A High Signal–Noise Ratio UWB Radar for Buried Pipe Location Using Golay Complementary Sequences


Abstract
:1. Introduction
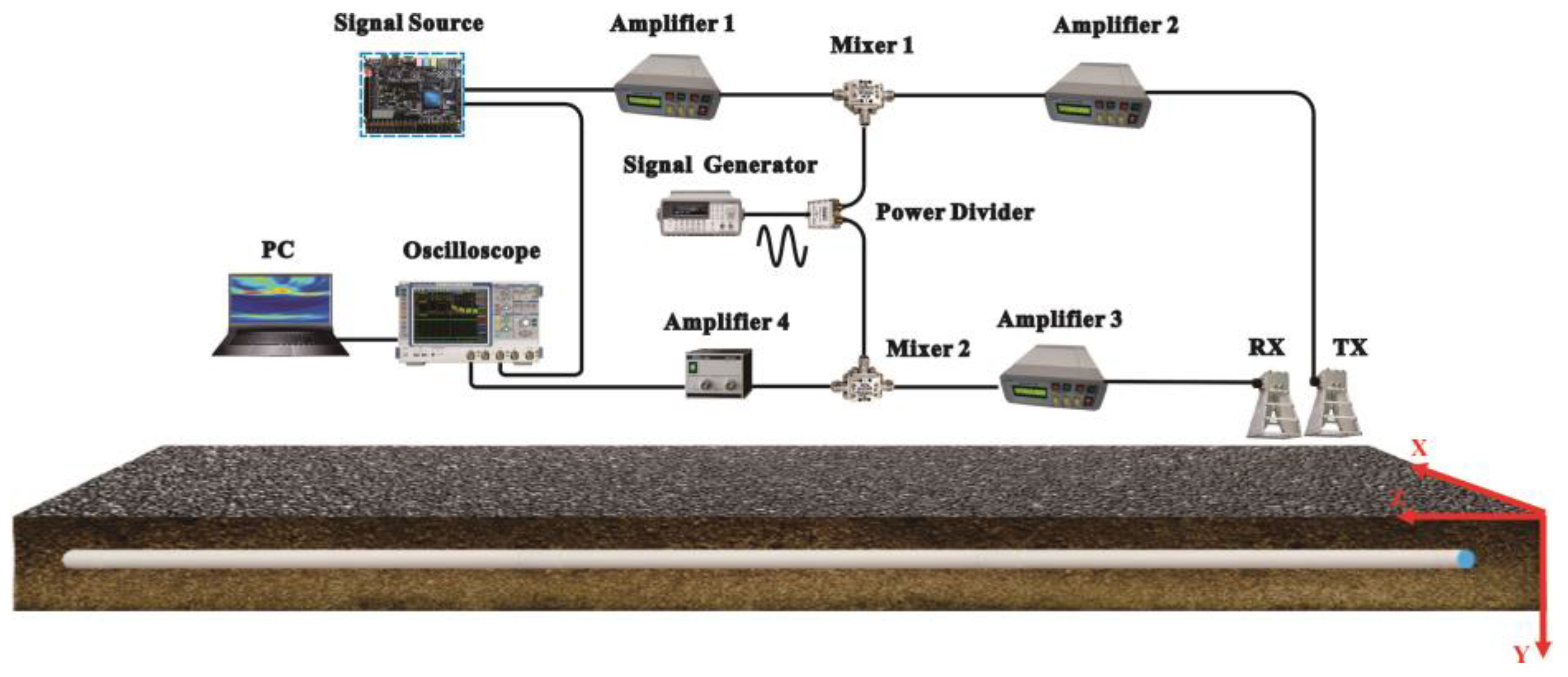
2. Radar System and Measurement Principle
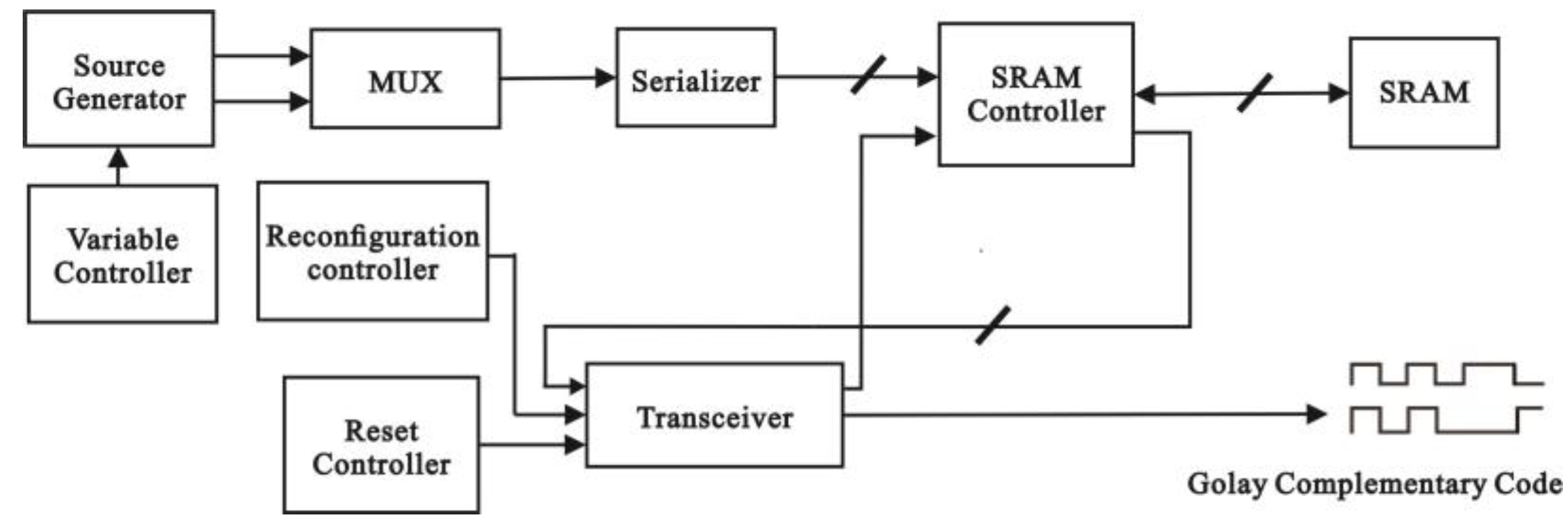
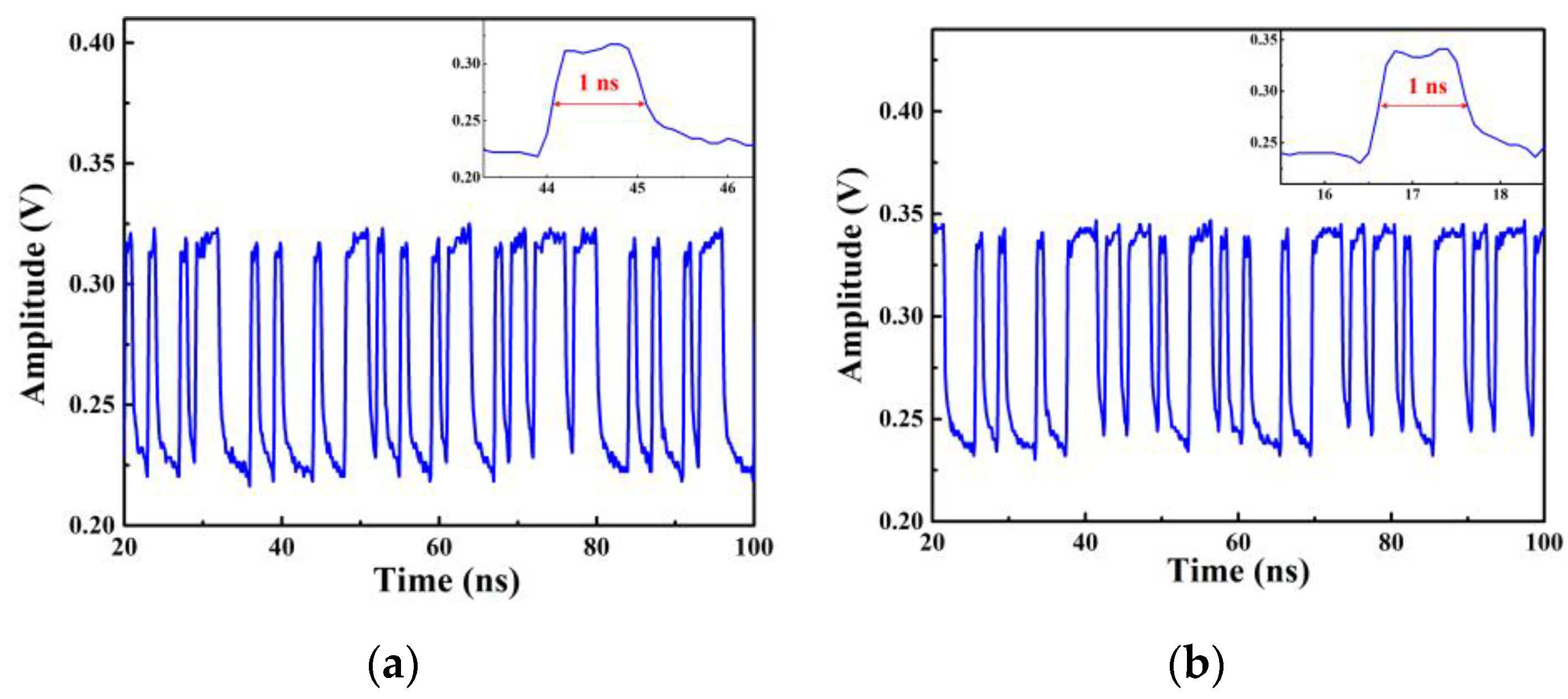
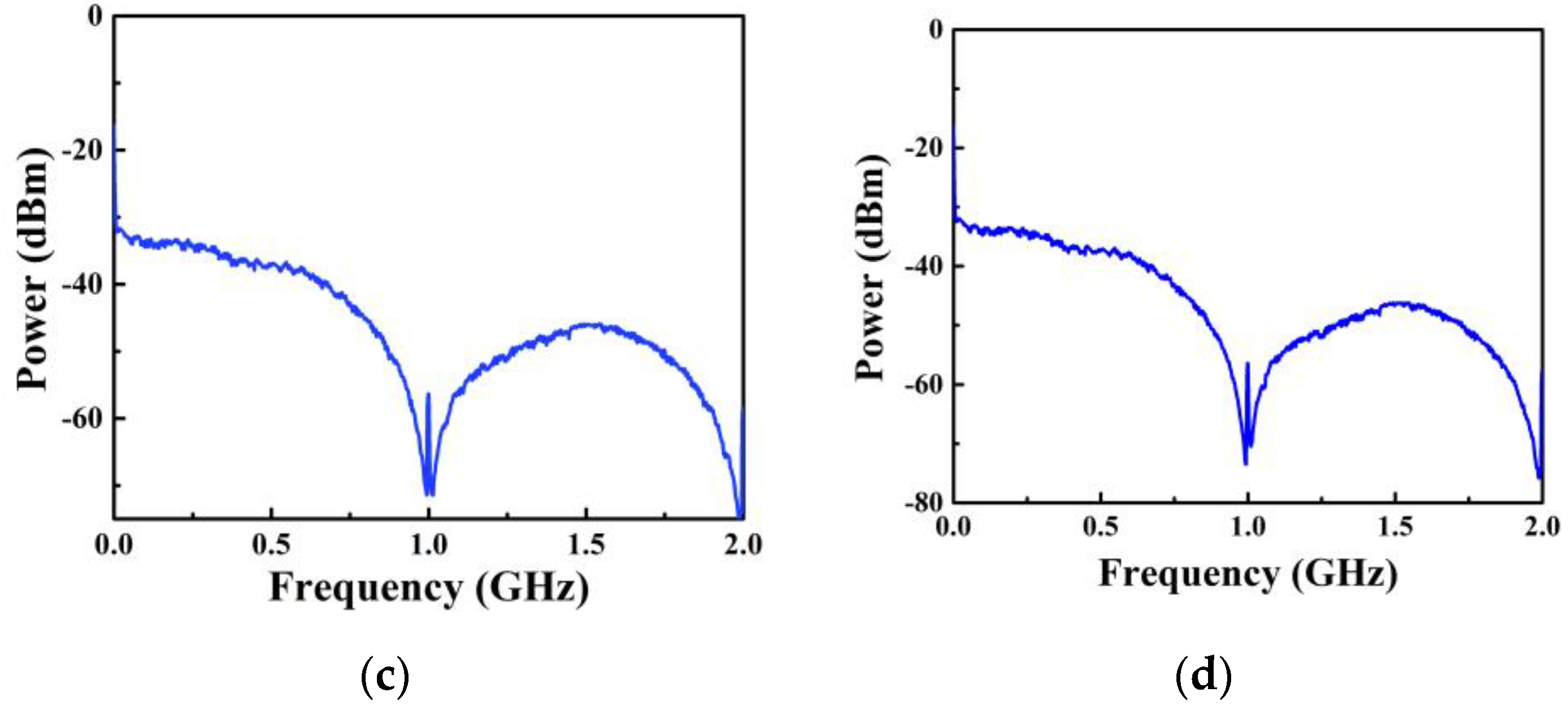
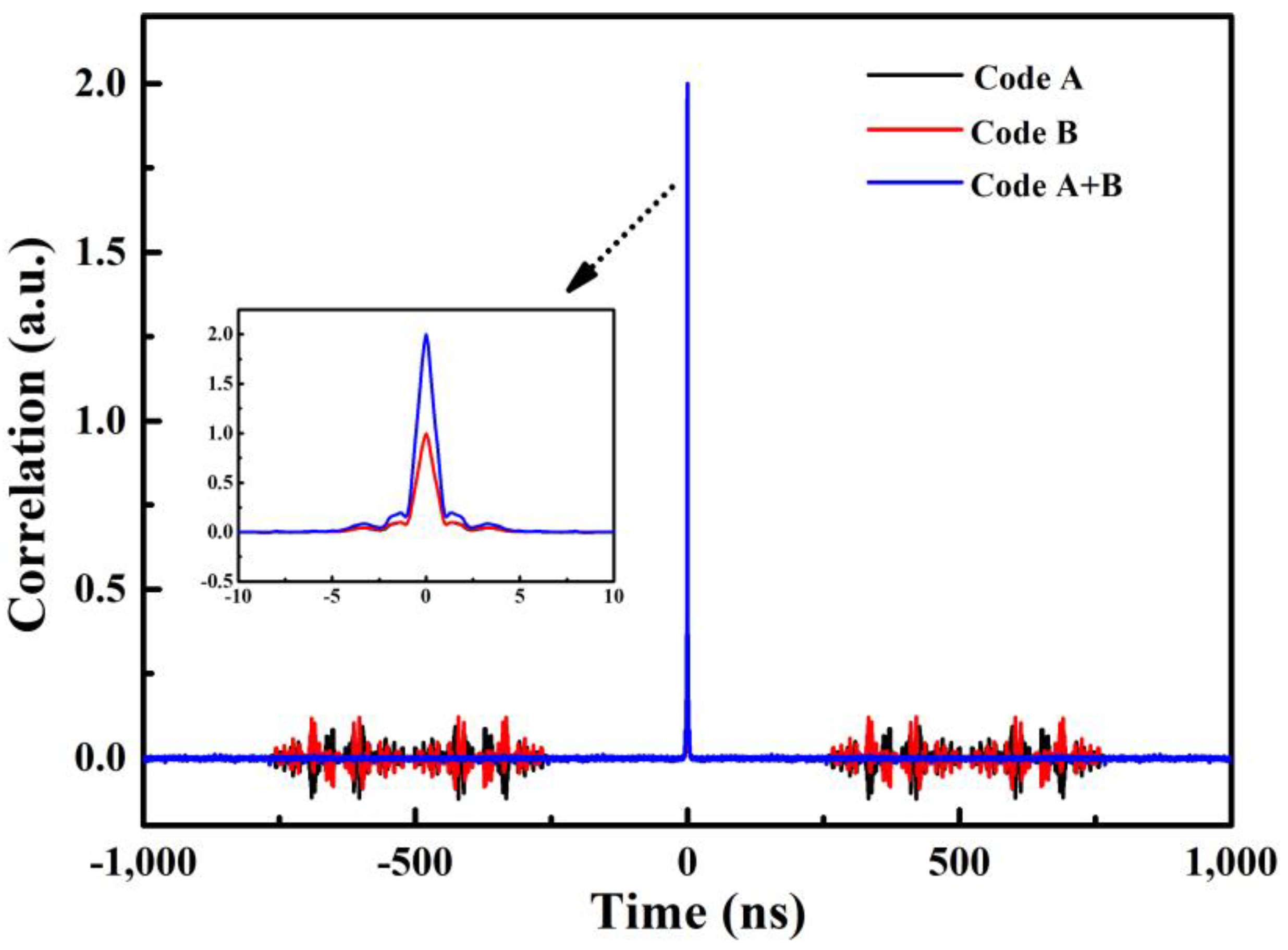
3. Generation and Characteristics of the Probe Signal
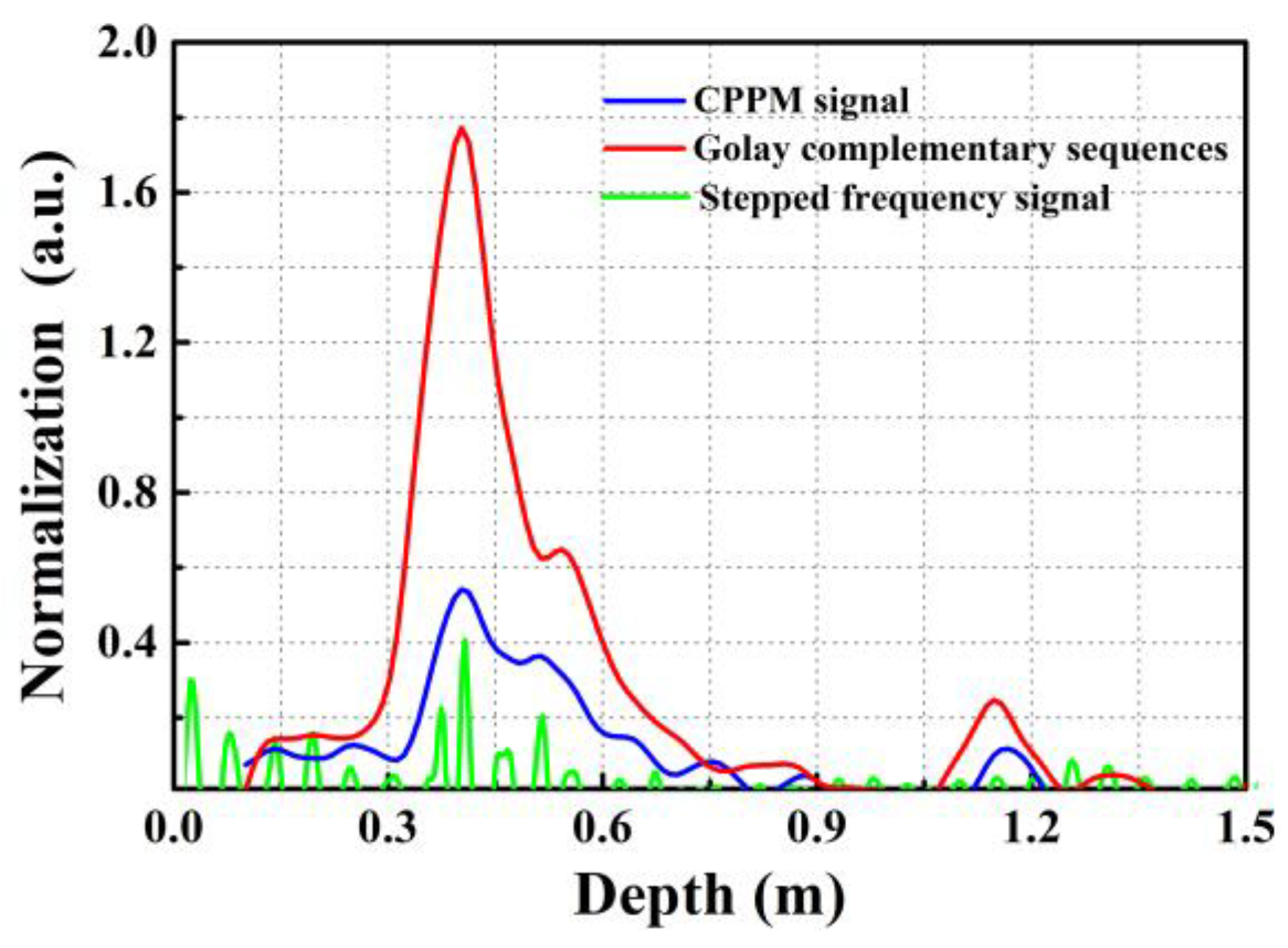
4. Experimental Results
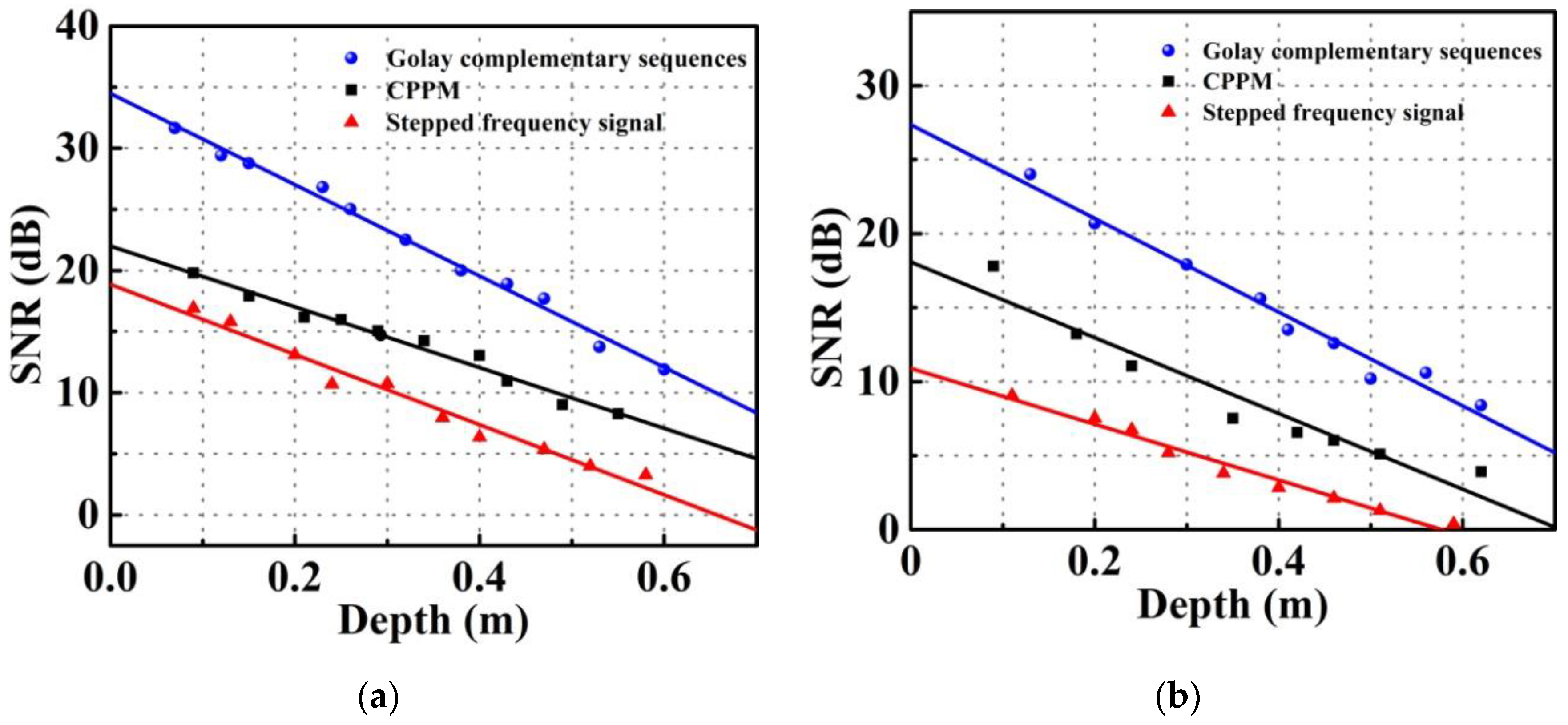
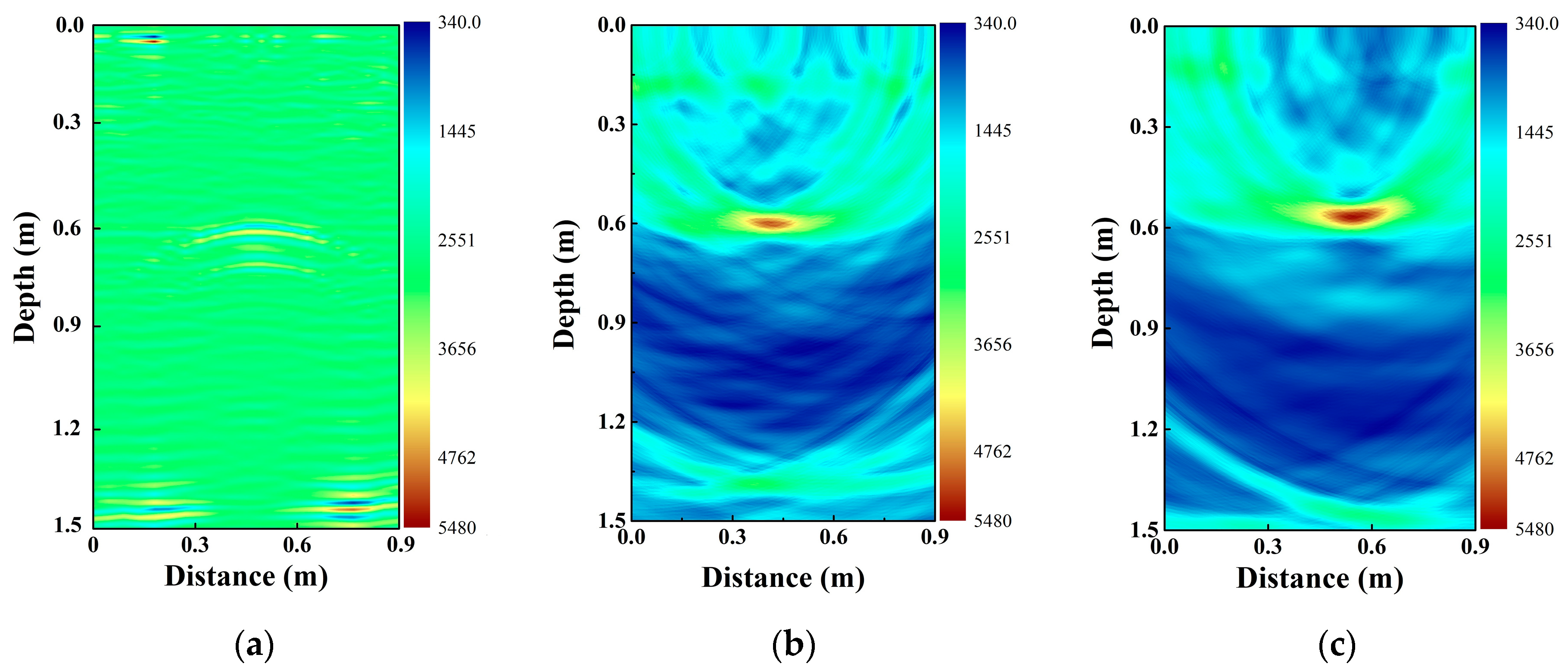
5. Detection Performance
6. Discussions and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brunzell, H. Detection of shallowly buried objects using impulse radar. IEEE Trans. Geosci. Remote Sens. 1999, 37, 875–886. [Google Scholar] [CrossRef]
- Agrawal, S.; George, N.V.; Prashant, A. GPR data analysis of weak signals using modified s-transform. Geotech. Geol. Eng. 2015, 33, 1167–1182. [Google Scholar] [CrossRef]
- Huuskonen-Snicker, E.; Mikhnev, V.A.; Olkkonen, M.K. Discrimination of buried objects in impulse GPR using phase retrieval technique. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1001–1007. [Google Scholar] [CrossRef]
- Rifai, D.; Abdalla, A.; Razali, R.; Ali, K.; Faraj, M. An eddy current testing platform system for pipe defect inspection based on an optimized eddy current technique probe design. Sensors 2017, 17, 579. [Google Scholar] [CrossRef] [PubMed]
- Saha, S.; Mukhopadhyay, S.; Mahapatra, U.; Bhattacharya, S.; Srivastava, G.P. Empirical structure for characterizing metal loss defects from radial magnetic flux leakage signal. Ndt E Int. 2010, 43, 507–512. [Google Scholar] [CrossRef]
- Xue, Q.; Leung, H.; Huang, L.; Zhang, R.; Liu, B.; Wang, J.; Li, L. Modeling of torsional oscillation of drillstring dynamics. Nonlinear Dyn. 2019, 96, 267–283. [Google Scholar] [CrossRef]
- Choi, M.; Kang, K.; Park, J.; Kim, W.; Kim, K. Quantitative determination of a subsurface defect of reference specimen by lock-in infrared thermography. Ndt E Int. 2008, 41, 119–124. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. On the selection of acoustic/vibration sensors for leak detection in plastic water pipes. J. Sound Vib. 2005, 283, 927–941. [Google Scholar] [CrossRef]
- Detlefsen, J.; Dallinger, A.; Schelkshorn, S.; Bertl, S. UWB millimeter-wave FMCW radar using hubert transform methods. In Proceedings of the 2006 IEEE Ninth International Symposium on Spread Spectrum Techniques and Applications, Manaus Amazon, Brazil, 28–31 August 2006; pp. 46–48. [Google Scholar]
- Gierlich, R.; Huettner, J.; Ziroff, A.; Weigel, R.; Huemer, M. A reconfigurable MIMO system for high-precision FMCW local positioning. IEEE Trans. Microw. Theory Tech. 2011, 59, 3228–3238. [Google Scholar] [CrossRef]
- Lee, H.; Kim, B.H.; Park, J.K.; Yook, J.G. A Novel Vital-Sign sensing algorithm for multiple subjects based on 24-GHz FMCW doppler radar. Remote Sens. 2019, 11, 1237. [Google Scholar] [CrossRef]
- Wu, Y.; Shen, F.; Yuan, Y.; Xu, D. An Improved modified universal ultra-wideband antenna designed for step frequency continuous wave ground penetrating radar system. Sensors 2019, 19, 1045. [Google Scholar] [CrossRef] [PubMed]
- Phelan, B.R.; Ranney, K.I.; Gallagher, K.A.; Clark, J.T.; Sherbondy, K.D.; Narayanan, R.M. Design of ultrawideband stepped-frequency radar for imaging of obscured targets. IEEE Sens. J. 2017, 17, 4435–4446. [Google Scholar] [CrossRef]
- Wang, H.; Dang, V.; Ren, L.; Liu, Q.; Ren, L.; Mao, E.; Kilik, O.; Fathy, A.E. An elegant solution: An alternative ultra-wideband transceiver based on stepped-frequency continuous-wave operation and compressive sensing. IEEE Microw. Mag. 2016, 17, 53–63. [Google Scholar] [CrossRef]
- Liu, X.; Yan, K.; Chen, Z.; Li, C.; Zhang, J.; Ye, S.; Fang, G. A m-sequence UWB radar system design and contrast test with an impulse radar. In Proceedings of the 2018 IEEE 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Sachs, J.; Herrmann, R. M-sequence-based ultra-wideband sensor network for vitality monitoring of elders at home. IET RadarSonar Navig. 2015, 9, 125–137. [Google Scholar] [CrossRef]
- Xia, Z.; Fang, G.; Ye, S.; Zhang, Q.; Chen, C.; Yin, H. A novel handheld pseudo random coded UWB radar for human sensing applications. IEICE Electron. Express 2014, 11, 20140981. [Google Scholar] [CrossRef]
- Lin, F.Y.; Liu, J.M. Chaotic radar using nonlinear laser dynamics. IEEE J. Quantum Electron. 2004, 4I0, 815–820. [Google Scholar] [CrossRef]
- Shi, Z.G.; Qiao, S.; Chen, K.S.; Cui, W.Z.; Ma, W.; Jiang, T.; Ran, L.X. Ambiguity functions of direct chaotic radar employing microwave chaotic Colpitts oscillator. Prog. Electromagn. Res. 2007, 77, 1–14. [Google Scholar] [CrossRef]
- Esmaeili-Najafabadi, H.; Ataei, M.; Sabahi, M.F. Designing sequence with minimum PSL using Chebyshev distance and its application for chaotic MIMO radar waveform design. IEEE Trans. Signal Process. 2016, 65, 690–704. [Google Scholar] [CrossRef]
- Levanon, N.; Scharf, A. Range sidelobes blanking by comparing outputs of contrasting mismatched filters. IET RadarSonar Navig. 2009, 3, 265–277. [Google Scholar] [CrossRef]
- Cooper, K.B.; Durden, S.L.; Cochrane, C.J.; Monje, R.R.; Dengler, R.J.; Baldi, C. Using FMCW doppler radar to detect targets up to the maximum unambiguous range. IEEE Geosci. Remote Sens. Lett. 2017, 14, 339–343. [Google Scholar] [CrossRef]
- Yan, J.B.; Alvestegui, D.G.G.; McDaniel, J.W.; Li, Y.; Gogineni, S.; Rodriguez-Morales, F.; Brozena, J.; Leuschen, C.J. Ultrawideband FMCW radar for airborne measurements of snow over sea ice and land. IEEE Trans. Geosci. Remote Sens. 2016, 55, 834–843. [Google Scholar] [CrossRef]
- Hitzler, M.; Saulig, S.; Boehm, L.; Mayer, W.; Winkler, W.; Uddin, N.; Waldschmidt, C. Ultracompact 160-GHz FMCW radar MMIC with fully integrated offset synthesizer. IEEE Trans. Microw. Theory Tech. 2017, 65, 1682–1691. [Google Scholar] [CrossRef]
- Collins, T.; Atkins, P. Nonlinear frequency modulation chirps for active sonar. IEEE Proc. Radar Sonar Navig. 1999, 146, 312–316. [Google Scholar] [CrossRef]
- Hewitt, A.; Vilar, E. Selective fading on LOS microwave links: Classical and spread-spectrum measurement techniques. IEEE Trans. Commun. 1988, 36, 789–796. [Google Scholar] [CrossRef]
- Arai, I.; Tomizawa, Y.; Hirose, M. Pulse compression subsurface radar. IEICE Trans. Commun. 2000, 83, 1930–1937. [Google Scholar]
- Venkatasubramanian, V.; Leung, H.; Liu, X. Chaos UWB radar for through-the-wall imaging. IEEE Trans. Image Process. 2009, 18, 1255–1265. [Google Scholar] [CrossRef]
- Zhang, M.; Ji, Y.; Zhang, Y.; Wu, Y.; Xu, H.; Xu, W. Remote radar based on chaos generation and radio over fiber. IEEE Photonics J. 2014, 6, 1–12. [Google Scholar]
- Liu, L.; Guo, C.; Li, J.; Xu, H.; Zhang, J.; Wang, B. Simultaneous life detection and localization using a wideband chaotic signal with an embedded tone. Sensors 2016, 16, 1866. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, T.; Wang, H. Improvement of signal-to-noise ratio in chaotic laser radar based on algorithm implementation. Chin. Opt. Lett. 2012, 10, 052801. [Google Scholar] [CrossRef]
- Budišin, S.Z. Efficient pulse compressor for Golay complementary sequences. Electron. Lett. 1991, 27, 219–220. [Google Scholar] [CrossRef]
- Pace, P.E.; Ng, C.Y. Costas CW frequency hopping radar waveform: Peak sidelobe improvement using Golay complementary sequences. Electron. Lett. 2010, 46, 169–170. [Google Scholar] [CrossRef]
- Alejos, A.V.; Dawood, M.; Mohammed, H.U.R. Ground penetration radar using golay sequences. In Proceedings of the 2007 IEEE Region 5 Technical Conference, Fayetteville, AR, USA, 20–22 April 2007; pp. 318–321. [Google Scholar]
- Alejos, A.V.; Dawood, M.; Mohammed, H.U.R.; Sanchez, M.G.; Jedlicka, R.P.; Cuinas, I. Low sidelobe level radar techniques using Golay based coded sequences. In Proceedings of the 2008 IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–11 July 2008; pp. 1–4. [Google Scholar]
- Alejos, A.V.; Dawood, M.; Mohammed, H.U.R. Estimation of sidelobe level variations of phased codes in presence of random interference for bistatic wideband noise radar. Int. J. Antennas Propag. 2015, 2015, 11. [Google Scholar] [CrossRef]
- Alejos, A.V.; Dawood, M.; Sanchez, M.G.; Mohammed, H.U.R.; Jedlicka, R.P.; Cuinas, I. Design and implementation of a Golay-based GPR system for improved subsurface imaging. In Proceedings of the 2007 IEEE Antennas and Propagation Society International Symposium, Honolulu, HI, USA, 9–15 June 2007; pp. 597–600. [Google Scholar]
- Alejos, A.V.; Dawood, M.; Mohammed, H.U.R. Design and implementation of Ground Peneration Radar system using coded Sequences and improved target detection using Golay codes. In Proceedings of the 2008 IEEE Region 5 Conference, Kansas City, MO, USA, 17–20 April 2008; pp. 1–3. [Google Scholar]
- Xia, Z.; Zhang, Q.; Ye, S.; Wang, Y.; Chen, C.; Yin, H.; Fang, G. A novel low-frequency coded ground penetrating radar for deep detection. IEICE Electron. Express 2015, 12. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Wang, B.; Zhang, J.; Liu, L.; Wang, Y.; Wang, A. Chaos through-wall imaging radar. Sens. Imaging 2017, 18, 6. [Google Scholar] [CrossRef]
- Fortuna, L.; Frasca, M.; Rizzo, A. Chaos preservation through continuous chaotic pulse position modulation. In Proceedings of the 2001 IEEE International Symposium on Circuits and Systems, Sydney, NSW, Australia, 6–9 May 2001; pp. 803–806. [Google Scholar]
- Li, J.; Guo, T.; Leung, H.; Xu, H.; Liu, L.; Wang, B.; Liu, Y. Locating Underground pipe using wideband chaotic ground penetrating radar. Sensors 2019, 19, 2913. [Google Scholar] [CrossRef] [Green Version]
- Moser, M.S. Bathymetric Uncertainty Model for the L-3 Klein 5410 Sidescan Sonar. Ph.D. Thesis, University of New Hampshire, Durham, UK, 2009. [Google Scholar]
- Dawood, M.; Li, K. Detection of Brillouin precursors at microwave frequencies through a rectangular waveguide filled with wet soil. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1065–1069. [Google Scholar] [CrossRef]
- Alejos, A.V. Understanding the design of anti-dispersive filtering for propagation of UWB microwave signals in dispersive soils. IEEE Geosci. Remote Sens. Lett. 2013, 11, 14–18. [Google Scholar] [CrossRef]
- Alejos, A.V.; Dawood, M. Propagation model for subsurface and through-wall imaging applications under the frequency dispersion perspective. Int. J. Antennas Propag. 2013, 2013, 9. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipes | Material | Diameter (m) | Length (m) | Thickness (mm) |
|---|---|---|---|---|
| P1 | Plastic | 0. 20 | 0.52 | 3 |
| P2 | Plastic | 0.15 | 0.60 | 4 |
| M1 | Metallic | 0.10 | 0.60 | 2 |
| M2 | Metallic | 0.05 | 0.35 | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Liu, Y.; Xu, H.; Wang, B.; Liu, L.; Chen, X. A High Signal–Noise Ratio UWB Radar for Buried Pipe Location Using Golay Complementary Sequences. Appl. Sci. 2019, 9, 5090. https://doi.org/10.3390/app9235090
Li J, Liu Y, Xu H, Wang B, Liu L, Chen X. A High Signal–Noise Ratio UWB Radar for Buried Pipe Location Using Golay Complementary Sequences. Applied Sciences. 2019; 9(23):5090. https://doi.org/10.3390/app9235090
Chicago/Turabian StyleLi, Jingxia, Yang Liu, Hang Xu, Bingjie Wang, Li Liu, and Xinpeng Chen. 2019. "A High Signal–Noise Ratio UWB Radar for Buried Pipe Location Using Golay Complementary Sequences" Applied Sciences 9, no. 23: 5090. https://doi.org/10.3390/app9235090