1. Introduction
In recent years, more patients have needed to undergo pedicle screw fixation due to a variety of spinal pathologies [
1,
2], and screw implantation accuracy is critical. As an auxiliary medical device, surgical robots can improve the accuracy and safety of surgery and are increasingly favored by doctors [
3,
4]. For example, the Da Vinci robot has been widely used in general surgery [
5], urology [
6], gynecology [
7], and other fields. Robot-assisted spinal surgery has also been applied in clinical practice [
8]. It has been confirmed to be superior to manual operations in terms of safety, accuracy, the amount of radiation to surgeons, and the learning curve [
9,
10].
At present, many spinal surgery robots have been developed in the world, such as Mazor X
® (Mazor Robotics Ltd., Caesarea, Israel), ROSA
® SPINE (Zimmer Biomet Robotics, Montpellier, France), and Excelsius GPS
® (Globus Medical, Inc., Audubon, PA, USA) [
11]. The TiRobot system (TINAVI Medical Technologies Co., Ltd., Beijing, China) is the first orthopedic robot created entirely in China. It was approved by the China Food and Drug Administration in 2016. The TiRobot device has a tracking-capable robotic arm combined with an intraoperative three-dimensional (3D) navigation system [
12,
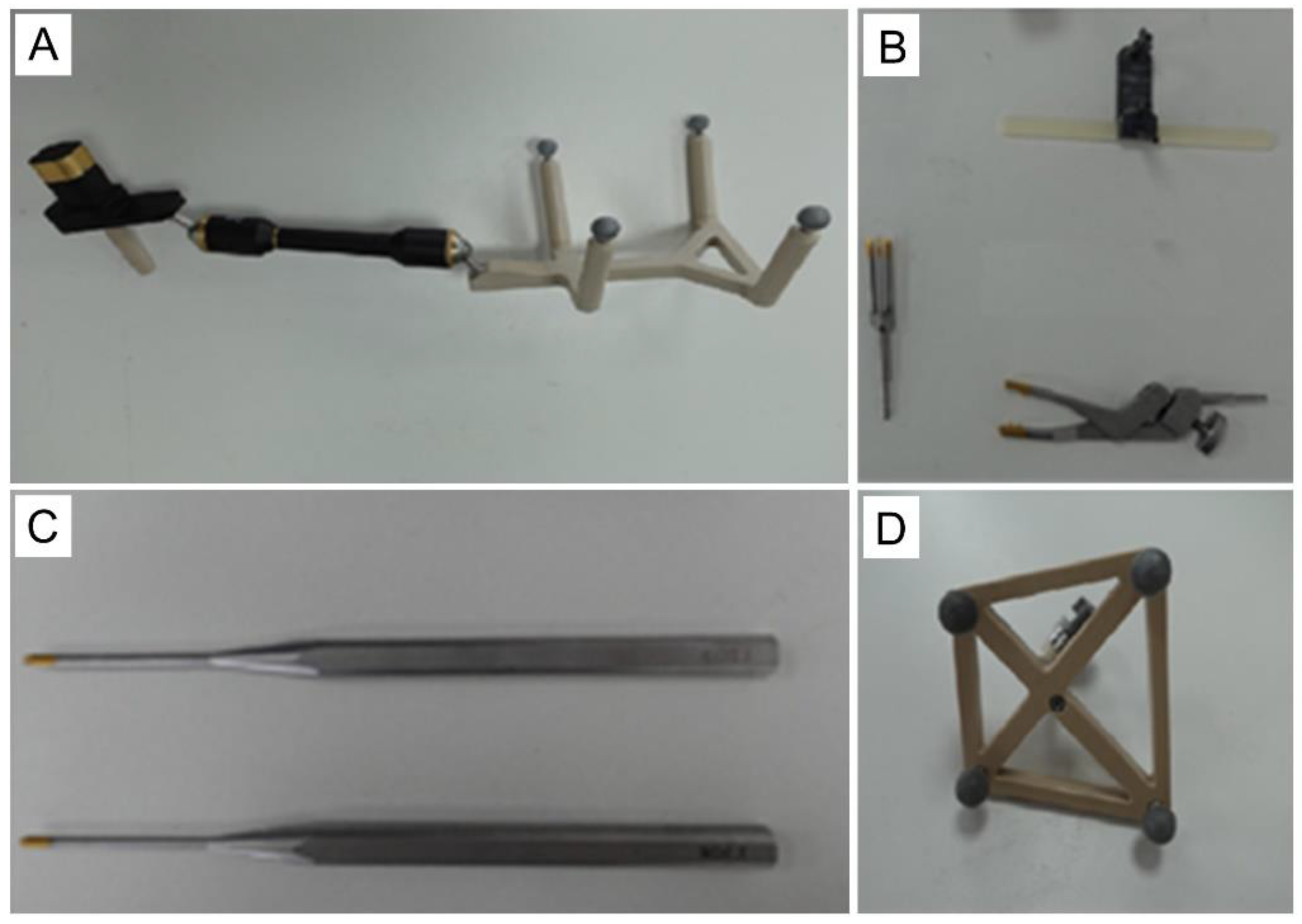
13]. After acquiring images preoperatively and planning the desired screw trajectory, the surgeon manually performs drilling and screw insertion. However, the TiRobot has some shortcomings, including trauma caused by its tracker, and slightly complicated operation procedures. Therefore, our team independently developed a new orthopedic robot (Tuoshou, Nanjing Tuodao Medical Technology Co., Ltd., Nanjing, China) to address the challenges associated with the existing robots.
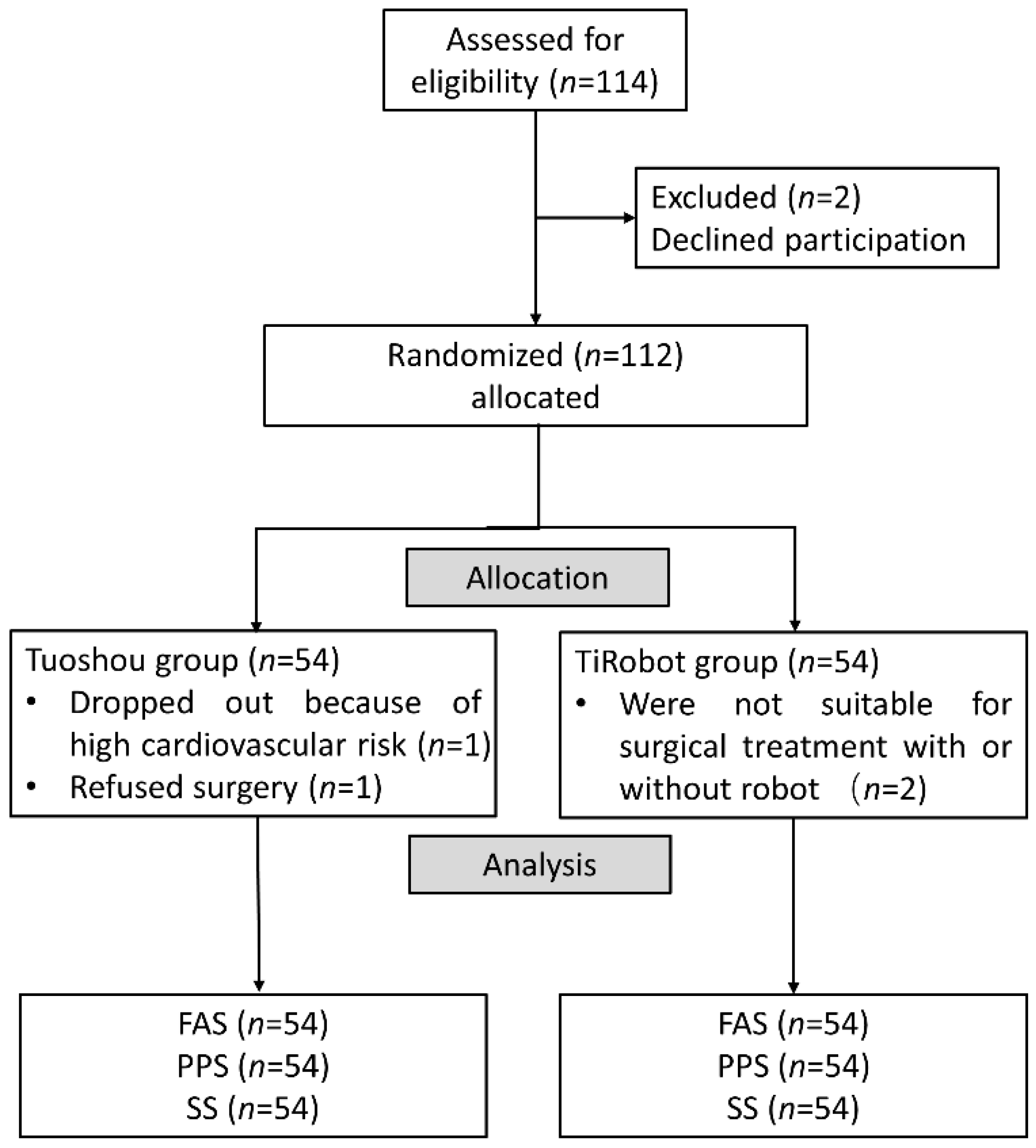
The present study also verified the accuracy of the robot. In the early stages, animal experiments confirmed the accuracy of the robot in order to meet the requirements of pedicle screw placement. A multicenter, randomized controlled trial (RCT) was then conducted to compare the Tuoshou with the TiRobot. The primary objective of this RCT was to investigate the differences between the two robots in the accuracy of Kirschner wire (K-wire) placement during pedicle screw fixation. Other accuracy and safety metrics were also compared.
4. Discussion
The orthopedic surgical robot has the advantages of safety, accuracy, less radiation, and a shorter learning curve, and more and more surgeons have begun to perform robot-assisted surgeries [
17]. In spinal surgeries, robot assistance is often adopted for pedicle screw insertion, navigation, and positioning in vertebroplasty [
18,
19,
20,
21,
22]. Therefore, the accuracy of robot navigation and positioning directly affects the quality of spinal surgeries.
Currently, the TiRobot is the most commonly used among the existing orthopedic surgical robots in China. Although it has improved a lot in orthopedic surgeries, there are still some disadvantages associated with it. First, the TiRobot consists of three main components, including a robotic arm, an optical tracking device, and a surgical planning and controlling workstation [
15]. The relatively large number of components affects the efficiency of the operation. The small operating room space could affect the surgeon’s operation. In some cases, the operator may not be able to get accurate real-time feedback through the display screen while inserting the K-wire. The Tuoshou integrates the robotic arm and the workstation, which greatly improves surgical efficiency and space utilization. The operator can obtain the positional error information of the robotic arm and the K-wire through the screen at any time, which improves the manipulability of the robot.
Second, the end of the robotic arm in the Tuoshou has been improved compared to that of the TiRobot, so that the accuracy of surgical positioning can be guaranteed. A tracker was installed on the end device of the robotic arm to assist in visual positioning. The ruler for registration and the guide cylinder for orientation were connected to the end through disassembly and assembly mechanisms. Repeated disassembly and assembly for a long period of time will lead to inconsistency of physical wear and installation position, resulting in loss of accuracy. On the contrary, the end of the Tuoshou adopts the integrated design of the tracker and guide cylinder, which avoids the risk of accuracy decline caused by disassembly and assembly.
The third advantage of the Tuoshou compared to the TiRobot is less surgical trauma. In the TiRobot group, the fixation of the reference tracker was achieved after the skin was incised and fixed on the spinous process. Sometimes the incision made by this operation was not smaller than the incision made by the screw placement, which defeats the purpose of minimally invasive surgery. Using our fixation device with the K-wire firmly fixed the tracer on the spinous process without exposure, which greatly reduced trauma.
An animal experiment on eight sheep was conducted before the Tuoshou was used for pedicle screw fixation in a human. The results showed that the Tuoshou has a current mean deviation of 0.839 mm, which is already superior to that of commercially available surgical robots. Furthermore, based on the present randomized trial, patients had good clinical and patient-reported outcomes after pedicle screw fixation, both assisted by the TiRobot and Tuoshou. When the patients’ baselines were similar, the K-wire placement deviation in the Tuoshou group was significantly smaller than that in the TiRobotic group [(1.81 ± 0.89) mm vs. (2.02 ± 1.05) mm, p = 0.021]. Pedicle screw insertion accuracy rate and entry point deviation, two measures of response accuracy, were smaller and statistically different in the Tuoshou group.
Since our study only involved Chinese robots, we made a preliminary comparison with other robots. The number rate of screws reaching class A and B of the Gertzbein--Robbins scale in the robot group is reported to be 91–99% [
23,
24,
25,
26], which is similar to the results of the Tuoshou robot. In terms of accuracy, the robot has reached the level of the world’s mainstream spinal surgery robot. Furthermore, few complications happened in the Tuoshou group, which is consistent with the high safety of robotic surgery. Additionally, similar to other spinal surgical robots, the Tuoshou robot only needs one time of three-dimensional scan during the operation, which greatly reduces radiation exposure [
27,
28].
There were some limitations in this study. First, the purpose of this investigation was to evaluate the accuracy of the robot in pedicle screw fixation, so the disease type of the enrolled patients was not specified. Second, the follow-up time was seven days after surgery, which was relatively short, and indicators, such as pain improvement and subsequent imaging changes, were not evaluated in the study. Third, although this was a multicenter trial, only surgeons who are experts in minimally invasive repair were included, which may limit its generalizability to surgeons with less experience. Additionally, the TiRobot was used in the control group for the study, which is commonly used in China. Other commonly used orthopedic robots in the world, such as the Mazor Robot [
29], were not included, which could lead to the one-sidedness of the test results.




{kind=link}
{kind=link}
{kind=link}
{kind=link}