1. Introduction
Rice is a non-strict self-pollination crop. Generally, the success rate of rice pollination under natural conditions is only 0.2% to 5%. Supplementary pollination during rice’s flowering period is the key to the success of hybrid rice seed production. Rice spikelet flowering requires 28–30 °C and 70–80% relative humidity. Although the flowering period is 10–12 days, its flowering time each day is 1.5–2 h and the pollen life is only 4–5 min; therefore, effective detection of rice spikelet flowering is crucial for the timely determination of optimal pollination timing for hybrid rice seed production, so as to improve the pollen utilization rate and seed setting rate of the female parent of hybrid rice [
1].
Currently, the detection of rice spikelet flowering in hybrid rice seed production mainly relies on manual observation through farmers’ naked eyes [
2]; however, manual observation is not only time-consuming, laborious, and inaccurate, but also subjective and discontinuous, which makes it easy to miss the best pollination period. In large-scale hybrid rice seed production farms, it is even more important to obtain the rice spikelet’s flowering state by machine instead of a farmer [
3].
In recent years, experts and scholars have carried out a lot of research on the monitoring of plant flowering, most of which used camera [
4,
5,
6], multispectral technology [
7,
8] and hyperspectral technology [
9] to obtain flowering information and identify or evaluate the color, shape and appearance characteristics of flowers. Zhao et al. [
10] improved Flower Extraction Feature Pyramid Networks (FE-FPN) to extract the local regional features of a tomato bouquet. In addition, the local bouquet images with prioritized order were input into the improved Yolov3 network to realize the accurate identification of tomato flowers with an accuracy of 85.18%. Deng et al. [
11] identified and counted the number of citrus flowers based on case segmentation and used a camera to obtain an image of the citrus crown during the flowering period so as to identify and segment the flowers. The experimental results show that the proposed method is superior to the unoptimized MaskR-CNN network in both accuracy improvement and training efficiency. Wang et al. [
12] proposed a new algorithm DeepPhenology based on CNN and RGB images to estimate the phenological distribution of apple flowers. The comparison between the algorithm results and the YOLOv5 model further evaluated the performance of the model in this task, and the results showed that the model was superior to the most advanced target detection model. Cai et al. [
13] applied three deep neural networks, RetinaNet, YOLOv5 and FtP-RCNN, to extract the spike number of sorghum and found that YOLOv5 indicated the best counting accuracy in estimation of the flowering time of sorghum.
All of these studies use machine learning to identify crop or fruit flowering, but few studies have been reported on flowering rice identification, and only a few studies have applied deep learning techniques to flowering rice status detection. During the process of rice flowering, the content of its biochemical components changes, which makes the spectral reflectance of the rice spikelet change. The spectral data collected by hyperspectral technology are continuous in wavelength and carry a lot of effective information. Hyperspectral data are extremely sensitive to the perception of subtle changes occurring in the target detectors, which is also an advantage of using hyperspectral technology to detect the flowering state of rice spikelets compared with other devices such as visible light cameras or multispectral cameras. This study combines hyperspectral and machine learning techniques to detect the spikelet flowering information of rice for a large-scale hybrid rice seed production farm. Hyperspectral data of flowering and non-flowering rice spikelets were collected for analysis. Three machine learning methods (RF, SVM and BP neural network) and CNN were used to establish the binary classification detection model of the rice flowering state. PCA feature extraction, GA feature selection and PCA and GA combination algorithm were used to reduce the dimensionality of hyperspectral data, and the characteristic bands that could be used for rice spikelet flowering detection were determined. In this study, computer qualitative analysis of rice flowering was used instead of manual qualitative observation to provide technical reference for accurate judgment of rice flowering and help to determine the optimal operation time for supplementary pollination of hybrid rice.
2. Materials and Methods
2.1. Data Acquisition and Preprocessing
2.1.1. Experiment Site
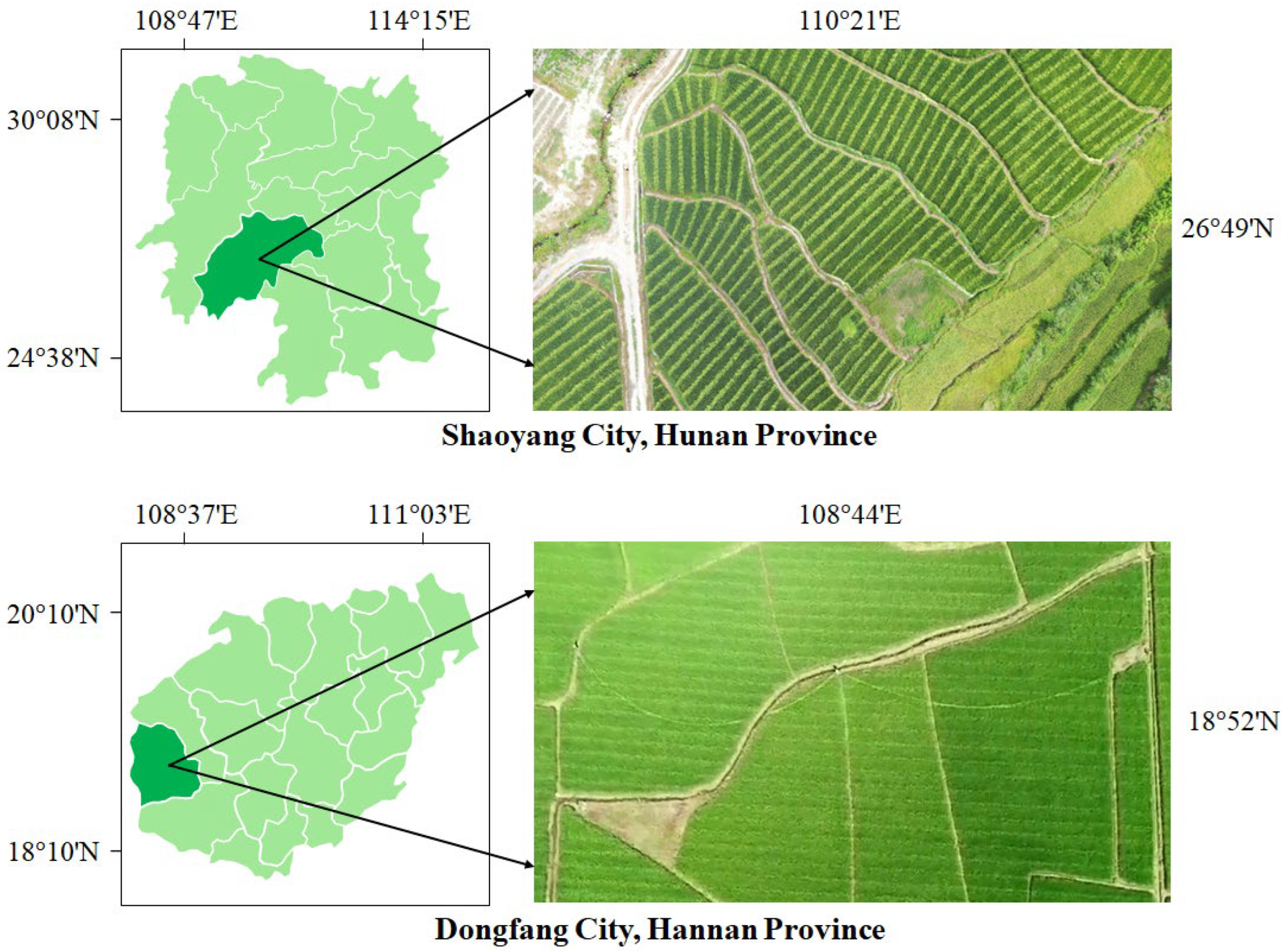
The rice flowering data were obtained in two sites (
Figure 1). The first batch of sample data was collected from Hybrid Rice Breeding Base in Dongfang, Hainan Province. The second batch of data was collected from Longping Hi-tech Breeding Base in Shaoyang, Hunan Province. It was sunny and cloudless when collecting data. The temperature was between 28 °C and 31 °C. The above meteorological data were collected from a Kestrel NK5000 series handheld meteorological monitoring instrument (Nielsen-Kellerman, Boothwyn, PA, USA).
The rice in two experimental sites was cultivated by manual transplanting. Experiments were carried out during the jointing and flowering stages of rice. The male parent was planted 24 days earlier than the female parent, and the planting ratio is 2:10 between male and female plants. The male plants will be cut off early after the flowering period, which provides sufficient sunlight and nutrients to the female plants and reduces pests and disease occurrence.
2.1.2. Data Acquisition
Rice flowering information was acquired with an ASD FieldSpec® HandHeld™ 2 spectrometer (Malvern Panalytical Ltd., Malvern, UK), which was equipped with a unique spectral acquisition instrument capable of rapid the nondestructive acquisition of spectra in the wavelength range of 325–107 nm. When measuring the hyperspectral data of the rice spikelet, it is necessary to ensure the normal operation of the handheld spectroscopic radiation spectrum so that it can accurately reflect the spectral reflection information of the rice spikelet. After the instrument startup system is loaded, the standard whiteboard with 100% reflectivity is collected for black-and-white calibration. For each data acquisition, 5 groups of hyperspectral data were collected simultaneously by a handheld spectroradiometer to reduce systematic random errors.
It is necessary to ensure that the data are collected under high light intensity and cloudless weather as far as possible to avoid the influence of external factors such as light intensity on the experimental data. In the case of cloud cover, it is necessary to wait for the cloud to disperse before continuing to collect, and at the same time, it is necessary to conduct whiteboard calibration again to ensure the accuracy of spectral data collection. In addition, when the instrument is used for collection work for a long time, even if there is no influence of external environmental factors, the whiteboard calibration needs to be carried out every 5 min to reduce the error caused by the heat generated by the instrument that occurs over long periods.
In order to ensure that the measurement is the characterization region of the rice spike, the probe of the handheld spectral radiation spectrum was put directly facing the middle of the rice spike during measurement to ensure that the rice spike is within the coverage range of the radiation spectrometer. At the same time, the instrument and the rice spike to be measured were kept a fixed distance (
Figure 2).
In the Hybrid Rice Breeding Base in Dongfang, Hainan Province, 1236 hyperspectral data of rice spikelets were collected, and 1115 effective spectral data were kept for analysis after removing obvious abnormal data, with a wavelength range of 325–1075 nm. In Longping Hi-tech Breeding Base in Shaoyang, Hunan Province, 4036 hyperspectral data of spikelet were collected, and 3000 effective spectral data were obtained after removing obvious abnormal data, with a wavelength range of 325–1075 nm. The experimental data were collected in chronological order. Spectral data of the panicle region were first collected before the flowering of the male parent of hybrid rice and then during flowering time.
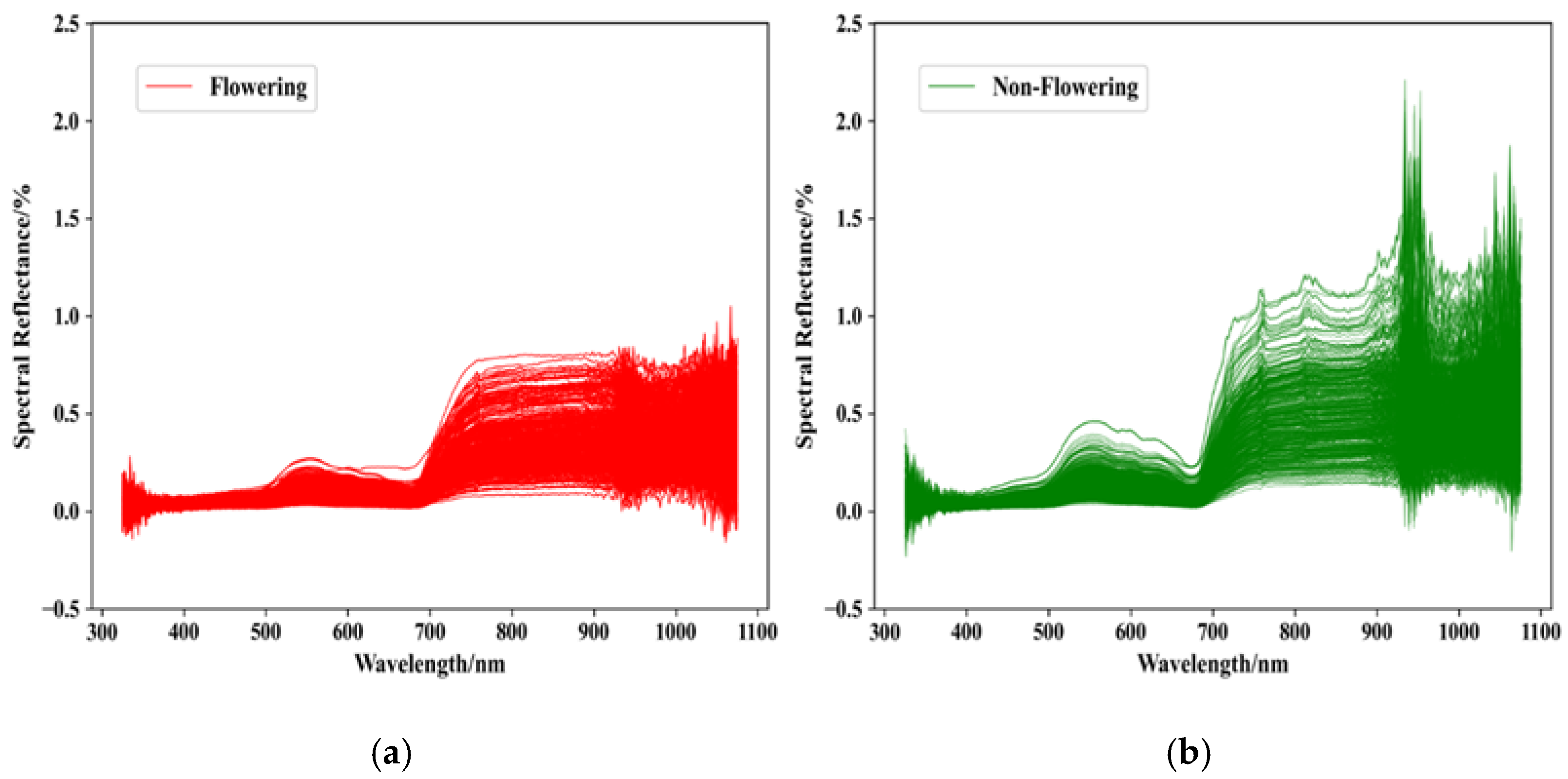
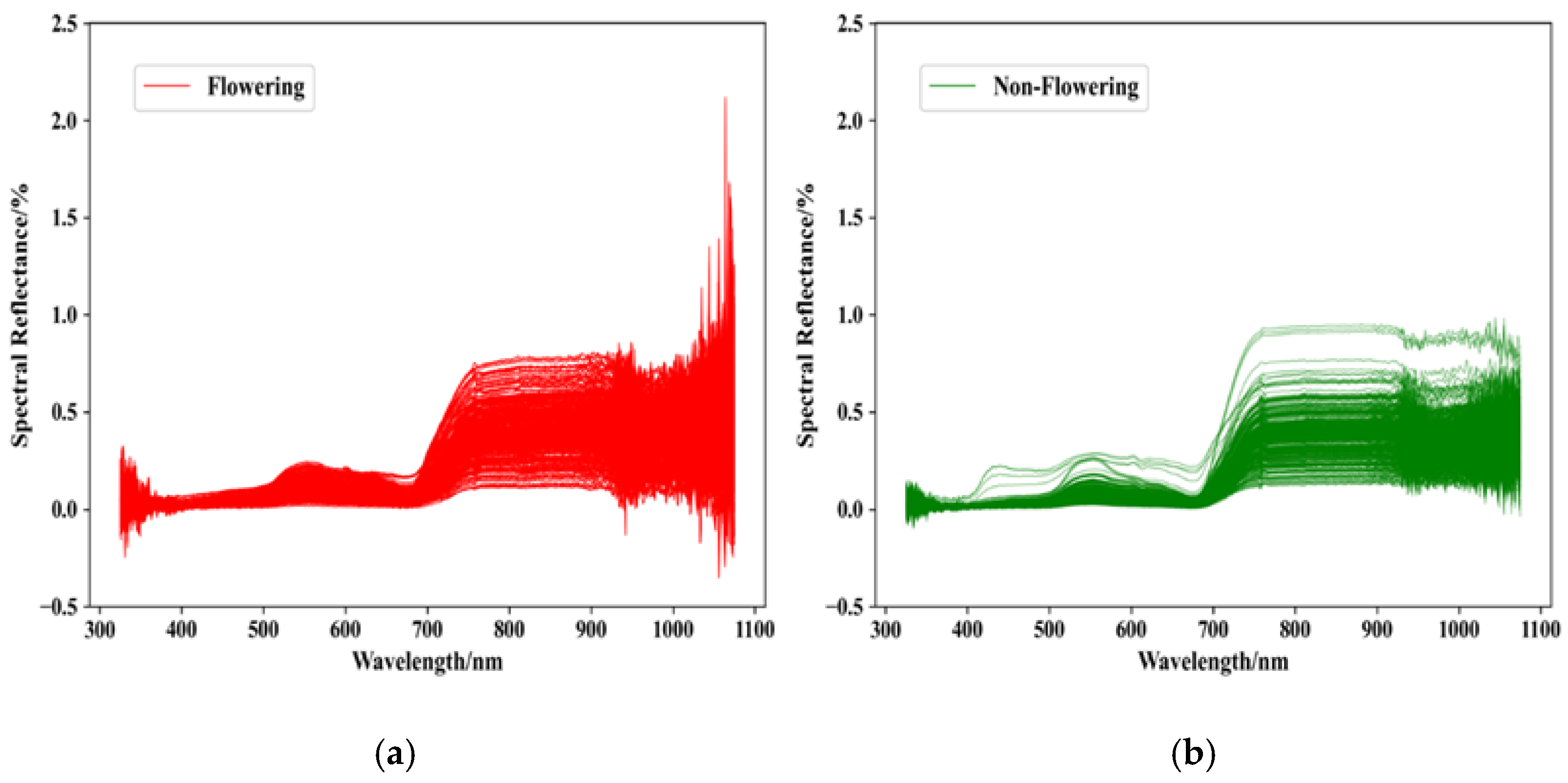
Training and test data sets were divided based on a ratio of 4:1, as shown in
Table 1. The relationship between spikelet reflectance and wavelength of rice before and after flowering is shown in
Figure 3 (Hunan Province) and
Figure 4 (Hainan Province). As can be seen from
Figure 3a and
Figure 4a, there is a large degree of overlap between spectral data of flowering and non-flowering rice, which is difficult to distinguish from artificial observation.
2.1.3. Data Preprocessing
Considering that weather fluctuation affects data accuracy, multiple pretreatments were carried out for collected hyperspectral data. Hyperspectral data of rice spikelets were preprocessed simply by using ViewSpecPro, the supporting software of the spectrometer.
Mean calculation: During data acquisition, the ASD FieldSpec®® HandHeld™ 2 spectrometer was set to repeatedly sample five hyperspectral curves, thus reducing the inherent error of the original spectral data; therefore, in the data preprocessing step, the collected sample data were averaged first.
Spectral reflectance calculation: The spectral reflectance of the target can be calculated through Equation (1).
where
on the left and right sides of the equation, respectively, represents the target spectral reflectance and the target light intensity value; the lower
represents the whiteboard light intensity value of the spectrometer and the other
represents the whiteboard reflectance.
After simple preprocessing, a total of 3000 hyperspectral data of rice spikelets were obtained, including 1500 non-flowering and 1500 in full bloom. Each set of data has relative independence.
2.2. Classification Model for Detection of Rice Spikelets Flowering
Three traditional machine learning models, Random Forest (RF), Support Vector Machine (SVM), and Back Propagation (BP) neural network, as well as Convolutional Neural Network (CNN), were used to classify rice flowering using full-band spectral data. The generalization ability and deficiency of different classifiers in rice spikelet flowering detection were compared to investigate the suitable algorithm. Hyperparameters were selected using a grid search (for a given hyperparameter, set the start value, end value and interval) to test their performance on the training set and thus find the best parameter. We tested the accuracy of the model with different model hyperparameters. In RF, for the number of subtrees, the accuracy of the model between 10 and 400 was tested with 10 as the interval; for the maximum decision tree depth, the accuracy of the model from 2 to 20 was tested with 1. As in SVM, the penalty parameter C was tested for the accuracy of the SVM between [2−5, 2−4, …, 29, 210]. As in BP networks, the accuracy of the model with the number of hidden layers between [5, 10, …, 180] was tested. The CNN algorithm has a convolutional kernel size of 3 × 3 and a step size of 2.
2.2.1. RF Algorithm
RF algorithm is widely applied to solve classification and regression type problems in many fields [
14,
15,
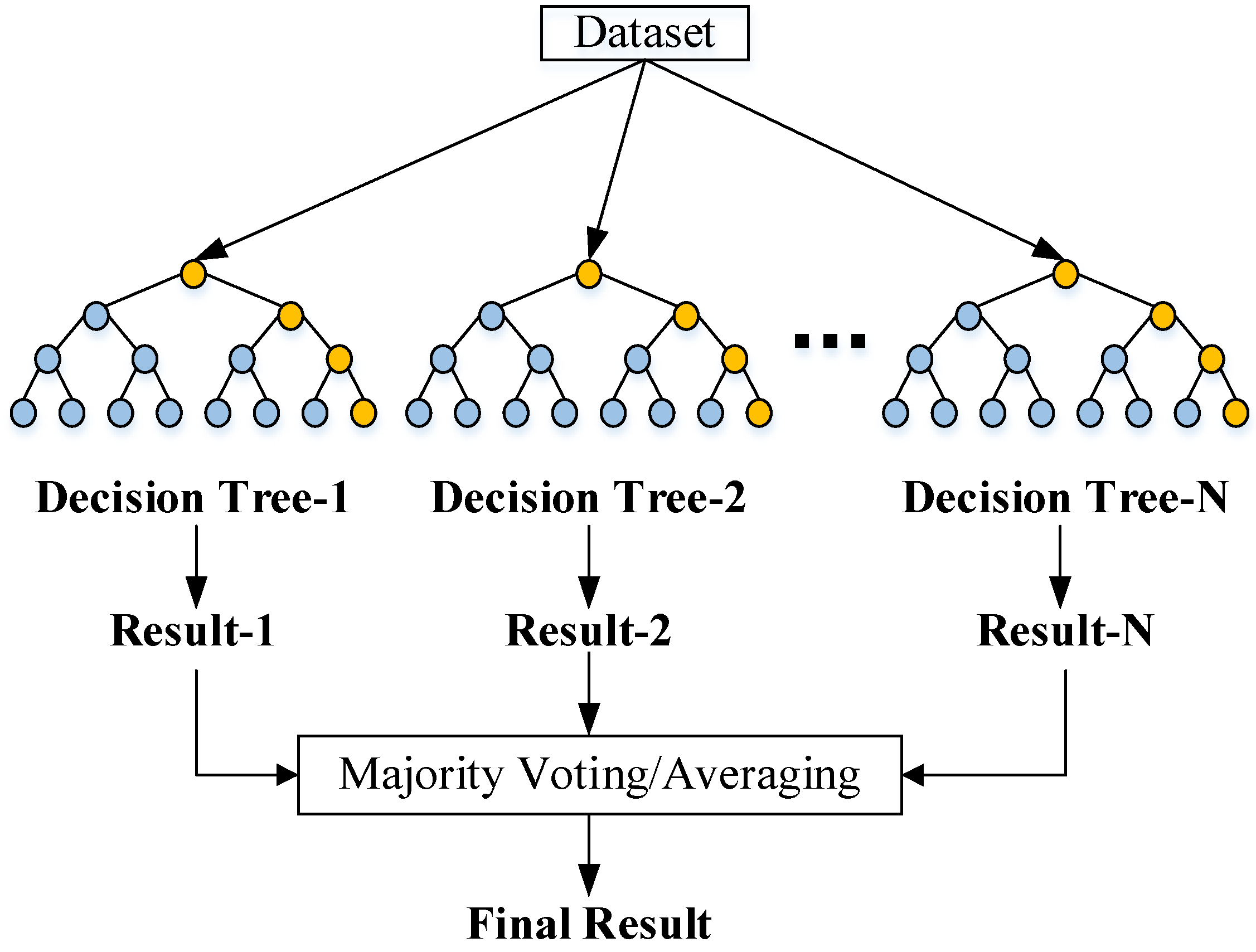
16]. The algorithm adopts the ensemble learning method. By establishing a random forest (i.e., multiple classifiers), also known as a random forest decision tree, each decision tree in the random forest (i.e., each classifier) classifies the input data and then carries out the voting statistics to obtain the overall classification result.
The construction rules of the random forest [
17] are as follows: (1) Defining the training sample set N: For each decision tree in the random forest, draw N training samples from the sample set in a releasing manner and arbitrarily, and define it as the training set of the decision tree; (2) assuming that N is the feature dimension of each sample, take a constant value n that is much smaller than N, select any subset of n features from N, and extract the optimal term from the n features obtained whenever the decision tree is split; (3) any decision tree in a random forest needs to grow to the maximum extent allowed by the conditions and has not undergone pruning operations during its growth and division. The algorithm flow chart is shown in
Figure 5.
RF algorithm uses an integrated algorithm, which is easy to make into a parallelized method because each tree can be generated independently and simultaneously, and the random forest does not easily fall into overfitting; however, when the number of decision trees in the random forest is large, the time and space complexity of model training will be relatively high.
2.2.2. SVM Algorithm
The basic idea of the SVM algorithm is to map data to a high-dimensional feature space through nonlinear mapping and finally build an optimal classification hyperplane in the high-dimensional feature space so as to separate the nonlinear data. It can not only use a relatively simple algorithm to determine key sample feature data but also has good robustness [
18].
SVM algorithm has two main principle features. SVM is targeted at linearly separable cases. When dealing with linearly indivisible cases, nonlinear features need to be transformed into linearly separable features. In this case, the low-dimensional input space linearly indivisible samples are converted into high-dimensional feature space by a nonlinear mapping algorithm and then analyzed by a linear algorithm. Based on the theory of minimum structural risk, SVM constructs the optimal classification plane in the feature space to obtain the global optimal solution for the learner. Another point is based on the principle of SVM, where a small number of support vectors determine the final classification decision result.
2.2.3. BP Neural Network
BP neural network [
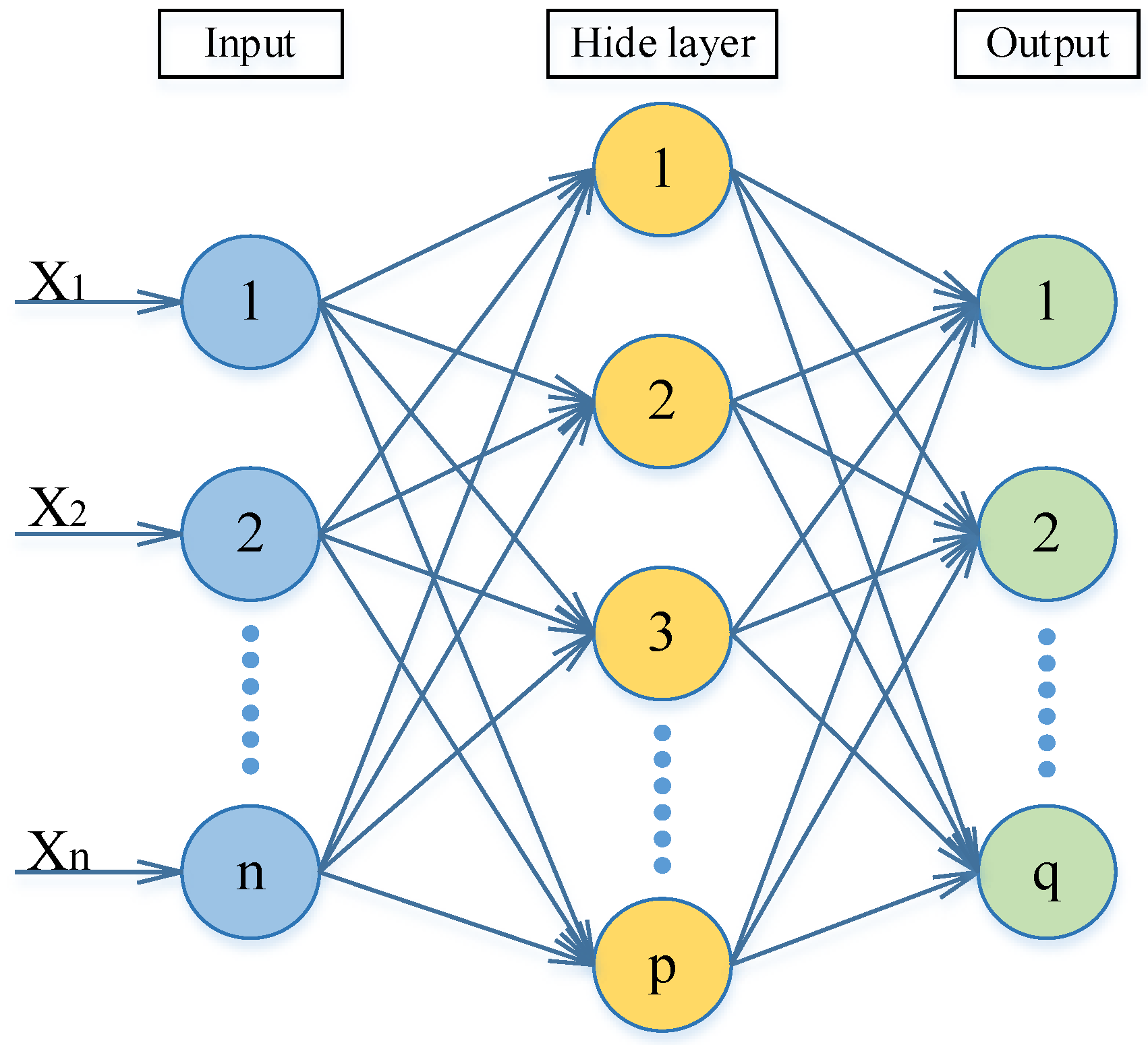
19] is a concept of multi-level feedforward neural network trained according to the backward error propagation algorithm. It is a widely used traditional neural network model. Its training method is an error back propagation algorithm, through which the weight and threshold of the neural network are constantly adjusted and modified to obtain the minimum mean square error value, and finally results in the optimal fitting degree of the data. Its network model topology is composed of three parts: input layer, hide layer and output layer.
Figure 6 gives a brief demonstration on the flow chart of BP neural network, where X
1, X
2, X
n represent the input hyperspectral reflectance consisting of 751 channels. BP neural network algorithm consists of two parts: signal forward conduction and error result reverse conduction.
The function of the input layer of the BP neural network is to transmit the input information received from the outside to the middle layer, and each neuron in the middle layer transforms the input information. According to the demand for information transformation processing ability to design a single hidden layer structure or more hidden layer structure, then through the last hidden layer, the processed information is transmitted to the output layer for subsequent processing. Finally, the output layer of the neural network will output the information processing results obtained in the neural network algorithm. At this point, if there is a difference between the actual output value and the expected output value, the error will enter the reverse conduction stage. The weight will be modified and adjusted in all layers of the neural network according to the gradient descent method, and the error will be reverse transmitted through the output layer to the middle layer and then to the input layer. The training process of a neural network that is constantly repeating information forward conduction and error reverse conduction of weights within every level continuously in the process of adjustment. The training process continues until the error of the neural network output achieves an acceptable level or is set in advance of the neural network to build learning.
2.2.4. CNN Algorithm
CNN is one of the representative algorithms of deep learning. It is a type of feedforward neural network with a deep structure, including convolution computation. The CNN algorithm has been widely used in various fields of classification, retrieval, identification (classification and regression), segmentation, feature extraction, key point positioning (posture recognition) and other scenes [
20]. The structure of CNN is usually composed of an input layer, convolutional layer, pooling layer, fully connected layer and output layer.
Figure 7 shows the classical structure of the CNN algorithm.
The input layer of the CNN inputs the target detection sample into the CNN structure. When the sample data are fed into the input layer, the computer treats the input as a matrix and performs a series of transformations on the matrix before feeding it into the next layer of the structure. The convolutional layer is a unique structure of the CNN algorithm model and a core layer of the whole neural network, which produces most of the computational work. The structure used by the combination of the convolutional layer and the pooling layer can be set repeatedly in the hidden layer. The function of the convolution layer is to deepen the original matrix, and the nodes processed by the convolution layer will obtain a deeper matrix. The pooling layer extracts the main information of the samples based on the principle of local connectivity of the features in order to reduce the amount of data processing. It does not change the depth of the 3D matrix, but the size of the matrix is reduced, thus reducing the parameters in the whole neural network and the number of training dimensions. The fully connected layer is a structure that weighs all the neurons between the two layers, and the last output layer serves as the target result. These two parts are generally configured at the end of the CNN model. CNN uses original samples as input, which can effectively learn corresponding features from a large number of samples and avoid a complex feature extraction process. CNN algorithm can also be used for the classification of 1D data by varying the size of the convolutional kernel.
2.3. Data Dimensionality Reduction Algorithm
Although hyperspectral data receive high classification accuracy under the above four classification models, the original data have a high dimension and a slow operation rate; therefore, dimensionality reduction was performed to improve the running speed and accuracy of the model. Two commonly used dimensionality reduction methods were selected in this study. Rice flowering detection was then conducted on the basis of feature dimensionality reduction in order to obtain better results.
2.3.1. Principal Component Analysis
Principal Component Analysis (PCA) [
21] is the most widely used data dimensionality reduction algorithm. The main idea of the PCA algorithm is to map n-dimensional features to k-dimensional features. These new orthogonal features, also called principal components, are reconstructed from the original n-dimensional features. The job of PCA is to find a set of mutually orthogonal axes in turn from the original space, and the choice of new axes is closely related to the data itself. The first new axis is selected in the direction of the greatest difference in the original data. The second axis is selected in a plane orthogonal to the first axis to maximize the variance. The third axis is selected in a plane orthogonal to the first and second axes to maximize the variance. By analogy, n such axes are obtained. The new axis obtained in this way contains most of the variance of the first k axes, and the variance of the last axis is almost zero. This is equivalent to reducing the dimensionality of the data features by retaining only the dimensional features that contain most of the variance and ignoring the dimensional features that contain almost zero variance.
By calculating the covariance matrix of the data matrix and then obtaining the eigenvalue and eigenvectors of the covariance matrix, the matrix consisting of the eigenvectors corresponding to the k features with the largest eigenvalue (i.e., the largest variance) is then selected. The data matrix is transformed into a new space to achieve dimensionality reduction in data features. At present, there are mainly two methods to obtain the eigenvalue and eigenvector of covariance matrix: the PCA algorithm based on eigenvalue decomposition covariance matrix and the PCA algorithm based on the SVD decomposition covariance matrix.
2.3.2. Genetic Algorithm
A Genetic Algorithm (GA) is a computational model that simulates the biological evolution process of natural selection and genetic mechanism in Darwin’s biological evolution theory. It is a method to find out the optimal solution by simulating the natural evolution process. When solving complex combinatorial optimization problems, it usually obtains better optimization results faster than some traditional optimization algorithms. GA has been widely used in combinatorial optimization [
22], machine learning [
23], signal processing [
24], adaptive control [
25] and artificial life.
GA starts with a population that represents a set of possible solutions to a problem. A population consists of a certain number of genetically coded individuals. Each individual is actually a chromosomal entity with characteristics. After the initial population is generated, according to the principle of survival of the fittest, it evolves generation by generation to produce better and better approximate solutions. In each generation, individuals are selected according to their fitness in the problem domain, and combined crossover and mutation are performed with the help of natural genetic operators to generate a population representing a new set of solutions. This process will produce a metapopulation similar to natural evolution, which is more adaptable than its predecessors, and the best individuals in the previous generation are decoded and can be used as approximate optimal solutions to the problem.
2.4. Evaluation of Algorithm Accuracy
The prediction results of the model for rice flowering detection were as follows: TP (true positive): positive samples were correctly predicted as positive samples, i.e., the data of spikelet flowering were predicted as flowering. FP (false positive): a negative sample is incorrectly predicted as a positive sample, i.e., a non-flowering spikelet is predicted as flowering. TN (true negative): negative samples were correctly predicted as negative samples, i.e., non-flowering data were predicted as non-flowering. FN (false negative): positive samples were wrongly predicted as negative samples, i.e., the data on flowering of spikelets were predicted as non-flowering.
The evaluation indexes are precision (the proportion of the total number of rice spikelets flowering that can be correctly detected) and recall (the proportion of correctly predicted rice spikelets flowering in total actual flowering), which can be calculated by Equations (2) and (3), respectively.
4. Discussion
This study innovatively proposed the application of hyperspectral technology to detect the flowering state of rice spikelets and made full use of the advantages of hyperspectral technology to obtain better detection results. Compared with artificially judging the flowering state of rice spikelets, the detection method combining hyperspectral technology and machine learning is faster and more accurate. In the future, the results obtained in this study can be made into hyperspectral sensors, which can realize remote flowering detection, which greatly saves labor costs.
Zhang et al. [
26] obtained rice spikelet images from a visible light camera. Series Otsu (SOtsu) was applied in tandem to extract the spikelet anthers through the visible light blue channel. In the meantime, deep learning models, such as FasterRCNN and YOLO-v3, were used to identify the spikelet anthers and the opening spikelet hull. The most suitable method was selected for flowering characteristics detection to compare the precision, recall and the F1 coefficient of different models. Results showed that the precision, recall rate, F1 coefficient and Pearson correlation coefficient of the FasterRCNN model in spikelet hull detection were 1, 0.97, 0.98 and 0.993, respectively, while those of SOtsu in spikelet anthers detection were 0.92, 0.93, 0.93 and 0.936, respectively. It inferred that the SOtsu and FasterRCNN models were both capable of rice flowering detection, but the opening spikelet hull was more suitable than the spikelet anthers for the rice flowering features detection with the deep learning model; however, compared with the detection method with a visible light camera, the hyperspectral data collected in this study carries more effective information and is easier to process. The hyperspectral data can clearly perceive the changes in spectral reflectance caused by the subtle changes in the flowering process of rice glumes. In addition, the application of machine learning algorithms to build classification models can make full use of the spectral information carried by the hyperspectrum, making the predictive ability of the models more powerful compared to the application of other detection methods.
Due to the overlapping signature and negligible difference between flowering and non-flowering spectra for both Hainan and Hunan locations, we used full-band reflectance data for modeling. In addition, the result of data dimensionality reduction through the GA algorithm shows that it contributes to the detection of rice flowering status in almost the whole waveband range, and the contribution values do not differ significantly.
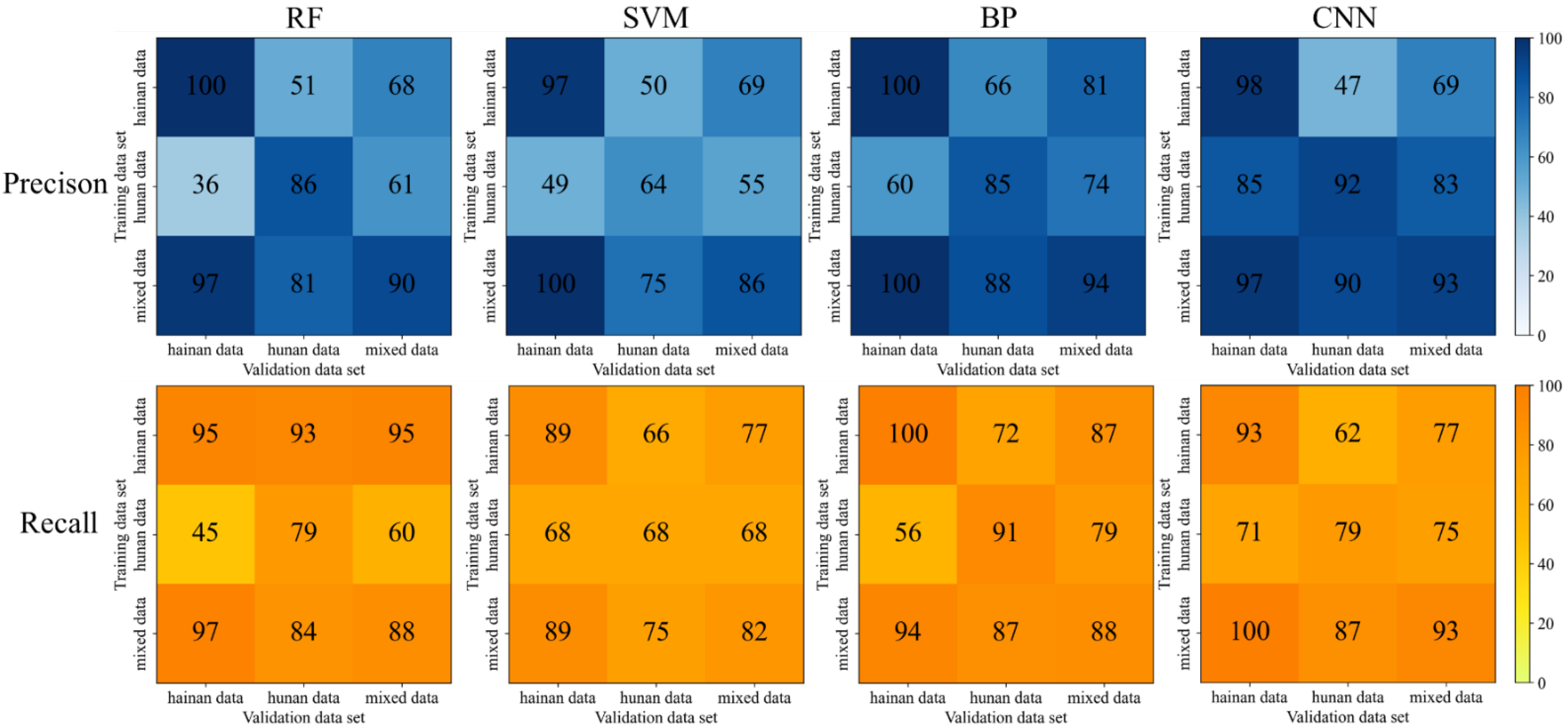
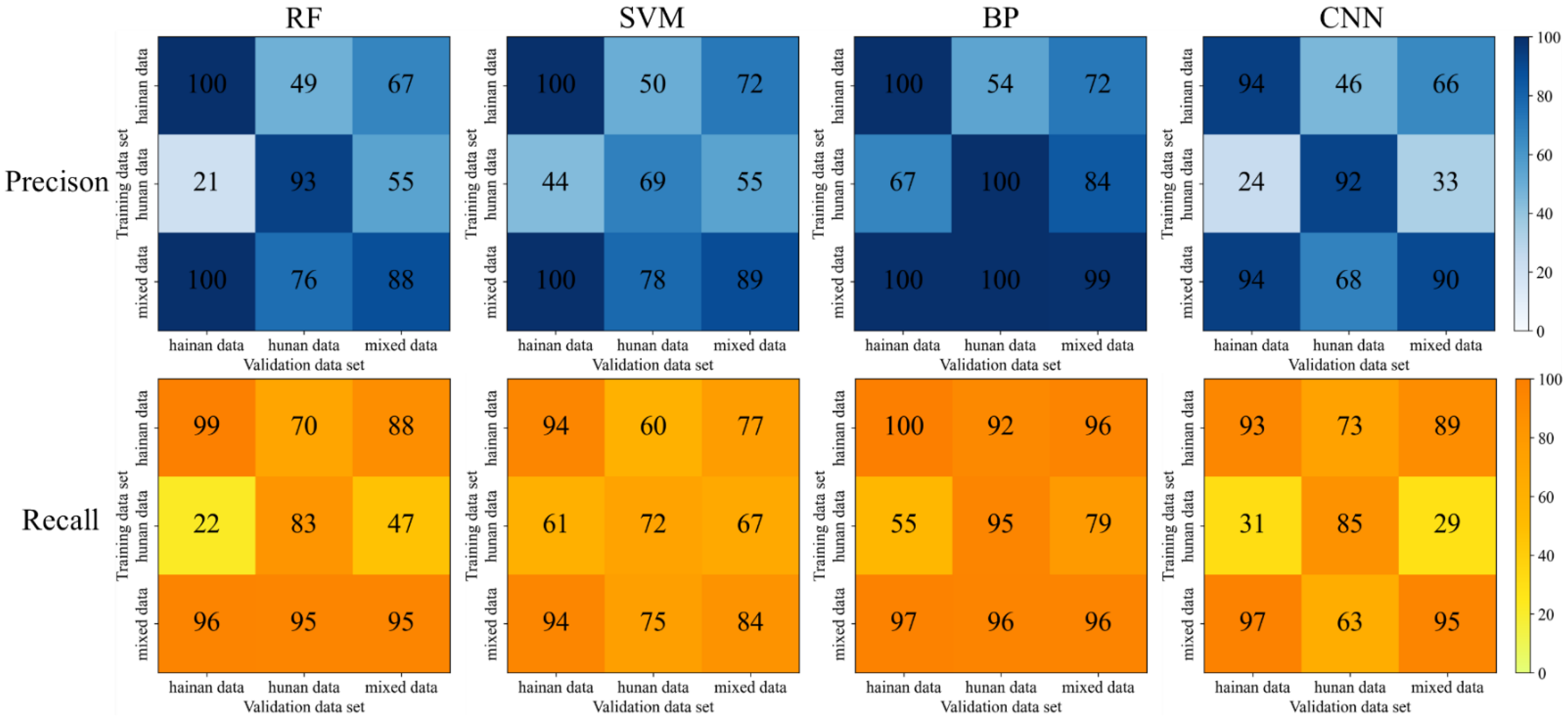
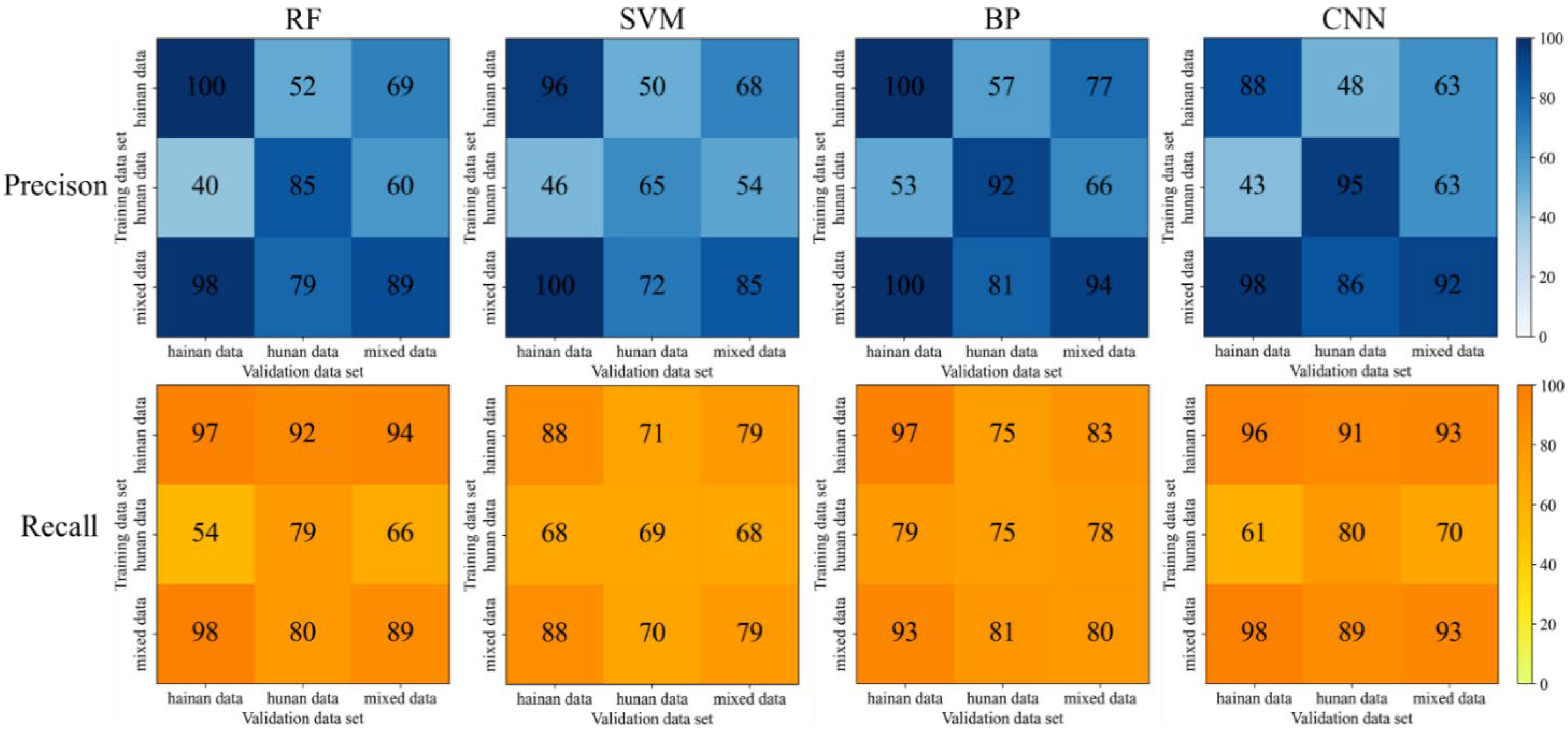
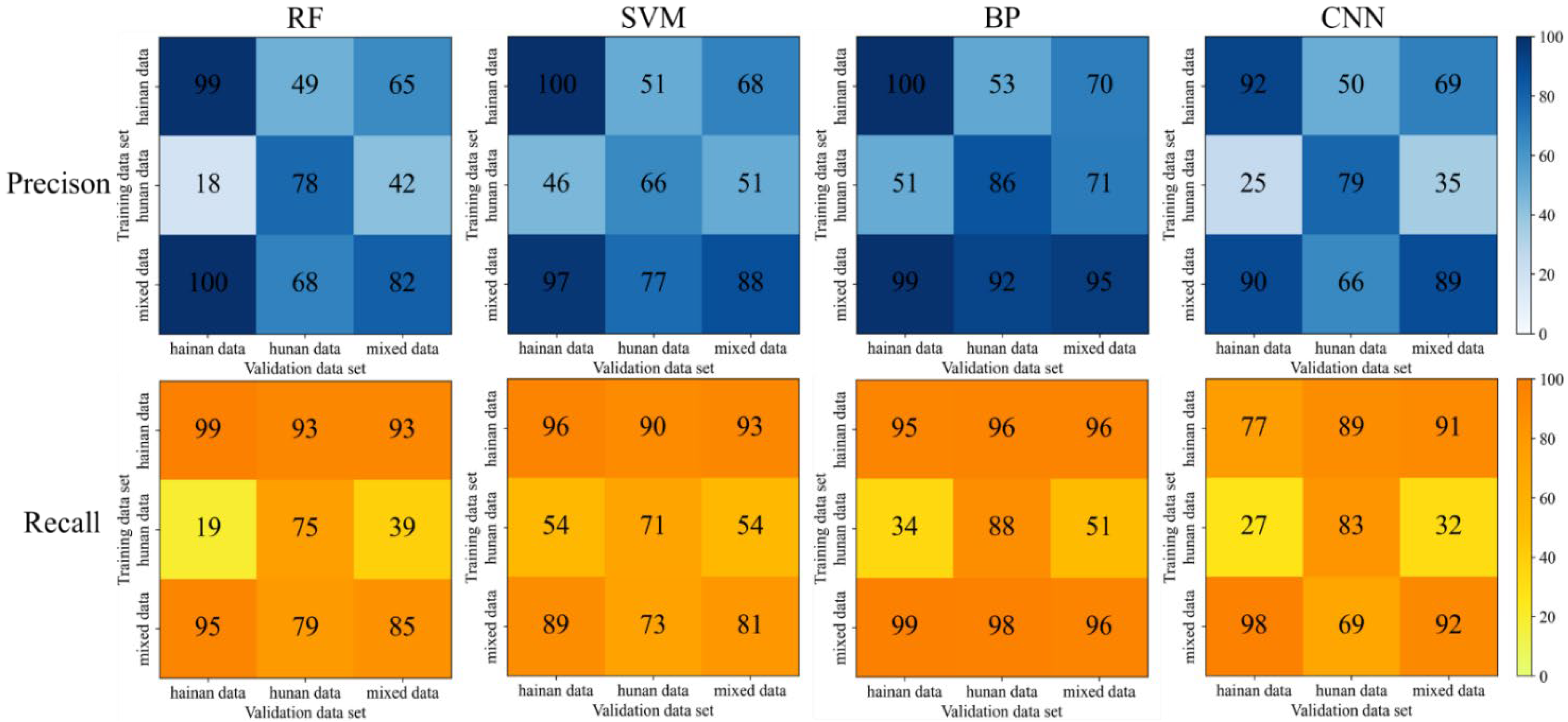
Among the four data processing methods, PCA feature extraction has the best result in terms of overall effectiveness, followed by the original data modeling, the PCA and GA combination and the GA feature selection. Among the PCA feature extraction processing methods, the BP model achieved the highest evaluation accuracy. The precision and recall rate is between 96% and 100% when trained by Hainan and mixed data, indicating that the BP model has an excellent classification effect and strong generalization ability for rice flowering detection. Although the results derived from the GA feature selection did not improve, the dimensionality of its input was reduced by nearly half while it still maintained the acceptable score, indicating that nearly half of the 751-dimensional data were not very useful for the classification of this study and could be eliminated. From the selected bands, their effective bands were basically evenly distributed, with some concentration in individual places. Most likely, it results from the similarity of the adjacent bands. After GA feature selection, the redundant information was removed to ensure the efficiency of the information; therefore, the feature reduction serves to remove the redundant and interfering features in feature bands, which in turn improves the accuracy of the processing results.
Among the four classification models, the BP algorithm model achieves a comprehensively better result, followed by the CNN model, RF model and SVM model. The results obtained by the BP algorithm model may be due to the (1) nonlinear mapping ability: BP neural network essentially realizes a mapping function from input to output; mathematical theory proves that the three-layer neural network can approach any nonlinear continuous function with arbitrary accuracy, which has strong nonlinear mapping ability. (2) Self-learning and self-adaptive ability: during training, BP neural network automatically extracts “reasonable rules” between input and output data through learning and adaptively memorizes the learning content into the weight of the network with high self-learning and self-adaptation ability. (3) Generalization ability: in the design of the pattern classifier, it cares about whether the network can correctly classify the patterns not seen before or those with noise pollution after training and has the ability to apply the learning results to new knowledge. (4) Fault tolerance: BP neural network will not have a great impact on the global training results after its local or partial neurons are damaged; the system can still work normally when local damage occurs and it has a certain fault tolerance. The reason for the relatively poor results of the CNN algorithm may be that it learns by convolution, which may lose some parts of the data and ignore the correlation between the local and the whole, thus affecting the results. RF model may be overfitted for noisy data. SVM model may not be optimal for the selection of parameters, which can only be chosen empirically and through human selection, with a certain degree of arbitrariness.
From the results of multiple processing, Hainan data have a good classification effect, probably because there is a more obvious difference between the flowering and non-flowering bands in Hainan data; however, the classification effect of Hunan data is poorer, probably because there is more noise in Hunan data or the difference between the flowering and non-flowering bands is not obvious, which makes it more difficult to classify. Comparing the generalization ability of Hainan data alone with that of Hunan data, the classification algorithm has a better generalization ability. The BP algorithm model in PCA feature extraction processing has improved generalization ability for mixed data, and the results of Hunan validation data can have a 1% improvement compared with the training results of Hunan data alone. There is a big difference between Hainan data and Hunan data. When applying the model trained by one site to validate the data from another site, the precision and recall rate is basically around 50%.
In summary, the algorithm adopted in this study is quite effective in detecting the hyperspectral data before and after rice flowering. Considering the operational problems in the data acquisition process and the influence of the objective physical environment on the instrument may cause interference to the acquisition of rice flowering hyperspectral data, there will be some influence on the results of machine identification. In addition, the sample data set adopted in this study is still small, and the algorithm should be further explored to improve the generalization ability of the algorithm for the identification of different varieties of rice flowering in different regions.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}