

Stress Simulation on Cam-Type Transplanting Device of Semiautomatic Vegetable Transplanter

Abstract
:1. Introduction
2. Materials and Methods
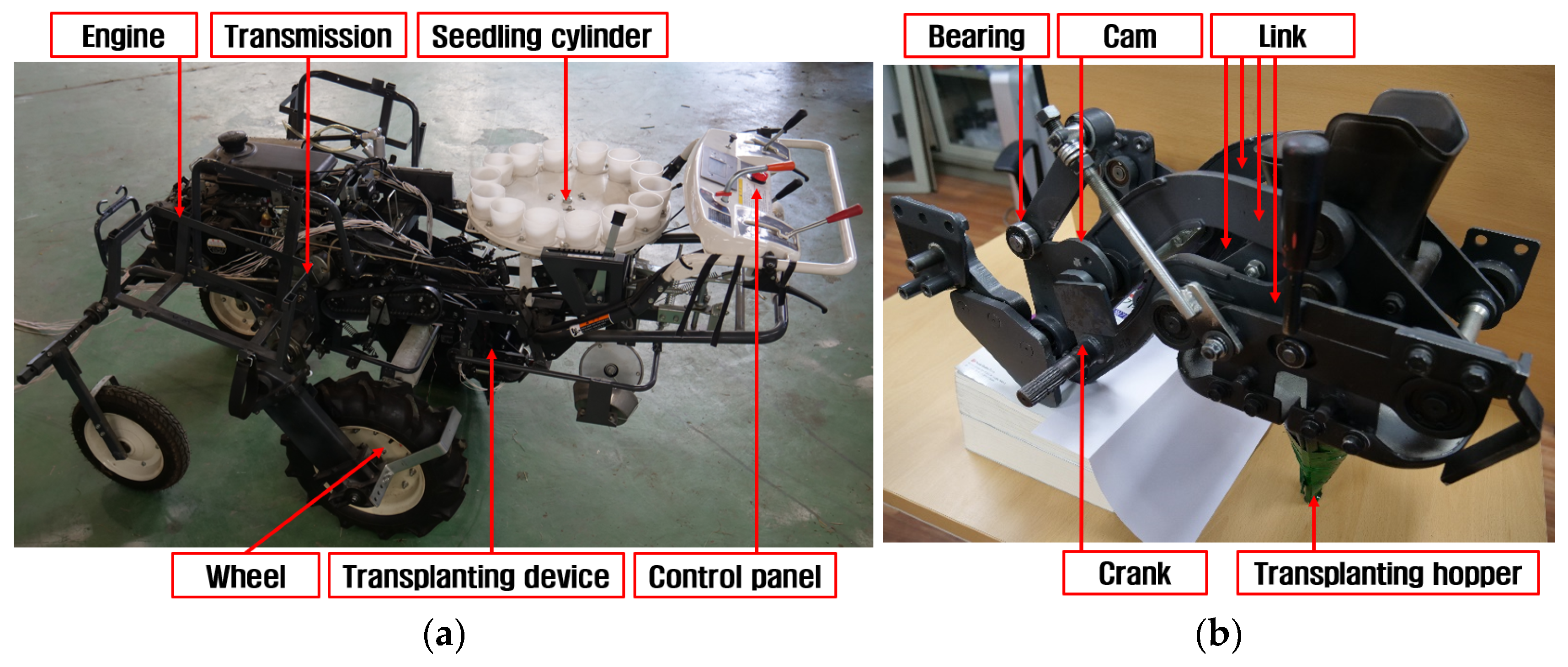
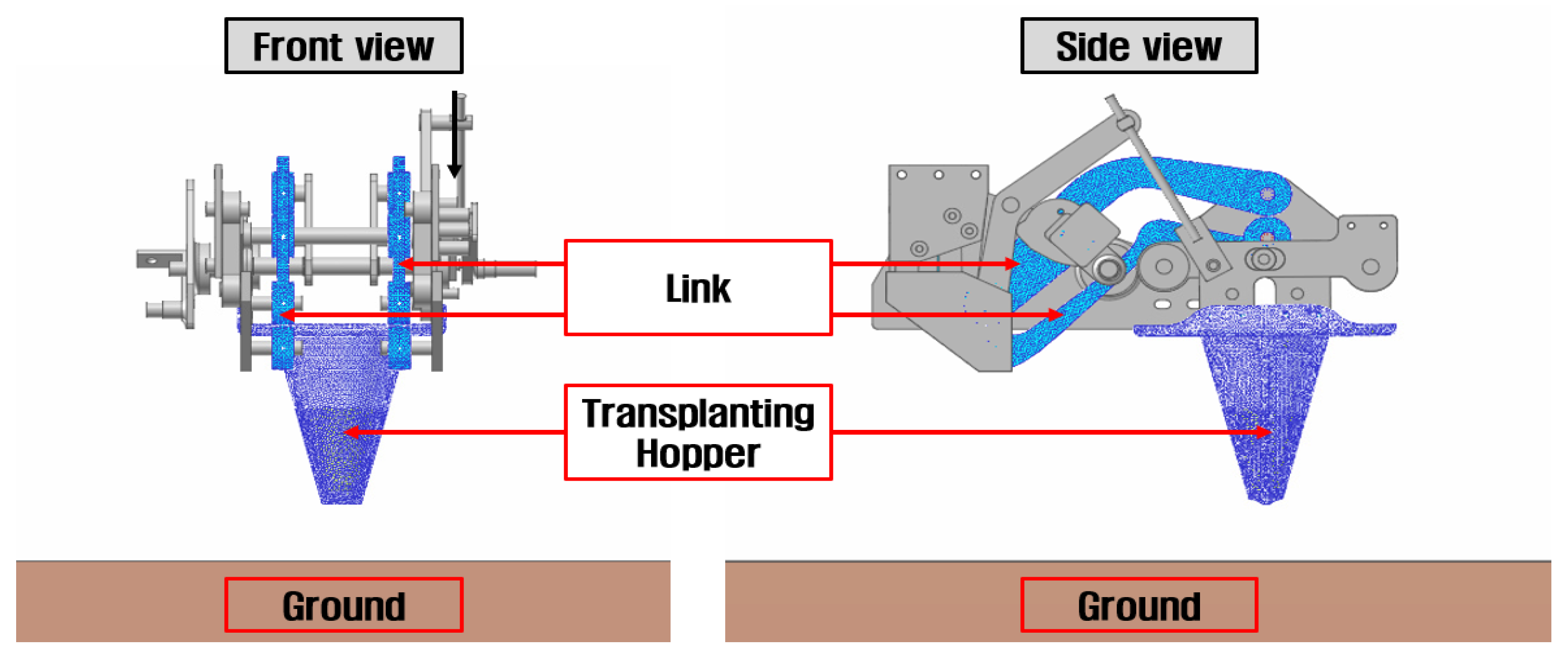
2.1. Transplanting Device of Cam-Type Vegetable Transplanter [7]
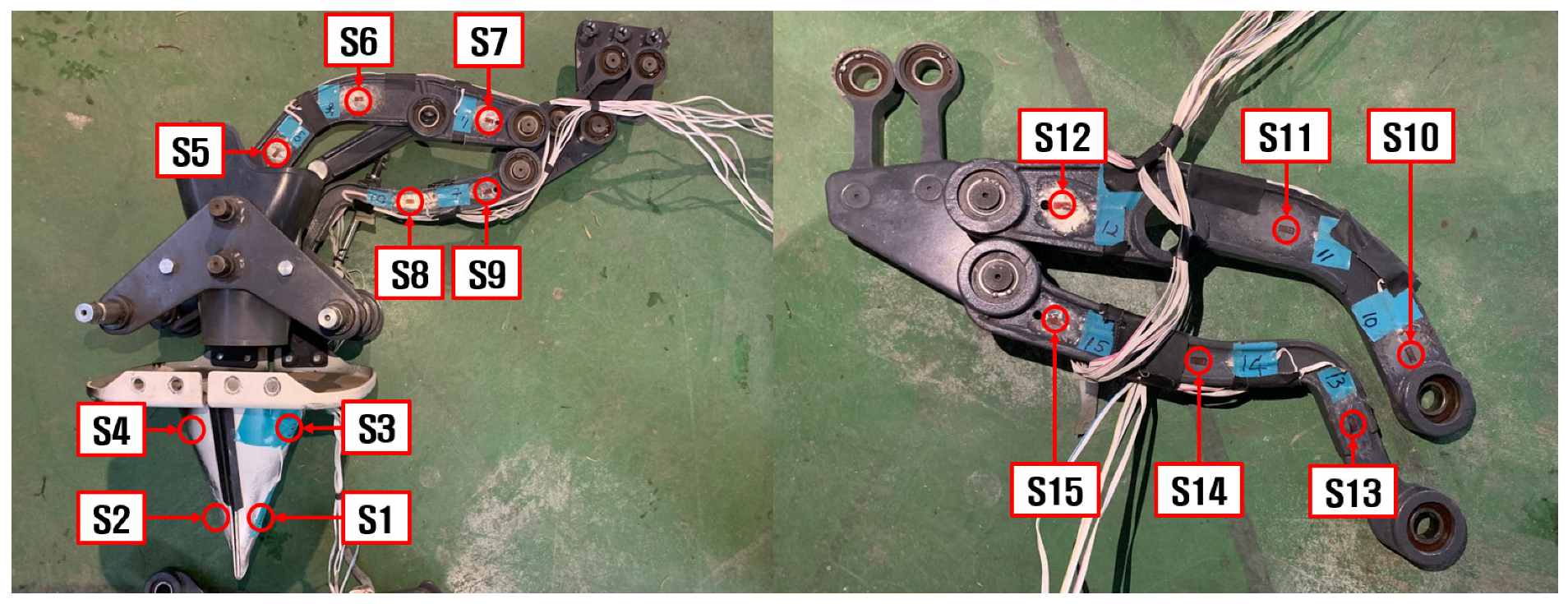
2.2. Stress Measurement
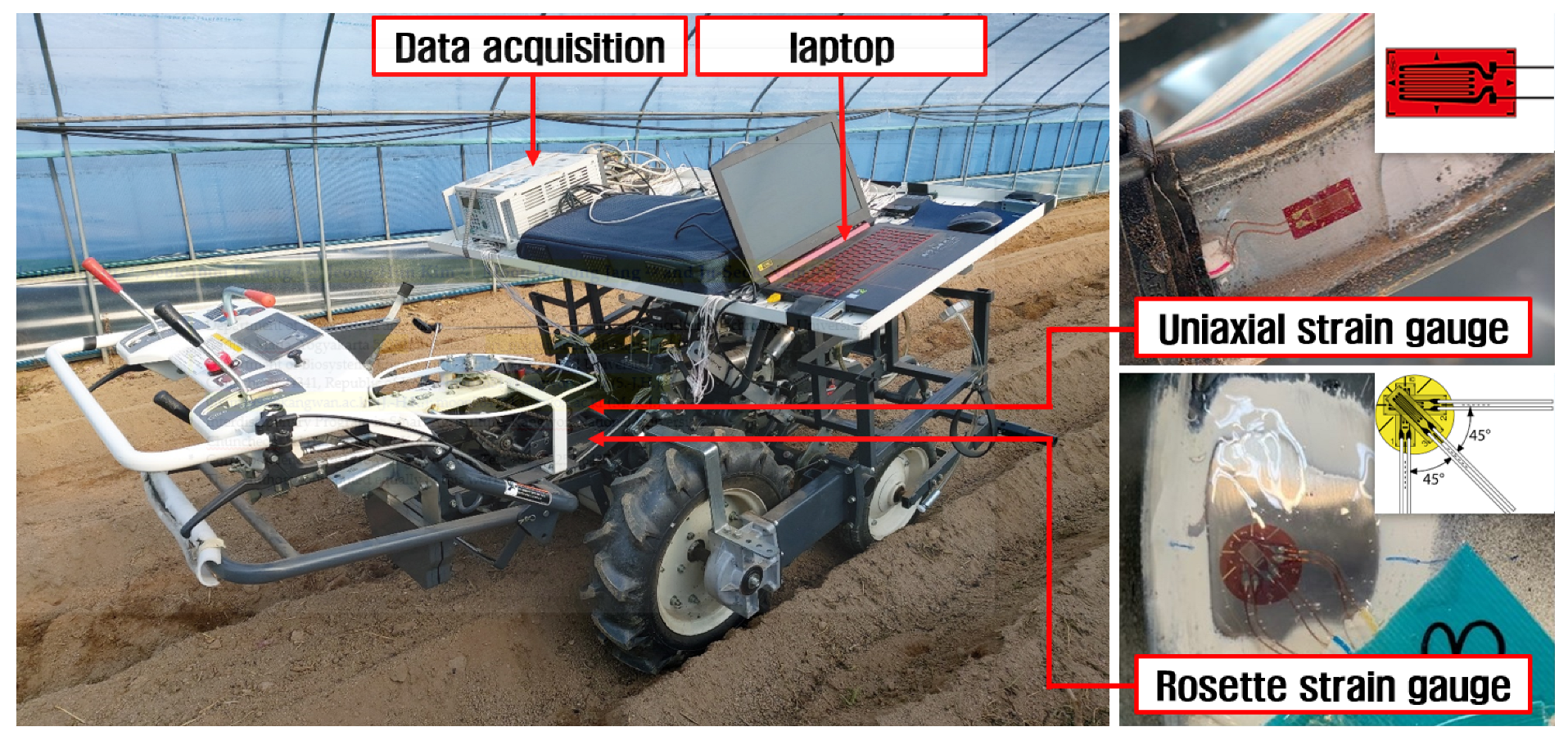
2.2.1. Stress Measurement System
2.2.2. Working Conditions
2.2.3. Analysis Data
2.3. Stress Simulation
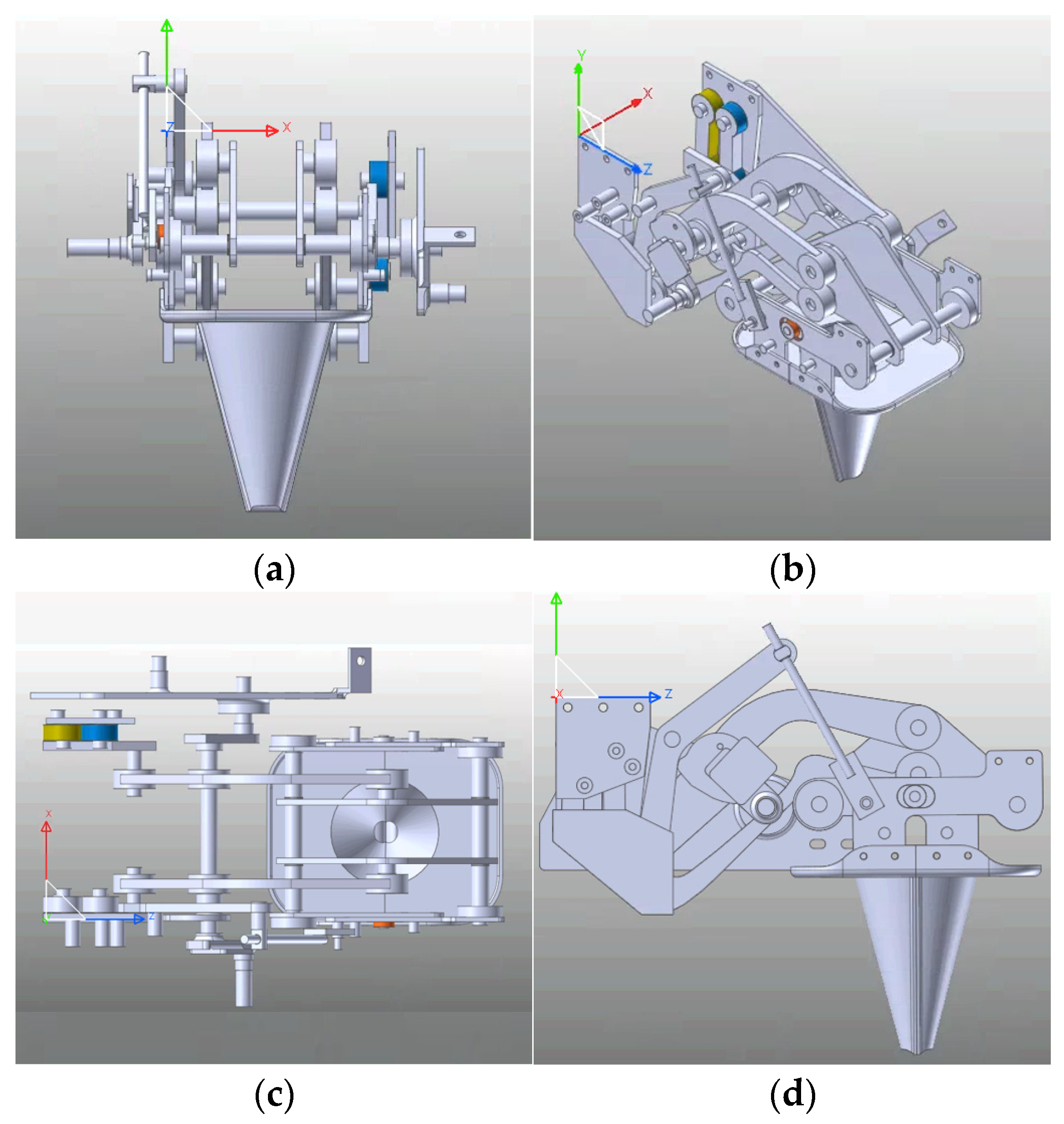
2.3.1. Simulation Model
2.3.2. Simulation Condition
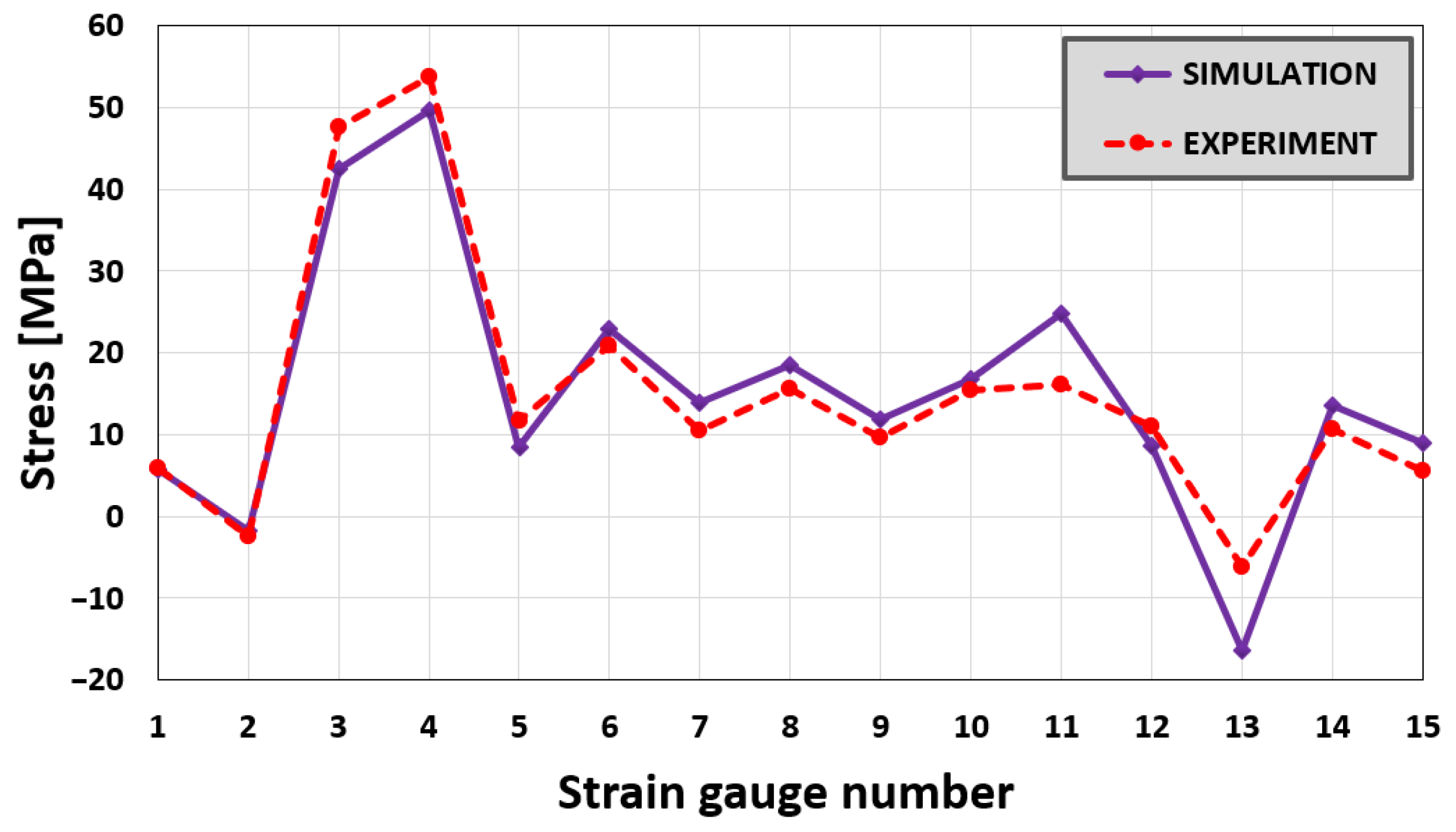
2.3.3. Verification of Stress Simulation
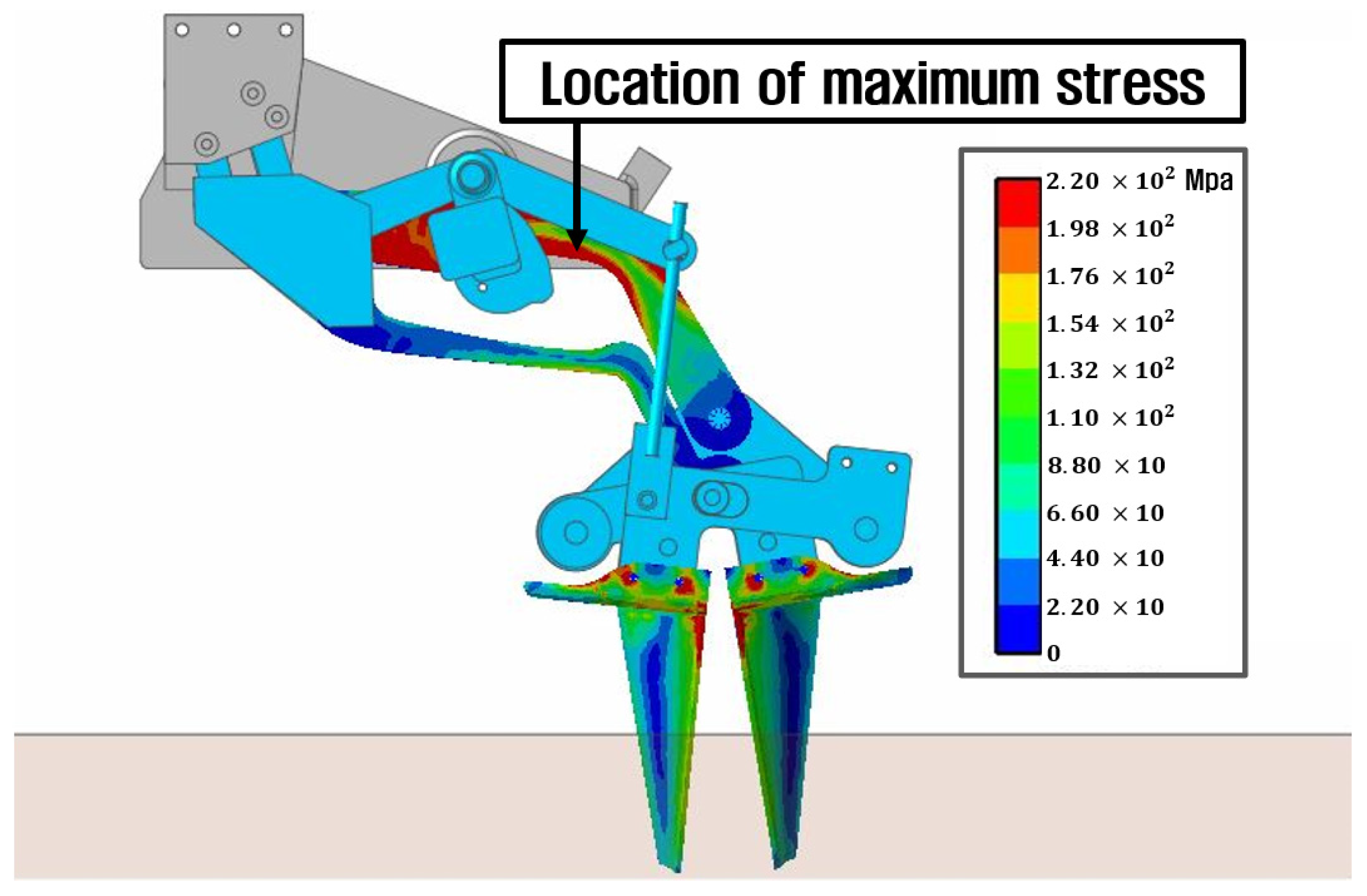
2.3.4. Maximum Stress and Static Safety Factor Based on Simulation
3. Results and Discussion
3.1. Verification of Stress Simulation
3.2. Maximum Stress and Static Safety Factor Based on Simulation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Khadatkar, A.; Mathur, S.M.; Dubey, K.; BhusanaBabu, V. Development of embedded automatic transplanting system in seedling transplanters for precision agriculture. Artif. Intell. Agric. 2021, 5, 175–184. [Google Scholar] [CrossRef]
- Javidan, S.M.; Mohamadzamani, D. Design, construction, and evaluation of automated seeder with ultrasonic sensors for row detection. J. Biosyst. Eng. 2021, 46, 365–374. [Google Scholar] [CrossRef]
- Tian, S.; Qiu, L.; Kondo, N.; Yuan, T. Development of automatic transplanter for plug seedling. IFAC Proc. Vol. 2010, 43, 79–82. [Google Scholar] [CrossRef]
- Moon, S.; Min, Y.; Park, J.-C. Analysis of working capacity of a hand-fed transplanter. J. Bio-Environ. Control 1997, 6, 159–167. [Google Scholar]
- Tsuga, K. Full automatic vegetable transplanter. J. Jpn. Soc. Agric. Mach. 1997, 59, 109–110. [Google Scholar] [CrossRef]
- Min, Y.B.; Kang, J.K.; Ryu, C.S. Development of onion transplanter: Analysis of a transplanting locus on the type of transplanting devices for a vegetable transplanter. J. Agric. Life Sci. 2015, 49, 289–294. [Google Scholar] [CrossRef]
- Kumar, G.V.P.; Raheman, H. Vegetable transplanters for use in developing countries—A review. Int. J. Veg. Sci. 2008, 14, 232–255. [Google Scholar] [CrossRef]
- Park, J.-H.; Hwang, S.-J.; Nam, J.-S. Operational characteristics of a domestic commercial semi-automatic vegetable transplanter. J. Agric. Life Sci. 2018, 52, 127–138. [Google Scholar] [CrossRef]
- Hwang, S.-J.; Park, J.-H.; Lee, J.-Y.; Shim, S.-B.; Nam, J.-S. Optimization of main link lengths of transplanting device of semi-automatic vegetable transplanter. Agronomy 2020, 10, 1938. [Google Scholar] [CrossRef]
- Yang, Q.; Huang, G.; Shi, X.; He, M.; Ahmad, I.; Zhao, X.; Addy, M. Design of a control system for a mini-automatic transplanting machine of plug seedling. Comput. Electron. Agric. 2020, 169, 105226. [Google Scholar] [CrossRef]
- Shao, X.; Song, Z.; Yin, Y.; Xie, B.; Liao, P. Statistical distribution modelling and parameter identification of the dynamic stress spectrum of a tractor front driven axle. Biosyst. Eng. 2021, 205, 152–163. [Google Scholar] [CrossRef]
- Xie, Z.; Shi, W.; Tian, Q.; Zheng, Y.; Tan, L. Fatigue life assessment and damage investigation of centrifugal pump runner. Eng. Fail. Anal. 2021, 124, 105256. [Google Scholar] [CrossRef]
- Siddique, M.A.A.; Kim, W.S.; Baek, S.Y.; Kim, Y.J.; Park, S.U.; Choi, C.H.; Choi, Y.S. Analysis of the axle load of a rice transplanter according to gear selection. J. Drive Control 2020, 17, 125–132. [Google Scholar] [CrossRef]
- Sri, M.; Hwang, S.-J.; Nam, J.-S. Experimental safety analysis for transplanting device of the cam type semi-automatic vegetable transplanter. J. Terramechanics 2022, 103, 19–32. [Google Scholar] [CrossRef]
- Tekeste, M.Z.; Balvanz, L.R.; Hatfield, J.L.; Ghorbani, S. Discrete element modeling of cultivator sweep-to-soil interaction: Worn and hardened edges effects on soil-tool forces and soil flow. J. Terramechanics 2019, 82, 1–11. [Google Scholar] [CrossRef]
- Paulson, I.W.P.; Dolovich, A.T.; Noble, S.D. Development of a dynamic simulation model of a towed seeding implement. J. Terramechanics 2018, 75, 25–35. [Google Scholar] [CrossRef]
- Shao, Y.; Liu, Y.; Xuan, G.; Hu, Z.; Han, X.; Wang, Y.; Chen, B.; Wang, W. Design and test of multifunctional vegetable transplanting machine. IFAC PapersOnLine 2021, 52, 92–97. [Google Scholar] [CrossRef]
- Swe, K.M.; Islam, M.N.; Chowdhury, M.; Ali, M.; Wing, S.; Jun, H.-J.; Lee, S.-H.; Chung, S.-O.; Kim, D.-G. Theoretical analysis of power requirement of a four-row tractor-mounted Chinese cabbage collector. J. Biosyst. Eng. 2021, 46, 139–150. [Google Scholar] [CrossRef]
- Radhakrishnan, V.M. Multiaxial fatigue—An overview. Sadhana 1995, 20, 103–122. [Google Scholar] [CrossRef]
- Paraforos, D.S.; Griepentrog, H.W.; Vougioukas, S.G.; Kortenbruck, D. Fatigue life assessment of a four-rotor swather based on rainflow cycle counting. Biosyst. Eng. 2014, 127, 1–10. [Google Scholar] [CrossRef]
- Juvinall, R.C.; Marshek, K.M. Machine Component Design, 5th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2020; pp. 338–340. [Google Scholar]
- Yurdem, H.; Degirmencioglu, A.; Cakir, E.; Gulsoylu, E. Measurement of strains induced on a three-bottom moldboard plough under load and comparisons with finite element simulations. Measurement 2019, 136, 594–602. [Google Scholar] [CrossRef]
- Plouffe, C.; Laguë, C.; Tessier, S.; Richard, M.J.; McLaughlin, N.B. Moldboard plow performance in a clay soil: Simulations and experiment. Trans. ASAE 1999, 42, 1531–1540. [Google Scholar] [CrossRef]
- Makange, N.R.; Parmar, R.P.; Tiwari, V.K. Stress analysis on tyne of cultivator using finite element method. Trends Biosci. 2015, 8, 3919–3923. [Google Scholar]
- Kešner, A.; Chotěborský, R.; Linda, M.; Hromasová, M.; Katinas, E.; Sutanto, H. Stress distribution on a soil tillage machine frame segment with a chisel shank simulated using discrete element and finite element methods and validate by experiment. Biosyst. Eng. 2021, 209, 125–138. [Google Scholar] [CrossRef]
- Islam, M.N.; Iqbal, M.Z.; Chowdhury, M.; Ali, M.; Shafik, K.; Kabir, M.S.N.; Lee, D.-H.; Chung, S.-O. Stress and fatigue analysis of picking device gears for a 2.6 kW automatic pepper transplanter. Appl. Sci. 2021, 11, 2241. [Google Scholar] [CrossRef]
- Bluff, E. Safety in machinery design and construction: Performance for substantive safety outcomes. Saf. Sci. 2014, 66, 27–35. [Google Scholar] [CrossRef]
- Knabner, D.; Hauschild, S.; Suchý, L.; Vetter, S.; Leidich, E.; Hasse, A. Calculation method for the fail-safe design of steel-steel contacts subject to fretting fatigue based on a worst-case assumption. Int. J. Fatigue 2022, 165, 107217. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item/Parameter | Specification | |
|---|---|---|
| model/manufacturer/country | KP-100KR/KUBOTA/Osaka, Japan | |
| length/width/height (mm) | 2150/1360/1130 | |
| weight (kg) | 280 | |
| engine | rated power (kW) | 2.6 |
| rated speed (rpm) | 1550 | |
| planting distance (mm) | 350–900 | |
| maximum working speed (m/s) | 0.57 | |
| working efficiency (h/m2) | 0.0015–0.0025 | |
| Property | Specification |
|---|---|
| density, ρ (kg/m3) | 7.85 × 103 |
| modulus of elasticity, E (GPa) | 207 |
| Poisson’s ratio, ν | 0.3 |
| yield strength, Sy (MPa) | 210 |
| yield strength in shear, Ssy (MPa) | 105 |
| ultimate strength, Sut (MPa) | 380 |
| fatigue strength of 106 cycles, Sn (MPa) | 190 |
| Item/Parameter | Specification | |
|---|---|---|
| uniaxial strain gauge | model/manufacturer/country | KYOWA KFGS-5-350-C1-11 L10M3R/KYOWA/Tokyo, Japan |
| gauge factor (%) | 2.12 ± 1.0 | |
| gauge length (mm) | 5 | |
| gauge resistance (%) | 351.2 ± 0.4 Ω | |
| rosette strain gauge | model/manufacturer/country | KYOWA KFGS-1-350-D17-11 L5M3S/KYOWA/Tokyo, Japan |
| gauge factor (%) | 2.11 ± 1.0 | |
| gauge length (mm) | 1 | |
| gauge resistance (%) | 350.0 ± 0.7 Ω | |
| Item/Parameter | Specification |
|---|---|
| model/manufacturer/country | TG009E/HBK/Darmstadt, Germany |
| length/width/height (mm) | 177/161/386 |
| weight (kg) | 5 |
| number of channels | 16 |
| sampling rate (Hz) | Up to 320 |
| Parameter | Value | |
|---|---|---|
| Interaction between hopper and ground | Stiffness coefficient | 35 |
| Damping coefficient | 0.03 | |
| Dynamic friction coefficient | 1.0 | |
| Strain Gauge Number | Measured Maximum Stress (MPa) | Maximum Stress Derived via Simulation (MPa) | RMSE |
|---|---|---|---|
| S1 | 5.94 | 5.70 | 4.4274 |
| S2 | −2.47 | −1.84 | |
| S3 | 47.53 | 42.54 | |
| S4 | 53.69 | 49.64 | |
| S5 | 11.75 | 8.38 | |
| S6 | 20.81 | 22.95 | |
| S7 | 10.42 | 13.96 | |
| S8 | 15.68 | 18.53 | |
| S9 | 9.66 | 11.89 | |
| S10 | 15.51 | 16.78 | |
| S11 | 16.04 | 24.85 | |
| S12 | 11.06 | 8.66 | |
| S13 | −6.16 | −16.36 | |
| S14 | 10.65 | 13.48 | |
| S15 | 5.63 | 9.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Markumningsih, S.; Hwang, S.-J.; Kim, J.-H.; Jang, M.-K.; Nam, J.-S. Stress Simulation on Cam-Type Transplanting Device of Semiautomatic Vegetable Transplanter. Agriculture 2023, 13, 2230. https://doi.org/10.3390/agriculture13122230
Markumningsih S, Hwang S-J, Kim J-H, Jang M-K, Nam J-S. Stress Simulation on Cam-Type Transplanting Device of Semiautomatic Vegetable Transplanter. Agriculture. 2023; 13(12):2230. https://doi.org/10.3390/agriculture13122230
Chicago/Turabian StyleMarkumningsih, Sri, Seok-Joon Hwang, Jeong-Hun Kim, Moon-Kyeong Jang, and Ju-Seok Nam. 2023. "Stress Simulation on Cam-Type Transplanting Device of Semiautomatic Vegetable Transplanter" Agriculture 13, no. 12: 2230. https://doi.org/10.3390/agriculture13122230