
A Comparative Study of Automatic Localization Algorithms for Spherical Markers within 3D MRI Data

 , , , , , and
, , , , , and
Abstract
:
1. Introduction
2. Material and Methods
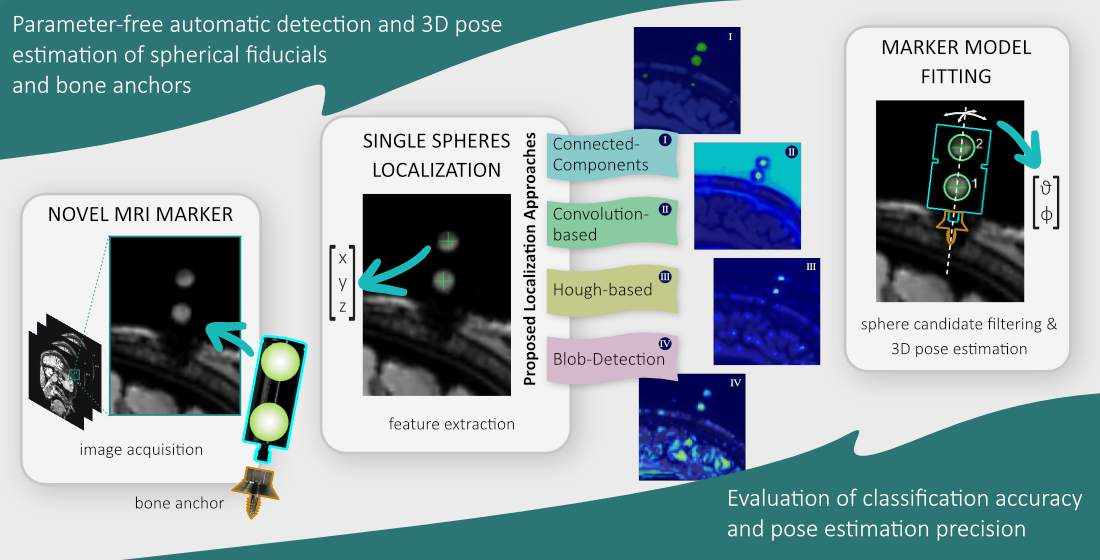
2.1. Marker Model and Design
2.2. Image Acquisition
2.3. Image Processing Pipeline
2.4. Circular Hough Transform Approach
2.5. Convolution-Based Approach
2.6. Connected Component Labeling and Analysis Approach
2.7. Blob Detection Related Approach
3. Results
4. Discussion
4.1. Influence of the Imaging Modality
4.2. Influence of the Voxel Size
4.3. Influence of the Marker Model
4.4. Error of Orientation Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kremser, C.; Plangger, C.; Bösecke, R.; Pallua, A.; Aichner, F.; Felber, S.R. Image registration of MR and CT images using a frameless fiducial marker system. Magn. Reson. Imaging 1997, 15, 579–585. [Google Scholar] [CrossRef]
- Mohammadian, S.; Fokkema, J.; Agronskaia, A.V.; Liv, N.; de Heus, C.; van Donselaar, E.; Blab, G.A.; Klumperman, J.; Gerritsen, H.C. High accuracy, fiducial marker-based image registration of correlative microscopy images. Sci. Rep. 2019, 9, 3211. [Google Scholar] [CrossRef]
- Lestriandoko, N.H.; Sadikin, R. Circle detection based on hough transform and Mexican Hat filter. In Proceedings of the 2016 International Conference on Computer, Control, Informatics and Its Applications (IC3INA), Jakarta, Indonesia, 3–5 October 2016; pp. 153–157. [Google Scholar]
- Fitzpatrick, J.M. The role of registration in accurate surgical guidance. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2010, 224, 607–622. [Google Scholar] [CrossRef] [Green Version]
- Alam, F.; Rahman, S.U.; Ullah, S.; Gulati, K. Medical image registration in image guided surgery: Issues, challenges and research opportunities. Biocybern. Biomed. Eng. 2018, 38, 71–89. [Google Scholar] [CrossRef]
- Zitova, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.Y.; Maurer, C.R.; Fitzpatrick, J.M.; Maciunas, R.J. An automatic technique for finding and localizing externally attached markers in CT and MR volume images of the head. IEEE Trans. Biomed. Eng. 1996, 43, 627–637. [Google Scholar] [CrossRef]
- Tan, J.; Chen, D.; Chaudhary, V.; Sethi, I. A template based technique for automatic detection of fiducial markers in 3D brain images. Int. J. Comput. Assist. Radiol. Surg. 2006, 1, 47. [Google Scholar]
- Chen, D.; Tan, J.; Chaudhary, V.; Sethi, I.K. Automatic fiducial localization in brain images. Int. J. Comput. Assist. Radiol. Surg. 2006, 1, 45. [Google Scholar]
- Lewis, J.T.; Galloway, R.; Schreiner, S. An ultrasonic approach to localization of fiducial markers for interactive, image-guided neurosurgery. I. Principles. IEEE Trans. Biomed. Eng. 1998, 45, 620–630. [Google Scholar] [CrossRef]
- Adams, L.; Krybus, W.; Meyer-Ebrecht, D.; Rueger, R.; Gilsbach, J.M.; Moesges, R.; Schloendorff, G. Computer-assisted surgery. IEEE Comput. Graph. Appl. 1990, 10, 43–51. [Google Scholar] [CrossRef]
- Galloway, R.L.; Maciunas, R.J.; Bass, W.A.; Crouch, D. An optical device for interactive, image-guided neurosurgery. In Proceedings of the 15th Annual International Conference of the IEEE Engineering in Medicine and Biology Societ, San Diego, CA, USA, 28–31 October 1993; pp. 954–955. [Google Scholar]
- Kato, A.; Yoshimine, T.; Hayakawa, T.; Tomita, Y.; Ikeda, T.; Mitomo, M.; Harada, K.; Mogami, H. A frameless, armless navigational system for computer-assisted neurosurgery. J. Neurosurg. 1991, 74, 845–849. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough Transformation to Detect Lines and Curves in Pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Vosselman, G.; Gorte, B.G.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Tombari, F.; Di Stefano, L. Object recognition in 3d scenes with occlusions and clutter by hough voting. In Proceedings of the 2010 Fourth Pacific-Rim Symposium on Image and Video Technology, Singapore, 14–17 November 2010; pp. 349–355. [Google Scholar]
- Kimme, C.; Ballard, D.; Sklansky, J. Finding circles by an array of accumulators. Commun. ACM 1975, 18, 120–122. [Google Scholar] [CrossRef]
- Pedersen, S.J.K. Circular Hough Transform. In Encyclopedia of Biometrics; Li, S.Z., Jain, A., Eds.; Springer: Boston, MA, USA, 2009; p. 181. [Google Scholar] [CrossRef]
- Rosenfeld, A.; Pfaltz, J.L. Sequential operations in digital picture processing. J. ACM 1966, 13, 471–494. [Google Scholar] [CrossRef]
- Shapiro, L.G. Connected component labeling and adjacency graph construction. Mach. Intell. Pattern Recognit. 1996, 19, 1–30. [Google Scholar]
- Dillencourt, M.B.; Samet, H.; Tamminen, M. A general approach to connected-component labeling for arbitrary image representations. J. ACM 1992, 39, 253–280. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Liu, D.; Yu, J. Otsu method and K-means. In Proceedings of the 2009 Ninth International Conference on Hybrid Intelligent Systems, Shenyang, China, 12–14 August 2009; Volume 1, pp. 344–349. [Google Scholar]
- Lehmann, G. Label object representation and manipulation with ITK. Insight J 2007, 8, 1–31. [Google Scholar]
- Danker, A.J.; Rosenfeld, A. Blob Detection by Relaxation. IEEE Trans. Pattern Anal. Mach. Intell. 1981, PAMI-3, 79–92. [Google Scholar] [CrossRef]
- Xiong, X.; Choi, B.J. Comparative analysis of detection algorithms for corner and blob features in image processing. Int. J. Fuzzy Log. Intell. Syst. 2013, 13, 284–290. [Google Scholar] [CrossRef]
- Lindeberg, T. Image matching using generalized scale-space interest points. In Proceedings of the International Conference on Scale Space and Variational Methods in Computer Vision, Leibnitz, Austria, 2–6 June 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 355–367. [Google Scholar]
- Lindeberg, T. Image matching using generalized scale-space interest points. J. Math. Imaging Vis. 2015, 52, 3–36. [Google Scholar] [CrossRef] [Green Version]
- Marsh, B.P.; Chada, N.; Gari, R.R.S.; Sigdel, K.P.; King, G.M. The Hessian blob algorithm: Precise particle detection in atomic force microscopy imagery. Sci. Rep. 2018, 8, 978. [Google Scholar] [CrossRef] [Green Version]
- Lindeberg, T. Scale-Space Theory in Computer Vision; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Hu, M.K. Visual pattern recognition by moment invariants. IRE Trans. Inf. Theory 1962, 8, 179–187. [Google Scholar]
- Salvador, S.; Chan, P. Determining the number of clusters/segments in hierarchical clustering/segmentation algorithms. In Proceedings of the 16th IEEE International Conference on Tools with Artificial Intelligence, Boca Raton, FL, USA, 5–17 November 2004; pp. 576–584. [Google Scholar]
- Dice, L.R. Measures of the amount of ecologic association between species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Gu, L.; Peters, T. 3D automatic fiducial marker localization approach for frameless stereotactic neuro-surgery navigation. In Proceedings of the International Workshop on Medical Imaging and Augmented Reality, Beijing, China, 19–20 August 2004; Springer: Berlin/Heidelberg, Germany, 2004; pp. 329–336. [Google Scholar]
- Wang, M.; Song, Z. Automatic localization of the center of fiducial markers in 3D CT/MRI images for image-guided neurosurgery. Pattern Recognit. Lett. 2009, 30, 414–420. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mod | s [mm] | CCA | Kernel | Hough | Blob | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| tp | fp | fn | tp | fp | fn | tp | fp | fn | tp | fp | fn | ||||||||||
| T1 | 0.6 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 1 | 0 | 0.95 | 1.00 | 10 | 9 | 0 | 0.69 | 1.00 | 10 | 6 | 0 | 0.77 | 1.00 |
| T1 | 0.8 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 3 | 0 | 0.87 | 1.00 | 10 | 38 | 0 | 0.34 | 0.53 |
| T1 | 1.0 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 3 | 0 | 0.87 | 0.89 | 10 | 0 | 0 | 1.00 | 1.00 |
| T1 | 1.2 | 9 | 0 | 1 | 0.95 | 0.89 | 10 | 0 | 0 | 1.00 | 0.75 | 10 | 20 | 0 | 0.50 | 0.80 | 10 | 1 | 0 | 0.95 | 1.00 |
| T1 | 1.4 | 9 | 0 | 1 | 0.95 | 0.89 | 3 | 1 | 7 | 0.43 | 0.00 | 10 | 16 | 0 | 0.56 | 0.89 | 10 | 1 | 0 | 0.95 | 1.00 |
| T1 | 1.6 | 9 | 3 | 1 | 0.82 | 0.89 | 5 | 0 | 5 | 0.67 | 0.33 | 10 | 20 | 0 | 0.50 | 0.89 | 10 | 0 | 0 | 1.00 | 1.00 |
| T2 | 0.6 | 10 | 1 | 0 | 0.95 | 1.00 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 2 | 0 | 0.91 | 0.91 | 10 | 87 | 0 | 0.19 | 0.40 |
| T2 | 0.8 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 1 | 0 | 0.95 | 1.00 | 10 | 3 | 0 | 0.87 | 0.91 | 10 | 60 | 0 | 0.25 | 0.53 |
| T2 | 1.0 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 0 | 0 | 1.00 | 1.00 | 10 | 1 | 0 | 0.95 | 1.00 | 10 | 0 | 0 | 1.00 | 1.00 |
| T2 | 1.2 | 10 | 1 | 0 | 0.95 | 1.00 | 7 | 0 | 3 | 0.82 | 0.75 | 10 | 1 | 0 | 0.95 | 0.57 | 10 | 0 | 0 | 1.00 | 0.89 |
| T2 | 1.4 | 10 | 1 | 0 | 0.95 | 1.00 | 7 | 0 | 3 | 0.82 | 0.75 | 10 | 2 | 0 | 0.91 | 0.89 | 10 | 76 | 0 | 0.21 | 0.43 |
| T2 | 1.6 | 10 | 3 | 0 | 0.87 | 0.91 | 5 | 0 | 5 | 0.67 | 0.33 | 10 | 6 | 0 | 0.77 | 1.00 | 10 | 2 | 0 | 0.91 | 0.89 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiedler, C.; Jacobs, P.-P.; Müller, M.; Kolbig, S.; Grunert, R.; Meixensberger, J.; Winkler, D. A Comparative Study of Automatic Localization Algorithms for Spherical Markers within 3D MRI Data. Brain Sci. 2021, 11, 876. https://doi.org/10.3390/brainsci11070876
Fiedler C, Jacobs P-P, Müller M, Kolbig S, Grunert R, Meixensberger J, Winkler D. A Comparative Study of Automatic Localization Algorithms for Spherical Markers within 3D MRI Data. Brain Sciences. 2021; 11(7):876. https://doi.org/10.3390/brainsci11070876
Chicago/Turabian StyleFiedler, Christian, Paul-Philipp Jacobs, Marcel Müller, Silke Kolbig, Ronny Grunert, Jürgen Meixensberger, and Dirk Winkler. 2021. "A Comparative Study of Automatic Localization Algorithms for Spherical Markers within 3D MRI Data" Brain Sciences 11, no. 7: 876. https://doi.org/10.3390/brainsci11070876
APA StyleFiedler, C., Jacobs, P.-P., Müller, M., Kolbig, S., Grunert, R., Meixensberger, J., & Winkler, D. (2021). A Comparative Study of Automatic Localization Algorithms for Spherical Markers within 3D MRI Data. Brain Sciences, 11(7), 876. https://doi.org/10.3390/brainsci11070876