
Evaluation of Individual Plant Growth Estimation in an Intercropping Field with UAV Imagery



Abstract
:1. Introduction
2. Materials and Methods
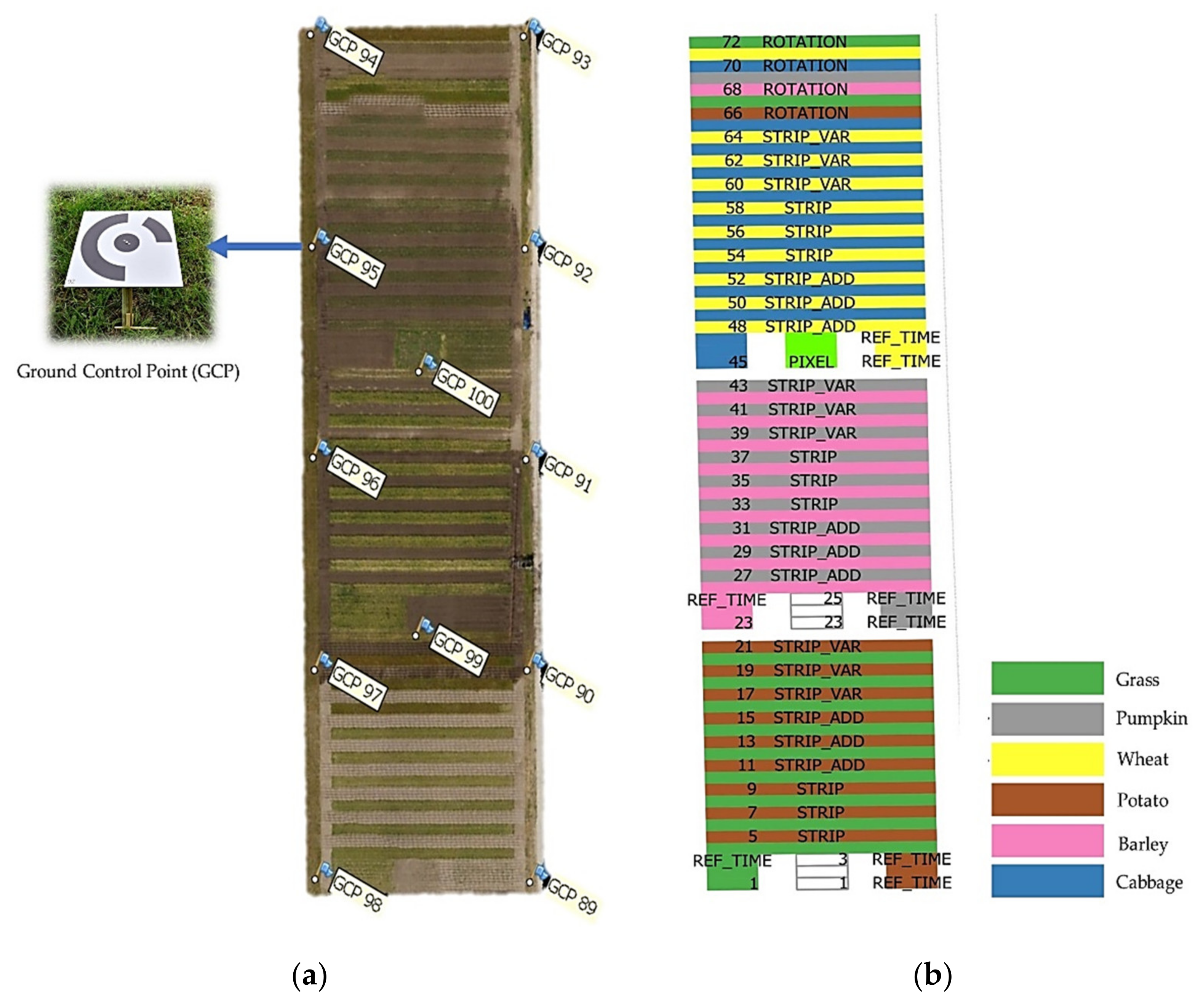
2.1. Experimental Sites
2.2. UAV-RGB Image Acquisition
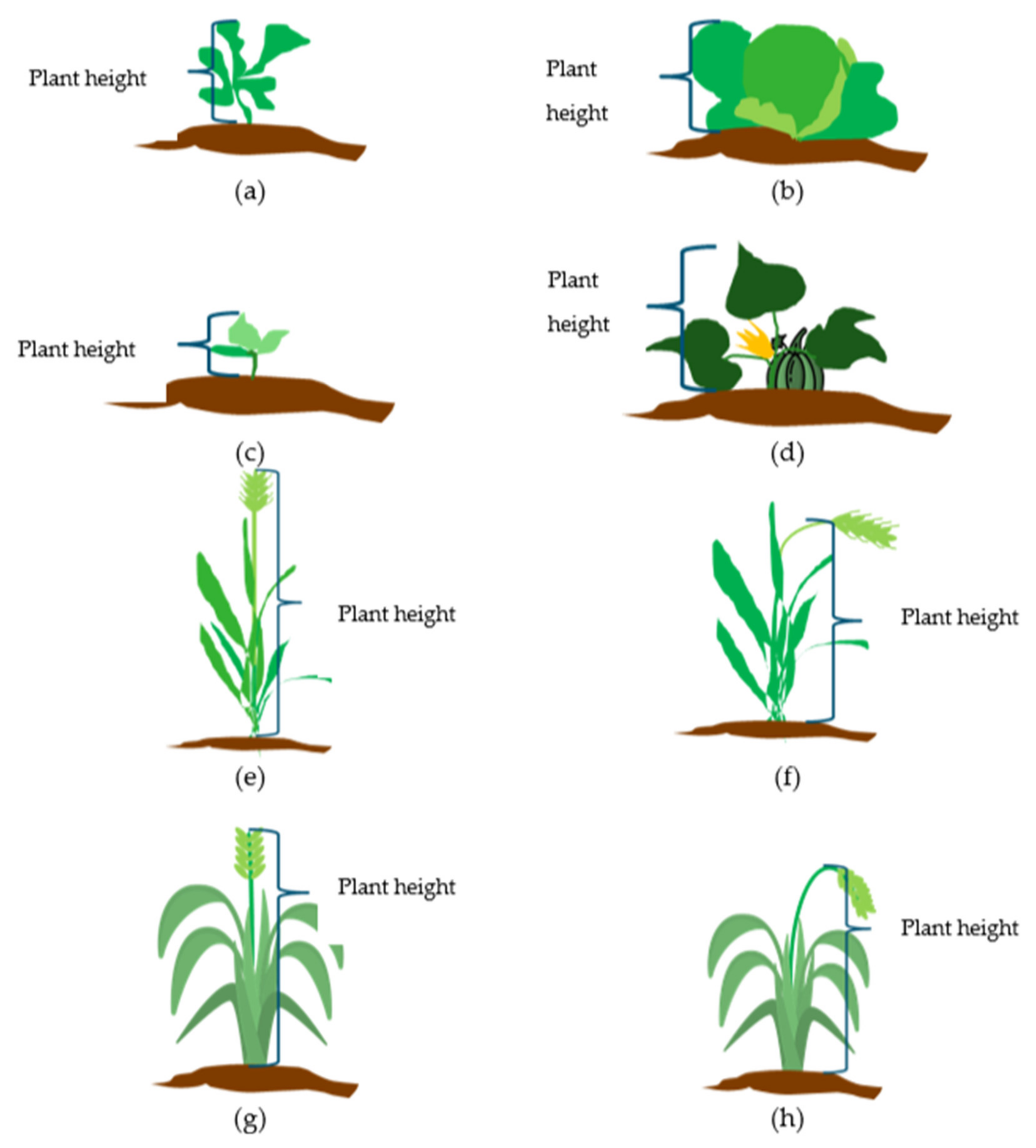
2.3. Ground truth Measurements of Individual Plant Height
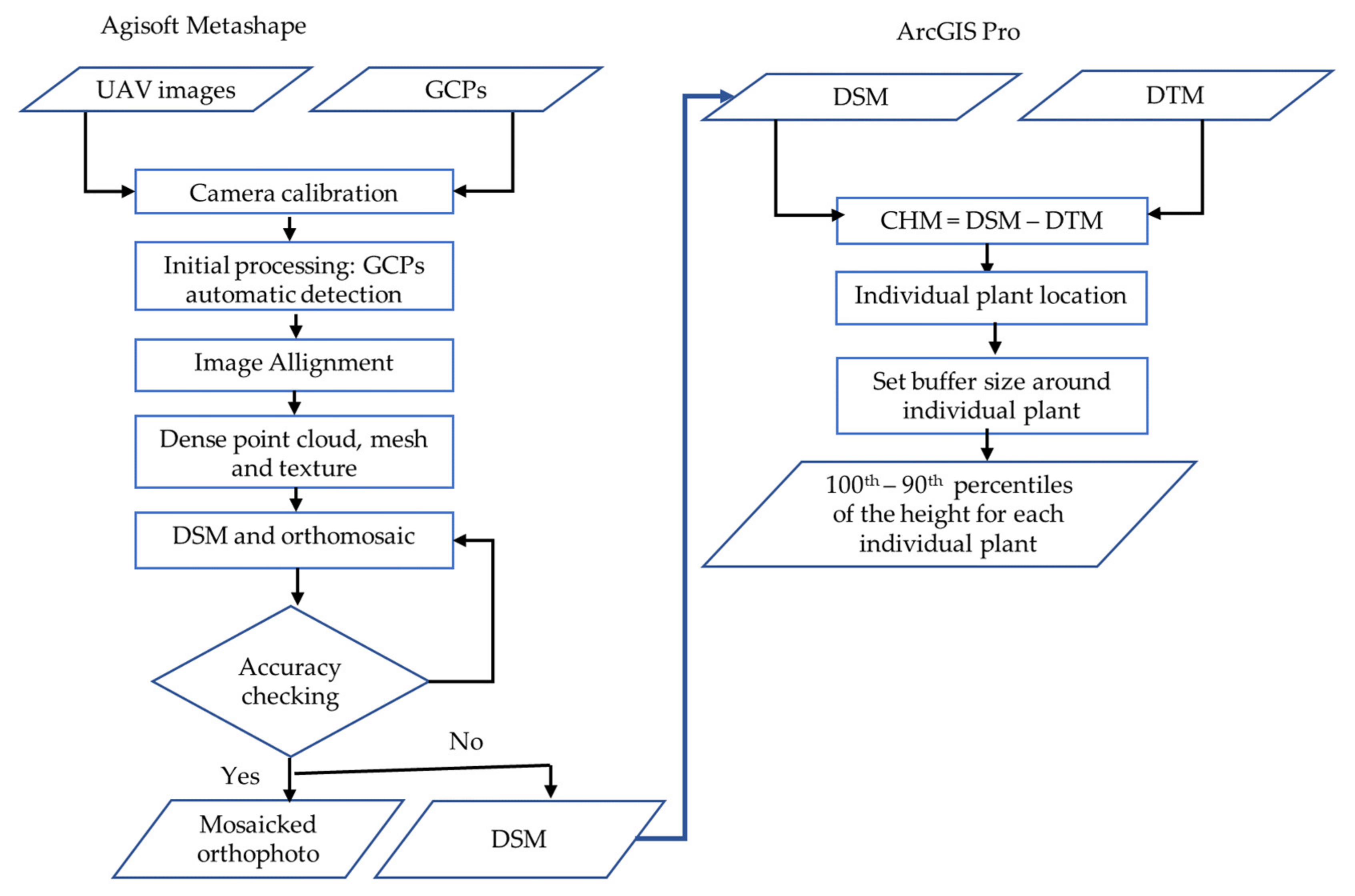
2.4. Overview of the Methodology Estimation of Plant Height from UAV Imagery
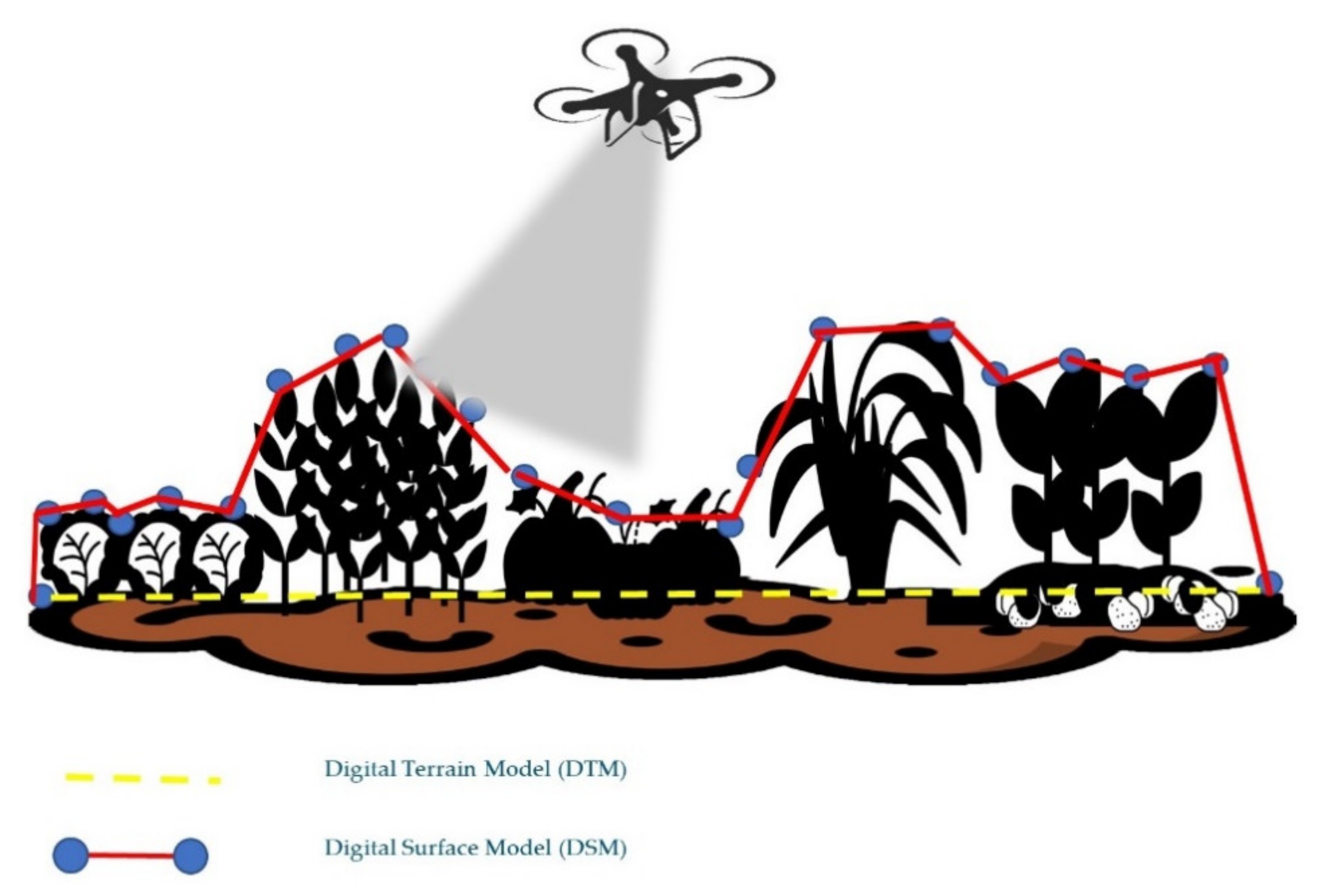
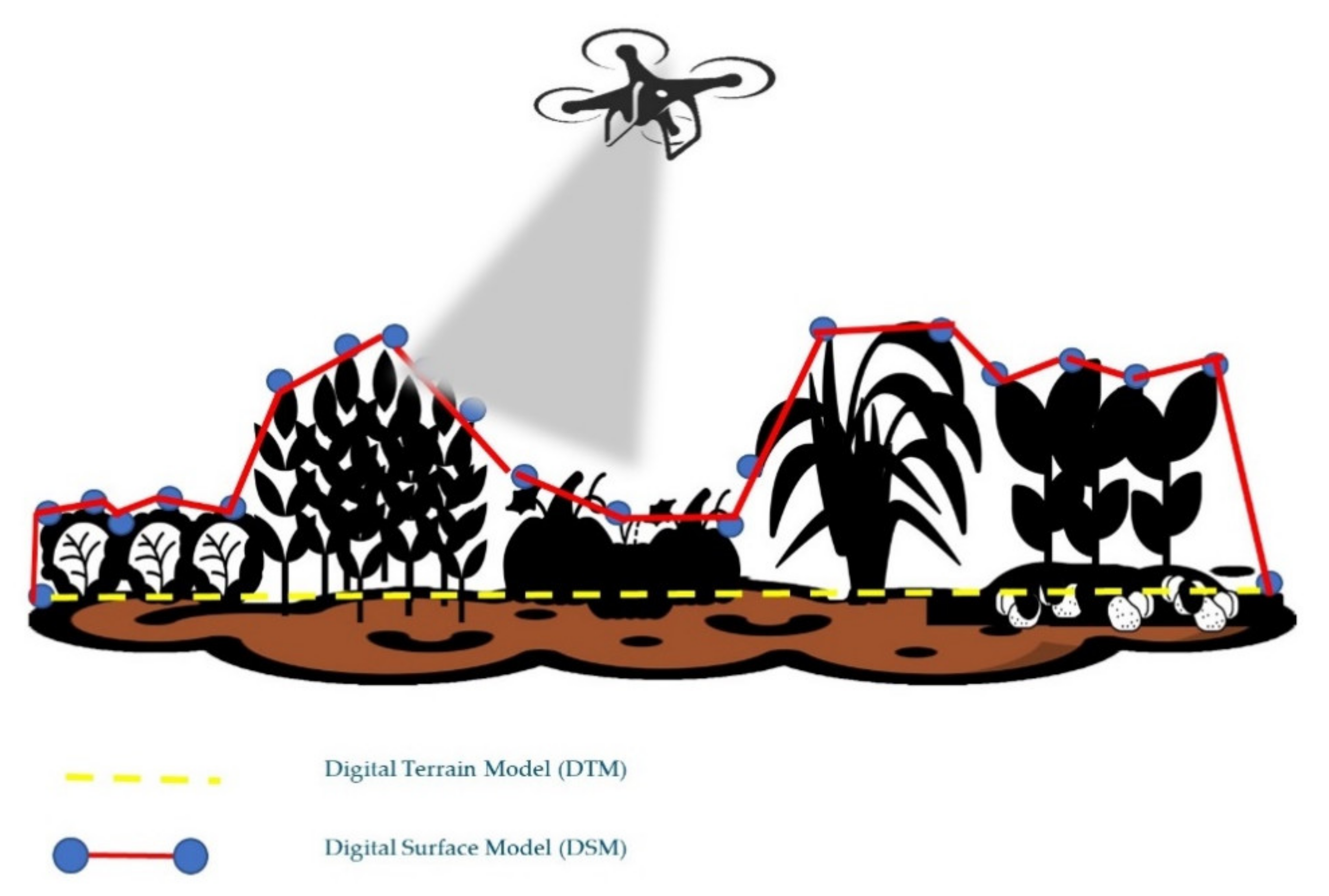
2.4.1. Generation of the Digital Surface Model
2.4.2. Crop Height Model (CHM) Generation
2.5. Statistical Analysis
3. Results
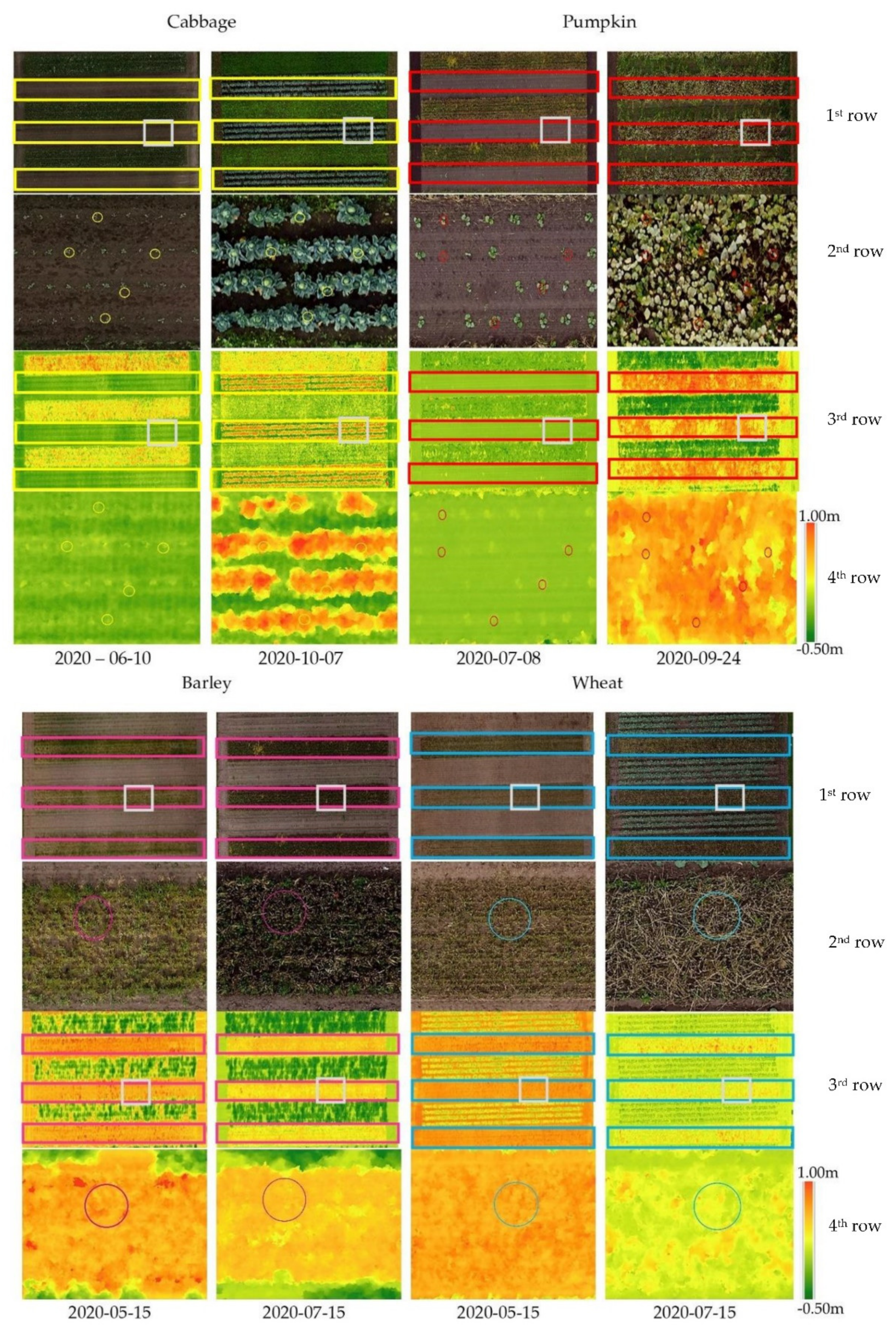
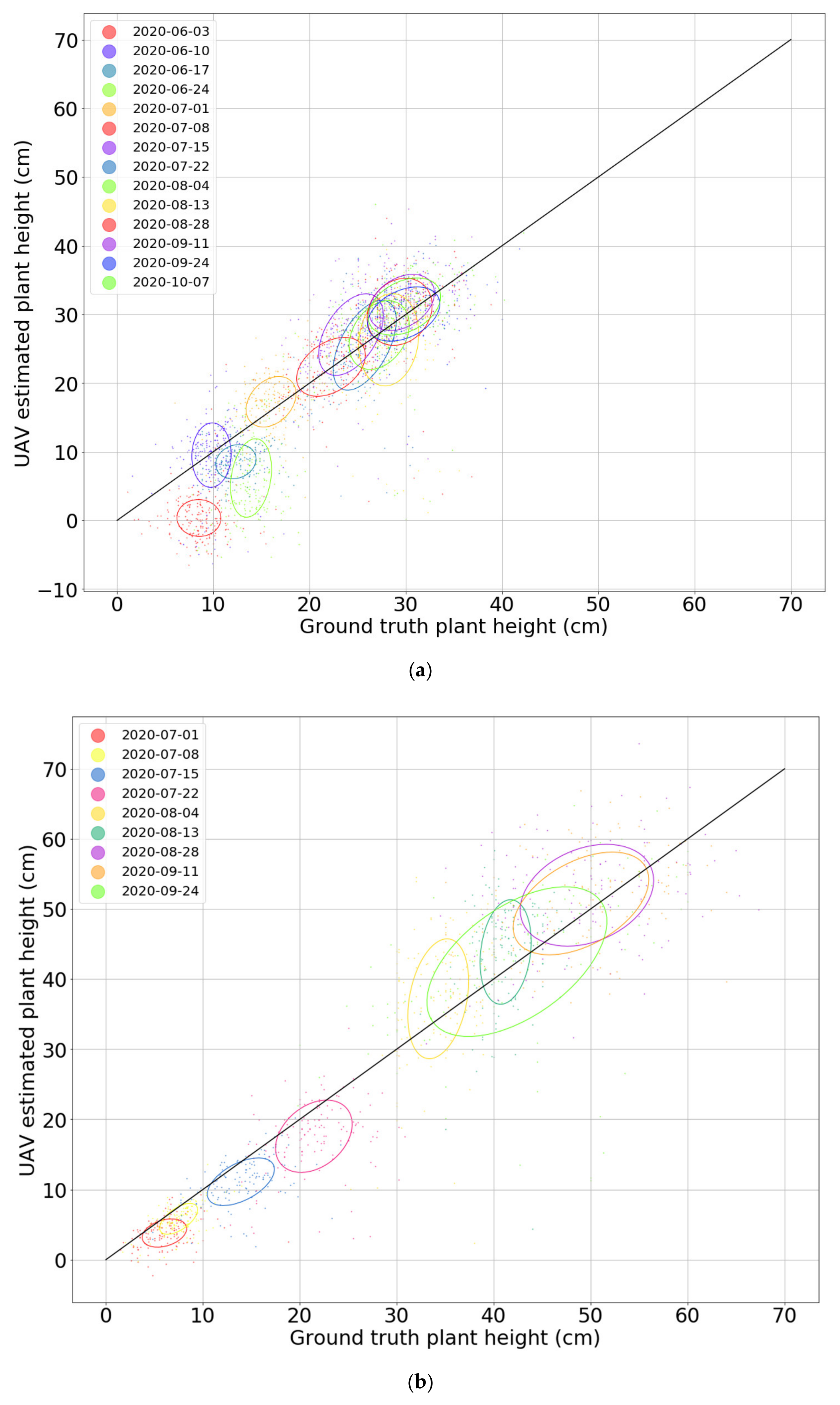
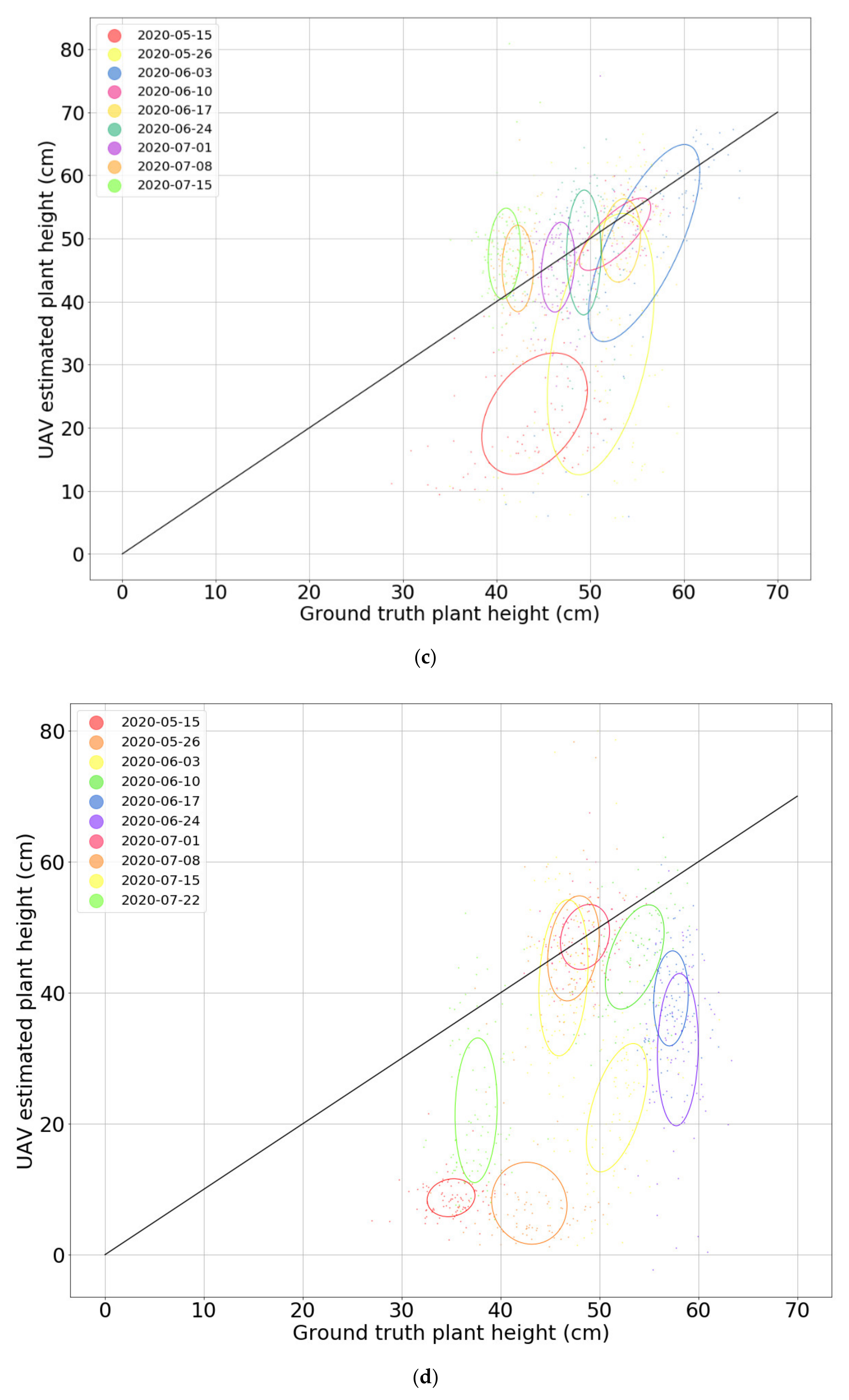
3.1. Development of Crop Height Models (CHMs) for Individual Plant Height
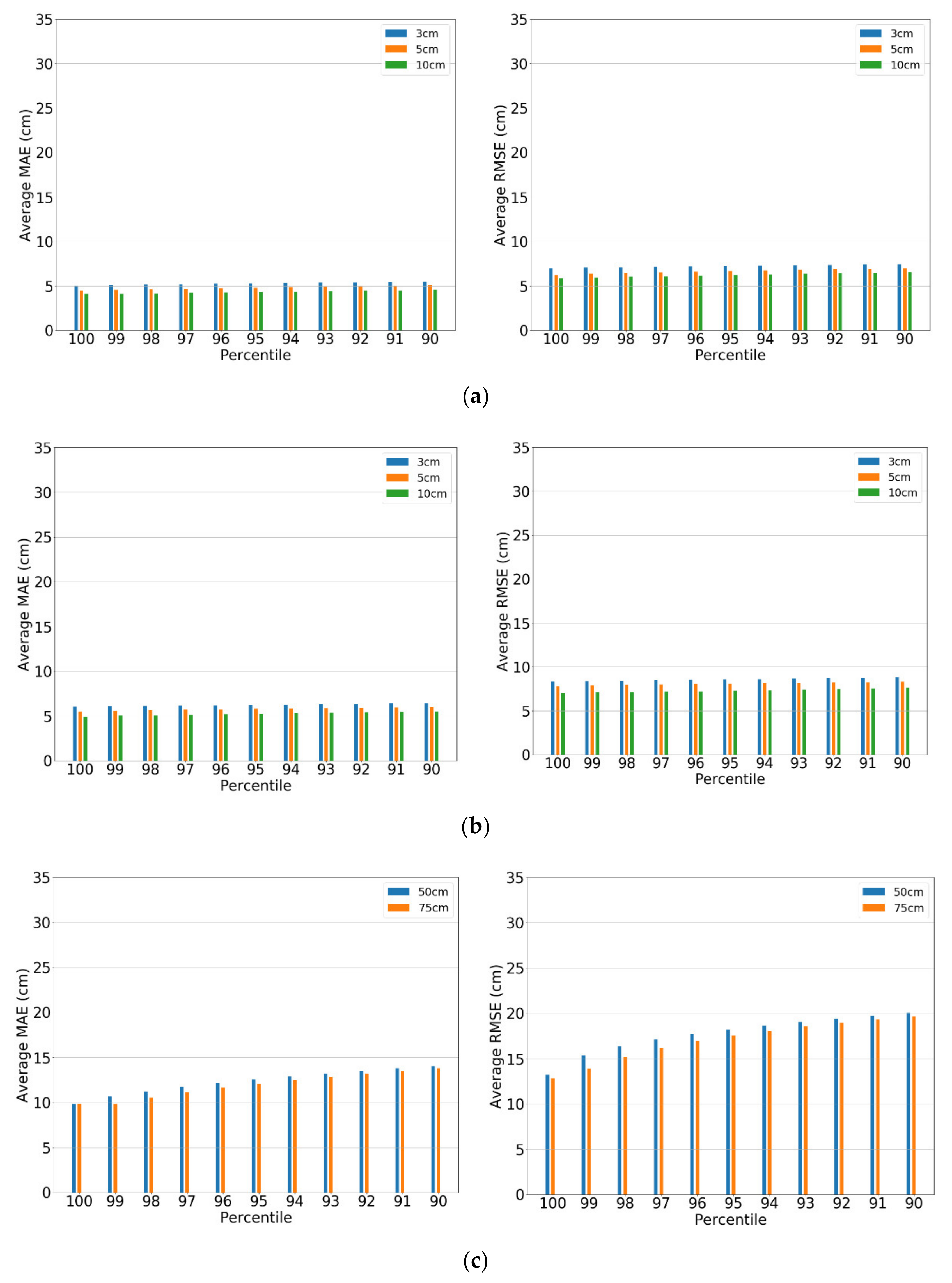
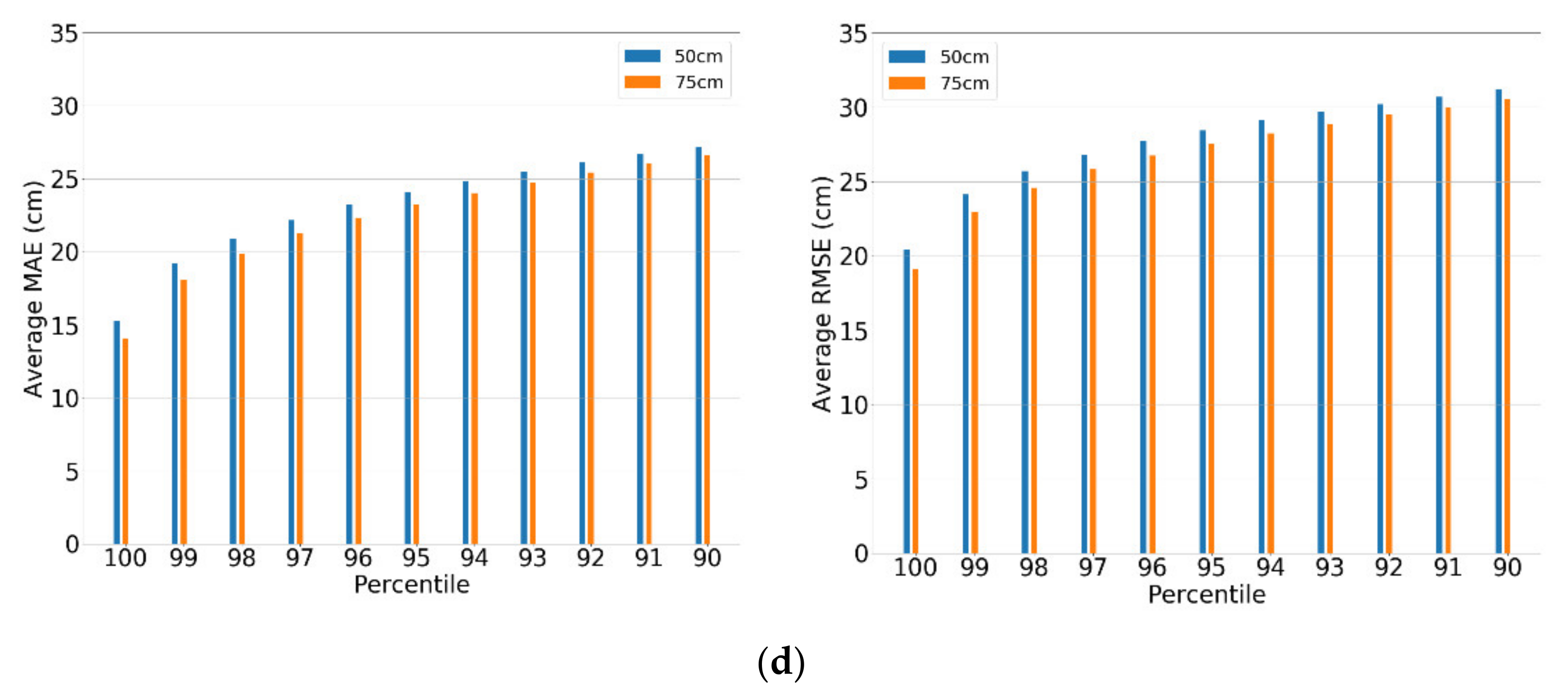
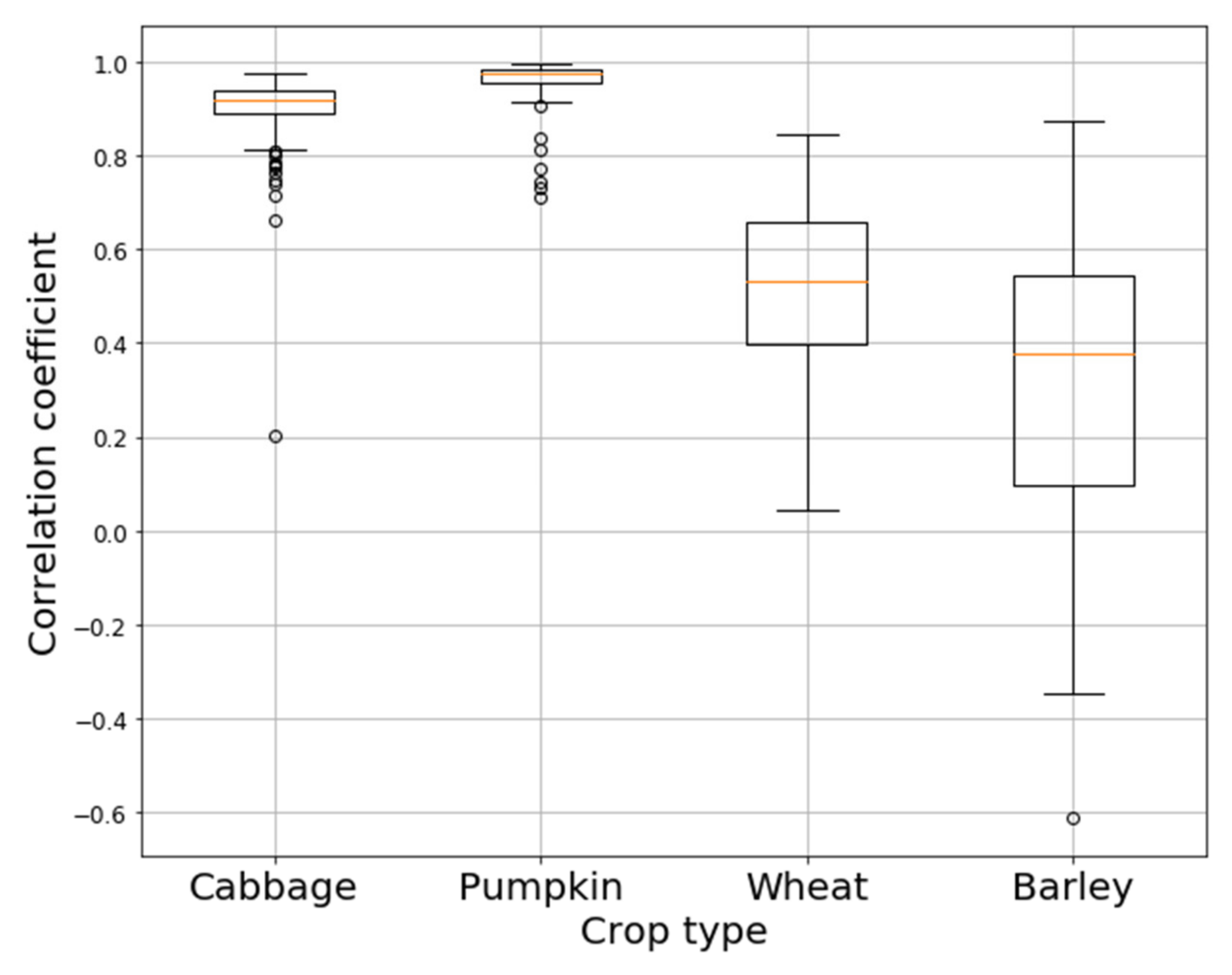
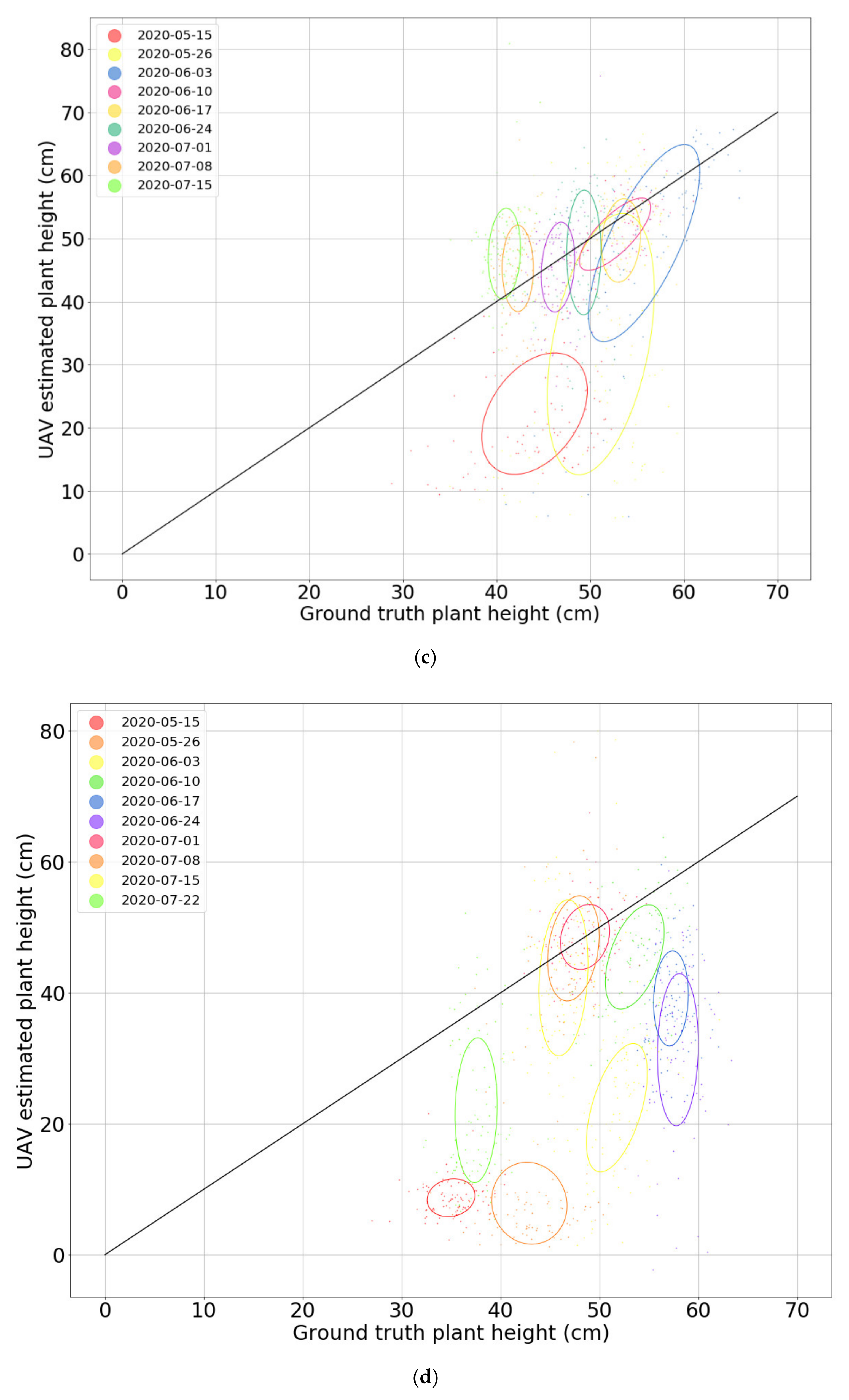
3.2. Optimal Setting for Plant Height Assessment in an Intercropping Field
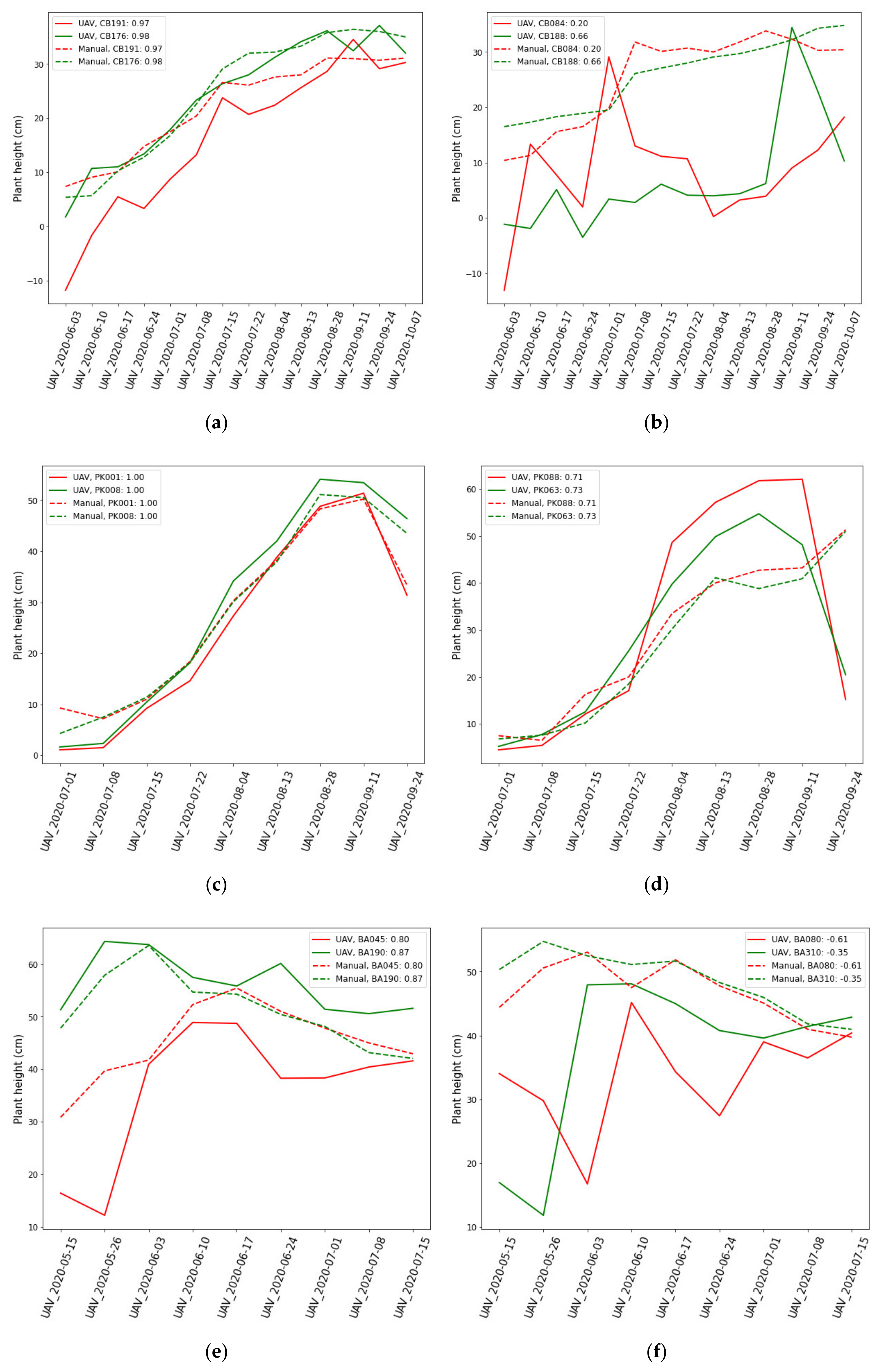
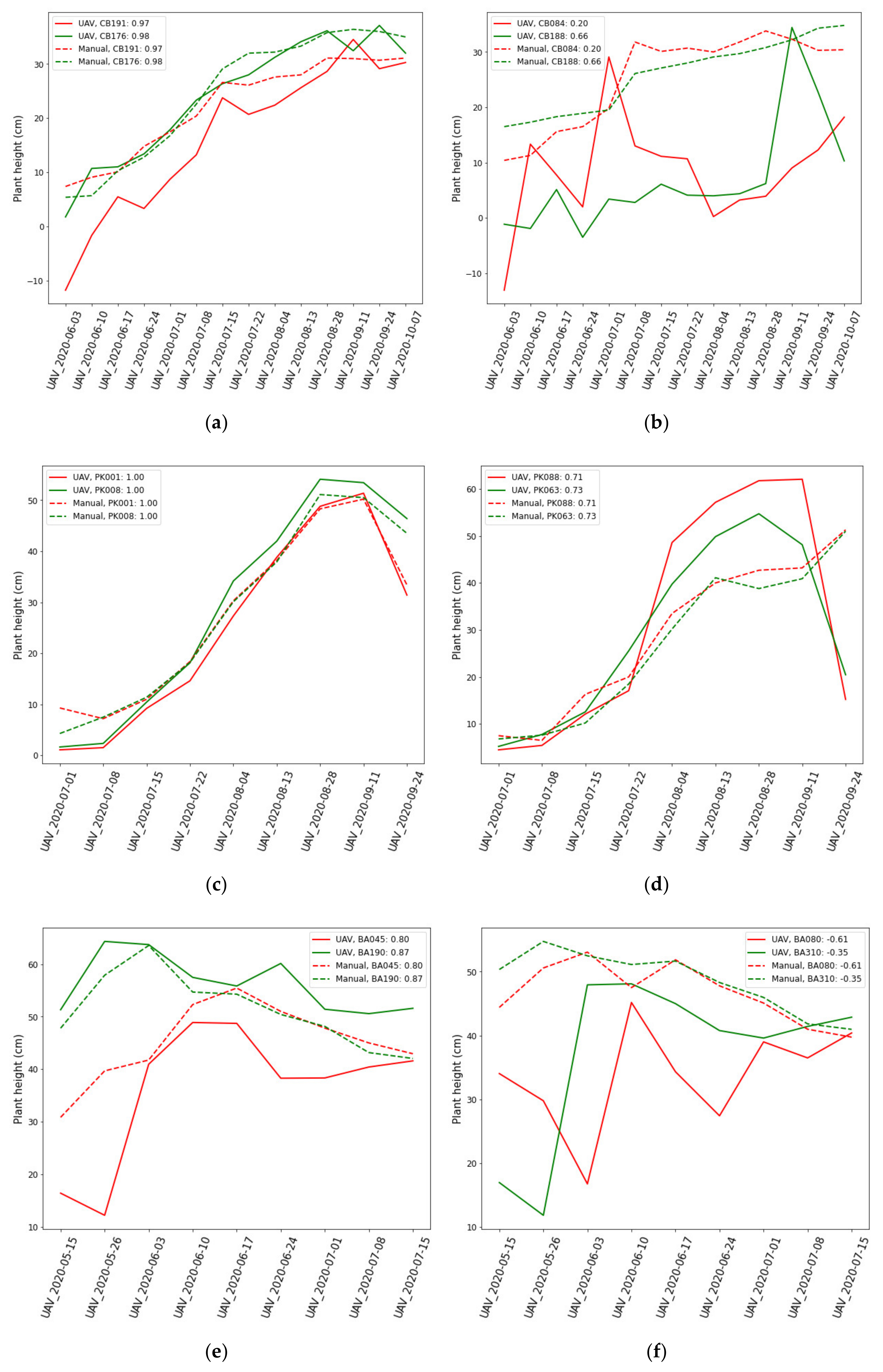
3.3. Individual Plant Growth
4. Discussion
4.1. Significant Results of Crop Height Models (CHMs) for Individual Plant Height
4.2. Limitation and Uncertainties That Affected Plant height Estimation
4.3. UAV-Based Height Estimation of Individual Plants for the Study of Intercropping Systems
4.4. Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Krus, A.; Van Apeldoorn, D.; Valero, C.; Ramirez, J.J. Acquiring Plant Features with Optical Sensing Devices in an Organic Strip-Cropping System. Agronomy 2020, 10, 197. [Google Scholar] [CrossRef] [Green Version]
- Pulido-Moncada, M.; Munkholm, L.J. Schjønning Wheel load, repeated wheeling, and traction effects on subsoil compaction in northern Europe. Soil Tillage Res. 2019, 186, 300–309. [Google Scholar] [CrossRef]
- Wetzel, W.C.; Kharouba, H.M.; Robinson, M.; Holyoak, M.; Karban, R. Variability in plant nutrients reduces insect herbivore performance. Nature 2016, 539, 425–427. [Google Scholar] [CrossRef] [PubMed]
- Litrico, I.; Violle, C. Diversity in Plant Breeding: A New Conceptual Framework. Trends Plant Sci. 2015, 20, 604–613. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brooker, R.W.; Bennett, A.E.; Cong, W.F.; Daniell, T.J.; George, T.S.; Hallett, P.D.; Hawes, C.; Iannetta, P.P.; Jones, H.G.; Karley, A.J.; et al. Improving intercropping: A synthesis of research in agronomy, plant physiology and ecology. New Phytol. 2015, 206, 107–117. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Dong, Y.; Tang, L.; Zheng, Y.; Makowski, D.; Yu, Y.; Zhang, F.; van der Werf, W. Intercropping cereals with faba bean reduces plant disease incidence regardless of fertilizer input; a meta-analysis. Eur. J. Plant Pathol. 2019, 154, 931–942. [Google Scholar] [CrossRef]
- Tajmiri, P.; Fathi, S.A.; Golizadeh, A.; Nouri-Ganbalani, G. Effect of strip-intercropping potato and annual alfalfa on populations of Leptinotarsa decemlineata Say and its predators. Int. J. Pest Manag. 2017, 63, 273–279. [Google Scholar] [CrossRef]
- Behera, U.K.; Sharma, A.R.; Pandey, H.N. Sustaining productivity of wheat–soybean cropping system through integrated nutrient management practices on the Vertisols of central India. Plant Soil 2007, 297, 185–199. [Google Scholar] [CrossRef]
- Van Oort, P.A.; Gou, F.; Stomph, T.J.; van der Werf, W. Effects of strip width on yields in relay-strip intercropping: A simulation study. Eur. J. Agron. 2020, 112, 125936. [Google Scholar] [CrossRef]
- Głowacka, A. The effects of strip cropping and weed control methods on yields of dent maize, narrow-leafed lupin and oats. Int. J. Plant Prod. 2014, 8, 505–530. [Google Scholar]
- Moeckel, T.; Dayananda, S.; Nidamanuri, R.R.; Nautiyal, S.; Hanumaiah, N.; Buerkert, A.; Wachendorf, M. Estimation of Vegetable Crop Parameter by Multi-temporal UAV-Borne Images. Remote Sens. 2018, 10, 805. [Google Scholar] [CrossRef] [Green Version]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Lazcano, C.; Domínguez, J. The use of vermicompost in sustainable agriculture: Impact on plant growth and soil fertility. Soil Nutr. 2011, 10, 211–234. [Google Scholar]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Anthony, D.; Elbaum, S.; Lorenz, A.; Detweiler, C. On crop height estimation with UAVs. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Kawamura, K.; Asai, H.; Yasuda, T.; Khanthavong, P.; Soisouvanh, P.; Phongchanmixay, S. Field phenotyping of plant height in an upland rice field in Laos using low-cost small unmanned aerial vehicles (UAVs). Plant Prod. Sci. 2020, 23, 452–465. [Google Scholar] [CrossRef]
- Madec, S.; Baret, F.; De Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-Throughput Phenotyping of Plant Height: Comparing Unmanned Aerial Vehicles and Ground LiDAR Estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef] [Green Version]
- Hu, P.; Chapman, S.C.; Wang, X.; Potgieter, A.; Duan, T.; Jordan, D.; Guo, Y.; Zheng, B. Estimation of plant height using a high throughput phenotyping platform based on unmanned aerial vehicle and self-calibration: Example for sorghum breeding. Eur. J. Agron. 2018, 95, 24–32. [Google Scholar] [CrossRef]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-Throughput Phenotyping of Sorghum Plant Height Using an Unmanned Aerial Vehicle and Its Application to Genomic Prediction Modeling. Front. Plant Sci. 2017, 8, 421. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R.; et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Hassan, M.A.; Yang, M.; Fu, L.; Rasheed, A.; Zheng, B.; Xia, X.; Xiao, Y.; He, Z. Accuracy assessment of plant height using an unmanned aerial vehicle for quantitative genomic analysis in bread wheat. Plant Methods 2019, 15, 37. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of Citrus Trees from Unmanned Aerial Vehicle Imagery Using Convolutional Neural Networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef] [Green Version]
- Ampatzidis, Y.; Partel, V. UAV-Based High Throughput Phenotyping in Citrus Utilizing Multispectral Imaging and Artificial Intelligence. Remote Sens. 2019, 11, 410. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.W.; Yun, H.S.; Jeong, S.J.; Kwon, Y.S.; Kim, S.G.; Lee, W.S.; Kim, H.J. Modeling and Testing of Growth Status for Chinese Cabbage and White Radish with UAV-Based RGB Imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef] [Green Version]
- Guo, W.; Fukano, Y.; Noshita, K.; Ninomiya, S. Field-based individual plant phenotyping of herbaceous species by unmanned aerial vehicle. Ecol. Evol. 2020, 10, 12318–12326. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Varela, R.A.; De la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, A.; Haga, C.; Matsui, T.; Machimura, T.; Hayashi, K.; Sugita, S.; Takagi, H. An End to End Process Development for UAV-SfM Based Forest Monitoring: Individual Tree Detection, Species Classification and Carbon Dynamics Simulation. Forests 2019, 10, 680. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.; Fujii, Y.; Takata, D.; Zheng, B.; Noshita, K.; Honda, K.; Ninomiya, S.; Guo, W. Characterization of peach tree crown by using high-resolution images from an unmanned aerial vehicle. Hortic. Res. 2018, 5, 74. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ditzler, L.; van Apeldoorn, D.F.; Schulte, R.P.; Tittonell, P.; Rossing, W.A. Redefining the field to mobilize three-dimensional diversity and ecosystem services on the arable farm. Eur. J. Agron. 2021, 122, 126197. [Google Scholar] [CrossRef]
- Pacilly, F.C.; van Bueren, E.T.; Groot, J.C.; Hofstede, G.J. Moving perceptions on potato late blight control: Workshops with model-based scenarios. Crop Prot. 2019, 119, 76–87. [Google Scholar] [CrossRef]
- Granshaw, S.I. Photogrammetric Terminology: Third Edition. Photogramm. Rec. 2016, 31, 210–252. [Google Scholar] [CrossRef]
- Wittstruck, L.; Kühling, I.; Trautz, D.; Kohlbrecher, M.; Jarmer, T. UAV-Based RGB Imagery for Hokkaido Pumpkin (Cucurbita max.) Detection and Yield Estimation. Sensors 2021, 21, 118. [Google Scholar] [CrossRef] [PubMed]
- Han, L.; Yang, G.; Yang, H.; Xu, B.; Li, Z.; Yang, X. Clustering Field-Based Maize Phenotyping of Plant-Height Growth and Canopy Spectral Dynamics Using a UAV Remote-Sensing Approach. Front. Plant Sci. 2018, 9, 1638. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, W.; Li, J.; Bhatta, M.; Shi, Y.; Baenziger, P.S.; Ge, Y. Wheat Height Estimation Using LiDAR in Comparison to Ultrasonic Sensor and UAS. Sensors 2018, 18, 3731. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Xie, T.; Li, J.; Yang, C.; Jiang, Z.; Chen, Y.; Guo, L.; Zhang, J. Crop height estimation based on UAV images: Methods, errors, and strategies. Comput. Electron. Agric. 2021, 185, 106155. [Google Scholar] [CrossRef]
- Birdal, A.C.; Avdan, U.; Türk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017, 8, 1144–1156. [Google Scholar] [CrossRef] [Green Version]
- Youngerman, C.Z.; DiTommaso, A.; Curran, W.S.; Mirsky, S.B.; Ryan, M.R. Corn Density Effect on Interseeded Cover Crops, Weeds, and Grain Yield. Agron. J. 2018, 110, 2478–2487. [Google Scholar] [CrossRef] [Green Version]
- Wilke, N.; Siegmann, B.; Klingbeil, L.; Burkart, A.; Kraska, T.; Muller, O.; van Doorn, A.; Heinemann, S.; Rascher, U. Quantifying Lodging Percentage and Lodging Severity Using a UAV-Based Canopy Height Model Combined with an Objective Threshold Approach. Remote Sens. 2019, 11, 515. [Google Scholar] [CrossRef] [Green Version]
- Demir, N.; Sönmez, N.K.; Akar, T.; Ünal, S. Automated Measurement of Plant Height of Wheat Genotypes Using a DSM Derived from UAV Imagery. Proceedings 2018, 2, 350. [Google Scholar] [CrossRef] [Green Version]
- Schirrmann, M.; Giebel, A.; Gleiniger, F.; Pflanz, M.; Lentschke, J.; Dammer, K.H. Monitoring Agronomic Parameters of Winter Wheat Crops with Low-Cost UAV Imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef] [Green Version]
- Walter, J.D.; Edwards, J.; McDonald, G.; Kuchel, H. Estimating Biomass and Canopy Height With LiDAR for Field Crop Breeding. Front. Plant Sci. 2019, 10, 1145. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Tang, H.; Huang, Y.; Shi, Y.; Li, J.; Zheng, Y. Dynamic analysis of QTL for plant height at different developmental stages in maize (Zea mays L.). Chin. Sci. Bull. 2003, 48, 2601–2607. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, R.; Song, W.; Han, L.; Liu, X.; Sun, X.; Luo, M.; Chen, K.; Zhang, Y.; Yang, H.; et al. Dynamic plant height QTL revealed in maize through remote sensing phenotyping using a high-throughput unmanned aerial vehicle (UAV). Sci. Rep. 2019, 9, 3458. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ten Harkel, J.; Bartholomeus, H.; Kooistra, L. Biomass and Crop Height Estimation of Different Crops Using UAV-Based Lidar. Remote Sens. 2020, 12, 17. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crops (Number of Plants) | UAV Flight and Ground Measurement Dates | Flight Time | Illumination (lux) | Sky Condition | Wind (ms−1) |
|---|---|---|---|---|---|
| Wheat (500); Barley (500) | 15 May 2020 | 13:21 | 328.3 | Sunny | 4.6 |
| Wheat (500); Barley (500) | 26 May 2020 | 14:00 | 708.3 | Sunny | 2.9 |
| Wheat (500); Barley (500); Cabbage (200) | 3 June 2020 | 13:32 | 643.3 | Sunny | 6.6 |
| Wheat (500); Barley (500); Cabbage (200) | 10 June 2020 | 12:37 | 165 | Cloudy | 3.6 |
| Wheat (500); Barley (500); Cabbage (193) | 17 June 2020 | 13:35 | 598.3 | Variable | 4.6 |
| Wheat (500); Barley (500); Cabbage (190) | 24 June 2020 | 13:14 | 746.7 | Variable | 7.1 |
| Wheat (500); Barley (500); Cabbage (189); Pumpkin (135) | 1 July 2020 | 16:07 | 348.3 | Cloudy | 10.1 |
| Wheat (500); Barley (500); Cabbage (187); (Pumpkin (137) | 8 July 2020 | 16:57 | 198.3 | Sunny | 2.6 |
| Wheat (500); Cabbage (187); (Pumpkin (136) | 15 July 2020 | 13:25 | 465 | Variable | 3.7 |
| Wheat (500); Cabbage (187); (Pumpkin (136) | 22 July 2020 | 13:48 | 680 | Cloudy | 2.3 |
| Cabbage (187); (Pumpkin (136) | 4 August 2020 | 14:45 | 255 | Variable | 1.4 |
| Cabbage (186); (Pumpkin (136) | 13 August 2020 | 13:38 | 516.7 | Variable | 2.5 |
| Cabbage (186); (Pumpkin (136) | 28 August 2020 | 11:59 | 265 | Sunny | 4.5 |
| Cabbage (185); Pumpkin (136) | 11 September 2020 | 12:55 | 485 | Sunny | 3.4 |
| Cabbage (185); Pumpkin (128) | 24 September 2020 | 11:28 | 403.3 | Sunny | 1.7 |
| Cabbage (185) | 7 October 2020 | 13:32 | 230 | Sunny | 9 |
| Process | Parameter | Setting |
|---|---|---|
| Reference setting | Coordinate system | Amersfoort/RD New (EPSG:28992) |
| Camera reference | WGS 84 (EPSG:4326) | |
| Marker reference | Amersfoort/RD New (EPSG:28992) | |
| Camera accuracy (m) | 0.05 | |
| Camera accuracy (deg) | 10 | |
| Marker accuracy | 0.005 | |
| Scale bar accuracy | 0.001 | |
| Capture distance (m) | 20 | |
| Detect GCPs | Number of GCPs | 12 |
| Marker type | Circular 12 bit | |
| Tolerance | 70 | |
| Camera calibration | Enable rolling shutter compensation | Yes |
| Align photos | Accuracy | Highest |
| Generic preselection | No | |
| Reference preselection | No | |
| Key point limit | 40,000 | |
| Adaptive camera model fitting | Yes | |
| Build point clouds | Quality | Ultra High |
| Depth filtering | Mild | |
| Build mesh | Source data | Dense cloud |
| Surface type | Height field (2.5D) | |
| Face count | Medium | |
| Interpolation | Enabled | |
| Calculate vertex colors | Yes | |
| Build texture | Mapping mode | Adaptive orthophoto |
| Blending mode | Mosaic | |
| Enable hole filling | Yes | |
| Enable ghosting filter | Yes | |
| Build DSM | Projection type | Geographic; Amersfoort/RD New (EPSG:28992) |
| Source data | Dense cloud | |
| Interpolation | Enabled | |
| Orthomosaic | Projection type | Geographic; Amersfoort/RD New (EPSG:28992) |
| Surface | DSM | |
| Blending mode | Mosaic |
| Parameter | Cabbage | Pumpkin | Barley | Wheat |
|---|---|---|---|---|
| Percentile | 100th | 100th | 99th | 99th |
| Buffer size | 10 cm | 10 cm | 75 cm | 75 cm |
| Date | Correlation, R2 | Mean Absolute Error (cm) | Root Mean Square Error (cm) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cabbage (10 cm) | Pumpkin (10 cm) | Barley (75 cm) | Wheat (75 cm) | Cabbage (10 cm) | Pumpkin (10 cm) | Barley (75 cm) | Wheat (75 cm) | Cabbage (10 cm) | Pumpkin (10 cm) | Barley (75 cm) | Wheat (75 cm) | |
| 15 May 2020 | - | - | 0.3817 | 0.1229 | - | - | 22.0601 | 26.2932 | - | - | 23.6216 | 26.5278 |
| 26 May 2020 | - | - | 0.4080 | −0.0647 | - | - | 22.0794 | 35.0511 | - | - | 26.0833 | 35.8434 |
| 3 June 2020 | 0.0522 | - | 0.7242 | 0.5388 | 14.0368 | - | 8.2577 | 29.3145 | 14.6421 | - | 13.6089 | 30.5235 |
| 10 June 2020 | 0.0405 | - | 0.7471 | 0.4782 | 3.4587 | - | 3.3903 | 8.9060 | 5.0433 | - | 4.2933 | 10.7075 |
| 17 June 2020 | 0.1513 | - | 0.1521 | 0.0947 | 4.1423 | - | 5.6804 | 18.1641 | 4.8292 | - | 7.5138 | 19.4909 |
| 24 June 2020 | 0.2246 | - | 0.0295 | 0.0776 | 8.3127 | - | 8.0717 | 26.6474 | 9.5656 | - | 10.0884 | 29.0250 |
| 1 July 2020 | 0.3107 | 0.3145 | 0.1917 | 0.1844 | 3.0811 | 2.4888 | 5.2924 | 3.9100 | 3.9869 | 3.3732 | 7.0411 | 5.0911 |
| 8 July 2020 | 0.3954 | 0.5963 | −0.0060 | 0.2404 | 3.1774 | 1.9909 | 6.5550 | 5.8881 | 4.3547 | 2.5253 | 7.6256 | 7.7938 |
| 15 July 2020 | 0.4698 | 0.5227 | 0.1151 | 0.1865 | 4.7596 | 3.2173 | 7.8664 | 10.2552 | 5.9438 | 4.3638 | 9.8515 | 12.3438 |
| 22 July 2020 | 0.5426 | 0.3336 | - | 0.0754 | 3.9839 | 4.7967 | - | 16.7831 | 4.4981 | 6.5801 | - | 19.0083 |
| 4 August 2020 | 0.3008 | 0.2925 | - | - | 2.9135 | 6.6935 | - | - | 5.0297 | 8.6732 | - | - |
| 13 August 2020 | 0.1219 | 0.1695 | - | - | 4.7442 | 6.1096 | - | - | 7.2952 | 7.8323 | - | - |
| 28 August 2020 | 0.1850 | 0.2915 | - | - | 3.4350 | 6.8698 | - | - | 5.4805 | 8.7165 | - | - |
| 11 September 2020 | 0.3365 | 0.4641 | - | - | 3.5655 | 5.9139 | - | - | 4.8436 | 7.6058 | - | - |
| 24 September 2020 | 0.3714 | 0.5382 | - | - | 3.1677 | 6.2345 | - | - | 4.3128 | 9.6348 | - | - |
| 7 October 2020 | 0.3527 | - | - | - | 3.4409 | - | - | - | 4.6963 | - | - | - |
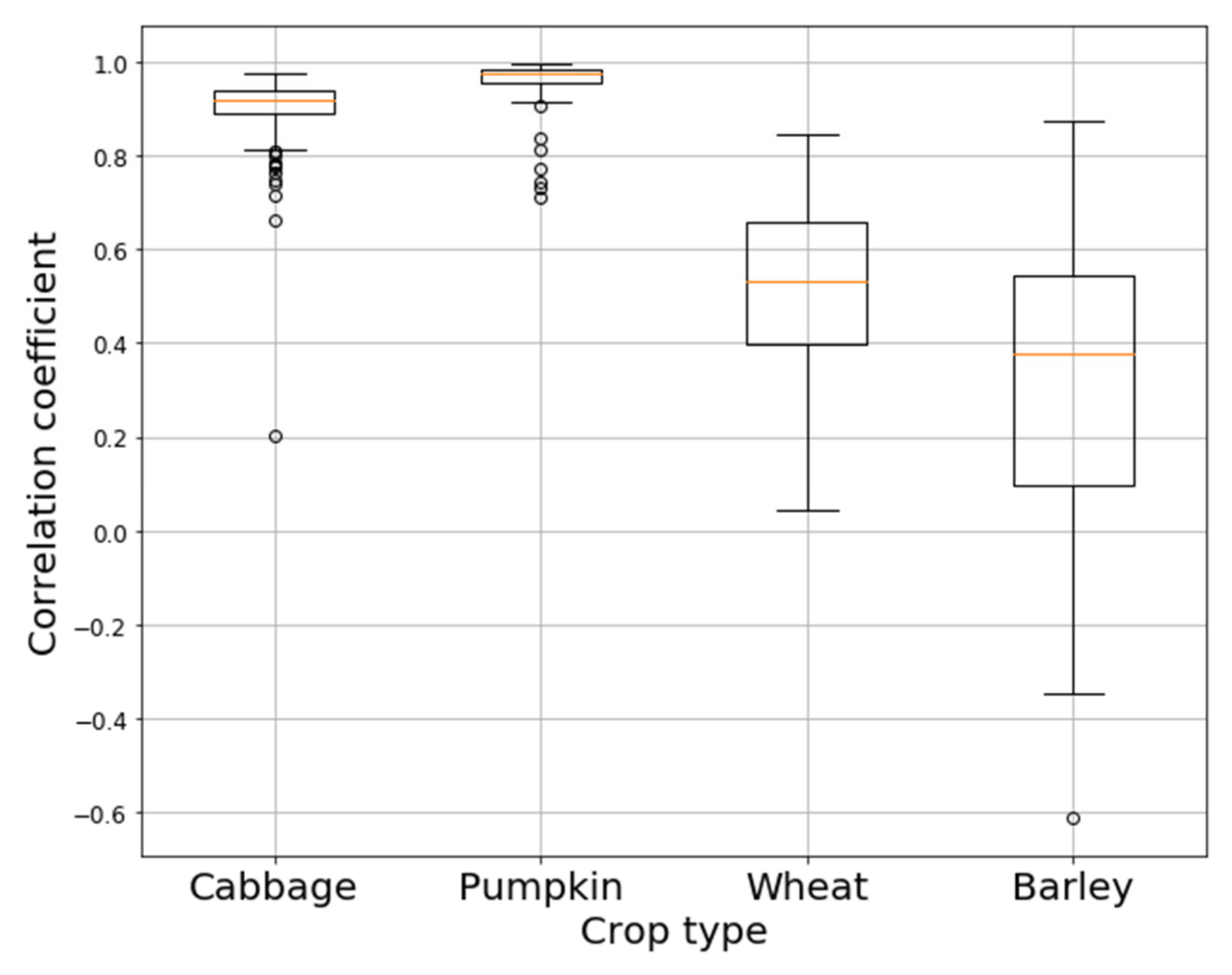
| R2 values for all dates (all CHMs) | 0.8601 | 0.9366 | 0.3563 | 0.4949 | 4.7772 | 4.9149 | 9.9170 | 18.1209 | 6.7547 | 6.9977 | 14.1616 | 22.0398 |
| R2 values for all dates (without two earliest CHMs) | - | - | 0.3635 | 0.1973 | - | - | 6.4445 | 14.9832 | - | - | 8.9972 | 18.9375 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamil, N.; Kootstra, G.; Kooistra, L. Evaluation of Individual Plant Growth Estimation in an Intercropping Field with UAV Imagery. Agriculture 2022, 12, 102. https://doi.org/10.3390/agriculture12010102
Jamil N, Kootstra G, Kooistra L. Evaluation of Individual Plant Growth Estimation in an Intercropping Field with UAV Imagery. Agriculture. 2022; 12(1):102. https://doi.org/10.3390/agriculture12010102
Chicago/Turabian StyleJamil, Norazlida, Gert Kootstra, and Lammert Kooistra. 2022. "Evaluation of Individual Plant Growth Estimation in an Intercropping Field with UAV Imagery" Agriculture 12, no. 1: 102. https://doi.org/10.3390/agriculture12010102
APA StyleJamil, N., Kootstra, G., & Kooistra, L. (2022). Evaluation of Individual Plant Growth Estimation in an Intercropping Field with UAV Imagery. Agriculture, 12(1), 102. https://doi.org/10.3390/agriculture12010102