An Approach to a Clock Offsets Model for Real-Time PPP Time and Frequency Transfer During Data Discontinuity


Abstract
:1. Introduction
2. Method
2.1. The Observation Model
2.2. The Clock Model
- (1)
- (2)
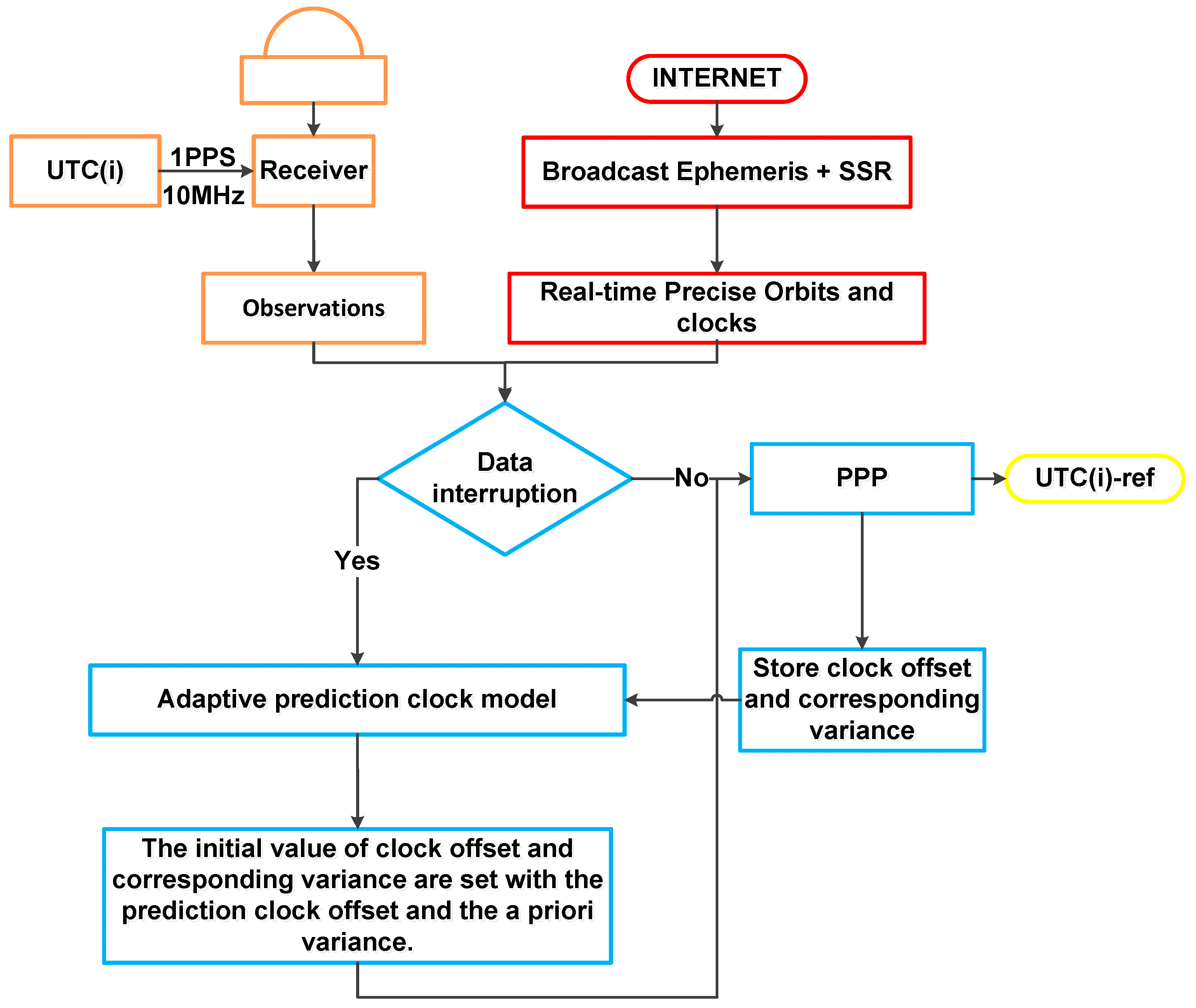
- If the data is not interrupted, it will go directly to RT-PPP processing to calculate the difference between the local time UTC (i) and the reference time (ref). Then, the clock offset, and the corresponding variance are stored. We use a sliding window with a window length of 240 data points to store the clock offset data. However, when data interruption occurs, we use the stored clock offset data to calculate the coefficient of the adaptive prediction model, and then predict the clock offset of the current epoch, with the current clock offset as a prior value, while setting the corresponding variance. Importantly, an a priori clock offset of 20 consecutive epochs is set to the predicted clock offset starting from the data, and the products are re-received to help ambiguity parameters to recover quickly and accurately. The detailed variance setting will be described in the next section.
3. Experimental Data and Processing Strategies
3.1. Experimental Data Sets
- (1)
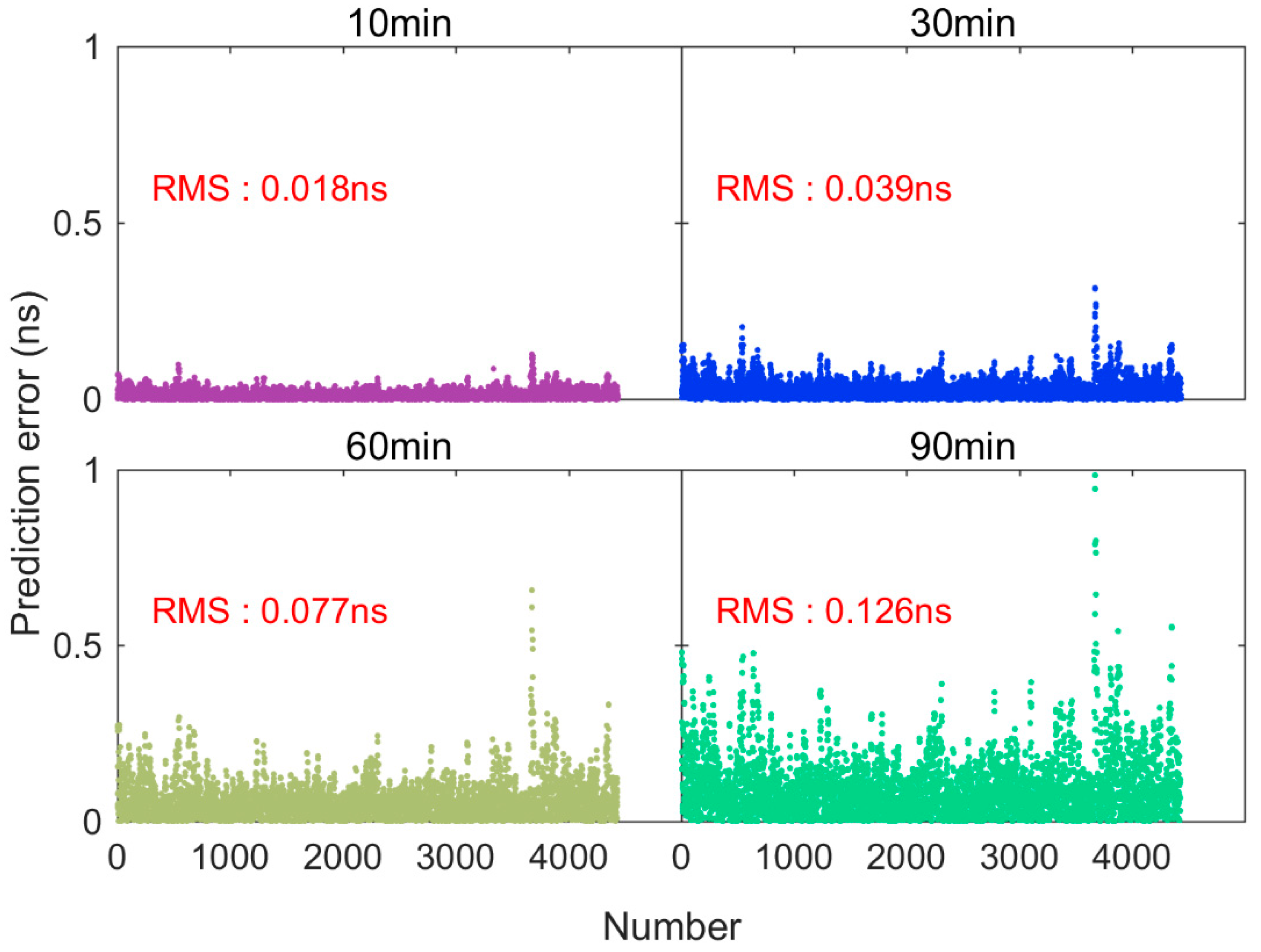
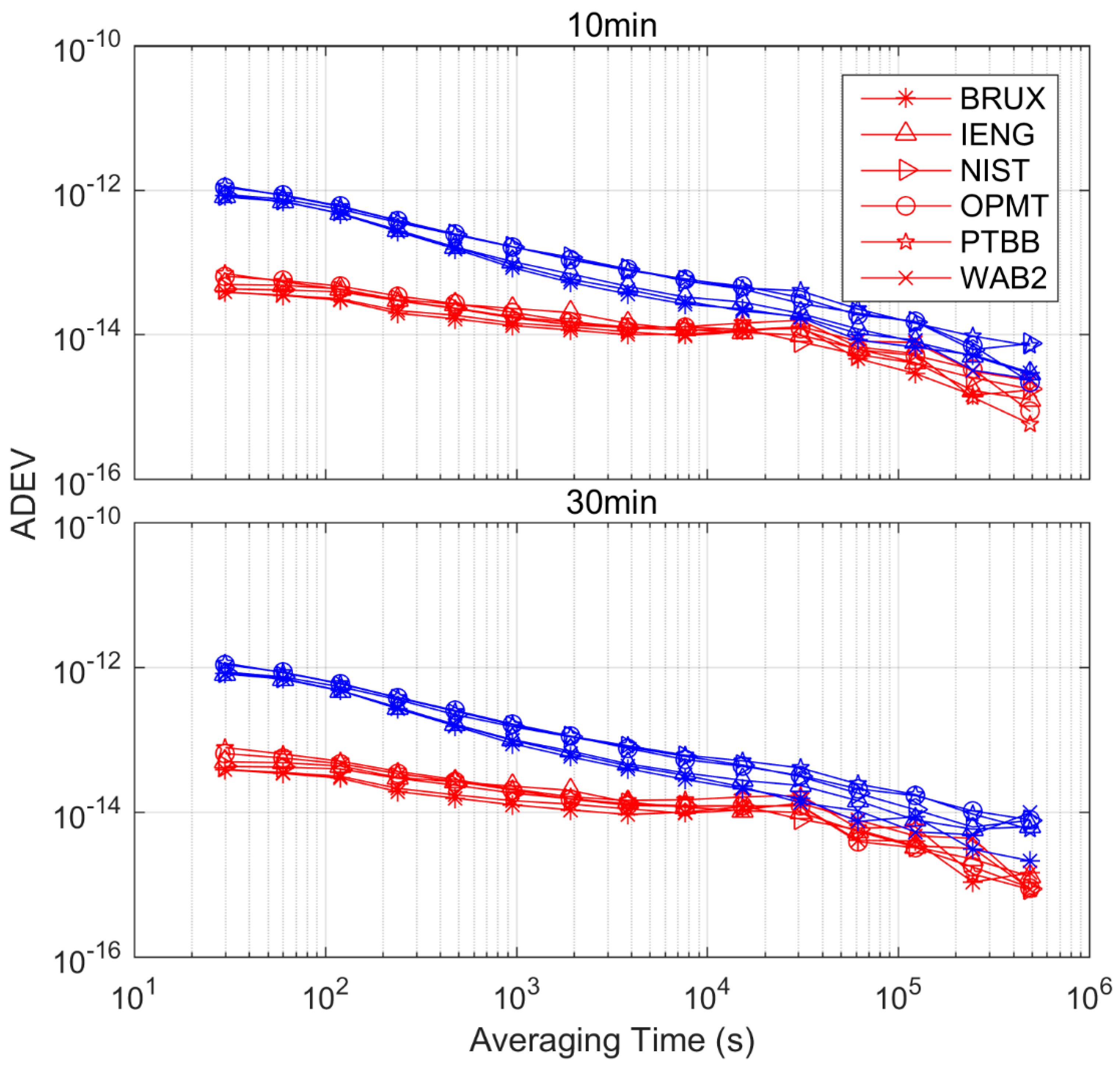
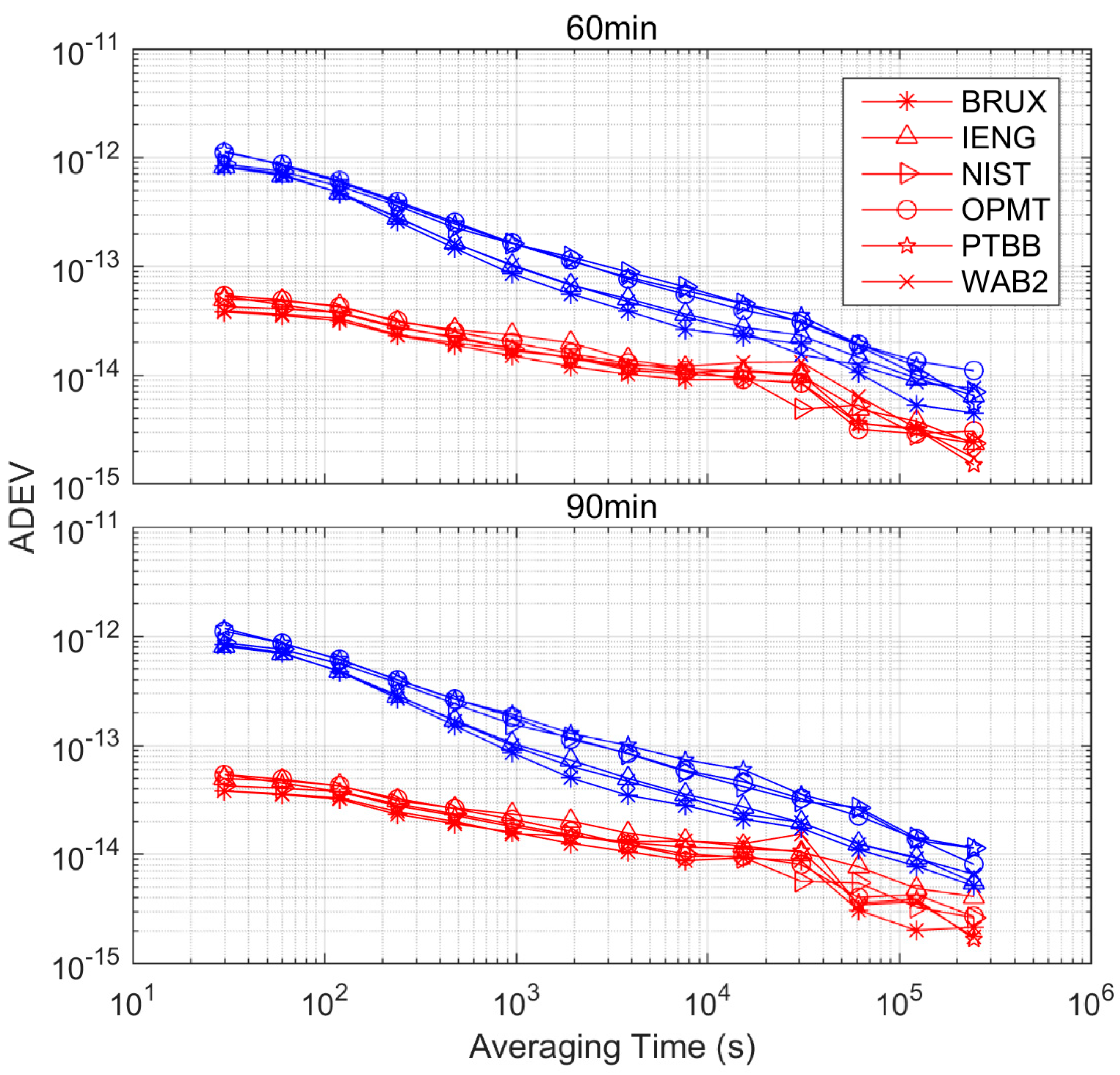
- Simulation data: The daily observations and products will be randomly interrupted four times for 10 min, 30 min, 60 min and 90 min, respectively. The precise orbit and clock products released by IGS are utilized in this part.
- (2)
- Real-time product: The real-time products used in this study were developed by GMV (GMV Aerospace and Defence) (CLK81).
3.2. Processing Strategy
- (1)
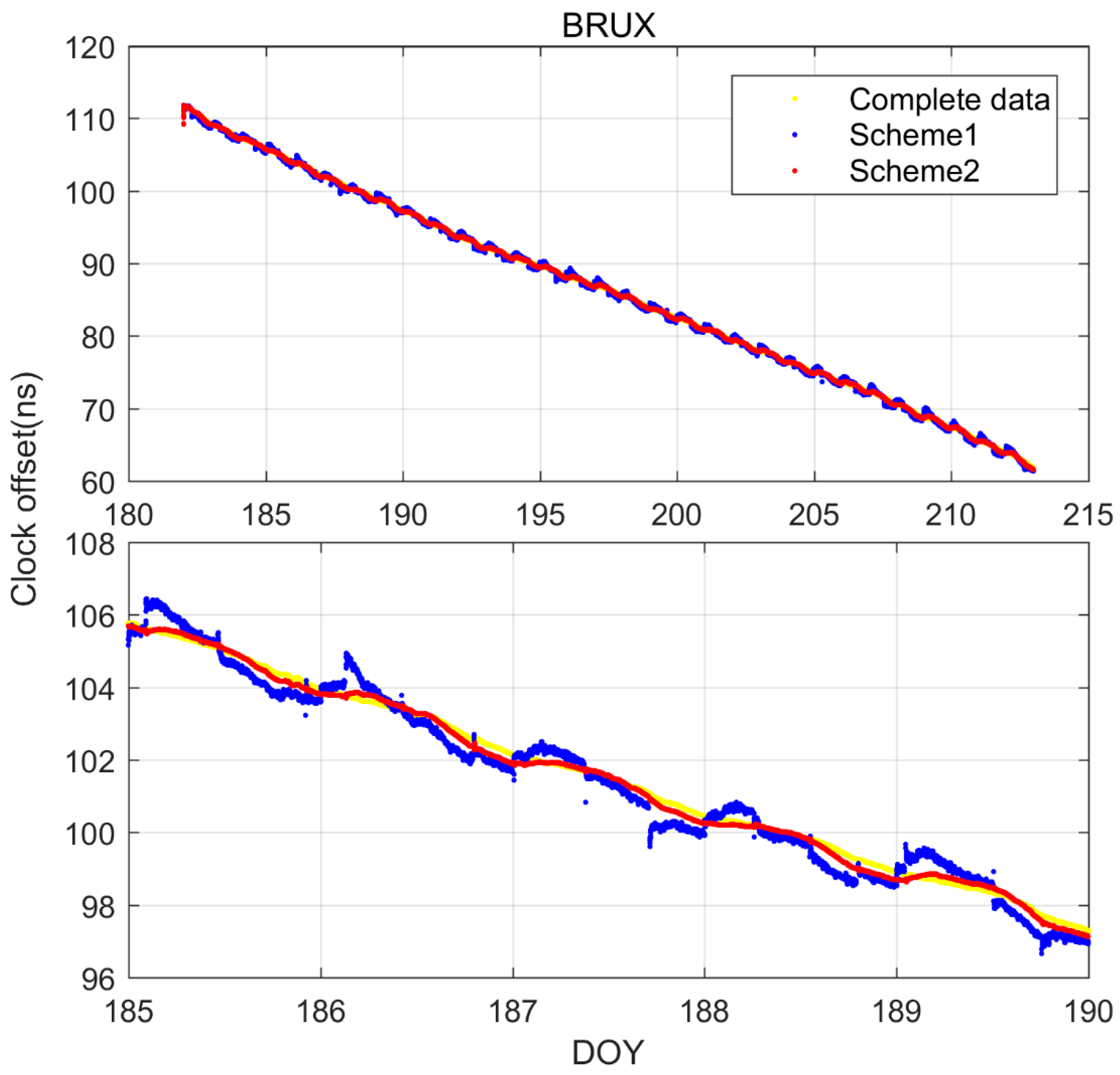
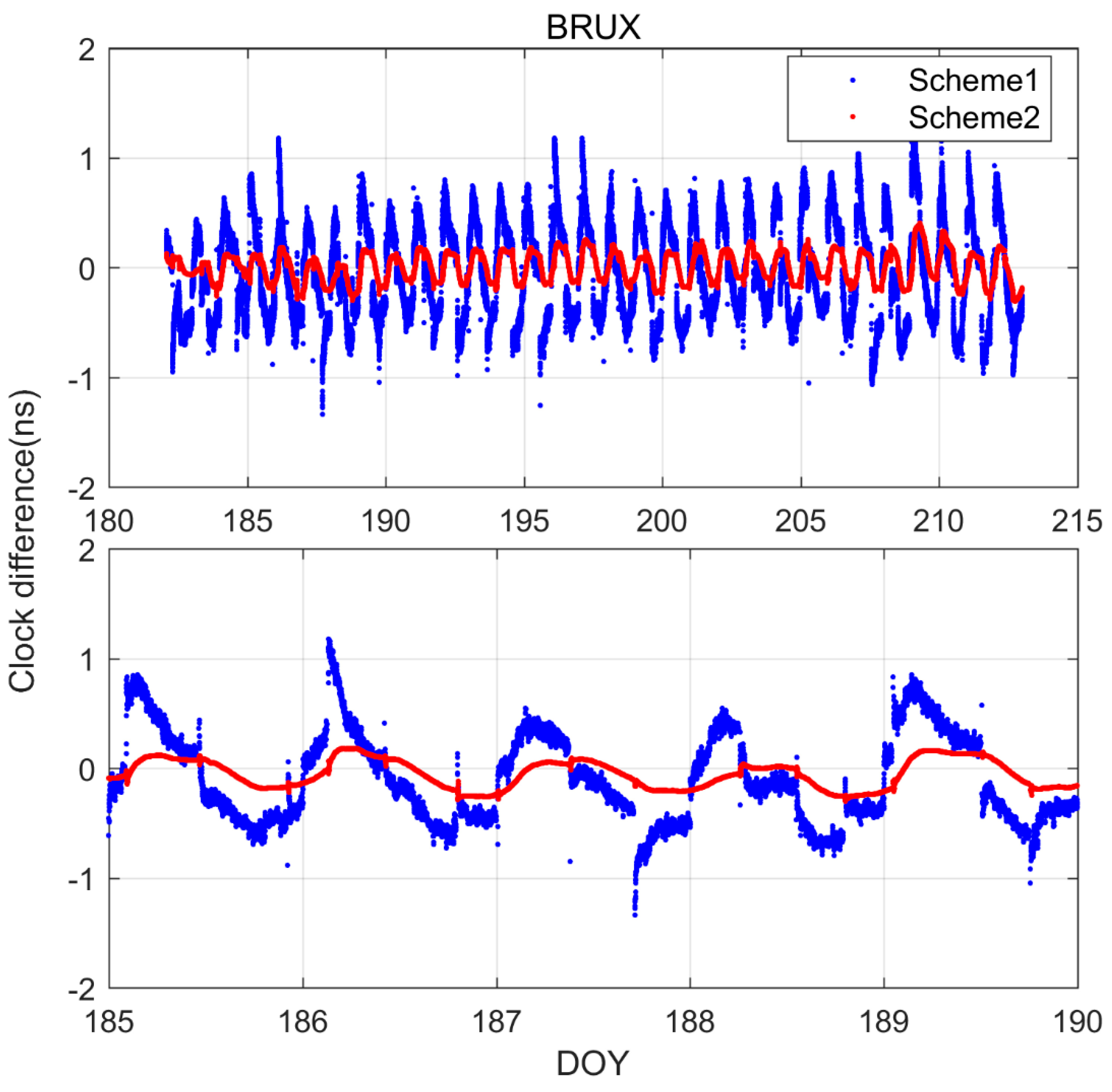
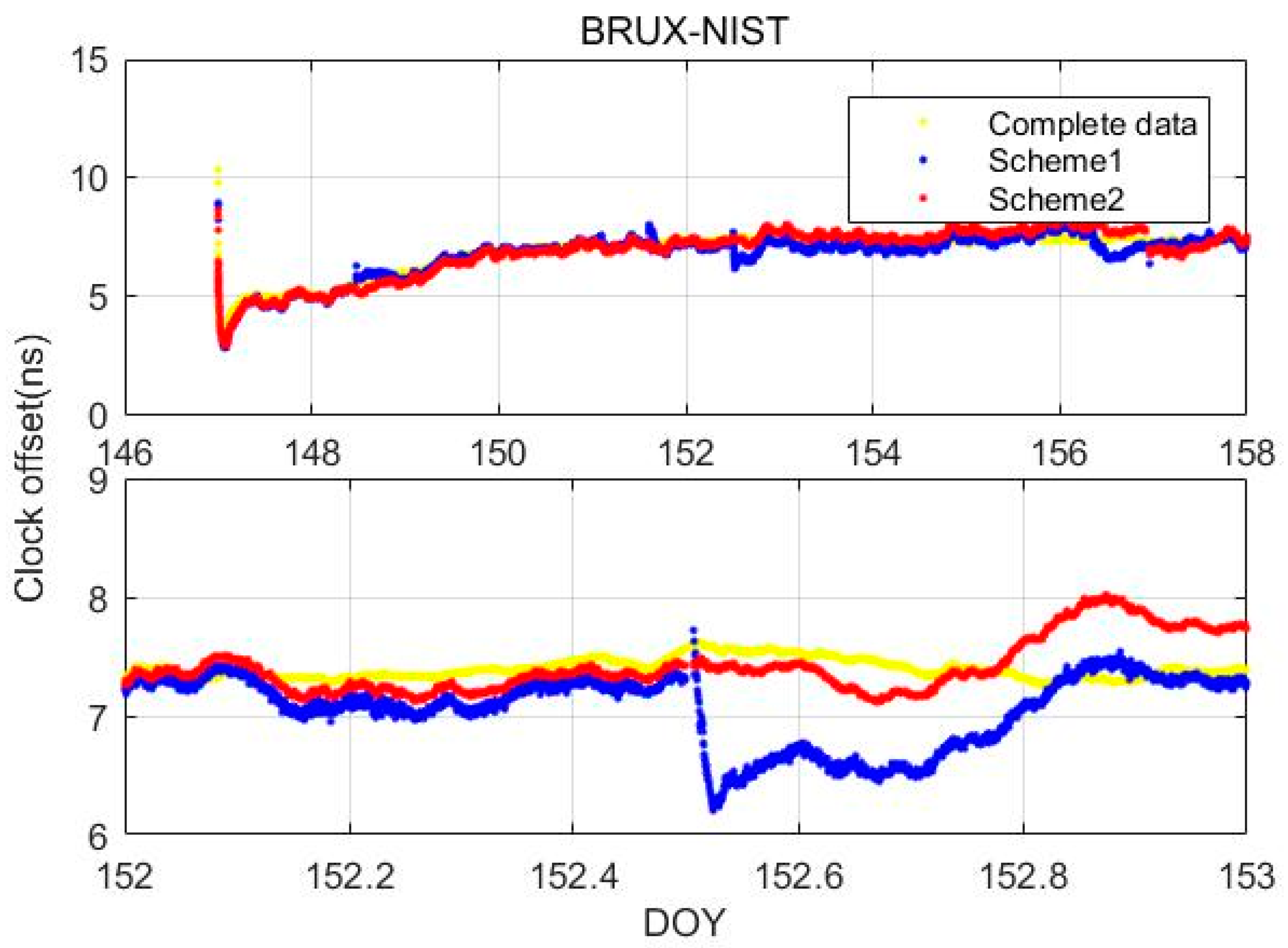
- Estimate clock offset with a white noise model (marked as scheme 1); and
- (2)
- Estimate clock offset with the between-epoch constraint model (marked as scheme 2).
4. Results and Analysis
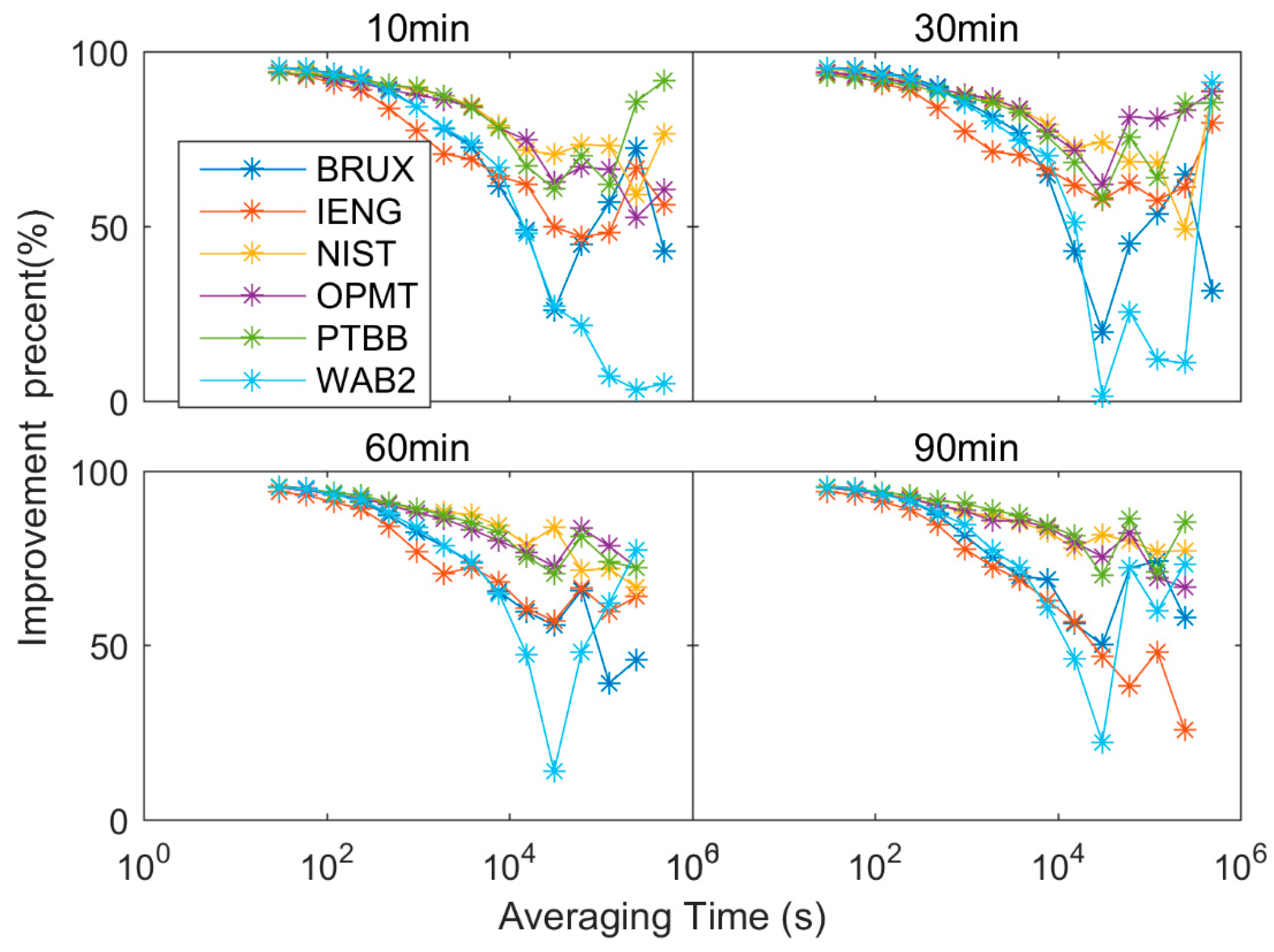
4.1. Results of the Simulation Data Set
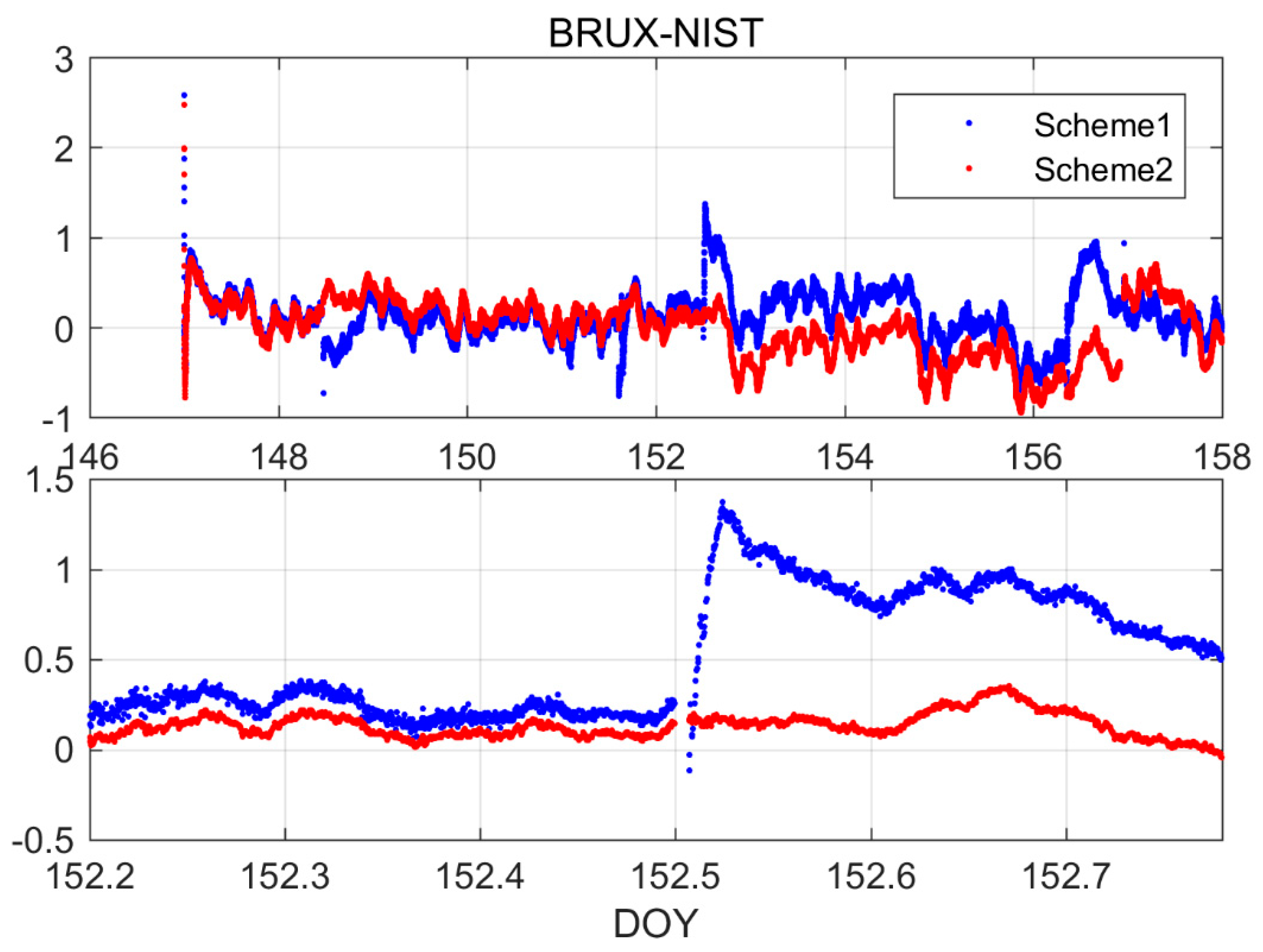
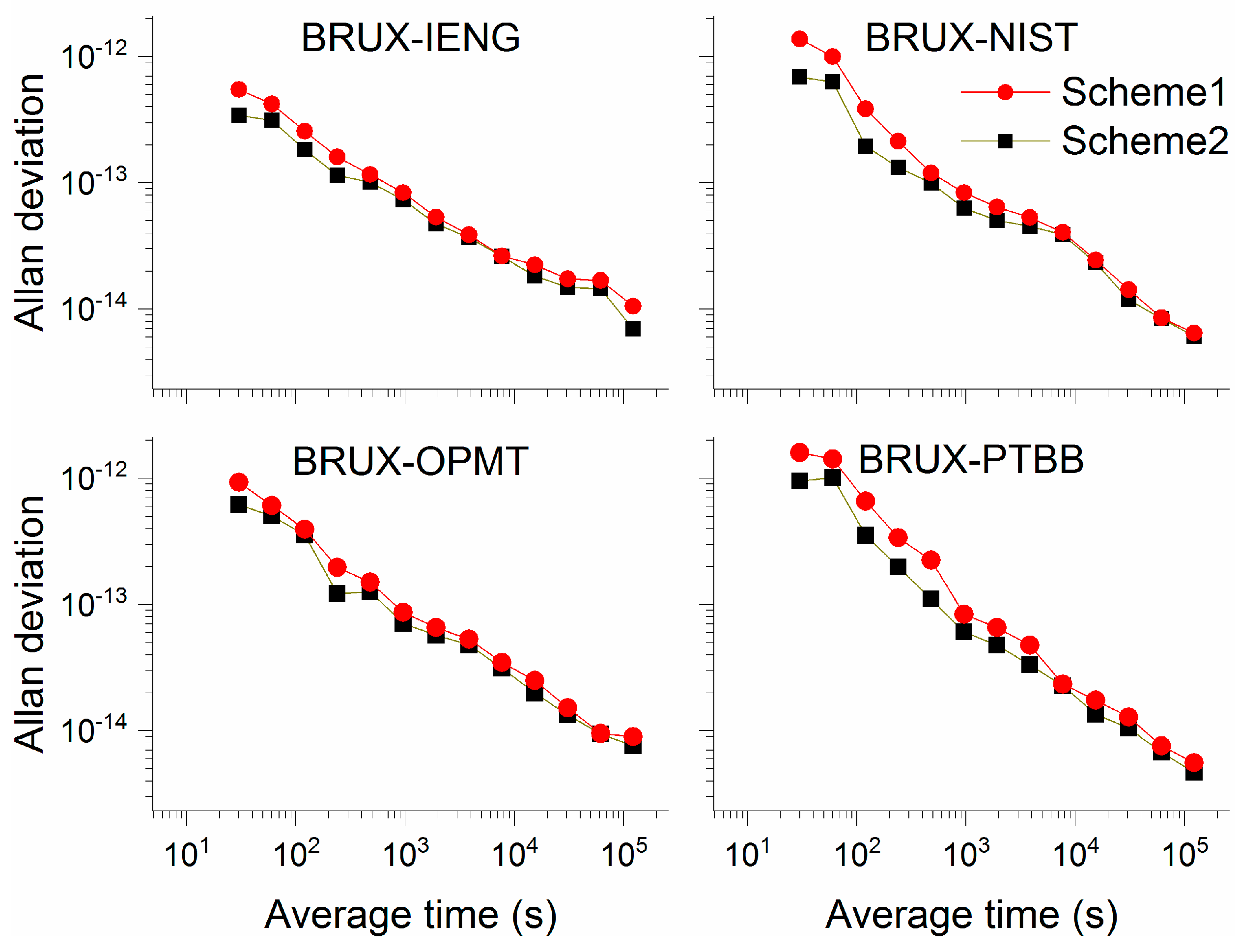
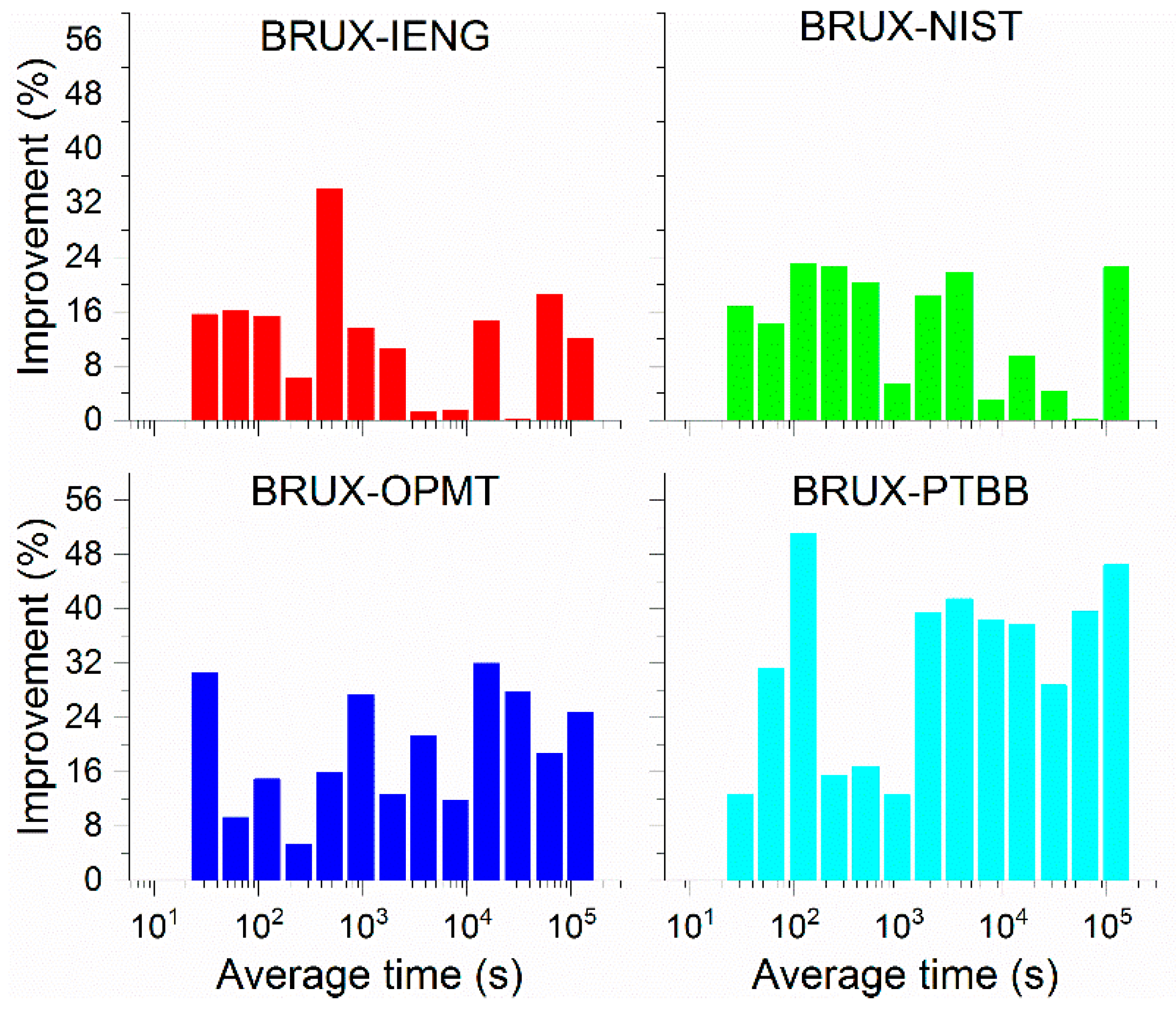
4.2. Results of the Real Data Set
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Allan, D.W.; Weiss, M.A. Accurate time and frequency transfer during common-view of a GPS satellite. In Proceedings of the 1980 IEEE Frequency Control Symposium, Philadelphia, PA, USA, 28–30 May 1980; pp. 334–356. [Google Scholar]
- Petit, G.; Jiang, Z. GPS All in View time transfer for TAI computation. Metrologia 2008, 45, 35–45. [Google Scholar] [CrossRef]
- Petit, G.; Jiang, Z. Precise Point Positioning for TAI Computation. Int. J. Navig. Obs. 2008, 2008, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Petit, G. The TAIPPP pilot experiment. In Frequency Control Symposium, 2009 Joint with the 22nd European Frequency and Time forum. IEEE Int. 2009, 1–2, 116–119. [Google Scholar]
- Petit, G.; Kanj, A.; Loyer, S.; Delporte, J.; Mercier, F.; Perosanz, F. 1 × 10−16 frequency transfer by GPS PPP with integer ambiguity resolution. Metrologia 2015, 52, 301–309. [Google Scholar] [CrossRef]
- Ge, Y.; Qin, W.; Cao, X.; Zhou, F.; Wang, S.; Yang, X. Consideration of GLONASS Inter-Frequency Code Biases in Precise Point Positioning (PPP) International Time Transfer. Appl. Sci. 2018, 8, 1254. [Google Scholar] [CrossRef]
- Ge, Y.; Yang, X.; Qin, W.; Su, H.; Wu, M.; Wang, Y.; Wang, S. Time Transfer Analysis of GPS- and BDS-Precise Point Positioning Based on iGMAS Products. China Satell. Navig. Conf. 2018, 497, 519–530. [Google Scholar]
- Tu, R.; Zhang, P.; Zhang, R.; Liu, J.; Lu, X. Approach for GPS precise time transfer using an augmentation information and zero-differenced PPP model. IET Radar Sonar Navig. 2018, 12, 801–806. [Google Scholar] [CrossRef]
- Zhang, P.; Tu, R.; Zhang, R.; Gao, Y.; Cai, H. Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sens. 2018, 10, 324. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2014, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ge, M.; Douša, J.; Wickert, J. Real-time precise point positioning regional augmentation for large GPS reference networks. GPS Solut. 2013, 18, 61–71. [Google Scholar] [CrossRef] [Green Version]
- Laurichesse, D.; Mercier, F.; Berthias, J.P. Real time precise GPS constellation orbits and clocks estimation using zero-difference integer ambiguity fixing. In Proceedings of the 2009 International Technical Meeting of the Institute of Navigation, Anaheim, CA, USA, 26–28 January 2009; pp. 664–672. [Google Scholar]
- Zhang, P.; Tu, R.; Gao, Y.; Liu, N.; Zhang, R. Improving Galileo’s Carrier-Phase Time Transfer Based on Prior Constraint Information. J. Navig. 2019, 72, 121–139. [Google Scholar] [CrossRef]
- Li, G.; Lin, Y.; Shi, F.; Liu, J.; Yang, Y.; Shi, J. Using IGS RTS Products for Real-Time Subnanosecond Level Time Transfer. China Satell. Navig. Conf. 2018, 497, 505–518. [Google Scholar]
- Defraigne, P.; Aerts, W.; Pottiaux, E. Monitoring of UTC(k)’s using PPP and IGS real-time products. GPS Solut. 2014, 19, 165–172. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O. Kalman-filter-based GPS clock estimation for near real-time positioning. GPS Solut. 2008, 13, 173–182. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Dong, D.; Ge, M.; Li, P.; Wickert, J.; Schuh, H. Simultaneous estimation of GLONASS pseudorange inter-frequency biases in precise point positioning using undifferenced and uncombined observations. GPS Solut. 2017, 22, 19. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orienation on GPS carrier phase. Manuscr. Geod. 1992, 18, 91–98. [Google Scholar]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkulin, R.; Kogure, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Hutsell, S. Relating the Hadamard Variance to MCS Kalman Filter Clock Estimation. In Proceedings of the 27th Annual PTTI Systems Applications Meeting, San Diego, CA, USA, 29 November–1 December 1995; pp. 291–301. [Google Scholar]
- Wang, K.; Rothacher, M. Stochastic modeling of high-stability ground clocks in GPS analysis. J. Geod. 2013, 87, 427–437. [Google Scholar] [CrossRef]
- Kazmierski, K.; Sośnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2017, 22, 11. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of Multiple GNSS Real-Time SSR Products from Different Analysis Centers. ISPRS Int. J. Geo-Inf. 2018, 7, 85. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Gao, Y.; Yao, Y.; Xu, C. Evaluation and analysis of real-time precise orbits and clocks products from different IGS analysis centers. Adv. Space Res. 2018, 61, 2942–2954. [Google Scholar] [CrossRef]
- Guang, W.; Dong, S.; Wu, W.; Zhang, J.; Yuan, H.; Zhang, S. Progress of BeiDou time transfer at NTSC. Metrologia 2018, 55, 175–187. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Strategies |
|---|---|
| Estimator | Kalman filtering |
| Relativistic effect | IERS conventions 2010 |
| Sagnac effect | IERS conventions 2010 |
| Phase wind-up | Corrected by model |
| Tide displacements | IERS conventions 2010 |
| Tropospheric delay | ZHD: corrected with global pressure and temperature (GPT) model using the formulas of Saastamoninen |
| ZWD: estimated as a continuous piecewise linear function (2 h parameter spacing), GMF mapping function | |
| Satellite antenna PCOs and PCVs | IGS “*.atx” file |
| Station | Receiver | Antenna | Clock | Distance from BRUX (km) |
|---|---|---|---|---|
| BRUX | SEPT POLARX4TR | JAVRINGANT_DM | CH1-75A MASER | - |
| PTBB | SEPT POLARX4TR | LEIAR25.R4 LEIT | H-MASER | 454.88 |
| OPMT | ASHTECH Z-XII3T | 3S-02-TSADM | UTC(OP) | 262.33 |
| WAB2 | ASHTECH Z-XII3T | ASH700936F_C | UTC(CH) MASTER | 487.20 |
| IENG | ASHTECH Z-XII3T | ASH701945C_M | H-MASER | 687.69 |
| NIST | NOV OEM4-G2 | NOV702 | H-MASER | 7365.98 |
| 10 min | 30 min | 60 min | 90 min | |
|---|---|---|---|---|
| BRUX | 0.018 | 0.039 | 0.077 | 0.126 |
| IENG | 0.049 | 0.097 | 0.182 | 0.290 |
| NIST | 0.025 | 0.052 | 0.102 | 0.166 |
| OPMT | 0.029 | 0.057 | 0.112 | 0.183 |
| PTBB | 0.024 | 0.049 | 0.100 | 0.159 |
| WAB2 | 0.035 | 0.054 | 0.100 | 0.152 |
| 10 min | 30 min | 60 min | 90 min | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sch1 | Sch2 | (%) | Sch1 | Sch2 | (%) | Sch1 | Sch2 | (%) | Sch1 | Sch2 | (%) | |
| BRUX | 0.44 | 0.14 | 68.64 | 0.43 | 0.14 | 67.99 | 0.46 | 0.16 | 65.22 | 0.45 | 0.18 | 59.93 |
| IENG | 0.40 | 0.11 | 71.43 | 0.41 | 0.17 | 58.38 | 0.39 | 0.18 | 53.52 | 0.41 | 0.22 | 46.34 |
| NIST | 0.40 | 0.15 | 61.71 | 0.40 | 0.14 | 64.49 | 0.39 | 0.16 | 60.31 | 0.44 | 0.21 | 51.67 |
| OPMT | 0.50 | 0.19 | 61.99 | 0.51 | 0.18 | 64.89 | 0.49 | 0.20 | 58.70 | 0.51 | 0.20 | 59.71 |
| PTBB | 0.52 | 0.15 | 71.22 | 0.53 | 0.15 | 72.06 | 0.52 | 0.18 | 65.38 | 0.51 | 0.23 | 54.10 |
| WAB2 | 0.36 | 0.15 | 58.48 | 0.37 | 0.15 | 58.72 | 0.36 | 0.23 | 36.11 | 0.37 | 0.26 | 30.96 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, W.; Ge, Y.; Wei, P.; Yang, X. An Approach to a Clock Offsets Model for Real-Time PPP Time and Frequency Transfer During Data Discontinuity. Appl. Sci. 2019, 9, 1405. https://doi.org/10.3390/app9071405
Qin W, Ge Y, Wei P, Yang X. An Approach to a Clock Offsets Model for Real-Time PPP Time and Frequency Transfer During Data Discontinuity. Applied Sciences. 2019; 9(7):1405. https://doi.org/10.3390/app9071405
Chicago/Turabian StyleQin, Weijin, Yulong Ge, Pei Wei, and Xuhai Yang. 2019. "An Approach to a Clock Offsets Model for Real-Time PPP Time and Frequency Transfer During Data Discontinuity" Applied Sciences 9, no. 7: 1405. https://doi.org/10.3390/app9071405