Abstract
Rising labor costs and the inefficient manual methods of cultivating red onions in Bangladesh contribute to the country’s failure to meet is own demand. Mechanizing the process of transplanting red onion seedlings will reduce the manual labor required while increasing crop yields. This paper provides an initial study of a proposed mechanized onion transplanter designed to attach to the back side of a two-wheel tractor with power tiller operated-seeder, commonly used in Bangladesh. Testing of a prototype made from these designs proves that the design is functional but requires further development for commercial/widespread use.
1. Introduction
1.1. Onion Farming in Bangladesh
In recent years, the agricultural sector in Bangladesh has been suffering as many workers are leaving the country’s rural areas (i.e., farmlands) in search of more lucrative work in cities. This exodus is leaving many farmers, especially small stakeholder farmers, facing great difficulty in their effort to produce enough food and make a profit [1].
Although shrinking, the agriculture sector remains a powerful driver in the Bangladeshi economy and is vitally important [2]. Unlike more developed countries, smallholder farms are the foundational drivers in Bangladesh’s agricultural sector. The average farm size in Bangladesh is estimated to be 0.5 hectares (roughly 1.24 acres), making it one of the smallest average farm sizes in the world. As such, increasing the productivity of smallholder farms is one of the best ways the country can ensure it has an adequate food supply and strong economy [3].
The seeds for red onions, which are the most popular onion crop in Bangladesh, are typically sown in seed beds around November when the Bangladeshi highlands are dry [4]. The conditions for the red onion seeds must neither be too wet nor too dry, leaving only a small window of opportunity for their germination. After 25–45 days, the 8–10 cm seedlings are typically unearthed and transported to markets where they can be purchased by farmers. Then, the seedlings are planted in the lower farmlands where they will remain until they mature and are harvested [5].
The smallholder farmers who buy the onion seedlings generally hire local laborers to transplant the onion seedlings by hand one-by-one. This tedious labor is not only time consuming, but also erodes the profits of the farm owners. Hired labor accounts for 36% of the total cost for onion crops. Although onions produce higher profit margins than most crops in Bangladesh, they also require higher investment than most [6]. By reducing the labor costs associated with onion crops, farmers can increase their profit margins.
Existing transplanters that are capable of transplanting onion seedlings generally have significant drawbacks making them unusable by smallholder farmers in Bangladesh. Several types of machines exist that are capable of transplanting onion seedlings exist, but each of have significant drawbacks rendering them unusable or impractical for the smallholder farmers in Bangladesh.
1.2. Existing Transplanters
Self-propelled machines are generally powered by a 5–6 HP engine and require one or two users for operation. These machines are capable of planting 1–4 rows of seedlings simultaneously, making them size-appropriate for the smallholder farms of Bangladesh.
Fully automatic machines only require a single user during operation. However, they require that seedlings be grown trays that consist of individual pots for each seedling. Although these agricultural trays are common for many types of crops worldwide, they are not used by onion farmers in Bangladesh. Semi-automatic machines require a laborer to separate the seedlings and individually place them in the transplanter while it is moving. Oftentimes, this requires one laborer to operate the machine while another separates and places the seedlings in the transplanter.
Both semi- and fully automatic machines that are self-propelled typically cost 7000 USD or more which makes them impractical for smallholder farms.
Four-Wheel Tractor Attachment Transplanters
Like self-propelled machines, there are also semi- and fully automatic transplanters that exist as attachments for 4WTs. These machines are much larger than self-propelled transplanters and are capable of planting more than 10 rows simultaneously.
Fully automatic transplanters generally require two laborers; one to drive the tractor and another to load trays of seedlings into the transplanter. These machines are large and complex and usually cost a minimum of 40,000 USD.
Semi-automatic attachments typically require 8 or more laborers to separate the seedlings, and another to drive the tractor. Laborers sit atop the transplanter, separate onion seedlings, and drop them into chutes. The seedlings are guided by the chute to the ground where they are planted by using either a plow or a punch-type mechanism. Semi-automatic transplanting attachments typically cost around 4800 USD and above.
1.3. Two-Wheel Tractors in Bangladesh
The small size of average farms in Bangladesh makes 4WTs impractical to use for most farms in the region. Commonly used in more developed countries by commercial and private farmers, 4WTs are more expensive and less maneuverable than two-wheel tractors (2WT). 2WTs, resultingly, have become one of the most common agricultural machines used in Bangladesh.
Two-wheel tractors are single axle tractors commonly driven by a 10–12 HP diesel engine. The handles extend backwards towards the operator who walks, or in some cases—rides, behind the tractor. These machines are very valuable for smallholder farmers because they can pull a variety of different attachments such as trailers, cultivators, plows, seeders, and harvester attachments.
Many onion farmers in Bangladesh have already adopted the use of 2WTs in combination with a power-tiller operated seeder (PTOS) for the use of preparing and seeding fields. PTOS attachments, like the one shown in Figure 1, till the ground while sowing seeds and fertilizer simultaneously.

Figure 1.
Two-wheel tractor with a PTOS attachment [7].
1.4. Proposal for an Onion Transplanter for Smallholder Farmers
As part of a large initiative to promote mechanization in Bangladesh’s agriculture sector, USAID’s Feed the Future Bangladesh Cereal Systems Initiative for South Asia—Mechanization and Extension Activity (CSISA-MEA) is working to develop and promote scale-appropriate agriculture machines that are manufacturable and serviceable in Bangladesh [8]. Stakeholders of the CSISA-MEA project have suggested that a mechanized solution to the labor intensive process of transplanting onion seedlings could be beneficial in promoting onion cultivation amongst smallholder farms in Bangladesh.
This paper presents a preliminary design for a mechanized onion transplanter intended to ease the labor requirements associated with transplanting red onion seedlings in Bangladesh [9]. The transplanter is designed to be attached to, and powered by, the 2WT and PTOS systems commonly used in Bangladesh, making it useful for the smallholder farmers that make up most Bangladeshi farmers. This paper also presents the results of an initial study of the design’s capability to perform its intended functions.
The prototype testing results presented in this paper provides evidence that transplanting onion seedlings can be achieved using this design. The functional design presented may serve as a starting point for future researchers interested in developing a more robust design.
2. Materials and Methods
2.1. Technical Requirements
Drawing on requirements from project stakeholders and agricultural standards, the main functional requirements shown in Table 1 are established [9]. Planting spacings and depth were derived from agricultural standards pertaining to best practices for growing onions [10]. Operational movement pace was based on the optimal movement pace for 2WT attachments [8]. Finally, the success rate of transplanting was established by project stakeholders.

Table 1.
Target specifications of the onion transplanter.
2.2. Design of the Transplanter
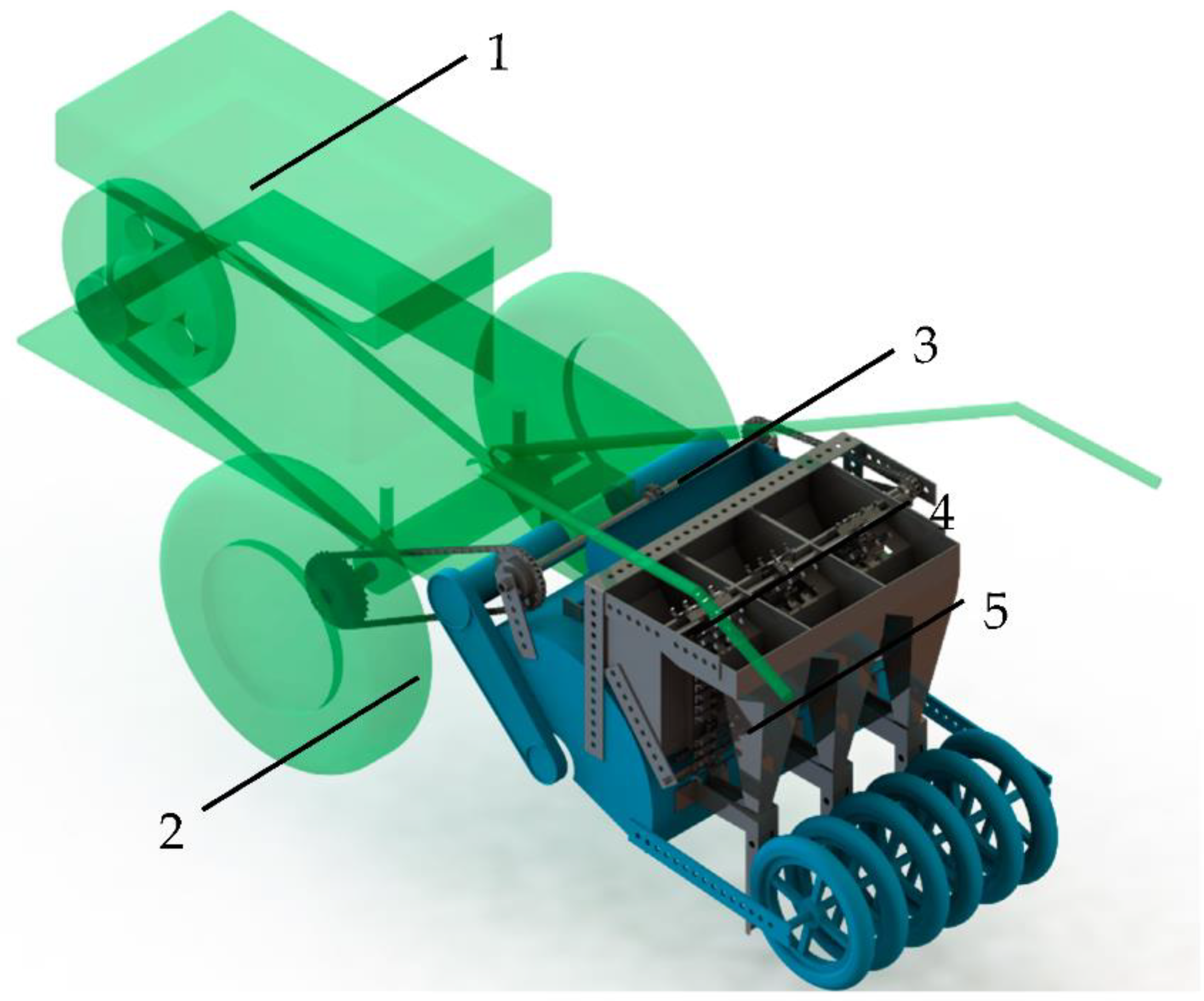
The onion transplanter consists of three subsystems, each designed to perform a specific set of functions. The three subsystems that make up the transplanter are the dispensing subsystem, the orienting subsystem, and the planting subsystem. The design of the transplanter is shown in Figure 2, which indicates the subsystems.
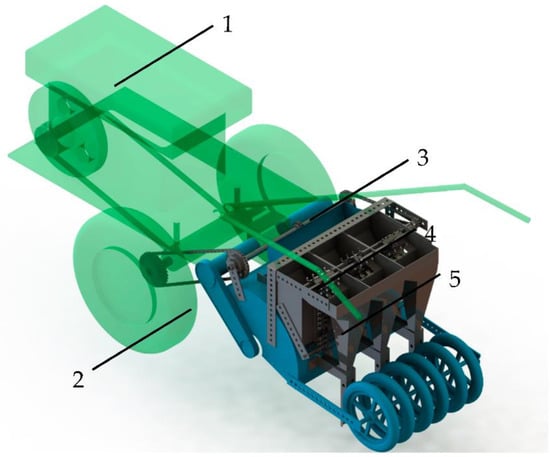
Figure 2.
CAD model of the onion transplanter, as attached to a 2WT and PTOS. (1) 2WT; (2) PTOS; (3) Dispensing subsystem; (4) Orienting subsystem; (5) Planting subsystem. This model was designed using SolidWorks Student Edition 2021.
The transplanter consists of three of each subsystem, placed side by side and attached to the tiller cover of the PTOS system. The side-by-side configuration of the system components allows the user to transplant three rows of onions with each pass of the field. The spacing between system iterations is 20 cm to comply with the technical requirement previously indicated.
Because the transplanter is intended to be manufactured and serviced in Bangladesh, material availability was a primary consideration throughout the design process. Similar machines and equipment, when manufactured in Bangladesh, are composed primarily of mild steel which available and affordable in the region. Therefore, all unique components of the transplanter were designed under the assumption that they would be made of mild steel. Common components such as sprockets, gears, shafts, and screws are also readily available. As such, no material specification is provided for common components.
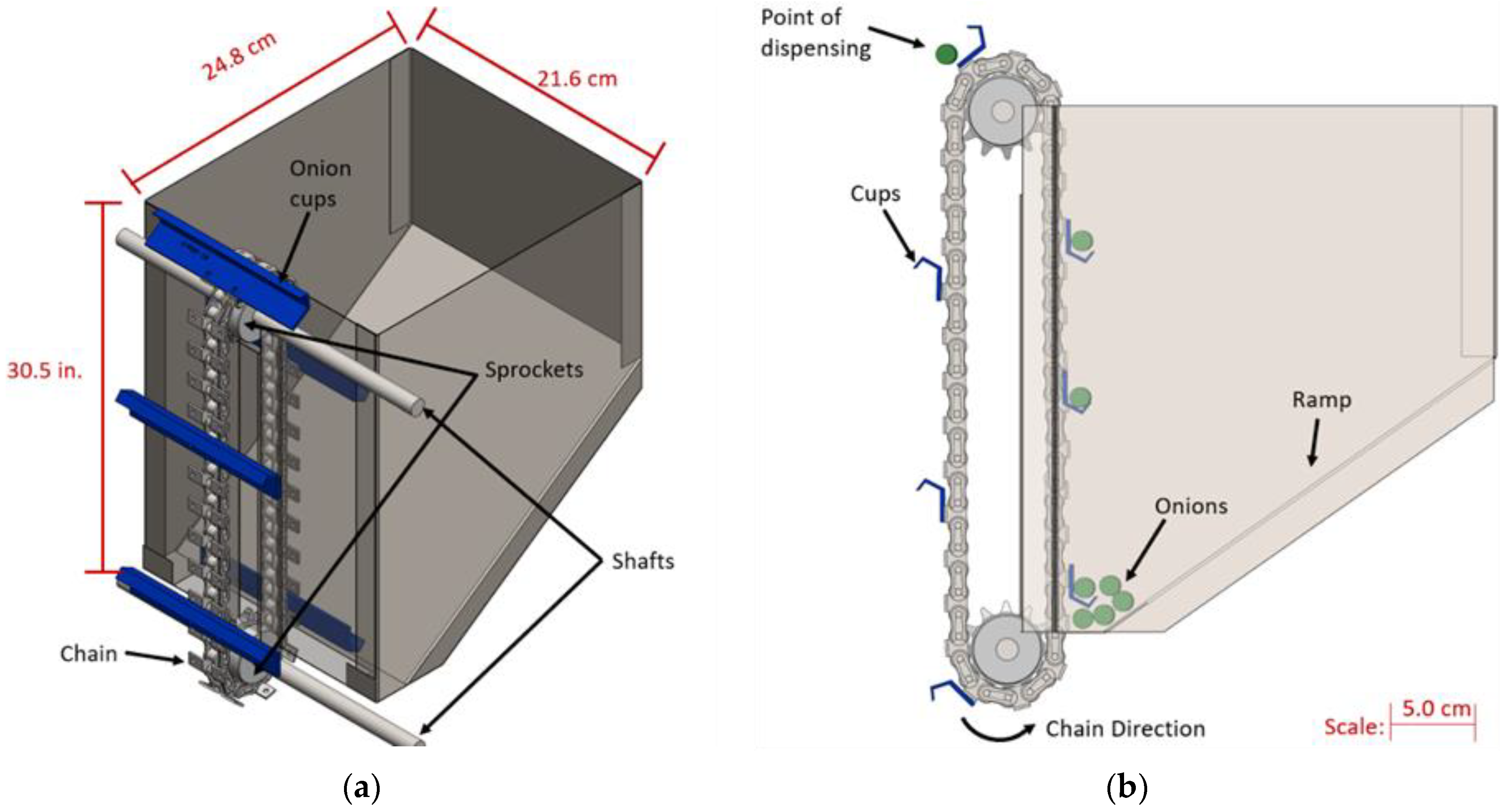
2.2.1. Design of the Dispensing Subsystem
The dispensing subsystem, shown in Figure 3, mimics the functional method of existing garlic transplanter machines which rely on chain-driven cups to separate and lift garlic cloves out of a hopper [11]. Similarly, onion seedlings are loaded into the onion transplanter’s hopper but are uniformly oriented (i.e., roots pointing toward the same wall) as shown in Figure 4. The ramp inside the hopper allows gravity to push the onions downward toward the onion cups, which separate and lift the seedlings as they rotate.
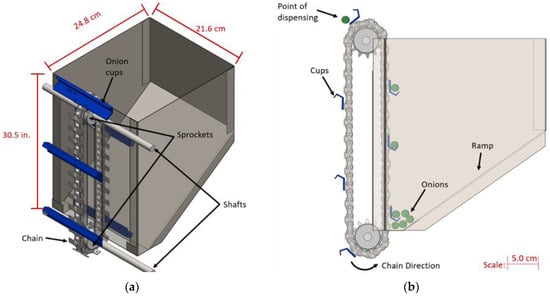
Figure 3.
(a) Isometric view of the dispensing subsystem CAD model; (b) Side view of the dispensing subsystem showing the various positions of onions during dispensing.
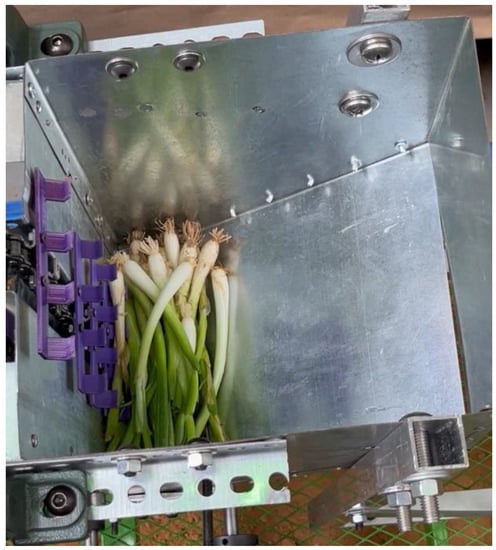
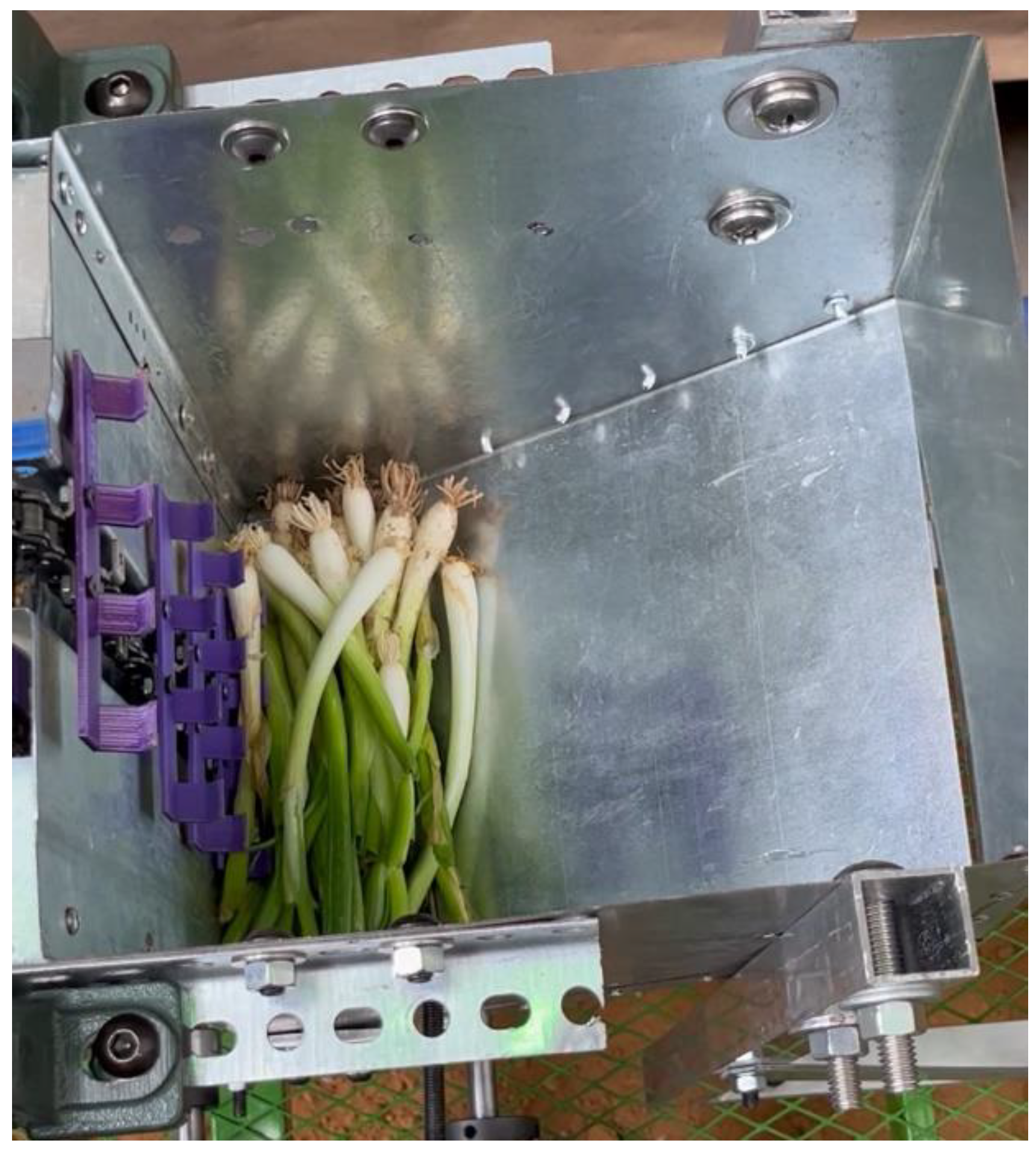
Figure 4.
Uniformly oriented onions in the dispensing subsystem.
Figure 3a shows the hopper, cups, sprockets, and shafts of the subsystem. Figure 3b shows a cross-sectional view of the subsystem, illustrating the travel path of the onion seedlings as they are separated at the bottom of the hopper and lifted until they are dispensed at the top.
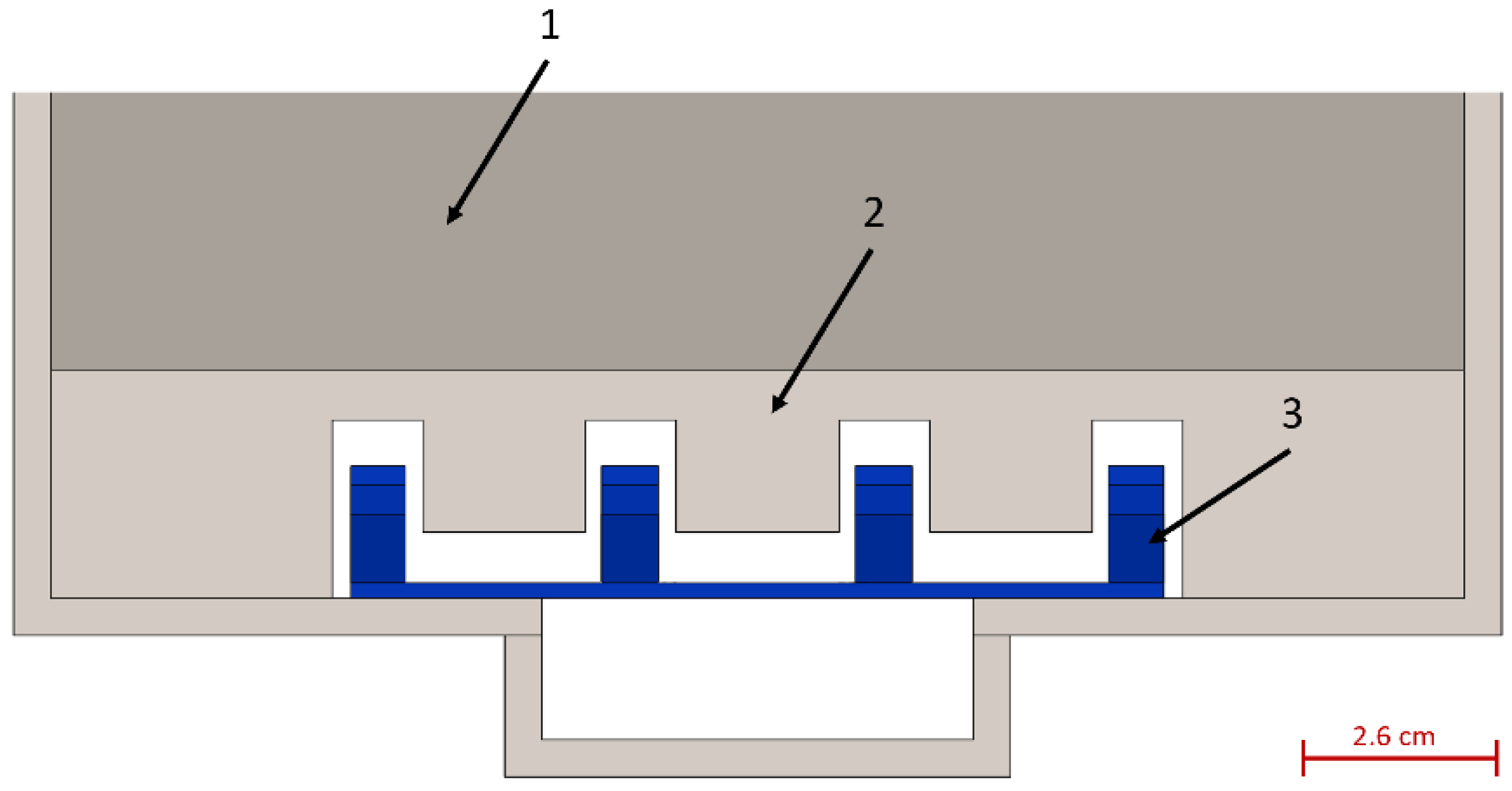
To ensure that the onions do not fall from the bottom of the hopper, a slotted door is utilized at the bottom, shown in Figure 5. The profile of the slotted door and the onion cups match such that the cups can pass through the door, while the door blocks onions from falling through.
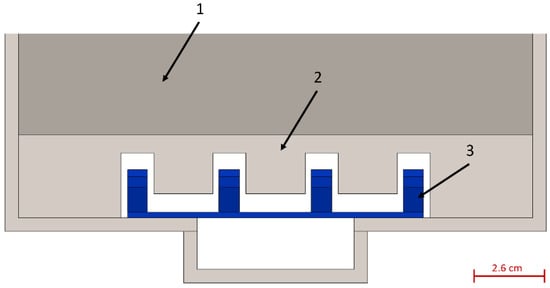
Figure 5.
(1) Ramp within the hopper; (2) Slotted hopper door; (3) Matching cups.
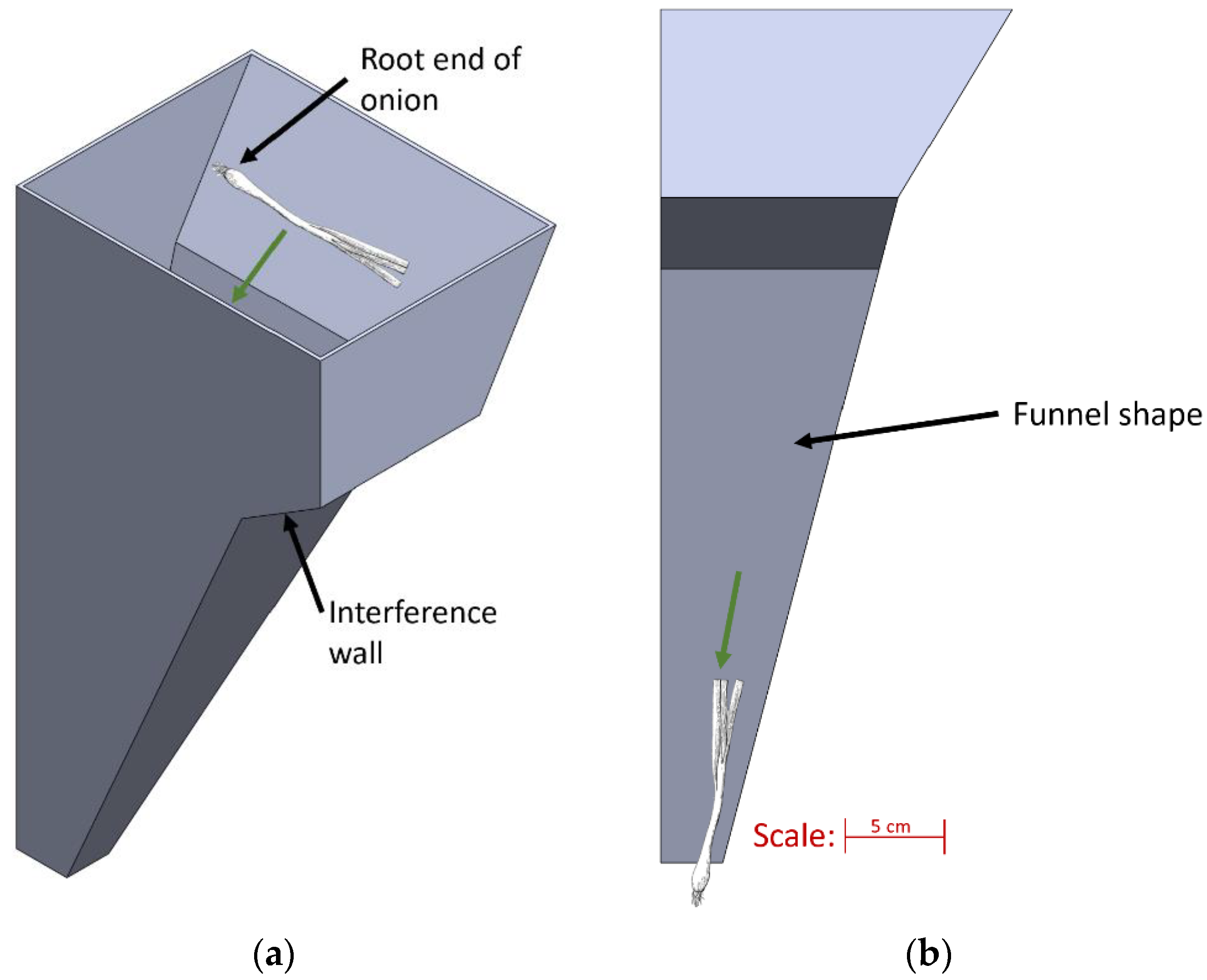
2.2.2. Design of the Orienting Subsystem
After the onions in the hopper are all oriented uniformly, they enter the next subsystem, the orienting subsystem. The orienting subsystem consists of a funnel designed to receive the dispensed onions and adjust their orientation such that the roots face downward.
As the onions are dispensed horizontally into the orienting funnel, the stalk end of the onions impacts the interference wall shown in Figure 6, causing the root end of the onion to orient downward (relative to the stalk end), thus orienting the seedling properly for planting.
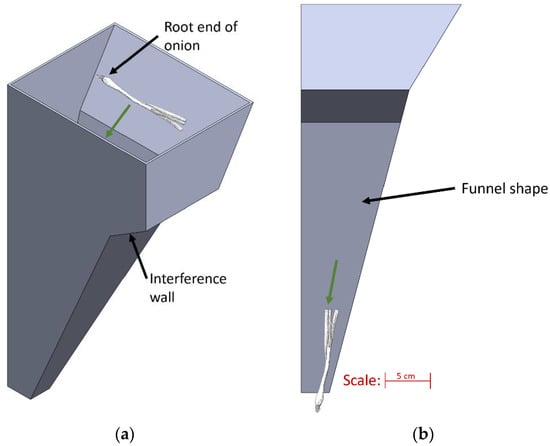
Figure 6.
Design of the orienting funnel. (a) Isometric view; (b) Right-side view.
2.2.3. Design of the Planting Subsystem
Existing onion transplanters typically utilize two methods of planting onion seedlings: punching mechanisms and furrowers. Examples of punching mechanisms and furrowing mechanisms are shown in Figure 7. Whereas punching mechanisms form discrete holes into which the onions are dropped, furrowing mechanisms typically drag a blade or blunt object through the ground which creates a furrow into which the onions are dropped. Given the correct soil conditions, gravity often will cause the furrow to fill itself in and bury the seedlings without additional input from the transplanter [12]. Typically, soils that are somewhat dry and have a fine till provide the ideal soil conditions for furrower transplanters like these. As onions grow best in a sandy loam soil, this method of using a furrower mechanism was implemented in the transplanter.

Figure 7.
(a) Punch mechanism [13]; (b) Furrower [14].
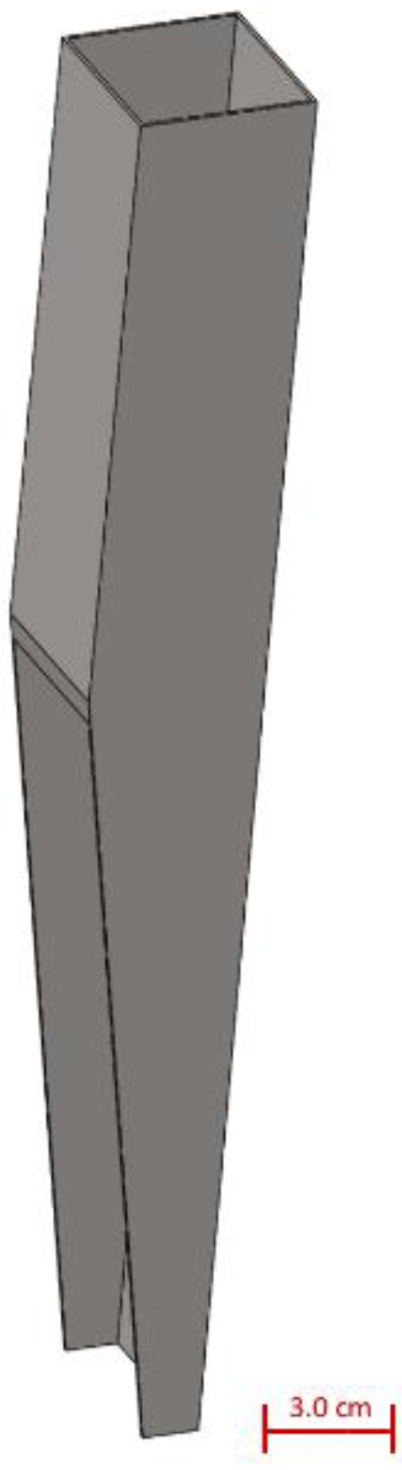
The furrower (Figure 8) is designed to be made of a square hollow tube so that the onions can be dropped through the furrower and into the ground as the furrow is being opened. The wide, blunt shape of the furrower creates a self-filling furrow wide enough for onion seedlings. In favorable soil conditions, as described above, the blunt shape of the furrower creates a furrow that tends to fill itself in, thus burying the seedlings after they enter the furrow.
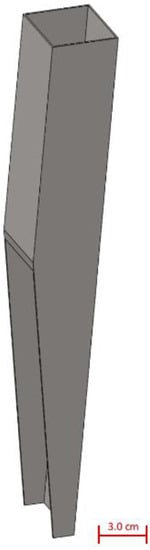
Figure 8.
Hollow furrower of the onion transplanter.
2.2.4. Design of the Powertrain
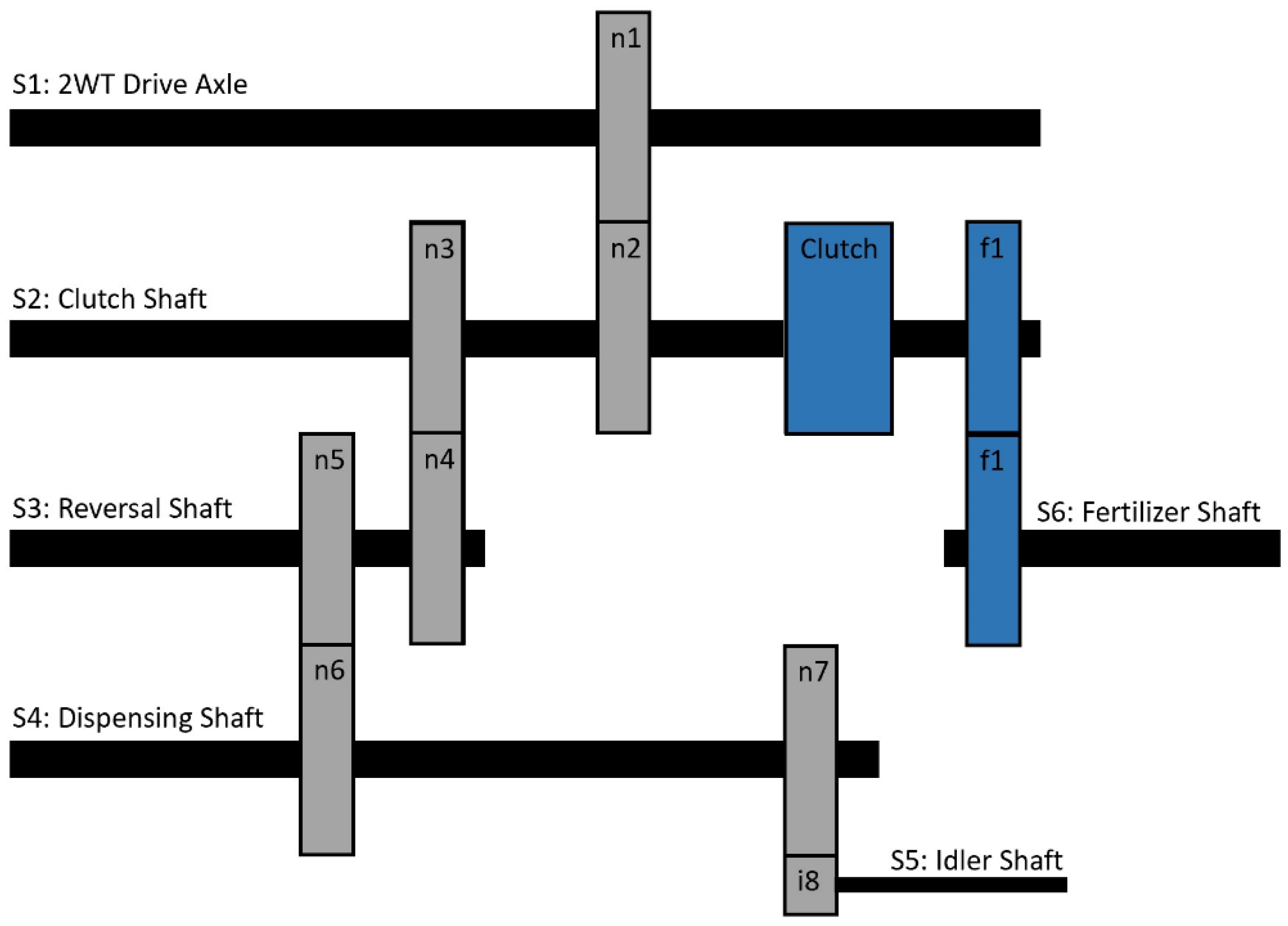
To ensure that the onion transplanter is active only while the 2WT is in motion, the transplanter is powered by the drive axle of the 2WT. A diagram of the powertrain designed to power the onion transplanter can be seen in Figure 9. Black rectangles represent the system’s shafts. Gray and blue boxes represent sprockets/gears used to transmit power between shafts. Gray colored boxes indicate that the components are included in the design scope of the onion transplanter, whereas the blue boxes indicate that the components are existing components associated with the design of the PTOS system [8]. The function of each shaft is described in Table 2.
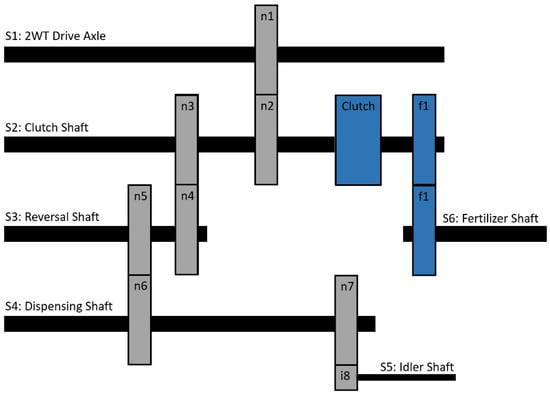
Figure 9.
Powertrain schematic.
Table 2.
Shaft labels and descriptions.
Knowing that the operational movement pace of the 2WT is 1.5 km/h (41.7 cm/s), the angular velocity of shaft S1, , and the dispensing rate of the onions, , are calculated as follows:
which can then be used to find the required angular velocity of the dispensing shaft, , and the overall gear ratio of the entire system, , knowing that the spacing between cups is 5.08 cm and the shaft diameter of the dispensing shaft is 0.72 cm.
With the final gear ratio, the number of teeth for sprockets and gears n1–n7 are selected according to Table 3.
Table 3.
Number of teeth for each sprocket/gear of the powertrain.
The actual overall gear ratio is then calculated as:
which varies only 0.7% from the gear ratio required to achieve a 10 cm onion spacing.
2.3. Prototyping and Testing Environment
2.3.1. Prototyping
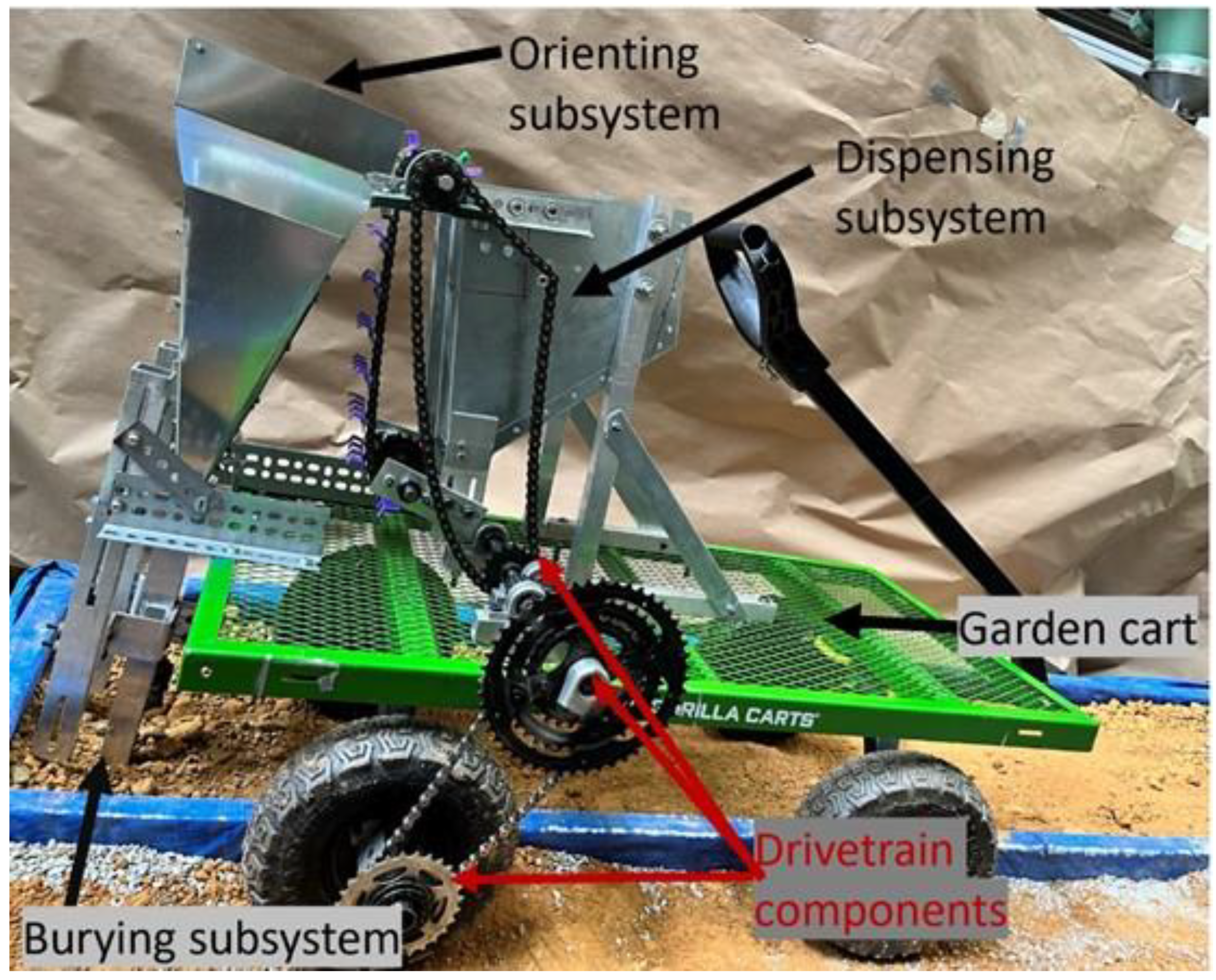
The transplanter design was modified slightly for purposes of testing. Instead of three rows, only one row of onions was planted during testing. It should also be noted that a 2WT was unavailable for testing. Therefore, the transplanter prototype was attached to a garden cart and pulled manually to simulate the motion of the 2WT. Accordingly, the gearing of the prototype was adjusted to accommodate for differences in speed and axle diameter between the 2WT and garden cart. The prototype used in testing is shown in Figure 10.
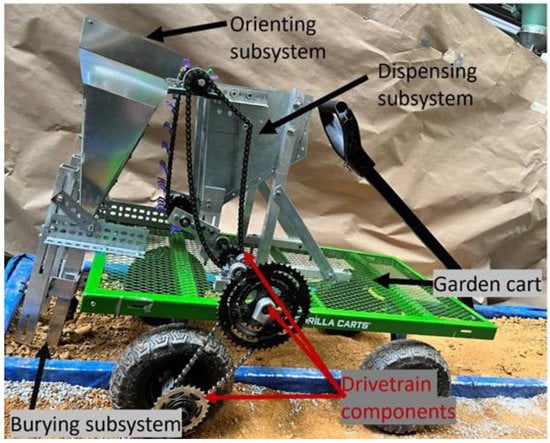
Figure 10.
Prototype of the onion transplanter.
Components of the prototype were made from readily available materials such that it could be made quickly. Although the materials used are likely to differ from the materials available in Bangladesh, they are unlikely to impact the functional performance of the prototype. Some common components such as chains and sprockets were used. The materials used to manufacture the unique components are listed below in Table 4.
Table 4.
Material Specifications of unique prototype components.
2.3.2. Testing Environment and Materials
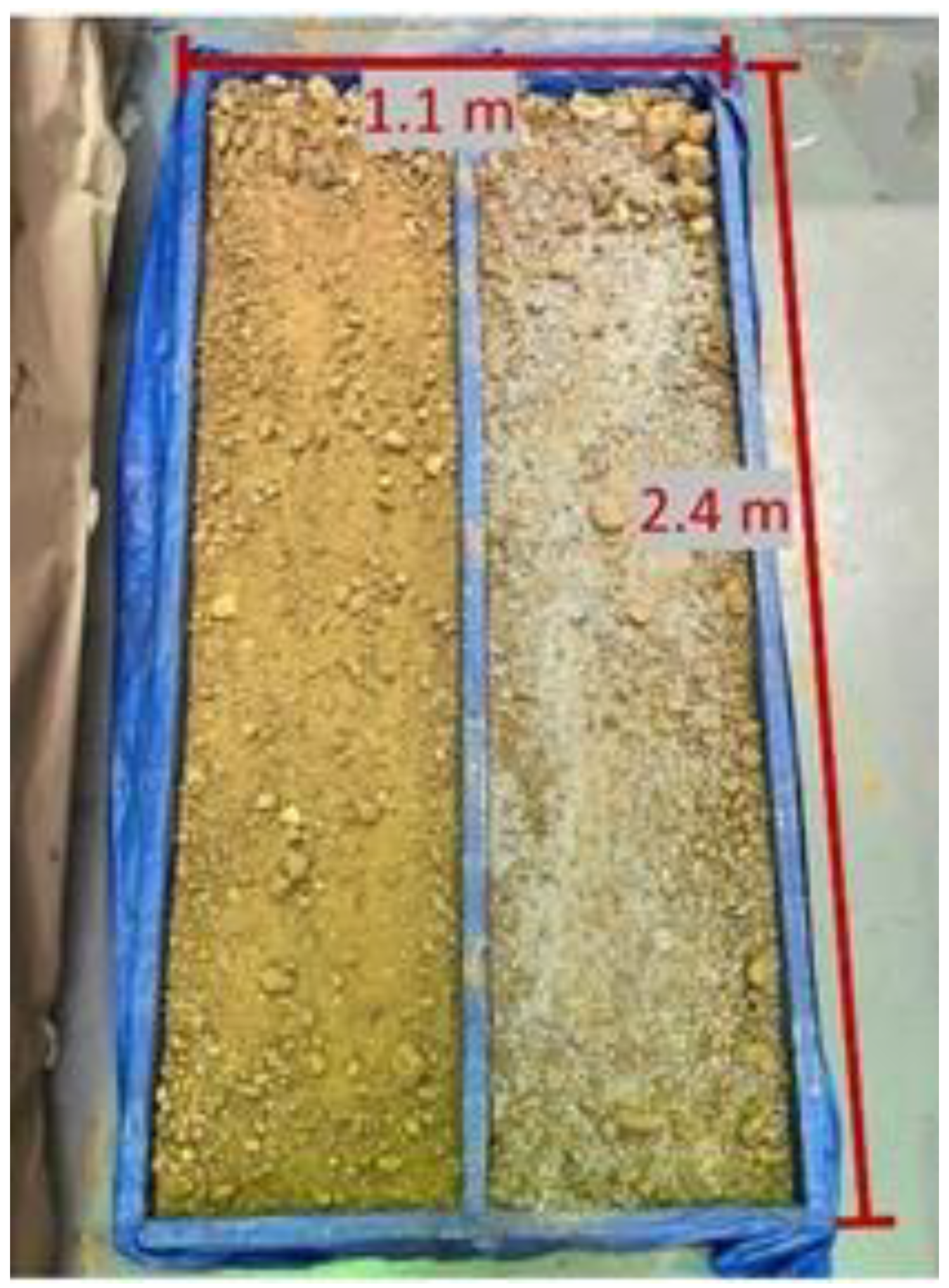
To facilitate controlled soil conditions, a test bed was made that consisted of two different soil types, as shown in Figure 11. Soil on the left-hand side of the test bed was native Georgia soil, which has a high clay content. Soil on the right-hand side of the test bed consisted of a mixture of native Georgia soil with a gravel pavement base, made up of roughly equal parts by volume.
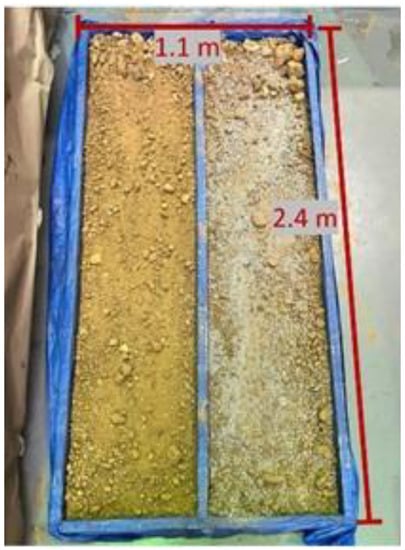
Figure 11.
Soil beds created to test the transplanter prototype.
Due to the highly perishable nature of onion seedlings and the short season in which they can be grown, it was not possible to test the transplanter with Bangladeshi onion seedlings. Therefore, two materials available in Georgia were selected as substitutes for testing: wooden dowels and scallions (green onions).
Wooden dowels were chosen for conducting preliminary testing because of their uniform diameter of 0.95 cm (3/8″) (close to the average diameter of scallions) and because they are straight. These attributes made dowels a good representation of the “ideal onion”. Hence, they would be easier for the transplanter to handle than a normal onion whose diameter varies and has a curved stalk.
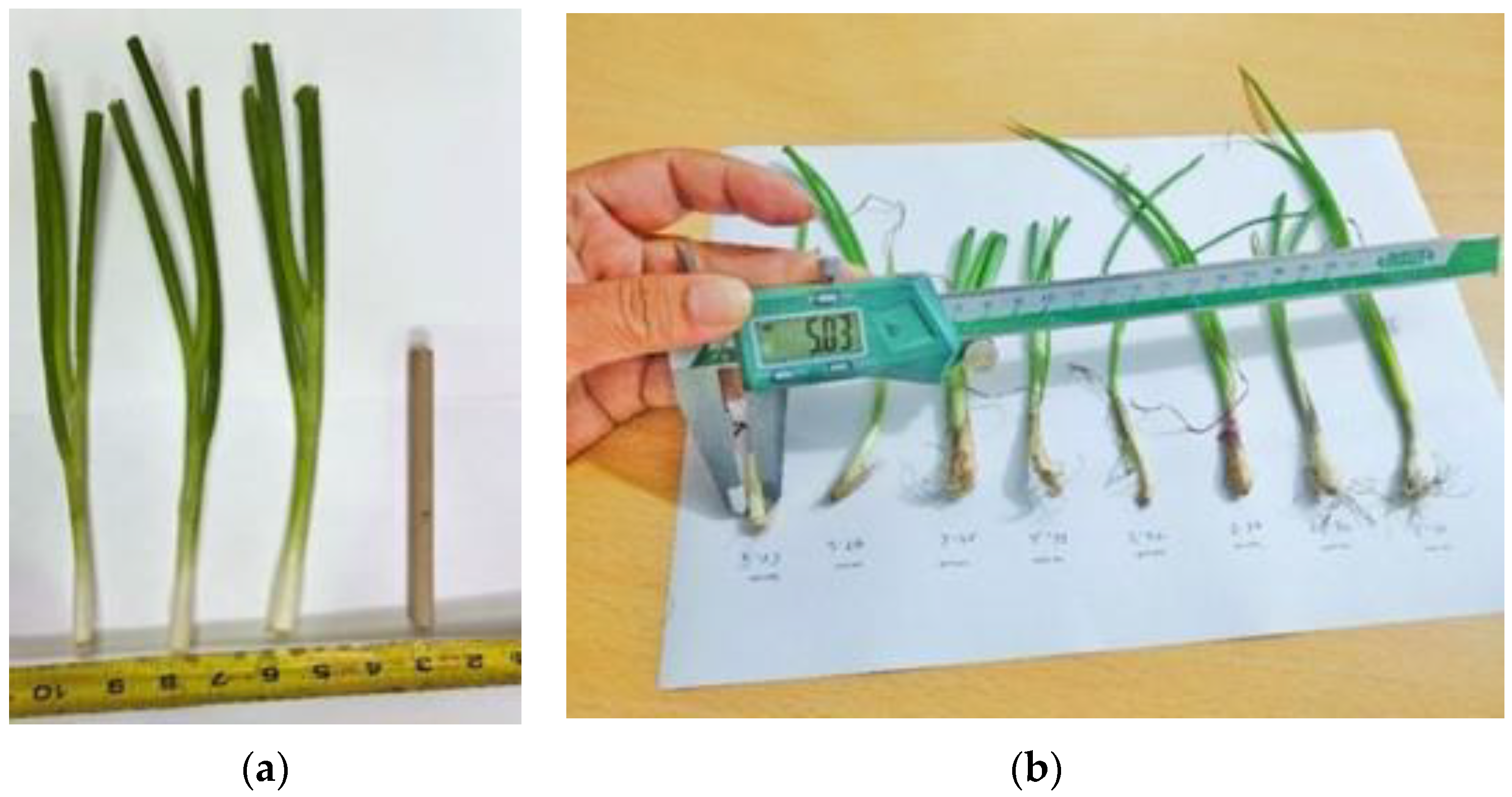
Scallions were a more accurate representation of Bangladeshi onion seedlings. The overall shape of Bangladeshi onion seedlings is very close to scallions, with common features including varying stalk and bulb diameters, divergences in the stalks, and an overall curved profile. Although similar in profile, it is noted that Bangladeshi onion seedlings tend to be smaller than the mature scallions used in testing. Shown in Figure 12, the bulb diameter of measured Bangladeshi onion seedlings varied between 2.5–7 mm.
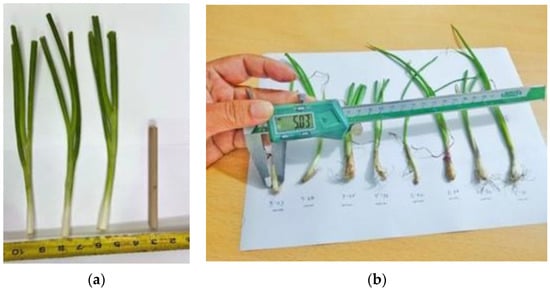
Figure 12.
(a) Scallions next toa 0.95 cm (3/8″) dowel; (b) Bangladeshi onion seedlings.
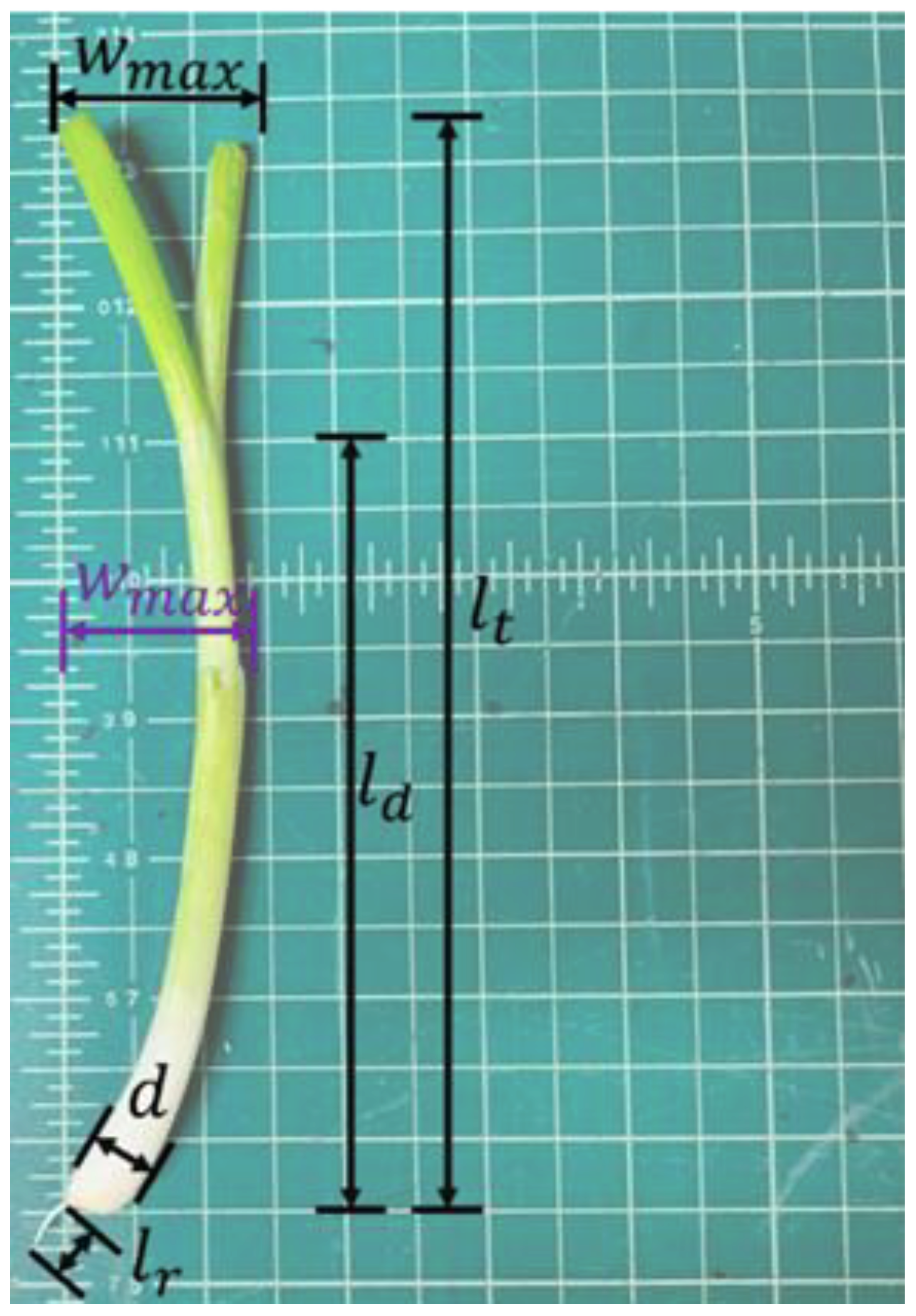
A profile of the scallions was created by taking various length and width measurements, which can be seen in Figure 13.
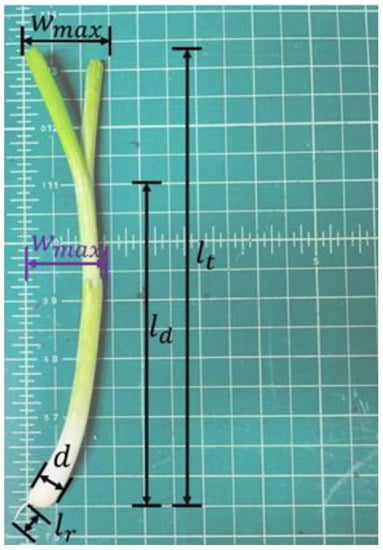
Figure 13.
Measurements used to characterize the scallions. The parameters are: is the maximum width of the onion which typically occurred in either of the two places shown, is the length from the onion bulb to the point where the stalk diverges, is the length of the roots, is the bulb diameter, and is the total length of the onion.
Using a sample size of 83 scallions, the average measurements were found and are shown in Table 5. These characteristics were used to adjust the cup size of the transplanter from the original design, for which the cup size was intended for the smaller Bangladeshi seedlings.
Table 5.
Average measurements of scallions.
2.4. Testing Methods
The prototype functionality was tested using the following test procedure:
- Record the number of onions placed in the hopper (N).
- Arrange onions such that all are oriented the same way and place them in the hopper.
- Pull the prototype the full length of the test bed.
- Record measurements of:
- a.
- The number of onions dispensed in the proper orientation (np ).
- b.
- The total spacing between each onion in the furrow (sx).
- i.
- Include all onions that were dispensed through the chute & furrower, even onions in the wrong orientation.
- c.
- The burial depth of all onions buried at an angle greater than 45° (db).
- i.
- Burial depth is given a value of 0 if dowel is buried at an angle less than 45°.
- ii.
- Include onions that are buried upside-down.
- d.
- The number of failures that occur (F).
- i.
- Failures include any onion that jams, is dispensed upside down, or falls out of the system by any means other than the funnel.
- e.
- The number of successes that occur (S).
- i.
- Include any onion that is planted upright at an angle greater than 45°.
- Remove any onions from the soil.
- Without removing any onions remaining in the dispensing cups, return the prototype to the start position.
- Rake the soil to remove the previous furrow.
- Repeat steps 2–7 until test is complete.
Previous research has shown that onions have far lower survivability when planted horizontally [15]. Anecdotally, it was observed that onions planted at an angle of 45° or greater, relative to the ground, remained upright after transplanting. Thus, onions planted with angles of 45° or less were not counted as successfully transplanted.
With the recorded data, the metrics in Table 6 are calculated in order to evaluate the overall performance of the transplanter.
Table 6.
Metrics and calculations used to evaluate transplanter performance.
The prototype was tested first with the 0.95 cm (3/8″) wooden dowels and then tested with scallions. Each test was performed using a varying number of onions (or dowels). The transplanter was first tested with a single scallion (or dowel) as a proof of concept. In each successive test, the number of onions (or dowels) was increased until the testing was completed. The results of testing are provided in the next section.
3. Results
Testing Results
A total of 50 dowels and 50 scallions were tested over the course of several tests following the procedure previously outlined. Figure 14 shows several onions that were successfully transplanted during the test. Using a normal distribution, 95% and 99% confidence levels were calculated using the normal distribution. Performance metrics and confidence intervals are shown in Table 7.

Figure 14.
Onions transplanted during testing.
Table 7.
Testing results of the transplanter prototype.
Data presented in this section represent testing in which the prototype was actuated under its own power utilizing the drive train made from bicycle sprockets. The dispensing rate was, therefore, dependent on the speed at which the garden cart was pulled. The target speed for the cart was 1 ft/s, but it was not possible to always meet this goal; therefore, deviations are not considered when presenting or discussing these data. The cart speed has the potential to affect any of the metrics of the system but was anecdotally observed to have a direct impact on the burial depth and the system’s ability to bury the dowels or onions at an angle greater than 45 degrees. This anecdotal evidence suggested that a lower cart speed would result in a shallower burial depth and in a smaller angle of burial (i.e., less than 45 degrees).
4. Discussion
The performance of the transplanter prototype can be compared to the transplanter’s established target specifications using Table 8.
Table 8.
Performance compared to transplanter’s target specifications.
Perhaps the most important metric from Table 8 is the success rate of transplanting, which reflects the transplanter’s ability to simultaneously achieve all of its’ intended functions. The limits of the confidence interval indicate that the researchers are 99% confident that the transplanter is able to correctly transplant 34–70% of the onions introduced to it. Because the upper limit of the confidence interval is below the target specification of 95%, it is clear that the prototype does not meet the target specification in its current state.
Similarly, the target specifications for onion planting spacing and onion planting depth fall outside of the limits provided by the 99% confidence intervals for their respective test results. This indicates that the prototype was not successful in meeting the target specifications.
It was observed during testing that the dispensing subsystem played the most crucial role in the transplanter’s inability to meet the target specifications. On many occasions, the cups would fail to pick up an onion as they travelled upwards through the hopper or onions would fall out of the cups before reaching the top of the hopper. Onions also were observed to become tangled with the cup prongs or with other onions, which could cause them to remain in the cup instead of being properly dispensed into the orienting funnel. Both of these phenomena resulted in irregular dispensing intervals and were a major cause of the high onion planting spacing and low success rate of the transplanter.
Along with the failures previously described, the success rate of transplanting was also reduced by the number of onions buried upside down. Onions that fell out of cups prematurely were the largest cause of improperly oriented transplants as well. Onions that fell out of cups and back into the hopper would often become misoriented as they fell. When they were later picked up and dispensed properly, they would enter the orienting funnel backwards and thus be buried upside down.
Although the prototype was unable to reach the target specification of 2.5 cm for planting depth, this is a shortcoming of the testing materials and environment rather than a failure of the transplanter. Because of the larger size of scallions and the high clay content of the soil, it was found that the onions would not remain standing upright unless buried to a depth of around 4.5 cm or more. This indicates that testing of the prototype will need to be performed with Bangladeshi onion seedlings in Bangladesh to properly assess the transplanter’s performance.
Row planting spacing and operational movement pace are validated by analyzing the final dimensions of the transplanter in the CAD model and the powertrain calculations, respectively. Prior to building the final transplanter, these characteristics can be checked and adjusted as needed to ensure fulfillment of the target specifications.
Although unable to meet the established target specifications, the prototype successfully demonstrated that the design is indeed capable of performing the functions required to transplant onion seedlings automatically. The design in this paper provides future researchers with a starting point that may be improved upon to achieve more consistent success and, thus, approach the target specifications.
5. Conclusions
The design of a mechanized onion transplanter for use by smallholder farmers in Bangladesh, is presented in this paper. The onion transplanter is designed to be attached to and powered by the two-wheel tractors that are commonly used throughout the country. The transplanter is projected to be capable of planting three rows of onion seedlings at the recommended spacing of 20 cm while requiring the labor of only a single individual.
A prototype of the transplanter was created for functional testing. Results of functional testing indicate that onions can be successfully transplanted using the machine, however, the prototype’s transplanting success rate of 52% falls short of the target specification. Most failures were attributed to inconsistency in the transplanter’s dispensing subsystem. Therefore, it is recommended that further development of the dispensing subsystem be performed to increase the transplanter’s overall performance.
Given that the intention of this study wisas to prove functionality of the presented design, some parameters remain unexplored or only partially explored. Future researchers are encouraged to explore ways to improve upon the current component designs in pursuit of a more robust design. Design parameters such as cup shape, funnel shape, furrower size, etc. will provide more opportunities for investigation.
The primary limitations of the study are the materials and testing environment with which the prototype was tested. Future testing should be conducted in Bangladesh with proper Bangladeshi onion seedlings to ensure that the transplanter performs with the materials for which it was designed.
Author Contributions
Conceptualization, S.S. and J.C.; methodology, S.S.; software, S.S.; validation, S.S.; formal analysis, S.S.; investigation, S.S.; resources, S.S. and J.C.; data curation, S.S.; writing—original draft preparation, S.S.; writing—review and editing, J.C.; visualization, S.S.; supervision, J.C.; project administration, J.C.; funding acquisition, J.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by USAID’s Feed the Future Bangladesh Cereal Systems Initiative for South Asia—Mechanization and Extension Activity.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Data can be found in the thesis associated with this project, located at https://smartech.gatech.edu/handle/1853/67282 (accessed on 1 September 2022).
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Gregg, E.S.; Colton, J.; Matin, M.A.; Krupnik, T.J. Efficient and Participatory Design of Scale-Appropriate Agricultural Machinery Workshops in developing countries: A case study in Bangladesh; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Bangladesh Bureau of Statistics. Report on Agriculture and Rural Statistics; Bangladesh Bureau of Statistics: Dhaka, Bangladesh, 2019. [Google Scholar]
- Gautam, M.; Ahmed, M. Too Small to be Beautiful? The Farm Size and Productivity Relationship in Bangladesh; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Kajol, R.H. Farming of Onion Seeds on the Rise in Faridpur; Dhaka Tribune: Dhaka, Bangladesh, 2021. [Google Scholar]
- Farha, A.; Shahanaz, B.; Uddin, J. An Overview of Studies on Summer Onion Production Technology. Int. J. Bus. Soc. Sci. Res. 2020, 8, 25–27. [Google Scholar]
- USAID. Scaling up of Agricultural Machinery in Bangladesh; USAID: Washington, DC, USA, 2016. [Google Scholar]
- Khan, M.S.; Jahan, S. Cranking, a Thing of the Past. 2019. Retrieved from CIMMYT. Available online: https://www.cimmyt.org/news/cranking-a-thing-of-the-past/ (accessed on 1 September 2022).
- Krupnik, T.J.; Valle, S.S.; McDonald, A.J.; Justice, S.; Hossain, I.G. Made in Bangladesh: Scale-Appropriate Machinery for Agricultural Resource Conservation; Mexico, D.F., Ed.; CIMMYT: Mexico City, Mexico, 2013. [Google Scholar]
- Stubbs, S.J. The Design and Testing of a Mechanized Onion Transplanter for Bangladesh. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2022. [Google Scholar]
- Nikus, O.; Mulugeta, F. Onion Seed Production Techniques; Master Printing Press Plc.: Asella, Ethiopia, 2010. [Google Scholar]
- Alibaba. Factory Price Garlic Seeds Planting Machine. 2022. Retrieved from Alibaba Website. Available online: https://www.alibaba.com/product-detail/Garlic-Planting-Machine-Factory-Price-Garlic_1700007799756.html?spm=a2700.pccps_detail.normal_offer.d_title.5a3f62577GA8Rn&s=p (accessed on 1 September 2022).
- Wei. Onion Planting Machine Working Condition. 2017. Retrieved from YouTube. Available online: https://www.youtube.com/watch?v=aSwXCVBpTec (accessed on 1 September 2022).
- Romiter Food Processing. Automatic 8 Lane Onion Transplanter Machine. 2017. Retrieved from YouTube. Available online: https://www.youtube.com/watch?v=zh9_sMflOHY (accessed on 1 September 2022).
- Pandirwar, A.; Kumar, A.; Singh, J.; Mani, I.; Bhomik, A.D. Development and Evaluation of a Semi-Automatic Six Row Onion Seedlings Transplanter. Agric. Mech. Asia Afr. Lat. Am. 2019, 50, 29–35. [Google Scholar]
- Lipe, W.N.; Thomas, D. Effects of Onion Transplant Pruning and Orientation on Plant Survival, Yield, and Size Distribution; Texas Agricultural Experimnet Station: College Station, TX, USA, 1980; pp. 28–29. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).