
Research and Analysis on the Influence of Different Speed Measurement Methods on the Monitoring Accuracy of Seed Spacing
Abstract
:1. Introduction
2. Materials and Methods
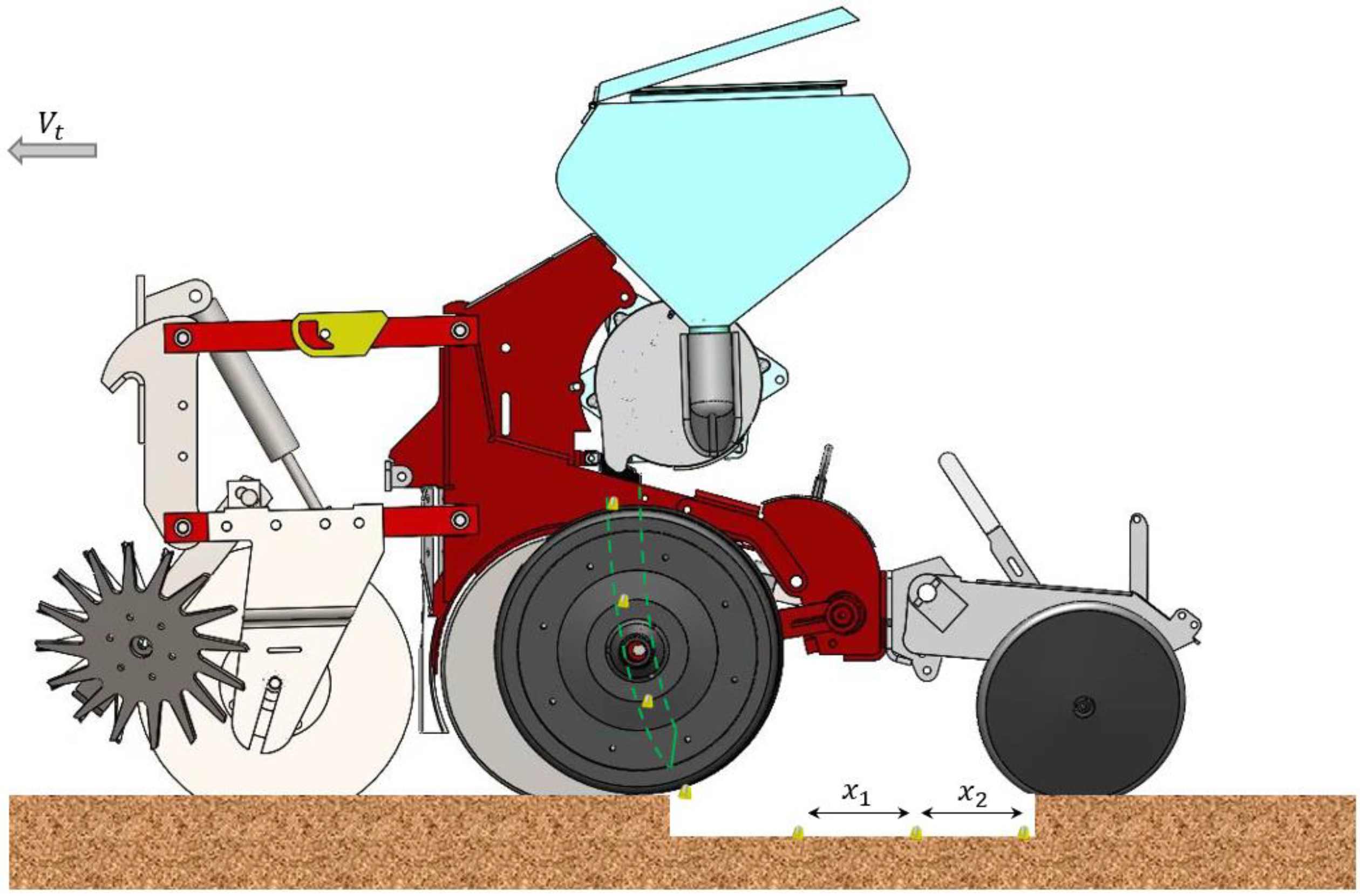
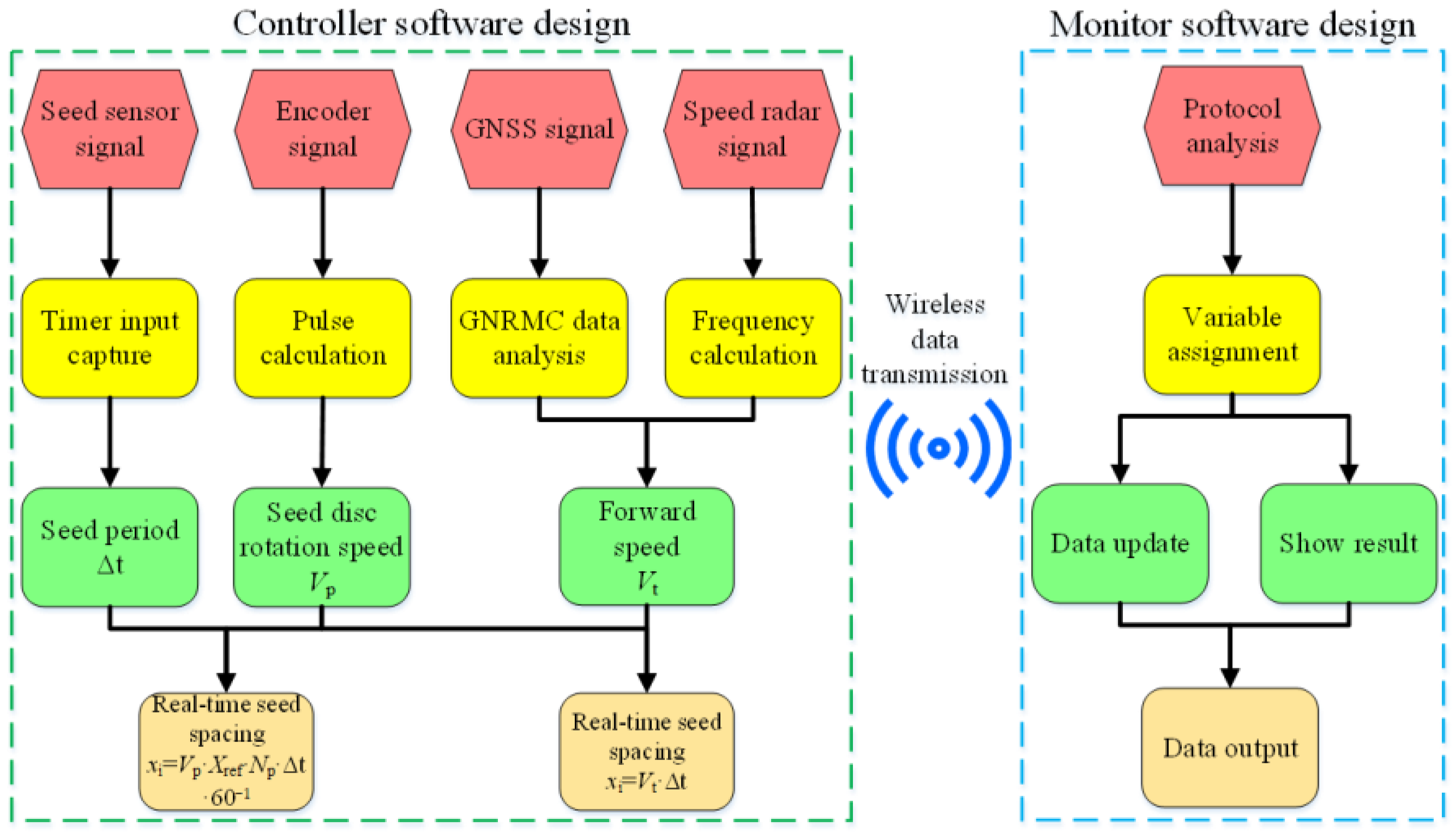
2.1. Calculation of Real-Time Seeding Spacing
2.2. Speed Measurement Method
2.2.1. GNSS Receiver Speed Measurement Method
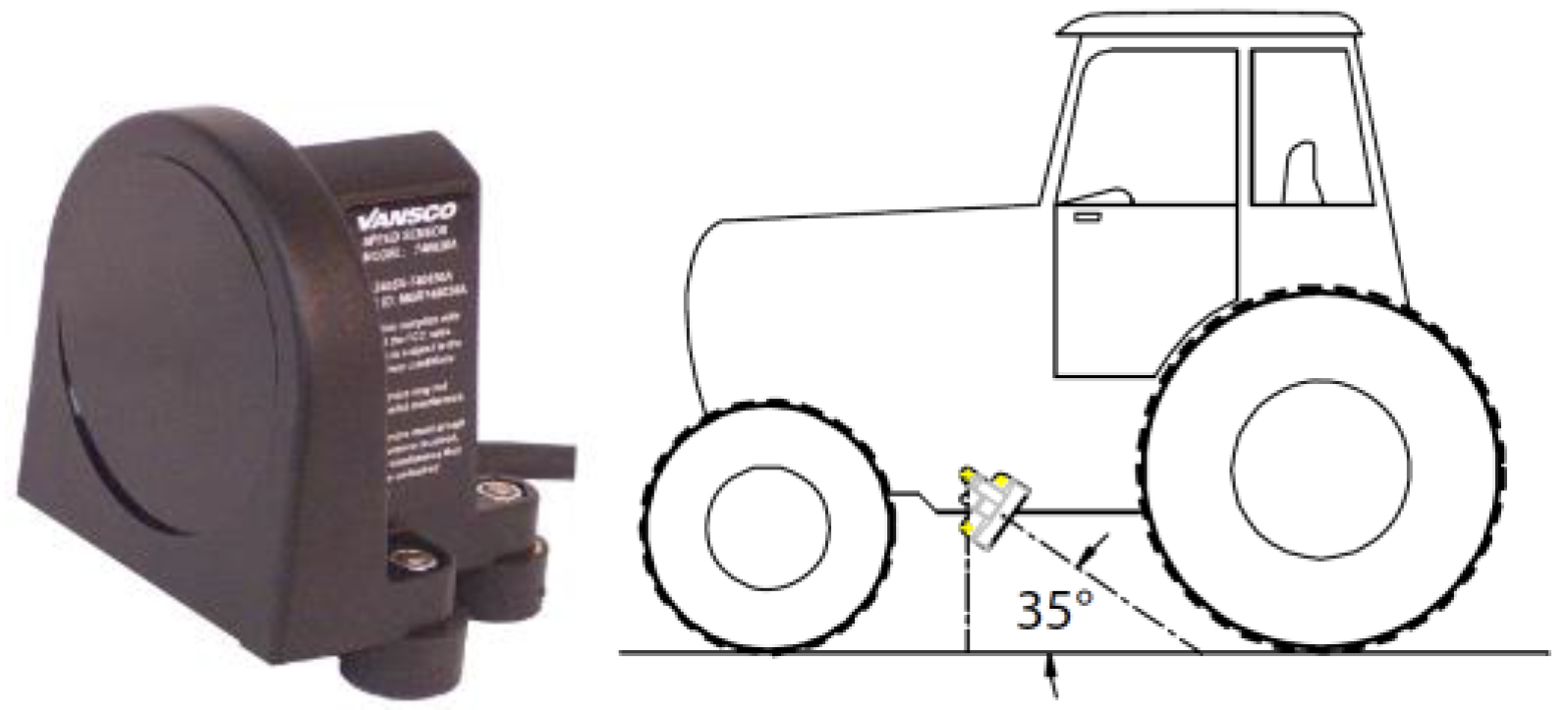
2.2.2. Radar Speed Measurement Method
2.2.3. Encoder Rotation Speed Measurement Method
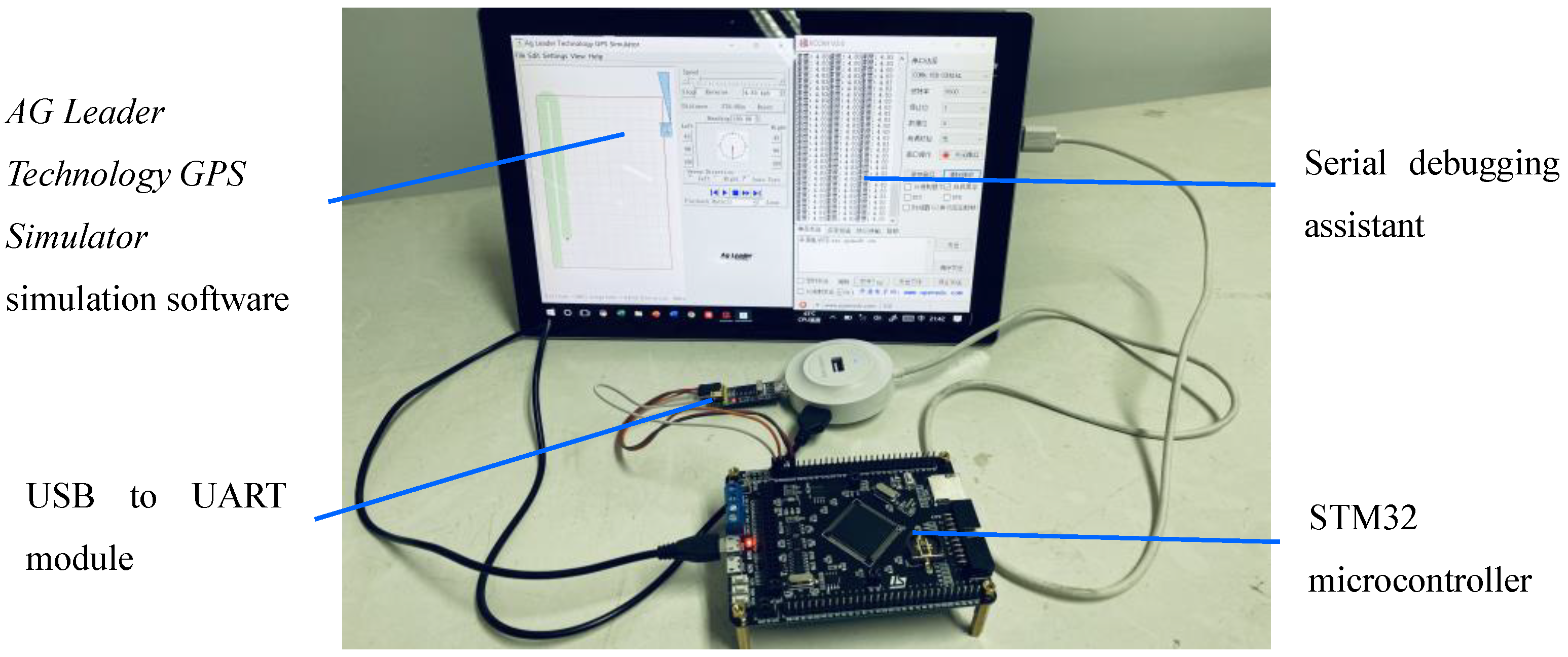
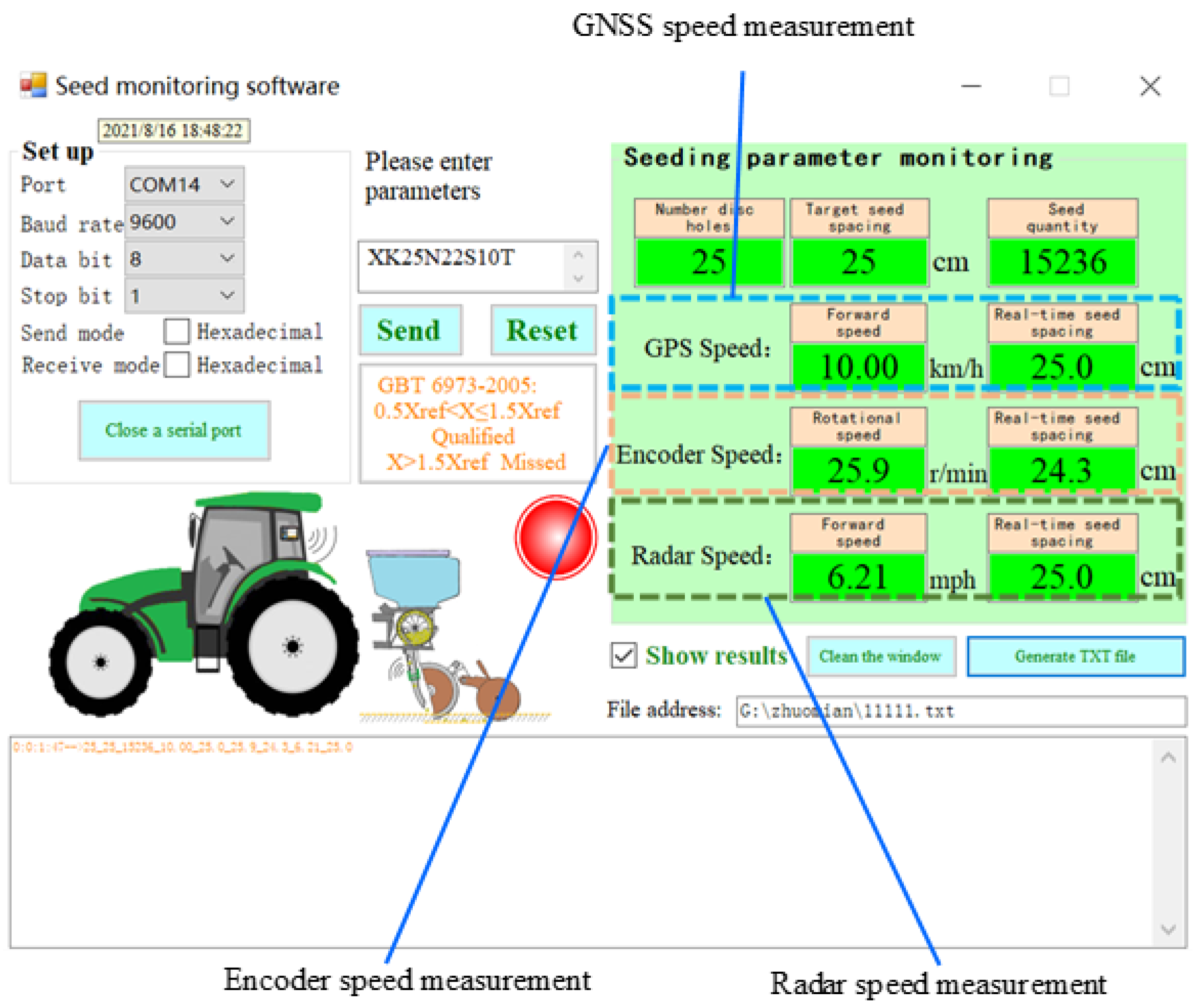
2.3. Monitoring System Software
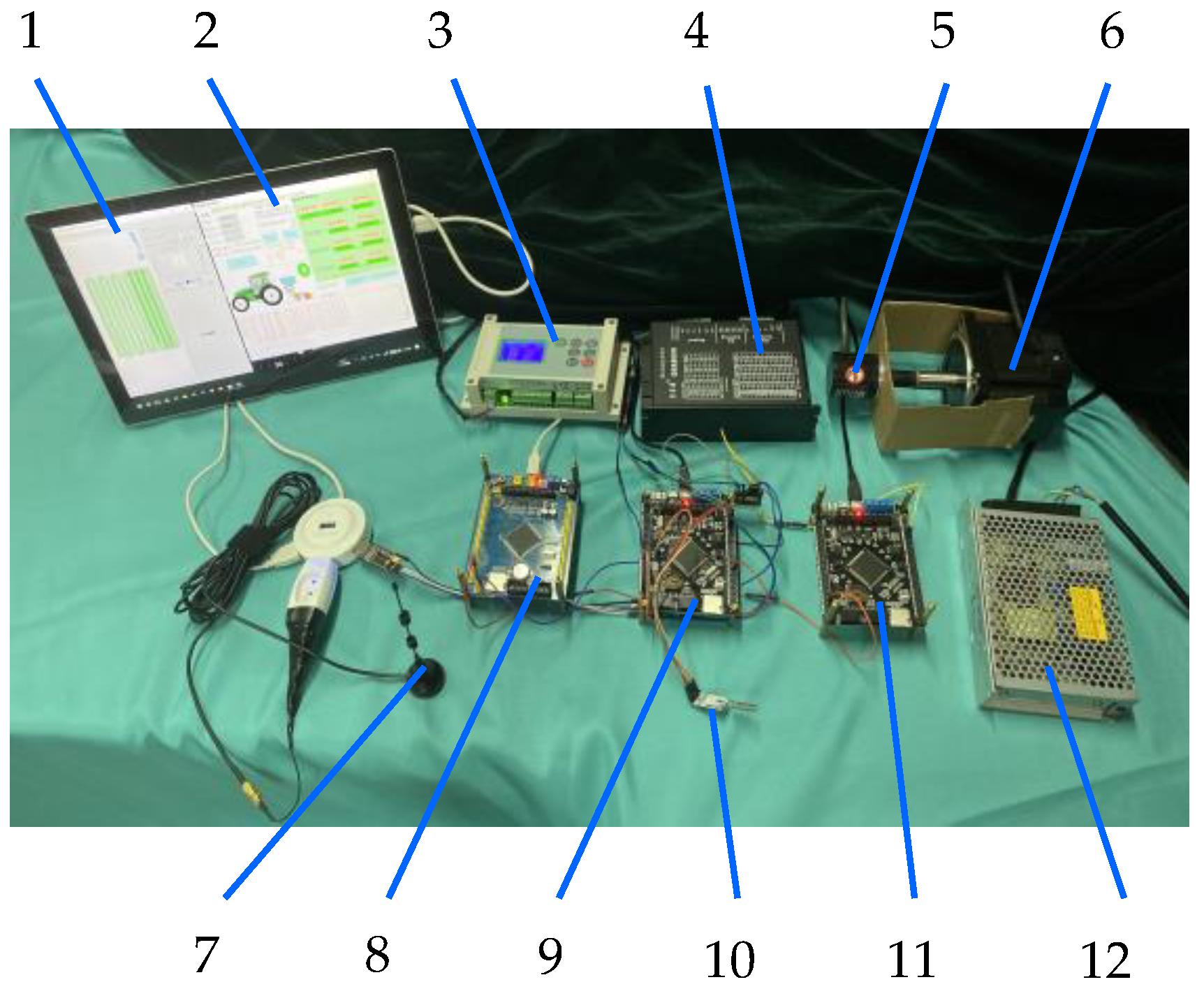
2.4. Bench and Field Tests
2.4.1. Bench and Field Tests
2.4.2. Field Test
3. Results and Discussion
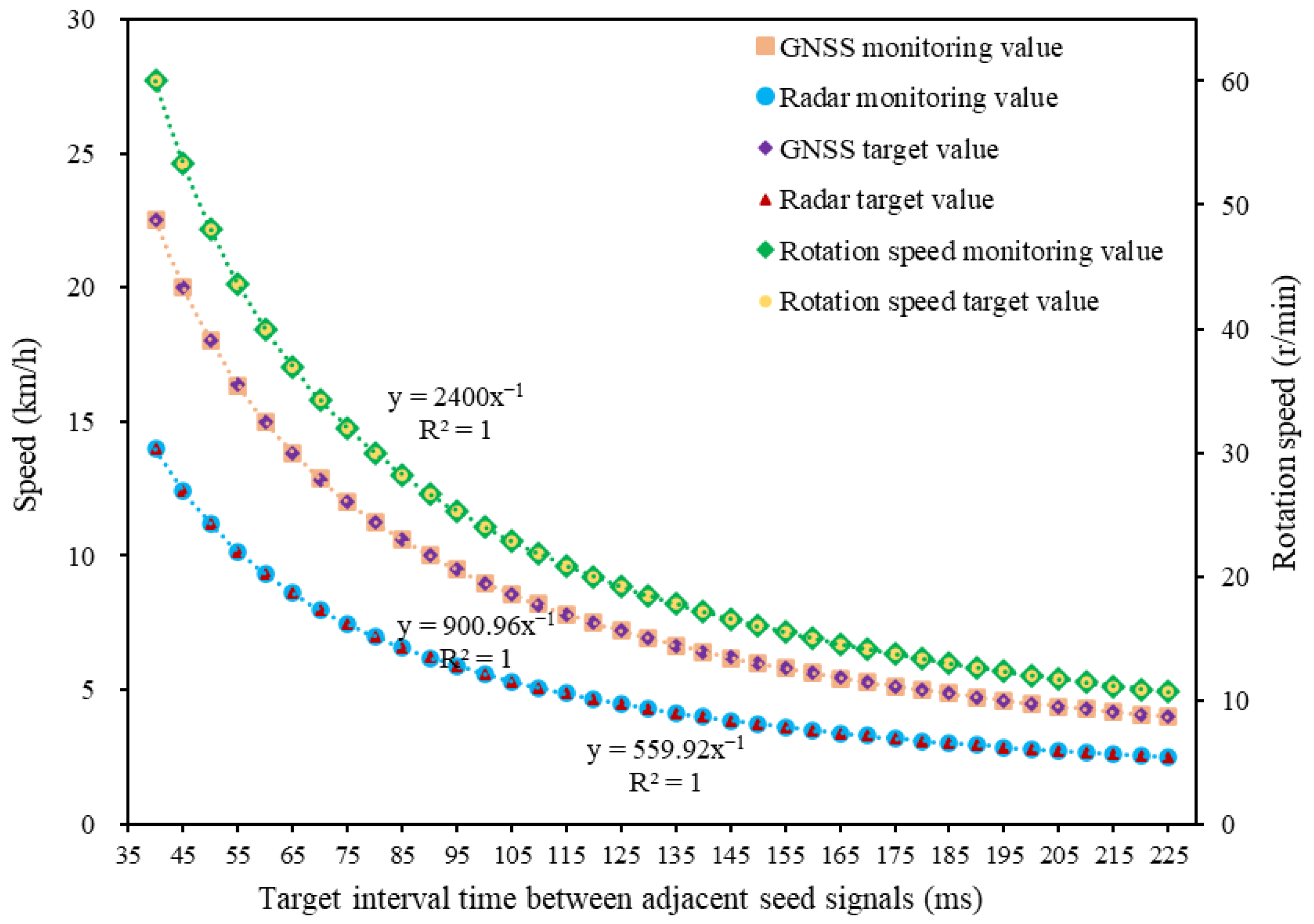
3.1. Analysis of Indoor Bench Simulation Test Results
3.2. Analysis of Field Test Results
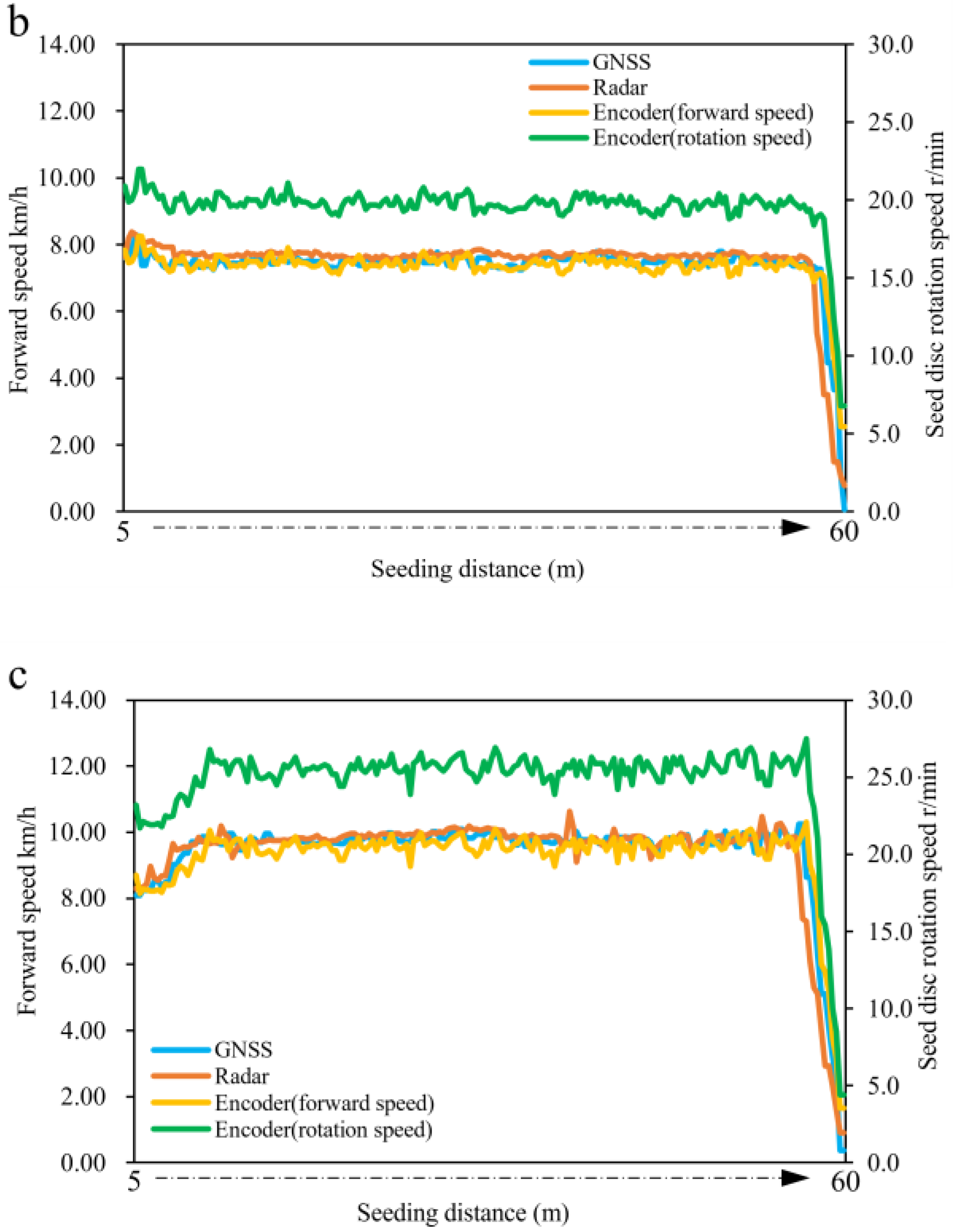
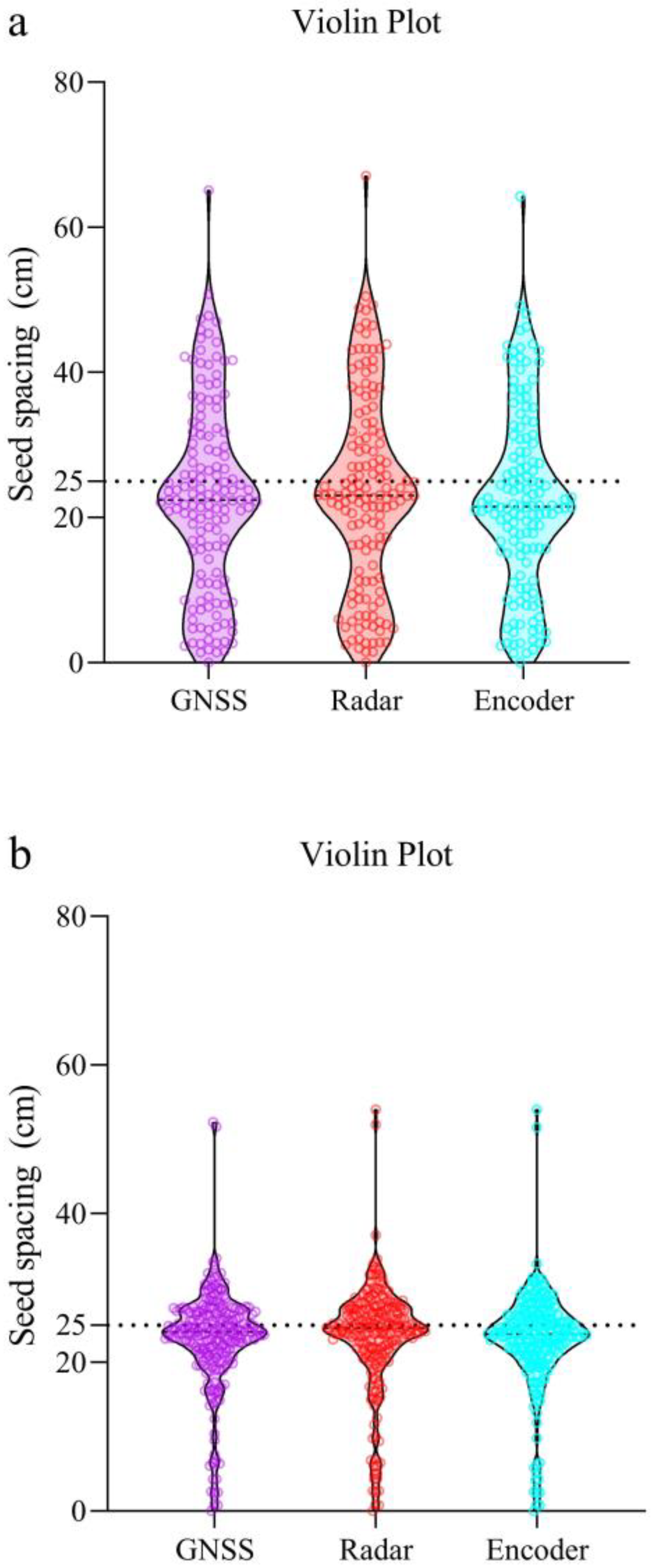
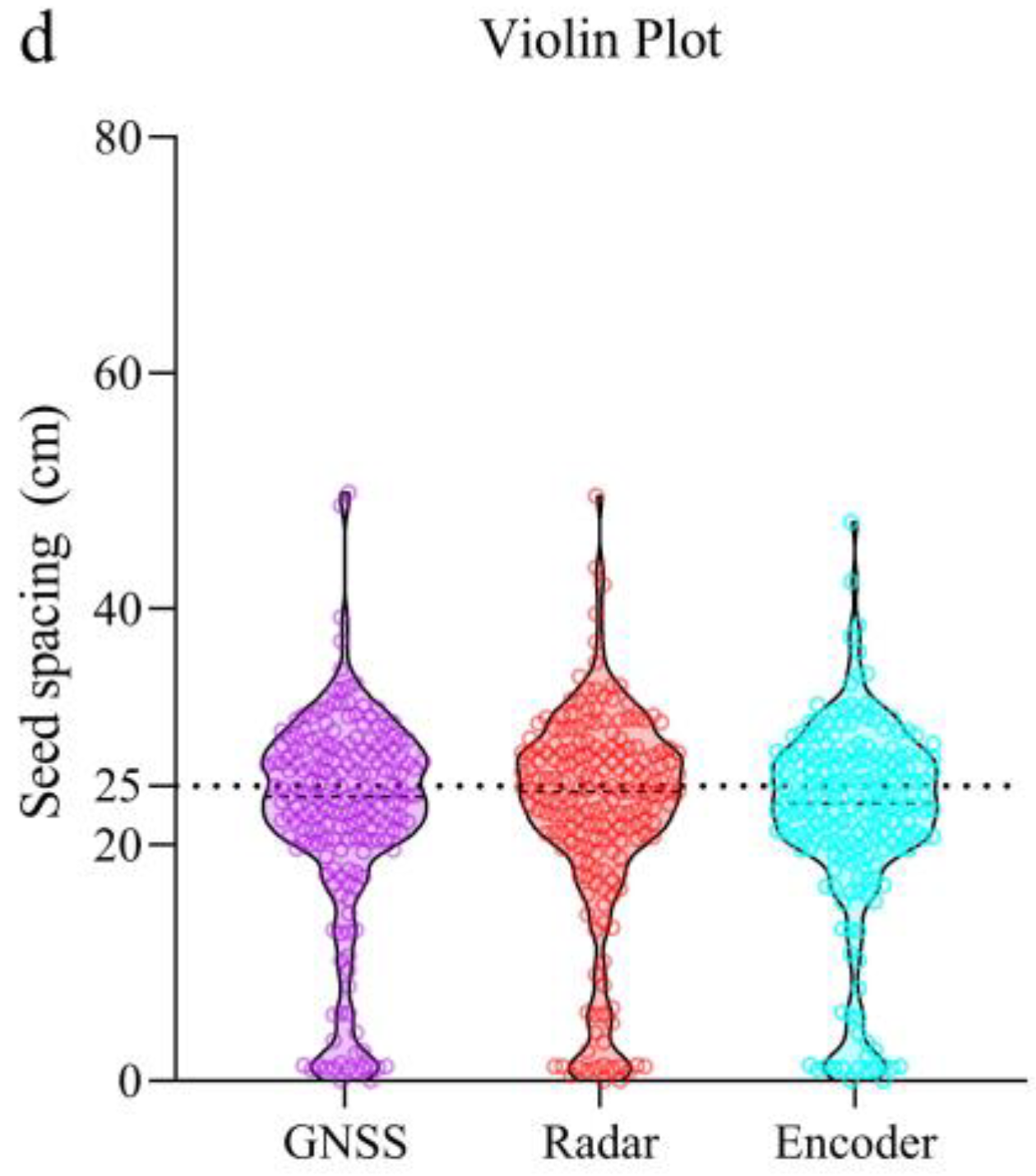
3.2.1. Analysis of Uniform-Speed Seeding Tests Results
3.2.2. Analysis of Variable-Speed Seeding Tests Results
3.3. Comprehensive Analysis
4. Conclusions
- (1)
- According to the bench test results, the monitoring system designed on the basis of the three speed measurement methods of GNSS, radar, and encoder had high monitoring accuracy. Compared with analog equipment, the monitored value was the same as the target value, and the accuracy rate was above 99%.
- (2)
- According to the field test results, it was found that the speed monitoring values of the three speed measurement methods and the real-time seeding spacing monitoring values had extremely high correlation, with a correlation coefficient R > 0.95. This further showed that the three speed measurement methods had little impact on the monitoring results and did not cause large errors. Therefore, these three speed measurement methods were suitable for the requirements of current field seeding operations.
- (3)
- After comprehensive consideration of the price and installation complexity of the three types of speed measurement equipment, the GNSS receiver is primarily recommended for speed measurement. Because of its relatively low price, it is very easy to install and use, and its monitoring accuracy and real-time performance fully meet the needs. An excellent speed measurement method is very important for the precise monitoring of real-time seeding spacing in the future, and it is also very helpful for further improving the monitoring accuracy of seeding quality parameters.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Gao, X.; Xu, Y.; Zhang, D.; Yang, L.; Lu, B.; Su, Y.; Xia, G.; Cui, T. Design and experiment of air-assisted high speed precision maize seed metering device. Trans. CSAE 2019, 35, 9–20. [Google Scholar] [CrossRef]
- Ding, L.; Yang, L.; Zhang, D.; Cui, T.; Gao, X. Design and experiment of seed plate of corn air suction seed metering device based on DEM-CFD. Trans. Chin. Soc. Agric. Mach. 2019, 50, 50–60. [Google Scholar] [CrossRef]
- Ding, L.; Yang, L.; Liu, S.; Yan, B.; He, X.; Zhang, D. Design of air suction high speed precision maize seed metering device with assistant seed filling plate. Trans. CSAE 2018, 34, 1–11. [Google Scholar] [CrossRef]
- Yang, L.; Yan, B.; Zhang, D.; Zhang, T.; Wang, Y.; Cui, T. Research progress on precision planting technology of maize. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–48. [Google Scholar] [CrossRef]
- Yuan, Y.; Bai, H.; Fang, X.; Wang, D.; Zhou, L.; Niu, K. Research progress on maize seeding and its measurement and control technology. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–18. [Google Scholar] [CrossRef]
- ISO Standard 7256/1-1984(E); Sowing Equipment-Test Methods Part 1: Single Seed Drills (Precision Drills). International Organization for Standardization: Geneva, Switzerland, 1984.
- GB/T 6973-2005; Standardization Administration of the PR China and General Administration of Quality Supervision, Inspection and Quarantine of the PR China. Testing Methods of Single Seed Drills (Precision Drills). China Machinery Industry Federation: Beijing, China, 2005.
- Xie, C.; Yang, L.; Zhang, D.; Cui, T.; Zhang, K. Seeding parameter monitoring method based on laser sensors. Trans. CSAE 2021, 37, 140–146. [Google Scholar] [CrossRef]
- Karimi, H.; Navid, H.; Besharati, B.; Behfar, H.; Eskandari, I. A practical approach to comparative design of non-contact sensing techniques for seed flow rate detection. Comput. Electron. Agric. 2017, 142, 165–172. [Google Scholar] [CrossRef]
- Che, Y.; Wei, L.; Liu, X.; Li, Z.; Wang, F. Design and experiment of seeding quality infrared monitoring system for no-tillage seeder. Trans. CSAE 2017, 33, 11–16. [Google Scholar] [CrossRef]
- Tian, L.; Yi, S.; Yao, L.; Li, Y.; Li, A.; Liu, K.; Liu, Y.; Xu, C. Kind of monitoring system based on capacitance signal research. J. Agric. Mech. Res. 2018, 40, 189–194. [Google Scholar] [CrossRef]
- Zhao, B.; Fan, X.; Zhou, L.; Li, Y.; Che, Y.; Niu, K. Design and test of piezoelectric flow sensor for pneumatic seeder. Trans. Chin. Soc. Agric. Mach. 2020, 51, 55–61. [Google Scholar] [CrossRef]
- He, X.; Hao, Y.; Zhao, D.; Zhang, D.; Cui, T.; Yang, L. Design and experiment of testing instrument for maize precision seed meter’s performance detection. Trans. Chin. Soc. Agric. Mach. 2016, 47, 19–27. [Google Scholar] [CrossRef]
- Yang, S.; Wang, X.; Gao, Y.; Chen, L.; Zhai, C.; Dou, H. Design of on-line seed spacing monitoring and miss seeding warning system for maize precision planting. Trans. Chin. Soc. Agric. Mach. 2021, 52, 17–24+35. [Google Scholar] [CrossRef]
- Hao, Y.; Cui, T.; Bora, G.; Zhang, D.; Wei, J.; He, X.; Wang, M.; Yang, L. Development of an instrument to measure planter seed meter performance. Appl. Eng. Agric. 2018, 33, 31–40. [Google Scholar] [CrossRef]
- Ding, Y.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Zhong, X. Control system of motor-driving maize precision planter based on GPS speed measurement. Trans. Chin. Soc. Agric. Mach. 2018, 49, 43–49. [Google Scholar] [CrossRef]
- Yang, S.; Wang, X.; Zhai, C.; Dou, H.; Gao, Y.; Zhao, C. Design and test on variable rate fertilization system supporting seeding and fertilizing monitoring. Trans. Chin. Soc. Agric. Mach. 2018, 49, 145–153. [Google Scholar] [CrossRef]
- Chen, L.; Xie, B.; Li, Z.; Yang, L.; Chen, Y. Design of control system of maize precision seeding based on double closed loop PID fuzzy algorithm. Trans. CSAE 2018, 34, 33–41. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, R.; Chen, L. Design and test of electronic control seeding system for maize. Trans. Chin. Soc. Agric. Mach. 2017, 48, 51–59. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, G.; Ruan, P.; Diao, P.; Jin, C. Application review on electric-driven seed metering device of domestic precision seeder for maize or soybean. J. Chin. Agric. Mech. 2017, 38, 13–16. [Google Scholar] [CrossRef]
- Sun, Y.; Shen, J.; Dou, Q.; Li, Q.; Chen, G.; Sun, Y. Design and test of monitoring system of no-tillage planter based on Cortex-M3 processor. Trans. Chin. Soc. Agric. Mach. 2018, 49, 50–58. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, Z.; Wang, C.; Jian, S.; Liu, T.; Cui, D. Design of monitoring system for wheat precision seeding-fertilizing machine based on variable distance photoelectric sensor. Trans. CSAE 2018, 34, 27–34. [Google Scholar] [CrossRef]
- Li, Z.; Ren, Z.; Wang, Y. Design of corn precision seeding control system based on PLC. J. Agric. Mech. Res. 2020, 42, 70–74. [Google Scholar] [CrossRef]
- Yin, X.; Yang, T.; Jin, C.; Du, J. Development of an intelligent control system for precision corn seeding. J. Agric. Mech. Res. 2018, 40, 125–133. [Google Scholar] [CrossRef]
- Abdolahzare, Z.; Mehdizadeh, S.A. Real time laboratory and field monitoring of the effect of the operational parameters on seed falling speed and trajectory of pneumatic planter. Comput. Electron. Agric. 2018, 145, 187–198. [Google Scholar] [CrossRef]
- Abdolahzare, Z.; Mehdizadeh, S.A. Nonlinear mathematical modeling of seed spacing uniformity of a pneumatic planter using genetic programming and image processing. Neural Comput. Appl. 2018, 29, 363–375. [Google Scholar] [CrossRef]
- Beitian Communication Co., Ltd. BD-8953DU GNSS Receiver. Available online: http://www.sz-beitian.com/ProductsDetail?product_id=1391 (accessed on 4 June 2021).
- Micro-Trak Systems, Inc. USA, Vansco 740 Speed Radar. Available online: https://micro-trak.com/product/vansco-speed-sensor/ (accessed on 4 June 2021).
- Precision Planting Co., Ltd. MeterMax Monitor. Available online: https://cloud.precisionplanting.com/products (accessed on 4 June 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed (km·h−1) | Fd (Hz) | Time Period (s) | Speed (km·h−1) | Fd (Hz) | Time Period (s) |
|---|---|---|---|---|---|
| 4 | 146.41 | 0.006830 | 14 | 512.45 | 0.001951 |
| 6 | 219.62 | 0.004553 | 16 | 585.65 | 0.001708 |
| 8 | 292.83 | 0.003415 | 18 | 658.86 | 0.001518 |
| 10 | 366.03 | 0.002732 | 20 | 732.06 | 0.001366 |
| 12 | 439.24 | 0.002277 | 22 | 805.27 | 0.001242 |
| Speed (km·h−1) | (r·min−1) | ||
|---|---|---|---|
| 20 cm | 25 cm | 30 cm | |
| 4 | 13.33 | 10.67 | 8.89 |
| 6 | 20.00 | 16.00 | 13.33 |
| 8 | 26.67 | 21.33 | 17.78 |
| 10 | 33.33 | 26.67 | 22.22 |
| 12 | 40.00 | 32.00 | 26.67 |
| 14 | 46.67 | 37.33 | 31.11 |
| 16 | 53.33 | 42.67 | 35.56 |
| 18 | 60.00 | 48.00 | 40.00 |
| 20 | 66.67 | 53.33 | 44.44 |
| 22 | 73.33 | 58.67 | 48.89 |
| Speed (km·h−1) | Target Time between Two Seeds (s) | ||
|---|---|---|---|
| 20 cm | 25 cm | 30 cm | |
| 4 | 0.1800 | 0.2250 | 0.2700 |
| 6 | 0.1200 | 0.1500 | 0.1800 |
| 8 | 0.0900 | 0.1125 | 0.1350 |
| 10 | 0.0720 | 0.0900 | 0.1080 |
| 12 | 0.0600 | 0.0750 | 0.0900 |
| 14 | 0.0514 | 0.0643 | 0.0771 |
| 16 | 0.0450 | 0.0563 | 0.0675 |
| 18 | 0.0400 | 0.0500 | 0.0600 |
| 20 | 0.0360 | 0.0450 | 0.0540 |
| 22 | 0.0327 | 0.0409 | 0.0491 |
| Test | Speed Measurement Method | GNSS | Radar | Encoder | |||
|---|---|---|---|---|---|---|---|
| R | P | R | P | R | P | ||
| a | GNSS | 1 | * | 0.956 | <0.01 | 0.958 | <0.01 |
| Radar | 0.956 | <0.01 | 1 | * | 0.916 | <0.01 | |
| Encoder | 0.958 | <0.01 | 0.916 | <0.01 | 1 | * | |
| b | GNSS | 1 | * | 0.921 | <0.01 | 0.944 | <0.01 |
| Radar | 0.921 | <0.01 | 1 | * | 0.887 | <0.01 | |
| Encoder | 0.944 | <0.01 | 0.887 | <0.01 | 1 | * | |
| c | GNSS | 1 | * | 0.953 | <0.01 | 0.969 | <0.01 |
| Radar | 0.953 | <0.01 | 1 | * | 0.910 | <0.01 | |
| Encoder | 0.969 | <0.01 | 0.910 | <0.01 | 1 | * | |
| Test | Speed Measurement Method | GNSS | Radar | Encoder | |||
|---|---|---|---|---|---|---|---|
| R | P | R | P | R | P | ||
| a | GNSS | 1 | * | 0.995 | <0.01 | 0.990 | <0.01 |
| Radar | 0.995 | <0.01 | 1 | * | 0.988 | <0.01 | |
| Encoder | 0.990 | <0.01 | 0.988 | <0.01 | 1 | * | |
| b | GNSS | 1 | * | 0.980 | <0.01 | 0.985 | <0.01 |
| Radar | 0.980 | <0.01 | 1 | * | 0.951 | <0.01 | |
| Encoder | 0.985 | <0.01 | 0.951 | <0.01 | 1 | * | |
| c | GNSS | 1 | * | 0.989 | <0.01 | 0.994 | <0.01 |
| Radar | 0.989 | <0.01 | 1 | * | 0.983 | <0.01 | |
| Encoder | 0.994 | <0.01 | 0.983 | <0.01 | 1 | * | |
| Test | Speed Measurement Method | GNSS | Radar | Encoder | |||
|---|---|---|---|---|---|---|---|
| R | P | R | P | R | P | ||
| a | GNSS | 1 | * | 0.973 | <0.01 | 0.978 | <0.01 |
| Radar | 0.973 | <0.01 | 1 | * | 0.953 | <0.01 | |
| Encoder | 0.978 | <0.01 | 0.953 | <0.01 | 1 | * | |
| b | GNSS | 1 | * | 0.959 | <0.01 | 0.955 | <0.01 |
| Radar | 0.959 | <0.01 | 1 | * | 0.920 | <0.01 | |
| Encoder | 0.955 | <0.01 | 0.920 | <0.01 | 1 | * | |
| c | GNSS | 1 | * | 0.975 | <0.01 | 0.976 | <0.01 |
| Radar | 0.975 | <0.01 | 1 | * | 0.946 | <0.01 | |
| Encoder | 0.976 | <0.01 | 0.946 | <0.01 | 1 | * | |
| Test | Speed Measurement Method | GNSS | Radar | Encoder | |||
|---|---|---|---|---|---|---|---|
| R | P | R | P | R | P | ||
| a | GNSS | 1 | * | 0.988 | <0.01 | 0.981 | <0.01 |
| Radar | 0.988 | <0.01 | 1 | * | 0.973 | <0.01 | |
| Encoder | 0.981 | <0.01 | 0.973 | <0.01 | 1 | * | |
| b | GNSS | 1 | * | 0.974 | <0.01 | 0.990 | <0.01 |
| Radar | 0.974 | <0.01 | 1 | * | 0.960 | <0.01 | |
| Encoder | 0.990 | <0.01 | 0.960 | <0.01 | 1 | * | |
| c | GNSS | 1 | * | 0.987 | <0.01 | 0.991 | <0.01 |
| Radar | 0.987 | <0.01 | 1 | * | 0.973 | <0.01 | |
| Encoder | <0.01 | <0.01 | 1 | * | |||
| Speed Measuring Equipment | Model | Purchase Price (RMB) | Complexity of Use |
|---|---|---|---|
| GNSS receiver | BD-8953U | 295 | Easy to install |
| Radar | Vansco 740 | 4000 | Difficult to install |
| Encoder | E6B2-CWZ3E | 88 | Relatively easy to install |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, C.; Zhang, D.; Yang, L.; Cui, T.; He, X.; Du, Z.; Xiao, T. Research and Analysis on the Influence of Different Speed Measurement Methods on the Monitoring Accuracy of Seed Spacing. Agriculture 2023, 13, 128. https://doi.org/10.3390/agriculture13010128
Xie C, Zhang D, Yang L, Cui T, He X, Du Z, Xiao T. Research and Analysis on the Influence of Different Speed Measurement Methods on the Monitoring Accuracy of Seed Spacing. Agriculture. 2023; 13(1):128. https://doi.org/10.3390/agriculture13010128
Chicago/Turabian StyleXie, Chunji, Dongxing Zhang, Li Yang, Tao Cui, Xiantao He, Zhaohui Du, and Tianpu Xiao. 2023. "Research and Analysis on the Influence of Different Speed Measurement Methods on the Monitoring Accuracy of Seed Spacing" Agriculture 13, no. 1: 128. https://doi.org/10.3390/agriculture13010128