1. Introduction
In an autonomous driving system, 3D vehicle detection is essential to ensure safety, which can provide the reliable relative location and speed information between the vehicle and other traffic participants for drivers or an intelligent control system to avoid collisions. Unlike classical 2D object detection methods [
1,
2] that obtain objects’ categories and bounding boxes in the image plane, 3D object detection methods can reveal more detailed information about the objects, including the physical size, relative position, and heading information. This information is crucial for intelligent driving tasks, such as behavior decision, path planning, navigation control, collision avoidance, etc. However, even with this information, a lower performance is achieved compared with that of 2D object methods. On the KITTI dataset, the average precision (AP) of 2D vehicle detectors is about 15% higher than that of 3D detectors [
3]. Therefore, 3D object detection methods need to be further studied.
According to the sensors most commonly used in the traffic scene, 3D object detection methods can be roughly divided into three categories [
4]: image-based, point-cloud-based, and fusion-based methods. Image data can provide abundant texture properties, which are of great significance to object recognition. However, the lack of explicit depth information restricts the accuracy of position and bounding box regression for objects, especially long-range small-scale objects. Point cloud data can retain the physical size and depth information of the object, which is beneficial to position and 3D bounding box regression. However, due to its sparsity and lack of texture information, many kinds of objects have similar feature representations in 3D point cloud space, which is not conducive to object recognition. Fusion-based methods can make full use of the advantages of the two sensors and achieve a better detection performance.
Influenced by the rapid development of 2D object detection methods, a LiDAR(Light Detection and Ranging)point cloud is usually projected as pseudo images, such as a FV (front view) map [
5] or a bird’s-eye view (BEV) map [
6,
7,
8], and then the pseudo images and RGB images are fed to the two-stage 2D detector with an extension to perform 3D bounding box regression, classification, and orientation estimation.
The fusion-based methods have achieved good performance, but there are still some shortcomings to be solved. First, projecting the LiDAR point cloud as a BEV map creates a loss of a large amount of information, especially the height information, causing a significant gap between AP
BEV and AP
3D. With the KITTI dataset, the AP
BEV is more than 10% higher than AP
3D. Being able to retain as much information as possible on the BEV map will directly affect the final detection results. Second, the procedure of the two-stage detection structure is complex, the utilization efficiency of feature is low, and the parameters are redundant, causing a low generalization capability of the network. For example, the backbone network usually uses a VGG16-like [
9] (visual geometry group) structure in the feature extractor; the refinement network adopts cascaded, fully connected layers (FC) [
6,
7], which lead to a huge number of parameters and a lower performance compared with other methods. A standard VGG16 network has more than 138 million parameters; some literature has proved that most of them have little effect on the final results [
10,
11]. ResNet [
10] introduces a residual structure with only 25.5 million parameters, but the classification performance is higher than that of VGG16 with the ImageNet dataset. Deep Compression [
11] achieves about 40 times the compression rate based on VGG16 networks by pruning, trained quantization, and Huffman coding, and the performance of the network has risen rather than fallen. In addition, the design of a loss function for 3D object detection is more complex than that of 2D object detection. Apart from classification and bounding box regression, the output target of the 3D object detection method has one more orientation estimation; meanwhile, there is also one more dimension in the bounding box regression. The diversity of loss categories and calculation methods makes it difficult to optimize the network. Being able to balance the loss weight of each optimization target is equally important to the final detection results.
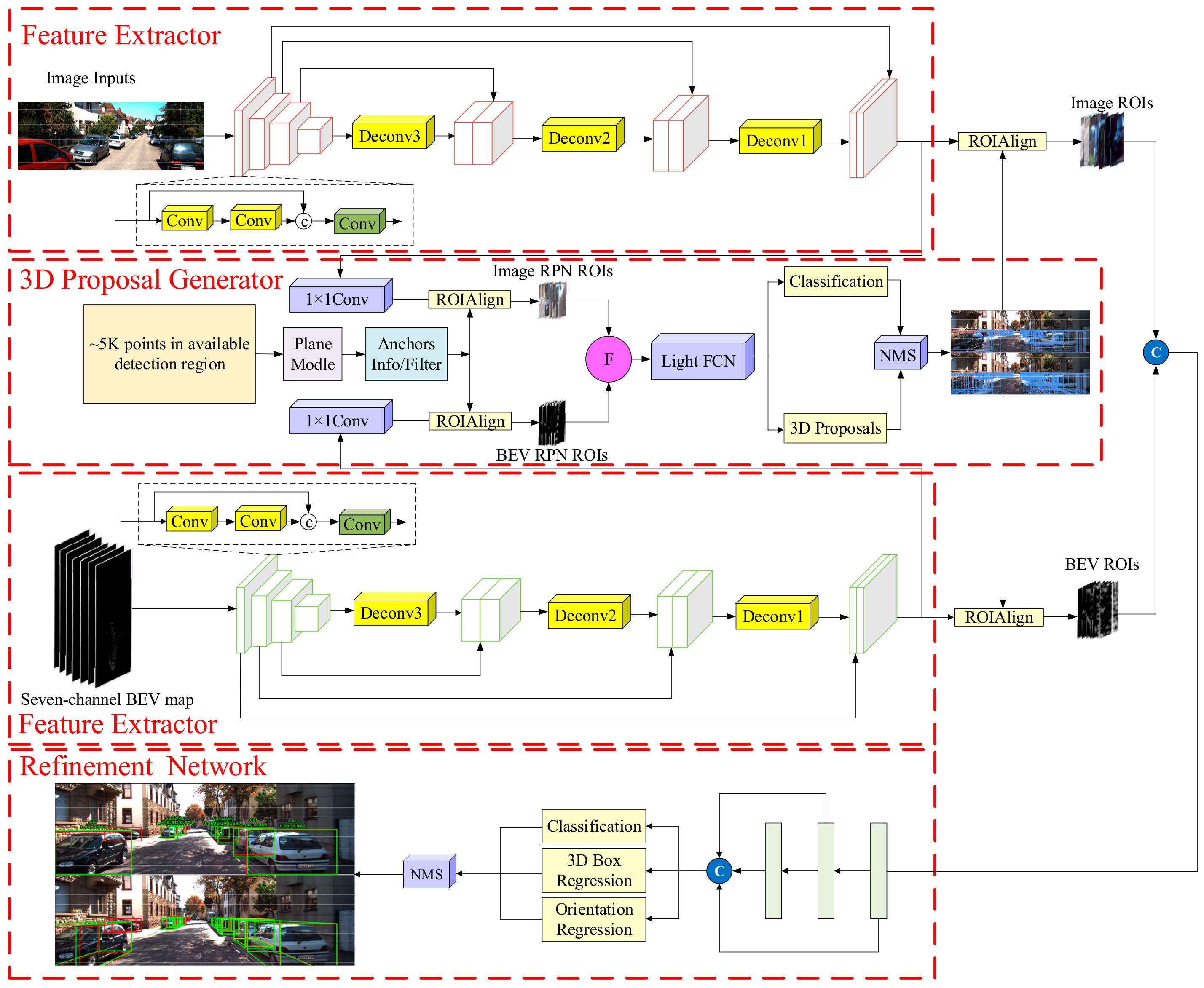
In this paper, a feature deep continuous aggregation (FDCA) network is proposed to solve the above problems (
Figure 1). The contributions of this work are as follows:
A seven-channel BEV map was generated, which contains one global height channel, five local height channels, and one density channel to preserve the local and global features. The five local height channels preserve the local location correlation among layers by global normalization.
The feature deep continuous aggregation (FDCA) architecture is proposed to improve the generalization ability of the network. The abstract features were fused continuously and deeply by concatenating different feature layers in the feature extractors and the refinement network.
RoIAlign was exploited to improve the cropping accuracy of features for proposal regions.
A light fully convolutional network (FCN) was adopted to reduce the computation load and memory requirements in the 3D proposal generator.
A loss category weight mask was used to balance the proportions of different loss categories in the total loss, and two refined regression loss weight masks were exploited to improve the regression accuracy in high dimensions.
The structure of this paper is as follows. The related works are introduced in
Section 2. The proposed network of this paper is illustrated in
Section 3. The results of comparison experiments and ablation experiments are discussed in
Section 4. Finally, the conclusions are given in
Section 5.
3. Approach
The proposed network consists of three parts: two feature extractors, a 3D proposal generator, and a refinement network, the detailed network structure is shown in
Figure 1. Feature extractors were used to generate high-resolution feature maps from both the BEV map and RGB image. Both feature maps were then fused to generate non-oriented region proposals using a 3D proposal generator. Finally, the corresponding features from each proposal were fed to the refinement network for the 3D bounding box regression, orientation estimation, and classification.
3.1. Seven-Channel BEV Map
Considering the disorder and sparsity of a point cloud, it cannot be directly processed by 2D convolution layers. Therefore, References [
6,
7,
8,
19,
20,
21] project the raw point cloud as a BEV map to output the detection results using a 2D detector. In this paper, a seven-channel BEV map was generated, which contained five local height channels, one global height channel, and one density channel.
There were about 120 K points in each frame of the point cloud, which is large and only some of them were in the area of the image plane. Therefore, the point cloud was first cropped to give a fixed region to ensure that the reserved points (about 20 K) were included in the field of view of the camera. Then, the reserved points were divided into m × n × k voxel grids with a 0.1-m resolution.
Along the
Z-axis,
k voxel grid layers were divided into five equal slices to generate local height channels encoded with the maximum height in each voxel grid. To avoid destroying the local correlated between layers, every equal slice was globally normalized:
where
represents the
ith local height channel of the BEV map,
is the maximum height of points in the
ith slice, and
is the height of all selected point clouds.
In References [
6,
7], the global height feature of the point cloud was not considered. To solve this problem, a global height representation was generated and added into the BEV map as the sixth channel:
where
P(
hmax) is the maximum height of points in each height pillar.
The seventh BEV channel was a density channel that followed the procedure described in Ku et al. [
7]. The seven-channel BEV map is shown in
Figure 2.
3.2. Feature Deep Continuous Aggregation Network
3.2.1. The Feature Extractor
For the feature extractor, the FPN structure is often used as the backbone network. FPN is an excellent network that not only has a high resolution, but also has abstract representation capability. Many methods [
7,
29,
30] have proved that FPN is a general network, and the performance of a network with FPN is much better than that without FPN. Therefore, FPN architecture was adopted as the backbone network in this paper.
The full-resolution FPN network includes an encoder and a decoder, as shown in
Figure 3. The structure of encoder is usually VGG16-like, which is used to generate abstract complex features, while a bottom-up decoder is modeled, which is used to up-sample the feature map back to the original input size.
During in depth study of the structure of convolutional neural networks, researchers have found that the traditional network structure extracts only a few features at each layer, resulting in parameter redundancy. For example, randomly removing several layers of the trained ResNet will not have a significant impact on the final prediction results. In this paper, a cross-layer link structure was adopted in the encoder, which could comprehensively utilize the features of different block layers to improve the utilization efficiency of features and reduce the number of parameters. Compared with the general neural networks, which directly depend on the characteristics of the last layer, a cross-layer link structure can make use of the features of low complexity in the shallow layer, making it easier to obtain a smooth decision function with a better generalization performance and improving the anti-overfitting ability of the network. The cross-layer link structure and parameter settings in our network are shown in
Figure 4 and
Figure 5. Importantly, compared with traditional encoder structures, we reduced the parameters of each convolution layer and increased the channel number of each block layer using concatenation operations, finally resetting these feature layers using a 1 × 1 convolution. The encoder generated a feature map that was eight times smaller than the input size. The decoder recovered the feature map to the same size as the input through three up-samplings.
3.2.2. 3D Proposal Generator
Referring to the RPN structure in Faster R-CNN, feature maps generated from both the image and BEV maps are fused and fed into a 3D proposal generator to regress the difference between the 3D anchors and the ground truth.
The 3D anchor was represented as an axis-aligned box encoding, where two clustering centers were selected to cluster the anchor size for vehicles in 3712 samples. At the same time, the orientation of each anchor was set to 0 and 90 degrees, i.e., there were four anchors in one location. As shown in
Figure 6, the centers of the anchors were sampled at a stride of 0.5 m, eventually generating 89,600 anchors in BEV. The empty target anchors that did not contain LiDAR points were removed using preliminary screening, leaving about 21,000 anchors, as shown in the green box in
Figure 6.
As shown in
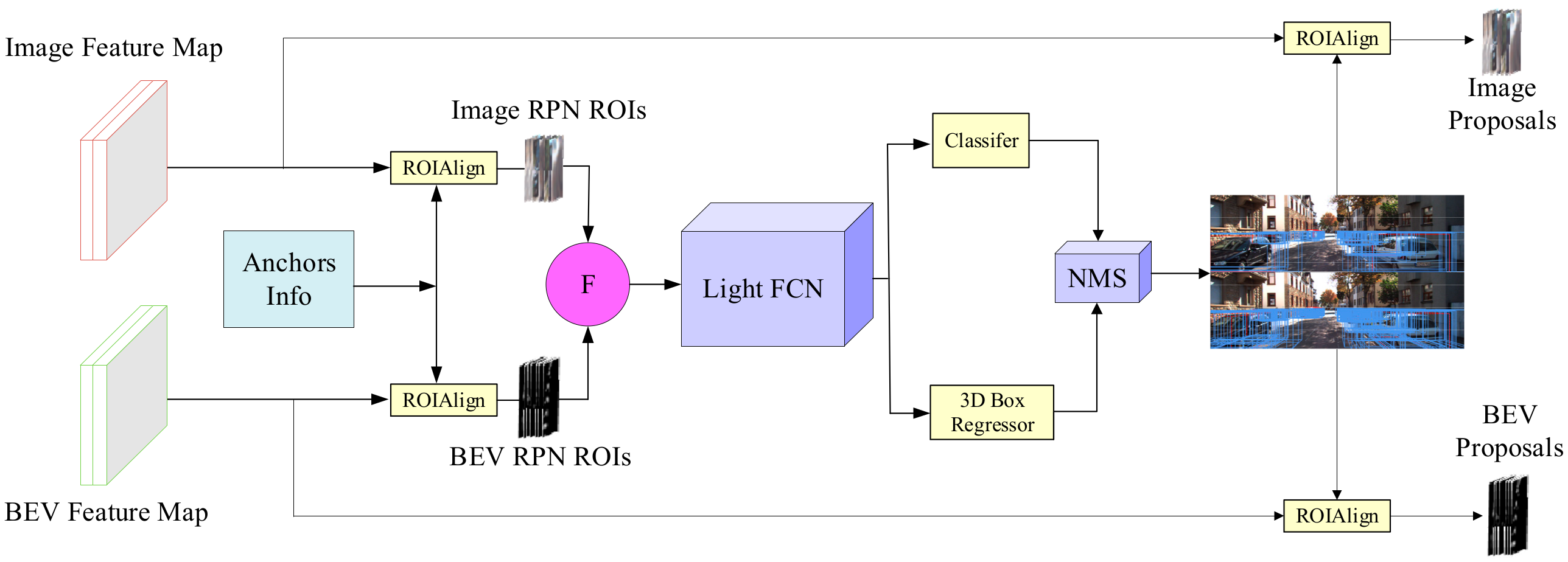
Figure 7, the features of each anchor were cropped and resized to 3 × 3 after dimensionality reduction via a 1 × 1 convolution. Then, the corresponding features from each view were fused via an element-wise operation. Finally, the fused feature vectors were passed into a light FCN network to output the categories of anchors and the axis-aligned box deviations between the anchors and the ground truth. The first k proposals based on the confidence score sorting were selected, and then the feature maps of the corresponding region from each proposal were cropped and resized to 7 × 7, which were finally fed to the second-stage refinement network.
The feature cropping and extraction operations of anchors and proposals have a great influence on the subsequent detection. RoIPooling [
1] is the most commonly used operator; however, when extracting the feature of small-scale vehicles, the integer operation will lose a large amount of object information, and these quantization operations will lead to the extracted feature not matching the real object. RoIAlign [
33] avoids integer operations by using floating-point arithmetic to accurately align the original image area and feature area of the object, and uses bilinear interpolation to regenerate the feature area accurately. Therefore, RoIAlign was exploited to generate the equal-sized features to improve the feature extraction accuracy of the anchors and proposals in this paper.
3.2.3. Refinement Network
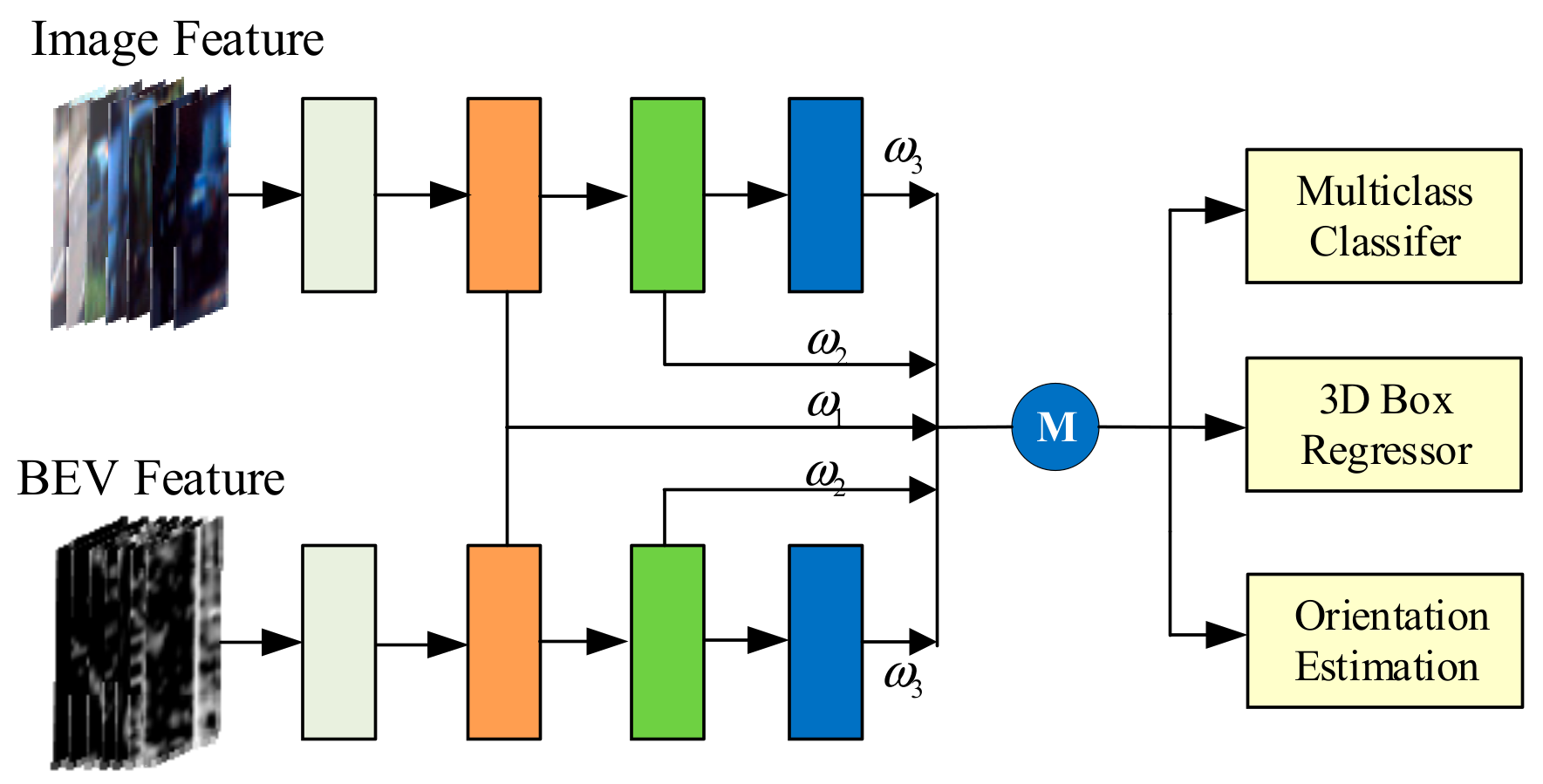
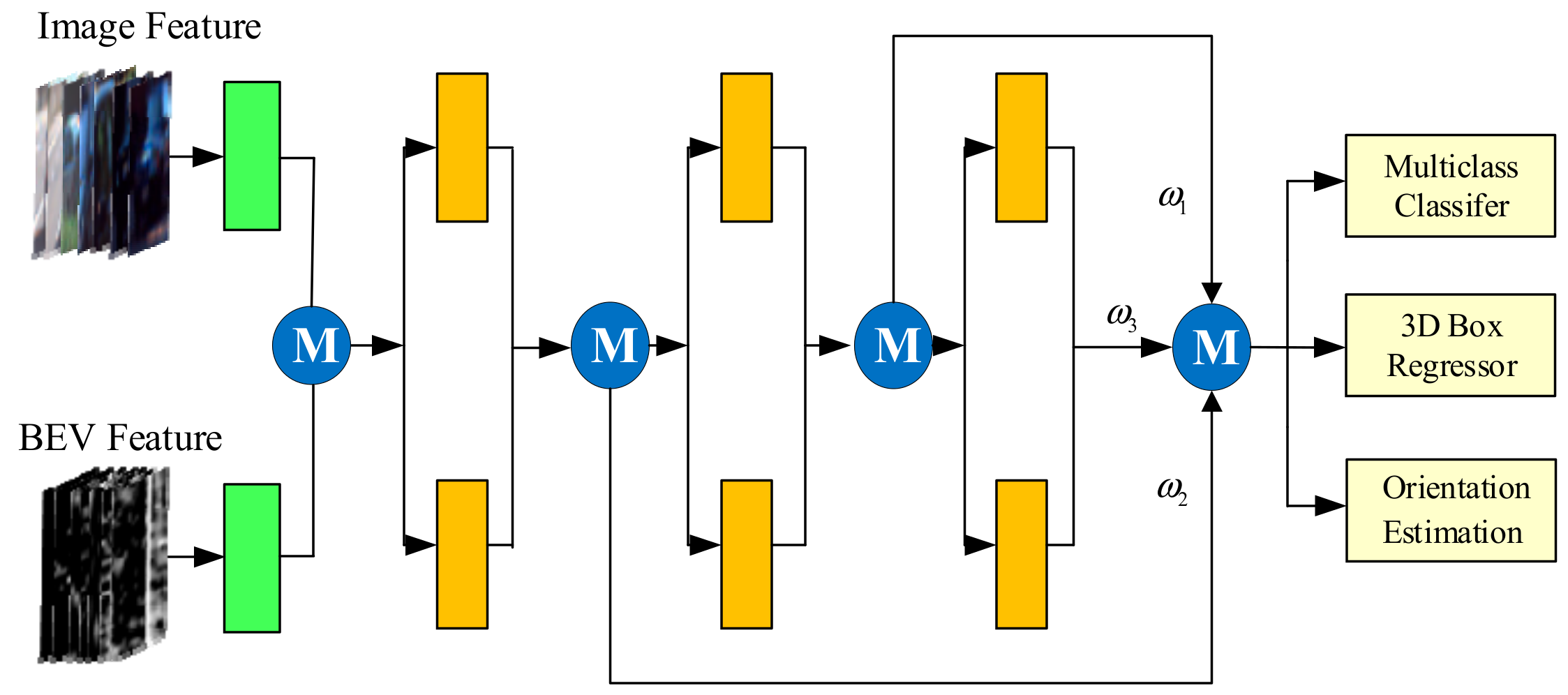
The features of each proposal were further fused to output the categories, locations, sizes, and orientations of the vehicles. At present, there are three fusion modes [
6]: (1) early fusion, where features are merged at the beginning of processing; (2) late fusion, where features of each branch are processed separately and merged in the last stage; and (3) deep fusion, where features of each branch are mixed in different layers, resulting in a more general fusion scheme.
All three modes utilize fully connected layers that are connected step-by-step to process the fused feature and perform the 3D box regression, orientation estimation, and classification using the last layer only. Therefore, the cross-layer link structure in the feature extractor was also applied here to improve the efficiency of the fully connected parameters without increasing their numbers, as well as making full use of the characteristics of each layer. The cross-layer link structures under the three fusion modes are shown in
Figure 8,
Figure 9 and
Figure 10.
Assuming that the fusion network had L layers, all fully connected layers were further fused to ensure that the final detection result depended on the parameters of each layer:
where
represents the output of the features from
ith fully connected layer,
is the weight of the
ith fully connected layer, and
is the fusion operation method used (e.g., concatenation, mean and maximum).
3.3. The Multi-Task Loss Function and Loss Weight Masks
The loss function of our network consisted of five parts: category loss and axis-aligned box regression loss in the 3D proposal generator network, category loss, and 3D bounding box regression loss and orientation estimation regression loss in the second refinement network, as shown in Equation (4). Among them, the value of the 2D intersection-over-union (IoU) in BEV between the anchors and ground truth was used to judge whether the anchor belonged to the background. Like the loss function in Faster R-CNN, the background anchor does not calculate the regression loss. The softmax function was used to calculate the category loss, and the Smooth L1 function was used to calculate the regression loss and orientation estimation loss.
The diversity of loss categories and computing methods make it difficult to optimize the network. In the experiments, the low regression accuracy in height dimension results in the AP3D is more than 10% lower than the APBEV. Balancing the loss proportion of each optimization target in the total loss has a great impact on the final detection results.
Aiming toward solving the above problems, three weight masks were set in the loss function: one category loss weight mask for the total loss and two refined regression weight masks for the bounding box regression loss in the 3D proposal generator and the second-stage fusion network. For these three kinds of losses, we set the category weight mask to
. In the 3D proposal generator network, anchors were encoded using the axis-aligned bounding box and are represented by the centroid
and the axis-aligned dimensions
, as shown in
Figure 11 (left). The regression target was the difference
between a set of prior 3D anchor boxes and the ground truth boxes. Therefore, the weight mask was set to
. In the second-stage refinement network, the regression targets were the offsets of the four corners and the height from the ground plane between the proposals and the ground truth boxes
, as shown in
Figure 11 (right). Therefore, the weight mask was set to
.
3.4. Training and Parameters Setting
We trained a network with an adaptive moment estimation (ADAM) optimizer for 120 K iterations and saved one model file per 1000 epochs. The initial learning rate and decay factor were set to 0.0001 and 0.8, respectively.
There were three fully convolutional layers in the 3D proposal generator, each with a 256-convolution kernel, and three fully connected layers in the refinement network, each with a parameter of 2048. The corresponding fusion weights were all defaulted to 1. The element-wise mean operation was used for the cross-layer link in the refinement network. The sizes of the 3D anchors were (l = 3.51 m, w = 1.58 m, h = 1.51 m) and (l = 4.23 m, w = 1.65 m, h = 1.55m). The loss category weight mask was set to [1:5:2], the regression weight mask in the 3D proposal generator was set to [1:1:3:1:1:3], and the regression weight mask in the refinement network was set to [1:…:1:3:3]. In addition, the dropout parameter in the refinement stage was set to 0.7.
4. Experiments and Results
In this section, we give the evaluation results of our FDCA network using the KITTI object detection benchmark, which is one of the most commonly used datasets in the driving scene. Like other 3D detection methods, 7481 labeled samples were split into a training set and a validation set at approximately a 1:1 ratio. Following the official classification criteria of KITTI, the samples were divided into “easy, moderate, and hard” cases. Our proposed networks were trained on the training set and the validation set was used to evaluate the performance of the trained networks. First, we compared the performance of the FDCA network with that of other published methods to prove the superiority of our proposed method. Then many ablation experiments were carried out to test the innovations this paper proposed.
4.1. 3D Vehicle Detection
In the research regarding 3D object detection, AP is best used to verify the performance of the method because it represents the performance not under a certain confidence threshold, but under all confidence thresholds. In practical application, a certain confidence threshold is usually selected (threshold when the recall is 0.1) to balance the accuracy rate and the false detection rate.
According to the official performance evaluation protocol of the KITTI 3D object detection benchmark, 3D vehicle detection results were evaluated using the AP3D and APBEV at a 0.7 IoU threshold for three modes: easy, moderate, and hard.
We compared our proposed method with other fusion-based methods—MV3D, F-PointNet, and AVOD-FPN—and the comparison results were summarized in
Table 1.
It is shown that our proposed network outperformed all other fusion-based methods in terms of 3D object detection, with a noticeable margin of 0.97% 3D AP on the easy setting, 2.38% on the moderate setting, and 0.78% on the hard setting in comparison to the second-best performing method, AVOD-FPN. Similarly, the performance on orientation (average heading similarity, AHS) had the same tend. It was 1.09%, 2.46%, and 0.85% higher than that of AVOD-FPN for the three settings, respectively. However, for the AP
BEV, FDCA was not significantly higher than the AVOD-FPN (note that in AVOD-FPN, the performance of the AP
BEV is not provided; the results in
Table 1 were obtained by running AVOD-FPN). This revealed that our innovations ultimately improved the performance of 3D object detection by improving the accuracy of the height regression. Meanwhile, the location error (average distance) of the detected vehicles was calculated to be 0.163 m. Compared with AVOD-FPN, which had the best performance in real-time, our architecture only slightly increased the runtime by 0.01 s on the GXT 1080Ti GPU.
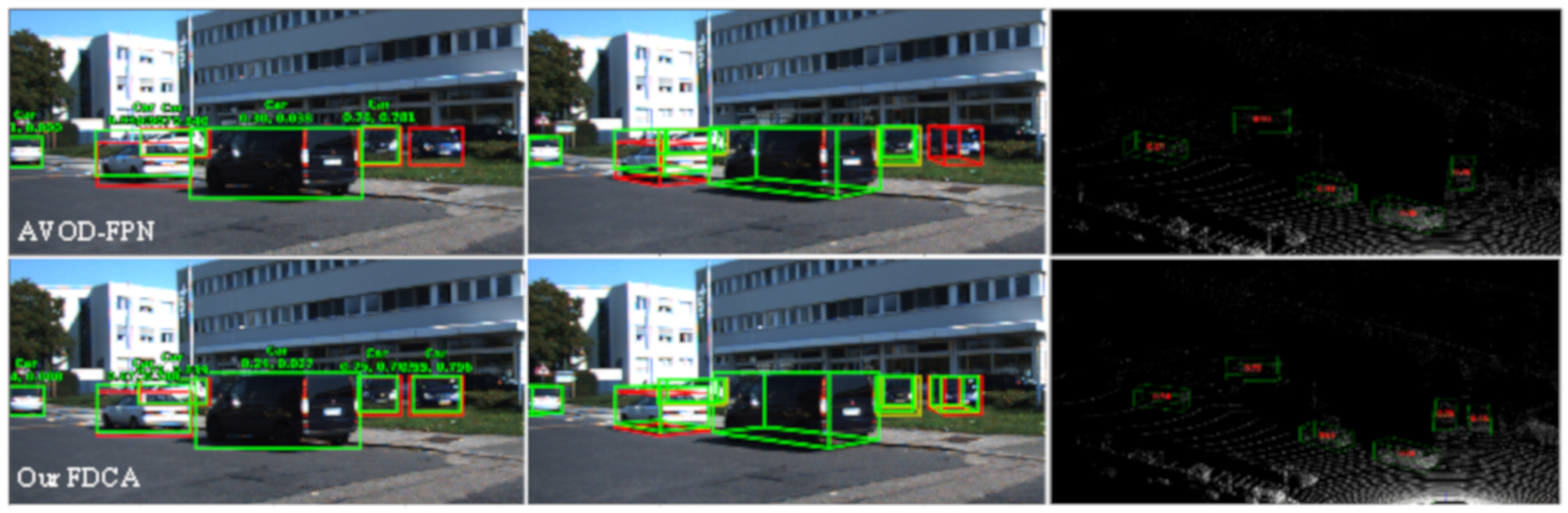
Figure 12 shows the visual results of AVOD-FPN and our proposed method in both image and 3D point cloud space. It can be seen that the missing vehicle in AVOD-FPN was detected correctly in our architecture and the regression accuracy of the 3D bounding boxes of our architecture was higher than that of AVOD-FPN.
4.2. Ablation Studies
Many ablation experiments have been done in view of the innovation in this paper. The results are shown in
Table 2,
Table 3 and
Table 4. In the baseline network, the BEV map had six channels, as seen in References [
6,
7], where the feature extractor and refinement network adopted a traditional FPN network and fully connected network without loss weight masks.
4.2.1. The Fusion Mode
References [
6,
7,
32] have different conclusions for three fusion modes. Schlosser et al. [
34] considers that the late fusion mode is best, while MV3D [
6] proposes the deep fusion mode, and AVOD [
7] considers that the early fusion mode is best. Considering the divergence on the conclusions of fusion modes, the performance of different fusion modes was compared in this paper. The results are shown in the first to third rows of
Table 3.
It can be concluded that the performance of the late fusion mode was only 68.06% AP on the moderate setting, which was evidently lower than that on the early and deep fusion mode. At the same time, the performance of the deep fusion mode was only higher by 0.4% and 0.21% than that of early mode on the easy and hard settings, respectively, and even lower by 0.14% on the moderate setting while undertaking more computation and having more parameters. Therefore, in the follow-up studies, early fusion mode was adopted in the second-stage refinement network.
4.2.2. BEV Map Representation
BEV is generated by projecting a raw point cloud into an overhead view, which inevitably causes information loss of objects. In Ku et al. [
7], the BEV map consists of five local height channels and a density channel, while the seven-channel BEV map generated in our architecture preserved the global and local height information of the object. The results are shown in
Table 2, where the seven-channel BEV map brings about a slight performance increase with 0.04% in the early setting and 0.29% on the deep setting (in the first and second rows). Similarly, the AP with a seven-channel BEV map outperformed that with a six-channel BEV by 0.24% on the basis of the proposed FDCA structure (in the third and fourth rows). This illustrates that our seven-channel BEV map was beneficial toward improving the detection performance for vehicles.
4.2.3. FDCA Structure
According to the comparison results in
Table 2 (row 1 and row 3, row 2 and row 4), it can be seen that compared with the FPN + FC structure, the FDCA structure could achieve a large gain of 0.97% with a six-channel BEV and 1.17% with a seven-channel BEV on a moderate setting. In the easy and hard settings, the performance with the FDCA structure was also much higher than that with the FPN + FC structure. The performance of AHS had the same trend in the three settings. We also did a comparison experiment with FDCA and FPN + FC structures in the deep fusion mode. In particular, we reduced the parameter number of each fully connected layer by half, and the result shows that the performance with FDCA was higher than that with FPN + FC by 0.79%. This proves that the parameters of the cascaded fully connected layer were redundant, causing a performance degradation. The above experiments show that our proposed FDCA structure could greatly improve the detection performance of the network. Through continuous and deep fusion for features, the generalization ability of the network and the utilization efficiency of parameters were strengthened.
4.2.4. Loss Weight Mask
The design of the loss function has a great influence on the performance of the detection network, especially in the 3D object detection network, where more output targets make it difficult to optimize. The performance gap of the network in 3D space and the overhead view indicates that the height regression accuracy of the bounding boxes is poor. Therefore, in this section, we set different values for the three loss weight masks to increase the weight of height loss in the total loss. The network adopted the seven-channel BEV map and FDCA structure, and the results are shown in
Table 4. For the three settings, the AP when the weight of the height information was set to 3 achieved a maximum gain of 0.46%, 1.22%, and 0.64% than that when the weight was set to 1. Therefore, based on the above experimental results, the weight value of high information was set to 3, and the results are also shown in the last line of
Table 2. From
Table 4, a conclusion can be drawn that the refined loss weight masks had a positive impact on the regression accuracy of the 3D bounding boxes.
4.2.5. Stability and Convergence
During the training stage, 120 training models were saved in total. We evaluated the 120 saved models using the validation set and obtained the AP of each model. The AP curves of the base network and ours are shown in
Figure 13.
As can be seen, our methods had a higher performance than the base network. First, from the AP3D of the first 30 models, our method converged faster than the base network. In addition, the AP3D curve of the base network had a large fluctuation in the later stage, while the AP3D curve of ours was more stable. We counted the AP3D performance of the last 40 models for the base network and ours, and the average and standard deviation of the baseline network were 71.73% and 2.48%, while the value of our method without loss weight mask were 74.46% and 0.97%, and the value of our method with loss weight mask were 75.44% and 0.53% respectively. Thus, the proposed method not only improved the AP performance, but also the stability and convergence rate.
4.2.6. PR Curve
Figure 14 shows the precision versus recall (PR) curves for our methods and the base network. It can be seen that our FDCF outperformed the base network by a wide margin.
5. Conclusions
In this work, we proposed FDCA_Net, a 3D vehicle detector based on multi-sensory data fusion for autonomous driving scenarios. First, a seven-channel BEV map was generated to enhance its representational ability for vehicles by aggregating local and global features. Second, we proposed feature deep continuous aggregation structure, and the generalization ability of the network was improved by continuous features and deep fusion at different stages. Furthermore, a light fully convolutional network was adopted to reduce the computation load and memory requirements in the 3D proposal generator. Finally, three refined loss weight masks were added to the loss function to improve the regression accuracy of the 3D bounding boxes. The comparable experiments using the KITTI validation set show that FDCA_Net achieved a good detection accuracy with real-time performance. The ablation experiments showed that the point cloud representation, feature deep continuous aggregation structure, and refined loss weight mask proposed in this paper had a positive impact on improving the detection performance of 3D vehicles. At the same time, the convergence speed and stability were greatly improved. This method is applicable to the urban scene (maximum speed 60 km/h) and detects vehicles within 70 m in front of the vehicle. The limitation of this method is that it cannot work normally in some extreme scenarios; for example, it cannot collect high-quality images in low light, and there are many noise points in the point cloud data under rainy or snowy weather. Thus, further work will involve improving the robustness of the detection system, especially when a sensor fails under extreme scenes, which will involve distinguishing and managing it for the detection system to get reliable detection results.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}