1. Introduction
Landing gear retraction systems are safety devices that guarantee the retraction action and locking capability in the retracted state of landing gear after aircraft take off as well as the extension action and locking capability in the deployed state prior to landing [
1]. According to a Federal Aviation Administration (FAA) investigation report [
2] and Boeing’s Statistical Summary of Commercial Jet Airplane Accidents [
3], a considerable portion of landing gear failures are caused by failures of the retraction mechanism, in which lock mechanism failures are prevalent. The main failure modes include the locking failure, unlocking failure, and automatic unlocking of landing gear. Thus, the rational design of landing gear lock mechanisms and the analysis of locking performance are critical to the safe and reliable operation of the landing gear retraction system [
4].
Earlier methods of designing landing gear lock mechanisms were often based on empirical modification and experimental verification. Such design patterns were procedurally cumbersome, causing high repetition rates and long cycles of design as well as high costs of development [
5]. With the advancement of digital mockup technology [
6], multidisciplinary co-simulation has become the mainstream method of lock mechanism design [
7]. Lei [
8] proposed a multidisciplinary co-simulation-based method for analyzing a system with a hydromechatronically coupled landing gear lock mechanism. The method allowed preferential analysis of the fault mechanism and fast implementation of fault diagnosis. Tian [
9] and Ji [
10] created co-simulation models of landing gear retraction dynamics with a hook lock and a linkage lock separately based on the Siemens Virtual.Lab Motion (Siemens, Berlin, Germany) and Siemens Imagine.Lab AMESim (Siemens, Berlin, Germany) and explored the effects of lock mechanism motion on the dynamic properties of the retraction system. After modeling the double-lock bar mechanism of a certain unmanned aerial vehicle (UAV) in Adams, Oh [
11] analyzed the intersection load and stress level of the lock bars.
However, virtual prototypes and digital simulation technology also have severe limitations regarding the design of complex mechanisms, which are reflected in the following two aspects. One aspect involves handling changes in the stability characteristics of mechanical systems. The majority of today’s landing gear lock mechanisms (regardless of whether they employ hook or linkage locks) [
1] jump instantaneously from an unstable state to a stable locked state at the moment of locking. In such a state, the lock mechanism cannot be unlocked without the unlocking device. This is also the case for the unlocking process. Prior to the advent of bifurcation theory, it was impossible to explain the jump phenomenon of lock mechanisms by only simulative or experimental means. Accordingly, it was also difficult to analyze the conditions and influencing factors of the lock jump from the mechanism perspective, which greatly restricted the design level of lock mechanisms. In fact, the lock jump phenomenon can be well explained by bifurcation theory. The lock mechanism bifurcates in the critical unstable state to reach a stable locked state from an unstable unlocked state or to reach a stable unlocked state from an unstable locked state [
12]. The other aspect involves handling the system of complex nonlinear mechanisms. To analyze the instability characteristics of lock mechanisms, virtual simulation technology needs to employ a dynamic perturbation method for acquisition of the characteristics. If a parameter influence analysis is required, substantial iterative computations are needed, which are heavily burdensome. Therefore, virtual simulation technology can hardly offer fast, effective support for the selection of various key parameters in the early phase of mechanism design. In contrast, a combination of numerical continuation and bifurcation analysis can derive the steady changes in a nonlinear system according to the changing control parameters in a fast and accurate manner [
13]. The combined method can optimize the design process of complex mechanisms greatly and shorten their development time, which can be a powerful analytical tool for use in the early stage of aircraft research and development (R&D).
Bifurcation theory has been applied in the aviation field for many years, mainly around a number of nonlinear dynamic problems such as the ground stability of aircraft taxiing [
14,
15], the flight stability of aircrafts [
16,
17], and the performance of complex lock mechanisms [
18]. Regarding existing research of landing gear lock mechanisms, Knowles [
12] was the first to use the numerical continuation algorithm combined with bifurcation theory for studying the performance of a certain landing gear lock linkage mechanism. As shown by the study, saddle node bifurcation appeared in the equilibrium solution, which corresponded to the unstable jump point of the lock mechanism, as presented in the dynamics results obtained when the lock mechanism was near the locking phase. This, in turn, explained the locking mechanism of the landing gear. Later, Knowles also analyzed the performance bifurcation characteristics of different lock mechanisms by targeting an integrated nose landing gear (NLG) with a combined uplock/downlock mechanism [
19,
20], a spatial single-sidestay main landing gear (MLG) mechanism [
21] and a dual-sidestay MLG mechanism [
22] and explored the influences of the spring parameters on the lock mechanism performance. In a study conducted by Yin [
23], the locking and unlocking mechanisms of linkage locks were investigated, and the critical unlocking force was optimized.
Existing studies focus only on analyzing the bifurcation characteristics of linkage lock mechanisms, while the performance of the hook locks examined in this paper has never been studied. Compared to linkage locks, hook locks are structurally more complicated, so it is more difficult to analyze relevant motion mechanisms. In this paper, a numerical continuation algorithm and bifurcation theory are employed to study the hook lock mechanism and to elucidate the locking principle of hook locks. Further, the influences of the landing gear weight and lock spring parameters on the performance of the lock mechanism are explored, and the minimum unlocking force of the lock mechanism is optimized, thereby establishing a novel bifurcation theory-based method for designing and analyzing hook locks for landing gear.
2. System Modeling
2.1. Research Object
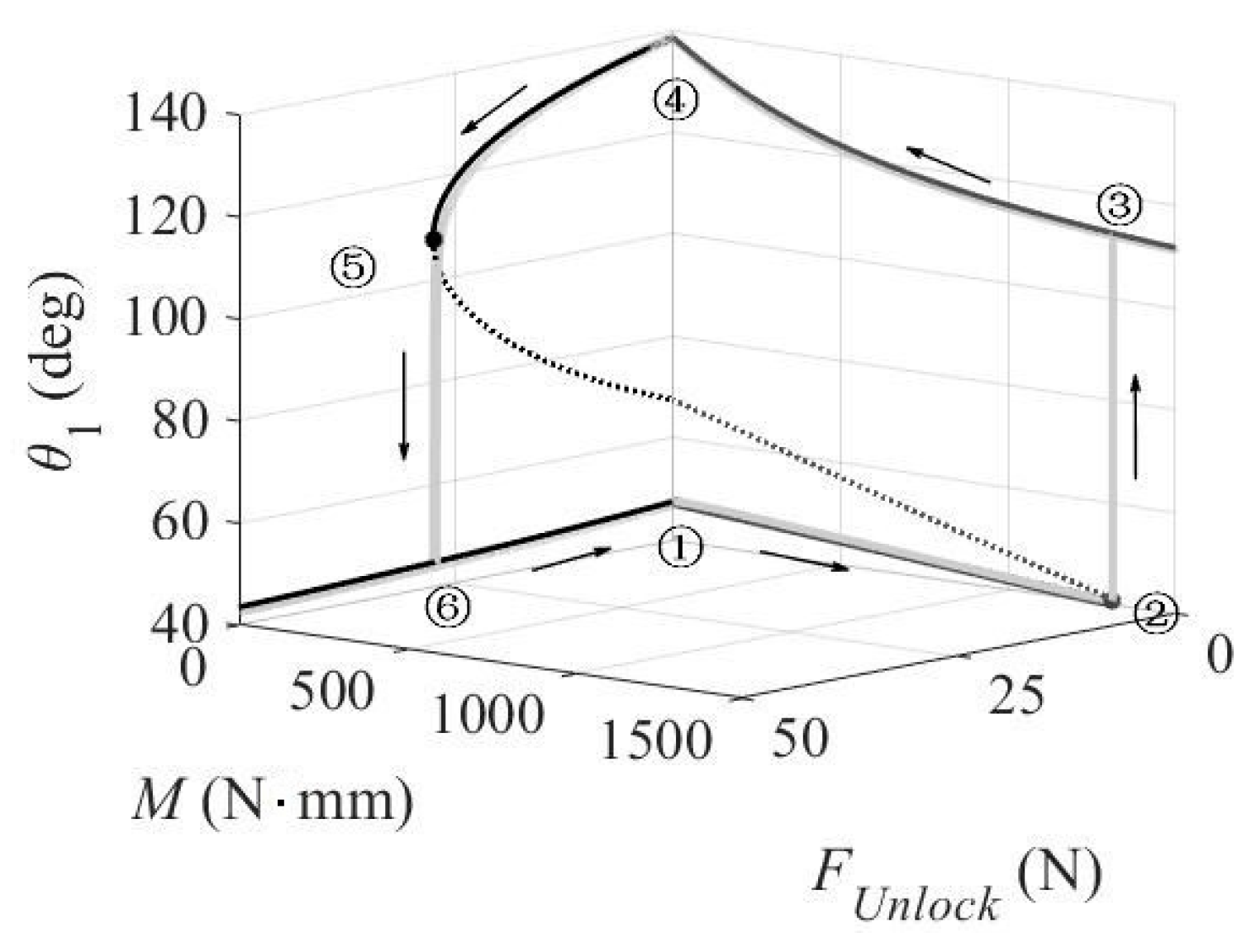
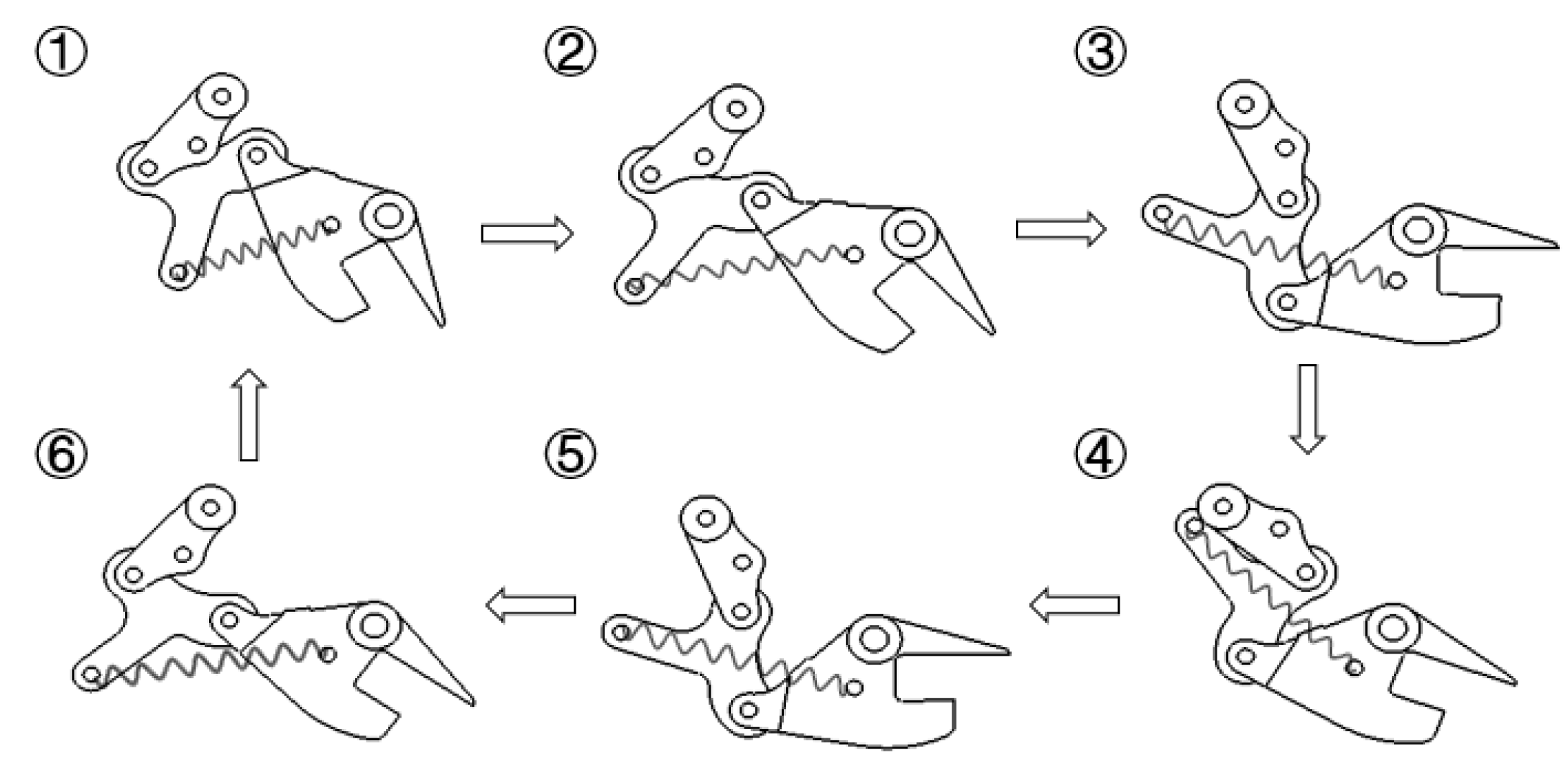
The hook lock mechanism is used to achieve smooth locking of the landing gear in the up position after retraction into the aircraft cabin. In
Figure 1, the schematics of a particular landing gear hook lock are presented. The lock mechanism is composed of linkage 1, linkage 2, lock hook 3, a lock bracket (including an unlocking actuator), a spring, etc. It operates on the following principle. In the locking process, the landing gear retracts slowly, driven by the retraction actuator, and when the lock is almost closed, the uplock roller on the gear strikes the lock hook by the action of retraction actuator. Through the impact force
, a counterclockwise moment
is formed to rotate the hook, which also drives the corresponding rotation of linkages 1 and 2 until they cross the centerline by the action of the spring to reach a stable locked state. At this point, the pressure inside the retraction actuator chamber is relieved. After the landing gear loses support from the retraction driving force, the uplock roller, which originally impacted the upper hook edge during locking, turns to hang on the lower hook edge due to the action of gravity on the landing gear. This ultimately completes the locking process of the landing gear upper lock. During the unlocking of the hook lock, the hook is subjected to a moment
that is opposite to the direction of the locking moment
since the entire landing gear hangs on it. Linkages 1 and 2 are opened by overcoming the spring force
and moment
of the lock with the unlocking driving force
, so that the lock mechanism leaves the stable overcenter state, and the roller separates itself from the hook by the action of gravity on the landing gear to complete unlocking.
2.2. Coordinate System
The o-xy coordinate system is established as shown in
Figure 2. Origin O is the point at which the x-axis crossing hinge point A intersects the y-axis crossing hinge point D. The x-axis is defined along the horizontal leftward direction, and the y-axis is aligned with the global gravity vector. A, B, C, and D represent the hinge points between the three linkages. E denotes the action point of the unlocking force. F and G are the application points of the spring.
represents the center of gravity of the
ith component.
2.3. Constraint Equations
As shown in
Figure 2, there are three primary elements in the hook lock mechanism besides the lock bracket (linkage 1, linkage 2, and hook 3). Their locations can be described as (
). This indicates that the mechanism has nine state variables, four revolute joints, and one degree of freedom (DOF). Therefore, eight constraint equations can be obtained, as presented in Equation (1).
The coordinate position of the spring point is obtained via Equation (2).
Here, (xi, yi) represents the center-of-gravity coordinates of the ith component; (,) represents the coordinate of the spring application point of the ith component; li is the length between two hinge points of the ith component; and m and n are the distances between the two hinge joints A and D of the lock bracket in the directions of x and y, respectively. a1, b1, and c1 denote the distances from the hinge points A, B, and D to the centers of gravity of the corresponding components. a2 is the distance from hinge joint A to action point E of the unlocking force ; b2 and c2 are the distances from hinge joints B and D to the application points of the spring, respectively; is the angle between the line which connects the two hinge points of the ith component and the x-axis (counterclockwise); and , , , , , and represent the angles of , , , , , and , respectively.
2.4. Dynamic Model
The dynamic model of the system is established based on the Lagrange equation. The basic form is expressed in Equation (3).
Here, L is the function that represents the difference between the kinetic energy and potential energy of the system; q is the generalized coordinate; and Q is the generalized external force.
The system has only one degree of freedom.
is selected as the generalized coordinate, and the generalized external force is the unlocking force
and moment
of the uplock roller acting on the hook. It is noteworthy that
and
represent the locking and unlocking moments of uplock roller acting on the hook, respectively, which are denoted uniformly by M in the following sections for ease of presentation. Here, by taking the derivative of Equation (1) with respect to time, Equation (4) is obtained.
From Equation (4), the translational kinetic energy
T1, the rotational kinetic energy
T2, the gravitational potential energy
V1, and the elastic potential energy
V2 of the system can be obtained as follows.
Here, lu is the original length of the spring; k is the spring stiffness; mi is the mass of the ith component; and Ji is the rotational inertia of the ith component.
The dynamic equation of the system can be achieved by substituting Equation (9) into Equation (3).
2.5. Static Model
As shown in
Figure 3, there are nine state variables in the lock mechanism. The static model in matrix form, as shown in Equation (10), can be derived from the force equilibrium equation and the moment equilibrium equation, and the nine state variables can be calculated from Equation (10).
In addition, , , and
.
Here, is the unlocking force; is the force from the ith component to the jth component in the x direction; is the force from the ith component to the jth component in the y direction; is the spring force; is the force from the spring to the jth component in the x direction; is the force from the spring to the jth component in the y direction; is the force from the lock bracket to the jth component in the x direction; and is the force from the lock bracket to the jth component in the y direction.
4. Unlocking Performance Analysis
Designers strive to make the unlocking force as small as possible to reduce the hydraulic pressure inside the unlocking actuator. The unlocking force is correlated closely with multiple parameters, including the landing gear weight, spring parameters, spring mounting position, etc. Therefore, the influences of the system parameters on the performance of the hook lock mechanism are analyzed during the unlocking process in this section.
4.1. The Influence of the Landing Gear Weight on the Unlocking Force
In the process of unlocking, the load applied to the hook by the uplock roller changes from the original impact force of the upper lock
to the weight of the landing gear
, which is greatly influential for the unlocking force
. To consider the influence of the landing gear weight on the stability performance of the upper lock, the corresponding weight moment equation should be added:
where
Mw is the locking moment corresponding to the weight of the landing gear;
ξ is the distance from rotation point D of linkage 3 to the action line of the hitting force between the lock roller and hook;
φ is the value of the angle
at which the landing gear weight begins to take effect; and
υ is a weight parameter related to the speed at which the weight of the landing gear acts on the lock.
The results are shown in
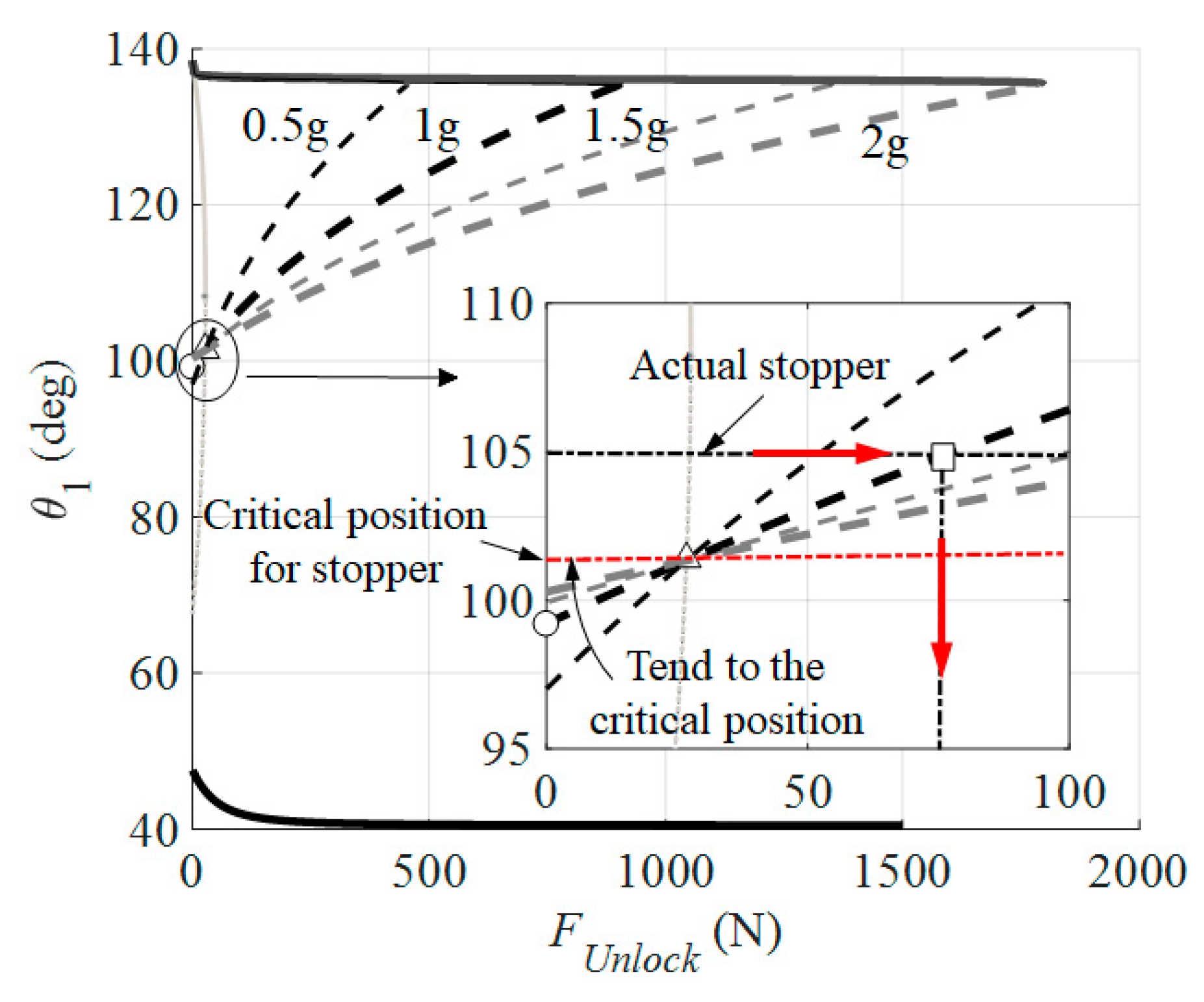
Figure 7, into which the results without landing gear weight (light gray line) are integrated.
Figure 7 clearly shows that
w has a great impact on the stability performance of the lock mechanism. Influenced by the weight of the landing gear, the unlocking bifurcation curves of the lock mechanism undergo marked changes, and the unlocking force of upper lock
also increases quickly with the increasing overload factor.
As is known, the upper lock mechanism should never be unlocked automatically, no matter how large the aircraft maneuvering overload. The lock mechanism can be unlocked automatically in the following case. When
, if the position of lock mechanism linkage 1 is less than a particular angle, the lock mechanism can jump automatically to the unlocked state from the locked state, even in the absence of an external driving force. Taking the computational result of a 1 g overload as an example (thick black line), the specific angle at which the lock mechanism can be unlocked automatically is
= 99° (the angle corresponding to the circular dot in
Figure 7) in this scenario. That is, for the 1 g overload case, the position of the limit stopper should be greater than 99°.
To study the variation trend of this specific angle, the limit stopper mounting position that satisfies all operating conditions was investigated. We calculated the unlocking curves under the following four conditions: 0.5 g, 1 g, 1.5 g, and 2 g. The results reveal that the specific unlocking angle tends to have a critical position of 101.3° with the increasing overload of the landing gear. Hence, it can be inferred that the specific angle will be infinitely close to 101.3° (the angle corresponding to a triangle in the figure) when the overload is infinite in theory. Accordingly, the lock mechanism can be in a completely locked state without being accidentally unlocked as long as its stopper position is greater than 101.3°, unless there are any external disturbances such as the maloperation of an unlocking actuator. When is between 99° and 101.3°, the landing gear is in a pseudolocked state, wherein the lock mechanism tends to be unlocked due to disturbances (e.g., overload on the landing gear due to supermaneuvering flight), despite the seemingly locked landing gear. Therefore, the pseudolocked state is dangerous.
For the upper lock mechanism of the actual aircraft landing gear discussed in this paper, the limit stopper is at
(the angle corresponding to a square in the figure). The unlocking process is explained by taking the scenario of a 1 g overload as an example. When
begins to increase from 0, the angle
remains unchanged because of the action of the limit stopper (rightward arrow line in the partial view of
Figure 7). As
increases to an unstable equilibrium point (reaching the thick black dashed line), the system jumps immediately to a stable equilibrium point below (downward arrow line), and the upper lock is unlocked. Hence, the
of the equilibrium point corresponding to
is the upper lock unlocking force when the influence of the landing gear weight is taken into consideration. The numerical continuation result of this unlocking force is
, with a 5% error compared with the test result, showing a high goodness of fit.
4.2. The Influence of the Spring Parameters on the Unlocking Force
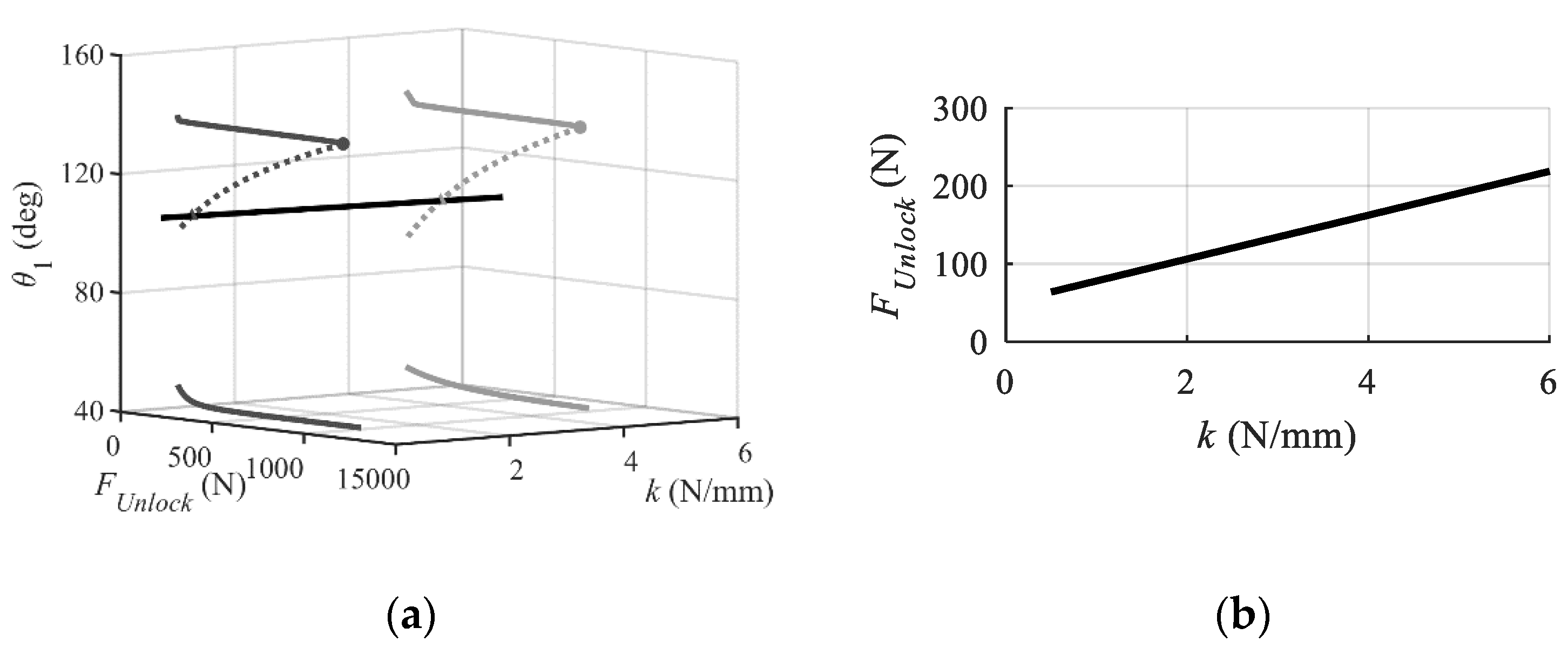
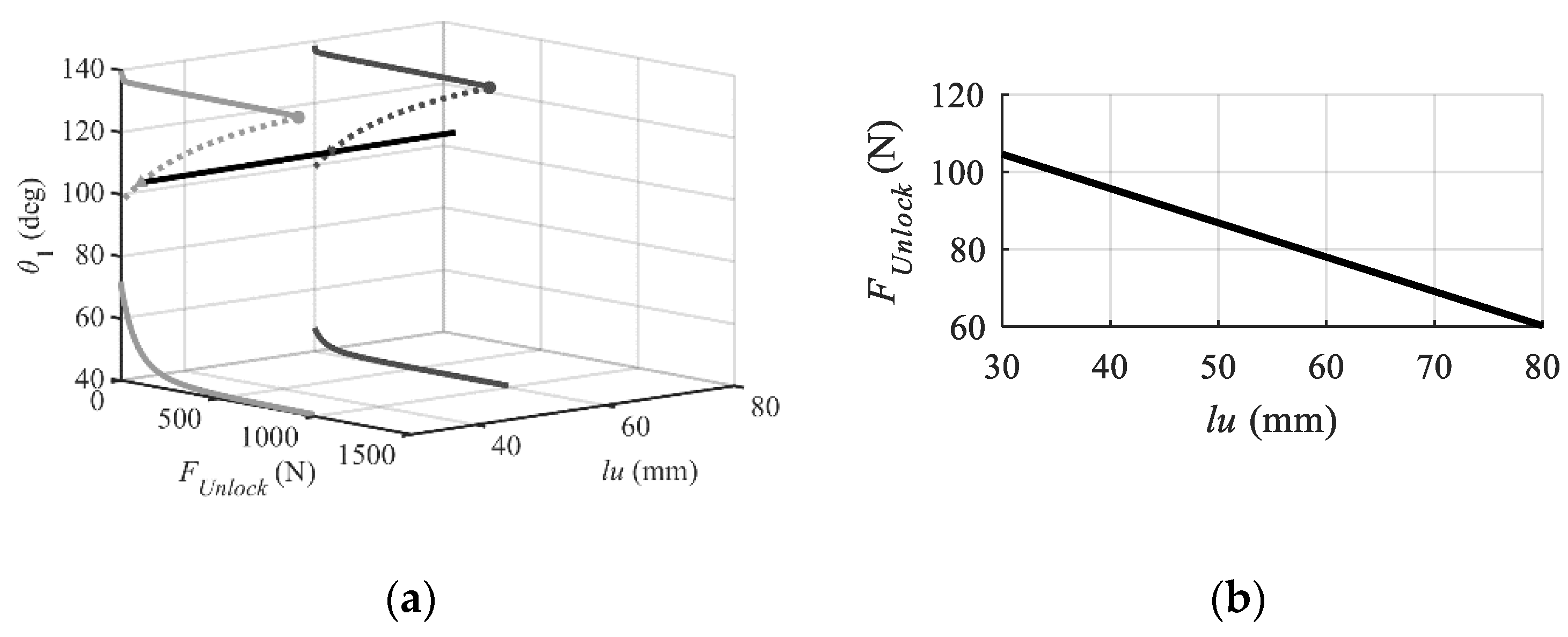
The spring stiffness k and the original spring length lu directly affect the magnitude of the spring force. Different stiffnesses and original lengths result in diverse bifurcation points of this mechanism, thus affecting the magnitude of the unlocking force.
Figure 8 and
Figure 9 show how the unlocking force varies with the stiffness
k and the original length
lu of the spring, respectively. The results indicate that the influences of
k and
lu on the unlocking force are linear. The unlocking force increases monotonically with increased
k values and decreases monotonically with increased
lu values, while
is more sensitive to changes in
k than to changes in
lu.
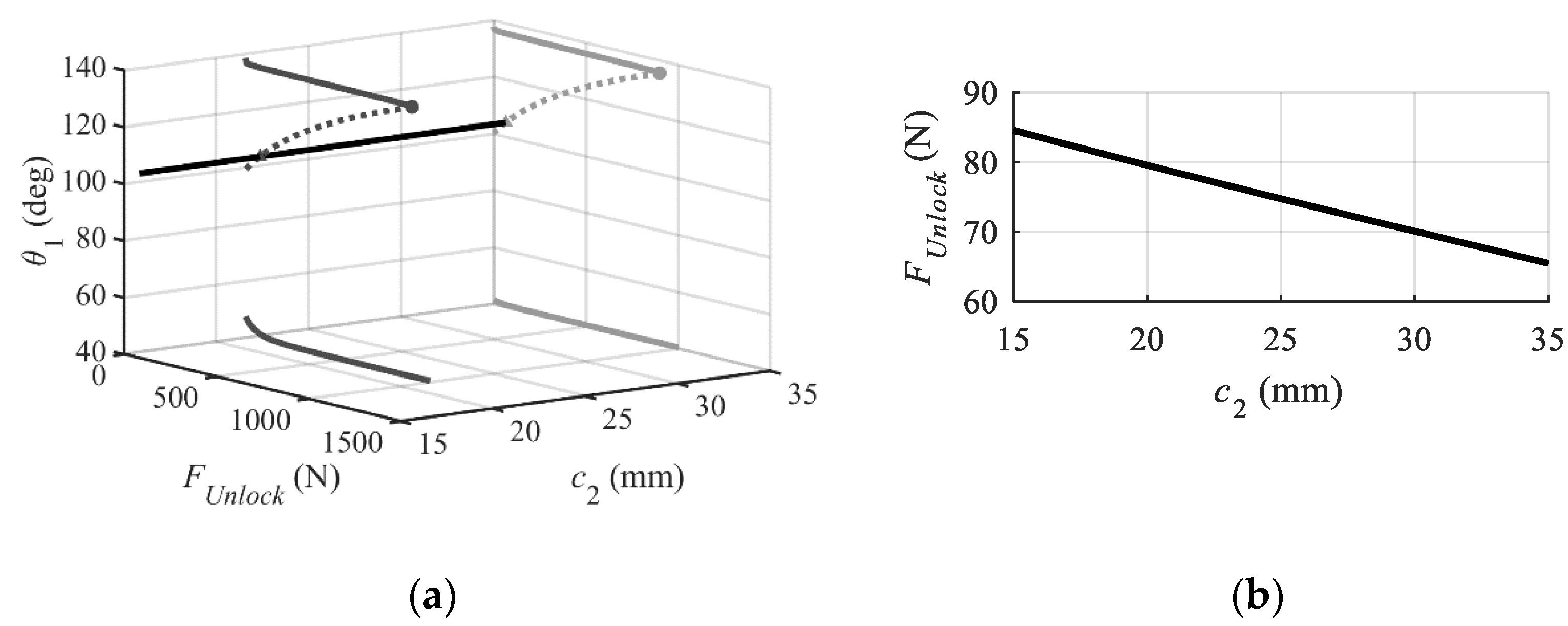
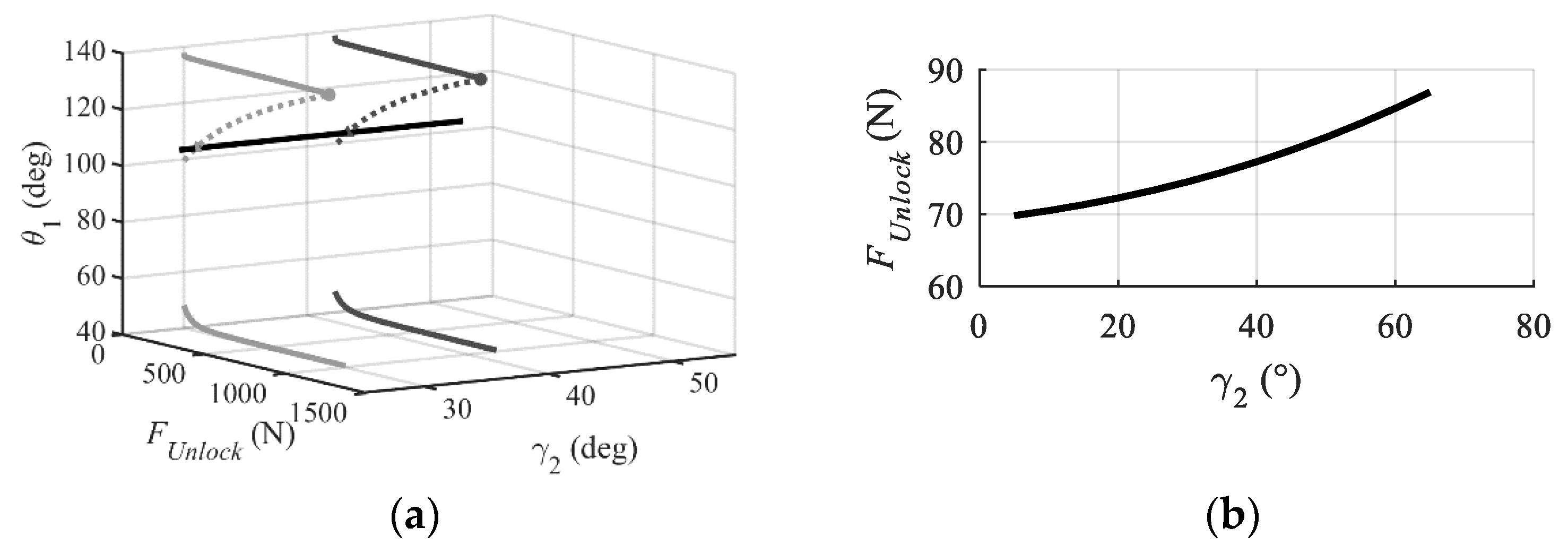
4.3. The Influence of the Spring Attachment Point on the Unlocking Force
The spring attachment point and angle affect the spring elongation and thus indirectly influence the spring force, which changes the position of the bifurcation point and the unlocking force of this mechanism.
Figure 10 and
Figure 11 show how the unlocking force varies with changes in
and
, respectively. As shown by the results, the influence of
on the unlocking force is linear, presenting a monotonically decreasing trend. With the increase in
,
becomes increasingly less sensitive to
, but the change is insignificant. The influence of
on the unlocking force is a monotonically increasing nonlinear function, so
becomes ever more sensitive to
with increasing
values.
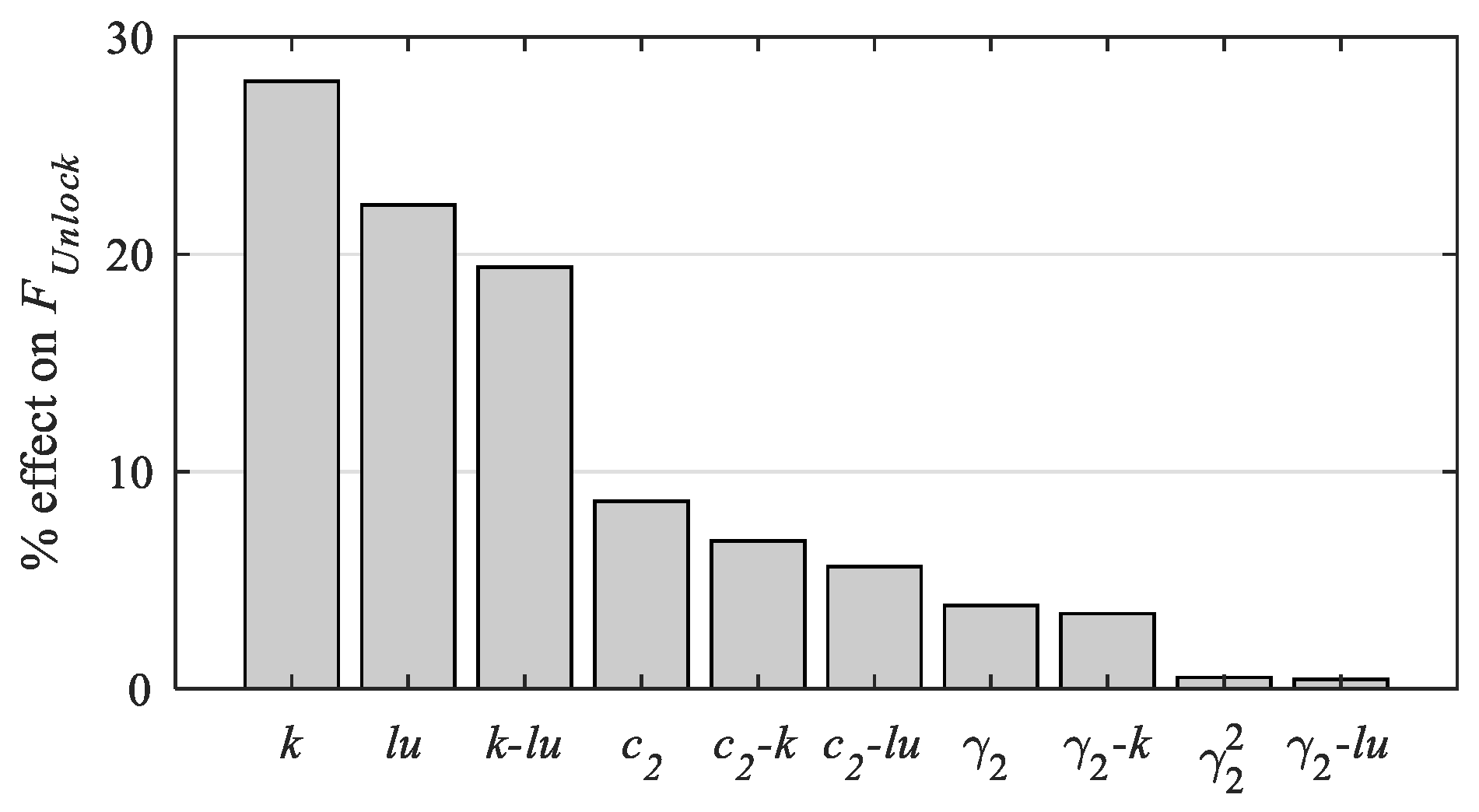
4.4. Parameter Sensitivity Analysis
On the basis of the foregoing analysis of single parameter influence on the unlocking force
, this section carries out the sensitivity analysis concerning the multi-parameter influence on
. This not only allows visualization of the importance of various parameters, but also provides an analytical basis for the subsequent optimization computation of the unlocking force.
Figure 12 displays the sensitivity analysis results. As is clear, the spring stiffness
k, the original spring length
lu and the cross term
k-
lu have higher contributions to the unlocking force, while the spring mounting position parameters
and
contribute less to
.
5. Optimization Analysis of the Minimum Unlocking Force
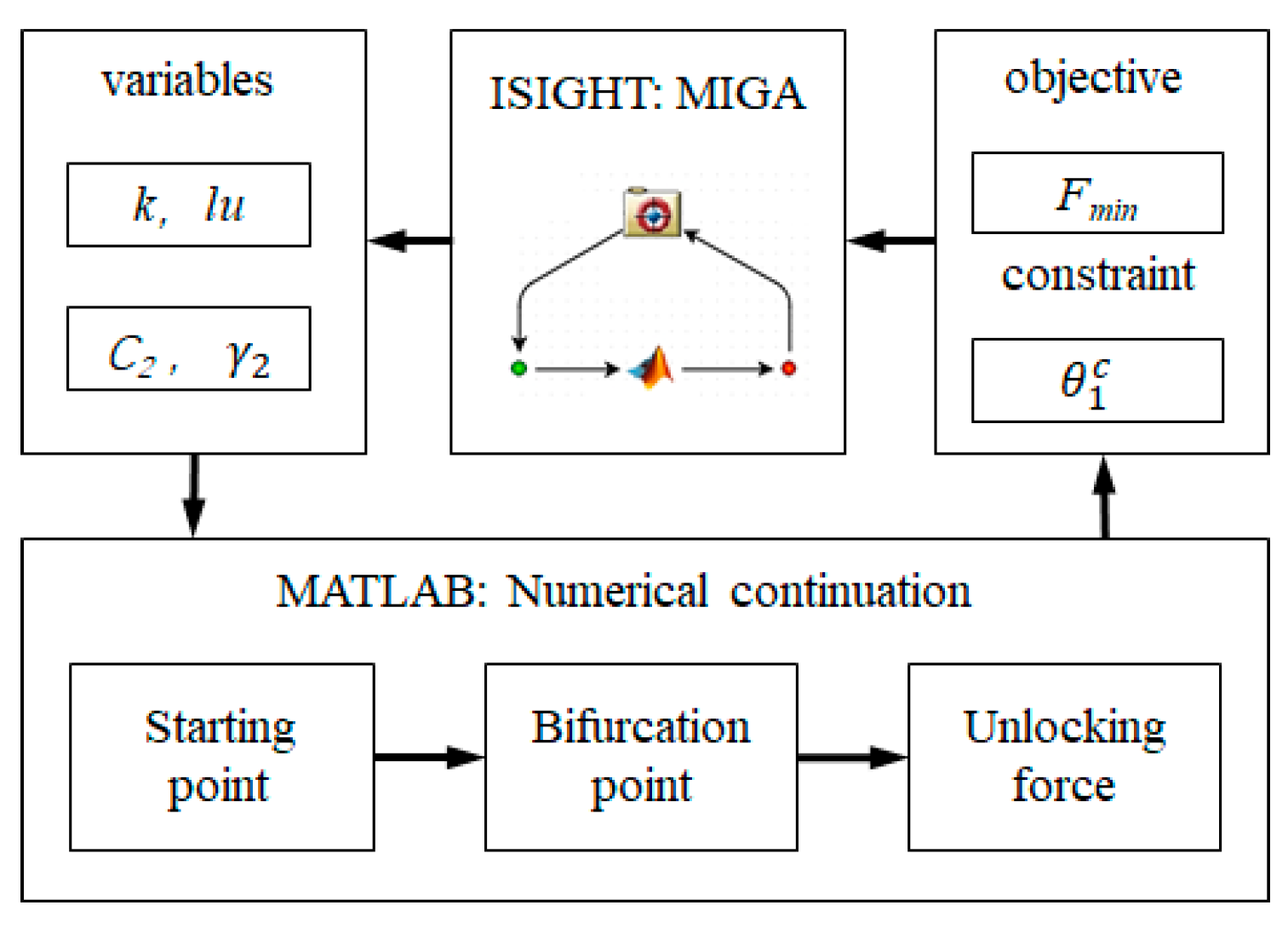
This section describes the optimization analysis that was conducted to minimize the unlocking force based on the computer-aided engineering software ISIGHT (Dassault, France) combined with MATLAB. On the premise of ensuring an adequate locking ability of the hook lock mechanism (i.e., ensuring that satisfies the specified requirements), a multi-island genetic algorithm (MIGA) is applied to optimize considering the following variables including the spring stiffness k, the original spring length lu, the spring installation position and the spring angle .
The optimization process is illustrated in
Figure 13. First, the bifurcation analysis model is established in MATLAB, and the optimization analysis model, ISIGHT, is also constructed. Each optimization iteration is completed in the locked area of the mechanism. Initially, a set of design variables
is generated randomly according to the rules of MIGA, which is then passed to MATLAB to determine the motion trajectory and bifurcation position of the lock mechanism using a numerical continuation algorithm with the single parameter of the unlocking force. As a result, it obtains the angle
characterizing the locking ability and the unlocking force
enacted by the limit stopper. Afterwards,
is checked to determine whether it conforms to the locking ability requirement, and
is examined for its validity as a comparison value. If
is an invalid comparison value, a new set of design variables
is generated directly to enter the next iterative computation. In addition, if
is a valid value, a comparison is made with the previous computational result to check for convergence. When the convergence requirement is met, the optimization computation ends. Otherwise, the next iterative computation is initiated likewise until the convergence requirement is satisfied.
Here, the optimization problem can be expressed as follows based on the structural constraint and design requirements of the hook lock mechanism:
Variables: ;
;
;
.
Constraint: .
Objective: Min .
The optimization results are shown in
Table 2. After optimization, the angle
becomes slightly smaller than the initial value of 138.5°. Nevertheless, it conforms to the specified design requirement of 138°, which can thus guarantee the locking ability of the hook lock. In contrast, the unlocking force decreases from 78 N to 68.5 N, showing a reduction of 12.2%.
6. Conclusions
(1) In this paper, the combination of a numerical continuation algorithm and bifurcation theory was applied to the design and analysis of a hook lock mechanism for aircraft landing gear. The mechanism underlying the unstable jumping phenomenon of the lock mechanism was elucidated. Compared to conventional dynamical methods, the proposed combined method has unique advantages concerning the stability analysis of the mechanism, making it especially effective for use in the early stage of aircraft R&D.
(2) The hook lock mechanism is prone to pseudo-lock-up when the influence of the landing gear weight is taken into consideration. This paper analyzed in detail the conditions under which the lock mechanism can unlock automatically at various landing gear overloads. Additionally, the paper also derived the critical angle beyond which the hook lock can be in a completely locked state, thereby providing a design basis for the mounting position of the limit stopper for the lock mechanism.
(3) The influences of the lock spring parameters and mounting position on the performance of the lock mechanism were analyzed, and the unlocking force of the lock mechanism was optimized based on MIGA. The optimization results demonstrate that the unlocking force is reduced by 12.2% while ensuring the locking ability of the lock mechanism.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}