Hybrid Model-Based Analysis of Underground Articulated Vehicles Steering Characteristics




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
- (1)
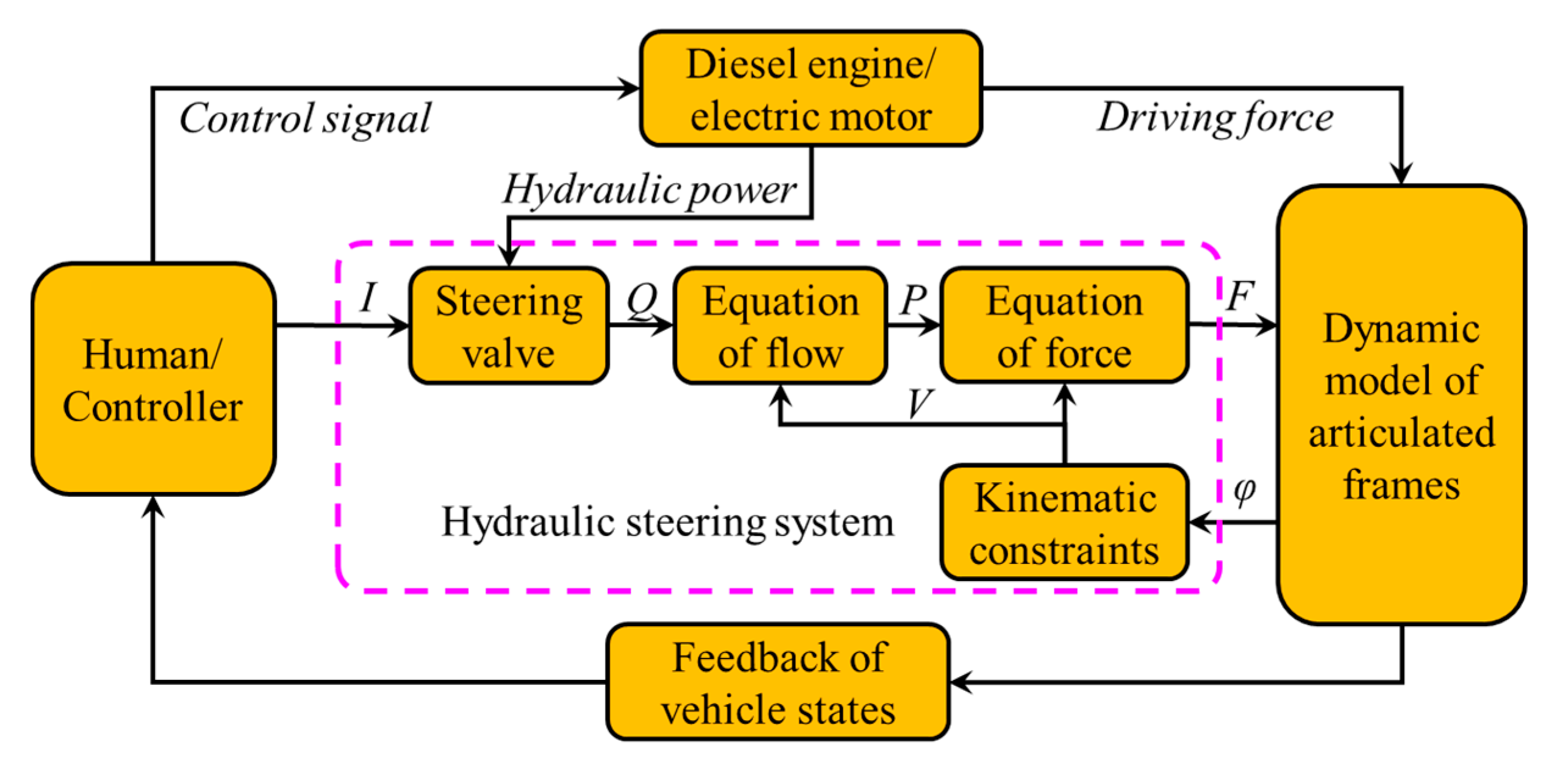
- A hybrid model including a dynamic model of articulated frames and a model of a hydraulic power steering system is established.
- (2)
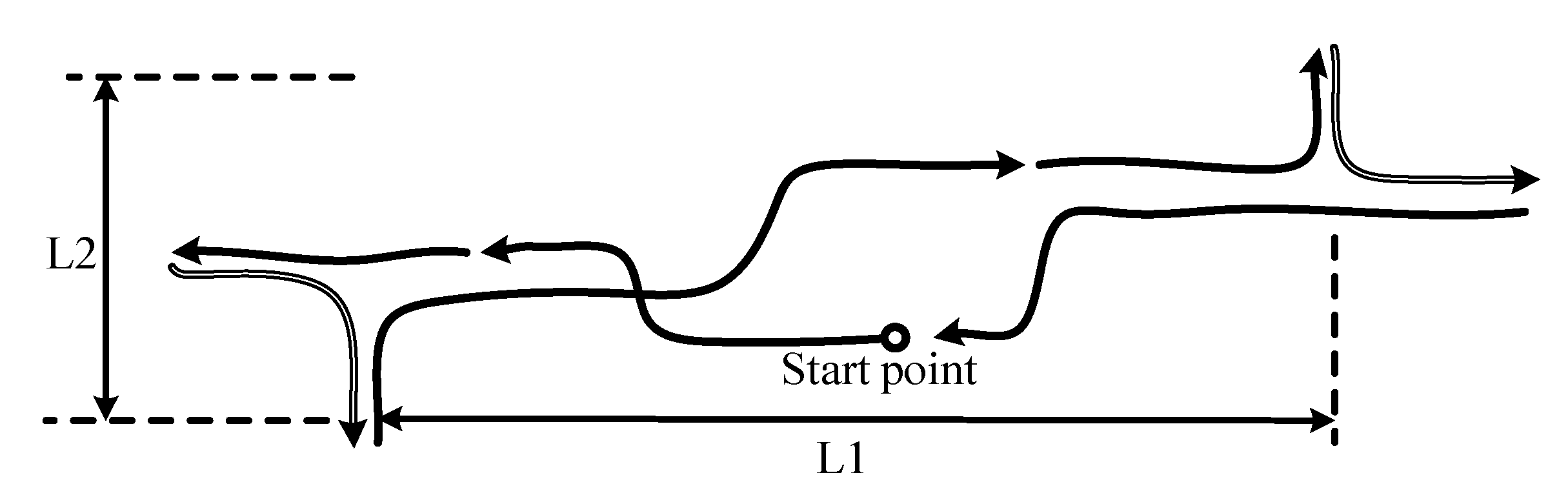
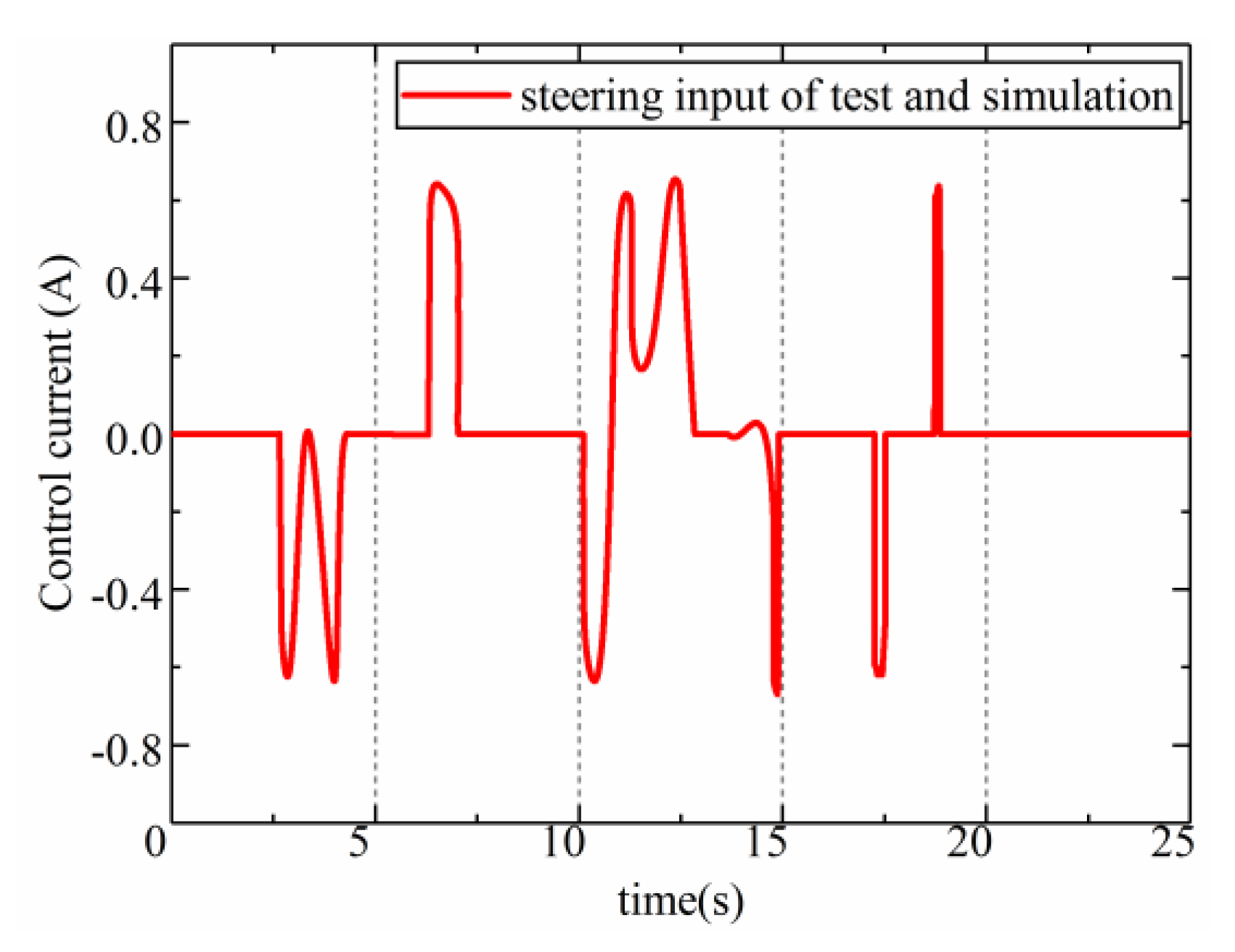
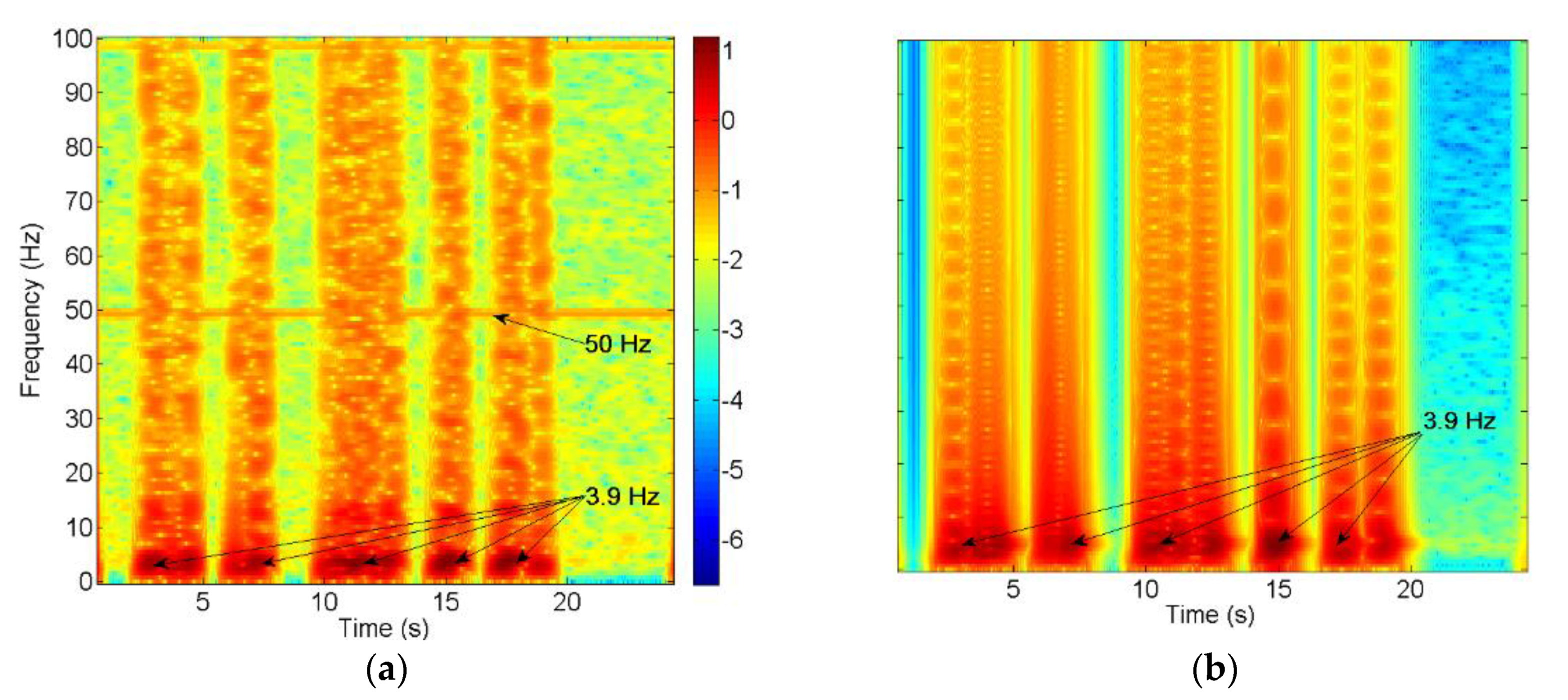
- A field test is carried out to verify the dynamic model in time and frequency domains.
- (3)
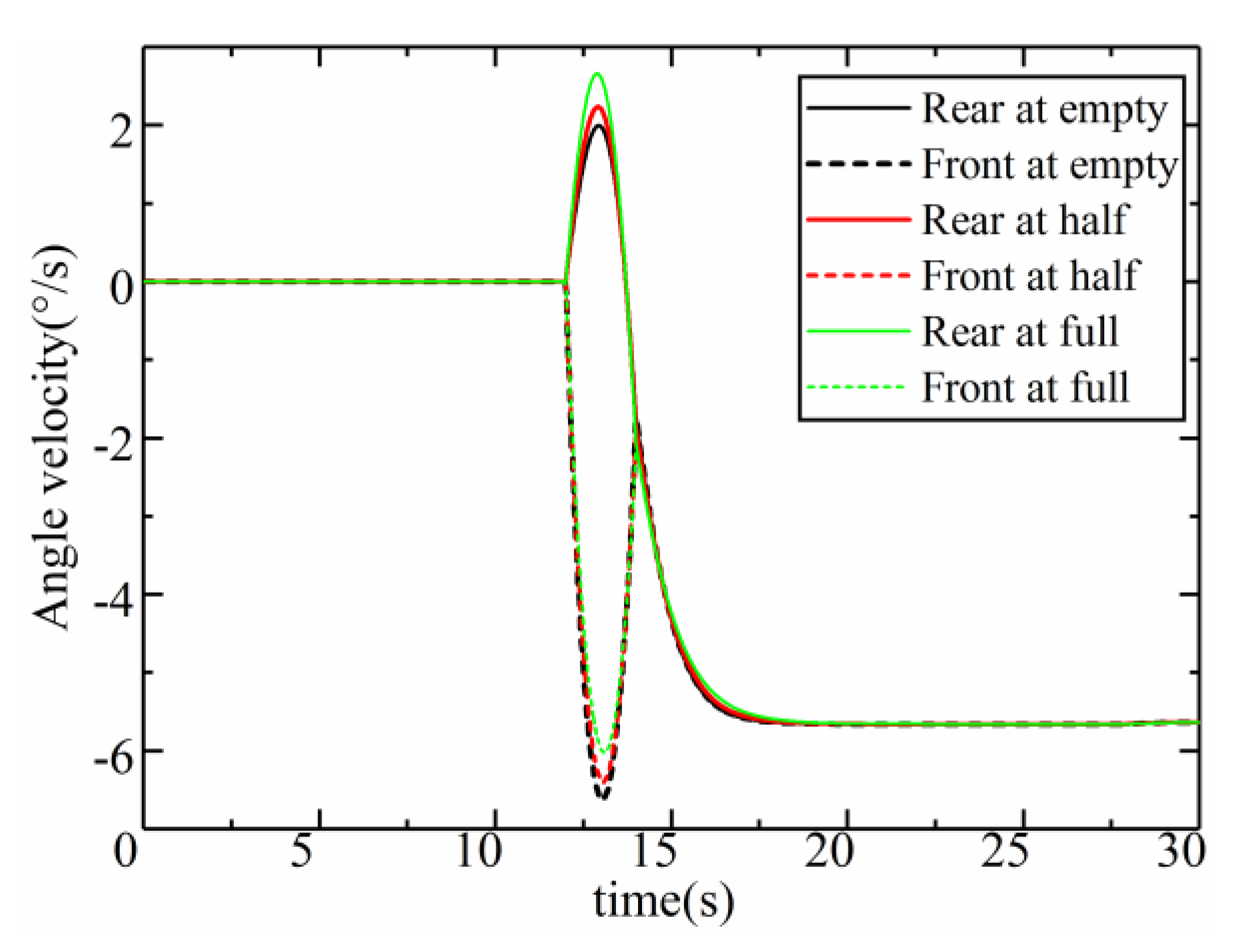
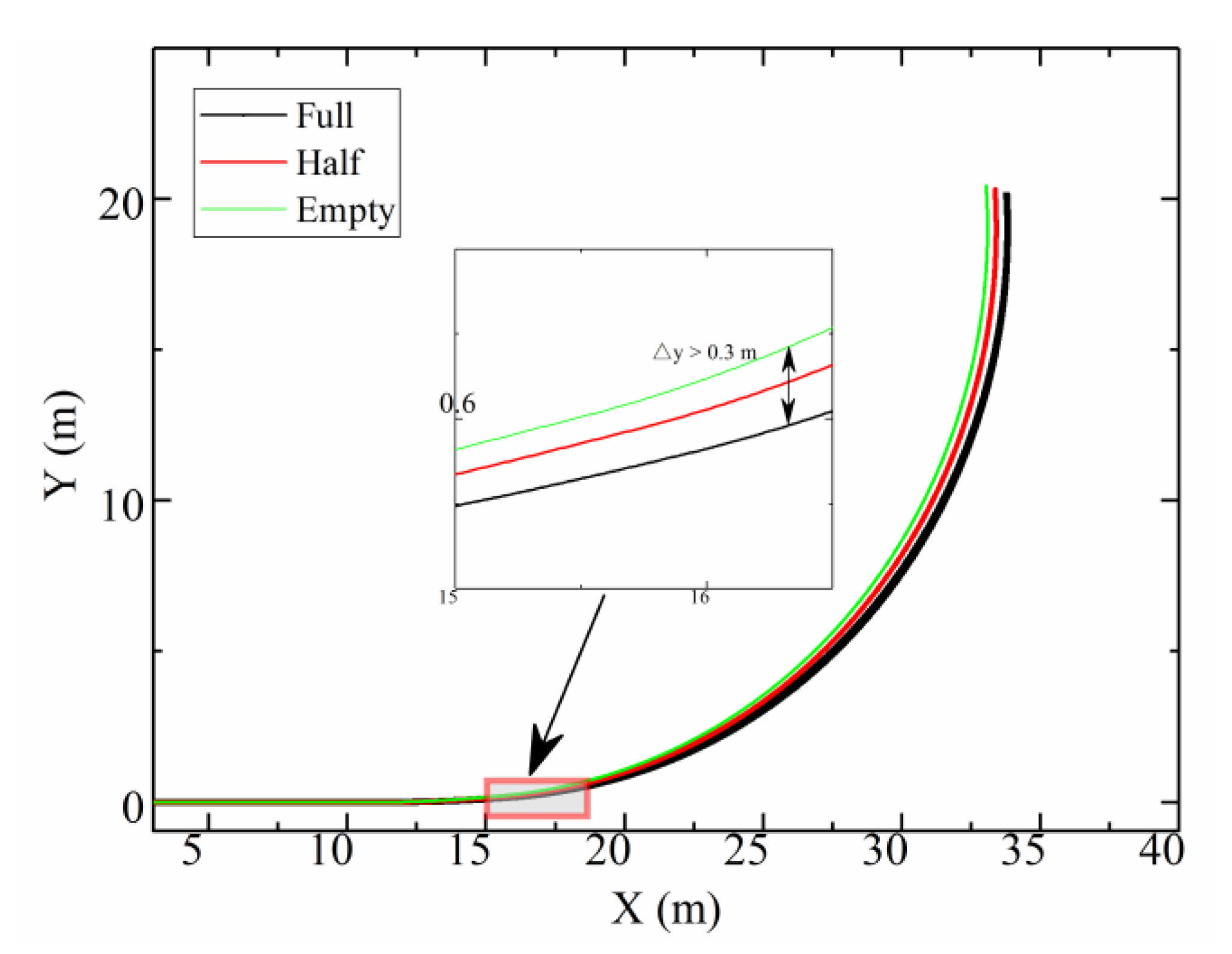
- The steering characteristics of a UAV, which involves the effects of load and velocity, are revealed based on the verified model.
2. Dynamic Model of UAVs
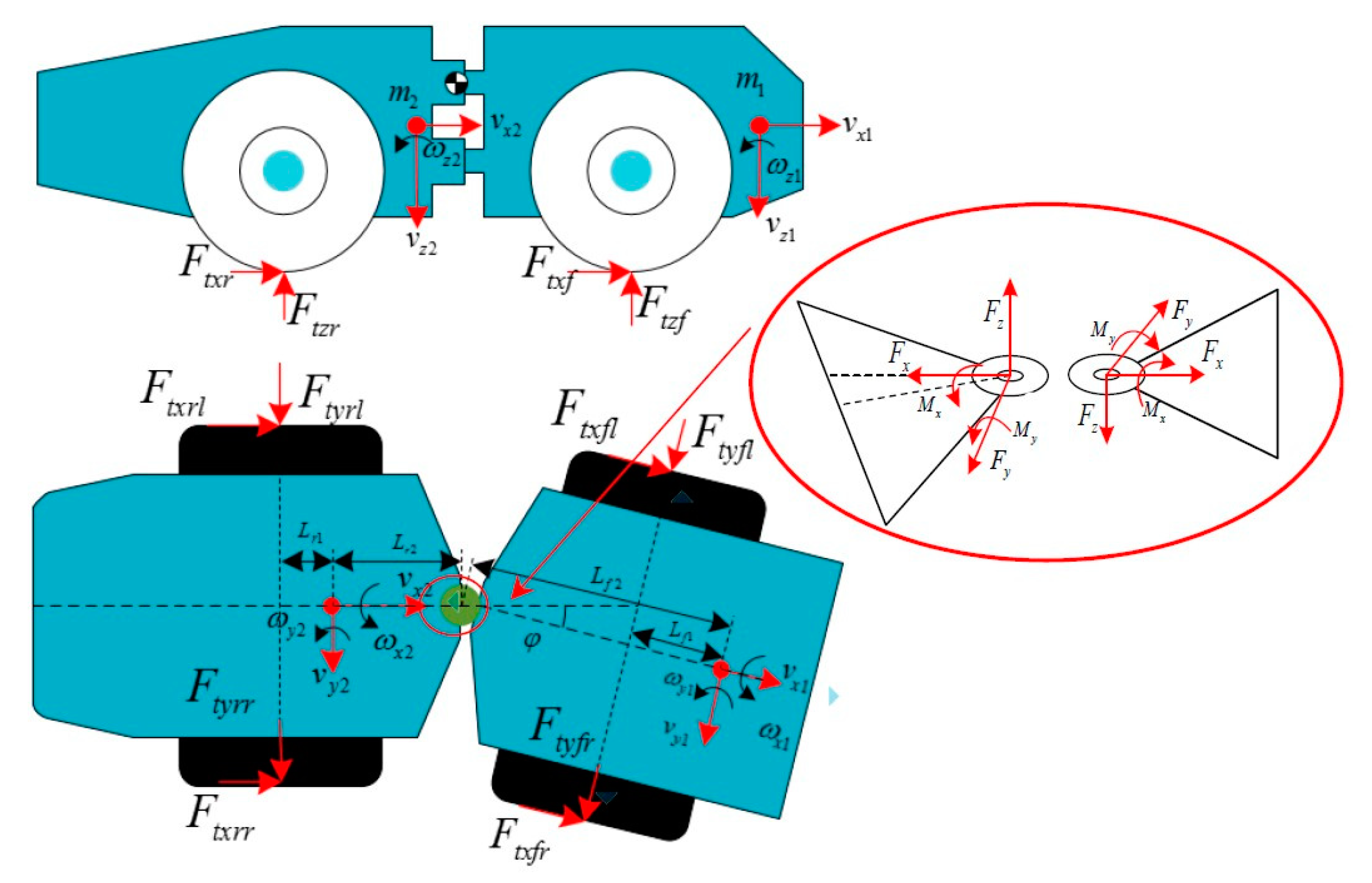
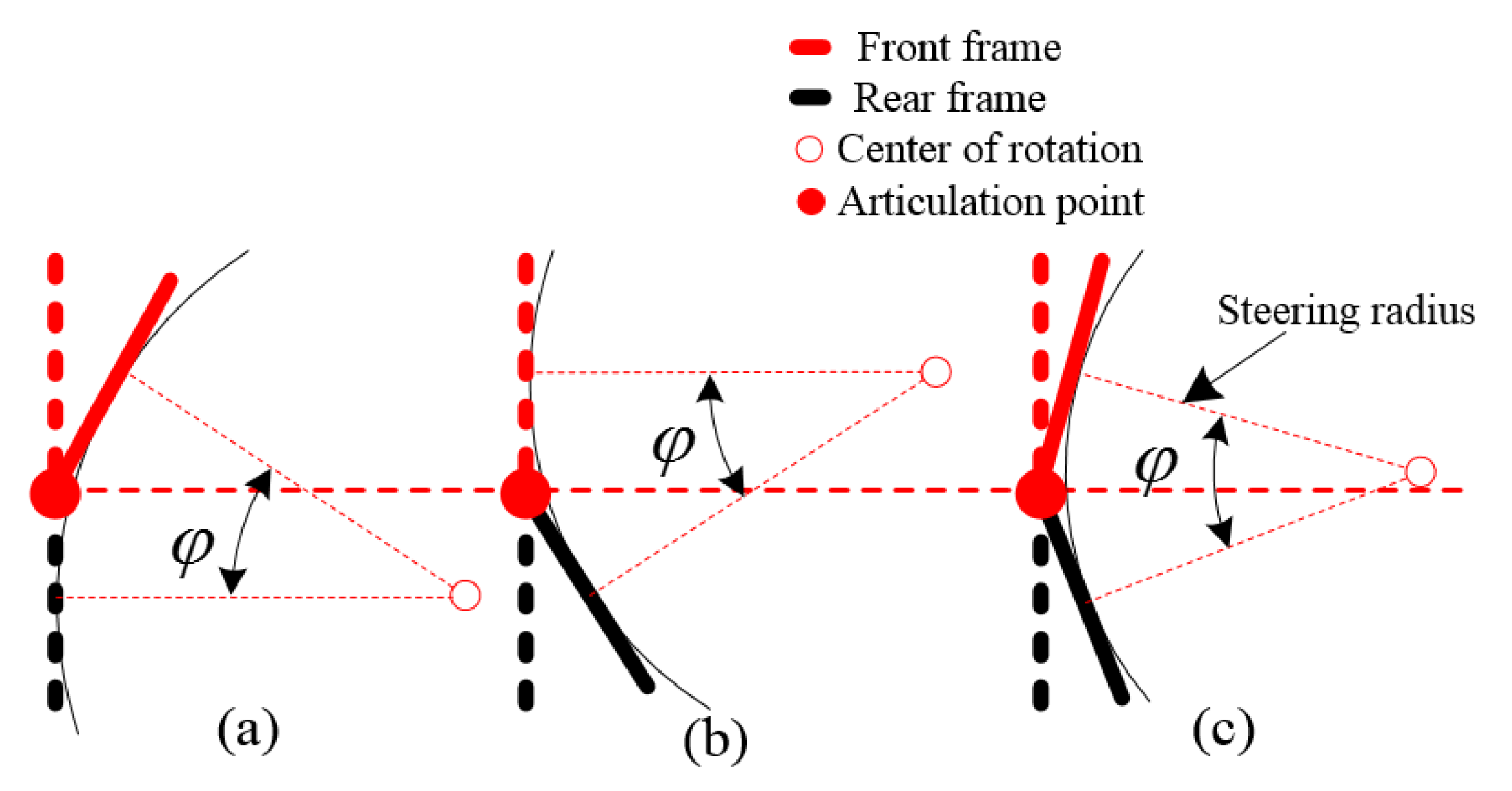
2.1. Dynamic Model of Vehicle Frames
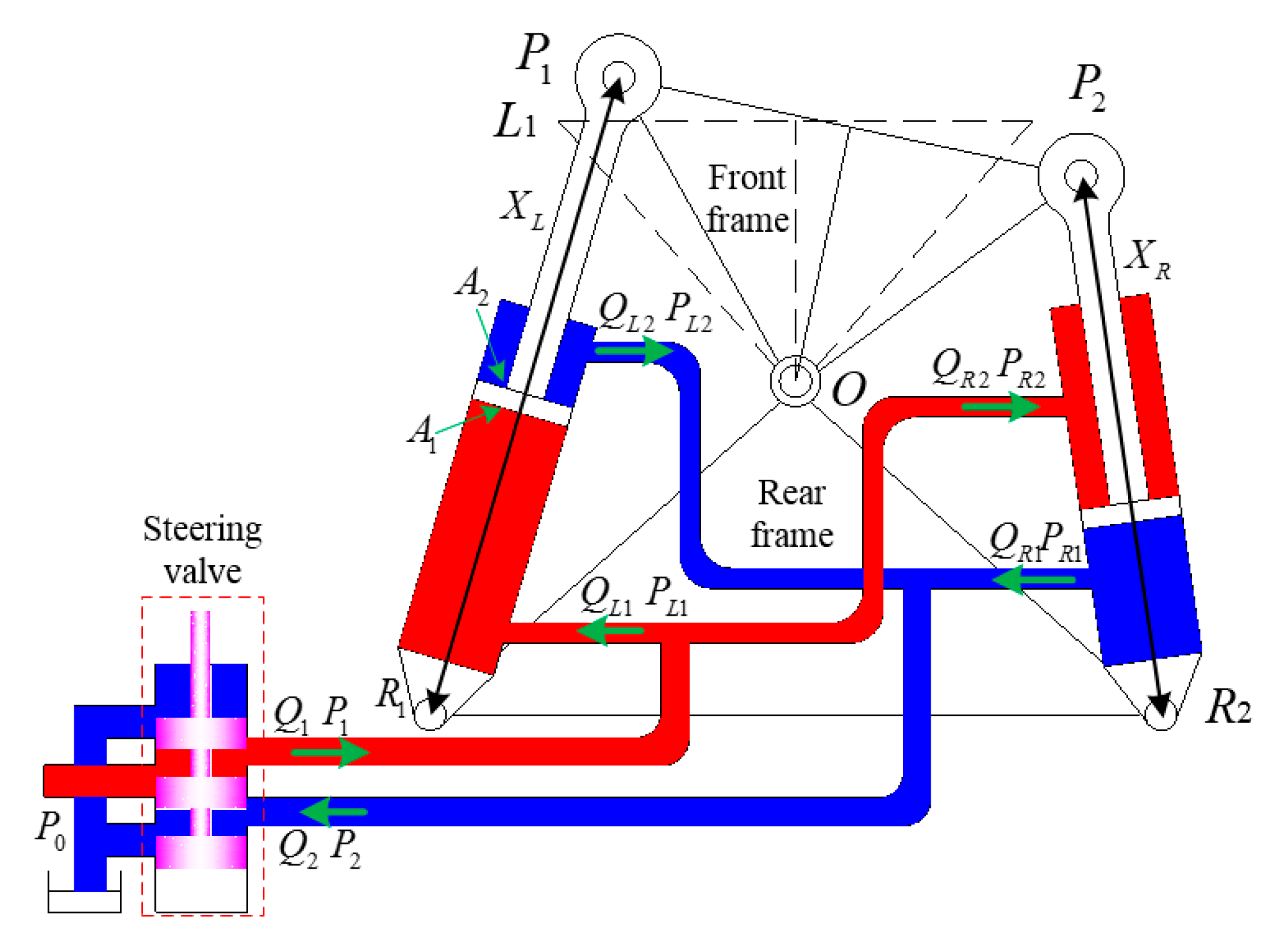
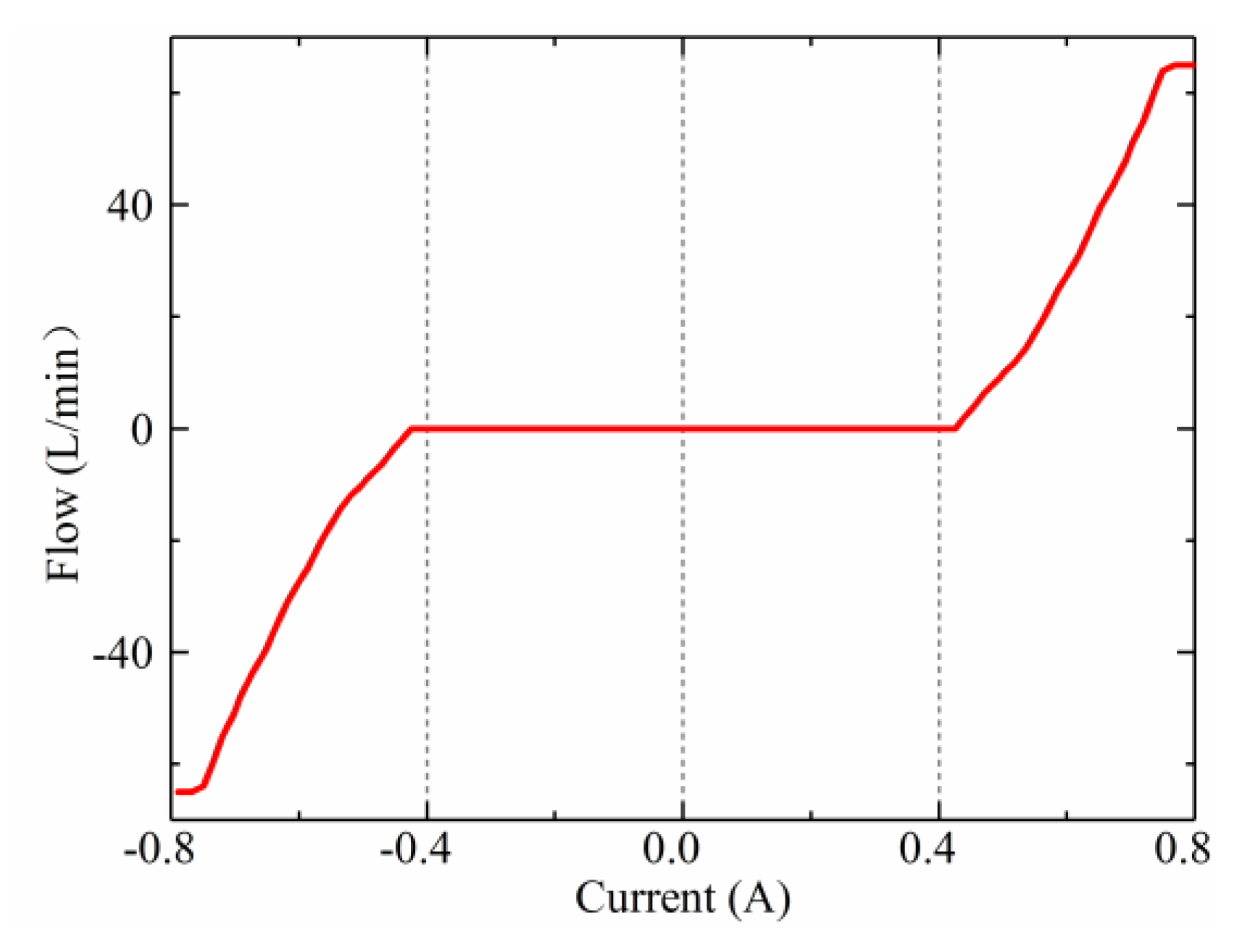
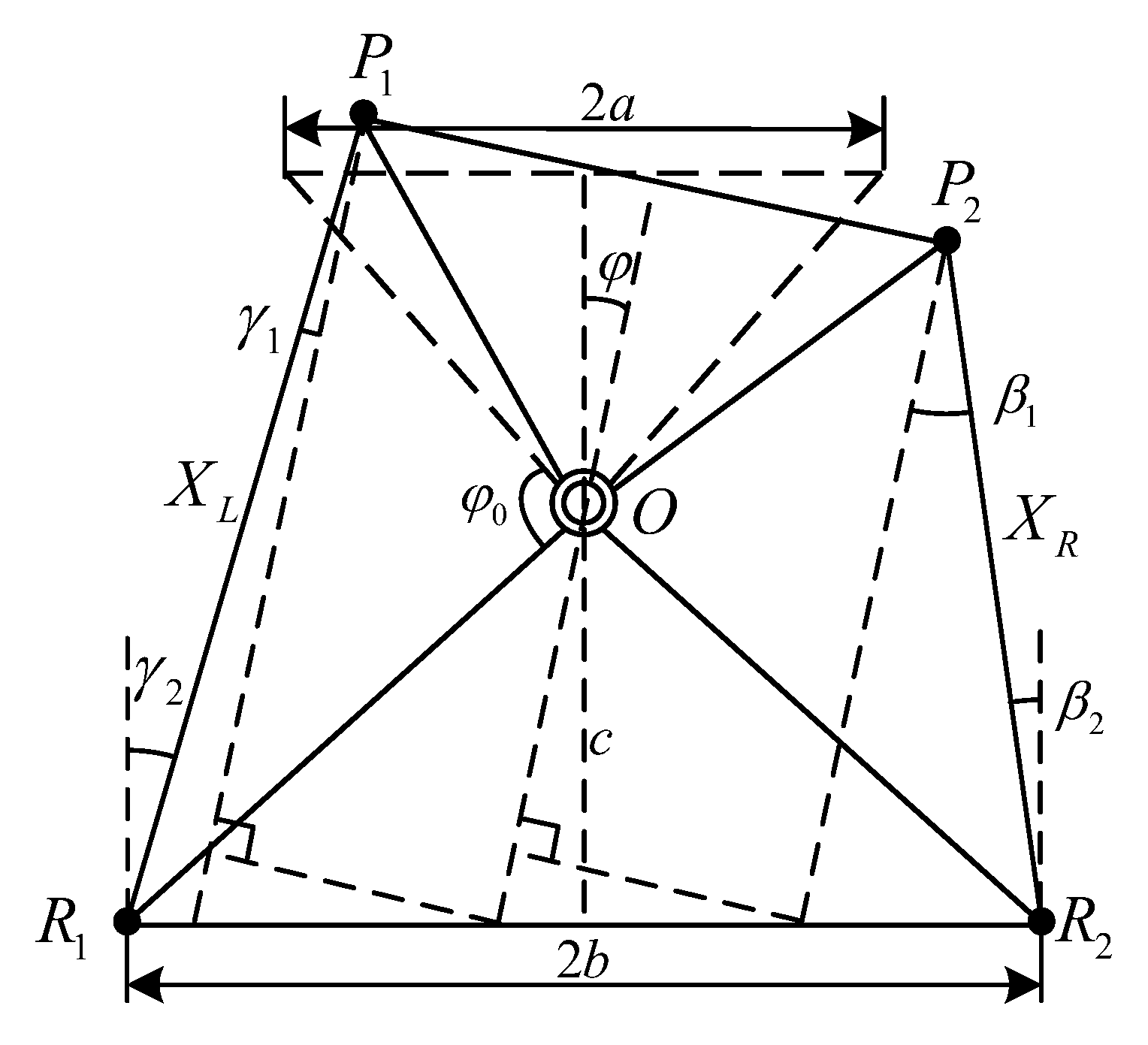
2.2. Model of Hydraulic Steering System
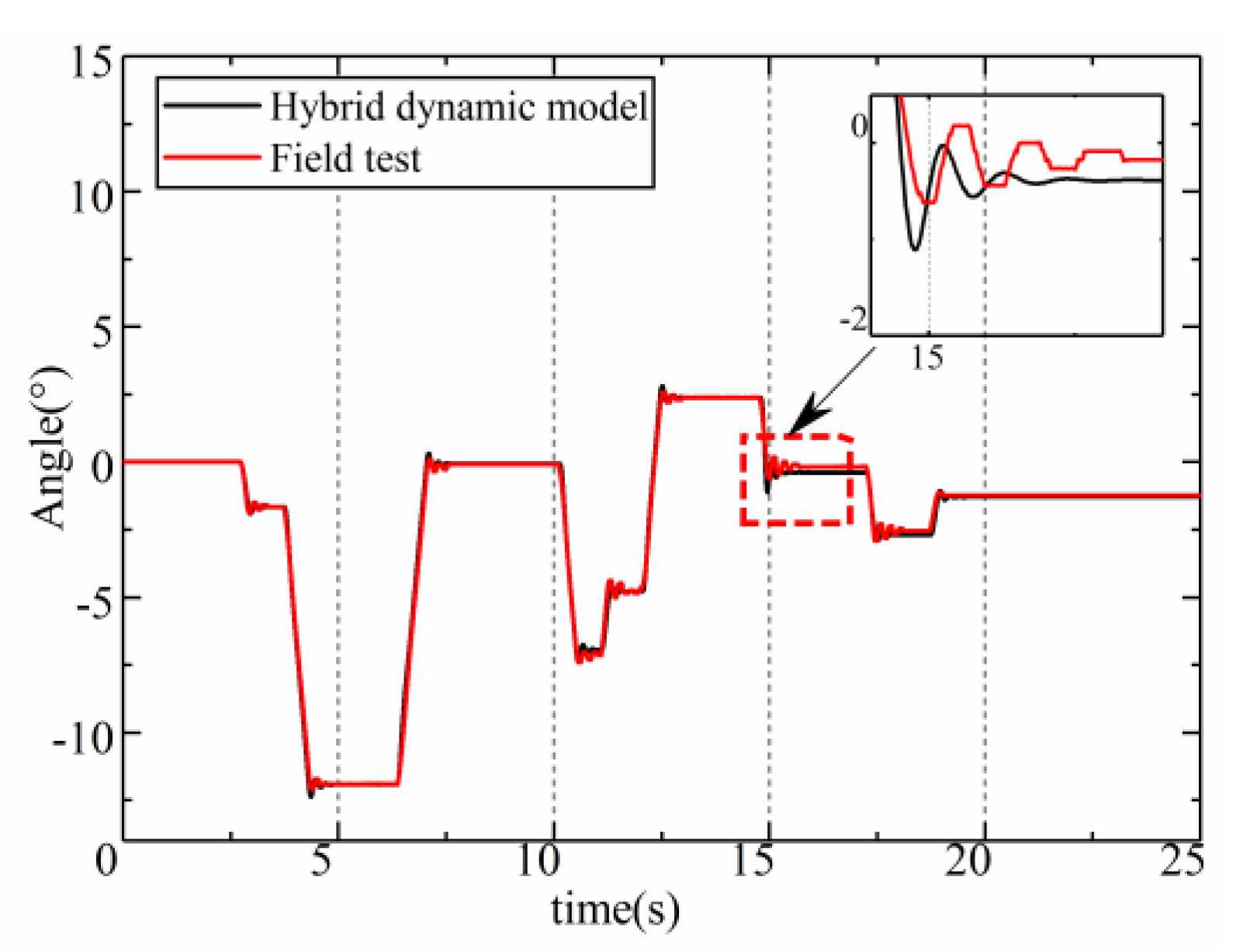
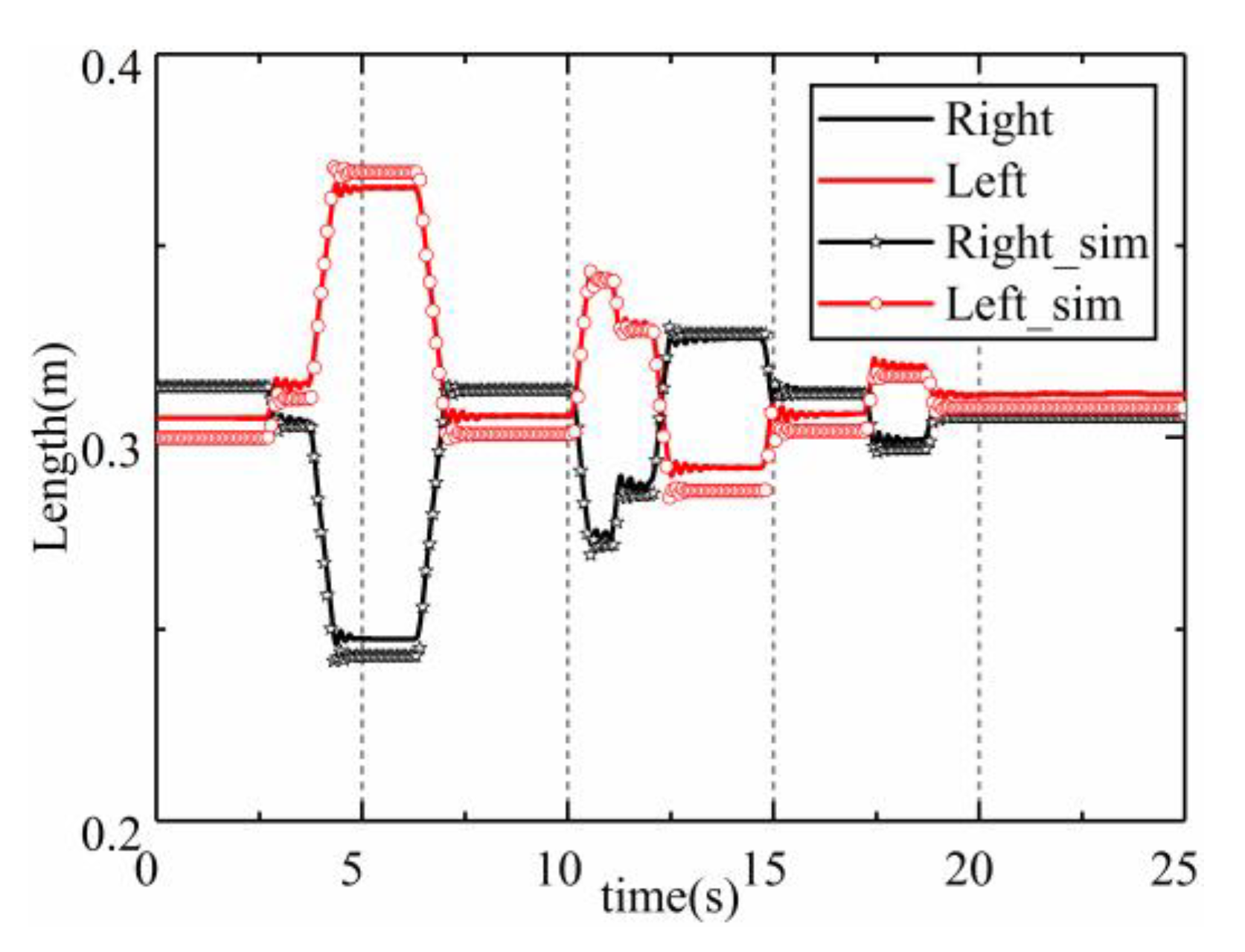
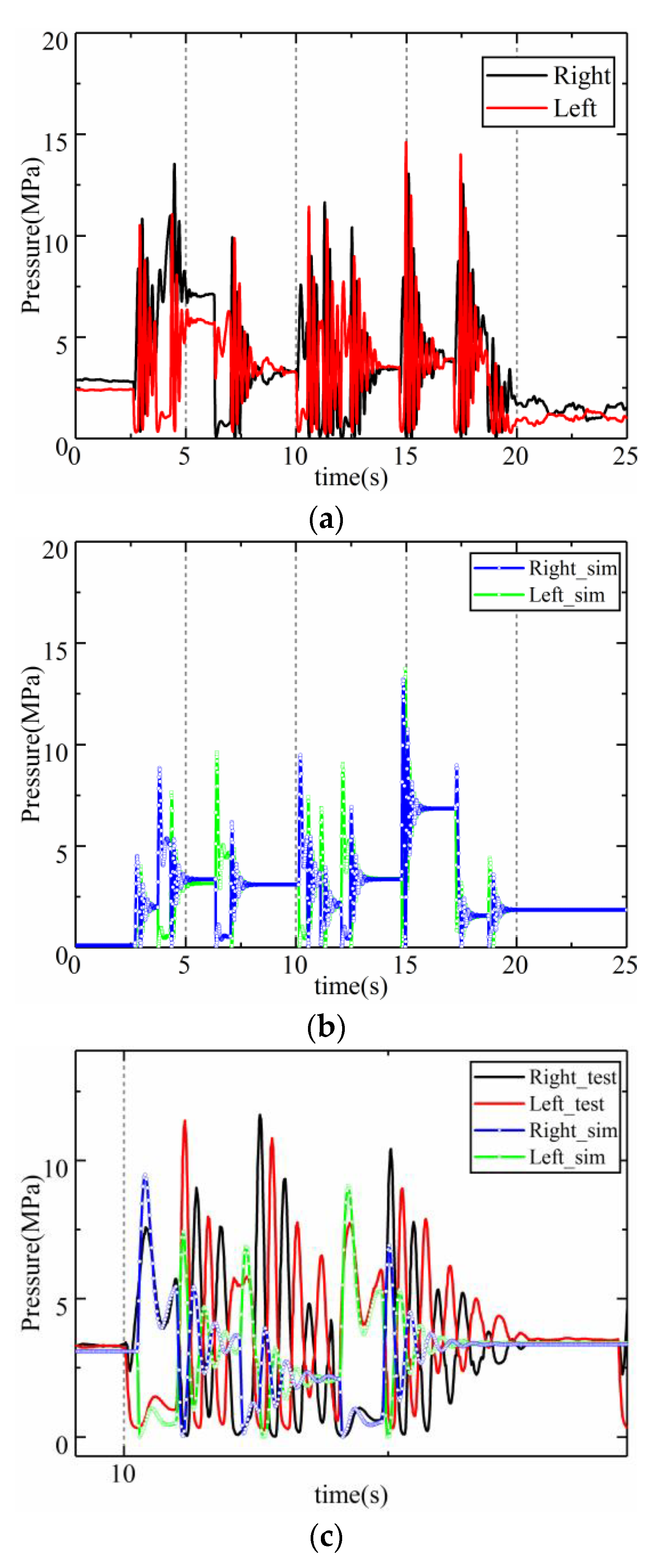
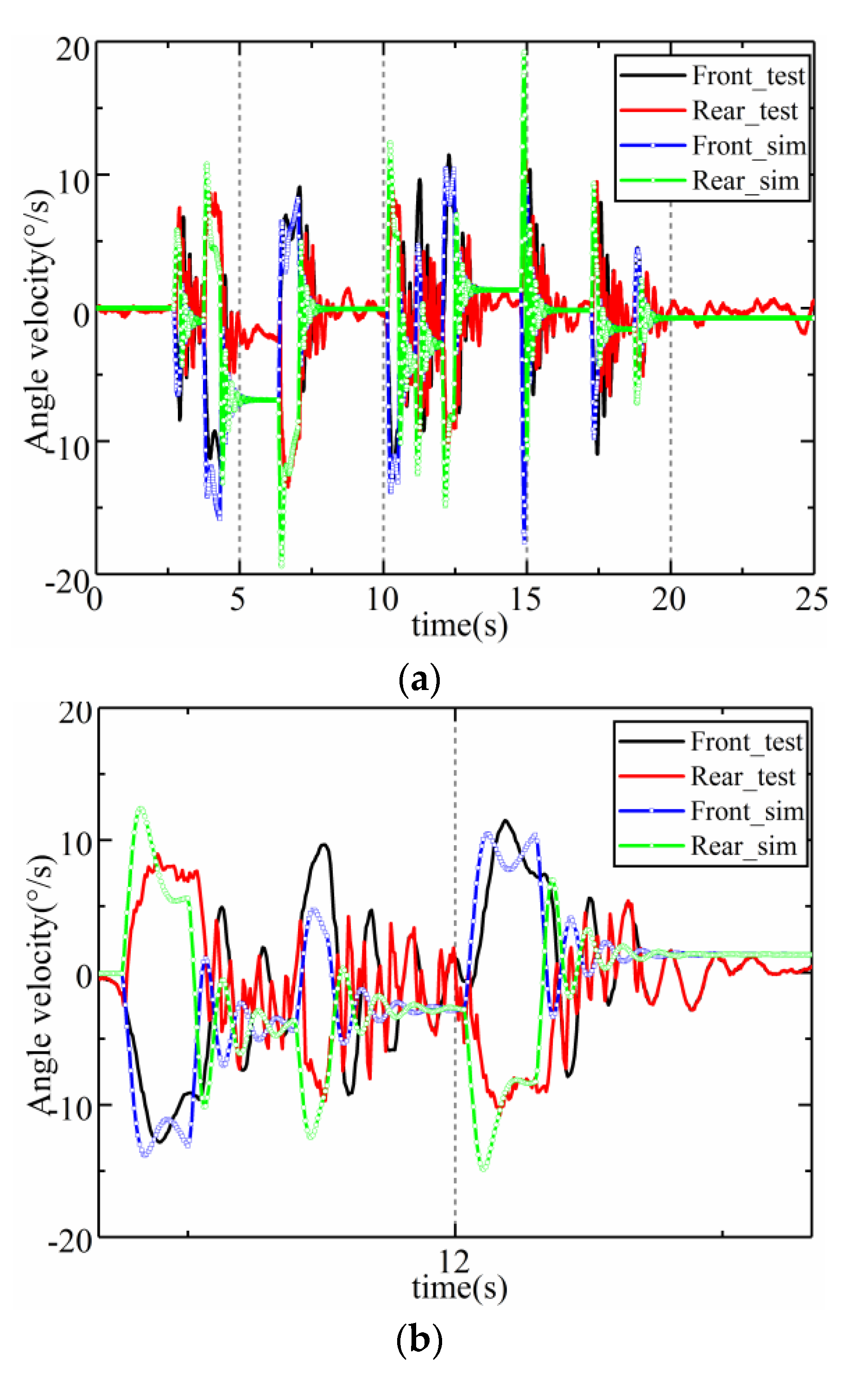
3. Validation of Dynamic Model
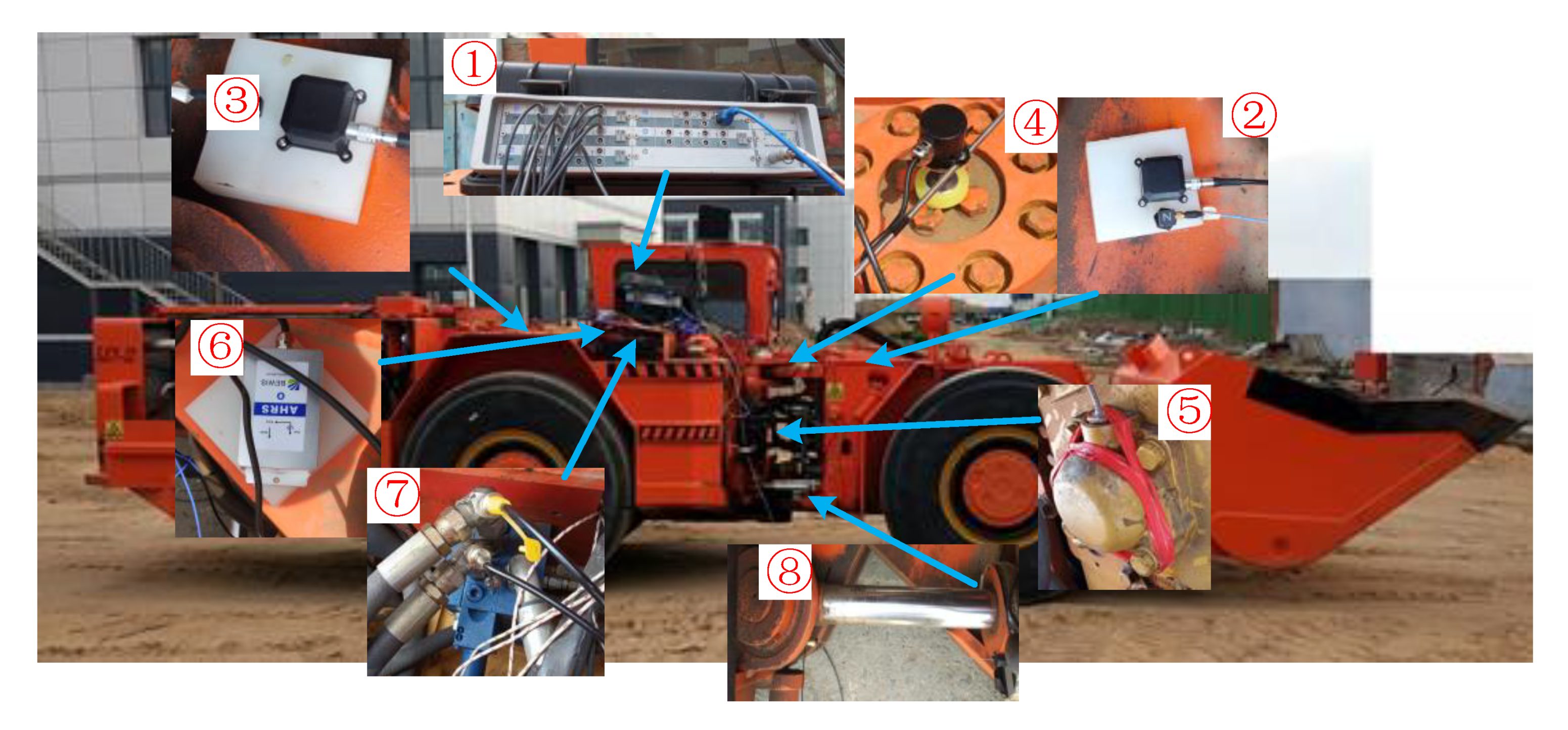
3.1. Field Test Setup
3.2. Discussion of Field Test Results
4. Analysis of Steering Characteristics
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, J.; Zhan, K. Intelligent Mining Technology for an Underground Metal Mine Based on Unmanned Equipment. Engineering 2018, 3, 381–391. [Google Scholar] [CrossRef]
- Gustafson, A.; Paraszczak, J.; Tuleau, J.; Schunnesson, H. Impact of technical and operational factors on effectiveness of automatic load-haul-dump machines. Min. Technol. 2017, 4, 185–190. [Google Scholar]
- Yin, Y.; Rakheja, S.; Boileau, P. Multi-performance analyses and design optimisation of hydro-pneumatic suspension system for an articulated frame-steered vehicle. Veh. Syst. Dyn. 2019, 57, 108–133. [Google Scholar] [CrossRef]
- Gao, Y.; Shen, Y.; Xu, T.; Zhang, W.; Güvenç, L. Oscillatory Yaw Motion Control for Hydraulic Power Steering Articulated Vehicles Considering the Influence of Varying Bulk Modulus. IEEE Trans. Control Syst. Technol. 2018, 99, 1–9. [Google Scholar] [CrossRef]
- Chun, J.T.L.Y. State Estimation of the Electric Drive Articulated Dump Truck Based on UKF. J. Harbin Inst. Technol. 2015, 6, 21–30. [Google Scholar]
- Tomiyama, H.; Iida, M.; Oh, T. Estimation of the Sideslip Angle of an Articulated Vehicle by an Observer. Eng. Agric. Environ. Food 2011, 3, 66–70. [Google Scholar] [CrossRef]
- Alshaer, B.J.; Darabseh, T.T.; Alhanouti, M.A. Path planning, modeling and simulation of an autonomous articulated heavy construction machine performing a loading cycle. Appl. Math. Model. 2013, 7, 5315–5325. [Google Scholar] [CrossRef]
- Ghabcheloo, R.; Hyvonen, M. Modeling and motion control of an articulated-frame-steering hydraulic mobile machine. In Proceedings of the 17th Mediterranean Conference on Control & Automation, Makedonia Palace, Thessaloniki, Greece, 24–26 June 2009; pp. 92–97. [Google Scholar]
- Altafini, C.A. Path-Tracking Criterion for an LHD Articulated Vehicle. Int. J. Robot. Res. 1999, 5, 435–441. [Google Scholar] [CrossRef]
- He, Y.; Khajepour, A.; Mcphee, J.; Wang, X. Dynamic modelling and stability analysis of articulated frame steer vehicles. Int. J. Heavy Veh. Syst. 2005, 1, 28–59. [Google Scholar] [CrossRef]
- Marshall, J.; Barfoot, T.; Larsson, J. Autonomous underground tramming for center-articulated vehicles. J. Field Robot. 2008, 25, 400–421. [Google Scholar] [CrossRef]
- Dissanayake, G.; Sukkarieh, S.; Nebot, E.; Durrant-Whyte, H. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications. IEEE Trans. Robot. Autom. 2001, 5, 731–747. [Google Scholar] [CrossRef] [Green Version]
- Horton, D.N.L.; Crolla, D.A. Theoretical Analysis of the Steering Behaviour of Articulated Frame Steer Vehicles. Veh. Syst. Dyn. 1986, 4, 211–234. [Google Scholar] [CrossRef]
- Azad, N.L.; Khajepour, A.; Mcphee, J. Effects of locking differentials on the snaking behaviour of articulated steer vehicles. Int. J. Veh. Syst. Model. Test. 2007, 2, 101–127. [Google Scholar] [CrossRef]
- Lashgarian Azad, N.; Khajepour, A.; Mcphee, J. Robust state feedback stabilization of articulated steer vehicles. Veh. Syst. Dyn. 2007, 3, 249–275. [Google Scholar] [CrossRef]
- Pazooki, A.; Rakheja, S.; Cao, D. Kineto-dynamic directional response analysis of an articulated frame steer vehicle. Int. J. Veh. Des. 2014, 1, 1–29. [Google Scholar] [CrossRef]
- Nayl, T.; Nikolakopoulos, G.; Gustfsson, T. Switching model predictive control for an articulated vehicle under varying slip angle. In Proceedings of the 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 890–895. [Google Scholar]
- Nayl, T.; Nikolakopoulos, G.; Gustafsson, T. Effect of kinematic parameters on MPC based on-line motion planning for an articulated vehicle. Robot. Auton. Syst. 2015, 70, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Ma, B. Path Tracking of Mining Vehicles Based on Nonlinear Model Predictive Control. Appl. Sci. 2019, 7, 1372. [Google Scholar] [CrossRef] [Green Version]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Li, K. A New Path Tracking Method Based on Multilayer Model Predictive Control. Appl. Sci. 2019, 13, 2649. [Google Scholar] [CrossRef] [Green Version]
- Hb, P. Tire and Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar]
- Pan, Q.; Li, Y.; Huang, M.; Zhao, Z.; Ma, P.; Ma, J. Estimation of dynamic behaviors of hydraulic forging press machine in slow-motion manufacturing process. Nonlinear Dyn. 2019, 1, 339–362. [Google Scholar] [CrossRef]
- Ahmed, H.; Tahir, M. Accurate Attitude Estimation of a Moving Land Vehicle Using Low-Cost MEMS IMU Sensors. IEEE Trans. Intell. Transp. Syst. 2017, 7, 1723–1739. [Google Scholar] [CrossRef]

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, L.; Jin, C.; Liu, Y.; Ma, F.; Feng, Z. Hybrid Model-Based Analysis of Underground Articulated Vehicles Steering Characteristics. Appl. Sci. 2019, 9, 5274. https://doi.org/10.3390/app9245274
Gao L, Jin C, Liu Y, Ma F, Feng Z. Hybrid Model-Based Analysis of Underground Articulated Vehicles Steering Characteristics. Applied Sciences. 2019; 9(24):5274. https://doi.org/10.3390/app9245274
Chicago/Turabian StyleGao, Lulu, Chun Jin, Yuchao Liu, Fei Ma, and Zhipeng Feng. 2019. "Hybrid Model-Based Analysis of Underground Articulated Vehicles Steering Characteristics" Applied Sciences 9, no. 24: 5274. https://doi.org/10.3390/app9245274
APA StyleGao, L., Jin, C., Liu, Y., Ma, F., & Feng, Z. (2019). Hybrid Model-Based Analysis of Underground Articulated Vehicles Steering Characteristics. Applied Sciences, 9(24), 5274. https://doi.org/10.3390/app9245274