Design of Positioning Mechanism Fit Clearances Based on On-Orbit Re-Orientation Accuracy


Abstract
Featured Application
Abstract
1. Introduction
2. The Kinematic Positioning Principle of the Optical Unit and the Mathematical Model of Rotation Angles
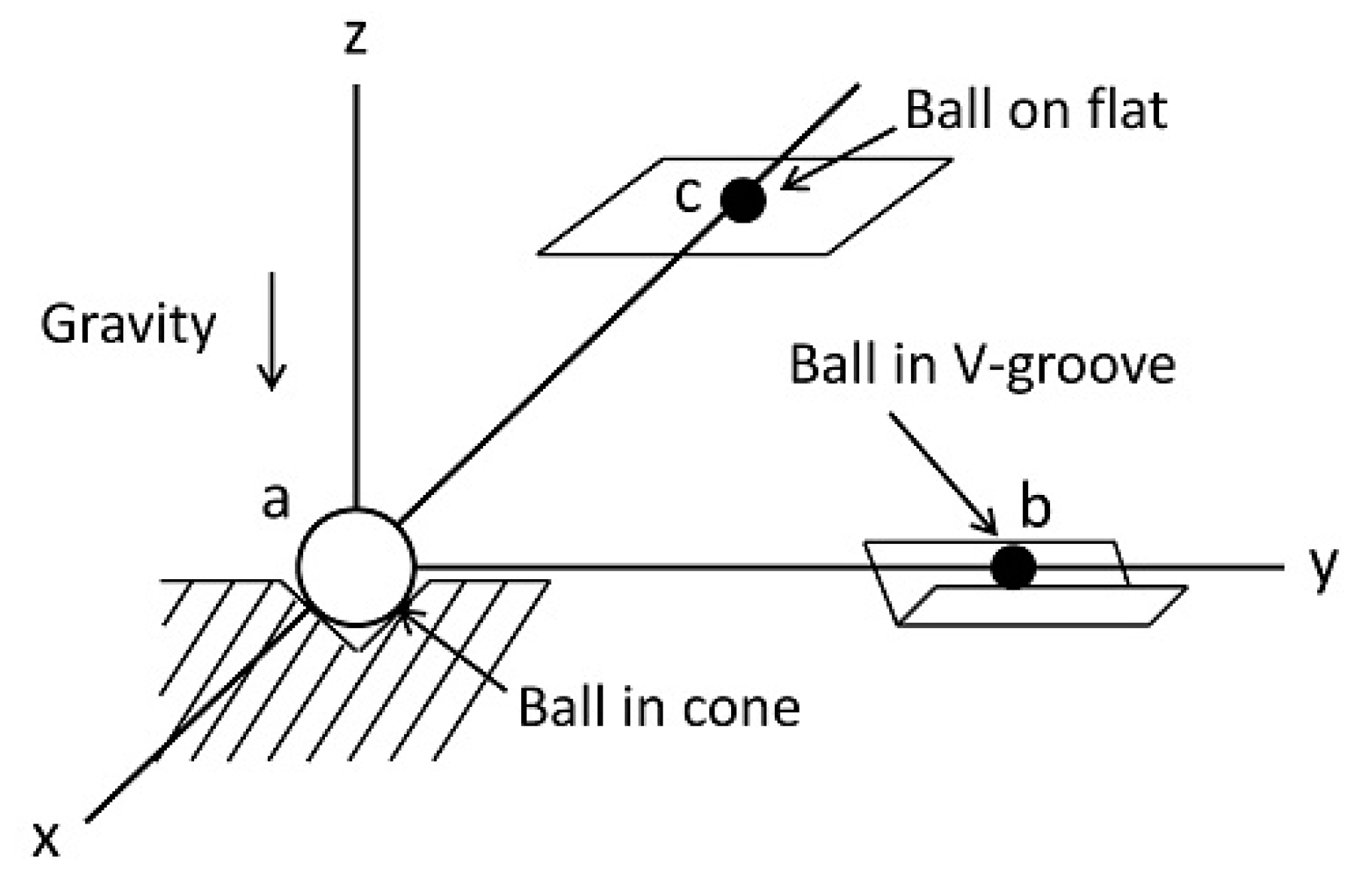
2.1. Principle of Kinematic Positioning
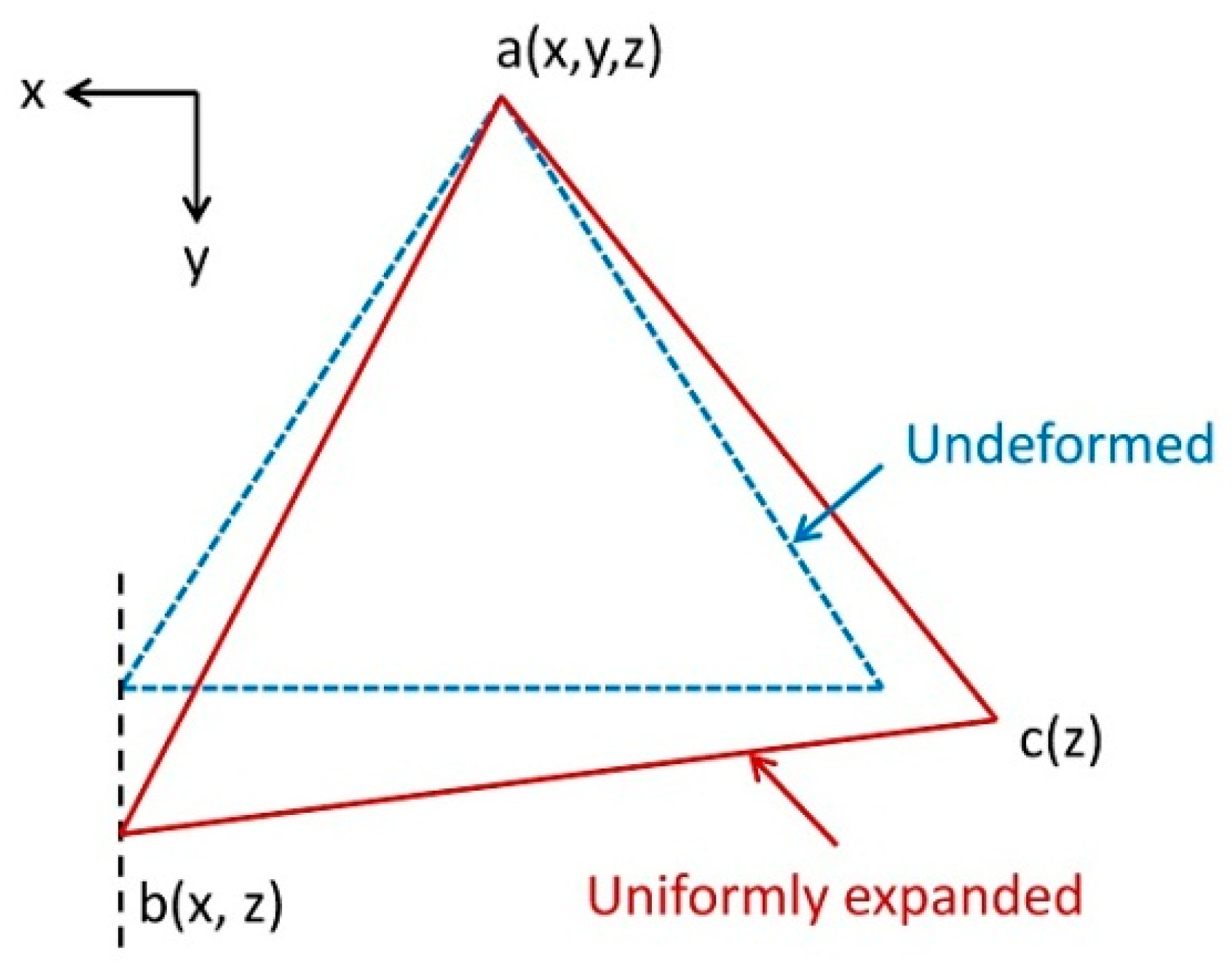
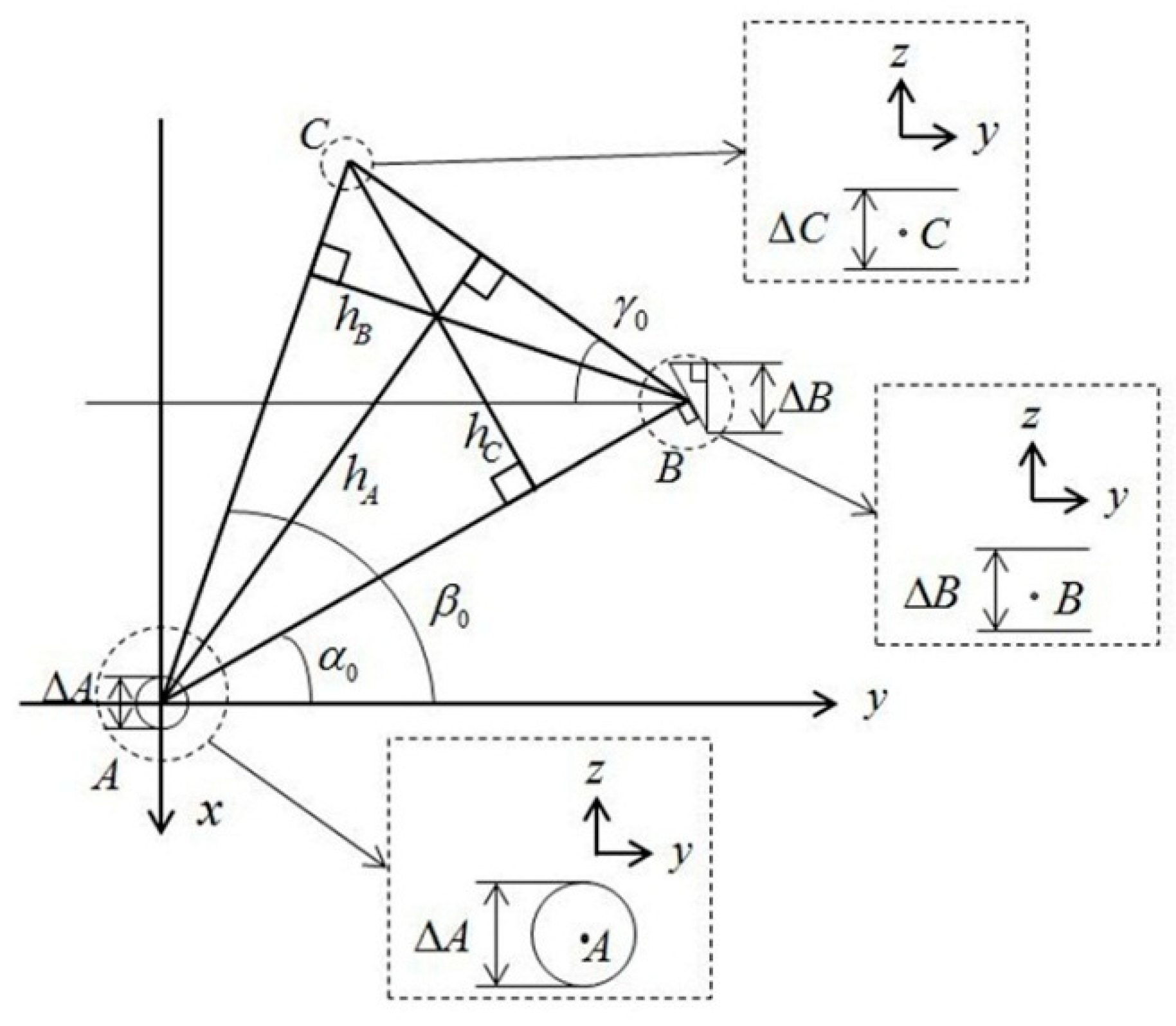
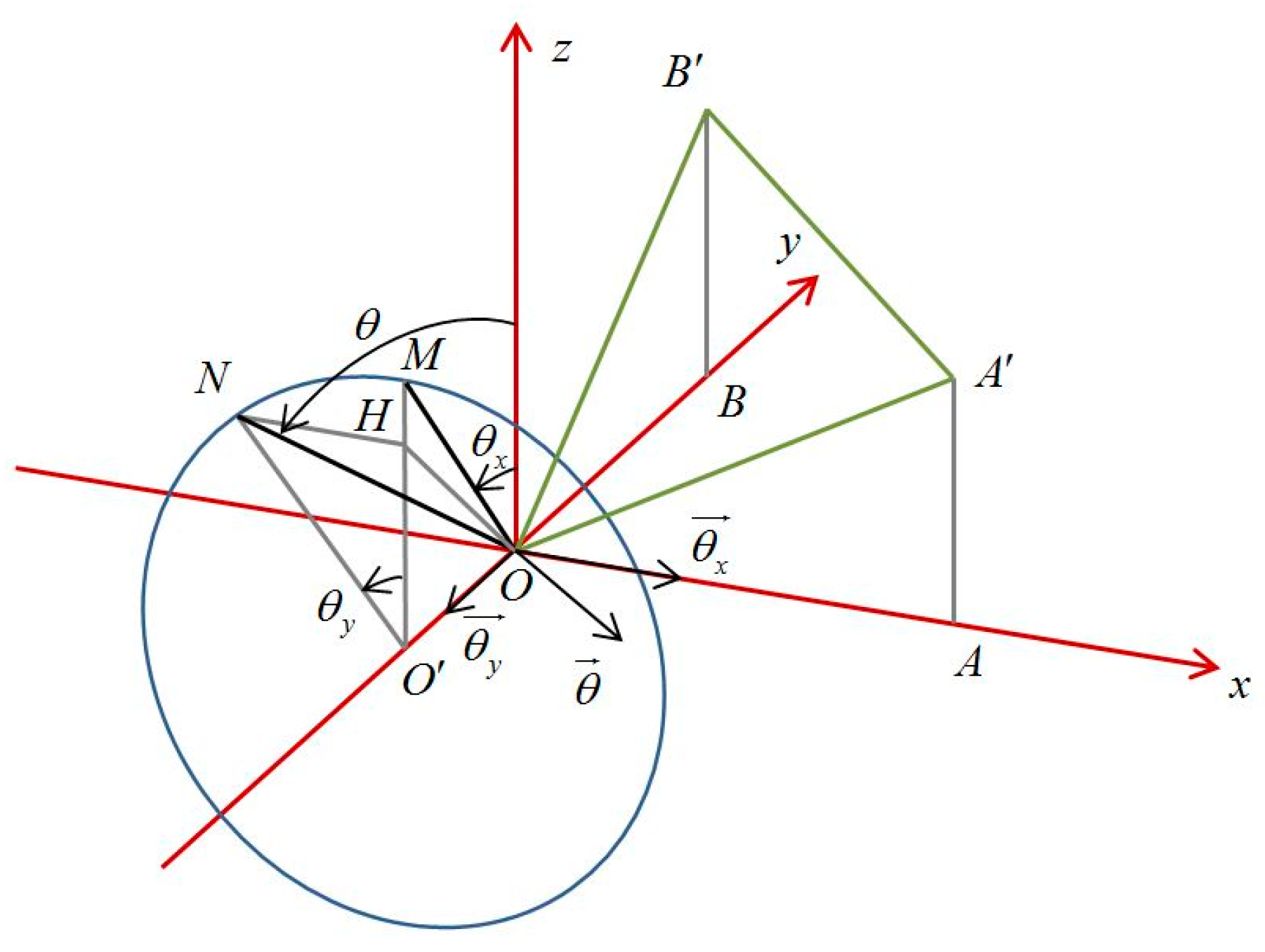
2.2. Mathematical Model of Rotation Angles
2.3. Design of Fit Clearance
3. Rotation Angle Measurement Principle and Error Analysis
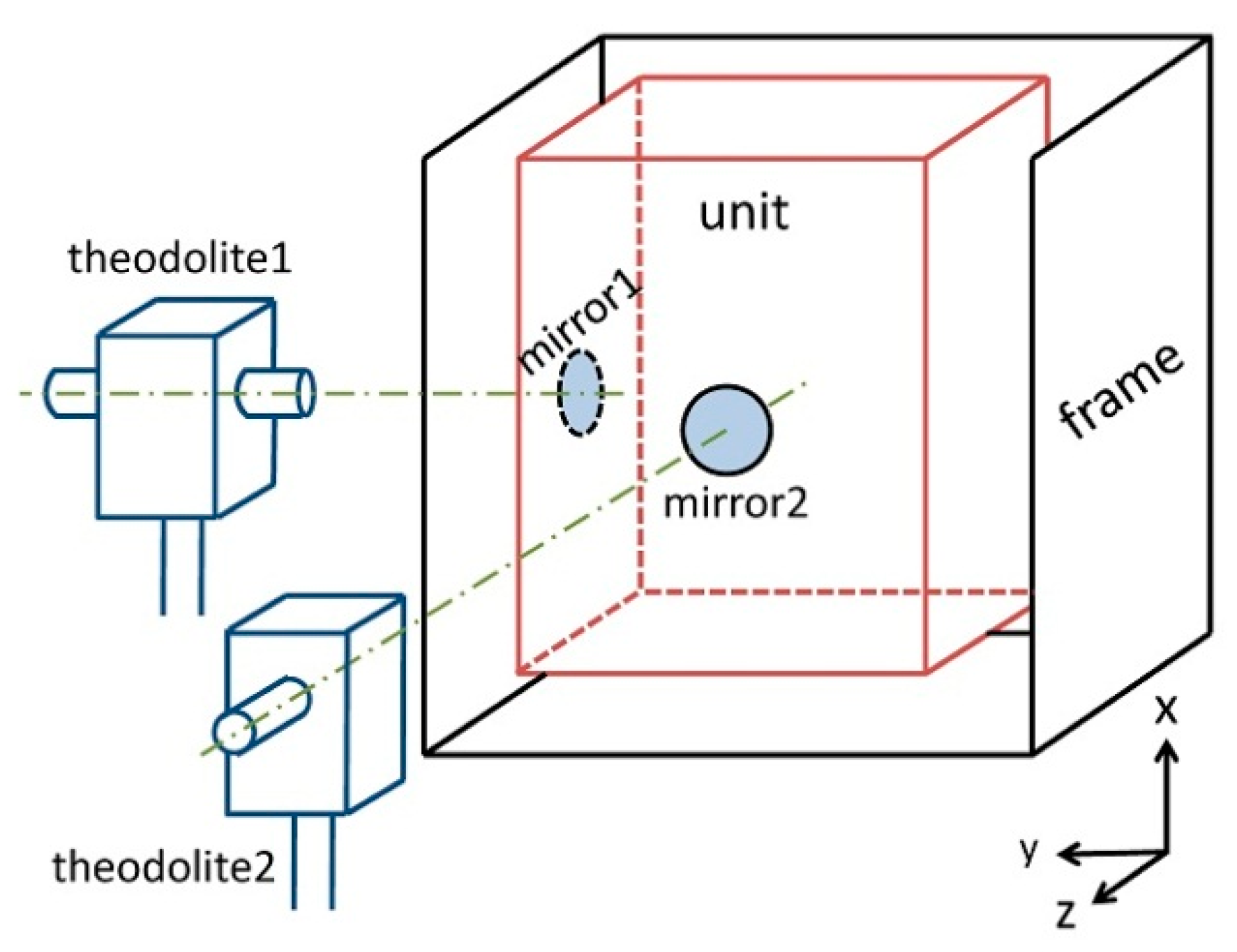
3.1. Rotation Angle Measurement Principle
3.2. Measurement Error Analysis
4. Experiment and Discussion
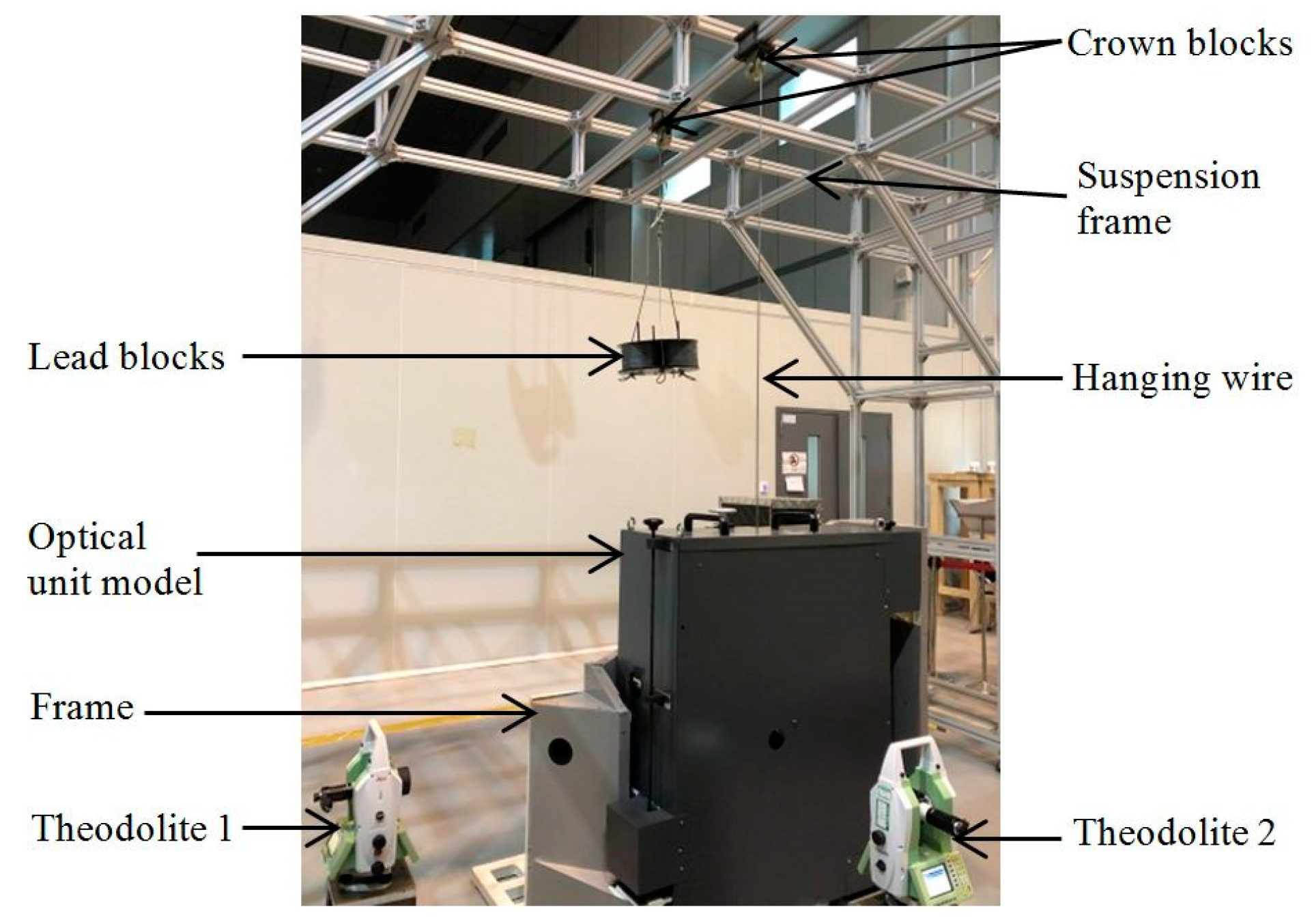
4.1. Experimental Settings
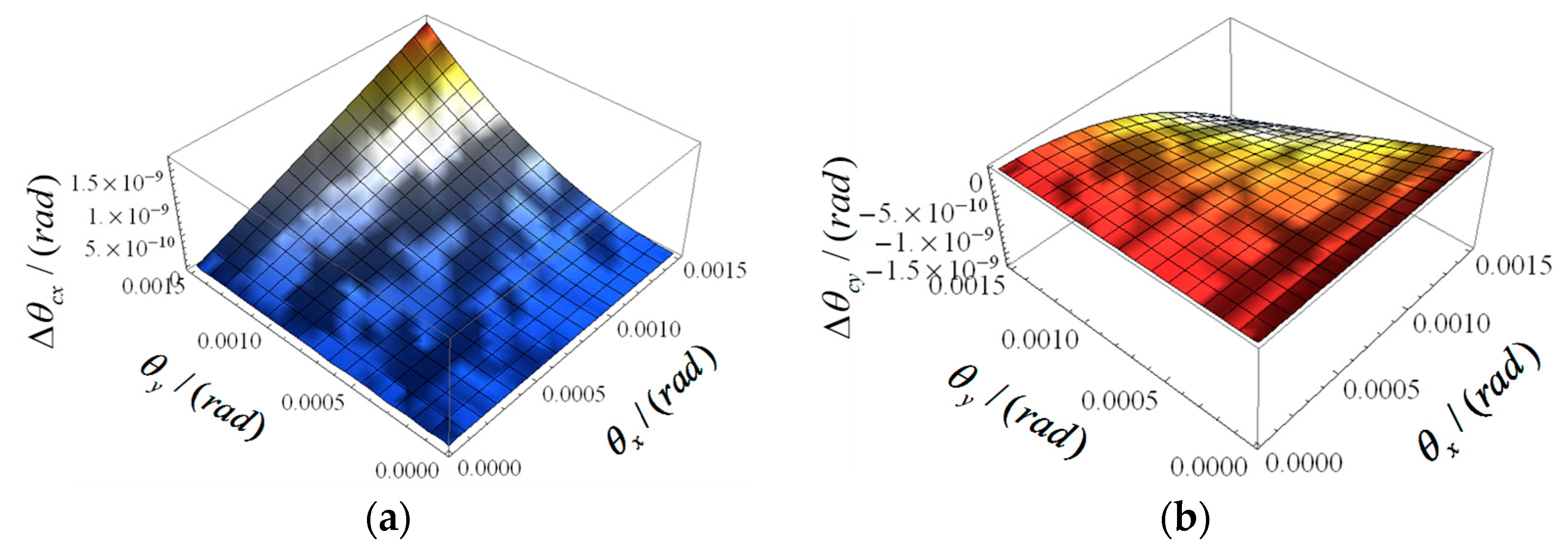
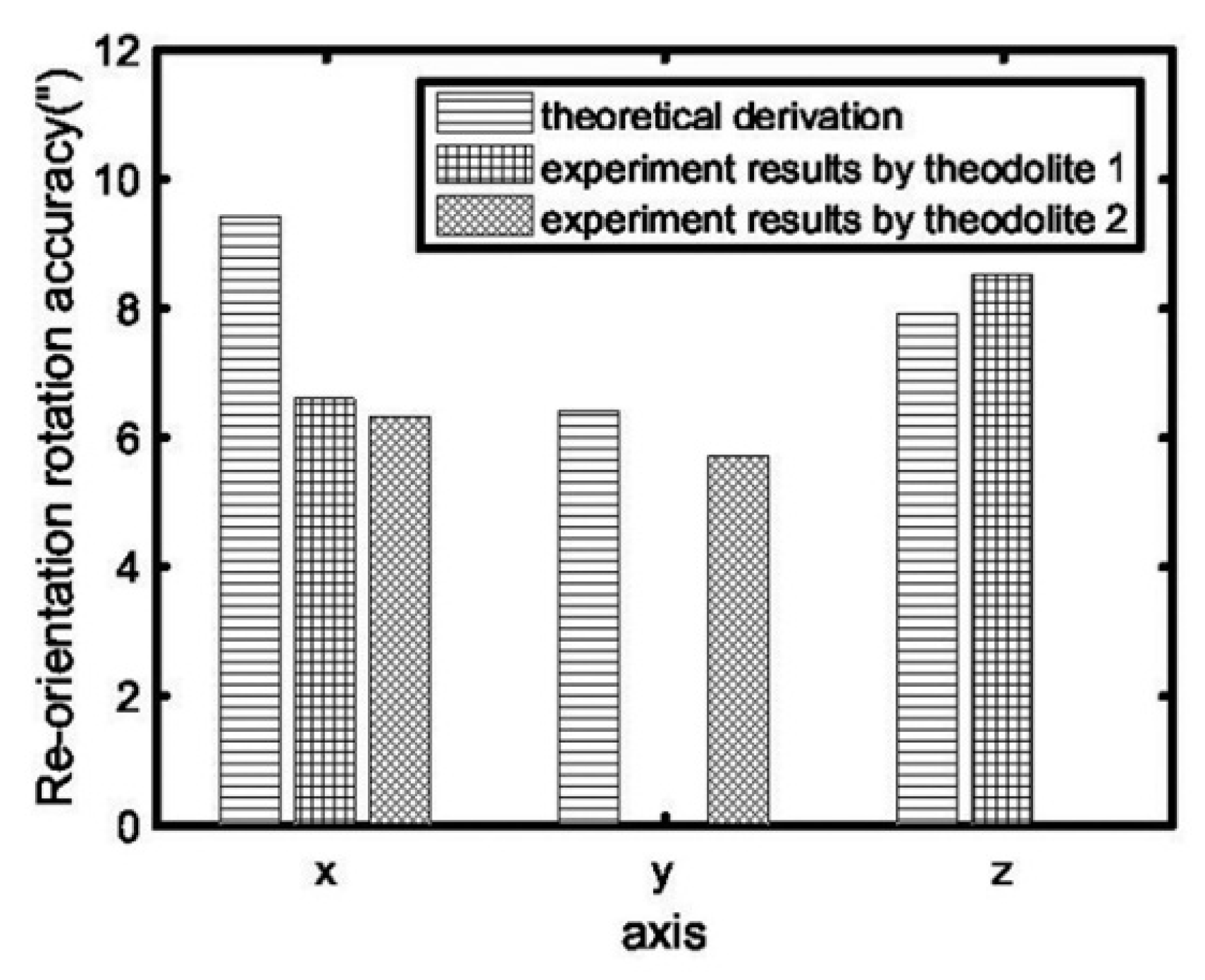
4.2. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Coleshill, E.; Oshinowo, L.; Rembala, R.; Bina, B.; Rey, D.; Sindelar, S. Dextre: Improving maintenance operations on the International Space Station. Acta Astronaut. 2009, 64, 869–874. [Google Scholar] [CrossRef]
- Joppin, C.; Hastings, D.E. On-orbit upgrade and repair: The Hubble Space Telescope example. J. Spacecr. Rocket. 2006, 43, 614–625. [Google Scholar]
- Leete, S.J. Design for on-orbit spacecraft servicing. In Proceedings of the 2001 Core Technologies for Space Conference, Colorado Springs, CO, USA, 28–30 November 2001. [Google Scholar]
- Shayler, D.J.; Harland, D.M. The Hubble Space Telescope: From Concept to Success; Springer: Berlin, Germany, 2015. [Google Scholar]
- Akin, D.; Roberts, B.; Pilotte, K.; Baker, M. Robotic augmentation of EVA for Hubble Space Telescope servicing. In Proceedings of the AIAA Space 2003 Conference & Exposition, Long Beach, CA, USA, 23–25 September 2003. [Google Scholar]
- King, D. Hubble robotic servicing: Stepping stone for future exploration missions. In Proceedings of the 1st Space Exploration Conference: Continuing the Voyage of Discovery, Orlando, FL, USA, 30 January–1 February 2005. [Google Scholar]
- Ji, Y.X. Conceptual Study of Spacecraft Replacement Unit for On-Orbit Servicing. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2016. [Google Scholar]
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Chen, X.; Yuan, J.; Yao, W. The Technology of On-Orbit Spacecraft Servicing; China Astronautic Publishing House: Beijing, China, 2009; pp. 1–22. [Google Scholar]
- Huang, B.; Liu, T.; Han, J.; Hu, H. Polarimetric target detection under uneven illumination. Opt. Express 2015, 23, 23603–23612. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Zhang, X.; Liu, T.; Shi, G.; Wang, L.; Li, Y. On-orbit polarization calibration for multichannel polarimetric camera. Appl. Sci. 2019, 9, 1424. [Google Scholar] [CrossRef]
- Liu, X.; Wang, F.; Zhang, M.; Cai, Y. Effects of atmospheric turbulence on lensless Ghost Imaging with partially coherent light. Appl. Sci. 2018, 8, 1479. [Google Scholar] [CrossRef]
- Zhu, J.; Sha, W.; Chen, C.; Zhang, X.; Ren, J. Frequency response of imaging quality by micro-vibration for large-aperture space-borne telescope. Opt. Precis. Eng. 2016, 24, 1118–1127. [Google Scholar]
- Yu, L.; Chen, J.; Xue, H.; Shen, Y. Hyper-spectral imaging sensor in UV-VIS-NIR region in air for costal ocean observation. Opt. Precis. Eng. 2018, 26, 2363–2370. [Google Scholar]
- Cao, H.; Li, B.; Li, Y.; Kang, T.; Chen, X. Model-based error motion prediction and fit clearance optimization for machine tool spindles. Mech. Syst. Signal Process. 2019, 133, 106252. [Google Scholar] [CrossRef]
- Leonov, O.A.; Shkaruba, N.Z. A parametric failure model for the calculation of the fit tolerance of joints with clearance. J. Frict. Wear 2019, 40, 332–336. [Google Scholar] [CrossRef]
- Wang, J.; Ning, K.; Tang, L.; Malekian, R.; Liang, Y.; Li, Z. Modeling and finite element analysis of load-carrying performance of a wind turbine considering the influence of assembly factors. Appl. Sci. 2017, 7, 298. [Google Scholar] [CrossRef]
- From, P.J.; Gravdahl, J.T.; Pettersen, K.Y. Rigid Body Dynamics; Springer: Berlin, Germany, 2014; pp. 132–133. [Google Scholar]
- Xiang, S. Dynamic Modeling and Contorl Analysis for Suspended Type Astronauts Low-Gravity Simulation System. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2015. [Google Scholar]
- Nicolau, E.; Poventud-Estrada, C.M.; Arroyo, L.; Fonseca, J.; Flynn, M.; Cabrera, C.R. Microgravity effects on the electrochemical oxidation of ammonia: A parabolic flight experiment. Electrochim. Acta 2012, 75, 88–93. [Google Scholar] [CrossRef]
- Belser, V.; Breuninger, J.; Reilly, M.; Laufer, R.; Dropmann, M.; Herdrich, G.; Hyde, T.; Röser, H.-P.; Fasoulas, S. Aerodynamic and engineering design of a 1.5 s high quality microgravity drop tower facility. Acta Astronaut. 2016, 129, 335–344. [Google Scholar] [CrossRef]
- Newman, D.J.; Alexander, H.L. Human locomotion and workload for simulated lunar and Martian environments. Acta Astronaut. 1993, 29, 613–620. [Google Scholar] [CrossRef]
- Ma, H.; Wang, J. Instrument Accuracy Theory; Beihang University Press: Beijing, China, 2014; pp. 50–51. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Azimuth Angle of Theodolite1 (Relating to the Rotation Angle Around the x-Axis of the Model) | Azimuth Angle of Theodolite2 (Relating to the Rotation Angle Around the x-Axis of the Model) | Pitch Angle of Theodolite2 (Relating to the Rotation Angle Around the y-Axis of the Model) | Pitch Angle of Theodolite1 (Relating to the Rotation Angle Around the z-Axis of the Model) | |
|---|---|---|---|---|
| Test Results (″) | Test Results (″) | Test Results (″) | Test Results (″) | |
| 1 | −22.3 | −51.2 | 12.8 | 3.3 |
| 2 | −24.2 | −56.2 | 13.1 | 7.7 |
| 3 | −26.4 | −54.4 | 11.6 | 8.4 |
| 4 | −18.4 | −52.8 | 13.0 | 8.5 |
| 5 | −20.9 | −49.5 | 13.3 | 4.3 |
| 6 | −21.2 | −52.2 | 9.0 | 4.4 |
| 7 | −22.3 | −54.0 | 10.1 | 12.5 |
| 8 | −24.8 | −56.5 | 7.2 | 3.8 |
| 9 | −22.0 | −52.3 | 11.0 | 8.9 |
| 10 | −21.7 | −52.1 | 10.4 | 8.7 |
| Re-orientation error (-confidence interval) | 6.4 | 6.2 | 5.7 | 8.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Yang, L.; Zhao, W.; Shi, Z.; Liu, Z. Design of Positioning Mechanism Fit Clearances Based on On-Orbit Re-Orientation Accuracy. Appl. Sci. 2019, 9, 4712. https://doi.org/10.3390/app9214712
Li Q, Yang L, Zhao W, Shi Z, Liu Z. Design of Positioning Mechanism Fit Clearances Based on On-Orbit Re-Orientation Accuracy. Applied Sciences. 2019; 9(21):4712. https://doi.org/10.3390/app9214712
Chicago/Turabian StyleLi, Qingya, Libao Yang, Weiguo Zhao, Zhen Shi, and Zhenyu Liu. 2019. "Design of Positioning Mechanism Fit Clearances Based on On-Orbit Re-Orientation Accuracy" Applied Sciences 9, no. 21: 4712. https://doi.org/10.3390/app9214712
APA StyleLi, Q., Yang, L., Zhao, W., Shi, Z., & Liu, Z. (2019). Design of Positioning Mechanism Fit Clearances Based on On-Orbit Re-Orientation Accuracy. Applied Sciences, 9(21), 4712. https://doi.org/10.3390/app9214712