
A Vibration Reduction Control Method for Tractor Rear Hydraulic Hitch Based on Pressure Feedback
Abstract
:1. Introduction
2. Mathematical Model of the Hydraulic Hitch System
2.1. Kinematic Analysis of Linkage
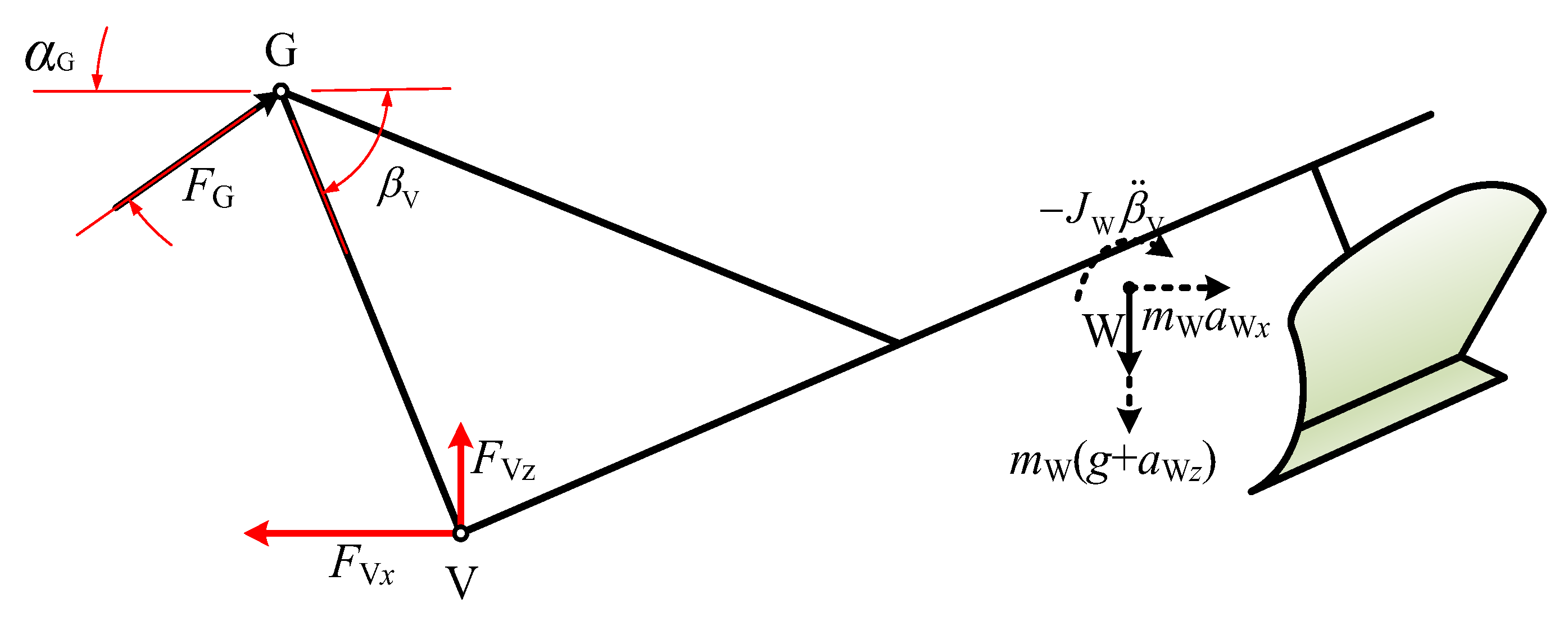
2.2. Dynamic Analysis of the Hitch System
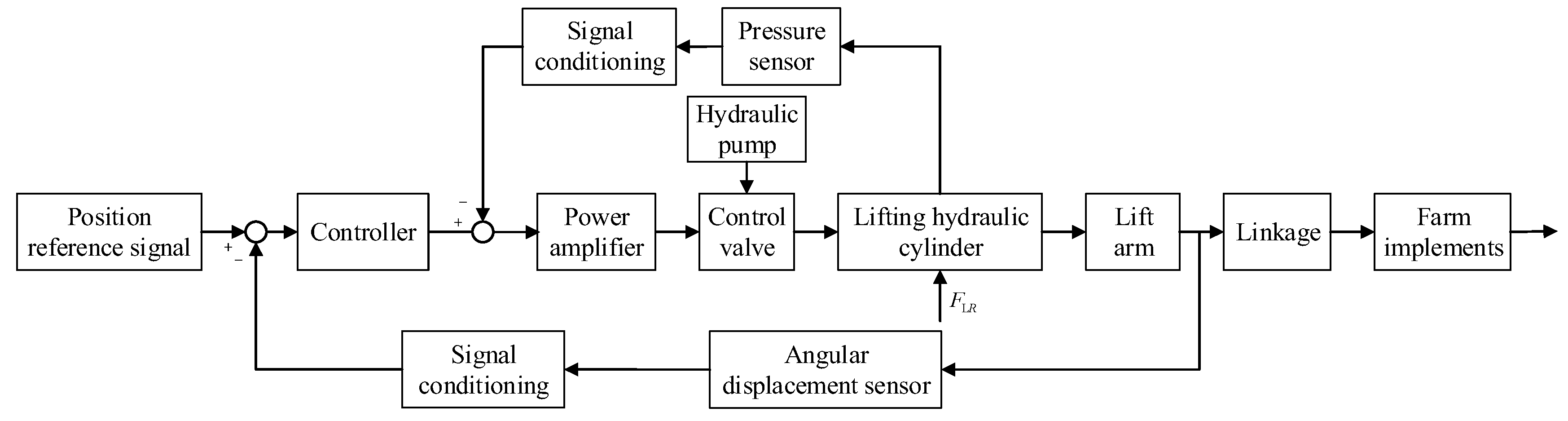
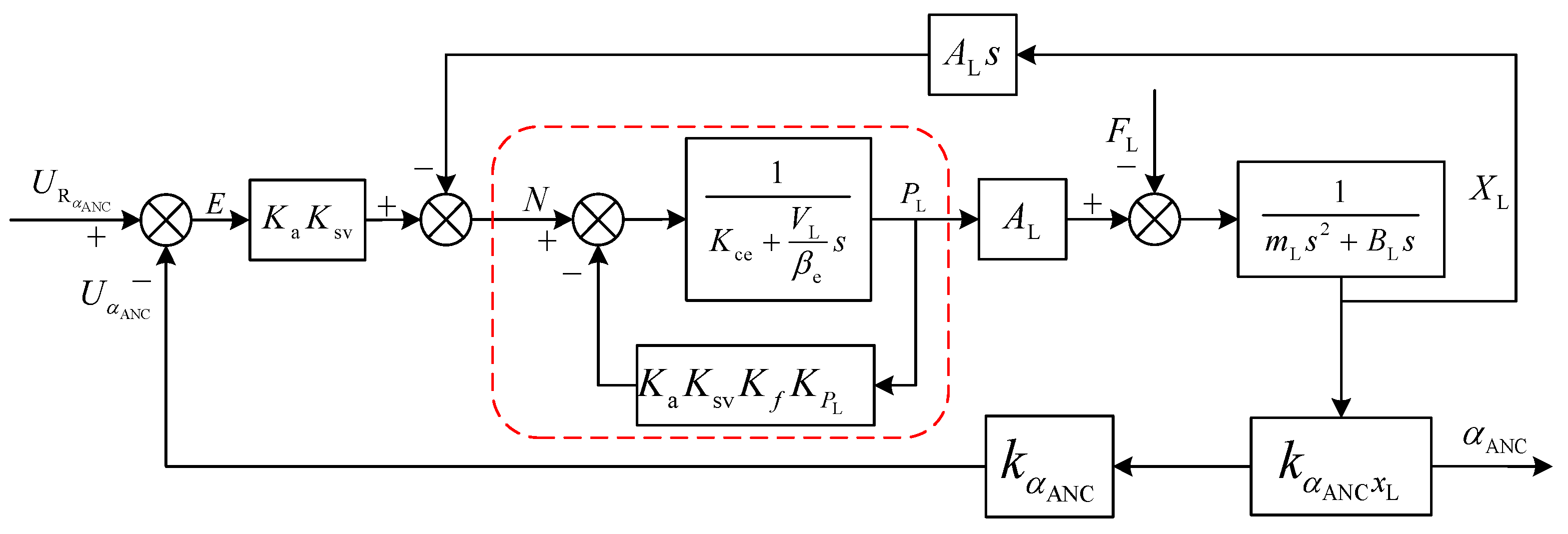
3. Design of Pressure Feedback Correction Link
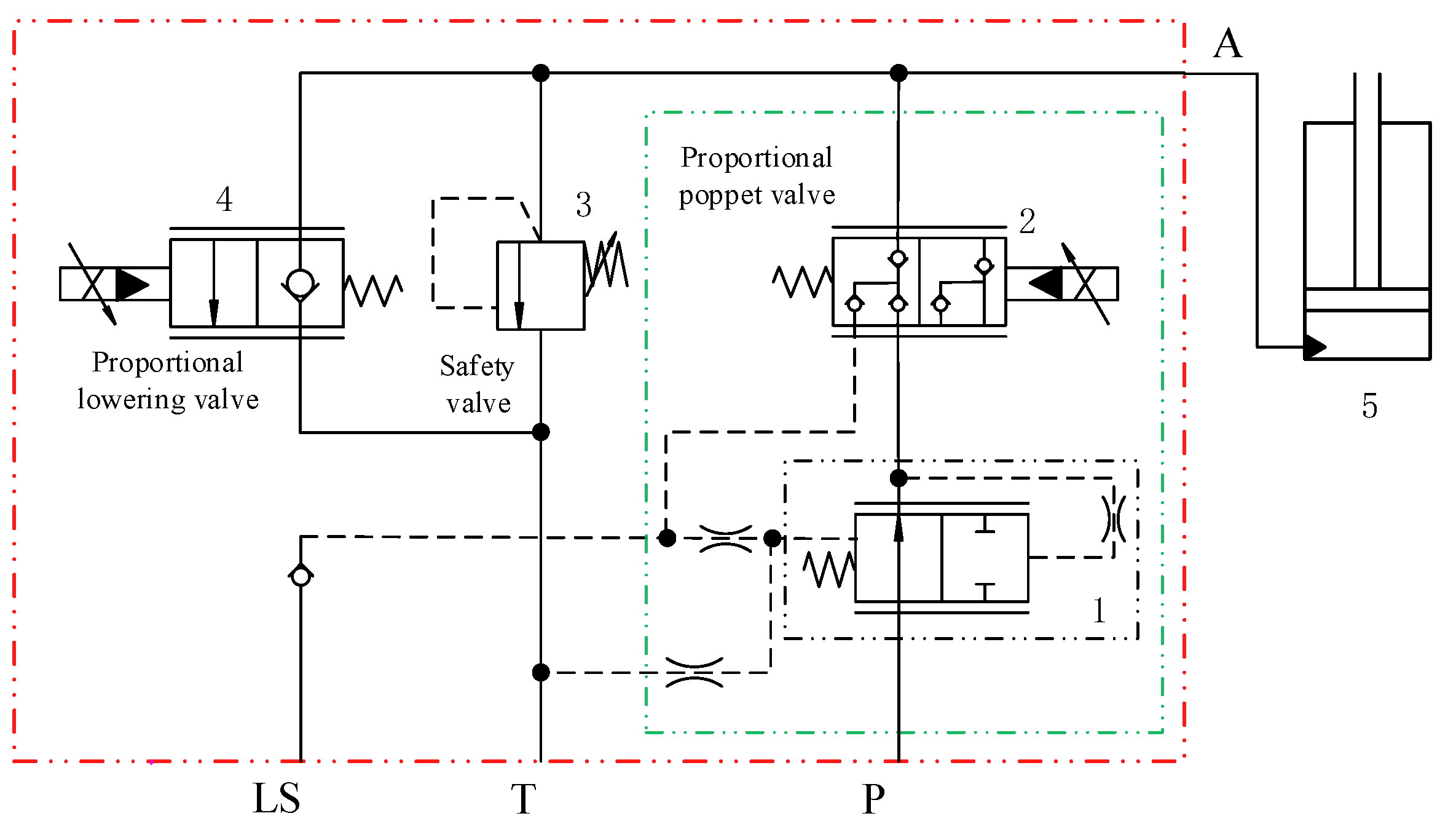
3.1. Nonlinear Mathematical Model of Hydraulic System
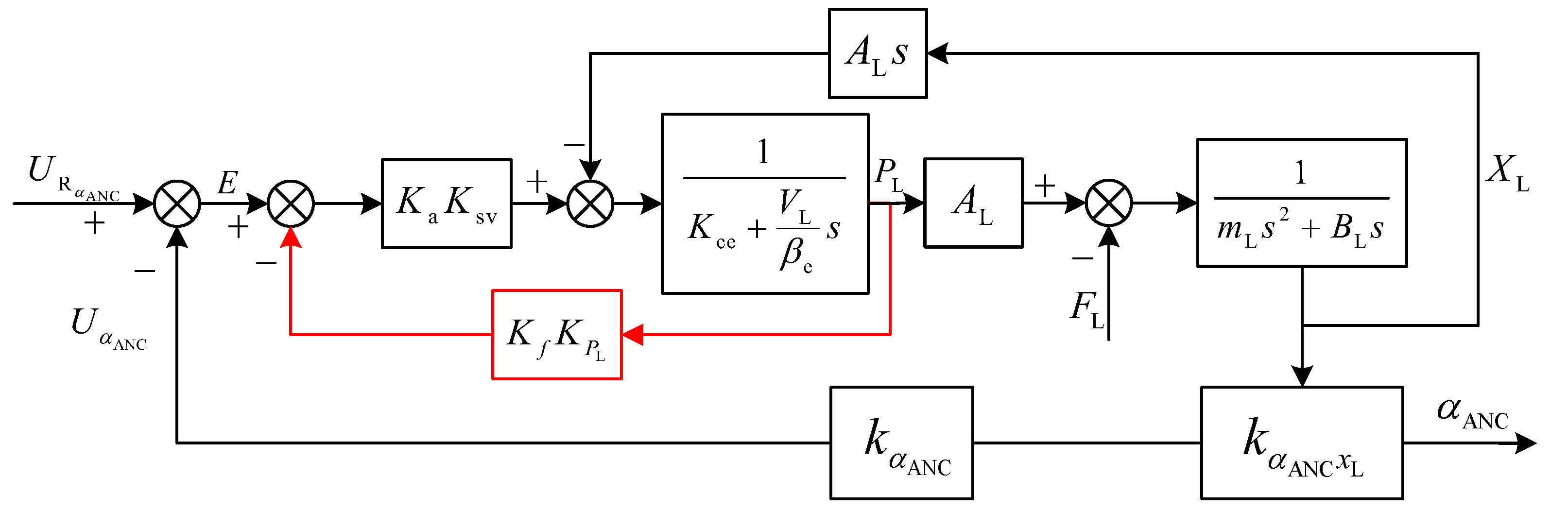
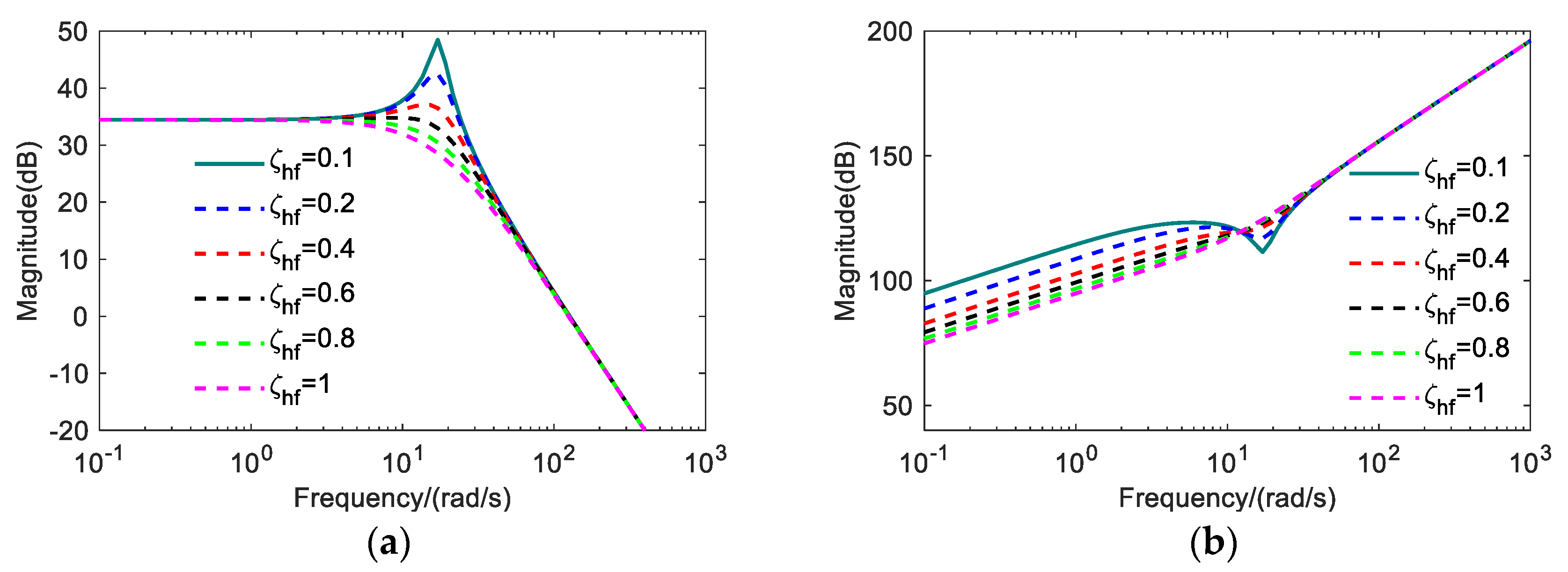
3.2. Calculation and Analysis of Pressure Feedback Correction
4. Real Tractor Test and Result Analysis
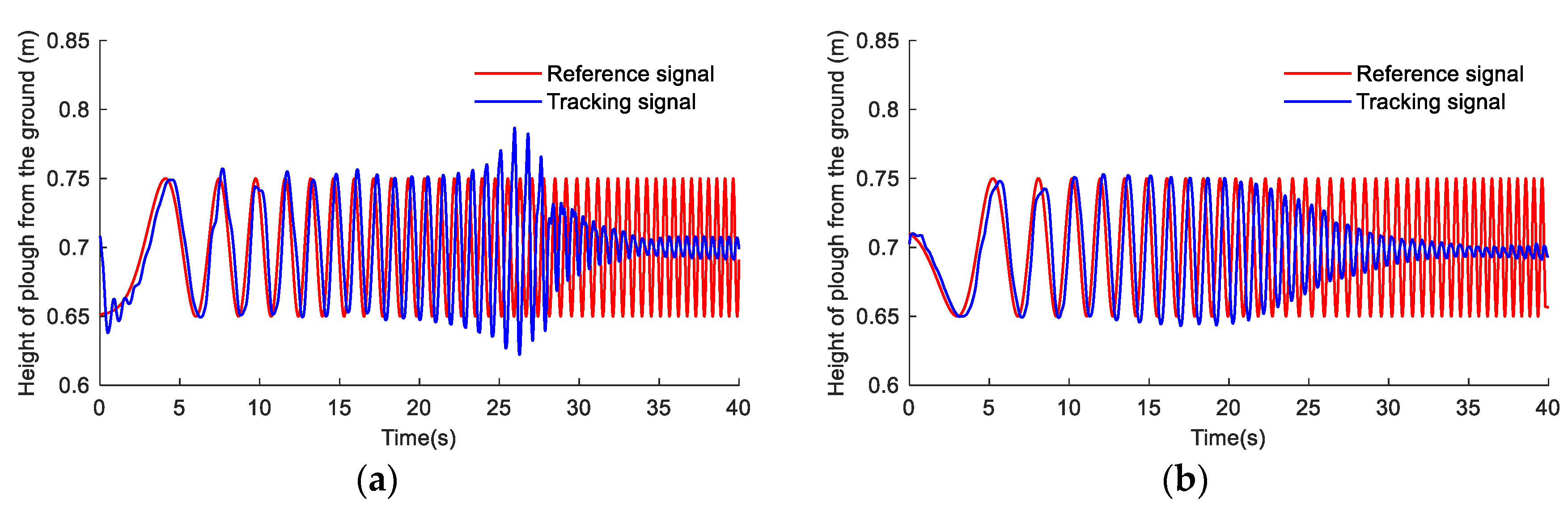
4.1. Sweep Frequency Test of Tractor Hitch System
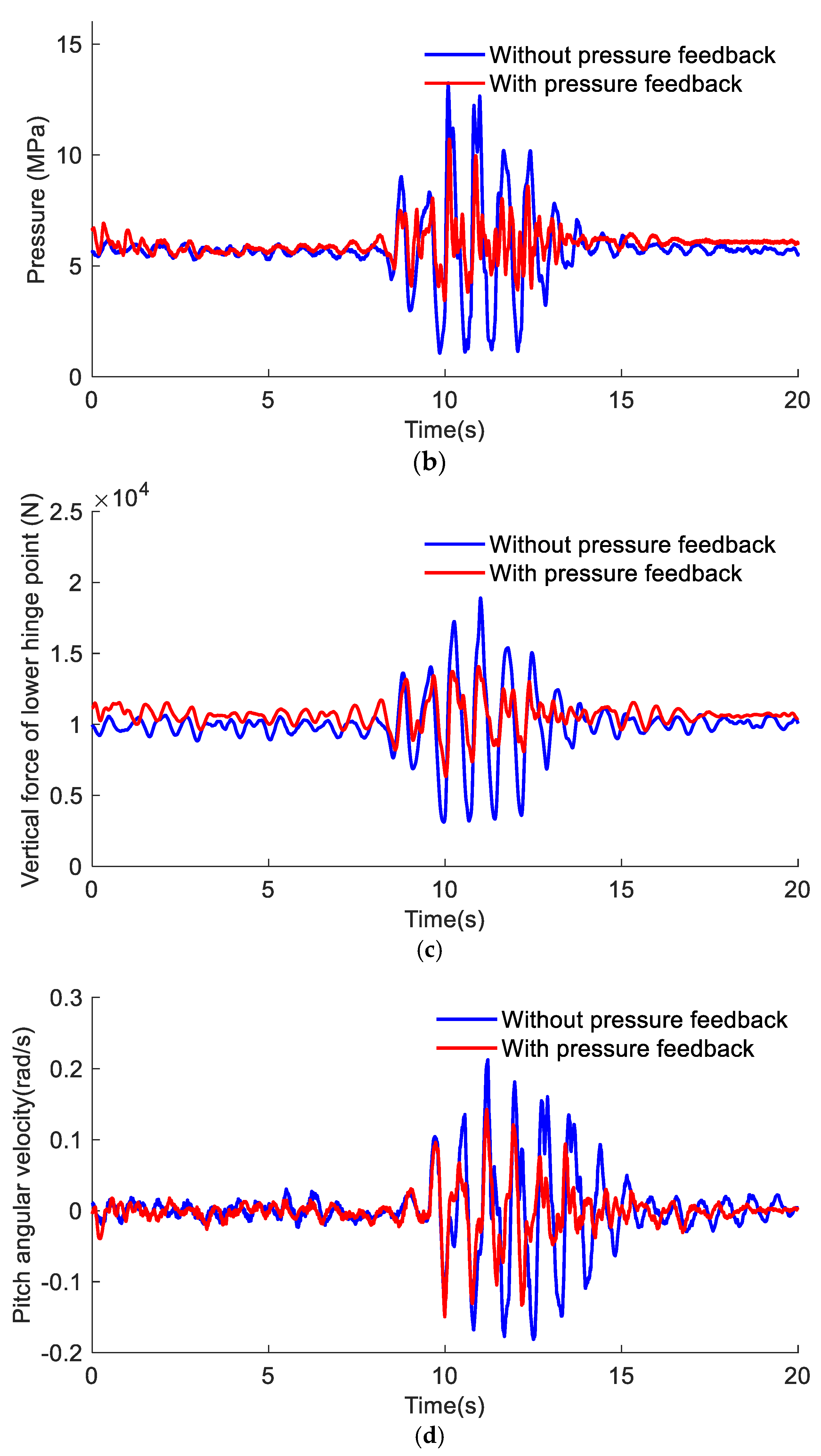
4.2. Passing the Barrier Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hansson, P.A. Optimization of agricultural tractor cab suspension using the evolution method. Comput. Electron. Agric. 1995, 12, 35–49. [Google Scholar] [CrossRef]
- Saeys, W.; Mouazen, A.M.; Anthonis, J.; Ramon, H. An Automatic Depth Control System for Online Measurement of Spatial Variation in Soil Compaction, Part 2: Modelling of the Depth Control System. Biosyst. Eng. 2004, 89, 267–280. [Google Scholar] [CrossRef]
- Janulevičius, A.; Šarauskis, E.; Čiplienė, A.; Juostas, A. Estimation of farm tractor performance as a function of time efficiency during ploughing in fields of different sizes. Biosyst. Eng. 2019, 179, 80–93. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, J.; Gu, J.; Du, Y.; Li, Z.; Zhu, Z.; Mao, E. Pressure control algorithm based on adaptive fuzzy PID with compensation correction for the tractor electronic hydraulic hitch. Appl. Sci. 2020, 10, 3179. [Google Scholar] [CrossRef]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable structure control: A survey. IEEE Trans. Ind. Electron. 1993, 40, 2–22. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.J.; Mao, E.R.; Song, Z.H. Effect of Hydraulic Impact on Tractor Body Vibration. Tract. Farm Transp. 2007. Available online: http://en.cnki.com.cn/Article_en/CJFDTotal-TLJY200705011.htm (accessed on 19 July 2023).
- Yin, X.J.; Song, Z.H.; Zhu, Z.X.; Xie, B.; Wu, X. New electro-hydraulic control system for tractor. J. Jilin Univ. (Eng. Technol. Ed.) 2008. Available online: http://en.cnki.com.cn/Article_en/CJFDTOTAL-JLGY200803018.htm (accessed on 19 July 2023).
- Rexroth Bosch Group. Knowledge Explanation: Hydraulic for Tractor; Bosch Robert AG: Ditzingen, Germany, 2014. [Google Scholar]
- Cheng, J.; Chi, R.; Mao, E. Influence of hanging farm implement on vibration of tractor with electro-hydraulic hitch system. Trans. Chin. Soc. Agric. Eng. 2015, 31, 24–32. [Google Scholar]
- Cheng, J.; Chi, R.; Lai, Q.; Yang, Y.; Mao, E. Active vibration control of tractor based on electro-hydraulic hitch system. Trans. Chin. Soc. Agric. Eng. 2017, 33, 82–90. [Google Scholar]
- Liu, C.; Hua, B.; Du, Y.; Li, Z.; Zhu, Z.; Mao, E. Dynamic Pressure Feedback Correction Method for Tractor Electro Hydraulic Hitch. Trans. Chin. Soc. Agric. Eng. 2020, 51, 7. [Google Scholar]
- Zheng, E.; Zhong, X.; Zhu, R.; Xue, J.; Cui, S.; Gao, H.; Lin, X. Investigation into the vibration characteristics of agricultural wheeled tractor-implement system with hydro-pneumatic suspension on the front axle. Biosyst. Eng. 2019, 186, 14–33. [Google Scholar] [CrossRef]
- Bell, R.; De Pennington, A. Active compensation of lightly damped electrohydraulic cylinder drives using derivative signals. Proc. Inst. Mech. Eng. 1969, 184, 83–98. [Google Scholar] [CrossRef]
- Krus, P.; Palmberg, J. Damping of mobile systems in machines with high inertia loads. Proc. JFPS Int. Symp. Fluid Power 1989, 1989, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Rahmfeld, R.; Ivantysynova, M. An Overview about Active Oscillation Damping of Mobile Machine Structure. Int. J. Fluid Power 2004, 5, 5–24. [Google Scholar] [CrossRef]
- Andersen, T.O.; Hansen, M.R.; Pedersen, H.C.; Conrad, F. Comparison of Linear Controllers for A. In Proceedings of the JFPS International Symposium on Fluid Power, Tsukuba, Japan, 5–10 November 2005. [Google Scholar]
- Zæv, E.; Rath, G.; Kargl, H. Energy Efficient Active Vibration Damping; Linköping University Electronic Press: Linköping, Sweden, 2013; pp. 355–364. [Google Scholar]
- Watton, J. Fundamentals of Fluid Power Control: Steady-State Characteristics of Circuit Components; Cambridge University Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Axin, M.; Krus, P. Design Rules for High Damping in Mobile Hydraulic Systems; Linköping University Electronic Press: Linköping, Sweden, 2013; pp. 13–20. [Google Scholar]
- Axin, M.; Palmberg, J.; Krus, P. Optimized damping in cylinder drives using the meter-out orifice: Design and experimental verification. In Proceedings of the 8th International Fluid Power Conference, Dresden, Germany, 26–28 March 2012; pp. 579–591. [Google Scholar]
- Axin, M. Mobile Working Hydraulic System Dynamics; Linköping University Electronic Press: Linköping, Sweden, 2015; Volume 1697. [Google Scholar]
- Lantto, B.; Krus, P.; Palmberg, J.O. Dynamic Properties of Load-Sensing Systems with Interacting Complex Mechanical Loads. J. Dyn. Syst. Meas. Control. 1993, 115, 525. [Google Scholar] [CrossRef]
- Pedersen, H.C.; Andersen, T.O. Pressure Feedback in Fluid Power Systems—Active Damping Explained and Exemplified. IEEE Trans. Control. Syst. Technol. 2017, 26, 102–113. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Model | Model | Operating Parameters |
|---|---|---|---|
| Force-measuring pin | YZC-9 | Ocean Sensing System Engineering Co., Ltd., Bengbu, China | Working voltage: 24 V, output: −10 V~10 V analog signal, customized measuring range: −50,000 N~50,000 N, comprehensive error: <0.05 |
| Displacement sensor | LWH-0250 | Novotechnik, Ostfildern, Germany | Working voltage: 12 V, output: 0~10 V analog signal, measuring range: 0–250 mm, resolution: >0.01 mm |
| Pressure sensor | MIK-P300 | Hangzhou Mico Sensing Technology Co., Ltd., Hangzhou, China | Working voltage: 24 V, output: 0–5 V analog signal, accuracy: 12 bits, customized range: 0–20 MPa |
| Controller | TMS320F28335 | Texas Instruments (TI), Dallas, TX, USA | Working voltage: 3.3 V, with strong signal processing and communication capability, two ways to enhance eCAN, support floating point operation, and support external serial communication |
| Proportional amplifier | AEG-12A-02 | Qiaocun Technology Co., Ltd., Chengdu, China | Working voltage: 24 V, CAN bus input interface, maximum output current adjustable: 0.2~3 A |
| Pressure of the Hydraulic Cylinder (MPa) | Vertical Force of the Lower Articulation Point (N) | Pitch Angular Velocity (rad/s) | ||||
|---|---|---|---|---|---|---|
| Range | Standard | Range | Standard | Range | Standard | |
| locking of hydraulic cylinder | 12.19 | 1.44 | 15,780 | 1869 | 0.39 | 0.0498 |
| position control with pressure feedback | 7.27 | 0.63 | 7740 | 873 | 0.29 | 0.0295 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Gu, J.; Du, X.; Yang, L.; Du, Y.; Mao, E. A Vibration Reduction Control Method for Tractor Rear Hydraulic Hitch Based on Pressure Feedback. Agriculture 2023, 13, 1546. https://doi.org/10.3390/agriculture13081546
Liu C, Gu J, Du X, Yang L, Du Y, Mao E. A Vibration Reduction Control Method for Tractor Rear Hydraulic Hitch Based on Pressure Feedback. Agriculture. 2023; 13(8):1546. https://doi.org/10.3390/agriculture13081546
Chicago/Turabian StyleLiu, Changqing, Jinheng Gu, Xin Du, Le Yang, Yuefeng Du, and Enrong Mao. 2023. "A Vibration Reduction Control Method for Tractor Rear Hydraulic Hitch Based on Pressure Feedback" Agriculture 13, no. 8: 1546. https://doi.org/10.3390/agriculture13081546