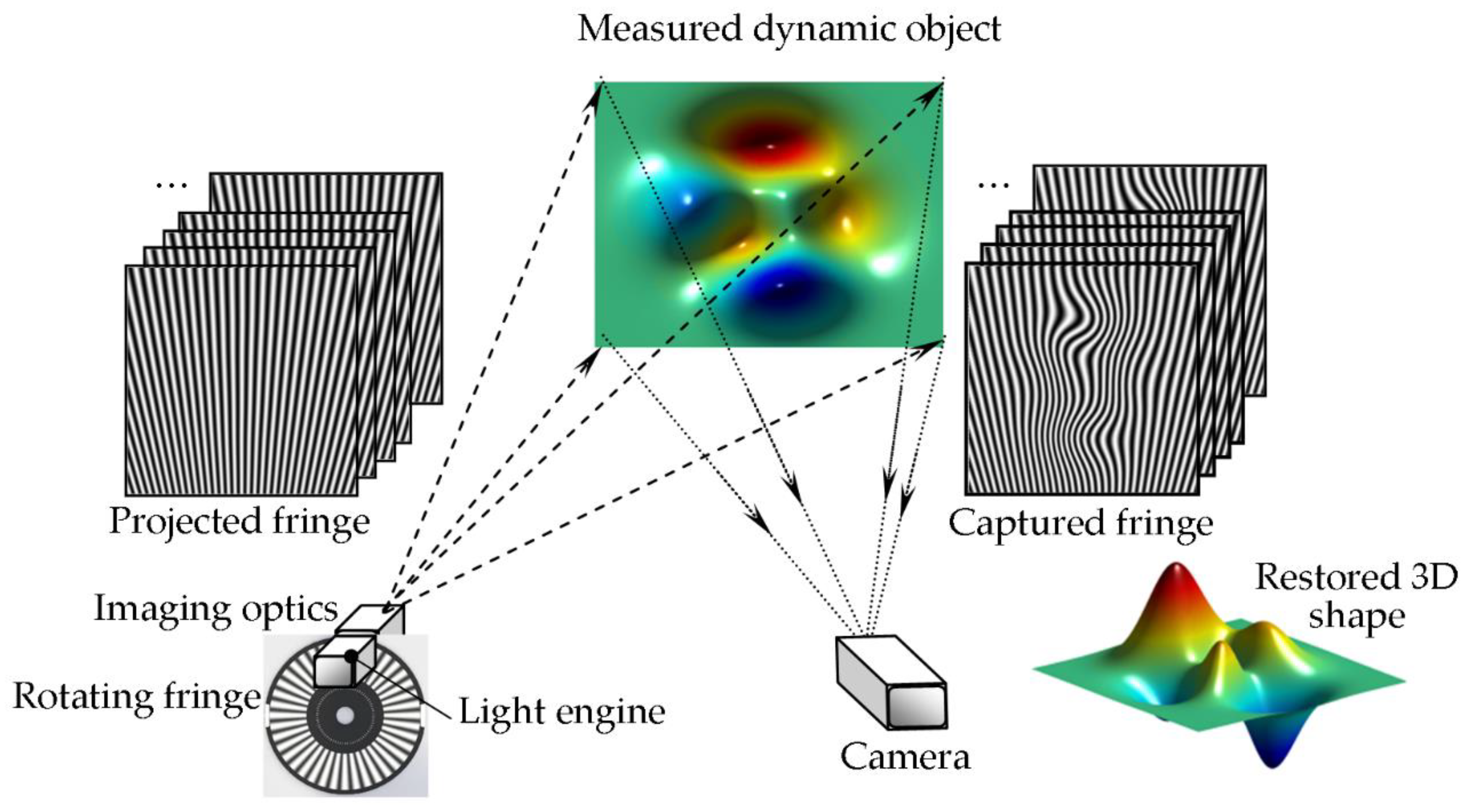
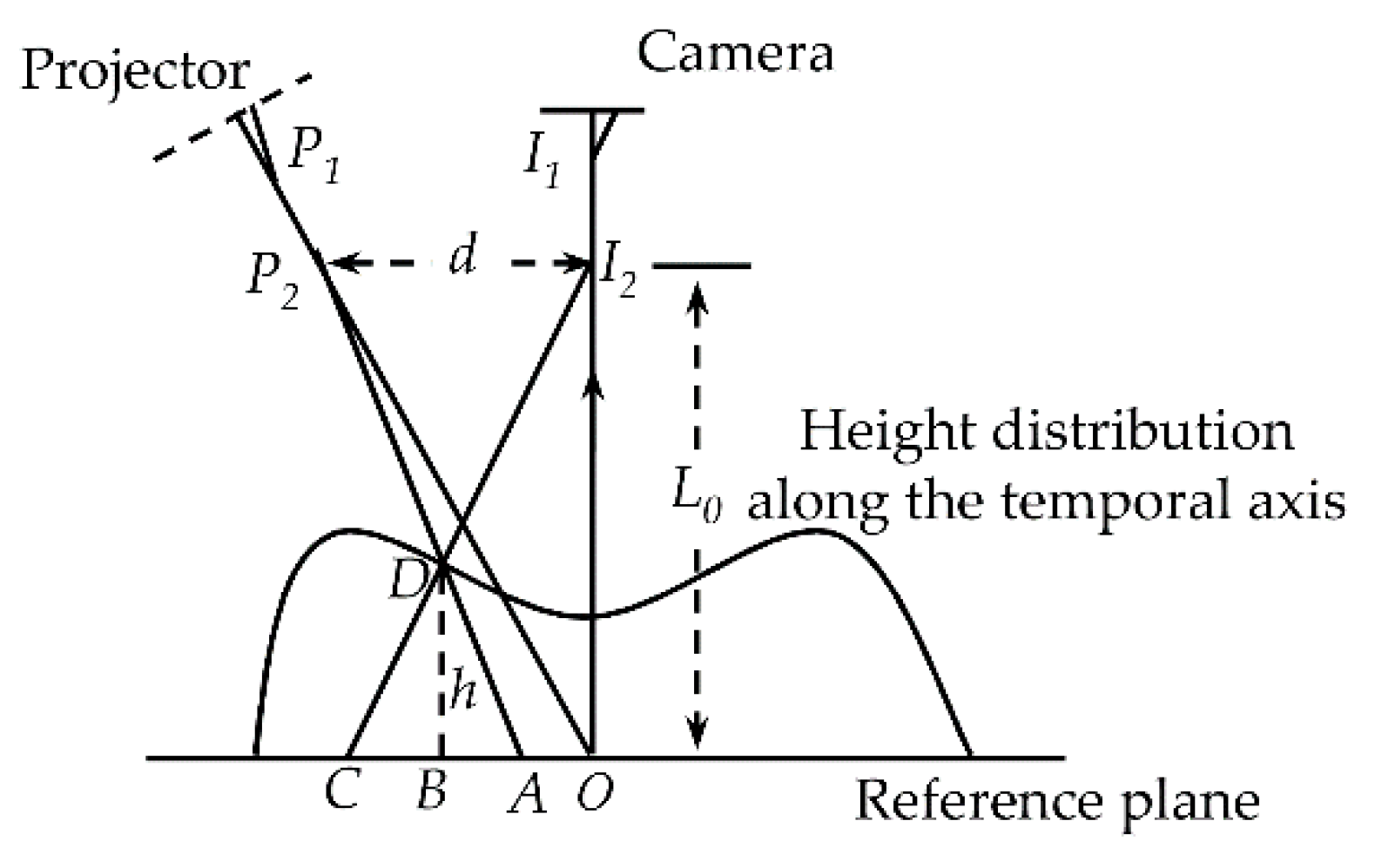
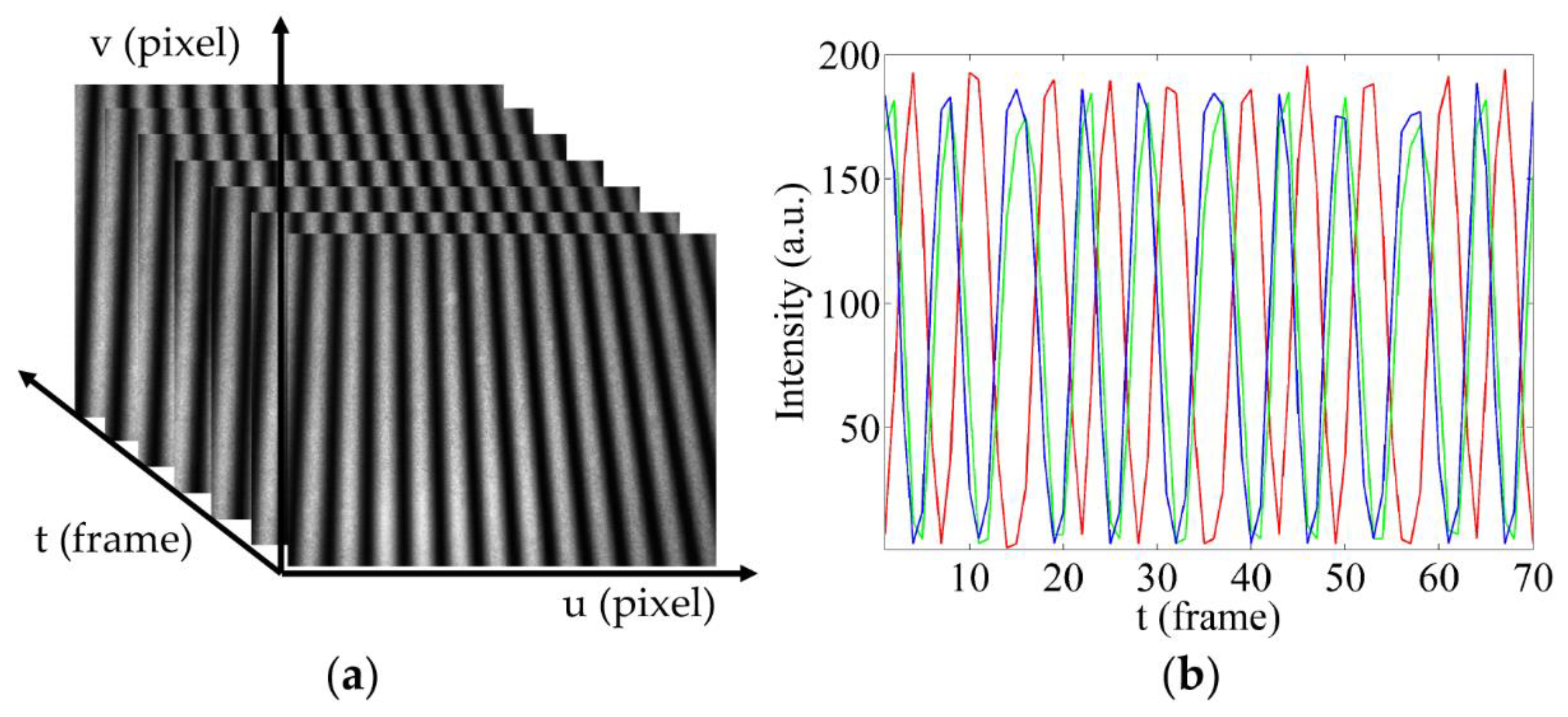
2.1. Principle of TFTP
2.2. The Measuring Limitation of TFTP
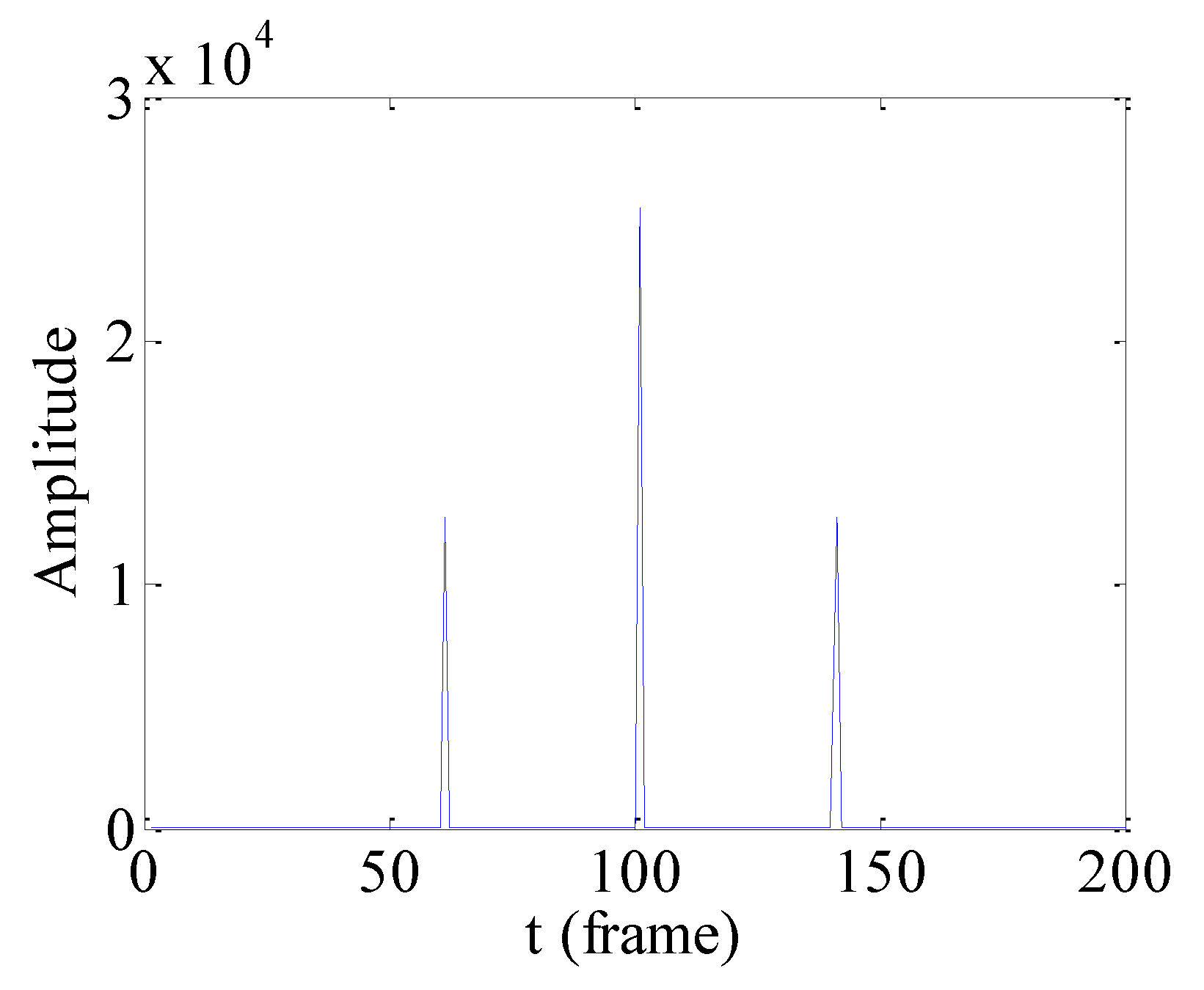
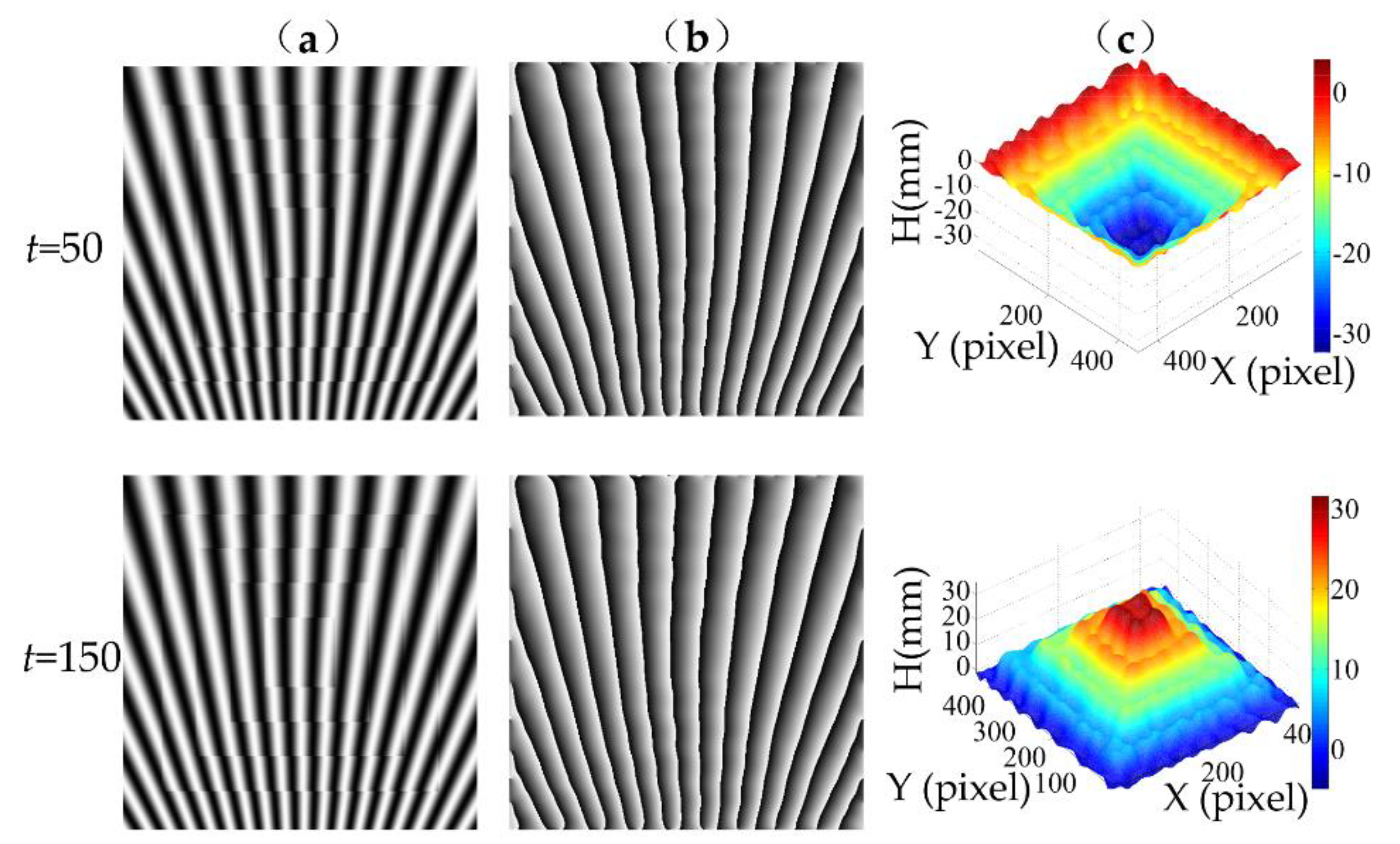
3. Computer Simulation
4. Experimental Results
4.1. System Calibration
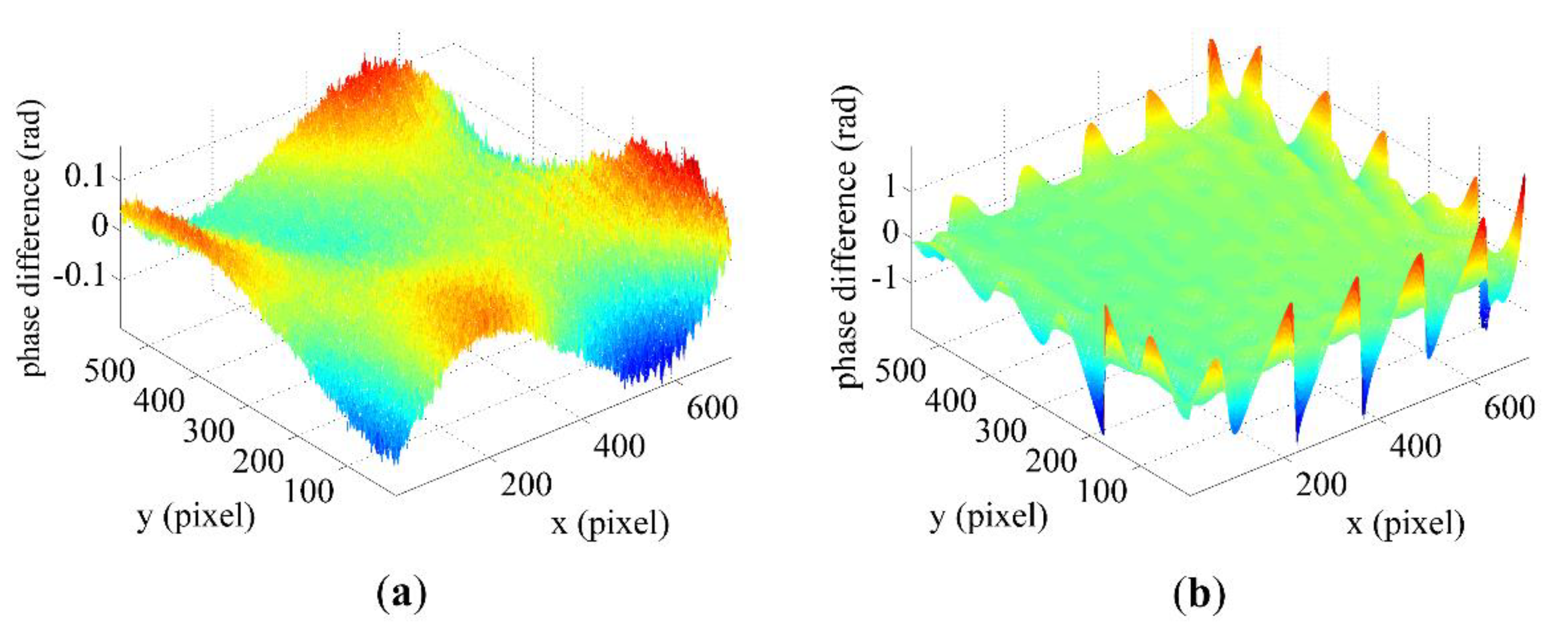
4.2. Accuracy Evaluation of TFTP
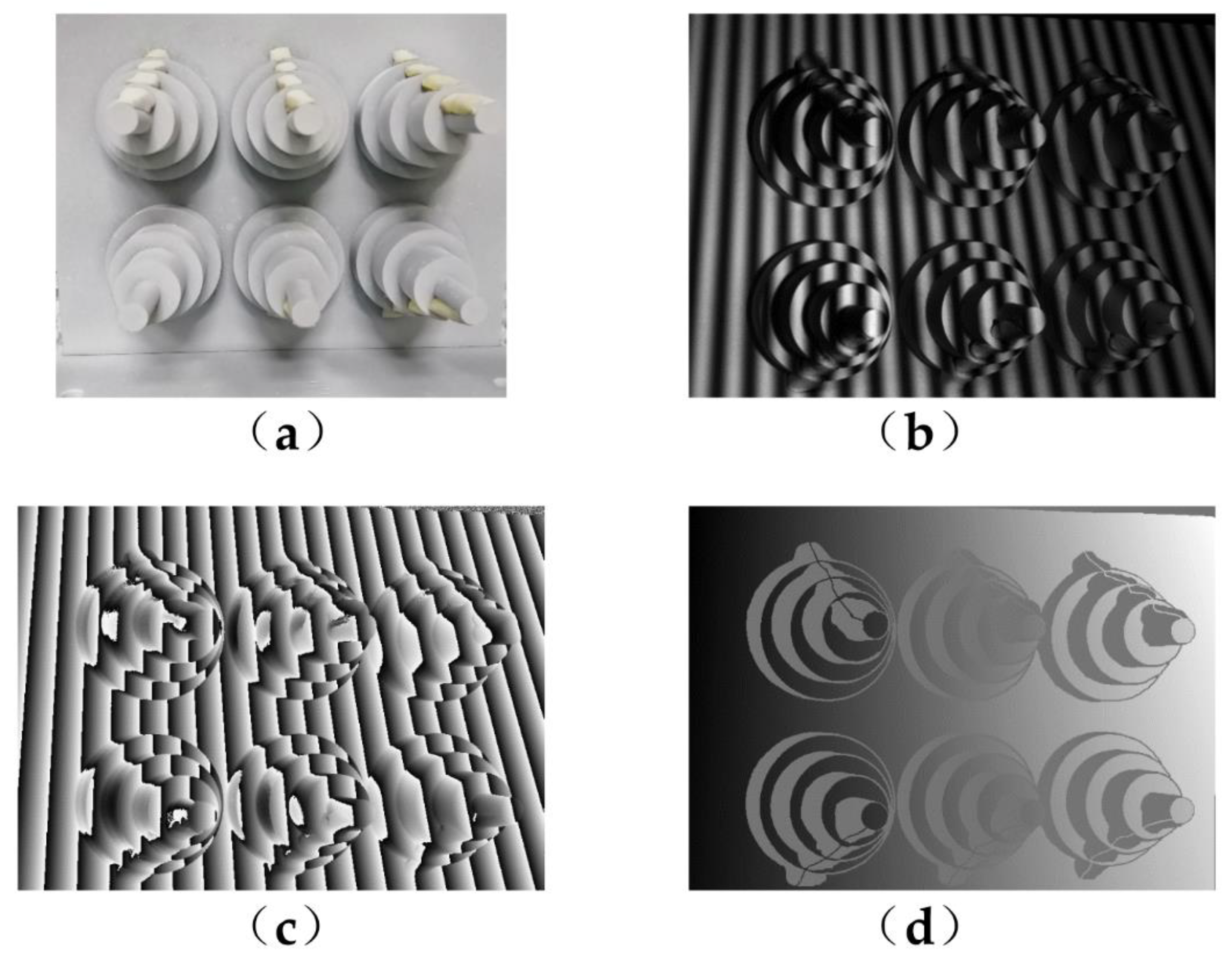
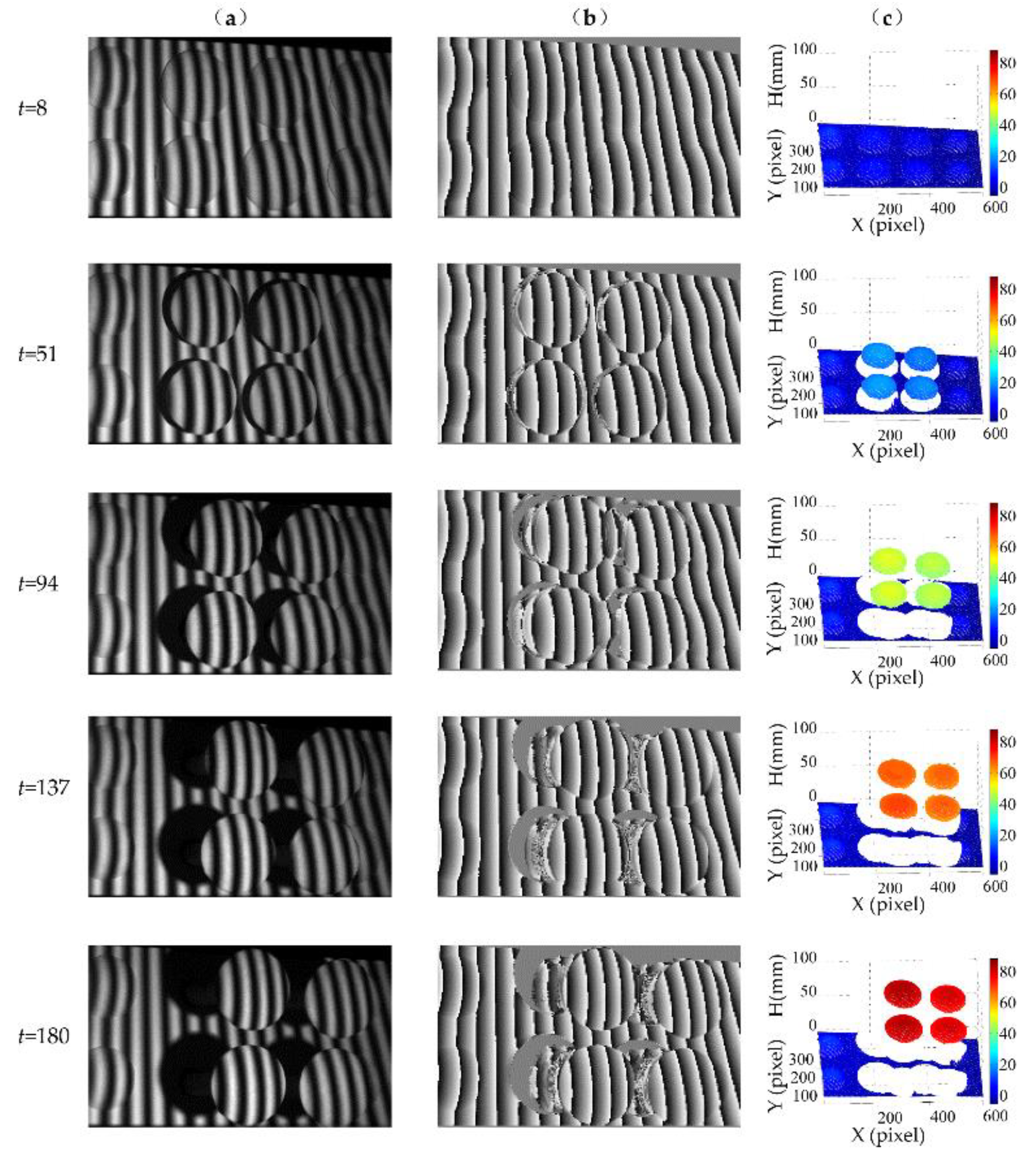
4.3. Dynamic Measurement
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gorthi, S.S.; Rastogi, P. Fringe projection techniques: Whither we are? Opt. Laser Eng. 2010, 48, 133–140. [Google Scholar] [CrossRef]
- Chen, F.; Brown, G.; Song, M. Overview of three-dimensional shape measurement using optical methods. Opt. Eng. 2000, 39, 10–22. [Google Scholar]
- Halioua, M.; Liu, H.C. Optical three-dimensional sensing by phase measurement profilometry. Opt. Laser Eng. 1989, 11, 185–215. [Google Scholar] [CrossRef]
- Zuo, C.; Feng, S.J.; Huang, L.; Tao, T.Y.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Laser Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Takeda, M.; Mutoh, K. Fourier Transform Profilometry for the auto measurement of 3-D object shapes. Appl. Opt. 1983, 22, 3977–3982. [Google Scholar] [CrossRef] [PubMed]
- Su, X.Y.; Chen, W.J. Fourier transform profilometry: A review. Opt. Laser Eng. 2001, 35, 263–284. [Google Scholar] [CrossRef]
- Su, X.Y.; Zhang, Q.C. Dynamic 3D shape measurement method: A review. Opt. Laser Eng. 2010, 48, 191–204. [Google Scholar] [CrossRef]
- Wissmann, P.; Forster, F.; Schmitt, R. Fast and low-cost structured light pattern sequence projection. Opt. Express 2011, 19, 24657–24671. [Google Scholar] [CrossRef] [PubMed]
- Heist, S.; Mann, A.; Kühmstedt, P.; Schreiber, P.; Notni, G. Array projection of aperiodic sinusoidal fringes for high-speed three-dimensional shape measurement. Opt. Eng. 2014, 53, 112208. [Google Scholar] [CrossRef]
- Heist, S.; Lutzke, P.; Schmidt, I.; Dietrich, P.; Kühmstedt, P.; Tünnermann, A.; Notni, G. High-speed three-dimensional shape measurement using GoBo projection. Opt. Laser Eng. 2016, 87, 90–96. [Google Scholar] [CrossRef]
- Hyun, J.; Chiu, G.; Zhang, S. High-speed and high-accuracy 3D surface measurement using a mechanical projector. Opt. Express 2018, 26, 1474–1487. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S. High-speed 3D shape measurement with structured light methods: A review. Opt. Laser Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Zhou, W.S.; Su, X.Y. A Direct Mapping Algorithm for Phase-measuring Profilometry. J. Mod. Opt. 1994, 41, 89–94. [Google Scholar] [CrossRef]
- Su, X.Y.; Song, W.Z.; Cao, Y.P.; Xiang, L.Q. Phase-height mapping and coordinate calibration simultaneously in phase-measuring profilometry. Opt. Eng. 2004, 43, 708–712. [Google Scholar]
- Su, X.Y.; Chen, W.J. Reliability-guided phase unwrapping algorithm: A review. Opt. Laser Eng. 2004, 42, 245–261. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, Q.; Li, Y.; Liu, Y. High Speed 3D Shape Measurement with Temporal Fourier Transform Profilometry. Appl. Sci. 2019, 9, 4123. https://doi.org/10.3390/app9194123
Zhang H, Zhang Q, Li Y, Liu Y. High Speed 3D Shape Measurement with Temporal Fourier Transform Profilometry. Applied Sciences. 2019; 9(19):4123. https://doi.org/10.3390/app9194123
Chicago/Turabian StyleZhang, Haihua, Qican Zhang, Yong Li, and Yihang Liu. 2019. "High Speed 3D Shape Measurement with Temporal Fourier Transform Profilometry" Applied Sciences 9, no. 19: 4123. https://doi.org/10.3390/app9194123