
Comparative Evaluation of Land Surface Temperature Images from Unmanned Aerial Vehicle and Satellite Observation for Agricultural Areas Using In Situ Data

 ,
,  ,
, 

Abstract
:1. Introduction
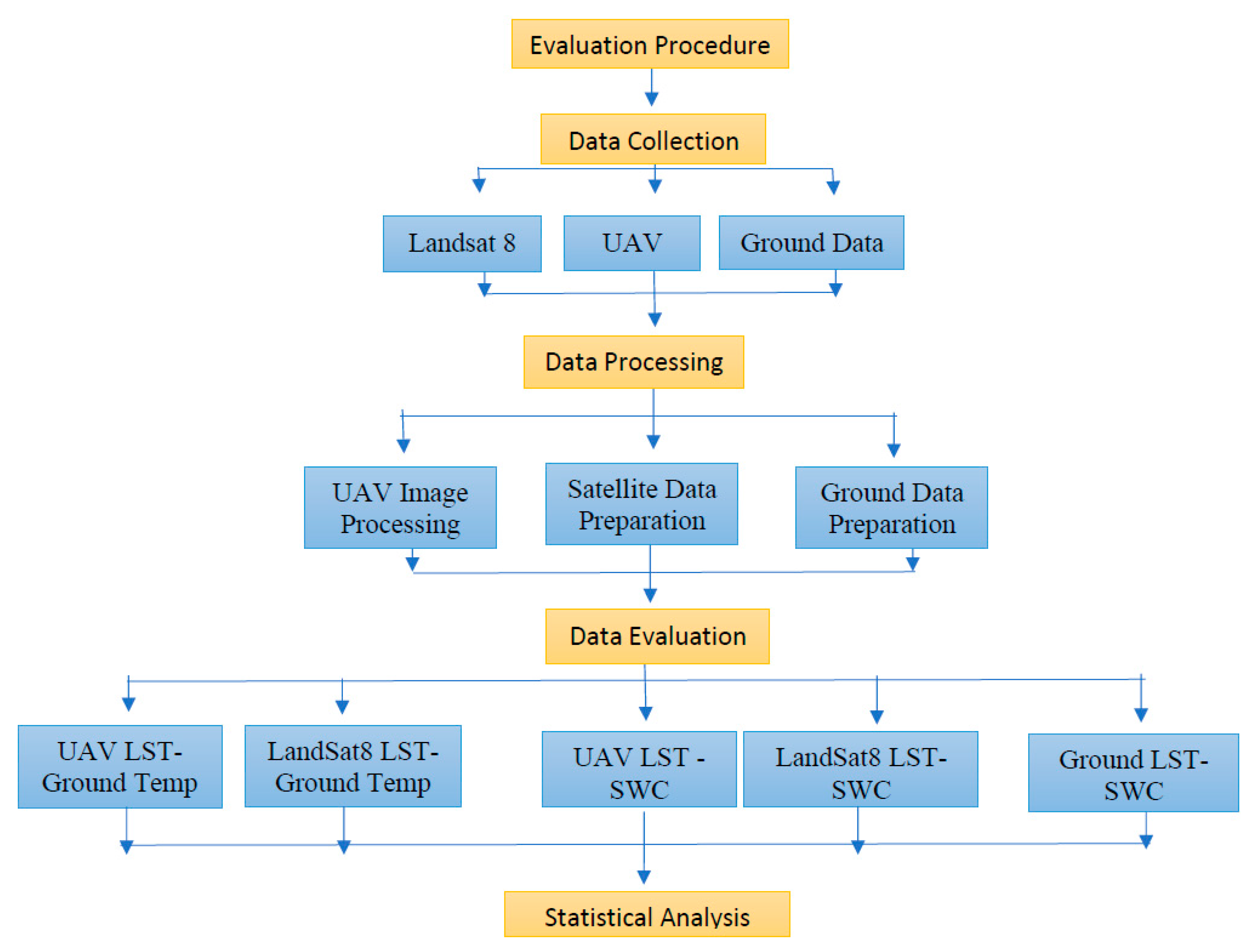
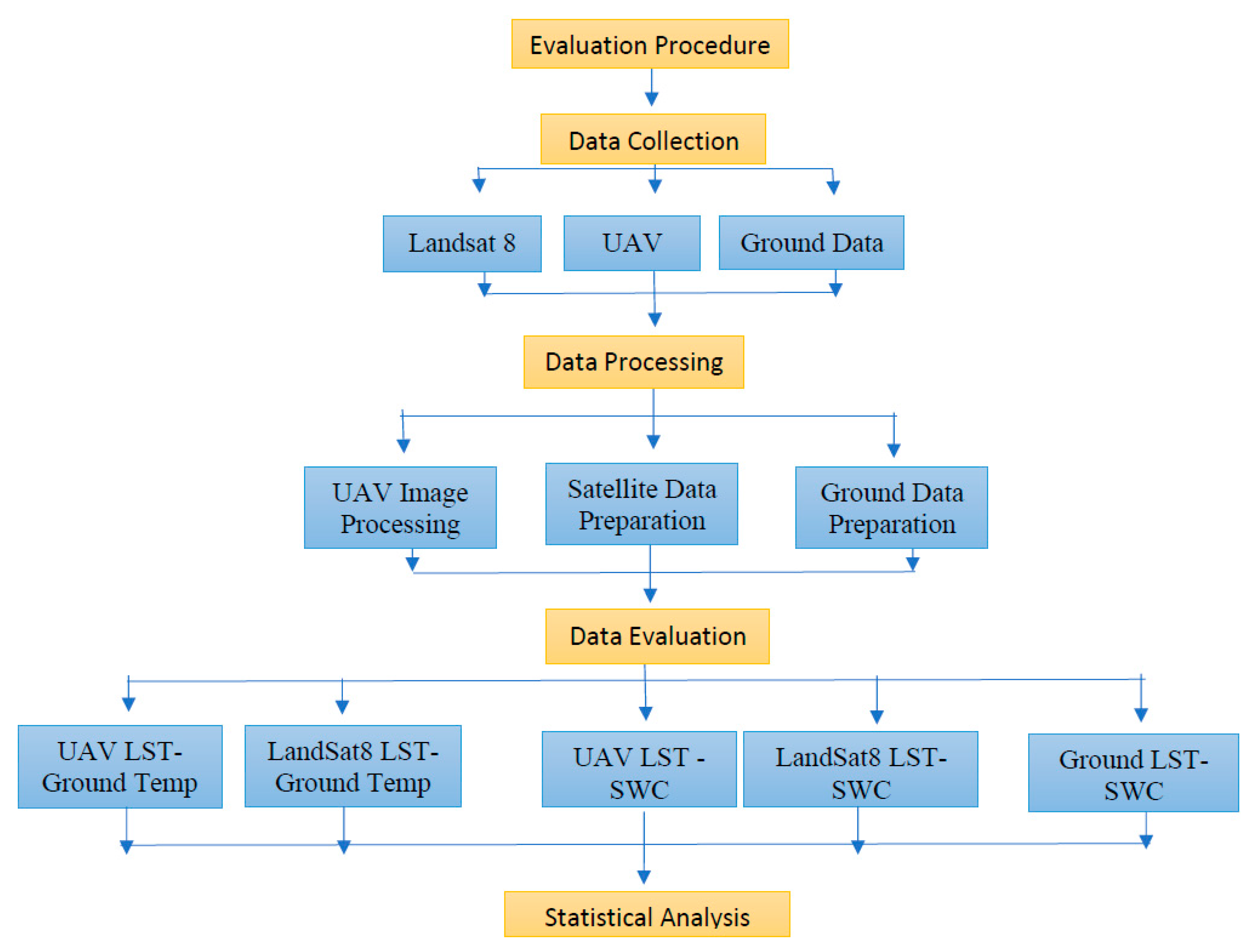
2. Materials and Methods
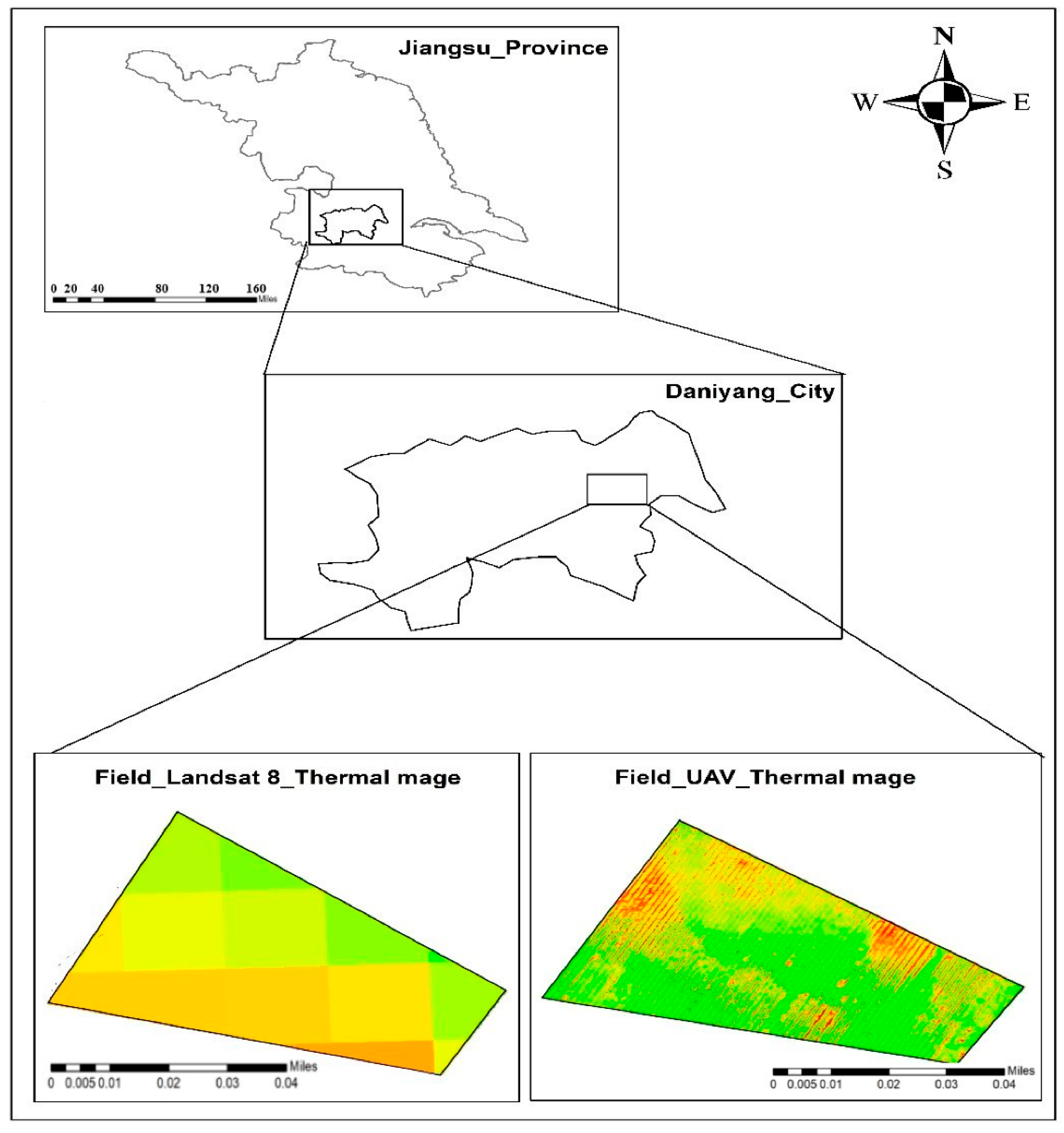
2.1. Study Site
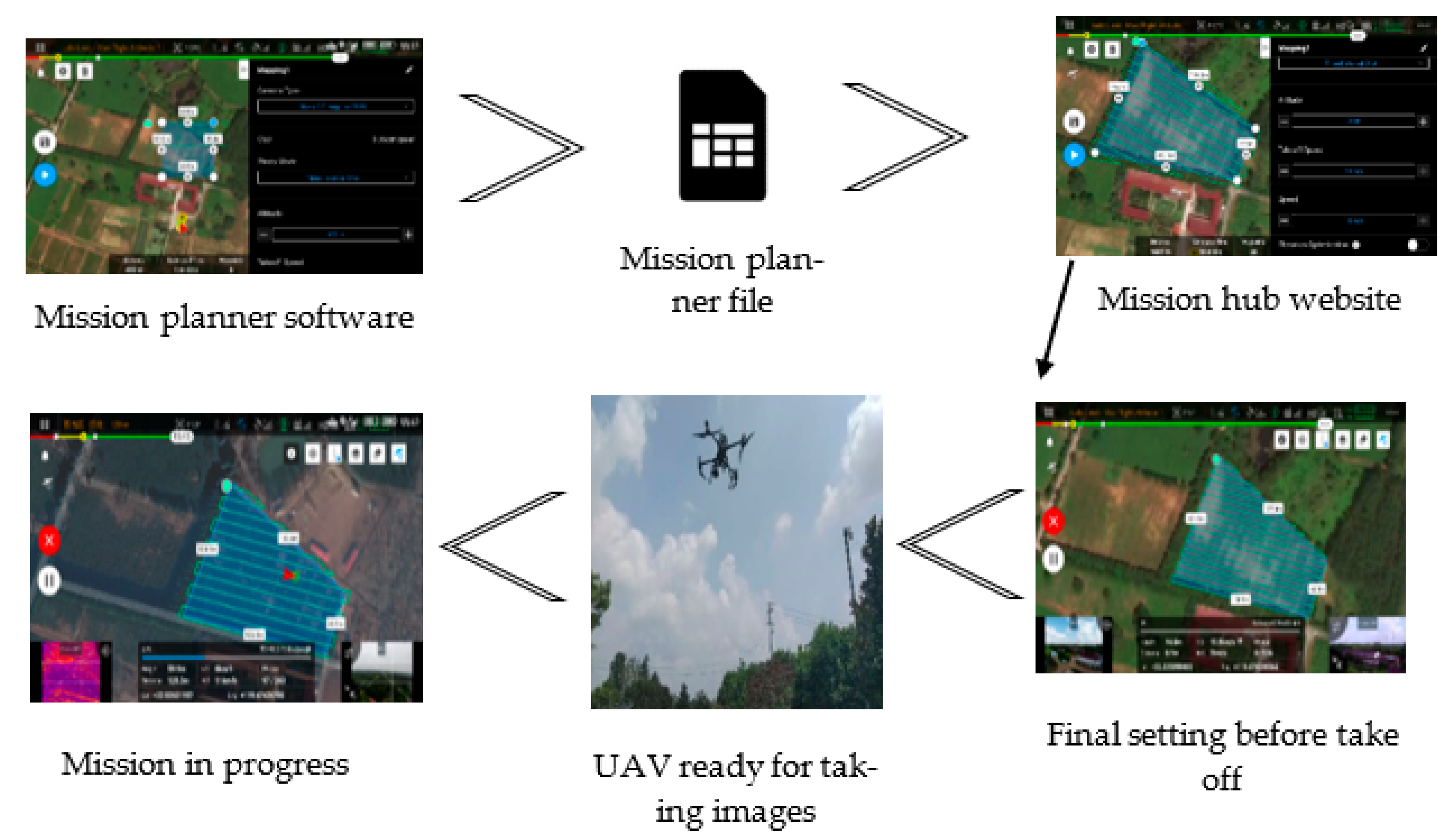
2.2. UAV Data Acquisition
2.3. Satellite and Aerial Remote Sensing Data
2.4. Retrieving LST Algorithm from Landsat Data
2.5. Single-Channel Algorithm
2.6. Comparison of UAV TIR LST with Satellite LST
3. Numerical Analysis
4. Results and Discussion
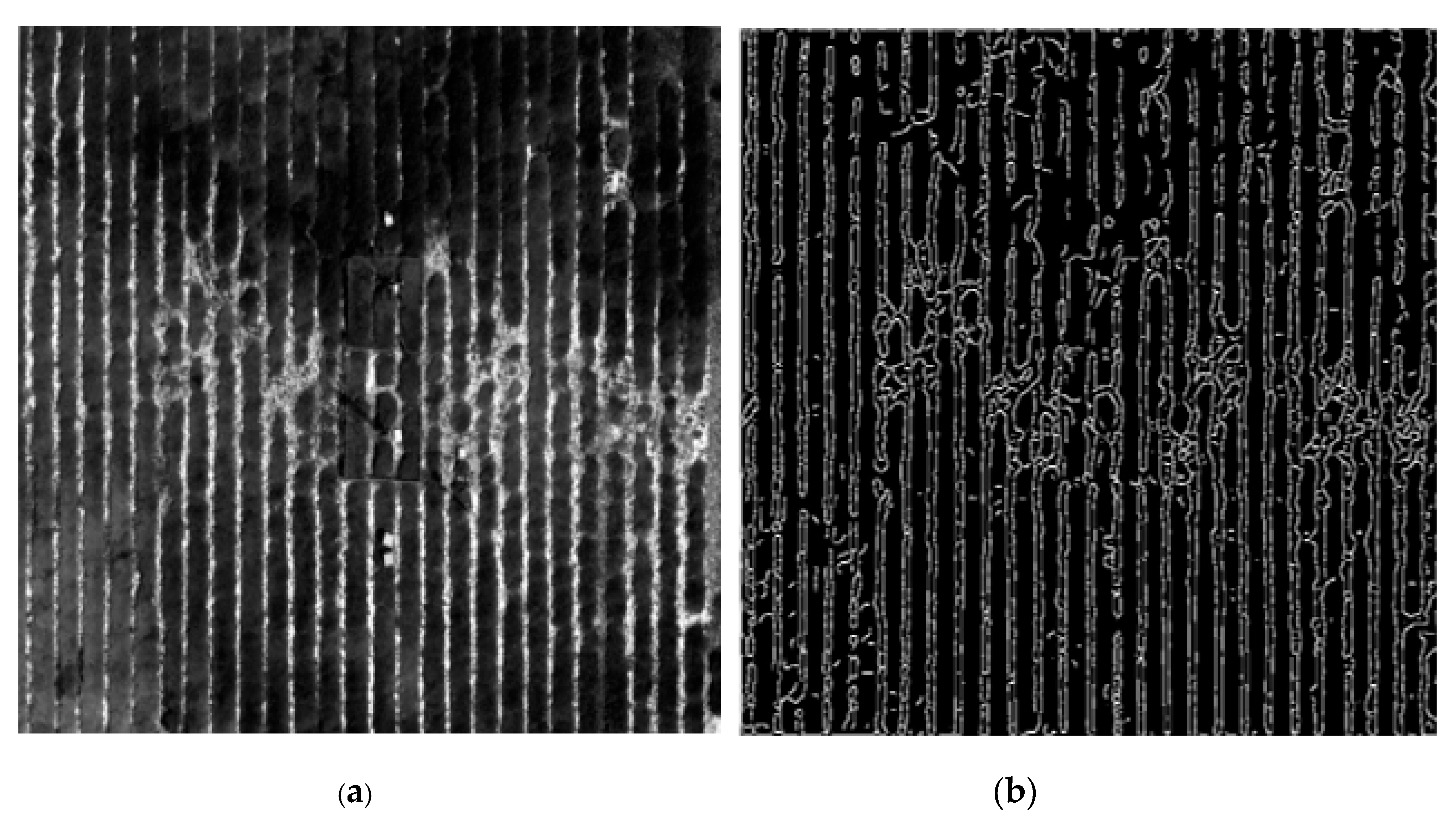
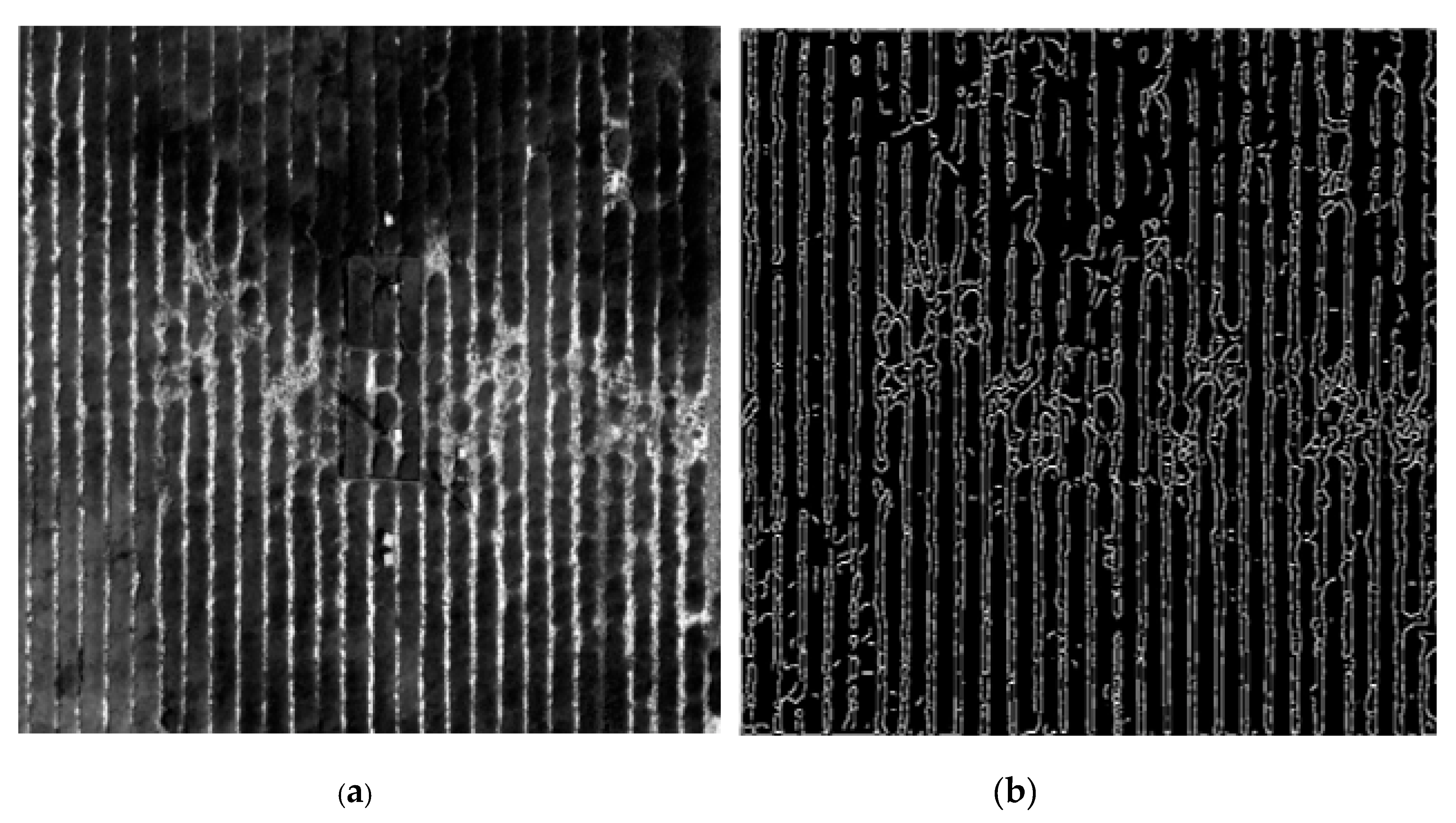
4.1. Soil Background Removal Validation
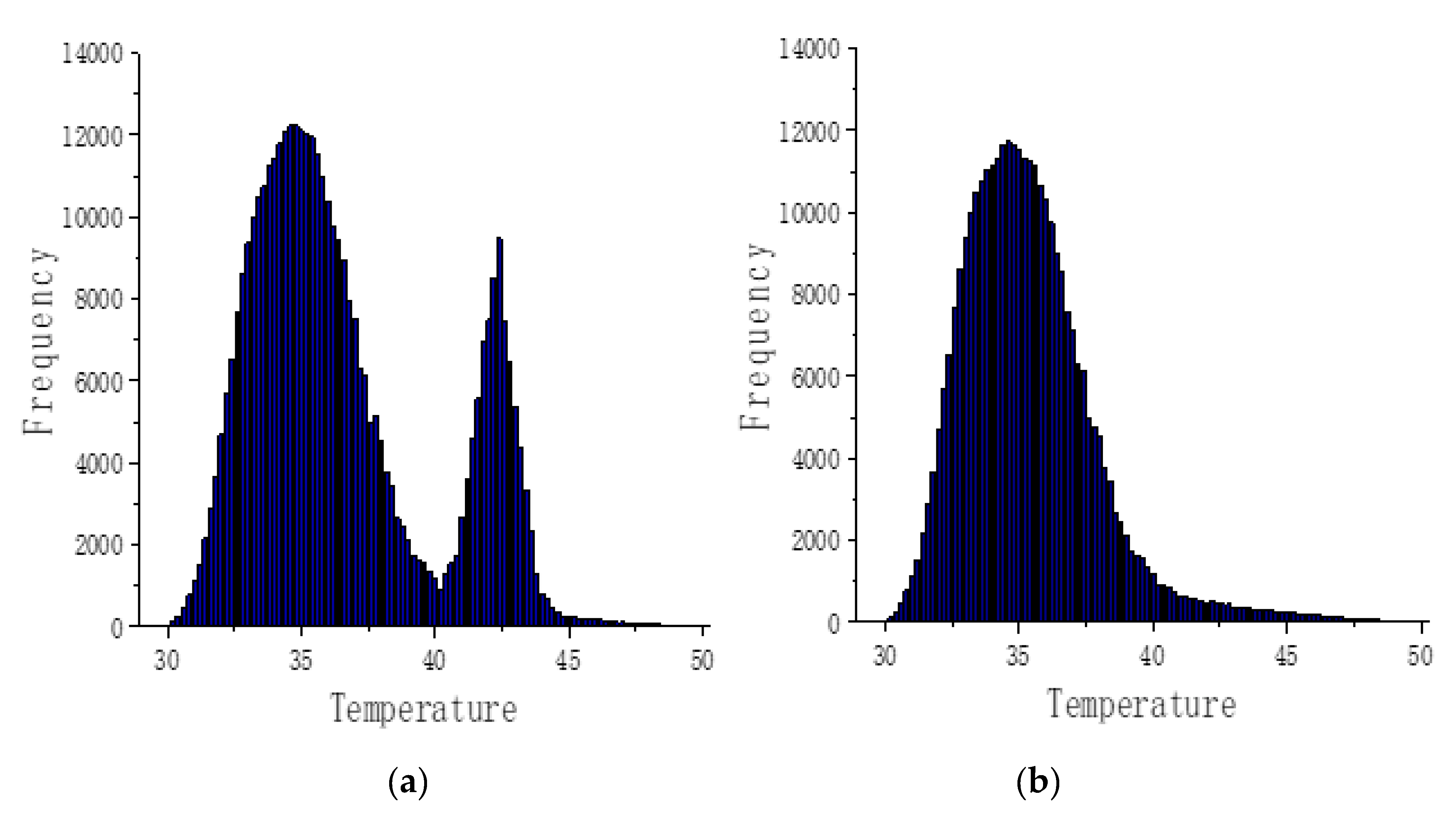
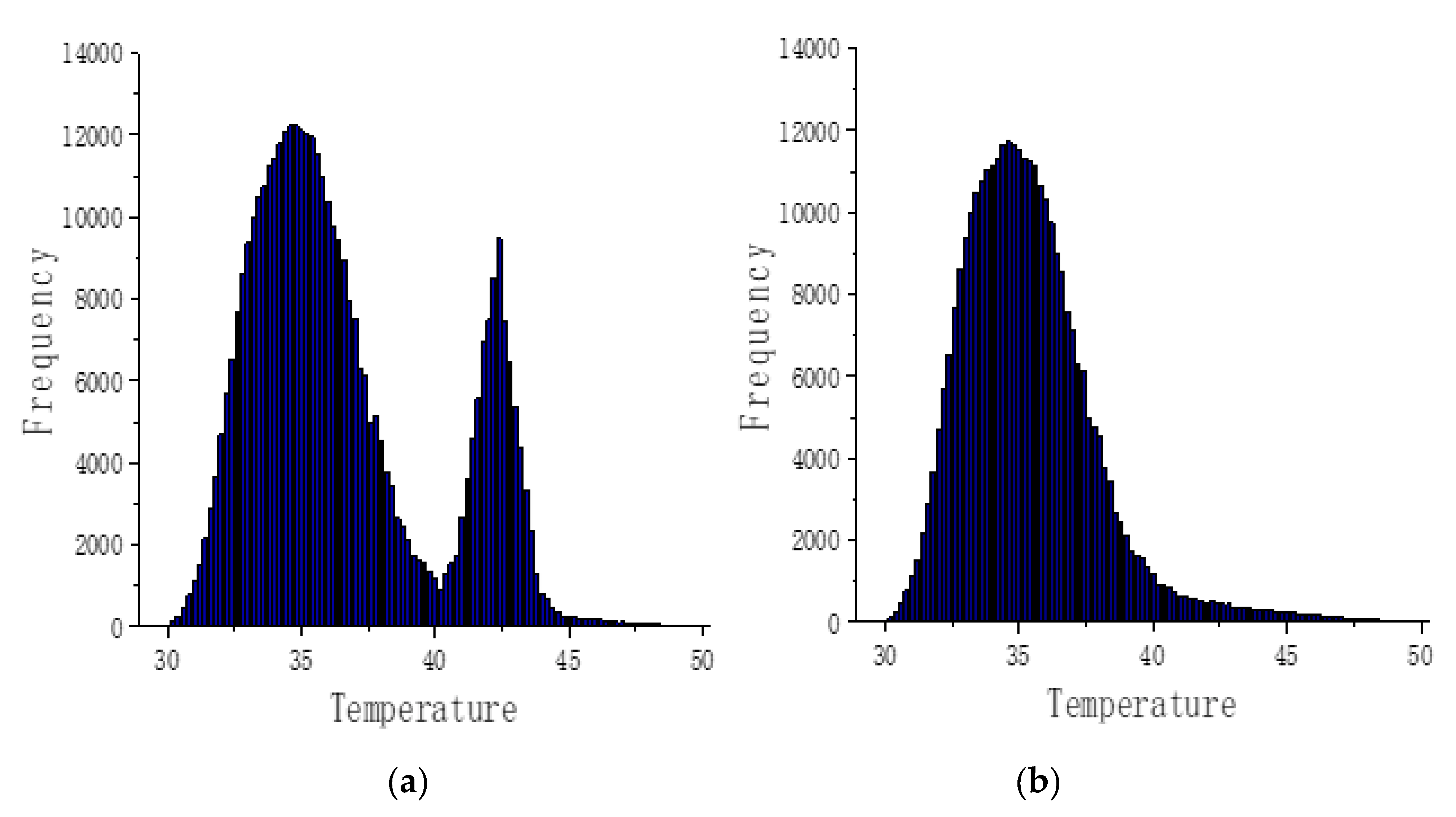
4.2. Histogram Analysis of Removal of Soil Background Temperature
4.3. Histogram Analysis of Removal of Soil Background Temperature
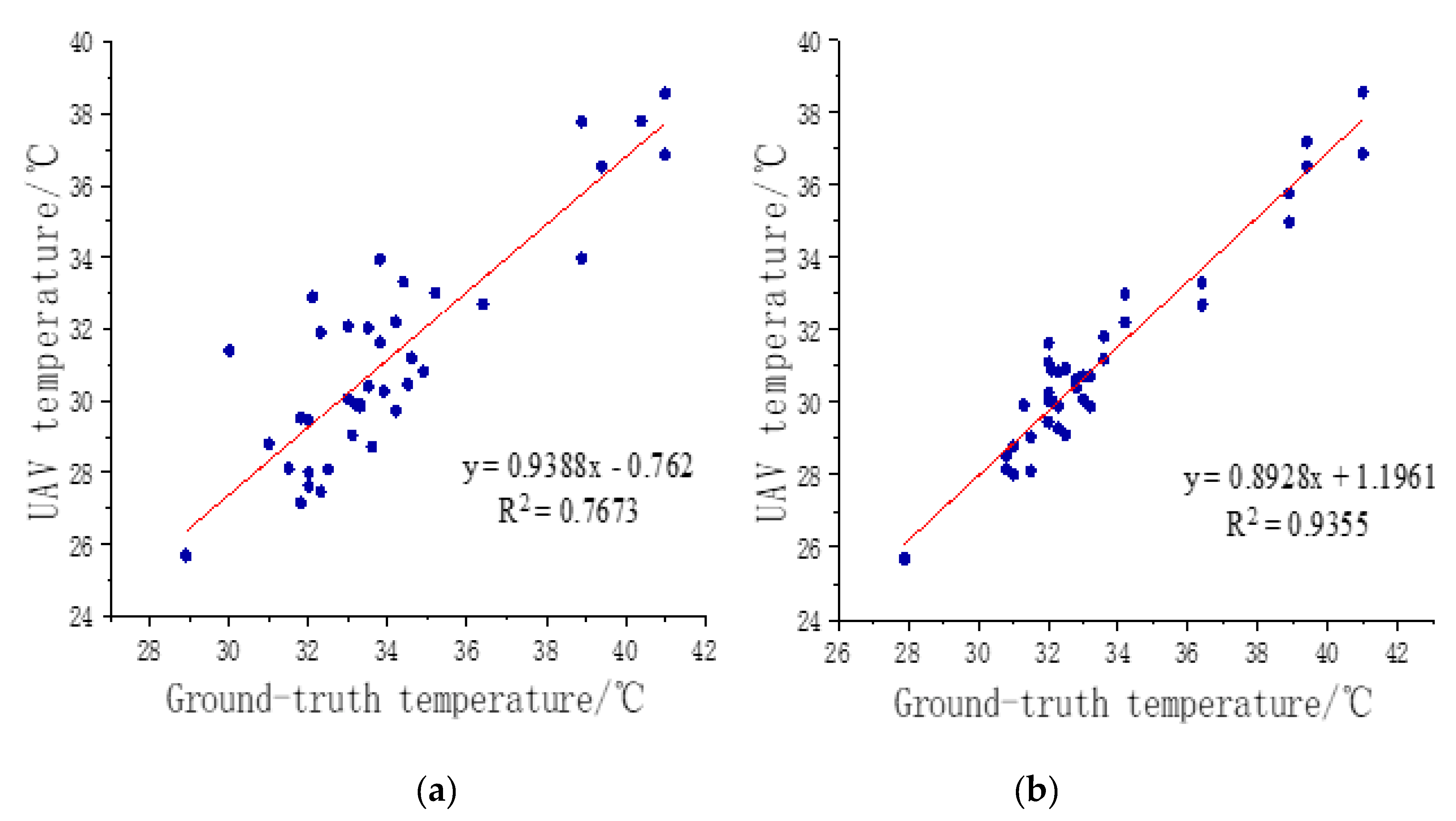
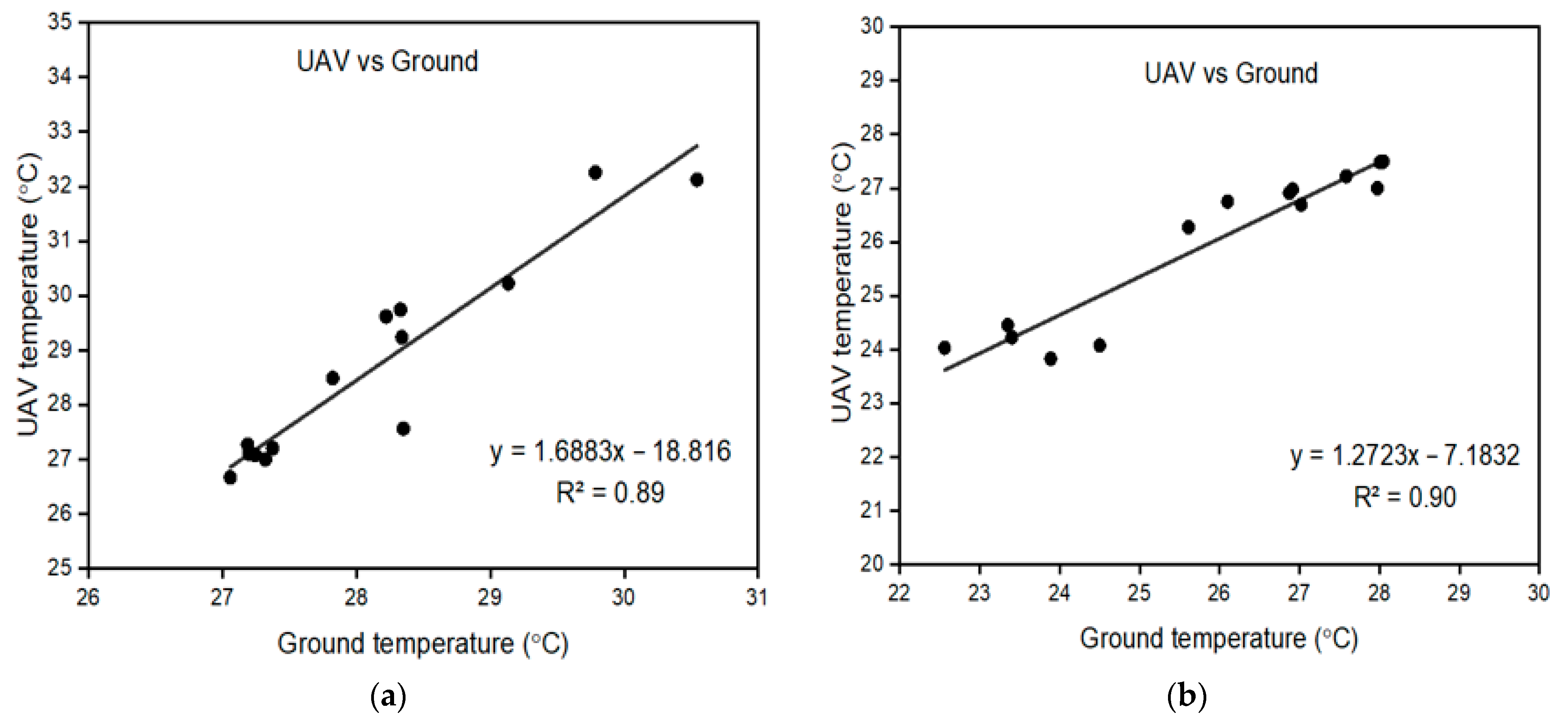
4.4. UAV-Ground LST Validation
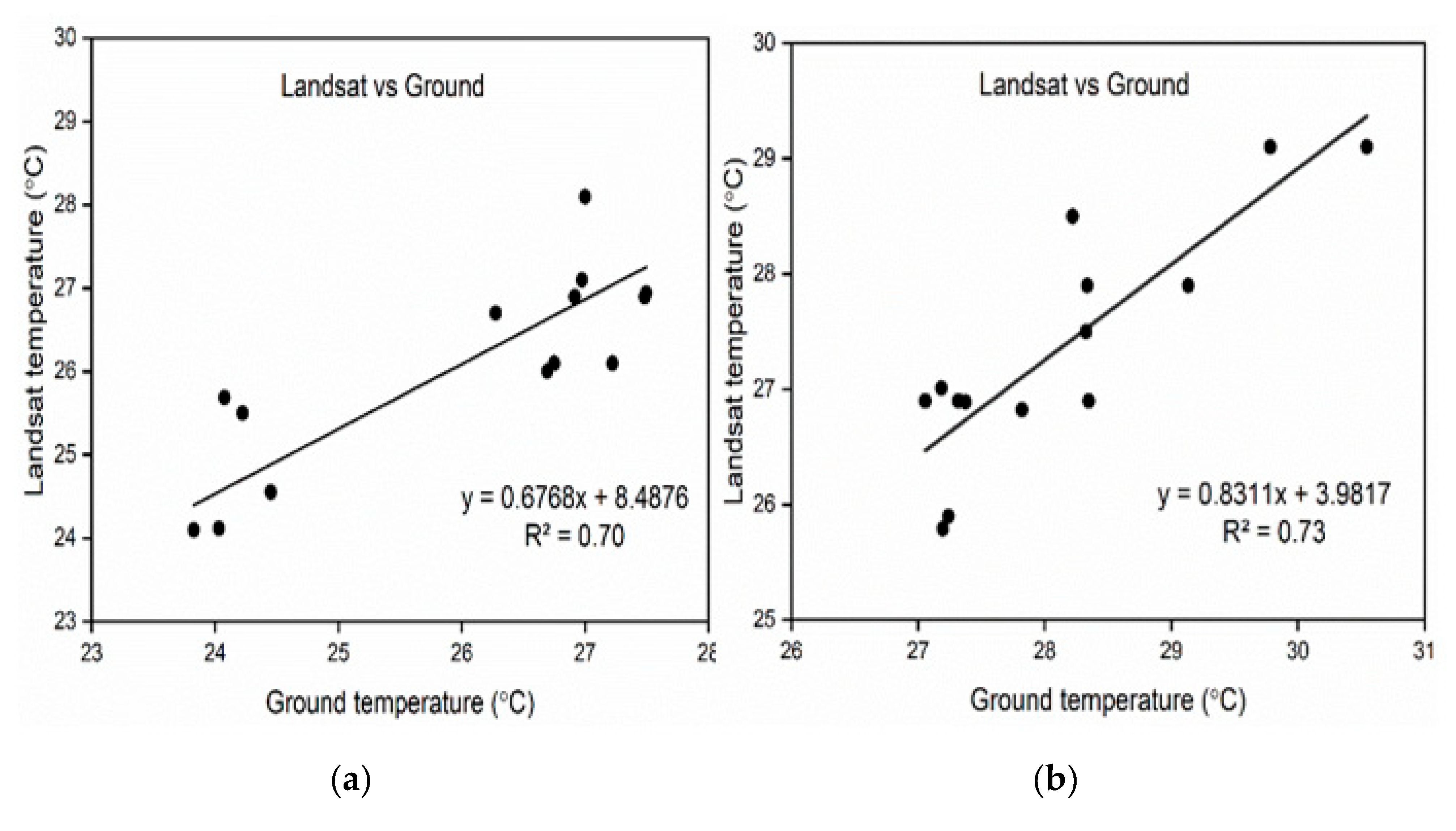
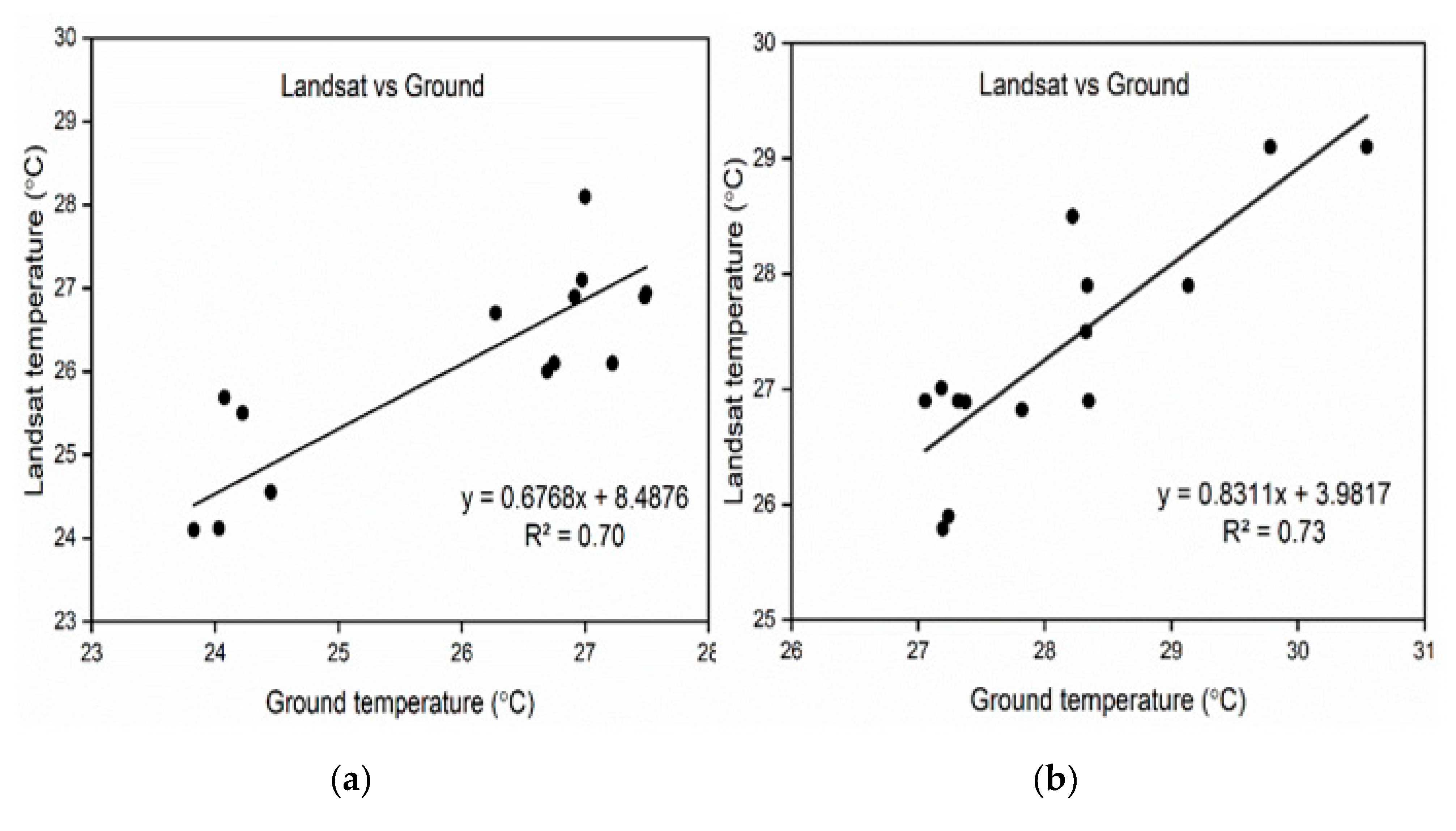
4.5. Landsat-Ground LST Validation
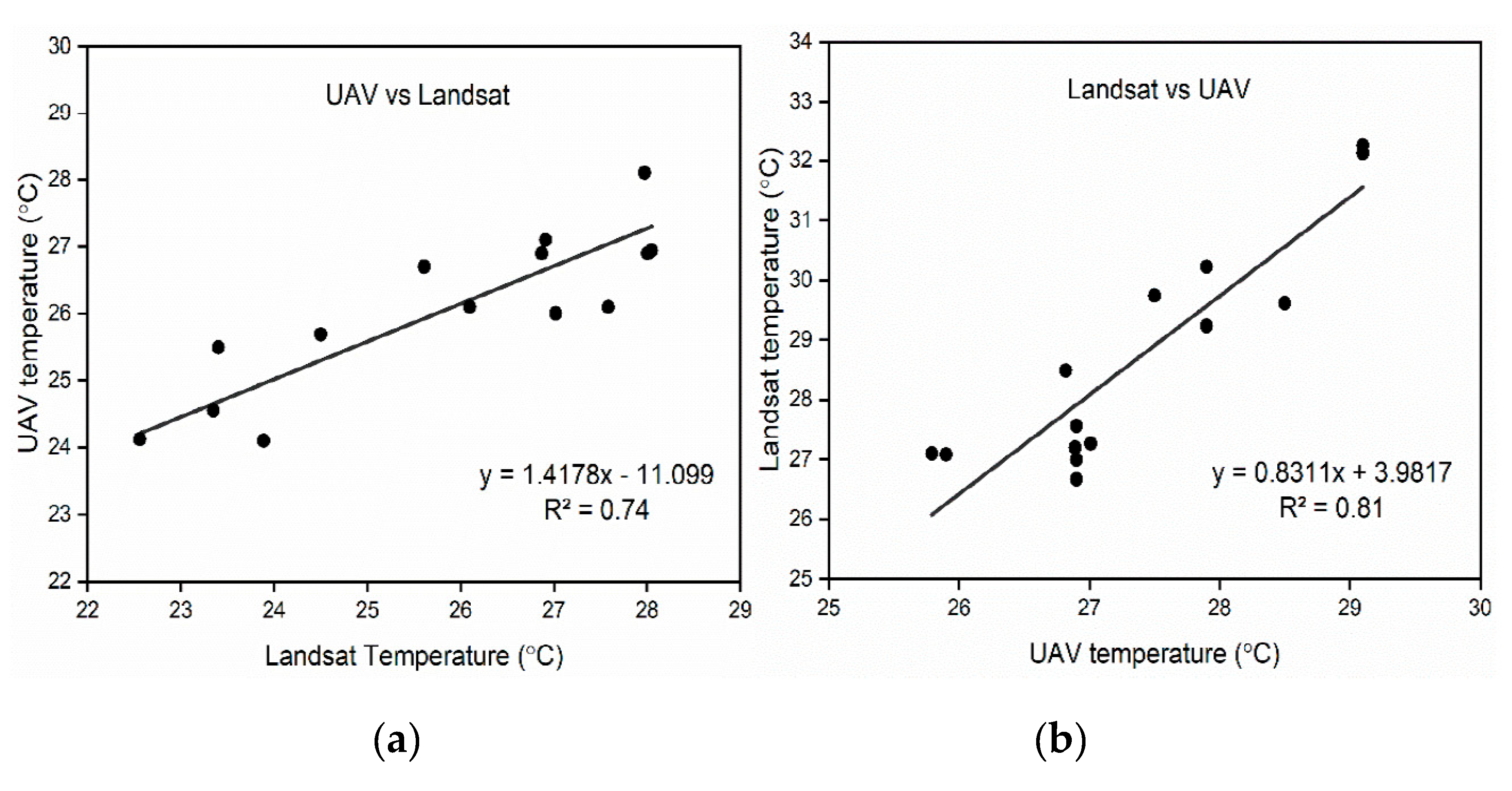
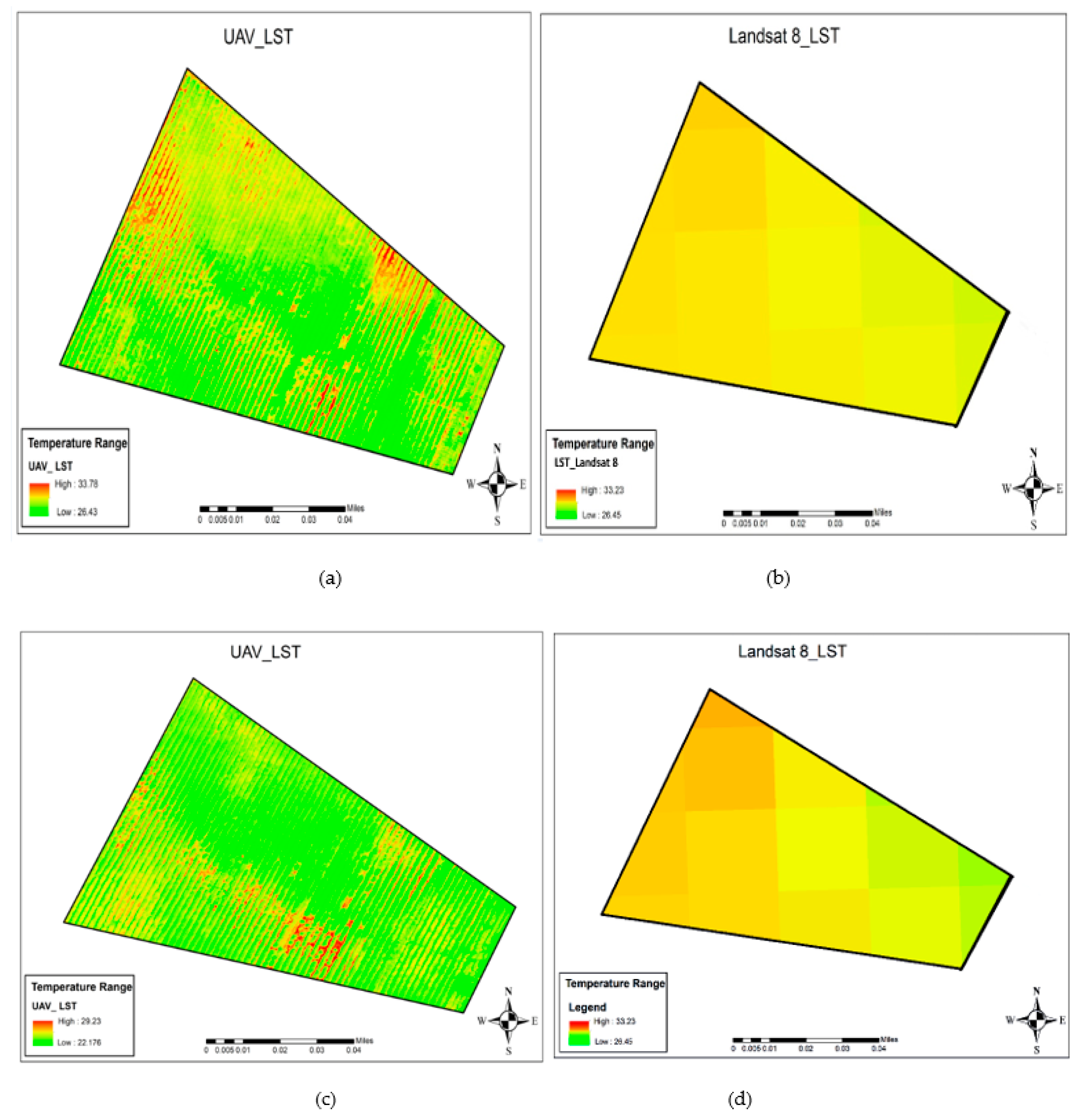
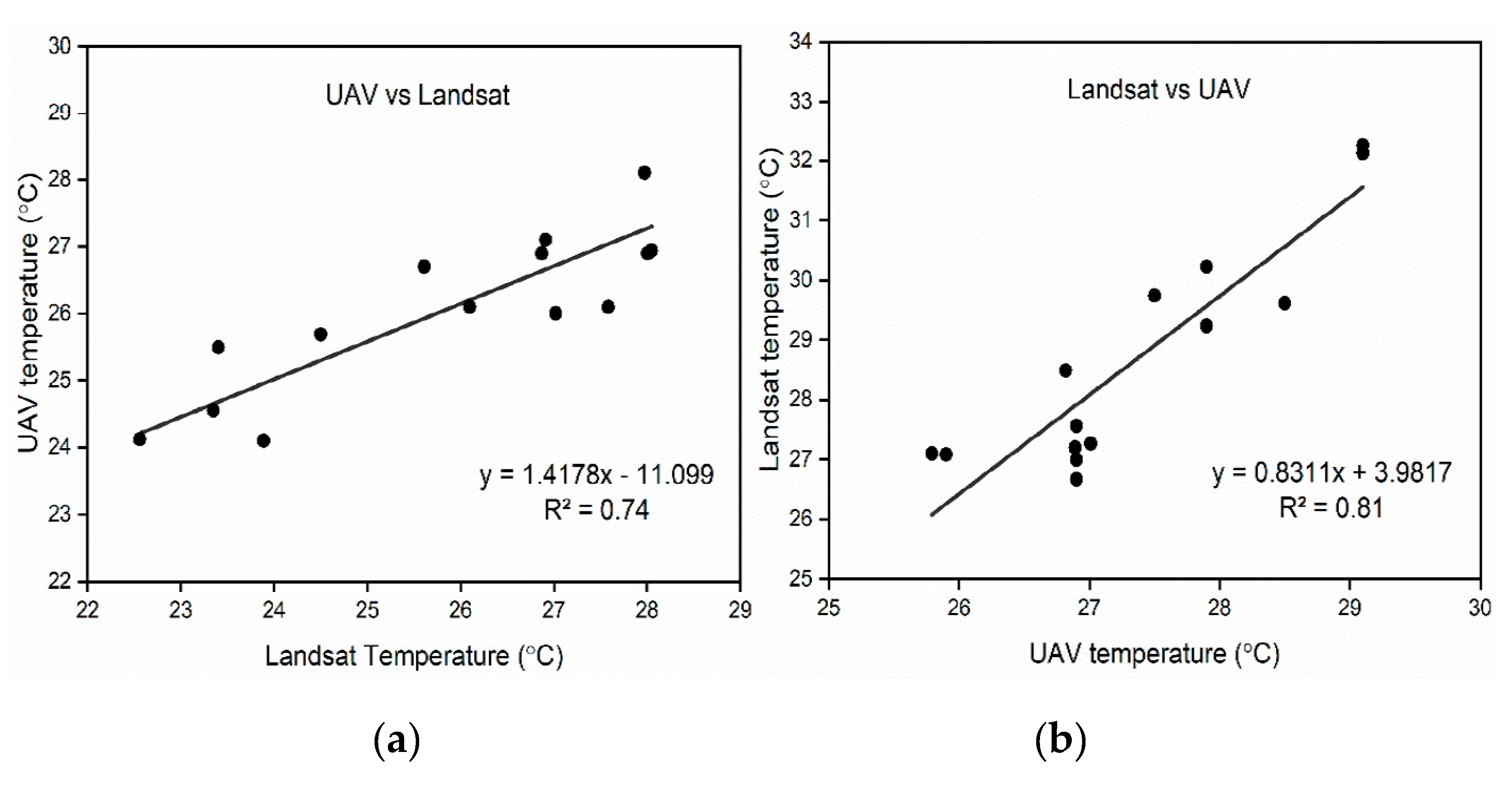
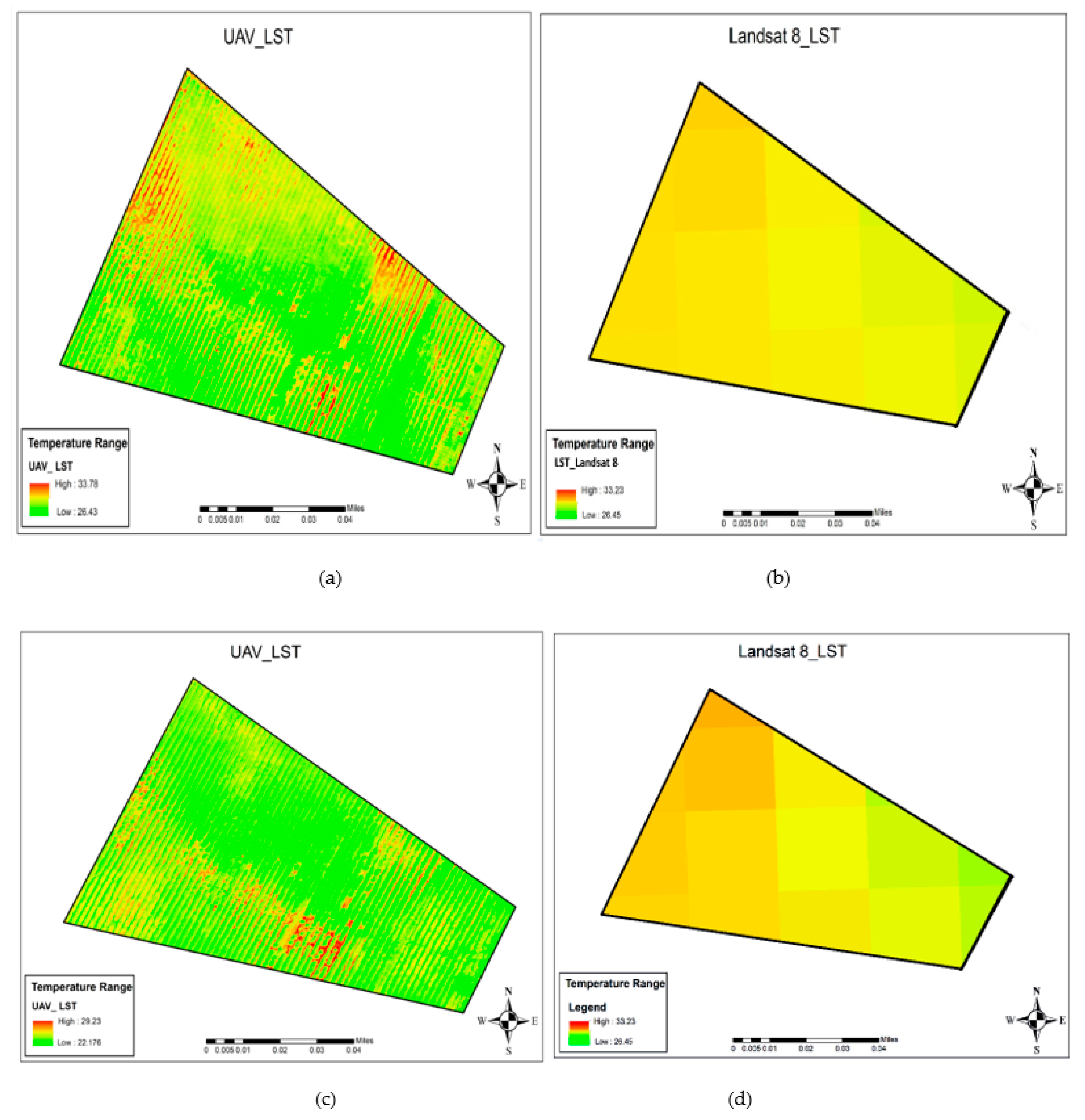
4.6. Landsat 8-UAV Data Retrieval Comparison
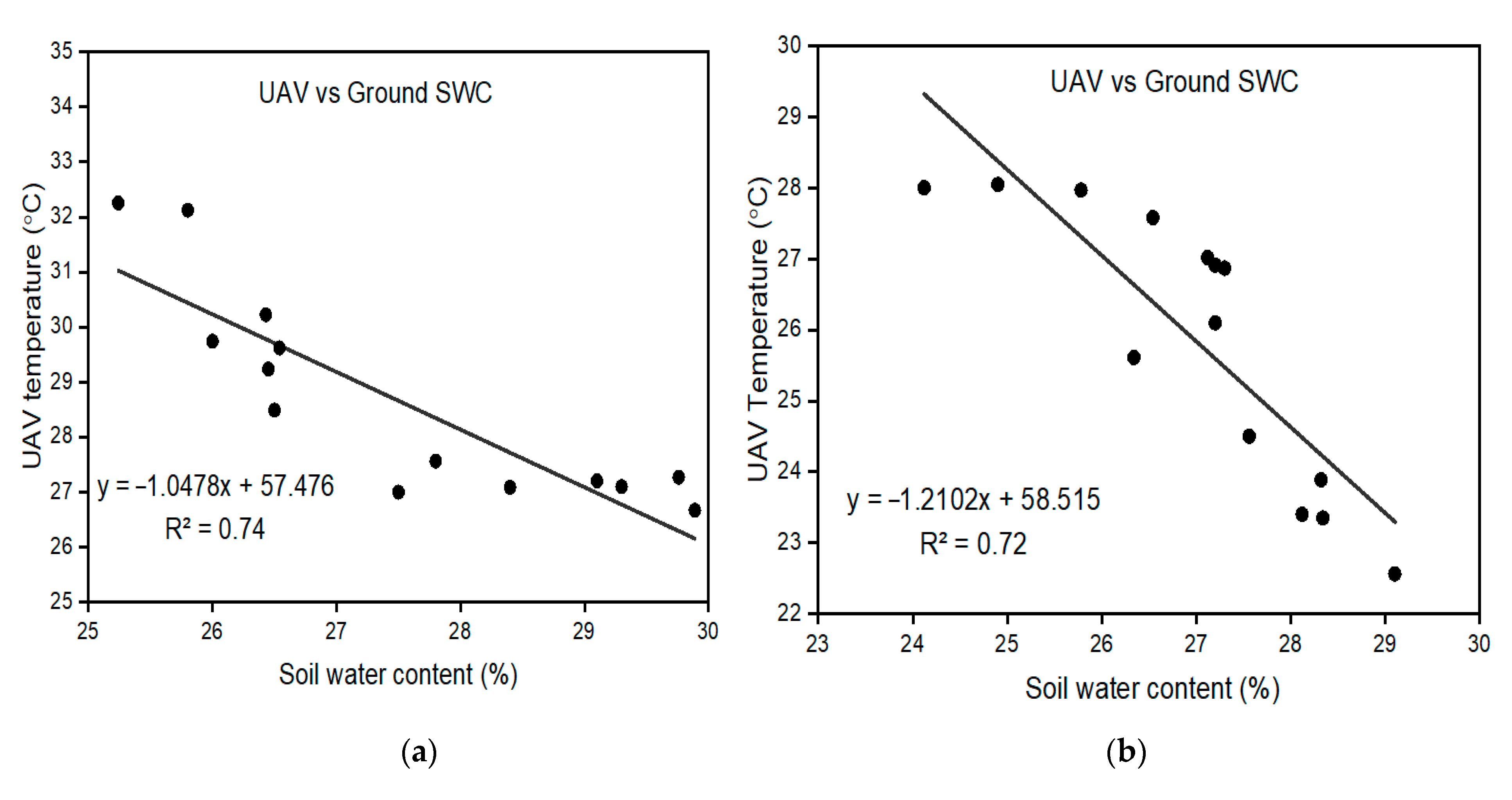
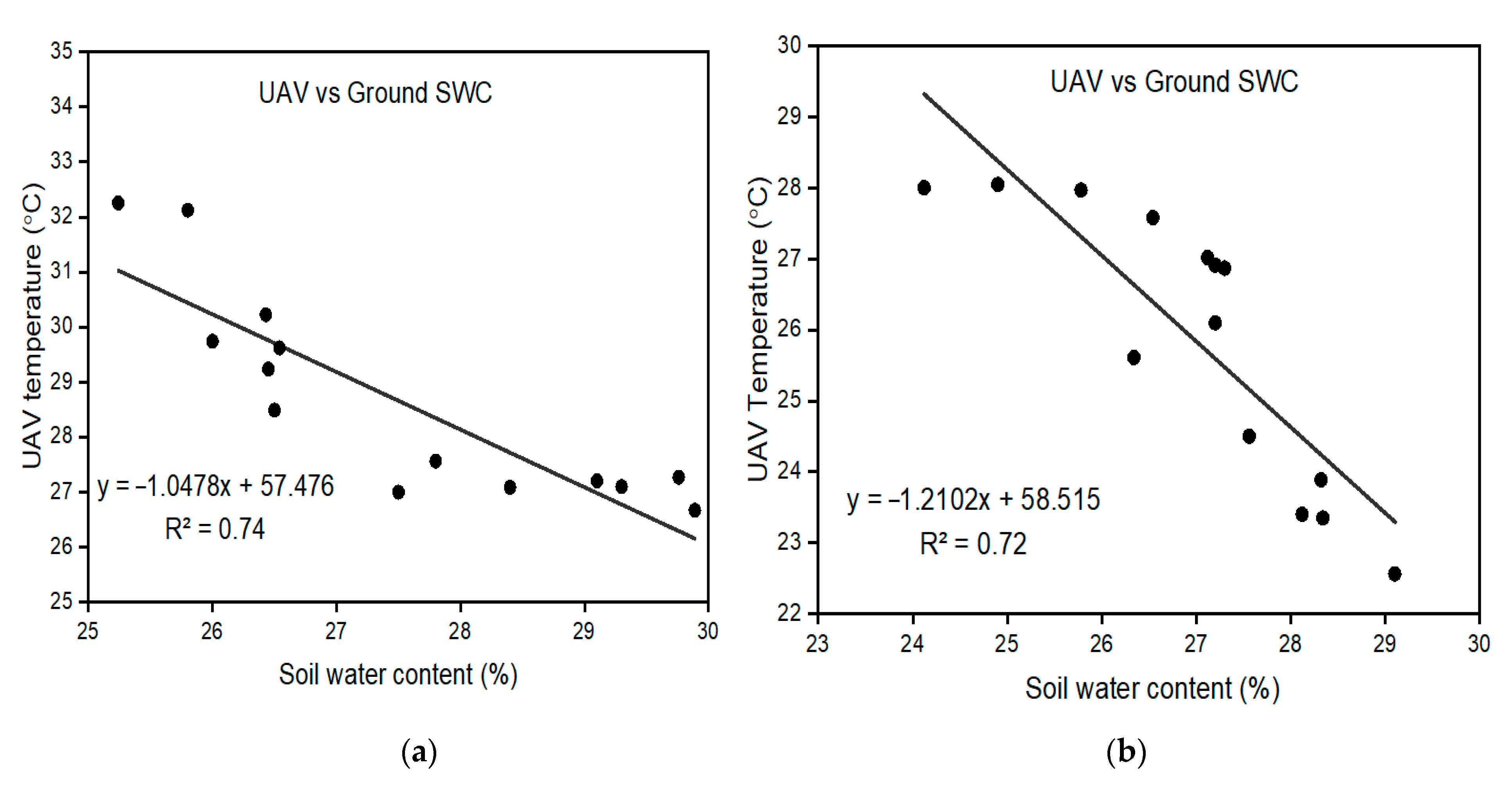
4.7. Relationship between UAV Retrieved LST and Soil Water Content
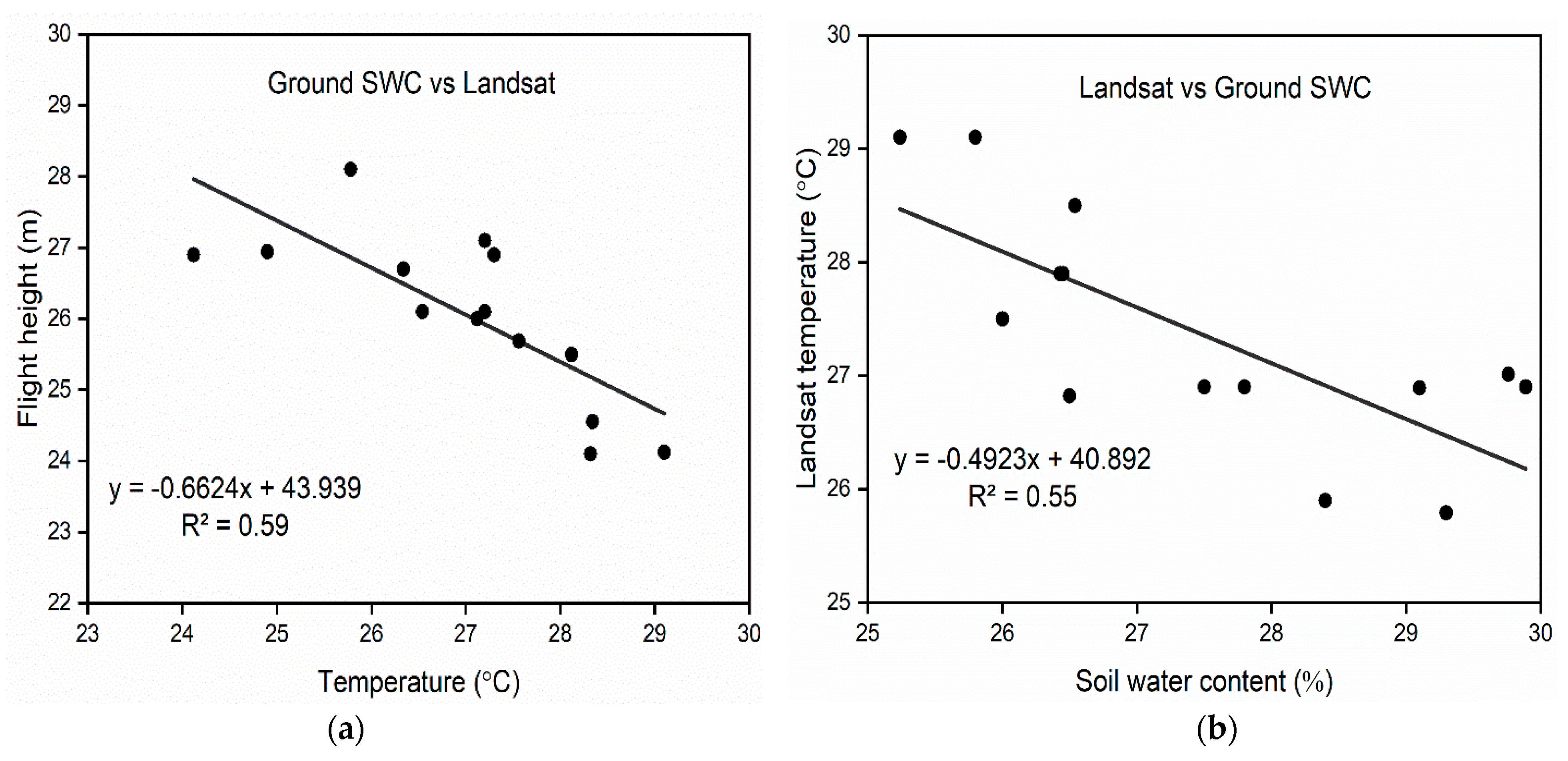
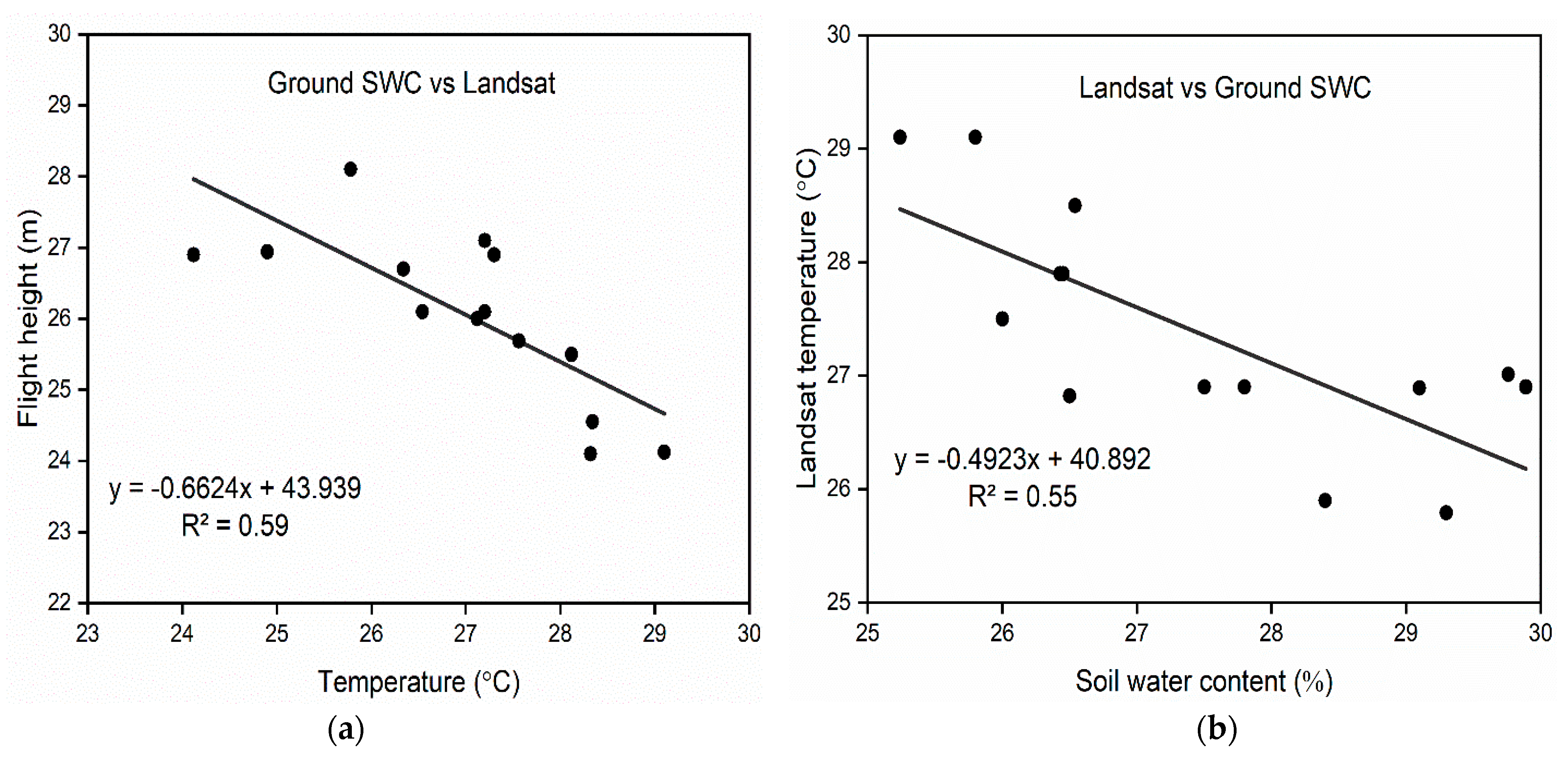
4.8. Relationship between Landsat 8 Acquired LST and Soil Water Content
4.9. Accuracy Assessment of the UAV LST and Landsat 8 LST
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sellers, P.; Schimel, D. Remote sensing of the land biosphere and biogeochemistry in the EOS era: Science priorities, methods and implementation—EOS land biosphere and biogeochemical cycles panels. Glob. Planet. Chang. 1993, 7, 279–297. [Google Scholar] [CrossRef]
- Song, K.; Zhou, X.; Fan, Y. Empirically Adopted IEM for Retrieval of Soil Moisture From Radar Backscattering Coefficients. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1662–1672. [Google Scholar] [CrossRef]
- Li, Z.-L.; Tang, B.-H.; Wu, H.; Ren, H.; Yan, G.; Wan, Z.; Trigo, I.F.; Sobrino, J.A. Satellite-derived land surface temperature: Current status and perspectives. Remote Sens. Environ. 2013, 131, 14–37. [Google Scholar] [CrossRef] [Green Version]
- Berni, J.A.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E.; Sensing, R. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef] [Green Version]
- Awais, M.; Li, W.; Cheema, M.J.M.; Zaman, Q.U.; Shaheen, A.; Aslam, B.; Zhu, W.; Ajmal, M.; Faheem, M.; Hussain, S.; et al. UAV-based remote sensing in plant stress imagine using high-resolution thermal sensor for digital agriculture practices: A meta-review. Int. J. Environ. Sci. Technol. 2022, 1–18. [Google Scholar] [CrossRef]
- Su, Z.B. A Surface Energy Balance System (SEBS) for estimation of turbulent heat fluxes from point to continental scale. In Proceedings of the Spectra Workshop, Noordwijk, The Netherlands, 12–13 June 2001; p. 23.1. [Google Scholar]
- Awais, M.; Li, W.; Cheema, M.J.M.; Hussain, S.; AlGarni, T.S.; Liu, C.; Ali, A. Remotely sensed identification of canopy characteristics using UAV-based imagery under unstable environmental conditions. Environ. Technol. Innov. 2021, 22, 101465. [Google Scholar] [CrossRef]
- Deilami, K.; Kamruzzaman, M.; Liu, Y. Urban heat island effect: A systematic review of spatio-temporal factors, data, methods, and mitigation measures. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 30–42. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.J.M.; Hussain, S.; Shaheen, A.; Aslam, B.; Liu, C.; Ali, A. Assessment of optimal flying height and timing using high-resolution unmanned aerial vehicle images in precision agriculture. Int. J. Environ. Sci. Technol. 2021, 1–18. [Google Scholar] [CrossRef]
- Becker, F.; Li, Z.-L. Towards a local split window method over land surfaces. Int. J. Remote Sens. 1990, 11, 369–393. [Google Scholar] [CrossRef]
- Notarnicola, C.; Angiulli, M.; Posa, F. Soil moisture retrieval from remotely sensed data: Neural network approach versus Bayesian method. IEEE Trans. Geosci. Remote Sens. 2008, 46, 547–557. [Google Scholar] [CrossRef]
- Zribi, M.; Andre, C.; Decharme, B. A Method for Soil Moisture Estimation in Western Africa Based on the ERS Scatterometer. IEEE Trans. Geosci. Remote Sens. 2008, 46, 438–448. [Google Scholar] [CrossRef]
- Moghaddam, M.; Rahmat-Samii, Y.; Rodriguez, E.; Entekhabi, D.; Hoffman, J.; Moller, D.; Pierce, L.E.; Saatchi, S.; Thomson, M. Microwave Observatory of Subcanopy and Subsurface (MOSS): A Mission Concept for Global Deep Soil Moisture Observations. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2630–2643. [Google Scholar] [CrossRef]
- Kuo, C.-H.; Moghaddam, M. Electromagnetic Scattering From Multilayer Rough Surfaces with Arbitrary Dielectric Profiles for Remote Sensing of Subsurface Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2007, 45, 349–366. [Google Scholar] [CrossRef]
- Dunne, S.C.; Entekhabi, D.; Njoku, E.G. Impact of multiresolution active and passive microwave measurements on soil moisture esti-mation using the ensemble Kalman smoother. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1016–1028. [Google Scholar] [CrossRef]
- Goward, S.N.; Xue, Y.; Czajkowski, K.P. Evaluating land surface moisture conditions from the remotely sensed temperature/vegetation index measurements: An exploration with the simplified simple biosphere model. Remote Sens. Environ. 2002, 79, 225–242. [Google Scholar] [CrossRef]
- Penuelas, J.; Filella, I.; Biel, C.; Serrano, L.; Savé, R. The reflectance at the 950–970 nm region as an indicator of plant water status. Int. J. Remote Sens. 1993, 14, 1887–1905. [Google Scholar] [CrossRef]
- Nemani, R.R.; Hashimoto, H.; Votava, P.; Melton, F.; Wang, W.; Michaelis, A.; Mutch, L.; Milesi, C.; Hiatt, S.; White, M.A. Monitoring and forecasting ecosystem dynamics using the Terrestrial Observation and Prediction System (TOPS). Remote Sens. Environ. 2009, 113, 1497–1509. [Google Scholar] [CrossRef]
- Webster, C.; Westoby, M.; Rutter, N.; Jonas, T. Three-dimensional thermal characterization of forest canopies using UAV photogrammetry. Remote Sens. Environ. 2018, 209, 835–847. [Google Scholar] [CrossRef] [Green Version]
- Han, D.; Wang, H.; Zheng, B.; Wang, F. Vegetation type classification and fractional vegetation coverage estimation for an open elm (Ulmus pumila) woodland ecosystem during a growing season based on an unmanned aerial vehicle platform coupled with decision tree algorithms. Acta Ecol. Sin. 2018, 38, 1–9. [Google Scholar]
- Song, Q.; Cui, X.; Zhang, Y.; Meng, B.; Gao, J.; Xiang, Y. Grassland fractional vegetation cover analysis using small UVAs and MODIS—A case study in Gannan Prefecture. Pratac. Sci. 2017, 34, 40–50. [Google Scholar]
- Kraaijenbrink, P.D.A.; Shea, J.M.; Litt, M.; Steiner, J.F.; Treichler, D.; Koch, I.; Immerzeel, W. Mapping Surface Temperatures on a Debris-Covered Glacier With an Unmanned Aerial Vehicle. Front. Earth Sci. 2018, 6, 64. [Google Scholar] [CrossRef] [Green Version]
- Gaitani, N.; Burud, I.; Thiis, T.; Santamouris, M. High-resolution spectral mapping of urban thermal properties with Unmanned Aerial Vehicles. Build. Environ. 2017, 121, 215–224. [Google Scholar] [CrossRef]
- Kang, D.-I.; Moon, H.-G.; Sung, S.-Y.; Cha, J.-G. Applicability of UAV in Urban Thermal Environment Analysis. J. Korean Inst. Landsc. Arch. 2018, 46, 52–61. [Google Scholar] [CrossRef] [Green Version]
- Jaganmohan, M.; Knapp, S.; Buchmann, C.; Schwarz, N. The Bigger, the Better? The Influence of Urban Green Space Design on Cooling Effects for Residential Areas. J. Environ. Qual. 2016, 45, 134–145. [Google Scholar] [CrossRef]
- Yang, C.; He, X.; Yu, L.; Yang, J.; Yan, F.; Bu, K.; Chang, L.; Zhang, S. The Cooling Effect of Urban Parks and Its Monthly Variations in a Snow Climate City. Remote Sens. 2017, 9, 1066. [Google Scholar] [CrossRef] [Green Version]
- USGS. LANDSAT 8 Surface Reflectance Code (LASRC) Product; USGS: Sioux Falls, SD, USA, 2016; p. 40. [Google Scholar]
- Roy, D.; Kovalskyy, V.; Zhang, H.; Vermote, E.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Jiménez-Muñoz, J.C.; Sobrino, J.A.; Skoković, D.; Mattar, C.; Cristóbal, J.J.I.G.; Letters, R.S. Land surface temperature retrieval methods from Landsat-8 thermal infrared sensor data. IEEE Trans. Geosci. Remote Sens. 2014, 11, 1840–1843. [Google Scholar] [CrossRef]
- Wang, F.; Qin, Z.; Song, C.; Tu, L.; Karnieli, A.; Zhao, S. An Improved Mono-Window Algorithm for Land Surface Temperature Retrieval from Landsat 8 Thermal Infrared Sensor Data. Remote Sens. 2015, 7, 4268–4289. [Google Scholar] [CrossRef] [Green Version]
- Sepúlveda-Reyes, D.; Ingram, B.; Bardeen, M.; Zúñiga, M.; Ortega-Farías, S.; Poblete-Echeverría, C. Selecting Canopy Zones and Thresholding Approaches to Assess Grapevine Water Status by Using Aerial and Ground-Based Thermal Imaging. Remote Sens. 2016, 8, 822. [Google Scholar] [CrossRef] [Green Version]
- Sun, S.; Zhang, J.; Meng, P.; Wang, G.; Huang, H.; Yin, C.; Wang, X. Establishment and application of prediction model of soil water in walnut orchard based on unmanned aerial vehicle thermal infrared imagery. Trans. Chin. Soc. Agric. Eng. 2018, 34, 89–95. [Google Scholar]
- Romeo, C.; Zinzi, M. Impact of a cool roof application on the energy and comfort performance in an existing non-residential building. A Sicilian case study. Energy Build. 2013, 67, 647–657. [Google Scholar] [CrossRef]
- Zinzi, M.; Agnoli, S. Cool and green roofs. An energy and comfort comparison between passive cooling and mitigation urban heat island techniques for residential buildings in the Mediterranean region. Energy Build. 2012, 55, 66–76. [Google Scholar] [CrossRef]
- Song, B.; Park, K. Verification of Accuracy of Unmanned Aerial Vehicle (UAV) Land Surface Temperature Images Using In-Situ Data. Remote. Sens. 2020, 12, 288. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, P.K.; Majumdar, T.J.; Bhattacharya, A.K. Surface temperature estimation in Singhbhum Shear Zone of India using Landsat-7 ETM+ thermal infrared data. Adv. Space Res. 2009, 43, 1563–1574. [Google Scholar] [CrossRef]
- Martínez-Fernández, J.; Ceballos, A. Temporal Stability of Soil Moisture in a Large-Field Experiment in Spain. Soil Sci. Soc. Am. J. 2003, 67, 1647–1656. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors Items | Notation | Units | Height (m) | Equipment, Type, and Manufactures |
|---|---|---|---|---|
| Soil water content (SWC) | θv | m3·m−3 | 0.04 (Depth) | CS655, Campbell Scientific Inc., Logan, UT, USA. |
| Soil temperature (ST) | Tsoil | °C | 0.02 and 0.06 (Depth) | TCAV-L, Campbell Scientific, Logan, UT, USA. |
| Air temperature | Ta | °C | 1.8 | Fine-wire thermocouple, COCO-002, Omega, Eng., Sittingbourne, Kent UK. |
| Liquid precipitation | - | m·m | 2.1 | TE525MM, Campbell Scientific Inc., Logan, UT, USA. |
| Wind velocity, Sonic temperature | u,v,w Ts | m·s−1 °C | 2.3 | CSAT3, Sonic anemometer, Campbell Scientific, Logan, UT, USA. |
| Relative humidity | RH | % | 2.1 | HC2S3-L, Campbell Scientific, Logan, UT, USA. |
| Net radiation | Rn | W·m−2 | 2.3 | CNR4-LKIPP and Zenon. |
| Item | Detailed Specification |
|---|---|
 DJI (M300 RTK) | Exposure mode: Auto, Manual Weight: 2.7 kg Flight time: 55 min Scale range: −400 to 1500 °C Frame rate: 30 Hz Pixel pitch: 12 µm ISO Range: Video: 100–25,600 Take-off weight: 9 kg |
 Zenmuse XT 2 FLIR | Digital Zoom: 1×, 2×, 4×, 8× Thermal sensitivity: ≤50 mk @ f 0.1 Spectral band: 8–14 µm Exposure Compensation: ±3.0 (1/3 increment) Lens: FOV:40.6.0 Resolution: 640 × 512 pixels Photo format: R-JPEG (16 bit) |
| Item | Detailed Specification |
|---|---|
 Landsat 8 Satellite | Weight: 2071 kg Temporal revisit: 16 days Band 10: TIRS 1 (10.6–11.19 µm) 100 m Band 11: TIRS 2 (11.5–12.51 µm) 100 m Length: 3 m Diameter: 2.4 m Equatorial crossing time: 10:00 a.m. +/−15 min |
 Landsat 8 sensor | Output format: Geo TIFF Pixel value: 16-bit pixel Accuracy: 41 m circular error, 90% confidence Orbit angle: Inclined 98.2° Spatial resolution: 100 m Accuracy: spatial resolution +/−1 percent |
| Temperature Range (°C) | a10 | b10 | R2 |
|---|---|---|---|
| 50–70 | −70.1775 | 0.4581 | 0.9997 |
| 30–50 | −62.7182 | 0.4339 | 0.9996 |
| −20–30 | −55.4276 | 0.4086 | 0.9996 |
| Statistical Model Name | Equation | Applications |
|---|---|---|
| Root-mean-squared error (RMSE) | The express error between UAV and satellite data | |
| Mean absolute error (MAE) | ||
| Relative Bias (RB) | Describe the extent of agreement between satellite and gauges | |
| Coefficient of correlation (CC) | ||
| Coefficient of determination (R2) |
| Experiment (230 DOY) | Experiment (245 DOY) | ||||||
|---|---|---|---|---|---|---|---|
| Tair (°C) | RH (%) | VPD (KPa) | Wind Speed (m/s) | Tair (°C) | RH (%) | VPD (KPa) | Wind Speed (m/s) |
| 16.8 | 64 | 0.78 | 0.5 | 24.5 | 67 | 1.04 | 0.4 |
| 26.6 | 57 | 1.59 | 1.7 | 29.5 | 61 | 2.45 | 0.9 |
| 36.5 | 52 | 3.90 | 1.9 | 34.4 | 57 | 3.85 | 1.5 |
| 36.5 | 50 | 2.98 | 1.8 | 35.9 | 53 | 2.90 | 1.8 |
| 37.2 | 46 | 2.10 | 1.8 | 34.6 | 48 | 2.45 | 1.7 |
| Comparison | DOY | R2 | RMSE | MAE | BIAS | CC |
|---|---|---|---|---|---|---|
| UAV vs. Ground | 230 | 0.89 | 1.07 | 0.82 | −0.49 | 0.94 |
| 245 | 0.90 | 0.70 | 0.57 | −0.13 | 0.95 |
| Comparison | DOY | R2 | RMSE | MAE | BIAS | CC |
|---|---|---|---|---|---|---|
| UAV vs. Ground | 230 | 0.70 | 0.78 | 0.62 | 0.08 | 0.83 |
| 245 | 0.73 | 0.94 | 0.81 | 1.11 | 0.85 |
| Comparison | DOY | R2 | RMSE | MAE | BIAS | CC |
|---|---|---|---|---|---|---|
| UAV vs. Landsat | 230 | 0.74 | 1.09 | 0.25 | 0.08 | 0.85 |
| 245 | 0.81 | 1.67 | 1.35 | 1.65 | 0.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Awais, M.; Li, W.; Hussain, S.; Cheema, M.J.M.; Li, W.; Song, R.; Liu, C. Comparative Evaluation of Land Surface Temperature Images from Unmanned Aerial Vehicle and Satellite Observation for Agricultural Areas Using In Situ Data. Agriculture 2022, 12, 184. https://doi.org/10.3390/agriculture12020184
Awais M, Li W, Hussain S, Cheema MJM, Li W, Song R, Liu C. Comparative Evaluation of Land Surface Temperature Images from Unmanned Aerial Vehicle and Satellite Observation for Agricultural Areas Using In Situ Data. Agriculture. 2022; 12(2):184. https://doi.org/10.3390/agriculture12020184
Chicago/Turabian StyleAwais, Muhammad, Wei Li, Sajjad Hussain, Muhammad Jehanzeb Masud Cheema, Weiguo Li, Rui Song, and Chenchen Liu. 2022. "Comparative Evaluation of Land Surface Temperature Images from Unmanned Aerial Vehicle and Satellite Observation for Agricultural Areas Using In Situ Data" Agriculture 12, no. 2: 184. https://doi.org/10.3390/agriculture12020184
APA StyleAwais, M., Li, W., Hussain, S., Cheema, M. J. M., Li, W., Song, R., & Liu, C. (2022). Comparative Evaluation of Land Surface Temperature Images from Unmanned Aerial Vehicle and Satellite Observation for Agricultural Areas Using In Situ Data. Agriculture, 12(2), 184. https://doi.org/10.3390/agriculture12020184