
Enabling Autonomous Navigation on the Farm: A Mission Planner for Agricultural Tasks


Abstract
:1. Introduction
2. Materials and Methods
2.1. Types of Maps
- Metric maps: These maps combine information from obstacle-based maps with an occupational grid for global location and detailed navigation in local areas. Metric maps focus on representing the precise configuration and location of features in the working environment, describing the geometry of space, dimensions of obstacles, terrain features, and other relevant elements [18].
- Topological maps: Topological maps model the working environment as a graph, capturing spatial relationships and connectivity between different locations. They use graph or network structures, where nodes represent key locations and links represent connections or paths between these nodes. Topological maps simplify the representation of the environment by capturing the overall structure and relationships between sites, facilitating route planning and navigation by autonomous robots [19,20].
- Semantic maps: These maps focus on representing the meaning and contextual information of features in the working environment. They incorporate meta-information and attributes that provide additional knowledge about the characteristics and function of areas or objects in the environment. In the agricultural field, these maps are essential for specific crop areas, irrigated areas, areas with pests, or areas of particular interest [21].
2.2. Mobile Platform
2.3. Communication Architecture
2.4. Mapping
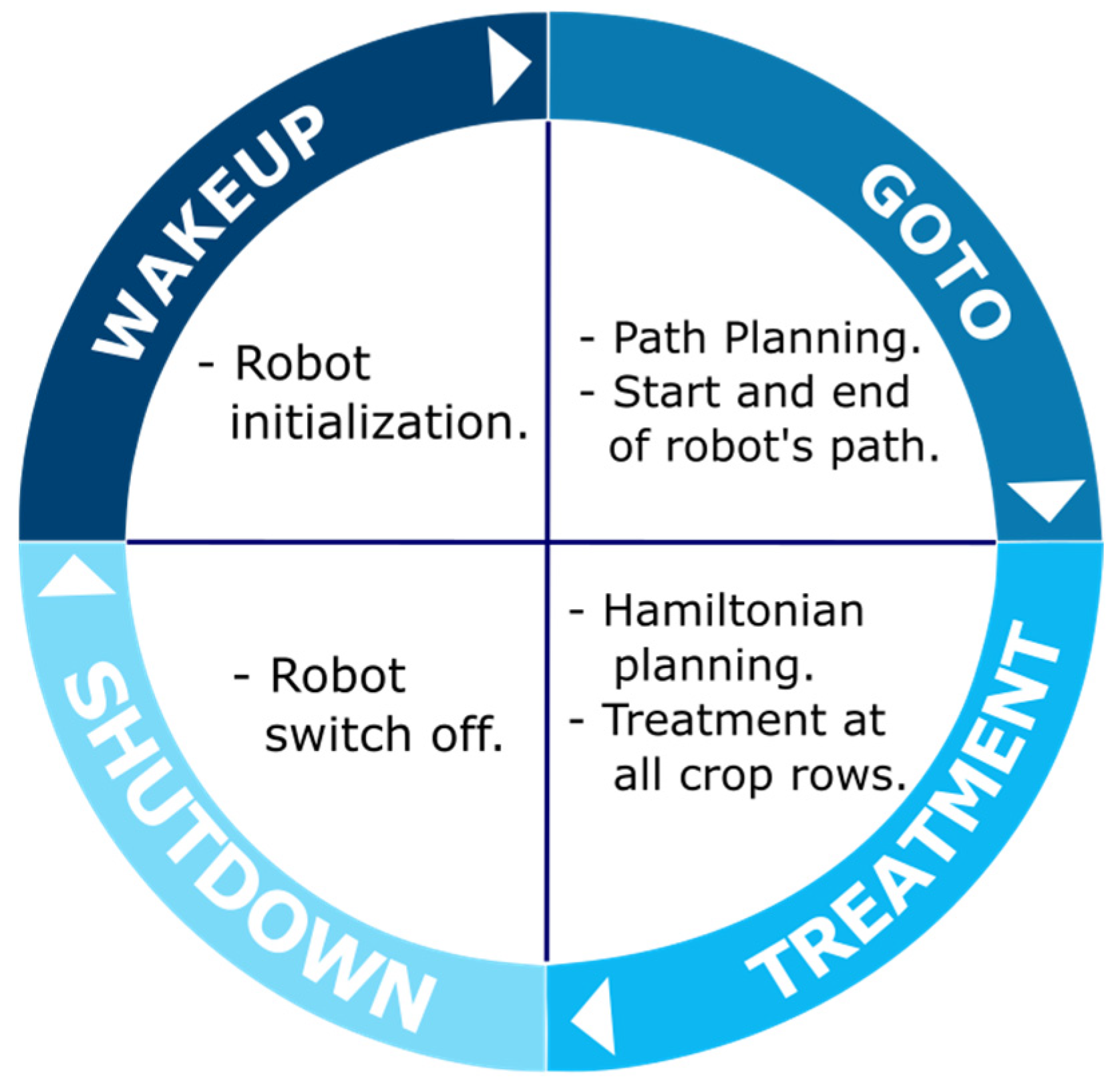
2.5. Agricultural Mission
- ACTION: A specific activity for which the robot is programmed. This involves dividing complex trajectories into simpler ones.
- OPERATION: A set of specific actions for which the robot is programmed.
- TASK PLANNING (Mission): A set of tasks that the robot has to perform in the working environment (farm) and must be completed in a specific order and time.
- start the robot modules;
- initialize the procedures and sensors;
- establish communications between internal systems.
- plan the movement of the robot between each crop line;
- activate and deactivate the laser-based tool when the presence of weeds is detected between crops;
- perform a robot’s U-turn to change the crop line in the headlands.
2.6. Mission Planner
2.6.1. GoTo Path Planning
- (i)
- Input and output parameters in the “GoTo” operation
- User-defined input and output variables
- From place: Represents the starting area in the farm (Building, RoadSegment, or the same AgriParcel) from where the robot begins its navigation.
- AgriParcel: Indicates the endpoint or destination of the “GoTo” operation.
- Round trip: This variable determines whether the robot should perform a round trip (where the robot returns to the mission’s starting point) or a one-way operation (where the mission ends at the end of the treatment in the field itself).
- Input and output variables related by the field
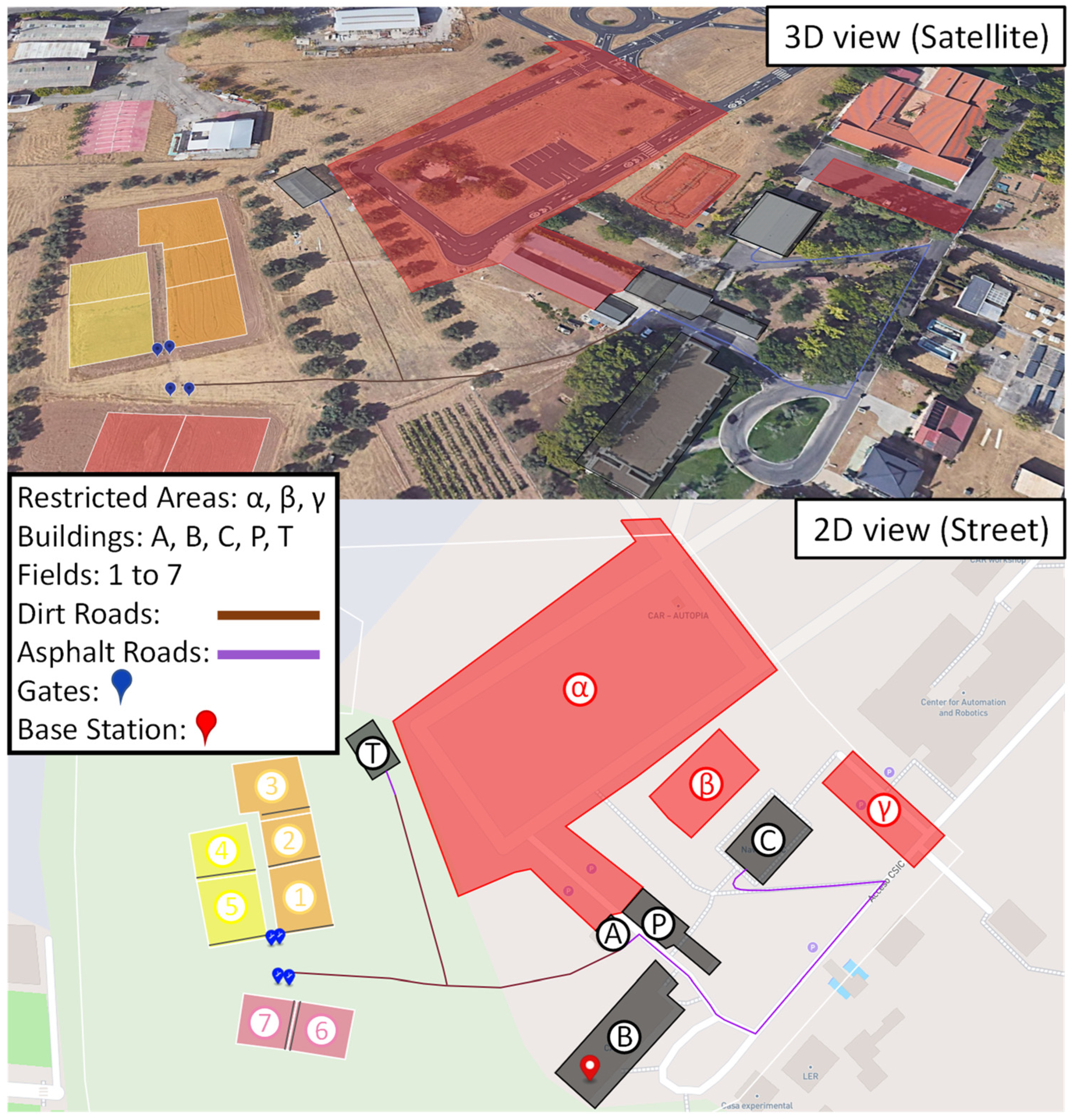
- Entities: Represents the different elements that make up the farm, such as Building, RestrictedTrafficArea, AgriParcel, and RoadSegment. These elements are extracted from the map and correctly classified according to their typology. RestrictedTrafficArea are forbidden places where the robot cannot pass.
- Road: Represents the type of paths and its structure. In this study, considering the field where the tests were conducted, the roads have been categorized according to the material they are made of, including two main types: dirt roads and asphalt roads. In addition, it is essential to note that these roads are interconnected to facilitate the robot’s navigation.
- Open field: Indicates if the robot is operating in an open field and must navigate safely in this type of terrain.
- (ii)
- Conditions and restrictions
- (iii)
- Route planner approach to Operation “GoTo”
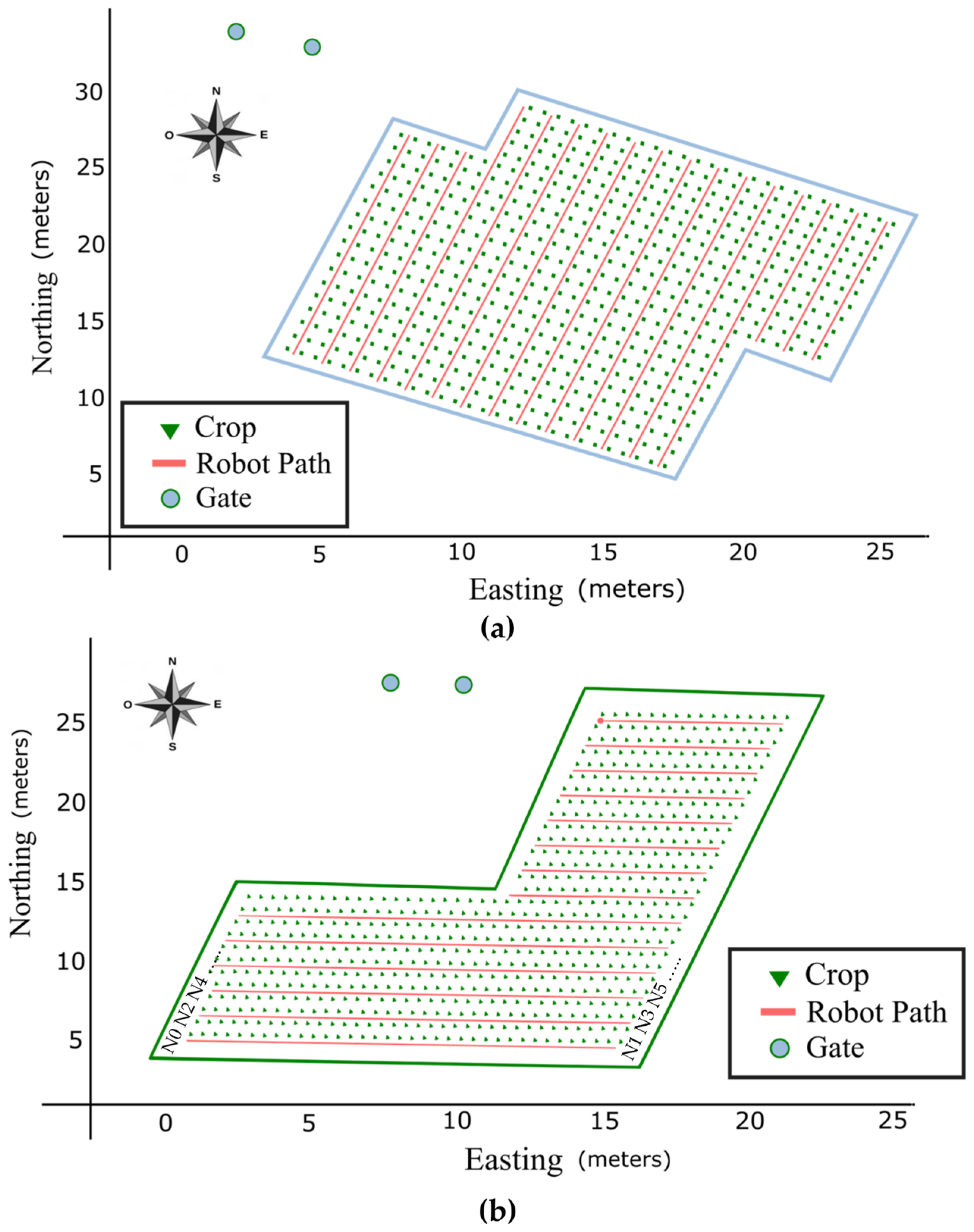
2.6.2. “Treatment” Plan: Route Planning
- (i)
- Input and output parameters in “Treatment”
- User-defined input variables
- AgriParcel: Indicates the working area where the “Treatment” operation will occur.
- interRow: The distance between crop lines. This information can also be defined by the type of crop belonging to the field.
- Headland: The space available at the end of each crop row where the robot performs the U-turn maneuvers.
- Robot-defined input variables
- Robot and implement dimensions: The accuracy with which the robot can work within fields depends mainly on its size and the implement it uses. Therefore, it is crucial to review the characteristics of the robot carefully. In this study, those characteristics are detailed in Table 1.
- Input variables defined by the field
- Field area: Contains the shape and dimensions of the field; this can be a closed polygon of more than 4 sides.
- gateLocation: Holds the coordinates of the access door to the field.
- Bearing: Contains the direction of crops expressed in degrees measured clockwise from true or magnetic north.
- (ii)
- Output variables
- (iii)
- Conditions and restrictions
- (iv)
- Route planner approach
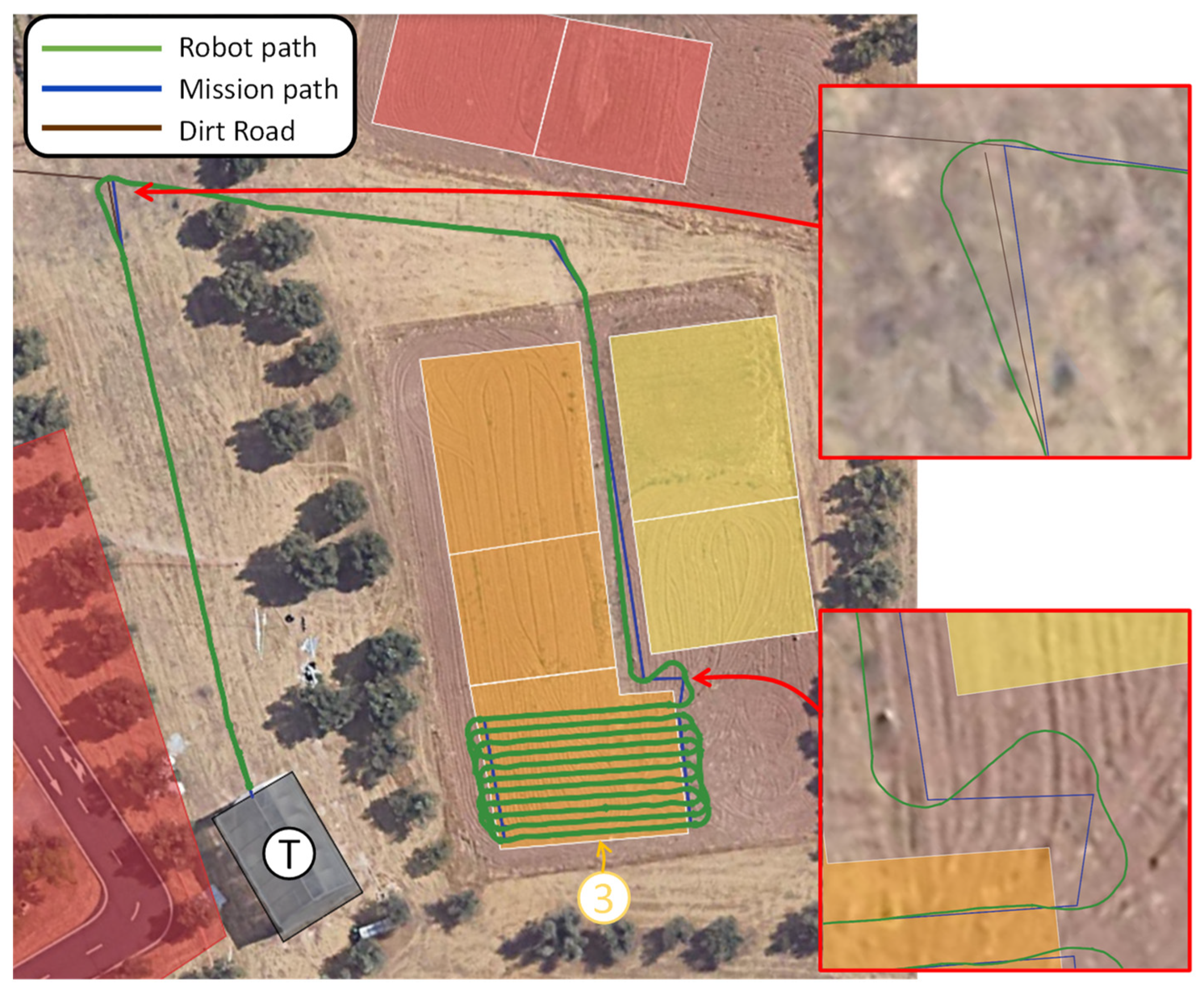
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural robotics for field operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An overview of cooperative robotics in agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Emmi, L.; Fernandez, R.; Gonzalez-de-Santos, P.; Francia, M.; Golfarelli, M.; Vitali, G.; Sandmann, H.; Hustedt, M.; Wollweber, M. Exploiting the Internet Resources for Autonomous Robots in Agriculture. Agriculture 2023, 13, 1005. [Google Scholar] [CrossRef]
- Pedersen, S.M.; Lind, K.M. Precision Agriculture: Technology and Economic Perspectives, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 1–21. [Google Scholar]
- Ding, H.; Zhang, B.; Zhou, J.; Yan, Y.; Tian, G.; Gu, B. Recent developments and applications of simultaneous localization and mapping in agriculture. J. Field Robot. 2022, 39, 956–983. [Google Scholar] [CrossRef]
- Se, S.; Lowe, D.; Little, J. Vision-based mapping with backward correction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Wang, L.K.; Hsieh, S.C.; Hsueh, E.W.; Hsaio, F.B.; Huang, K.Y. Complete pose determination for low altitude unmanned aerial vehicle using stereo vision. In Proceedings of the IEEE/RSJ international conference on intelligent robots and systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Zoto, J.; Musci, M.S.; Khaliq, A.; Chiaberge, M.; Aicardi, I. Automatic path planning for unmanned ground vehicle using UAV imagery. In Advances in Service and Industrial Robotics: Proceedings of the 28th International Conference on Robotics in Alpe-Adria-Danube Region (RAAD 2019), Kaiserslautern, Germany, 19–21 June 2019; Springer: Berlin/Heidelberg, Germany; Cham, Switzerland, 2019. [Google Scholar]
- Nehme, H.; Aubry, C.; Solatges, T.; Savatier, X.; Rossi, R.; Boutteau, R. Lidar-based structure tracking for agricultural robots: Application to autonomous navigation in vineyards. J. Intell. Robot. Syst. 2021, 103, 61. [Google Scholar] [CrossRef]
- Zhang, N.; Taylor, R.K. Applications of a Field–Level Geographic Information System (FIS) in Precision Agriculture. Appl. Eng. Agric. 2001, 17, 885. [Google Scholar] [CrossRef]
- Han, X.; Kim, H.J.; Jeon, C.W.; Moon, H.C.; Kim, J.H.; Seo, I.H. Design and field testing of a polygonal paddy infield path planner for unmanned tillage operations. Comput. Electron. Agric. 2021, 191, 106567. [Google Scholar] [CrossRef]
- Chakraborty, S.; Elangovan, D.; Govindarajan, P.L.; ELnaggar, M.F.; Alrashed, M.M.; Kamel, S. A comprehensive review of path planning for agricultural ground robots. Sustainability 2022, 14, 9156. [Google Scholar] [CrossRef]
- Linker, R.; Blass, T. Path-planning algorithm for vehicles operating in orchards. Biosyst. Eng. 2008, 101, 152–160. [Google Scholar] [CrossRef]
- Santos, L.; dos Santos, F.N.; Mendes, J.; Ferraz, N.; Lima, J.; Morais, R.; Costa, P. Path planning for automatic recharging system for steep-slope vineyard robots. In Proceedings of the Third Iberian Robotics Conference (ROBOT 2017), Seville, Spain, 22–24 November 2017. [Google Scholar]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agric. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.D.; Sørensen, C.G.; Vougioukas, S. An object-oriented model for simulating agricultural in-field machinery activities. Comput. Electron. Agric. 2012, 81, 24–32. [Google Scholar] [CrossRef]
- Shah, D.; Levine, S. Viking: Vision-based kilometer-scale navigation with geographic hints. In Proceedings of the Robotics: Science and Systems (RSS), New York, NY, USA, 27 June–1 July 2022; p. 3. [Google Scholar]
- Thrun, S. Learning metric-topological maps for indoor mobile robot navigation. Artif. Intell. 1998, 99, 21–71. [Google Scholar] [CrossRef]
- Fermin-Leon, L.; Neira, J.; Castellanos, J.A. Incremental contour-based topological segmentation for robot exploration. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2017), Singapore, 29 May–3 June 2017; pp. 2554–2561. [Google Scholar]
- Kuipers, B.; Byun, Y.T. A robot exploration and mapping strategy based on a semantic hierarchy of spatial representations. Robot. Auton. Syst. 1991, 8, 47–63. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.; Galindo, C.; Gonzalez-Jimenez, J. Building Multiversal Semantic Maps for Mobile Robot Operation. Knowl.-Based Syst. 2017, 119, 257–272. [Google Scholar] [CrossRef]
- Koubâa, A. (Ed.) Robot Operating System (ROS); Springer: Cham, Switzerland, 2017. [Google Scholar]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- López-Riquelme, J.A.; Pavón-Pulido, N.; Navarro-Hellín, H.; Soto-Valles, F.; Torres-Sanchez, R. A software architecture based on FIWARE cloud for Precision Agriculture. Agric. Water Manag. 2017, 183, 123–135. [Google Scholar] [CrossRef]
- Smart Agrifood—FIWARE Foundation Open Source Platform. Available online: https://www.fiware.org/community/smart-agrifood/ (accessed on 18 September 2023).
- Emmi, L.; Parra, R.; González-de-Santos, P. Digital representation of smart agricultural environments for robot navigation. In Proceedings of the 10th International Conference on ICT in Agriculture, Food & Environment (HAICTA 2022), Athens, Greece, 22–25 September 2022. [Google Scholar]
- Robotics—Vocabulary (No. ISO 8373:2021). Available online: http://www.springer.com/lncs (accessed on 18 September 2023).
- Vahdanjoo, M.; Sorensen, C.G. Novel route planning method to improve the operational efficiency of capacitated operations. Case: Application of organic fertilizer. AgriEngineering 2021, 3, 458–477. [Google Scholar] [CrossRef]
- Candra, A.; Budiman, M.A.; Hartanto, K. Dijkstra’s and a-star in finding the shortest path: A tutorial. In Proceedings of the 2020 International Conference on Data Science, Artificial Intelligence, and Business Analytics (DATABIA), Medan, Indonesia, 16–17 July 2020. [Google Scholar]
- Siméon, T.; Laumond, J.P.; Nissoux, C. Visibility-based probabilistic roadmaps for motion planning. Adv. Robot. 2000, 14, 477–493. [Google Scholar] [CrossRef]
- Murrieta-Cid, R.; Tovar, B.; Hutchinson, S. A sampling-based motion planning approach to maintain visibility of unpredictable targets. Auton. Robot. 2005, 19, 285–300. [Google Scholar] [CrossRef]
- Rahman, M.S.; Kaykobad, M. On Hamiltonian cycles and Hamiltonian paths. Inf. Process. Lett. 2005, 94, 37–41. [Google Scholar] [CrossRef]
- About Edit GeoJSON. Available online: http://geojson.io/about.html (accessed on 26 October 2023).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Values |
|---|---|
| Type of robot | Autonomous tracked vehicle |
| Steering mechanism | Skid-steer |
| Propulsion system | Motor and batteries |
| Maximum speed | 6 km/h |
| Position accuracy | ±0.015 m |
| Positioning system | GNSS with real-time kinematics (RTK), inertial measurement units (IMU) |
| Dimensions | 1.76 m × 1.5 m × 1.647 m (width × length × height) |
| Distance between tracks | 0.80–2.20 m (adjustable) |
| Minimum distance for crops | 1.48 m |
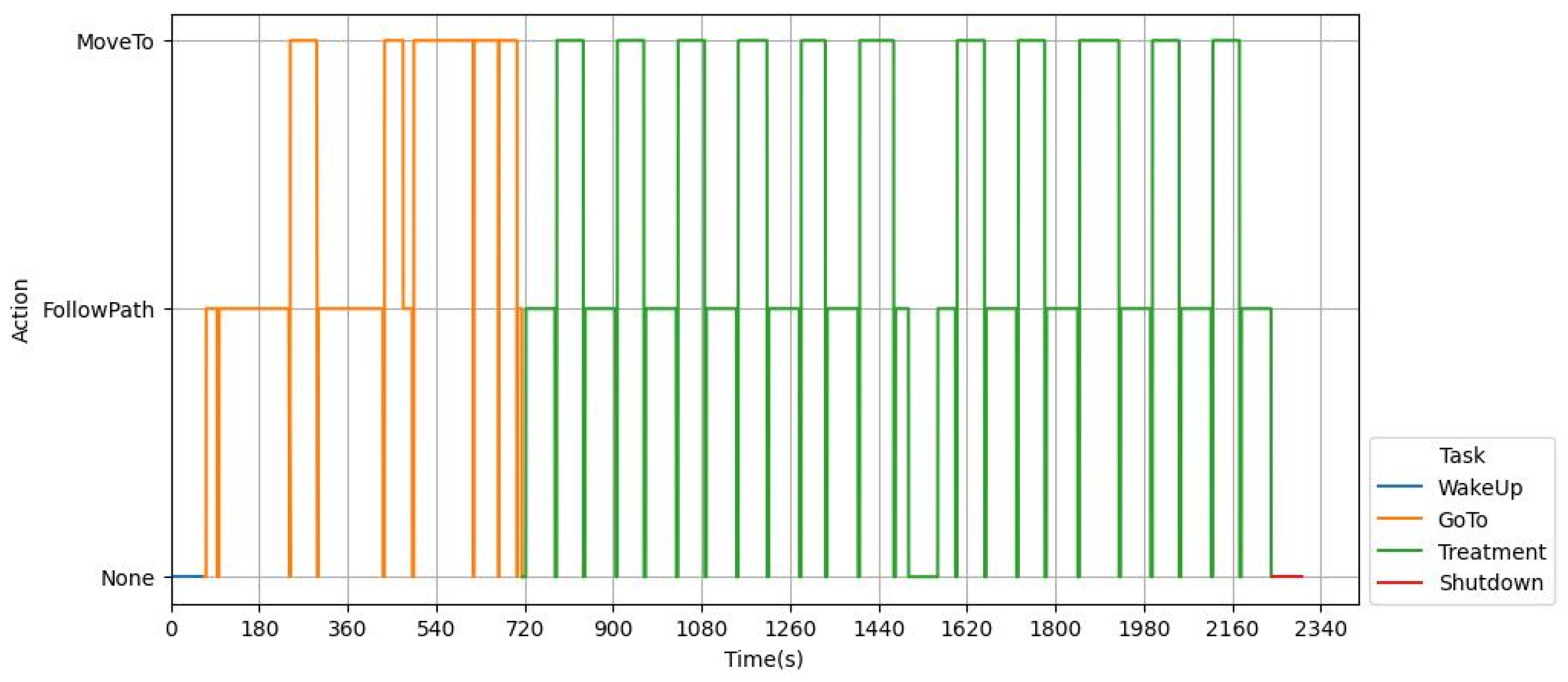
| Operation | Action | Duration [s] | Distance Traveled [m] |
|---|---|---|---|
| Wakeup | None | 66.9 | 8.8 |
| GoTo | MoveTo | 309.5 | 72.2 |
| FollowPath | 324.5 | 126.4 | |
| Treatment | MoveTo | 638.1 | 85.7 |
| FollowPath | 74.1 | 288.1 | |
| None | 146.8 | 0 | |
| Total | 37.11 min | 581.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cordova-Cardenas, R.; Emmi, L.; Gonzalez-de-Santos, P. Enabling Autonomous Navigation on the Farm: A Mission Planner for Agricultural Tasks. Agriculture 2023, 13, 2181. https://doi.org/10.3390/agriculture13122181
Cordova-Cardenas R, Emmi L, Gonzalez-de-Santos P. Enabling Autonomous Navigation on the Farm: A Mission Planner for Agricultural Tasks. Agriculture. 2023; 13(12):2181. https://doi.org/10.3390/agriculture13122181
Chicago/Turabian StyleCordova-Cardenas, Ruth, Luis Emmi, and Pablo Gonzalez-de-Santos. 2023. "Enabling Autonomous Navigation on the Farm: A Mission Planner for Agricultural Tasks" Agriculture 13, no. 12: 2181. https://doi.org/10.3390/agriculture13122181
APA StyleCordova-Cardenas, R., Emmi, L., & Gonzalez-de-Santos, P. (2023). Enabling Autonomous Navigation on the Farm: A Mission Planner for Agricultural Tasks. Agriculture, 13(12), 2181. https://doi.org/10.3390/agriculture13122181