Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer



Abstract
:1. Introduction
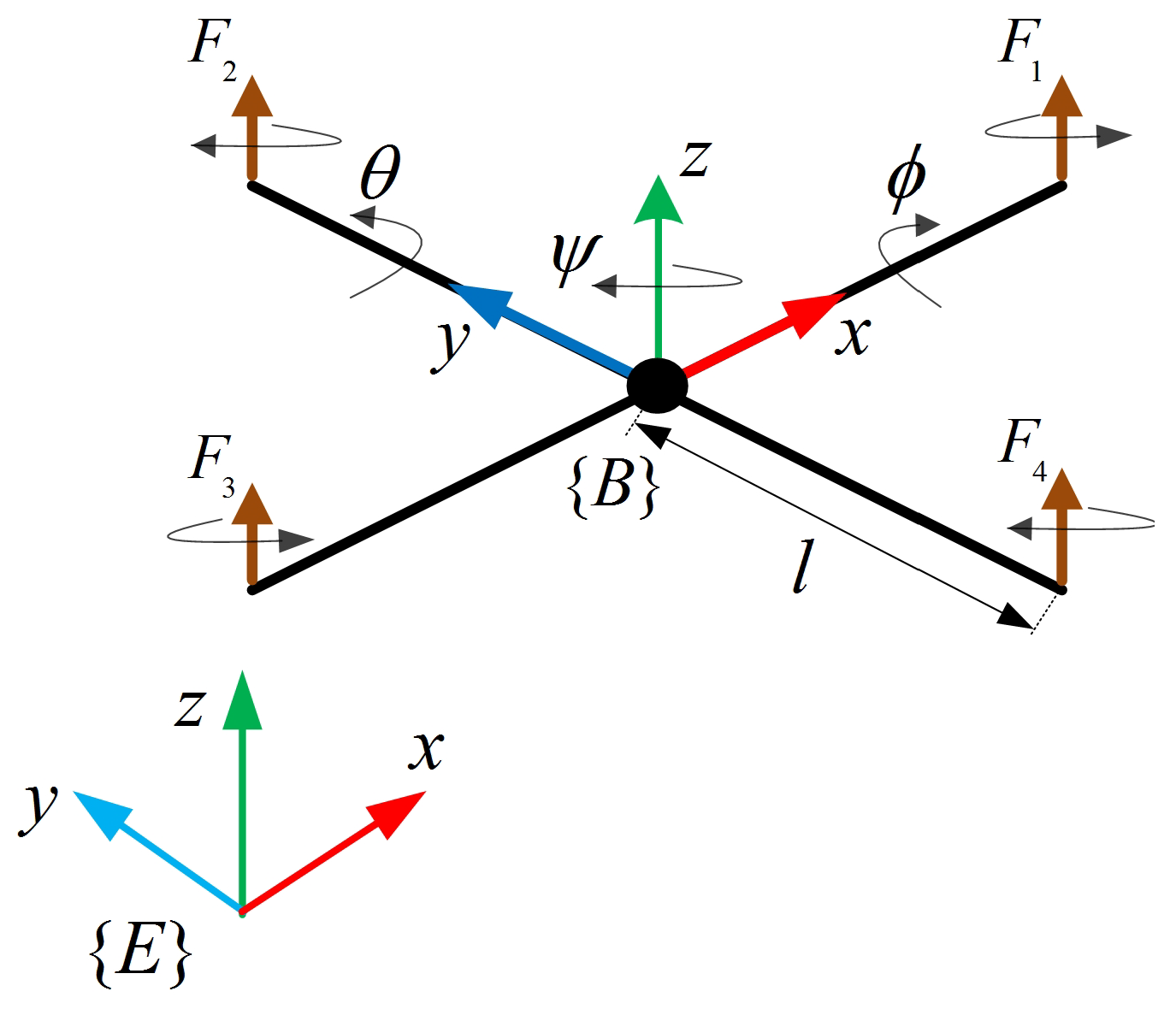
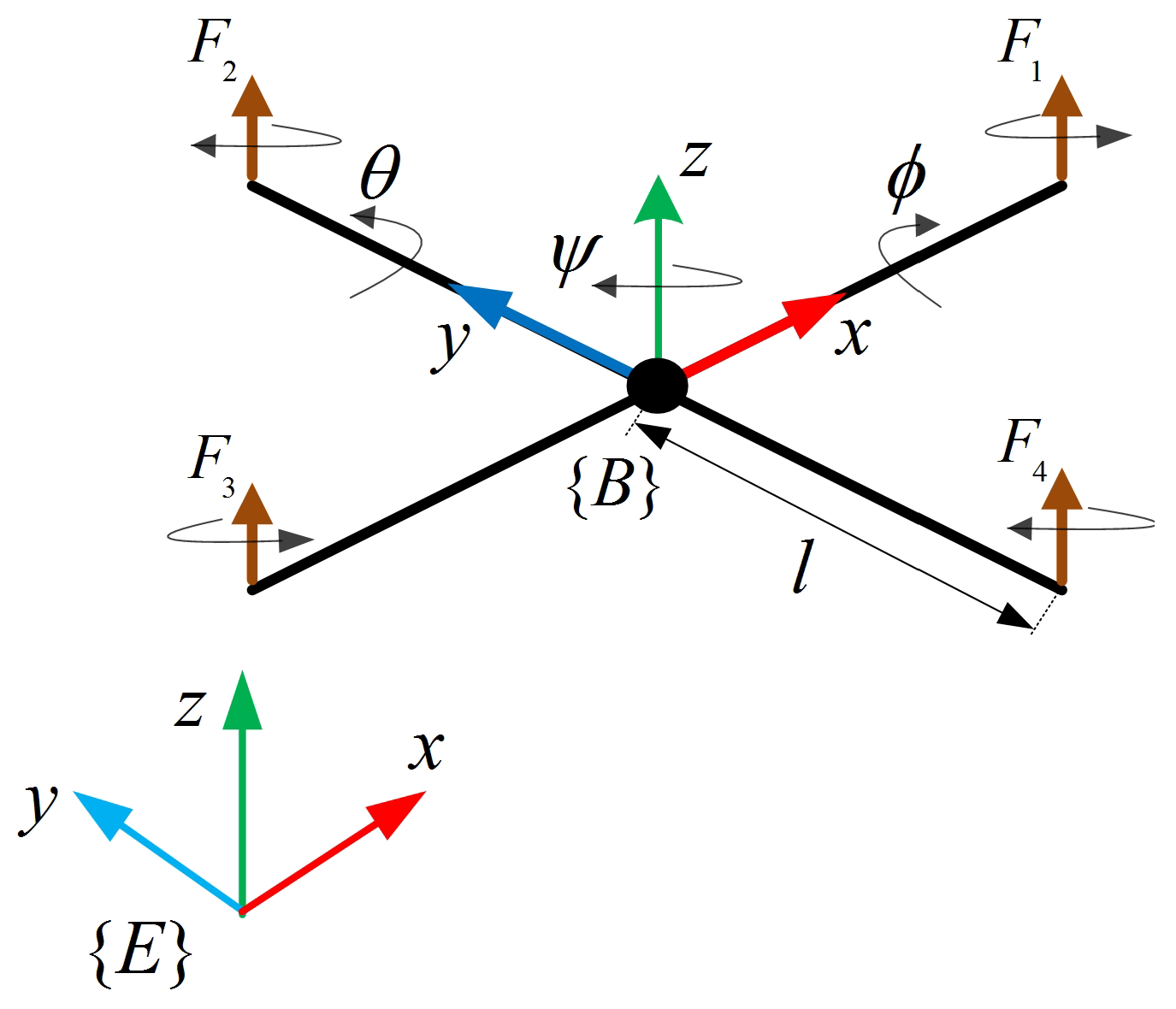
2. Quadrotor Dynamics Model and Problem Formulation
3. Extended State Observer
4. Robust Saturated Backstepping Tracking Controller Design
5. Closed-Loop System’s Stability Analysis
6. Numerical Simulation Results and Discussions
6.1. Simulation Assumptions
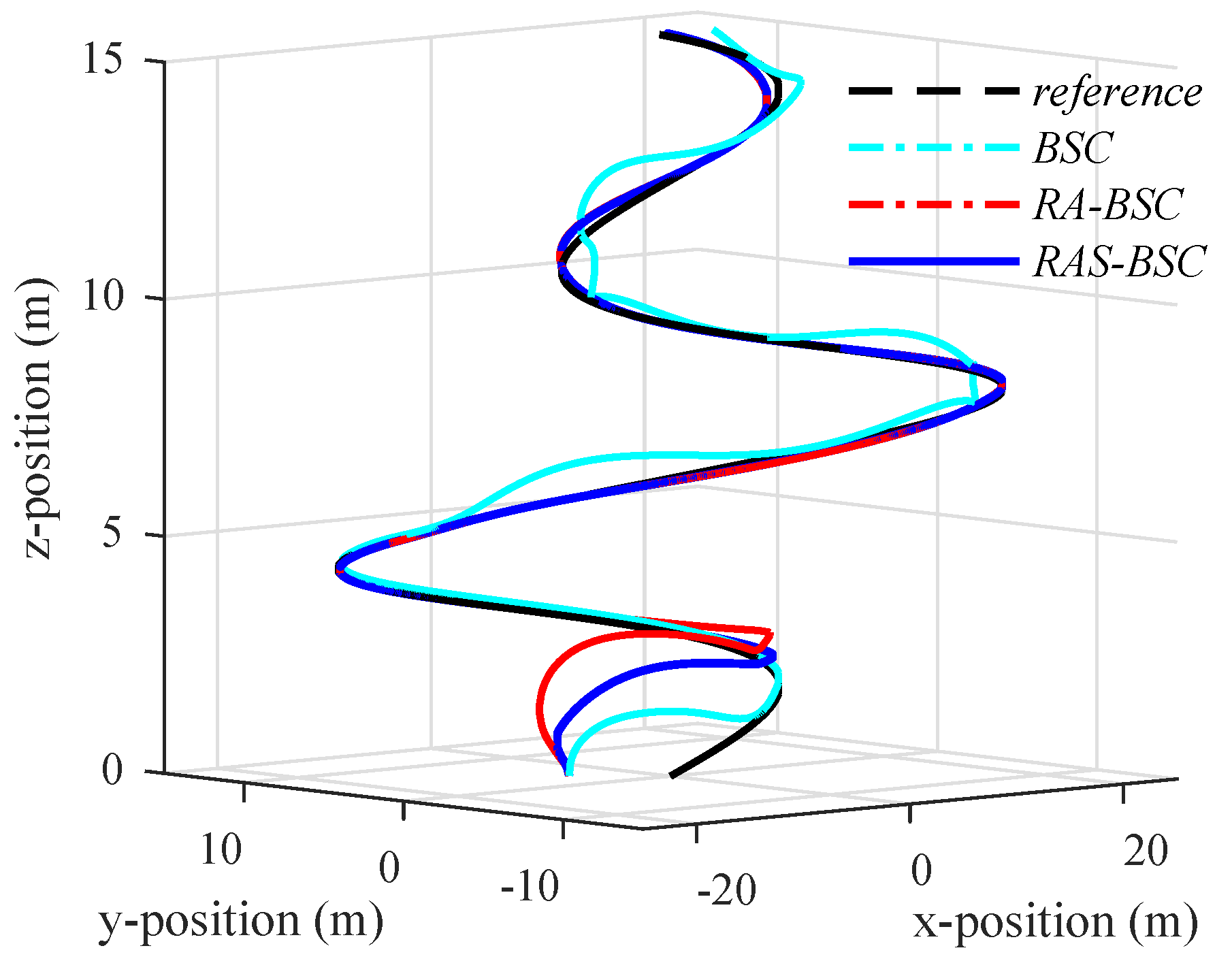
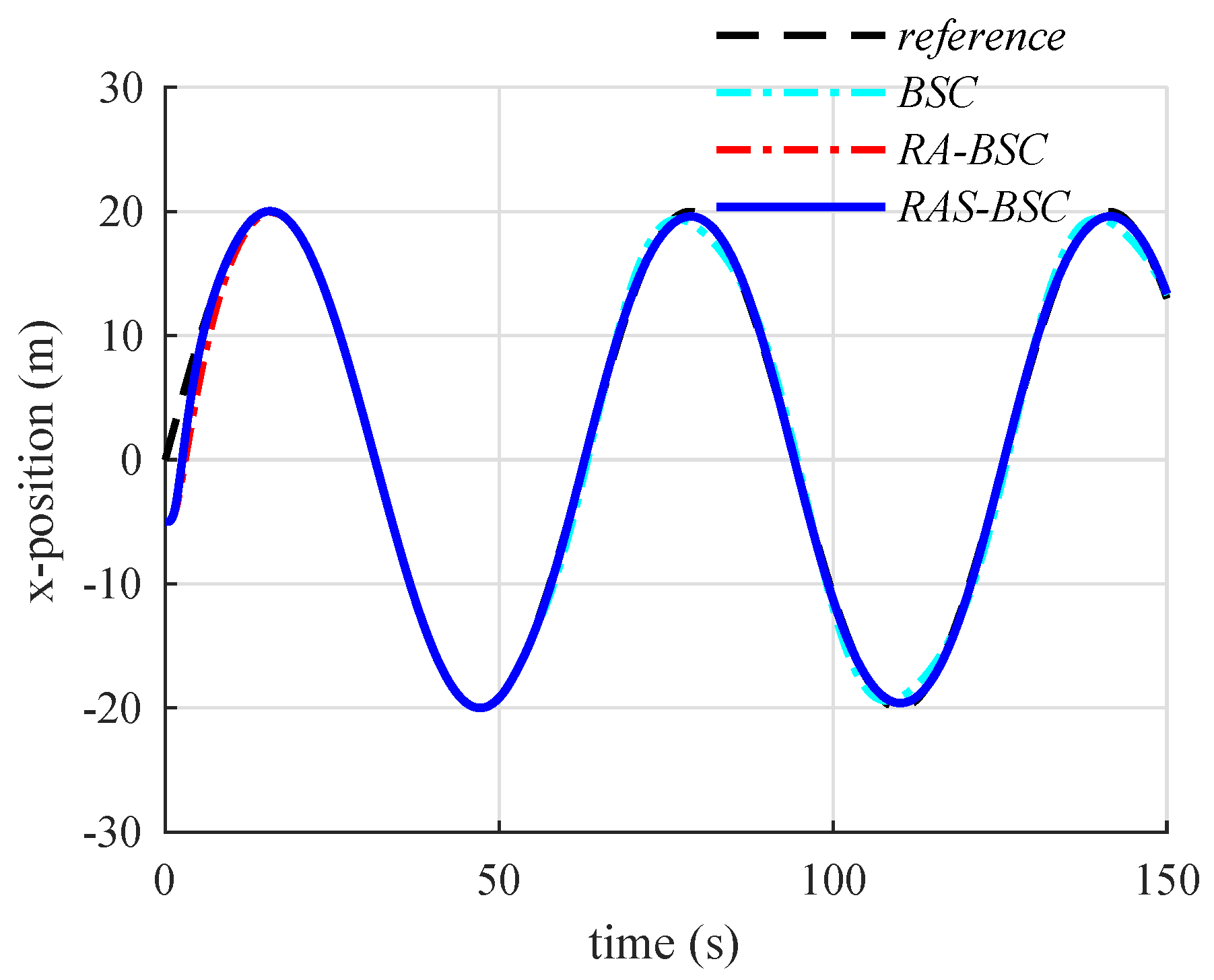
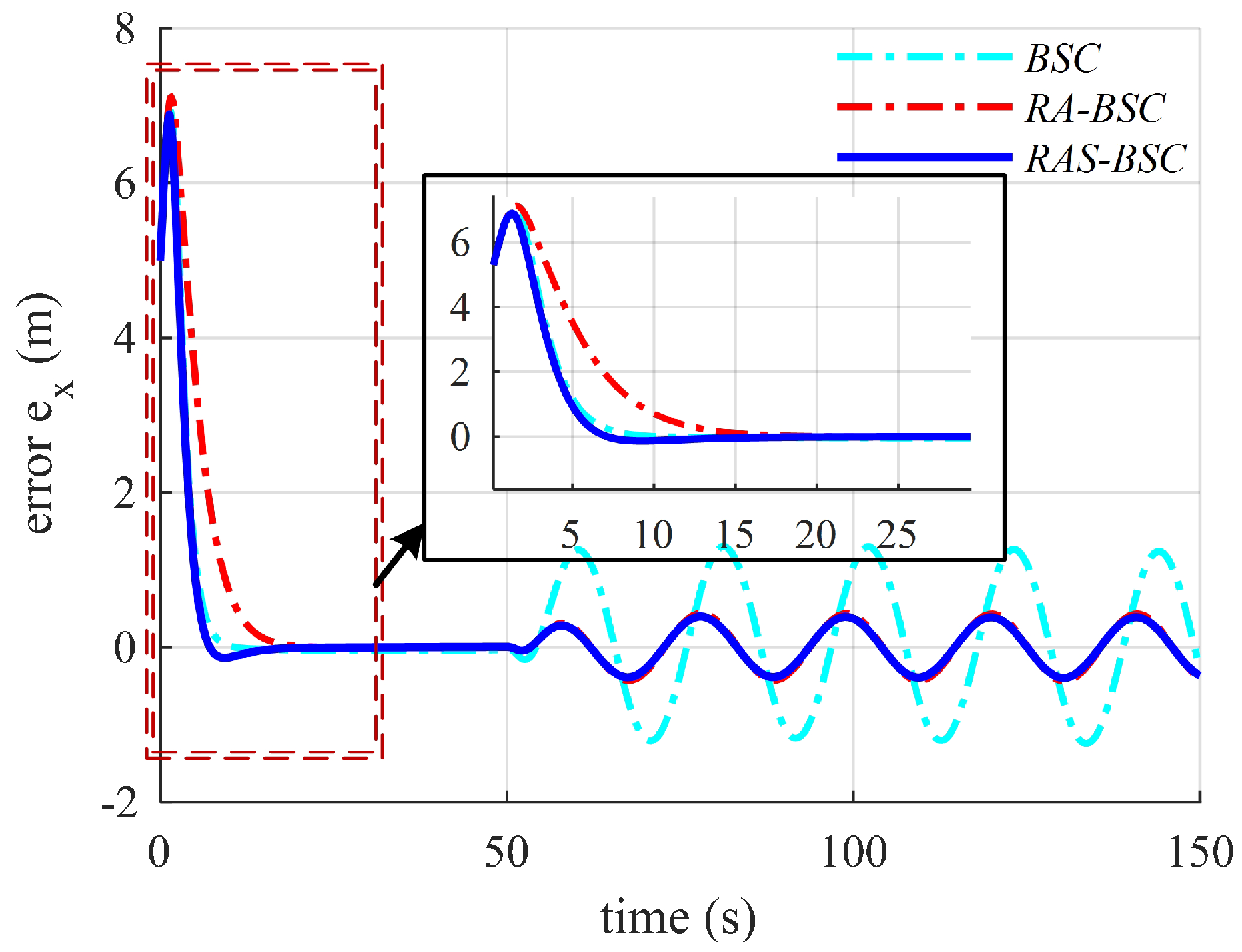
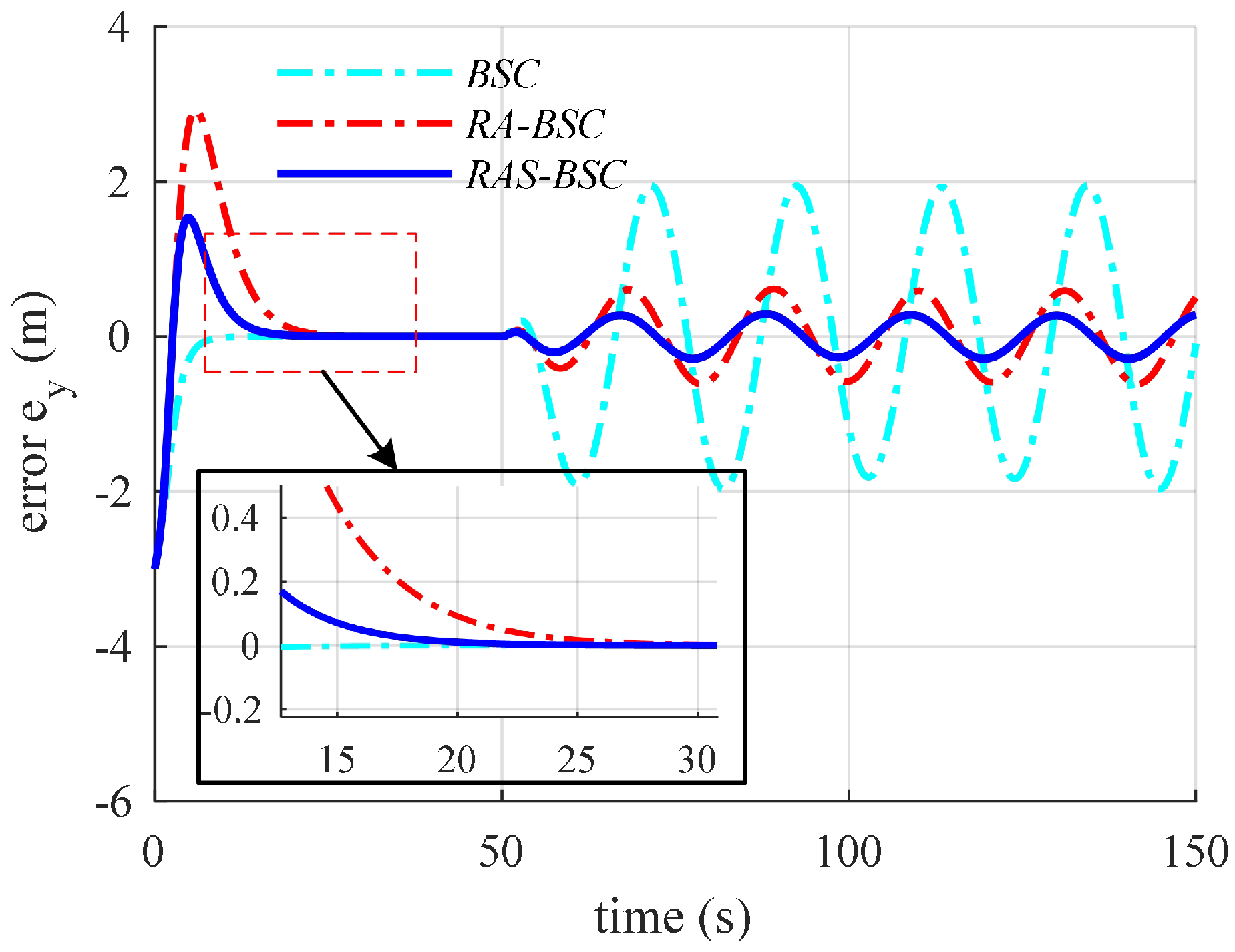
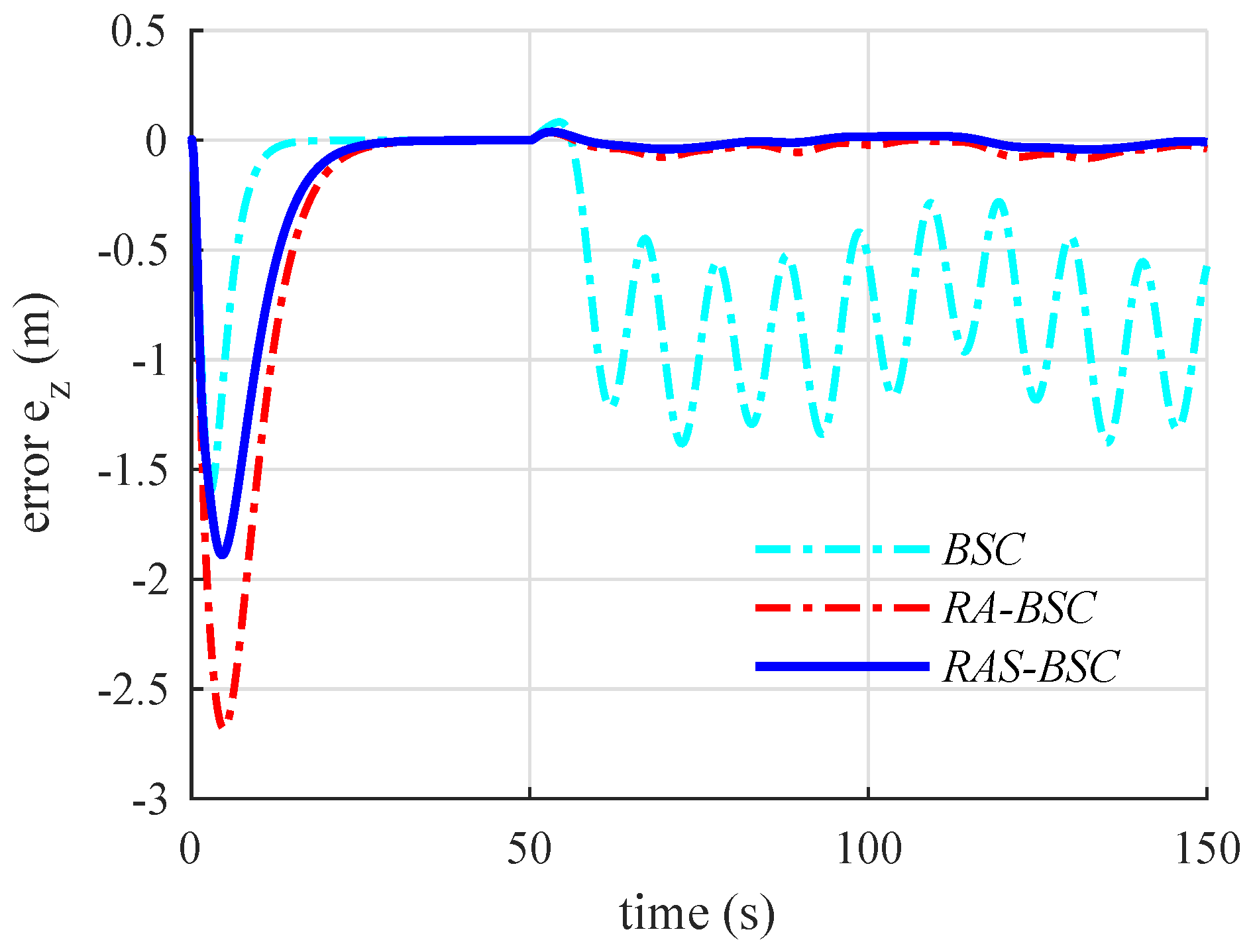
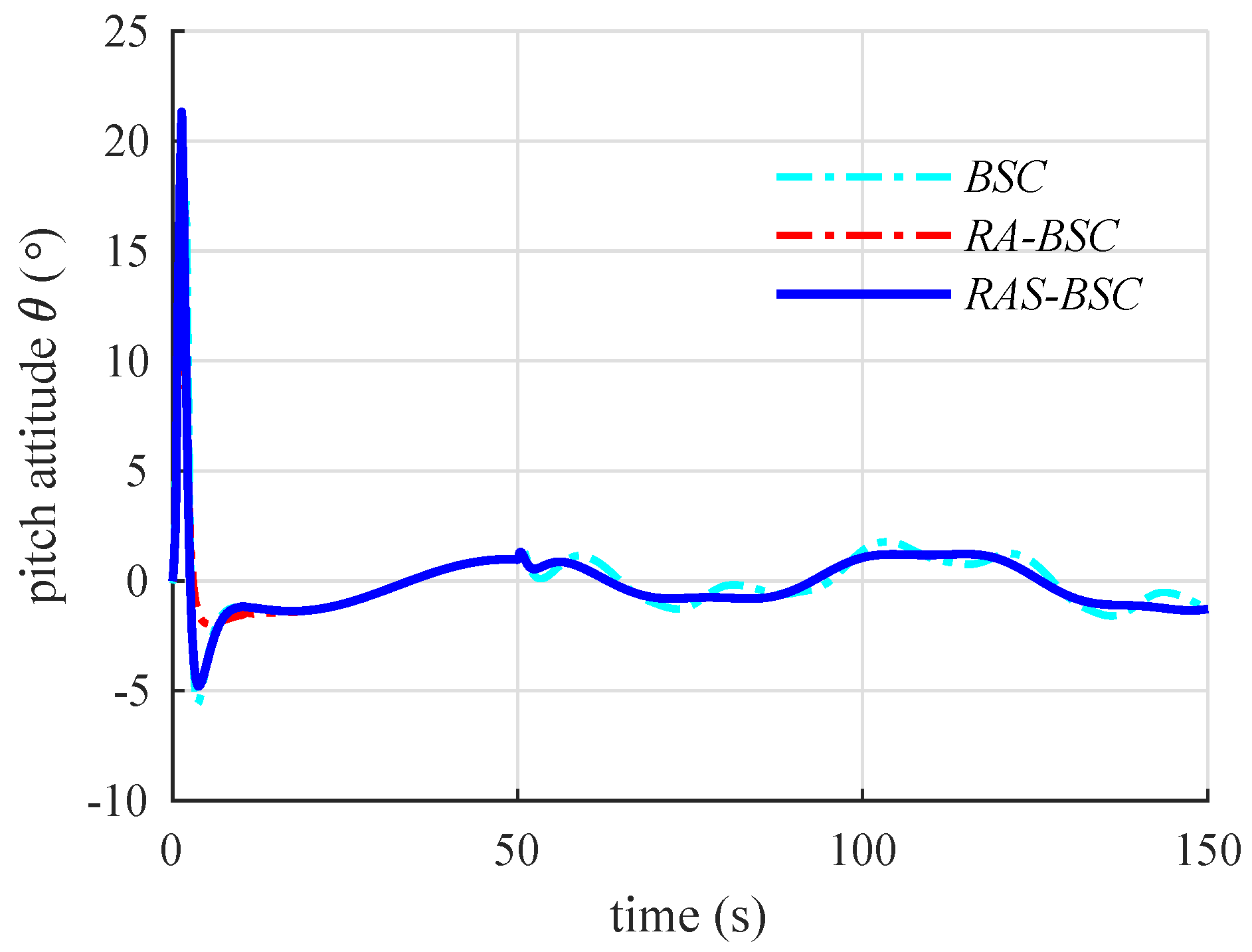
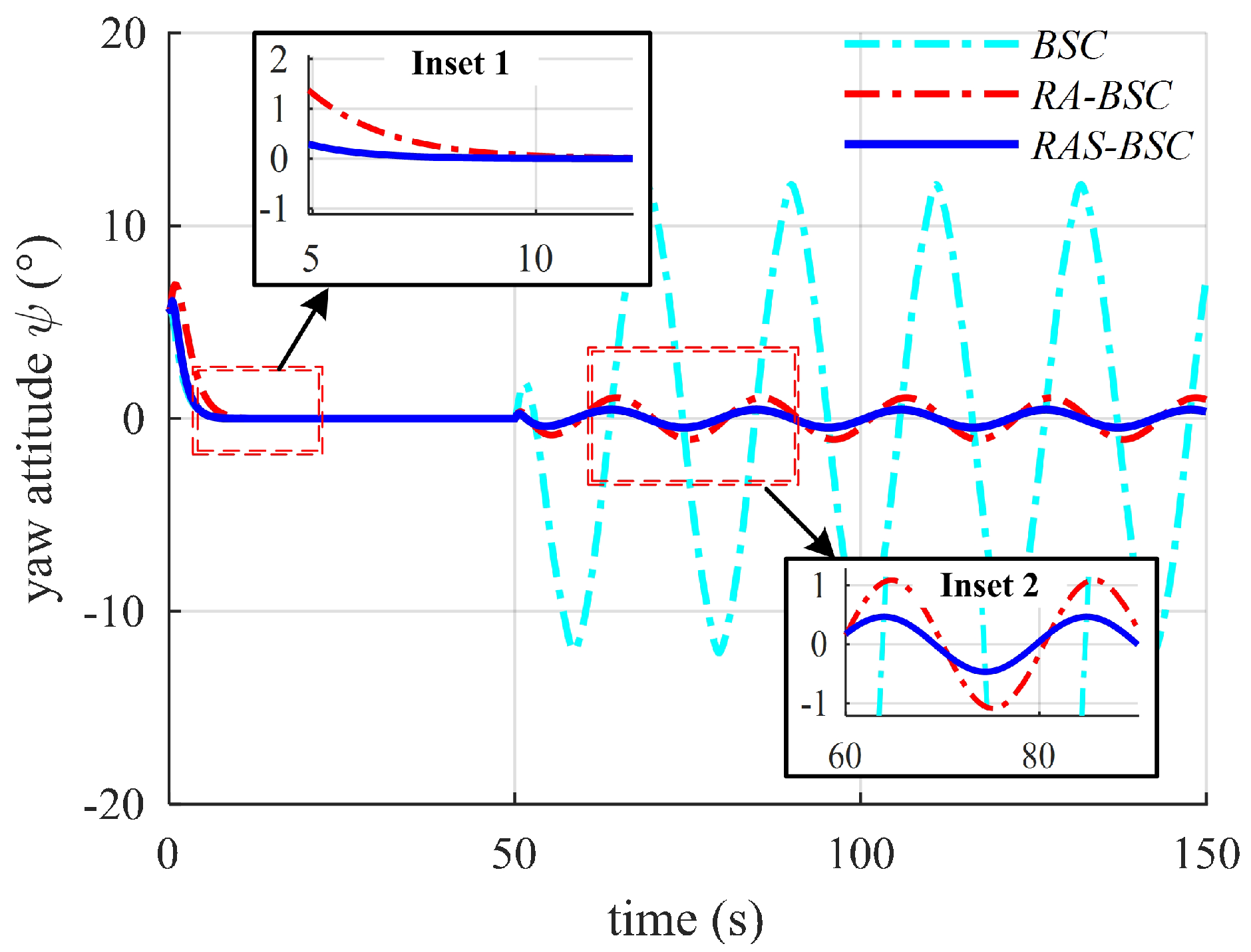
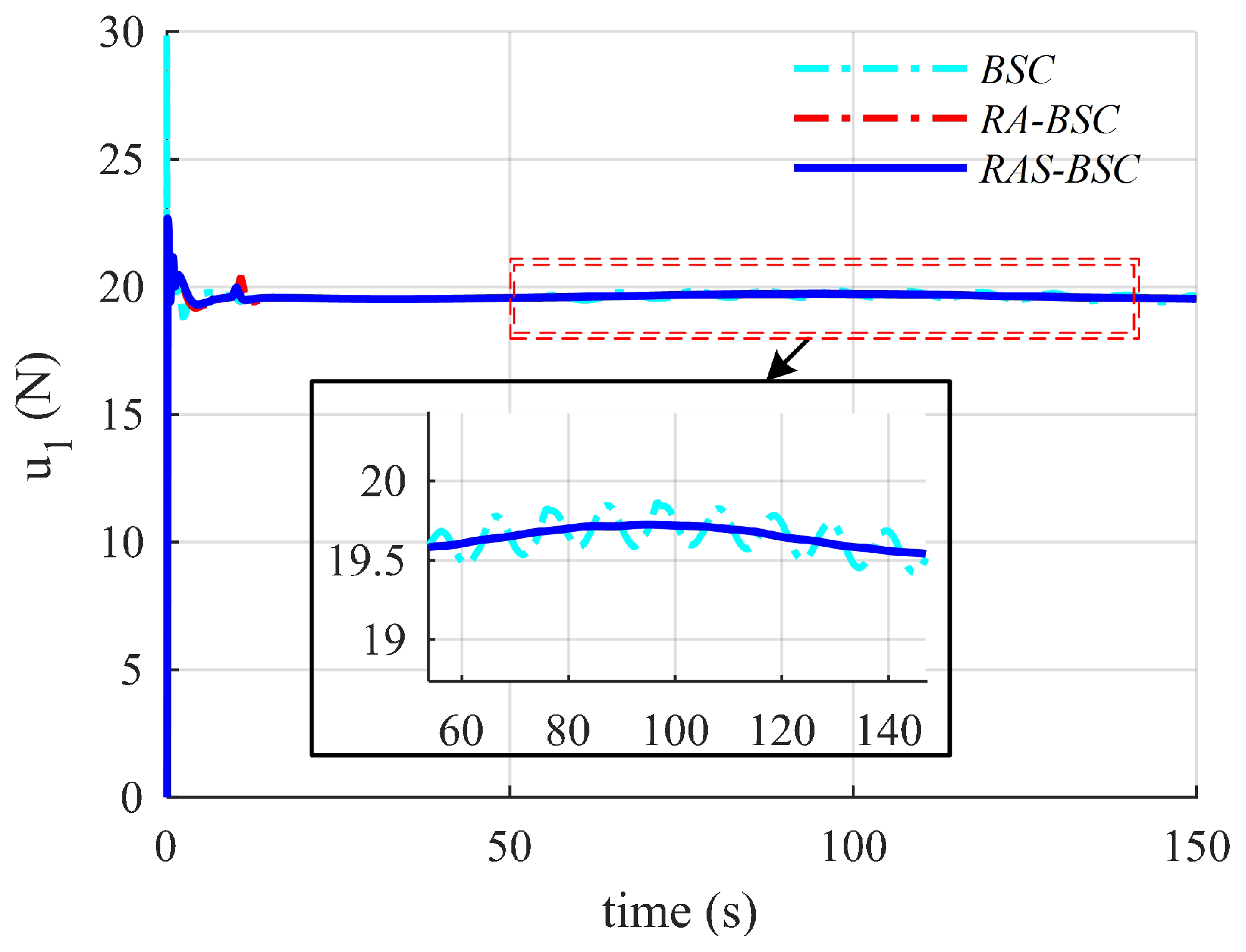
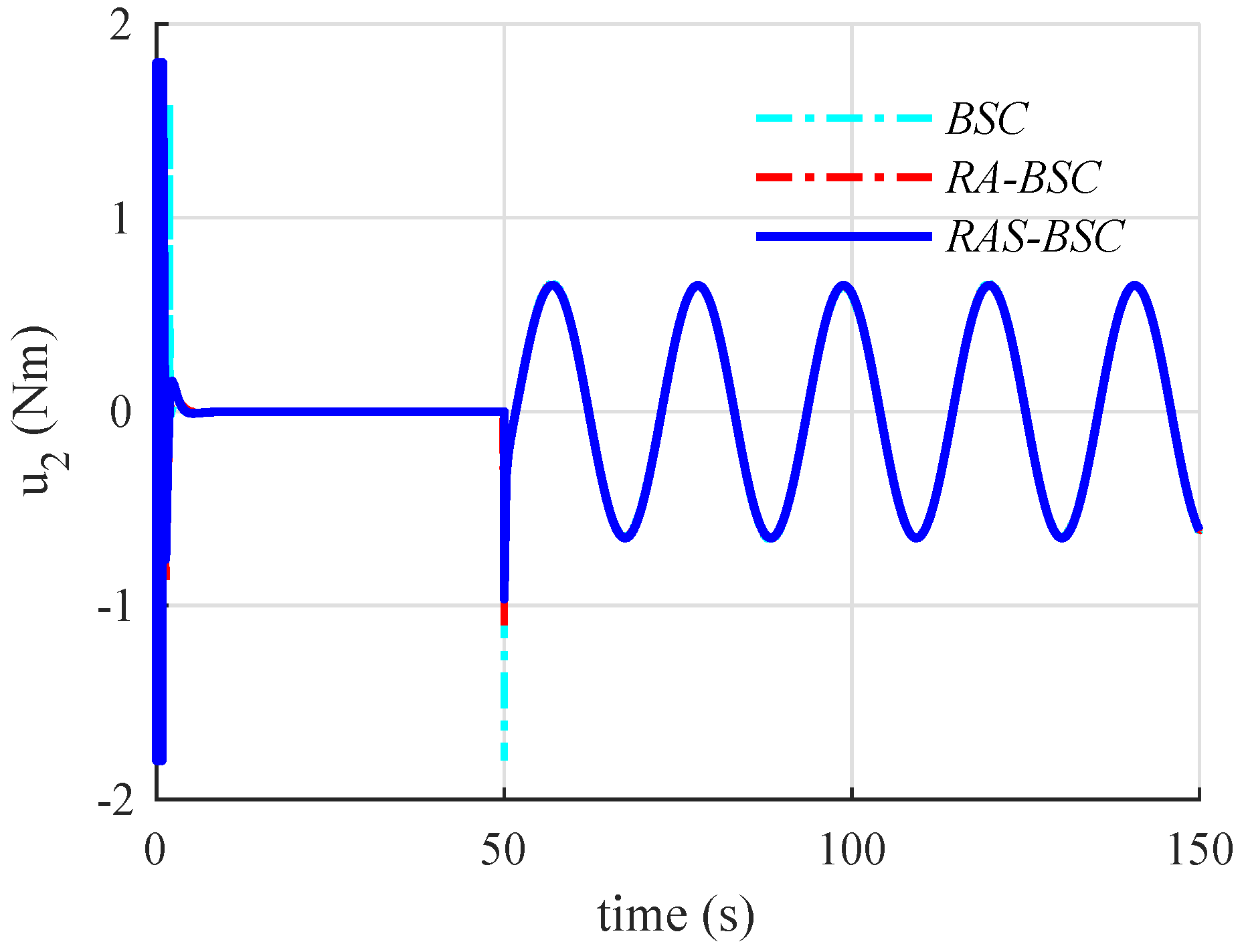
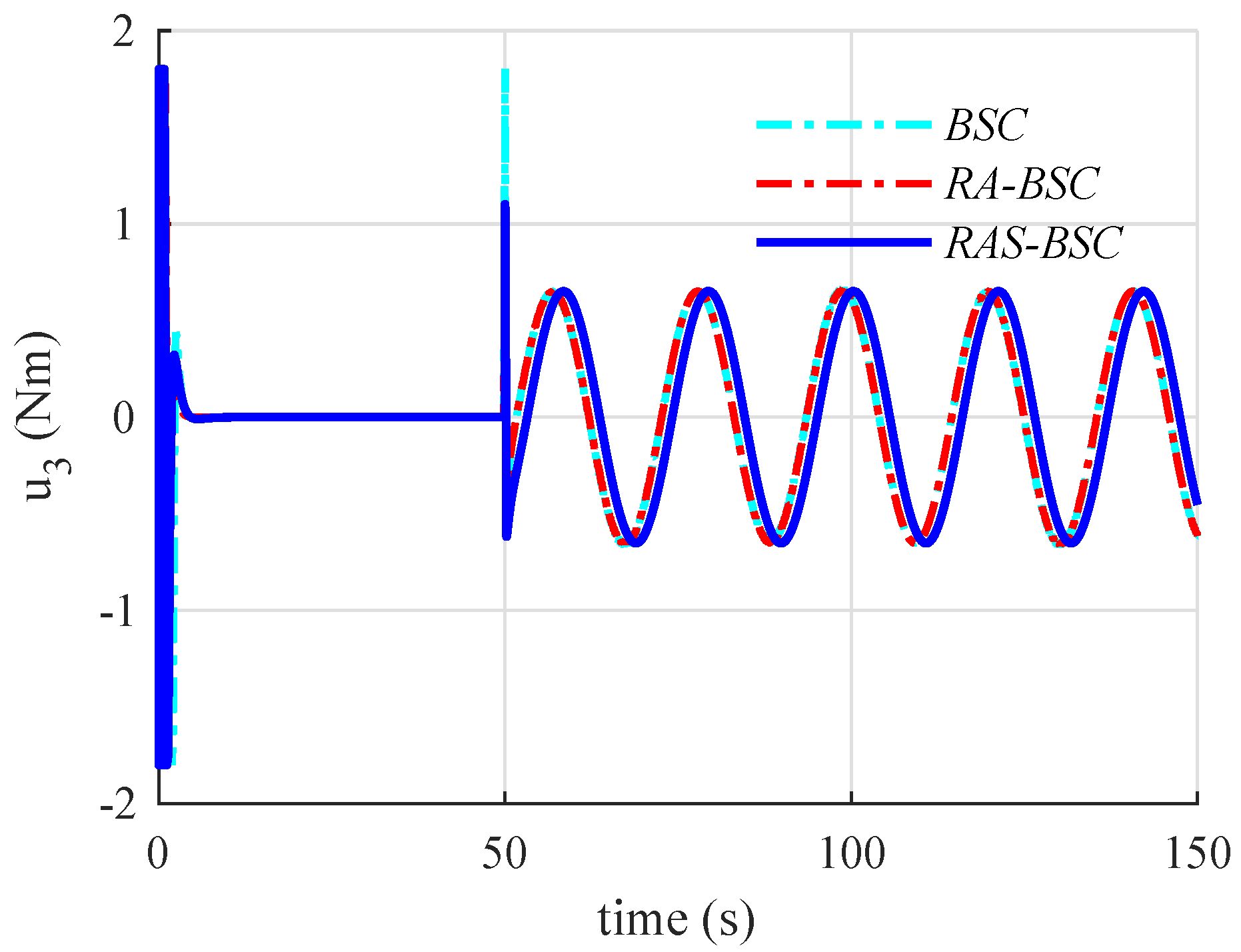
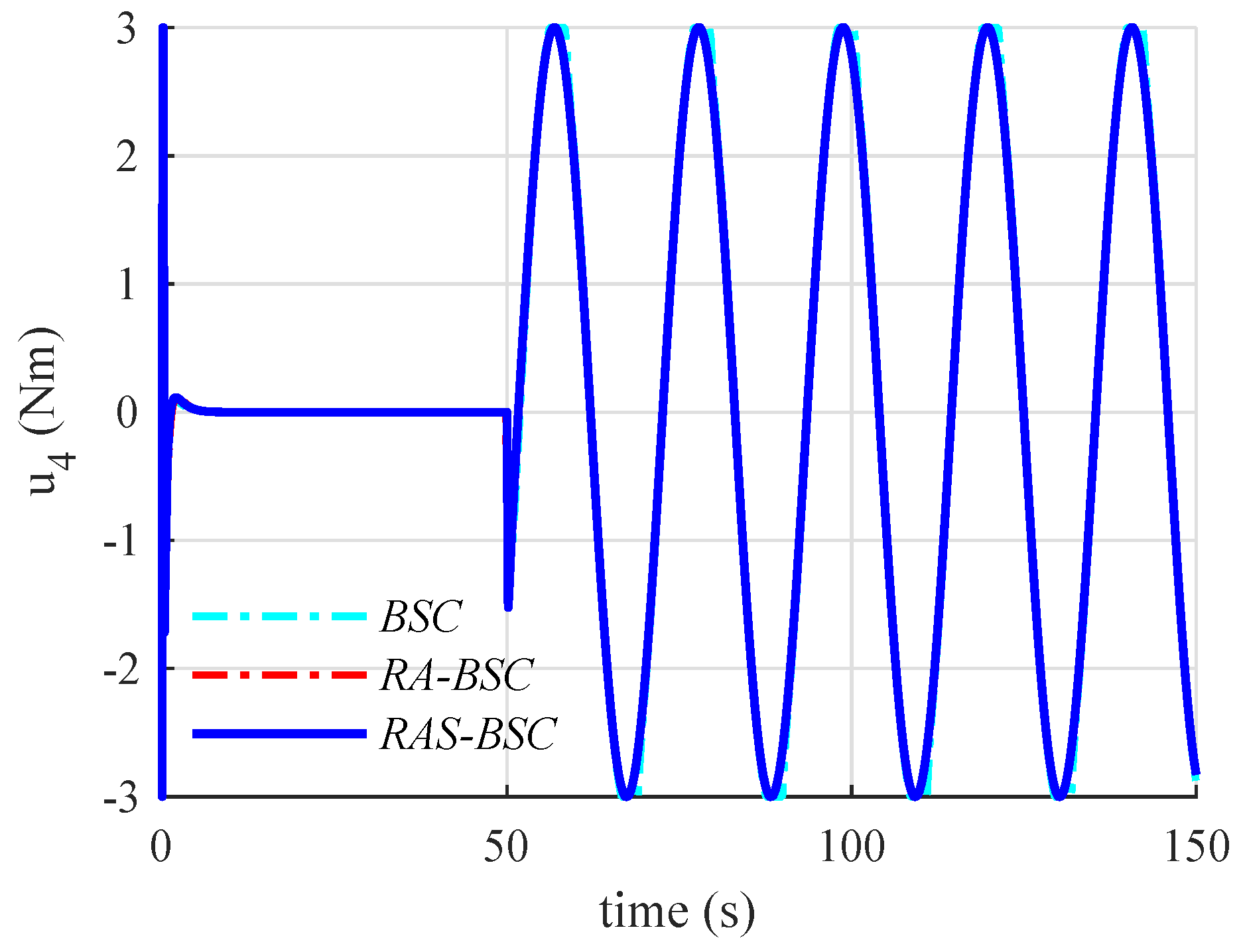
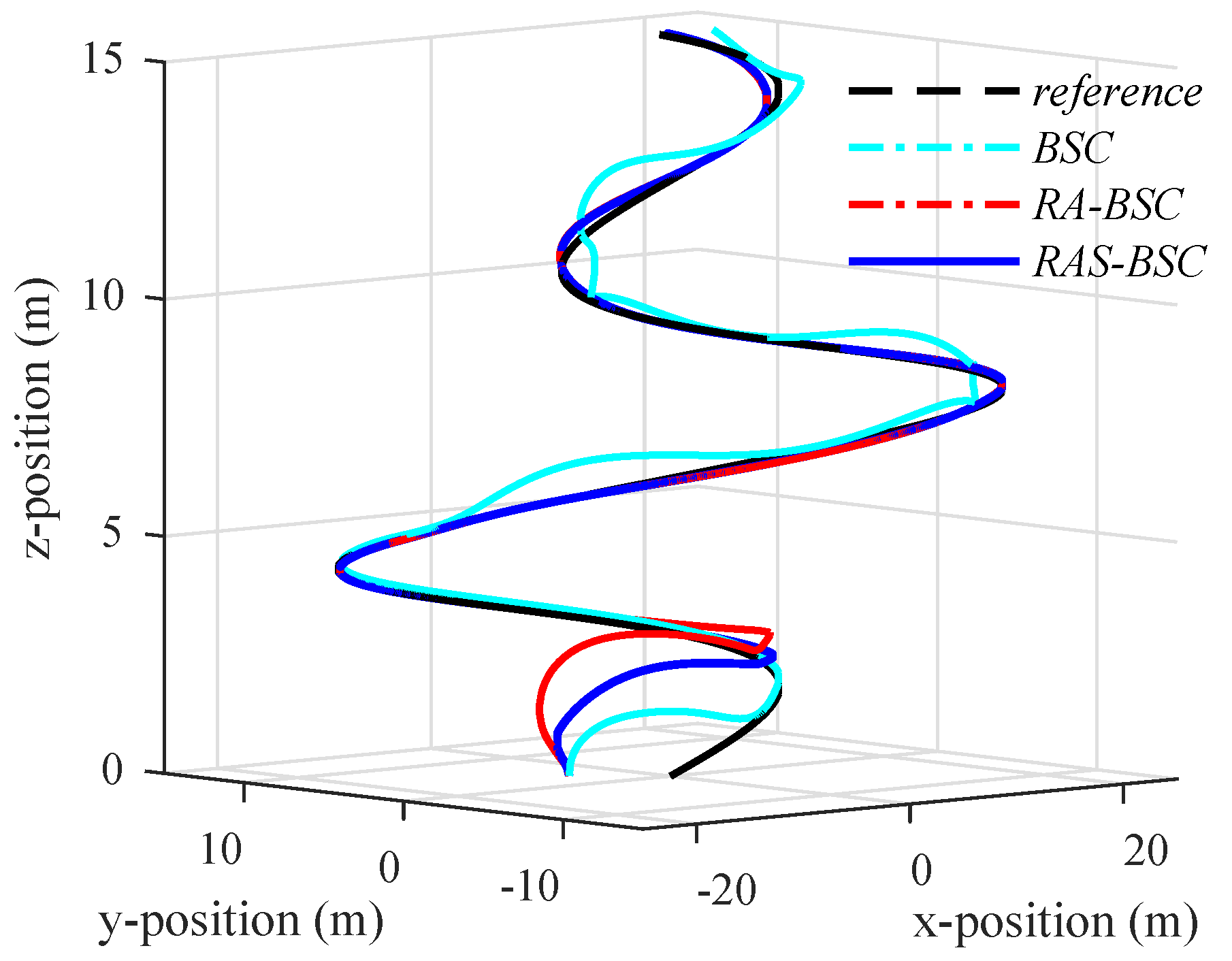
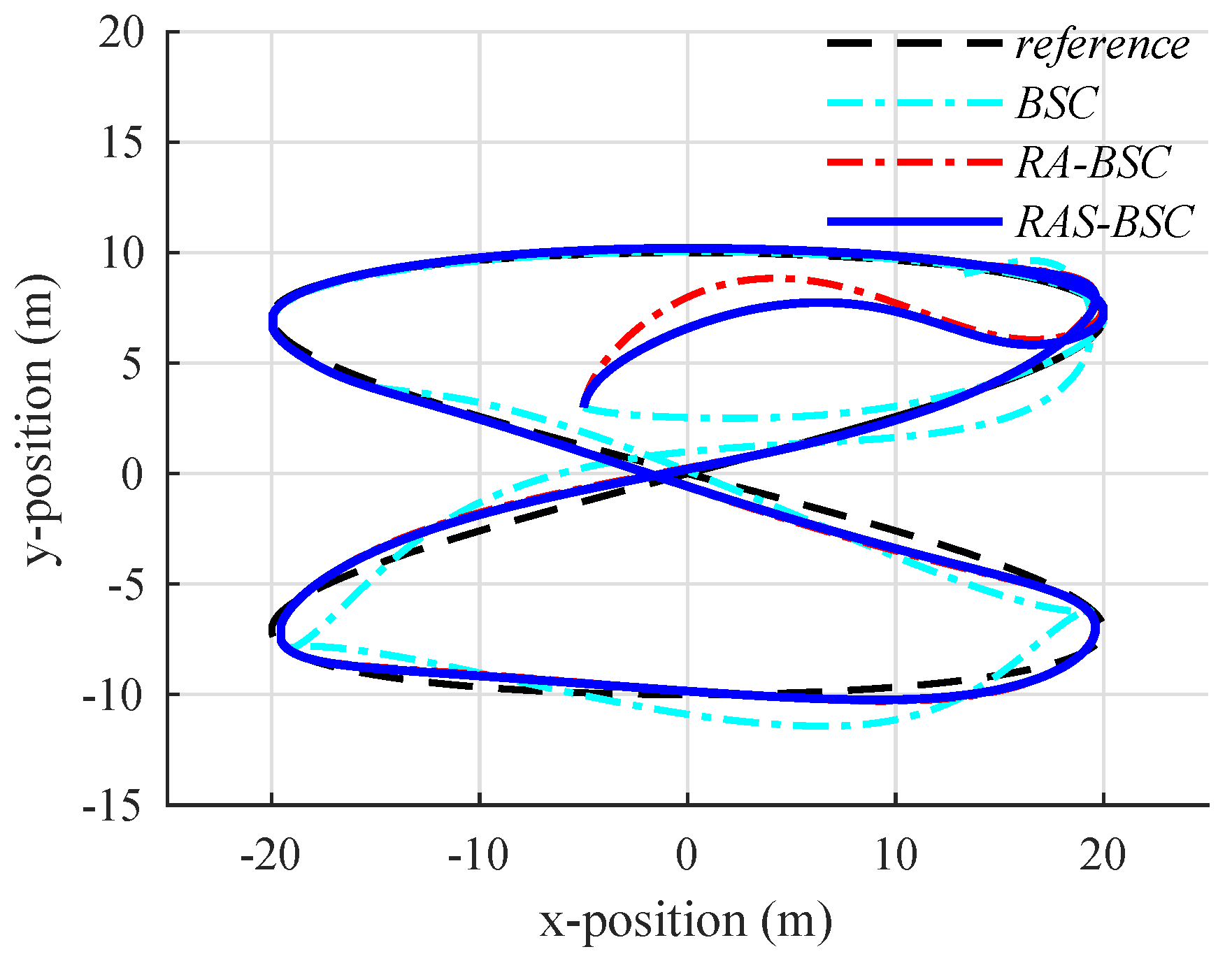
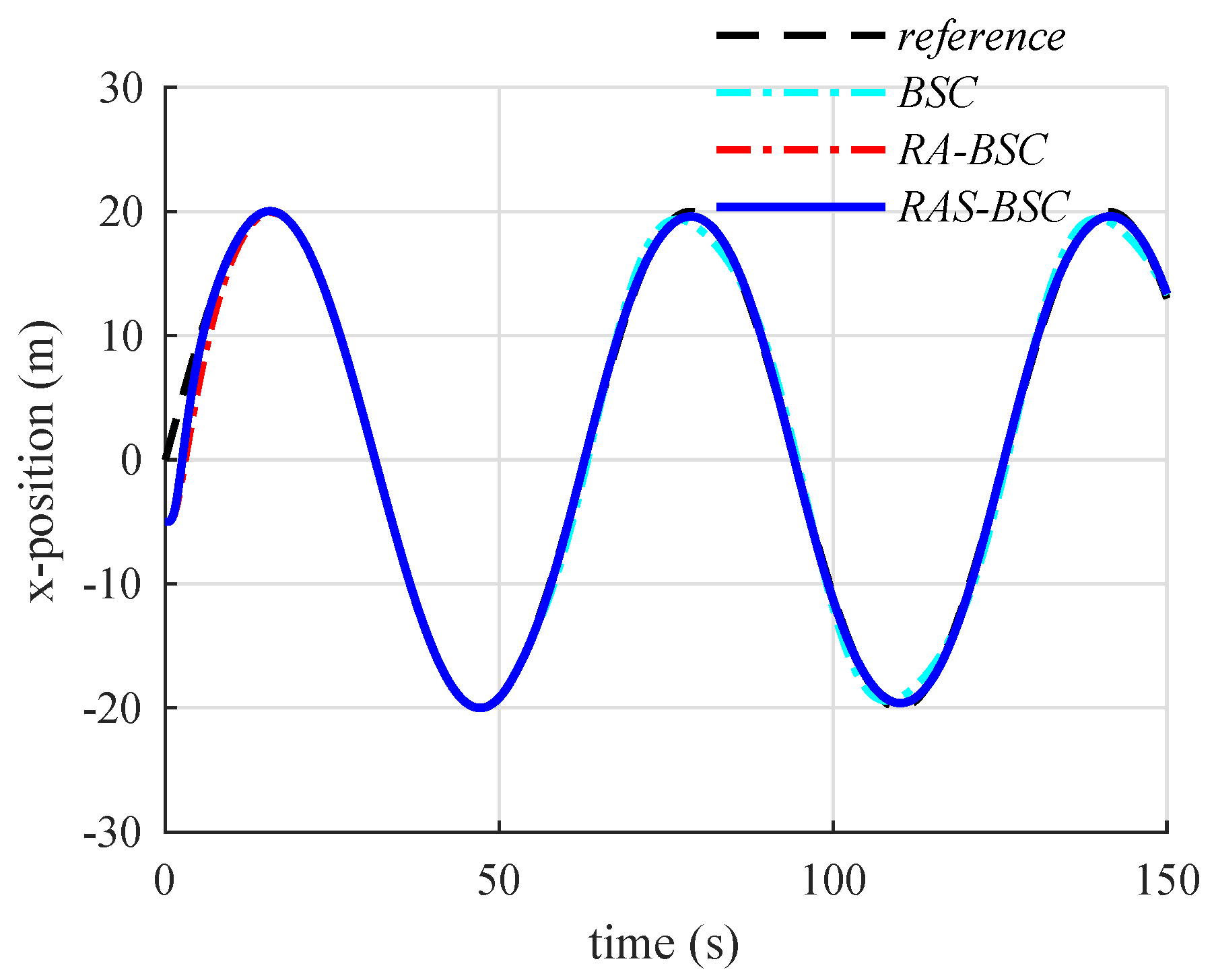
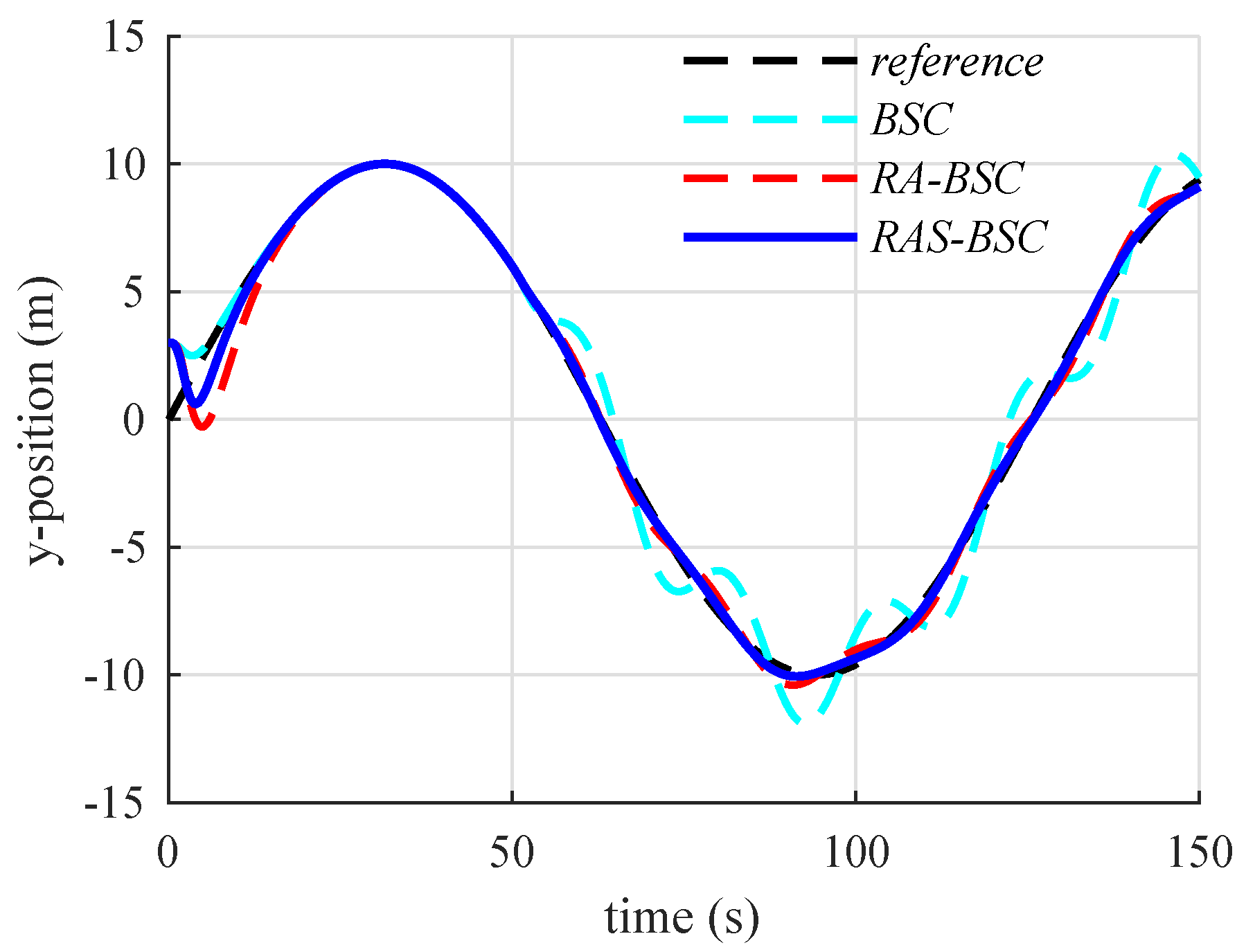
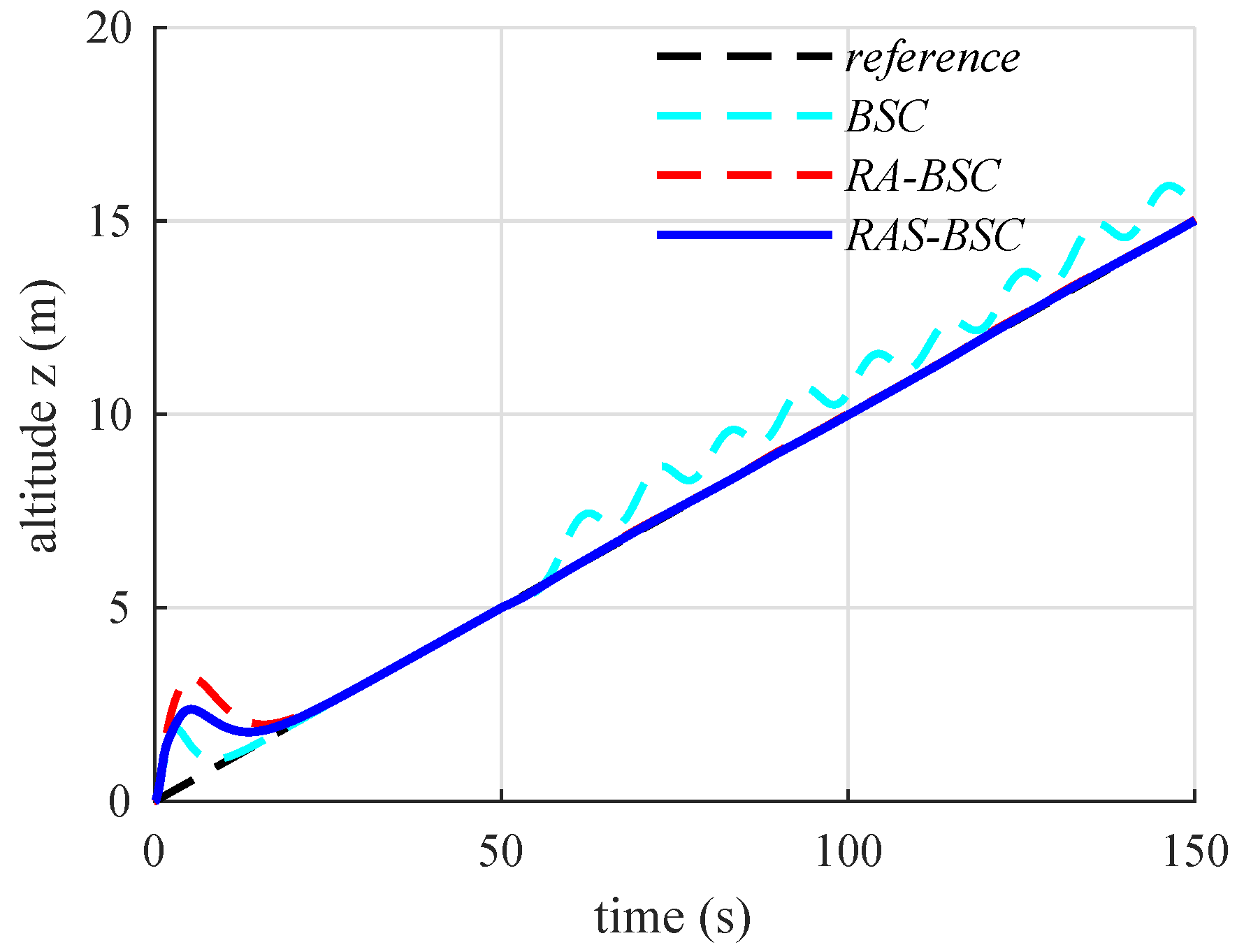
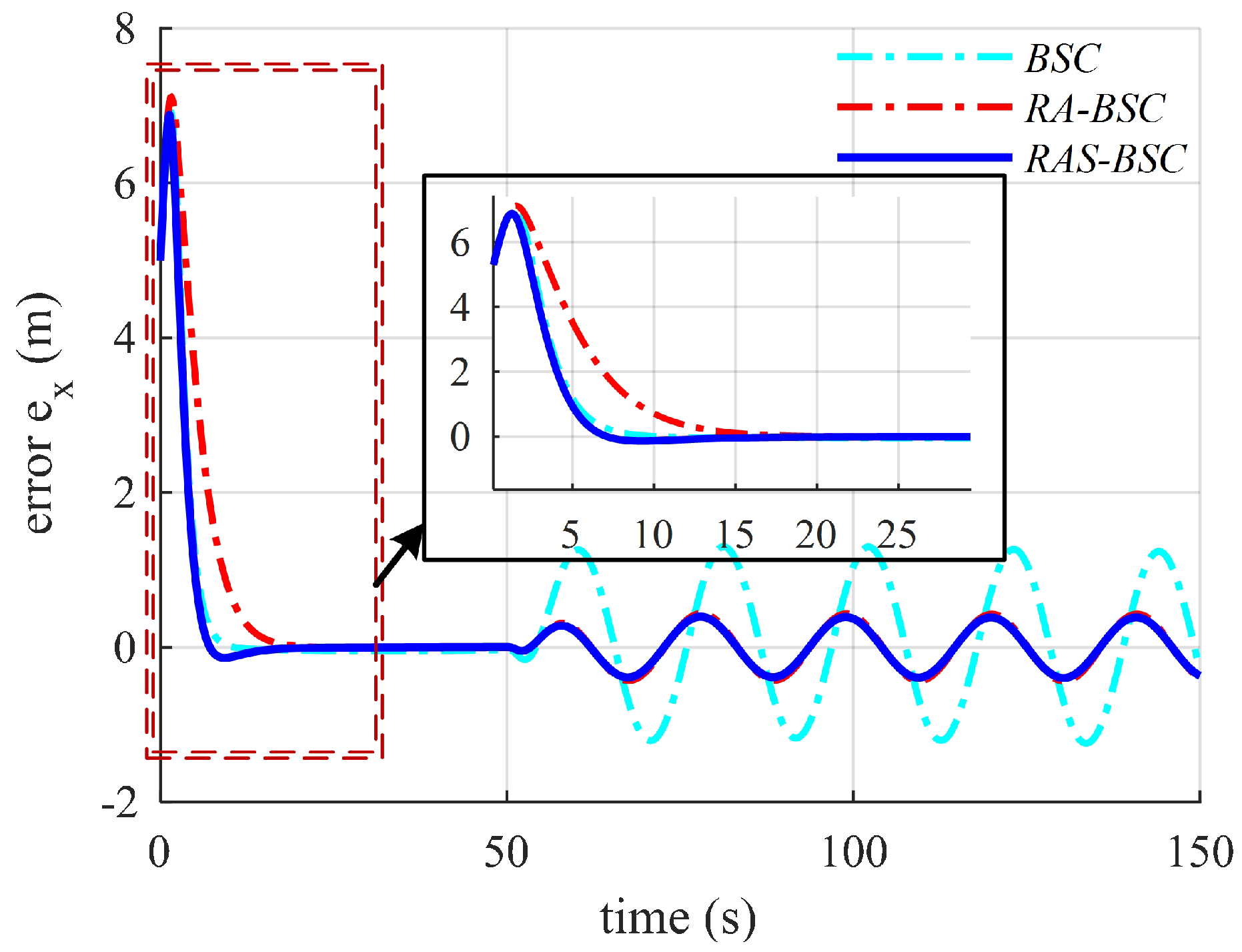
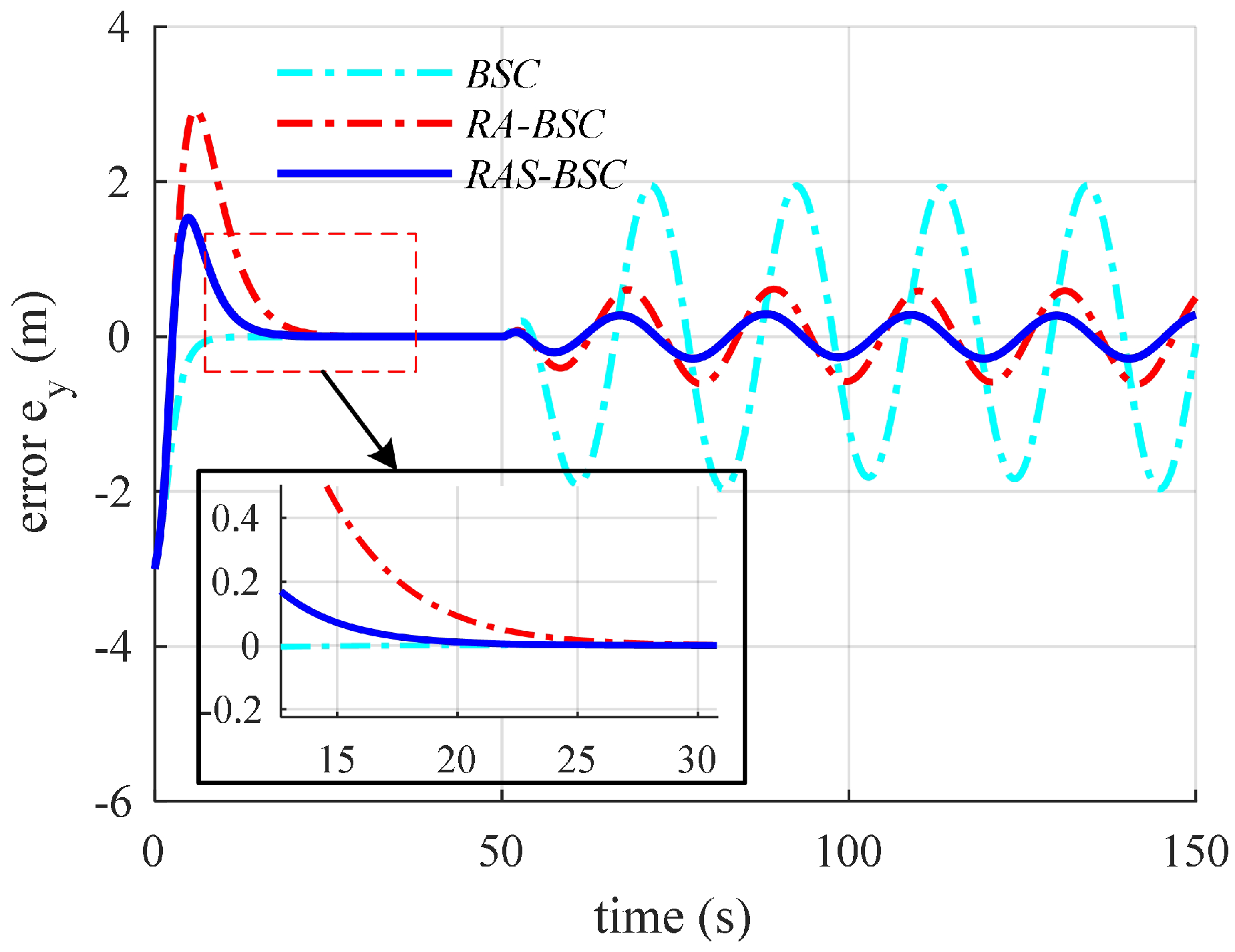
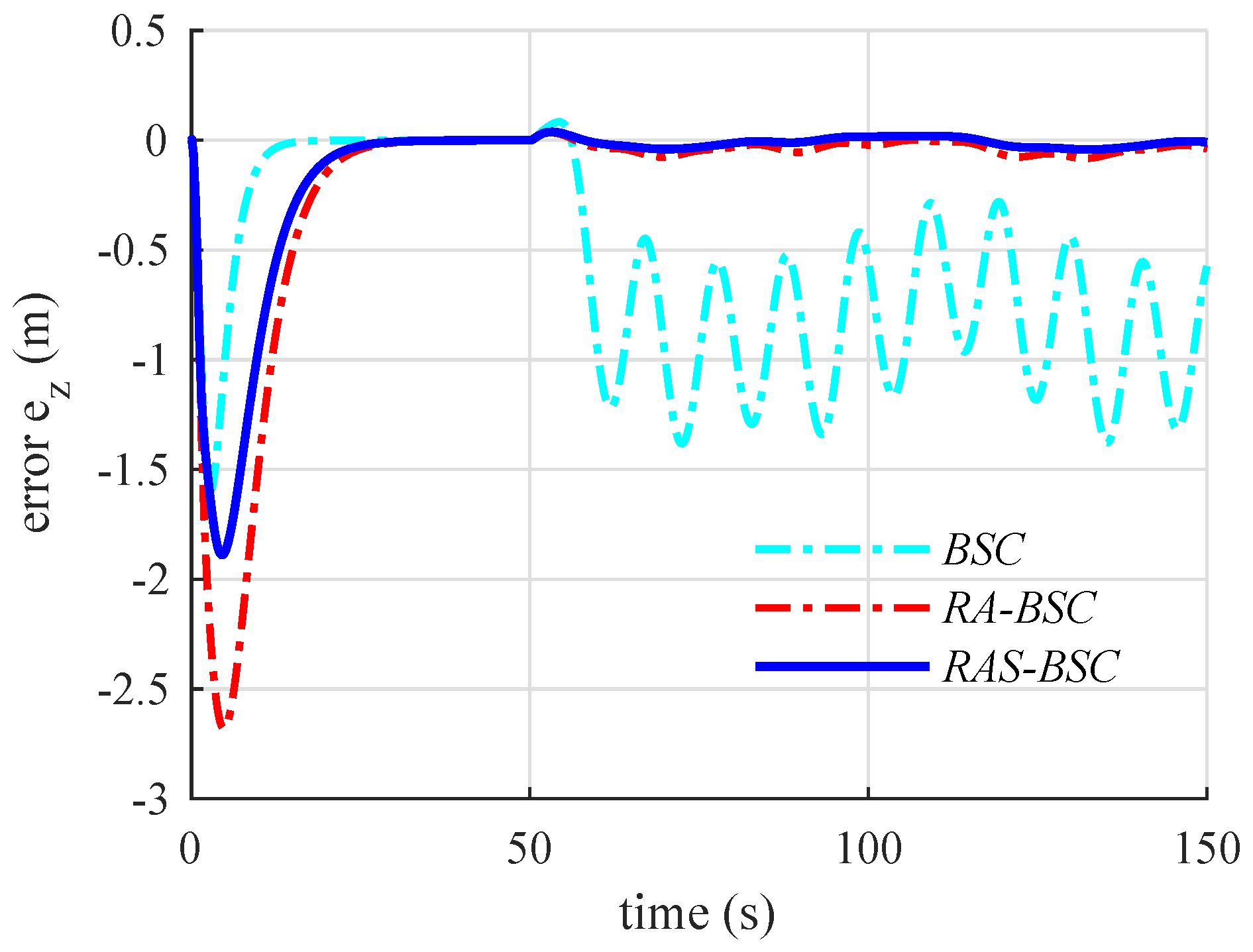
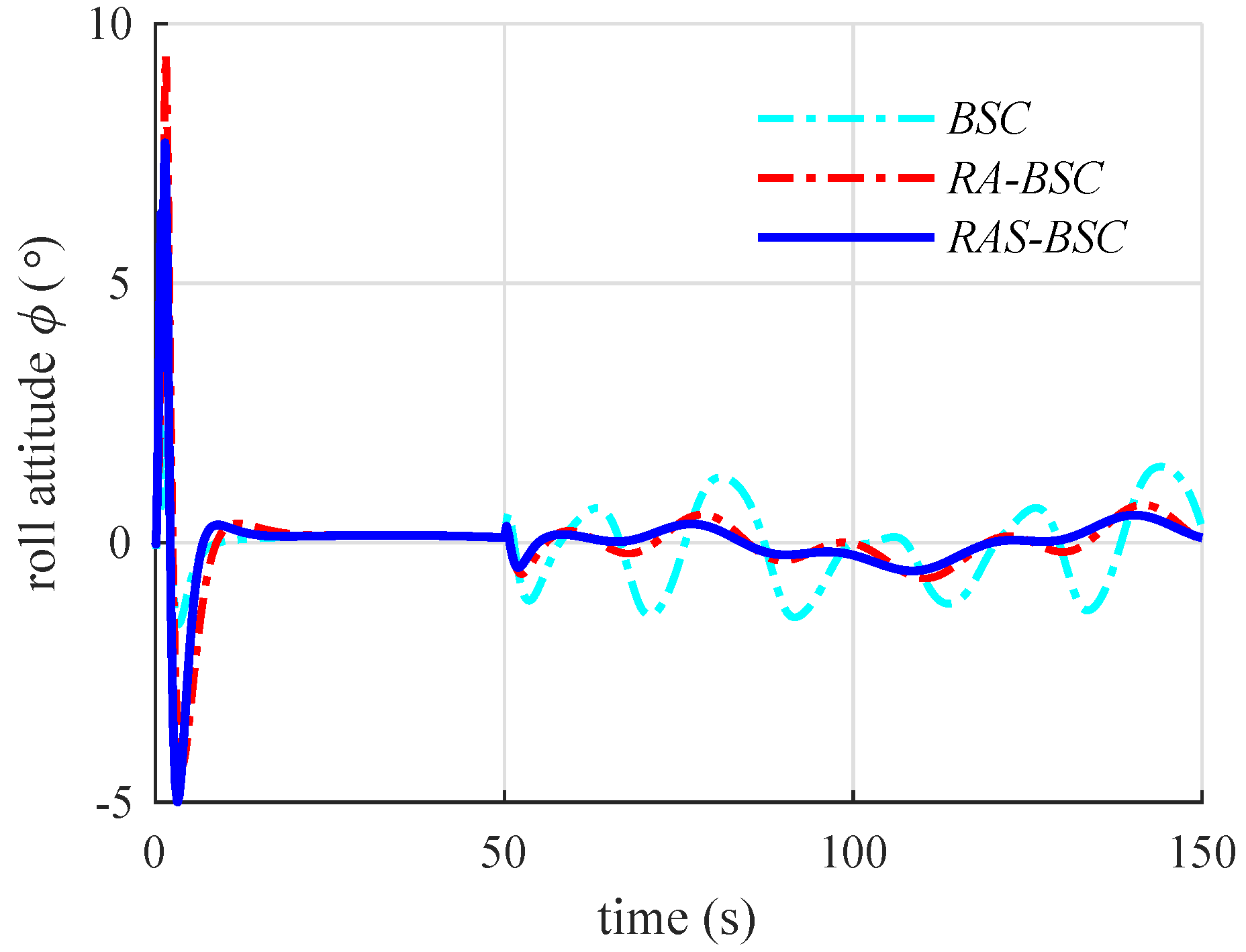
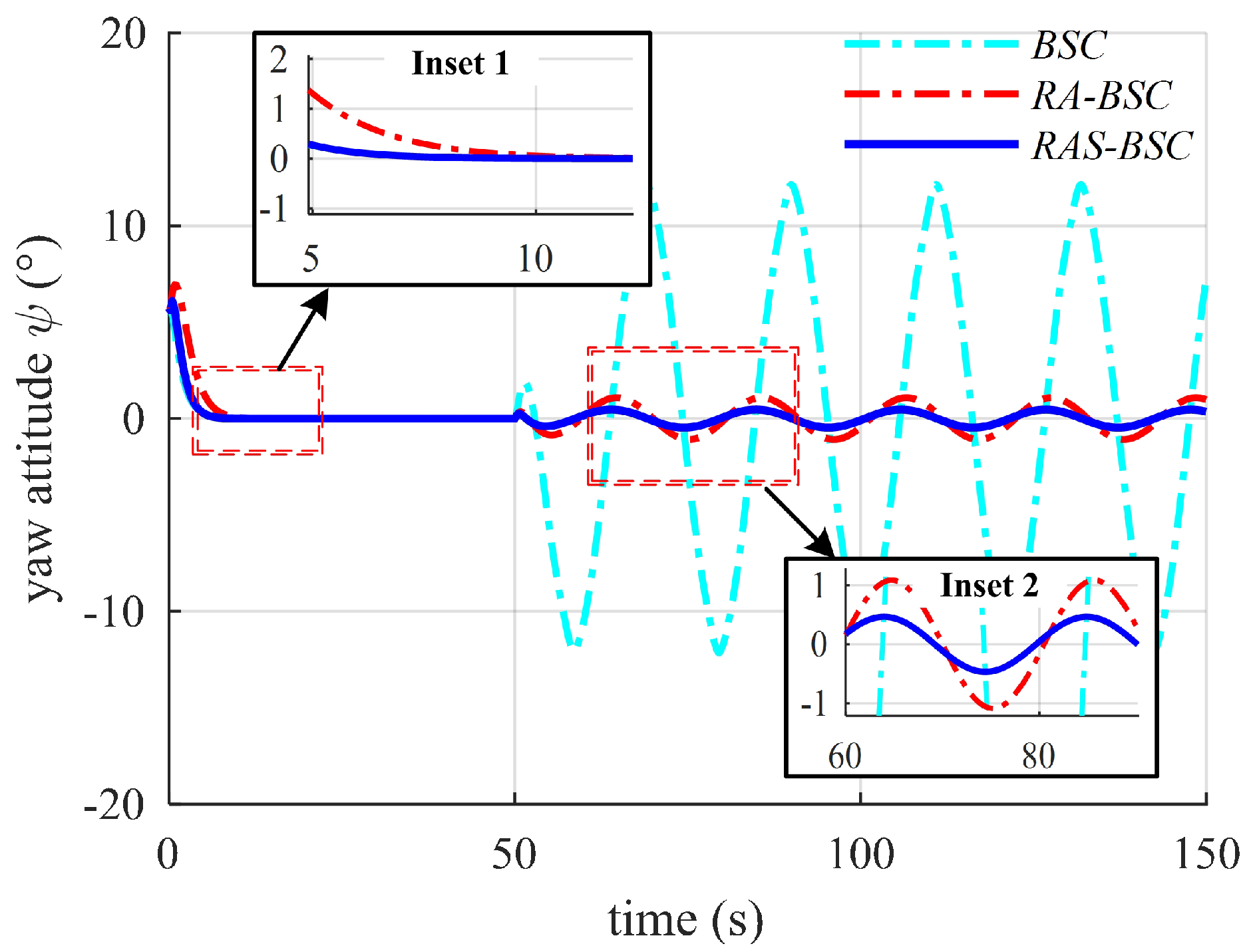
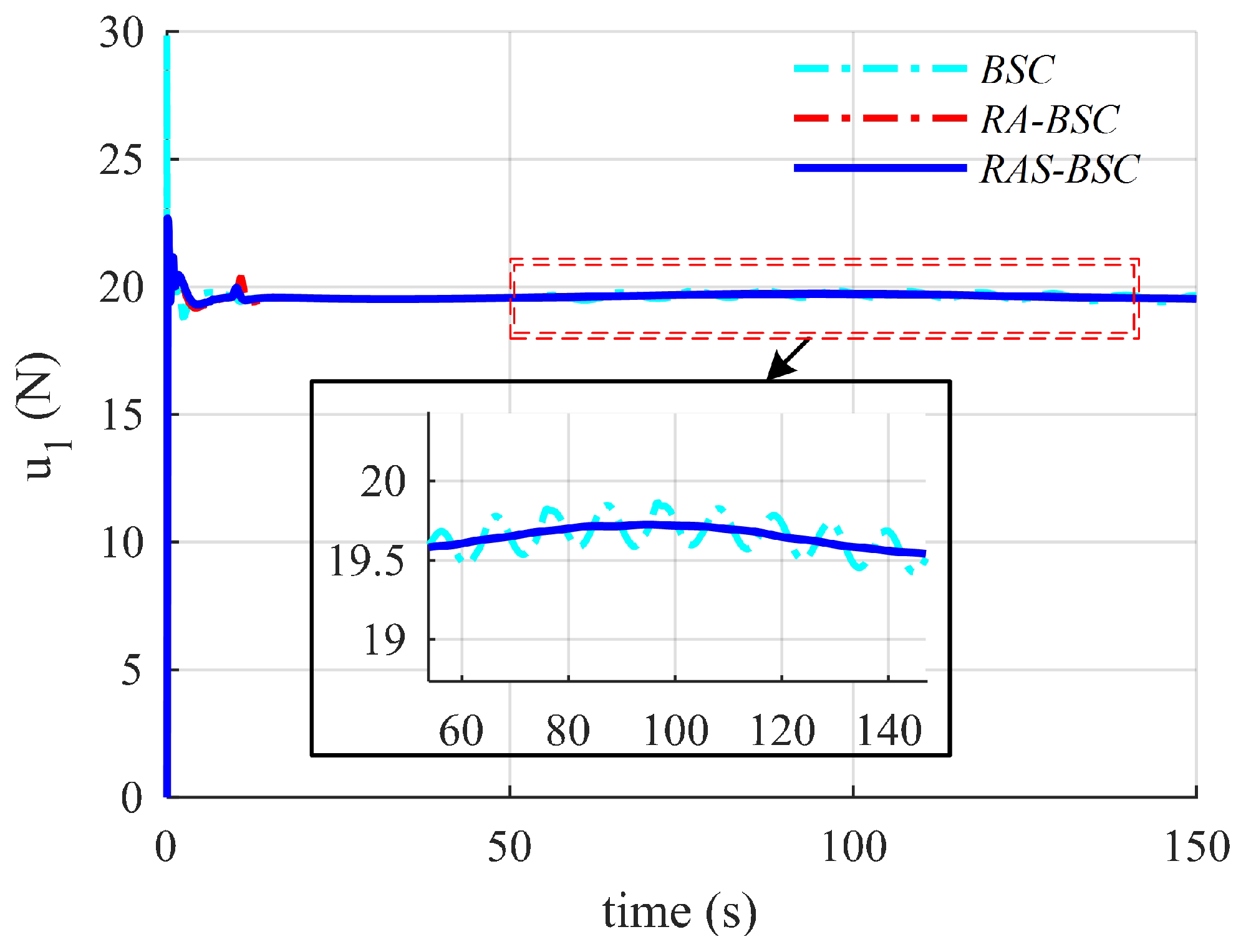
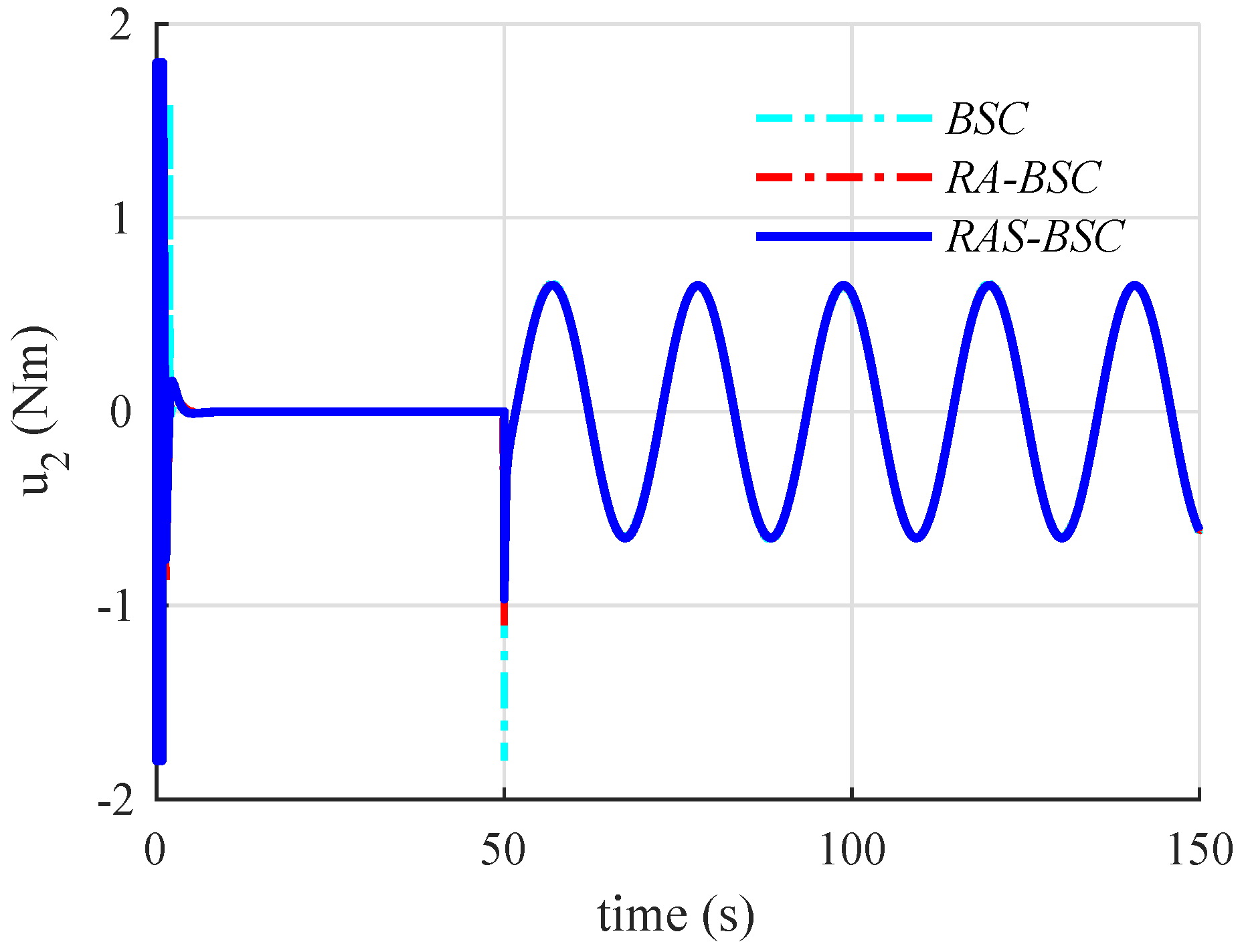
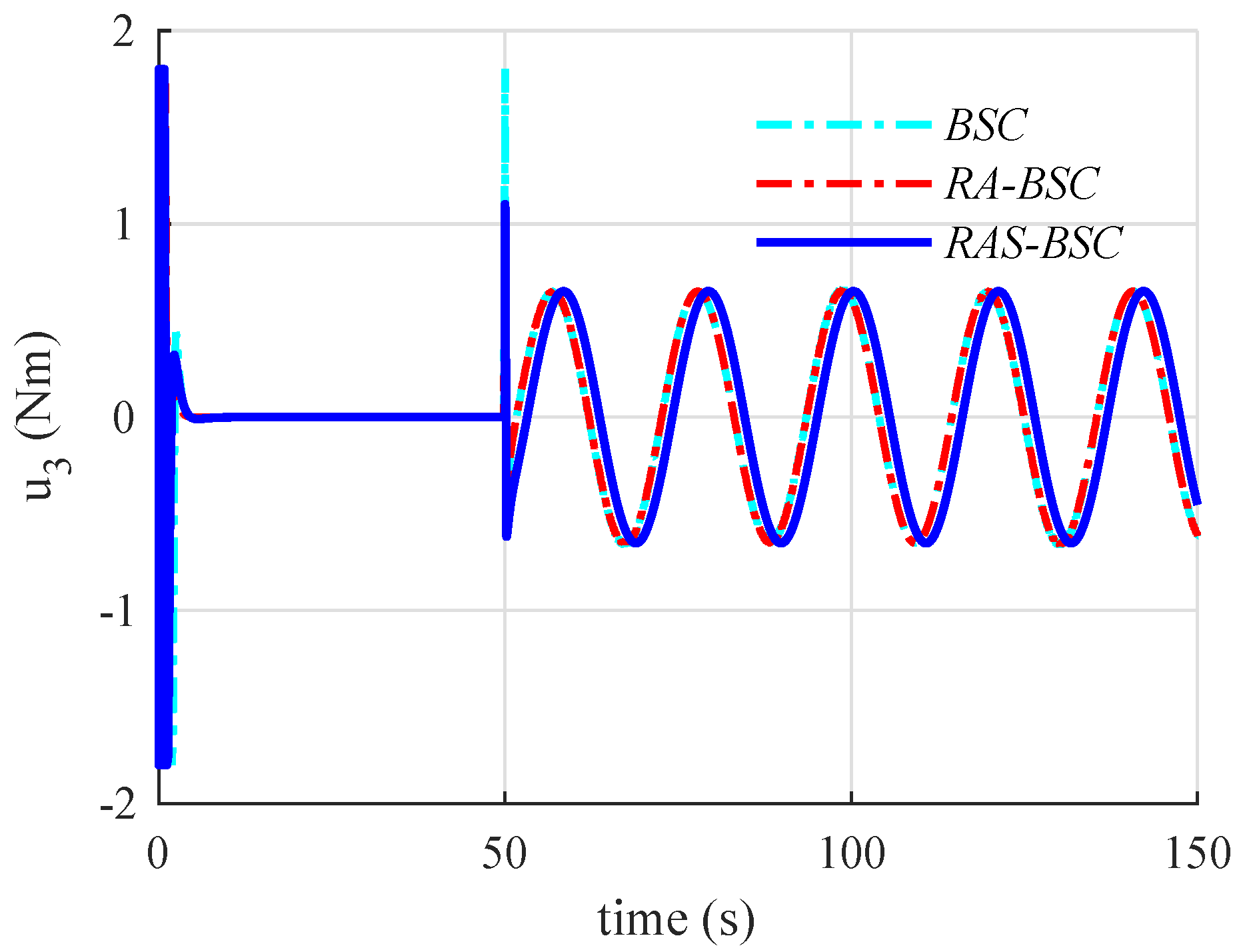
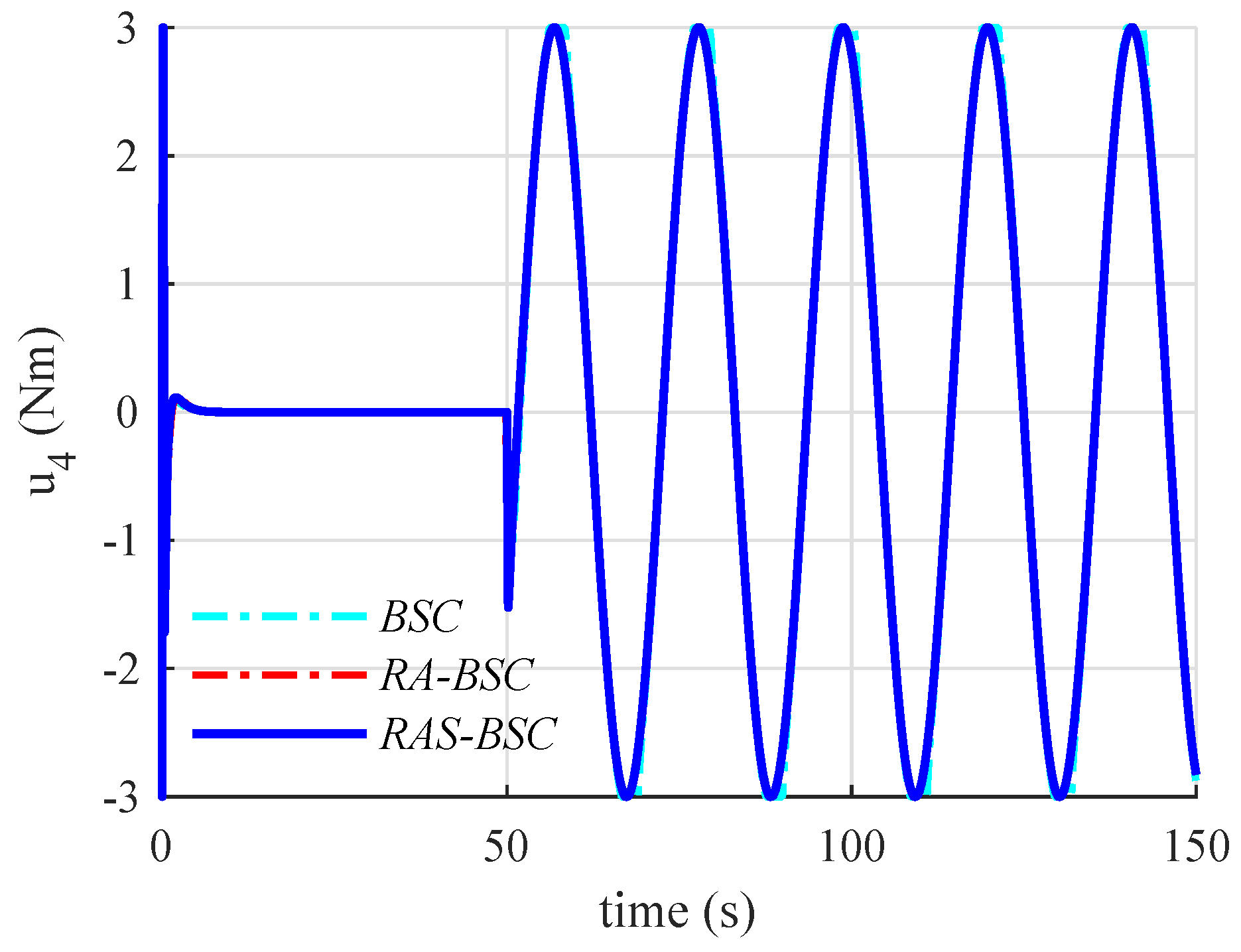
6.2. Simulation Results and Discussions
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bashi, O.I.D.; Hasan, W.Z.W.; Azis, N.; Shafie, S.; Wagatsuma, H. Unmanned aerial vehicle quadcopter: A review. J. Comput. Theor. Nanosci. 2016, 38, 529–554. [Google Scholar] [CrossRef]
- Özbek, N.S.; Önkol, M.; Efe, M.Ö. Feedback control strategies for quadrotor-type aerial robots: A survey. Trans. Inst. Meas. Control 2017, 14, 5663–5675. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.J. Trajectory tracking control of multirotors from modeling to experiments: A survey. Int. J. Control Autom. Syst. 2017, 15, 281–292. [Google Scholar] [CrossRef]
- Mung, N.X.; Hong, S.K. A Multicopter ground testbed for the evaluation of attitude and position controller. Int. J. Eng. Technol. 2018, 7, 65–73. [Google Scholar]
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Eng. Pract. 2016, 46, 26–36. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Quadcopter Robust Adaptive Second Order Sliding Mode Control Based on PID Sliding Surface. IEEE Access 2018, 6, 2169–3536. [Google Scholar]
- Kendoul, F. Nonlinear hierarchical flight controller for unmanned rotorcraft: Design, stability, and experiments. J. Guid. Control Dyn. 2009, 32, 1954–1958. [Google Scholar] [CrossRef]
- Zuo, Z.Y. Trajectory tracking control design with command-filtered compensation for a quadrotor. IET Control Theory Appl. 2010, 4, 2343–2355. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Xuan-Mung, N. Quadcopter Adaptive Trajectory Tracking Control: A New Approach via Backstepping Technique. Appl. Sci. 2019, 9, 3873. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, W.; Hong, S.; Lewis, F.L.; Yu, Y. Robust backstepping-based trajectory tracking control for quadrotors with time delays. IET Control Theory Appl. 2019, 13, 1945–1954. [Google Scholar] [CrossRef]
- Gao, H.; Chen, T. Network-based H∞ output tracking control. IEEE Trans. Autom. Control 2008, 53, 655–670. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. An integral predictive/nonlinear H infinity control structure for a quadrotor helicopter. Automatica 2010, 46, 29–39. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zheng, E.H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 1350–1356. [Google Scholar] [CrossRef] [PubMed]
- Shah, M.Z.; Samar, R.; Bhatti, A.I. Lateral track control of UAVs using the sliding mode approach: From design to flight testing. Trans. Inst. Meas. Control 2015, 37, 457–474. [Google Scholar] [CrossRef]
- Li, Z.; Deng, J.; Lu, R.; Xu, Y.; Bai, J.; Su, C.Y. Trajectory-tracking control of mobile robot systems incorporating neural-dynamic optimized model predictive approach. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 740–749. [Google Scholar] [CrossRef]
- Nascimento, T.P.; Saska, M. Position and attitude control of multi-rotor aerial vehicles: A survey. Annu. Rev. Control 2019, 48, 129–146. [Google Scholar] [CrossRef]
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.T.; Plosila, J. Swarms of Unmanned Aerial Vehicles—A Survey. IEEE J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Carrillo, L.R.G.; Vamvoudakis, K.G. Deep-Learning Tracking for Autonomous Flying Systems Under Adversarial Inputs. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Jafari, M.; Xu, H.; Carrillo, L.R.G. A neurobiologically-inspired intelligent trajectory tracking control for unmanned aircraft systems with uncertain system dynamics and disturbance. Trans. Inst. Meas. Control 2019, 41, 417–432. [Google Scholar] [CrossRef]
- Jafari, M.; Xu, H. Intelligent control for unmanned aerial systems with system uncertainties and disturbances using artificial neural network. Drones 2018, 2, 30. [Google Scholar]
- Wang, N.; Su, S.F.; Han, M.; Chen, W.H. Backpropagating constraints-based trajectory tracking control of a quadrotor with constrained actuator dynamics and complex unknowns. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 49, 1322–1337. [Google Scholar] [CrossRef]
- Chen, F.; Lei, W.; Zhang, K.; Tao, G.; Jang, B. A novel nonlinear resilient control for a quadrotor UAV via backstepping control and nonlinear disturbance observer. Nonlinear Dyn. 2016, 85, 1281–1295. [Google Scholar] [CrossRef]
- Yacef, F.; Bouhail, O.; Hamerlain, M.; Rizoug, N. Observer-based adaptive fuzzy backstepping tracking control of quadrotor unmanned aerial vehicle powered by li-ion battery. J. Intell. Robot. Syst. 2016, 84, 179–197. [Google Scholar] [CrossRef]
- Fang, X.; Wu, A.G.; Shang, Y.J.; Dong, N. A novel sliding mode controller for small-scale unmanned helicopters with mismatched disturbance. Nonlinear Dyn. 2016, 83, 1053–1068. [Google Scholar] [CrossRef]
- Yacef, F.; Bouhail, O.; Hamerlain, M.; Rizoug, N. Adaptive RBFNN/integral sliding mode control for a quadrotor aircraft. Neurocomputing 2016, 216, 126–134. [Google Scholar]
- Ahmed, N.; Chen, M. Sliding mode control for quadrotor with disturbance observer. Adv. Mech. Eng. 2018, 10, 1–16. [Google Scholar] [CrossRef]
- Rodr-guez-Mata, A.E.; Flores, G.; Mart-nez-Vásquez, A.H.; Mora-Felix, Z.D.; Castro-Linares, R.; Amabilis-Sosa, L.E. Discontinuous High-Gain Observer in a Robust Control UAV Quadrotor: Real-Time Application for Watershed Monitoring. Math. Probl. Eng. 2018, 2018, 4940360. [Google Scholar]
- Chen, M.; Xiong, S.; Wu, Q. Tracking Flight Control of Quadrotor Based on Disturbance Observer. In IEEE Transactions on Systems, Man, and Cybernetics: Systems; IEEE: Piscataway, NJ, USA, 2019; pp. 2168–2216. [Google Scholar]
- Shao, X.; Liu, J.; Cao, H.; Shen, C.; Wang, H. Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer. Int. J. Robust Nonlinear Control 2018, 28, 2700–2719. [Google Scholar] [CrossRef]
- Liu, H.; Li, D.; Yu, Y.; Zhong, Y. Robust trajectory tracking control of uncertain quadrotors without linear velocity measurements. IET Control Theory Appl. 2015, 9, 1746–1754. [Google Scholar] [CrossRef]
- Ma, D.; Xia, Y.; Li, T.; Chang, K. Active disturbance rejection and predictive control strategy for a quadrotor helicopter. IET Control Theory Appl. 2016, 10, 2213–2222. [Google Scholar] [CrossRef]
- Zou, Y. Trajectory tracking controller for quadrotors without velocity and angular velocity measurements. IET Control Theory Appl. 2017, 11, 101–109. [Google Scholar] [CrossRef]
- Tian, B.; Lu, H.; Zuo, Z.; Zong, Q.; Zhang, Y. Multivariable finite-time output feedback trajectory tracking control of quadrotor helicopters. Int. J. Robust Nonlinear Control 2017, 28, 281–295. [Google Scholar] [CrossRef]
- Shao, X.; Liu, J.; Wang, H. Robust backstepping output feedback trajectory tracking for quadrotors via extended state observer and sigmoid tracking differentiator. Mech. Syst. Signal Process. 2018, 104, 631–647. [Google Scholar] [CrossRef]
- He, M.; He, J. Extended State Observer-Based Robust Backstepping Sliding Mode Control for a Small-Size Helicopter. IEEE Access 2018, 6, 33480–33488. [Google Scholar] [CrossRef]
- Zarovy, S.; Costello, M. Extended state observer for helicopter mass and center-of-gravity estimation. J. Aircr. 2015, 52, 1939–1949. [Google Scholar] [CrossRef]
- Koria, D.K.; Kolhe, J.P.; Talole, S.E. Extended state observer based robust control of wing rock motion. Aerosp. Sci. Technol. 2014, 33, 107–117. [Google Scholar] [CrossRef]
- Wang, Q.; Ran, M.; Dong, C. Robust partial integrated guidance and control for missiles via extended state observer. ISA Trans. 2016, 65, 27–36. [Google Scholar] [CrossRef]
- Shao, X.; Wang, H. Back-stepping active disturbance rejection control design for integrated missile guidance and control system via reduced-order ESO. ISA Trans. 2015, 57, 10–22. [Google Scholar]
- Wei, Q.; Chen, M.; Wu, Q. Backstepping-based attitude control for a quadrotor UAV with input saturation and attitude constraints. Control Theory Appl. 2018, 10, 1361–1369. [Google Scholar]
- Cao, N.; Lynch, A.F. Inner—Outer Loop Control for Quadrotor UAVs With Input and State Constraints. IEEE Trans. Control Syst. Technol. 2016, 24, 1797–1804. [Google Scholar] [CrossRef]
- Faessler, M.; Falanga, D.; Scaramuzza, D. Thrust Mixing, Saturation, and Body-Rate Control for Accurate Aggressive Quadrotor Flight. IEEE Robot. Autom. Lett. 2017, 2, 476–482. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Tan, J. Adaptive and robust control of quadrotor aircrafts with input saturation. Nonlinear Dyn. 2017, 89, 255–265. [Google Scholar] [CrossRef]
- Jiang, T.; Lin, D.; Song, T. Finite-Time Backstepping Control for Quadrotors With Disturbances and Input Constraints. IEEE Access 2018, 6, 62037–62049. [Google Scholar] [CrossRef]
- Wang, X.; Su, X.; Sun, L. Disturbance observer-based singularity-free trajectory tracking control of uncertain quadrotors with input saturation. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 5780–5785. [Google Scholar]
- Huang, Y.; Zheng, Z.; Sun, L.; Zhu, M. Saturated adaptive sliding mode control for autonomous vessel landing of a quadrotor. IET Control Theory Appl. 2018, 12, 1830–1842. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, W.; Gong, X.; Wu, J. Simplified Attitude Determination Algorithm Using Accelerometer and Magnetometer with Extremely Low Execution Time. J. Sens. 2018, 2018, 8787236. [Google Scholar] [CrossRef] [Green Version]
- Celis, R.; Cadarso, L. Attitude Determination Algorithms through Accelerometers, GNSS Sensors, and Gravity Vector Estimator. Int. J. Aerosp. Eng. 2018, 2018, 5394057. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.K.; Wang, J.; Paw, Y.C.; Ng, T.Y. Tracking of a moving ground target by a quadrotor using a backstepping approach based on a full state cascaded dynamics. Appl. Soft Comput. 2017, 47, 47–62. [Google Scholar] [CrossRef]
- Mung, N.X.; Hong, S.K. Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles. Appl. Sci. 2019, 9, 2122. [Google Scholar] [CrossRef] [Green Version]
- Mung, N.X.; Hong, S.K. Robust Adaptive Formation Control of Quadcopters based on a Leader-Follower Approach. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Back-stepping control of electro-hydraulic system based on Extended-state-observer with plant dynamics largely unknown. IEEE Trans. Ind. Electron. 2016, 63, 6909–6920. [Google Scholar] [CrossRef]
- Song, B.; Hedrick, J.K. Dynamic Surface Control of Uncertain Nonlinear System; Springer-Verlag London Limited: London, UK, 2011; pp. 19–55. [Google Scholar]
- Flame Wheel ARF Kit. Available online: https://www.dji.com/kr/flame-wheel-arf/spec (accessed on 1 October 2019).
- DJI E305. Available online: http://www.dji.com/product/e305 (accessed on 1 October 2019).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit |
|---|---|---|
| m | kg | |
| kg·m | ||
| kg·m | ||
| kg·m | ||
| l | m | |
| g | m/s | |
| diag | ||
| diag | ||
| 30 | N | |
| 1.8 | Nm | |
| 1.8 | Nm | |
| 3 | Nm |
| Symbol | Value and Unit | Description |
|---|---|---|
| [20sin( t), 10sin( t), t] m | Trajectory reference | |
| Desired heading angle | ||
| m | Initial position | |
| m/s | Initial velocity | |
| Initial attitude | ||
| /s | Initial angular velocity | |
| ESO’s bandwidth | ||
| diag[] | Controller gains | |
| diag[] | Controller gains | |
| diag[] | Controller gains | |
| diag[] | Controller gains | |
| diag[] | Controller gains | |
| diag[] | Controller gains | |
| 1 | Controller gains | |
| 0.01 | LPF’s parameters |
| Controller | x-Position | y-Position | z-Position | Heading Angle |
|---|---|---|---|---|
| BSC | 9 s | 14 s | 23 s | 6 s |
| RA-BSC | 15 s | 24 s | 35 s | 9 s |
| RAS-BSC | 9 s | 19 s | 28 s | 6 s |
| Controller | x-Position | y-Position | z-Position | Heading Angle |
|---|---|---|---|---|
| BSC | m | m | m | |
| RA-BSC | m | m | m | |
| RAS-BSC | m | m | m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xuan-Mung, N.; Hong, S.K. Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer. Appl. Sci. 2019, 9, 5184. https://doi.org/10.3390/app9235184
Xuan-Mung N, Hong SK. Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer. Applied Sciences. 2019; 9(23):5184. https://doi.org/10.3390/app9235184
Chicago/Turabian StyleXuan-Mung, Nguyen, and Sung Kyung Hong. 2019. "Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer" Applied Sciences 9, no. 23: 5184. https://doi.org/10.3390/app9235184
APA StyleXuan-Mung, N., & Hong, S. K. (2019). Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer. Applied Sciences, 9(23), 5184. https://doi.org/10.3390/app9235184