
Enhancement of Agricultural Materials Separation Efficiency Using a Multi-Purpose Screw Conveyor-Separator

 ,
,  ,
,  , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Theoretical Aspects
- -
- due to the grain mixture motion, two new terms appear, namely: and ;
- -
- due to the separation process, the grain mixture running mass varies along the sieve length.
- -
- values on the right side of the Equation (10);
- -
- values of external periodic disturbances;
- -
- changes in the running mass of the grain mixture transported with simultaneous separation.
2.2. Theoretical Results of Changes over Time of the Screw Oscillations Natural Frequency
2.3. Theoretical Results of Resonance Oscillations’ Impact on the Process of Grain Mixture Transportation with Its Simultaneous Separation
- -
- the impact of the initial value of the oscillations amplitude and the value of periodic disturbance on the amplitude of the transition through resonance is insignificant;
- -
- resonance frequency is getting lower when the angular velocity of the screw rotation is getting higher, and simultaneously the transition through the resonance amplitude is increasing;
- -
- the grain mixture separation process is accompanied by a simultaneous increase in the transition through the resonance amplitude, i.e., the more intensive the separation, the larger the amplitude.
3. Results and Discussion
- -
- for wheat separation:
- -
- for millet separation:
- -
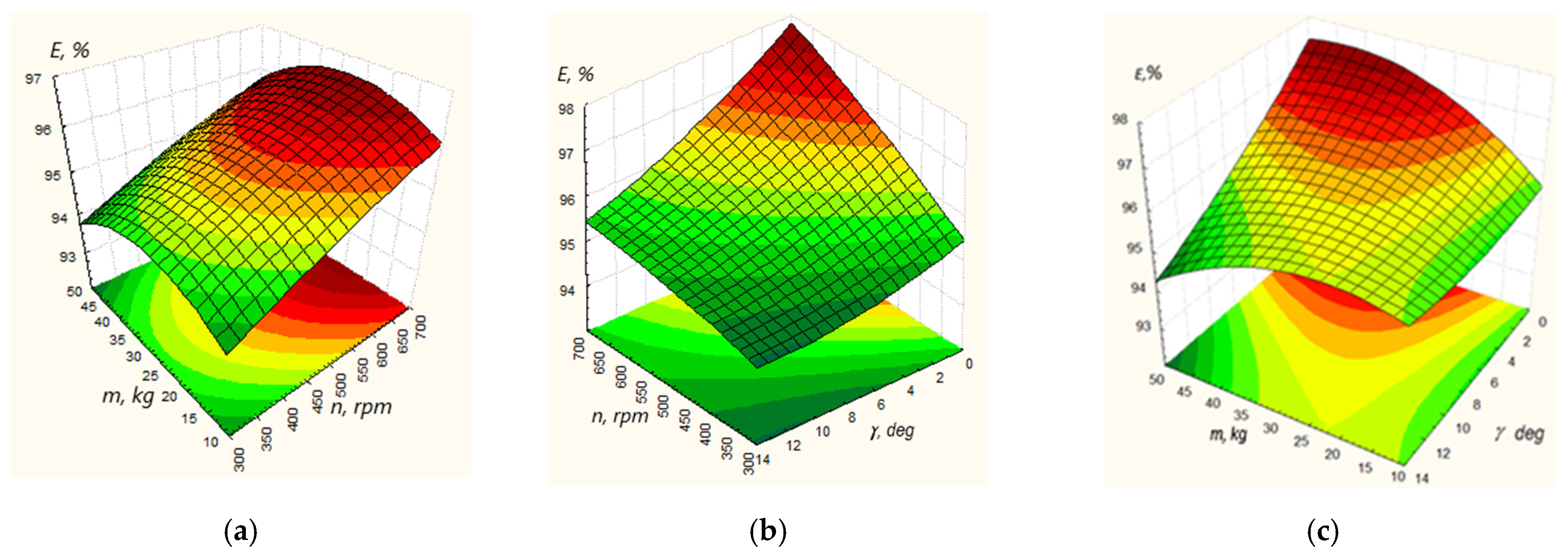
- for wheat separation:Figure 8. The response to a change in the value of surfaces E from the simultaneous change of two factors for wheat is (a)—E = f(m,n); (b)—E = f(n,γ); and (c)—E = f(m,γ)Figure 8. The response to a change in the value of surfaces E from the simultaneous change of two factors for wheat is (a)—E = f(m,n); (b)—E = f(n,γ); and (c)—E = f(m,γ)

- -
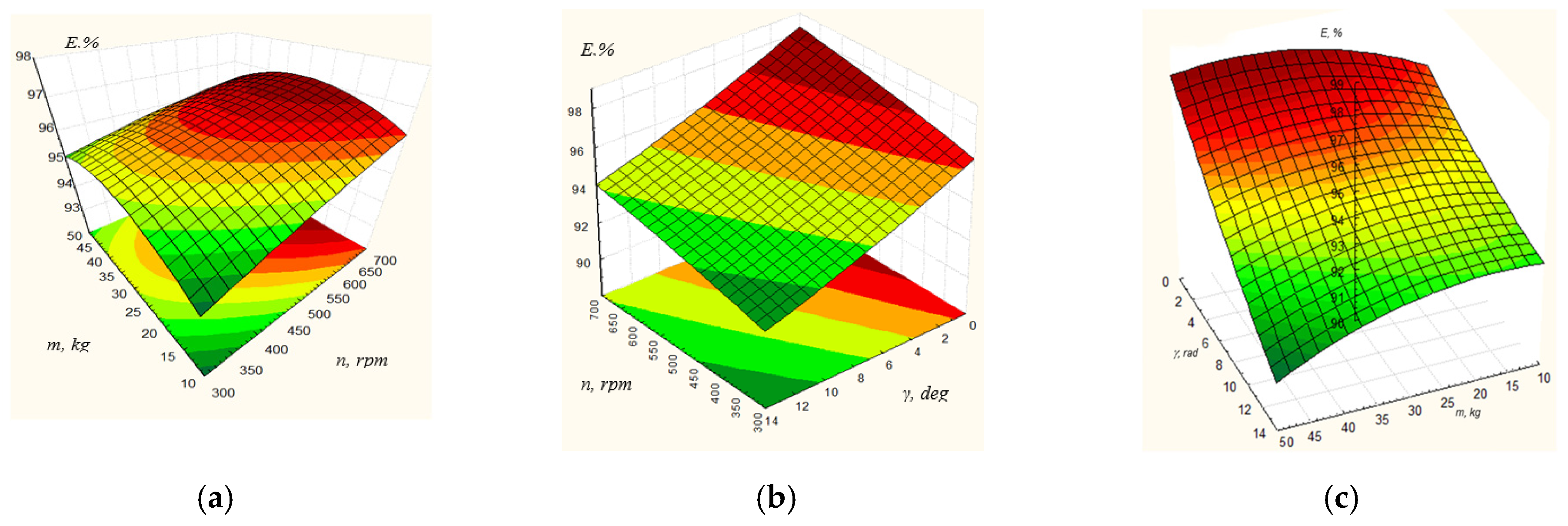
- for millet separation:Figure 9. The response to a change in the value of surfaces from the simultaneous change of two factors for millet is (a) —E = f(m,n); (b)—E = f(n,γ); and (c)—E = f(m,γ).Figure 9. The response to a change in the value of surfaces from the simultaneous change of two factors for millet is (a) —E = f(m,n); (b)—E = f(n,γ); and (c)—E = f(m,γ).



4. Conclusions
- -
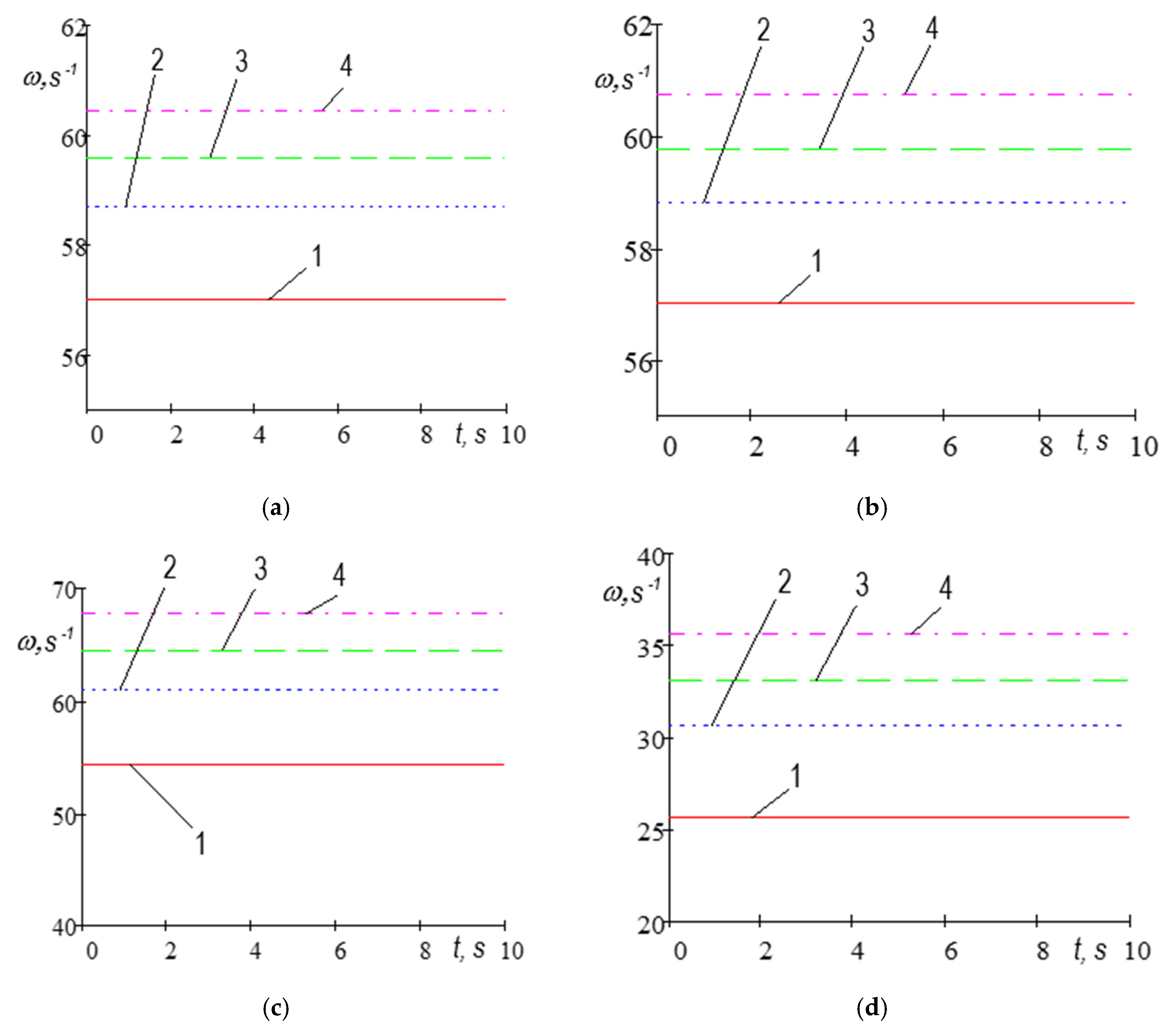
- the higher the angular velocity of the screw rotation, the lower the natural frequency of its bending vibrations (without taking into account the process of separation);
- -
- longitudinal movement of the grain mixture along the worm screw reduces its natural frequency of vibrations (without taking into account the process of separation);
- -
- the process of transportation of a grain mixture with its separation increases its natural vibration frequency, i.e., the more intensive the separation process, the higher the natural frequency;
- -
- the higher value of the grain mixture mass per unit length, the lower the natural frequency of its bending vibrations.
- -
- makes an impact on the vibration amplitude and the values of periodic disturbance and transition through the resonance amplitude, though this impact is insignificant;
- -
- the resonance frequency decreases while the angular velocity of the screw rotation increases, whereas the transition through the resonance amplitude is increased;
- -
- the process of grain mixture transportation with its simultaneous separation is accompanied by an increased amplitude of passing through resonance, which, in this way, makes the separation process more intensive. Thus, at the coefficient of separation k = 0.15, the angular velocity of screw rotation Ω = 20 s−1, linear masses of the screw and the grain mixture, respectively, kg/m; kg/m the resonance amplitude of oscillations of the screw of length l = 6 m is 13% larger than at the coefficient of separation k = 0.1.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aulin, V.; Lyashuk, O.; Tykhyi, A.; Karpushyn, S.; Denysiuk, N. Influence of rheological properties of a soil layer adjacent to the working body cutting element on the mechanism of soil cultivation. Acta Technol. Agric. 2018, 21, 153–159. [Google Scholar] [CrossRef]
- Aulin, V.; Chernovol, M.I.; Pankov, A.O.; Zamota, T.M.; Panayotov, K.K. Sowing machines and systems based on the elements of fluidics. Agric. Eng. 2017, 53, 21–28. [Google Scholar]
- Didukh, V.; Yaheliuk, S.; Artyukh, T.; Albota, D.; Holiy, O. Decrease of elastic properties of oleanginous flax residues by decortication. Agric. Eng. 2022, 67, 285–292. [Google Scholar] [CrossRef]
- Yaheliuk, S.; Didukh, V.; Busnyuk, V.; Boyko, G.; Shubalyi, O. Optimization on efficient combustion process of small-sized fuel rolls made of oleaginous flax residues. Agric. Eng. 2020, 62, 361–368. [Google Scholar] [CrossRef]
- Pihnastyi, O.; Khodusov, V. Optimal control problem for a conveyor-type production line. Cybern. Syst. Anal. 2018, 54, 744–753. [Google Scholar] [CrossRef]
- Merritt, A.S. Mechanics of tunnelling machine screw conveyors: A theoretical model. Geotechnique 2008, 58, 79–94. [Google Scholar] [CrossRef]
- Mondal, D. Study on filling factor of short length screw conveyor with flood-feeding condition. Mater. Today Proc. 2018, 5, 1286–1291. [Google Scholar] [CrossRef]
- Mondal, D. A short spiral conveyor using cut flight screw with two different trough cover of different height—A comparative study. Techno Societal 2020, 2, 695–703. [Google Scholar] [CrossRef]
- Mondal, D. Design consideration of a laboratory size screw conveyor with variable speed for experimentation purpose—A methodological approach. Techno Societal 2020, 2, 705–715. [Google Scholar] [CrossRef]
- Mondal, D. Case study related to volumetric capacity, mass flow rate and filling factor against a constant trough height as 180 mm for a screw feeder with continuous screw. Techno Societal 2020, 2, 715–723. [Google Scholar] [CrossRef]
- Lyashuk, O.; Vovk, Y.; Sokil, B.; Klendii, V.; Ivasechko, R.; Dovbush, T. Mathematical model of a dynamic process of transporting a bulk material by means of a tube scraping conveyor. Agric. Eng. Int. CIGR J. 2019, 21, 74–81. [Google Scholar]
- Rohatynskyi, R.M.; Hevko, B.; Diachun, A.Ye. The research of the torsional vibrations of the screw in terms of impulsive force impacts. Nauk. Visnyk. Natsionalnoho. Hirnychoho. Universytetu. 2015, 149, 64–68. [Google Scholar]
- Lyashuk, O.L.; Sokil, M.B.; Klendiy, V.M.; Skyba, O.P.; Tretiakov, O.L.; Slobodian, L.M.; Slobodian, N.O. Mathematical model of bending vibrations of a horizontal feeder-mixer along the flow of grain mixture. Agric. Eng. 2018, 55, 35–45. [Google Scholar]
- Hevko, B.; Lyashuk, O.; Sokil, M.; Skyba, O.; Marunych, O.; Shmatko, D. Dynamics of auger working body of a multifunctional conveyor. Bull. Karaganda Univ. Ser. 2018, 1, 105–113. [Google Scholar] [CrossRef]
- Hevko, B.M.; Hevko, R.B.; Klendii, O.M.; Buriak, M.V.; Dzyadykevych, Y.V.; Rozum, R.I. Improvement of machine safety devices. Acta Polytechnica. J. Adv. Eng. 2018, 58, 17–25. [Google Scholar] [CrossRef]
- Hevko, R.B.; Strishenets, O.M.; Lyashuk, O.L.; Tkachenko, I.; Klendii, O.M.; Dzyura, V. Development of a pneumatic screw conveyor design and substantiation of its parameters. Agric. Eng. 2017, 54, 153–160. [Google Scholar]
- Hevko, R.; Rohatynskyi, R.; Hevko, M.; Lyashuk, O.; Trokhaniak, O. Investigation of sectional operating elements for conveying agricultural materials. Res. Agric. Eng. 2020, 66, 18–26. [Google Scholar] [CrossRef]
- Zaica, Al.; Vișan, A.; Păun, A.; Găgeanu, P.; Bunduchi, G.; Zaica, A.; Ștefan, V.; Manea, D. The coating process of corn grains using a treatment machine with brush screw conveyor. Actual Tasks Agric. Eng. 2016, 44, 333–345. [Google Scholar]
- Rogatynsky, R.M.; Hevko, I.B.; Dyachun, A.E. Scientific and Applied Foundations of Creation of Screw Transport and Technological Mechanisms; Publishing Ivan Pulyuy TNTU: Ternopil, Ukraine, 2014; p. 280. Available online: http://elartu.tntu.edu.ua/handle/lib/20806 (accessed on 13 March 2023).
- Hevko, R.B.; Liubin, M.V.; Tokarchuk, O.A.; Lyashuk, O.L.; Pohrishchuk, B.V.; Klendii, O.M. Determination of the parameters of transporting and mixing feed mixtures along the curvilinear paths of tubular conveyors. Agric. Eng. 2018, 55, 97–104. [Google Scholar]
- Yu, W.; Zhang, K.; Li, D.; Zou, D.; Zhang, S. Numerical modeling of concrete conveying capacity of screw conveyor based on DEM. Powder Technol. 2022, 29, 361–374. [Google Scholar] [CrossRef]
- Bulgakov, V.; Pascuzzi, S.; Adamchuck, V.; Olt, J.; Ruzhylo, Z.; Trokhnaniak, O.; Santoro, F.; Arak, M.; Nowak, J.; Beloev, H. Research into power and load parameters of flexible screw conveyors for transportation of agricultural materials. In Farm Machinery and Processes Management in Sustainable Agriculture; Springer International Publishing: Cham, Germany, 2023; Volume 289, pp. 61–75. [Google Scholar] [CrossRef]
- Bulgakov, V.; Trokhnaniak, O.; Adamchuck, V.; Chernovol, M.; Korenko, M.; Dukulis, I.; Ivanovs, S. A study of dynamic loads of a flexible sectional screw conveyor. Acta Technol. Agric. 2022, 25, 131–136. [Google Scholar] [CrossRef]
- Zareiforoush, H.; Komarizadeh, M.H.; Alizadeh M.R., A. Review on screw conveyors performance evaluation during handling process. J. Sci. Rev. 2010, 2, 55–63. [Google Scholar]
- Moorthi, S.; Megaraj, M.; Nagarajan, L.; Karthick, A.; Bharani, M.; Patil, P.P. Dynamic analysis and fabrication of single screw conveyor machine. Adv. Mater. Sci. Eng. 2022, 10, 1–10. [Google Scholar] [CrossRef]
- Lyashuk, O.; Sokil, M.; Vovk, Y.; Levkovych, M.; Tson, O.; Kondratyuk, D.; Dmytrenko, V. Analysis of resonance oscillations of extruder elastic screw conveyor. Int. J. Eng. Res. Africa. 2019, 43, 49–58. [Google Scholar] [CrossRef]
- Lyashuk, O.L. The study on nonlinear model of dynamics of a system ‘extruder elastic auger working body’. Acta Technol. Agric. 2016, 4, 102–107. [Google Scholar] [CrossRef]
- Sokil, B.I.; Sokil, M.B. Forced oscillations of flexible tubular bodies, along which a continuous flow of medium moves. Bull. Natl. Univ. Lviv. Polytech. Dyn. Strength Sesign Mach. Instrum. 2017, 866, 60–65. [Google Scholar]
- Lyashuk, O.; Sokil, M.; Vovk, Y.; Tson, A.; Gupka, A.; Marunych, O. Torsional oscillations of an auger multifunctional conveyor’s screw working body with consideration of the dynamics of a processed medium continuous flow. Ukr. Food J. 2018, 7, 499–510. [Google Scholar] [CrossRef]
- Lyashuk, O.L.; Hevko, I.B.; Hud, V.Z.; Tkachenko, I.G.; Hevko, O.V.; Sokol, M.O.; Tson, O.P.; Kobelnyk, V.R.; Shmatko, D.Z.; Stanko, A.I. Research of non-resonant oscillations of the telescopic screw—Fluid medium system. Agric. Eng. 2022, 68, 499–510. [Google Scholar] [CrossRef]
- Hevko, I.B.; Hud, V.Z.; Lyashuk, O.L.; Hevko, O.M.; Shust, I.M. Research of resonance vibrations of the system “telescopic screw is a bulk media” condited by tortial vibrations. Karaganda Univ. Phys. Ser. 2020, 2, 119–126. [Google Scholar]
- Hud, V.Z.; Rohatynsky, R.M.; Hevko, I.B.; Lyashuk, O.L.; Pik, A.I.; Huryk, O.Y. The research of the resonant oscillations of the system telescopic screw is a bulk environment caused by external periodic forces. Agric. Eng. 2020, 60, 29–39. [Google Scholar] [CrossRef]
- Hevko, I.; Lyashuk, O.; Sokil, M.; Slobodian, L.; Hud, V.; Vovk, Yu. Resonant oscillation of vertical working part of conveyer-loader. Bull. Karaganda Univ. Phys. Ser. 2019, 2, 73–82. [Google Scholar] [CrossRef] [PubMed]
- Panasiewicz, M. Analysis of the pneumatic separation process of agricultural materials. Int. Agrophysics 1999, 13, 233–239. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coef. | b0 | b1 | b2 | b3 | b12 | b13 | b23 | b11 | b22 | b33 |
|---|---|---|---|---|---|---|---|---|---|---|
| wwheat | 91.376 | 5.8 × 10−3 | 0.167 | 0.4257 | 1.5 × 10−4 | 6 × 10−4 | −0.0071 | 0.14 × 10−5 | −6.9 × 10−4 | 0.011 |
| millet | 93.071 | 0.0033 | 0.167 | 0.214 | −1.9 × 10−10 | −7.1 × 10−4 | −7.1 × 10−3 | 0.64 × 10−9 | 0.21 × 10−3 | 0.0034 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hud, V.; Lyashuk, O.; Hevko, I.; Ungureanu, N.; Vlăduț, N.-V.; Stashkiv, M.; Hevko, O.; Pik, A. Enhancement of Agricultural Materials Separation Efficiency Using a Multi-Purpose Screw Conveyor-Separator. Agriculture 2023, 13, 870. https://doi.org/10.3390/agriculture13040870
Hud V, Lyashuk O, Hevko I, Ungureanu N, Vlăduț N-V, Stashkiv M, Hevko O, Pik A. Enhancement of Agricultural Materials Separation Efficiency Using a Multi-Purpose Screw Conveyor-Separator. Agriculture. 2023; 13(4):870. https://doi.org/10.3390/agriculture13040870
Chicago/Turabian StyleHud, Victor, Oleg Lyashuk, Ivan Hevko, Nicoleta Ungureanu, Nicolae-Valentin Vlăduț, Mykola Stashkiv, Olena Hevko, and Andriy Pik. 2023. "Enhancement of Agricultural Materials Separation Efficiency Using a Multi-Purpose Screw Conveyor-Separator" Agriculture 13, no. 4: 870. https://doi.org/10.3390/agriculture13040870
APA StyleHud, V., Lyashuk, O., Hevko, I., Ungureanu, N., Vlăduț, N.-V., Stashkiv, M., Hevko, O., & Pik, A. (2023). Enhancement of Agricultural Materials Separation Efficiency Using a Multi-Purpose Screw Conveyor-Separator. Agriculture, 13(4), 870. https://doi.org/10.3390/agriculture13040870