Design and Field Test of a Leaping Type Soil-Covering Device on Plastic Film


Abstract
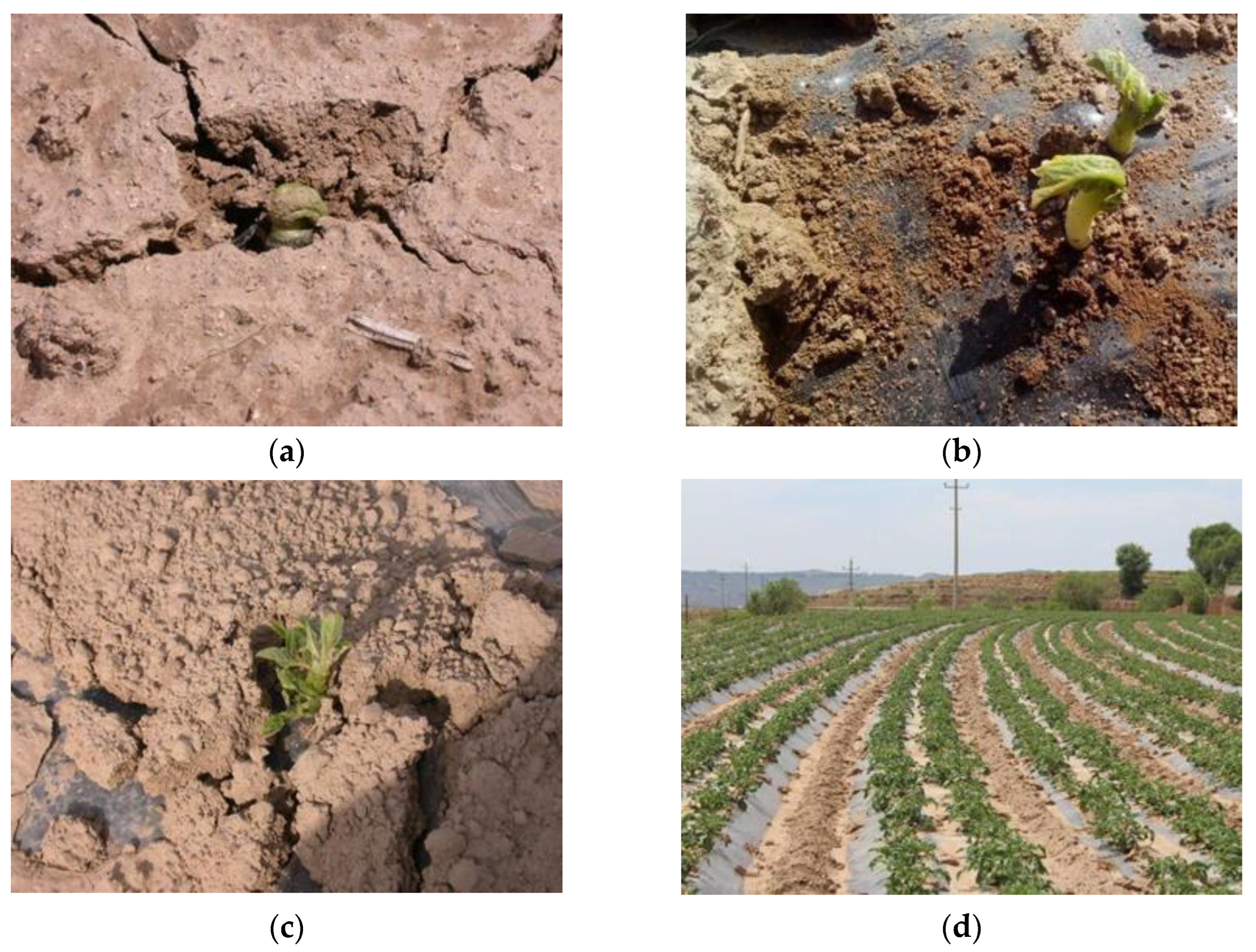
:1. Introduction
2. Materials and Methods
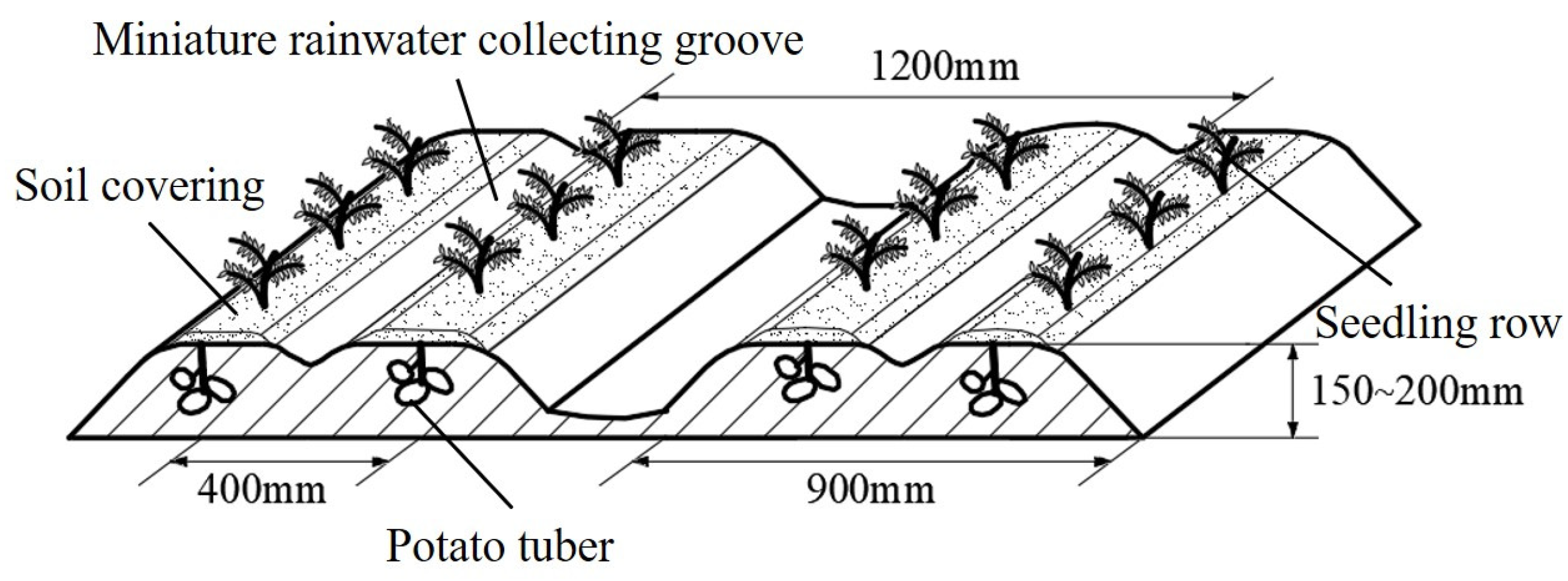
2.1. Agronomic Requirements
2.2. Overall Structure and Working Principle
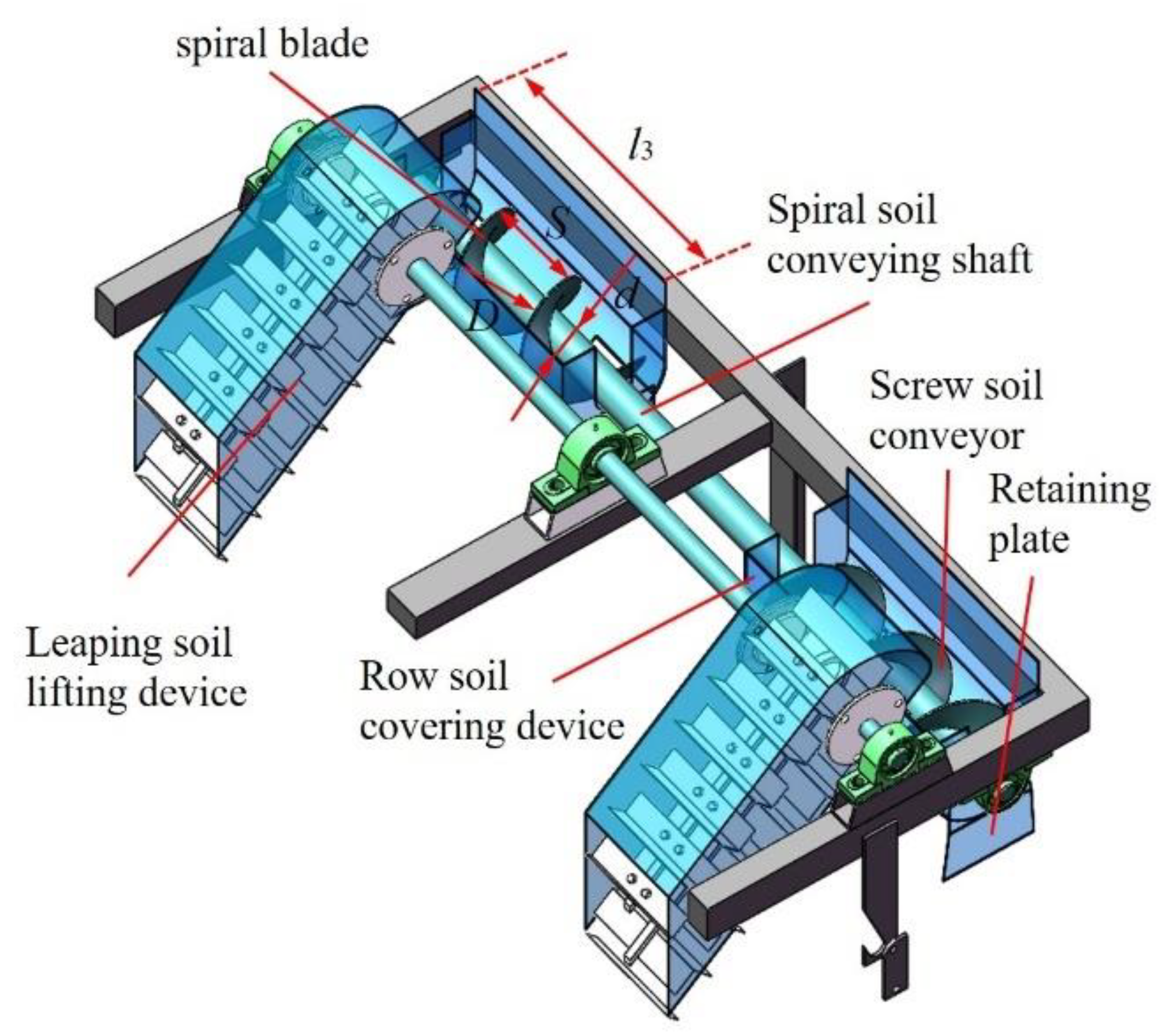
2.3. Structure of the Leaping Type Soil-Covering Device
2.4. Working Principle of the Leaping Type Soil-Covering Device
2.5. Leaping Soil-Lifting Device
2.5.1. Analysis of Scraper Movement of Leaping Soil-Lifting Device
2.5.2. Soil Delivery Capacity of Leaping Soil-Lifting Device
2.5.3. Depth of Soil Lifting
2.6. Lateral Soil-Covering Device
2.6.1. Screw Soil Conveyor Device
2.6.2. Seeding Row Soil-Covering Device
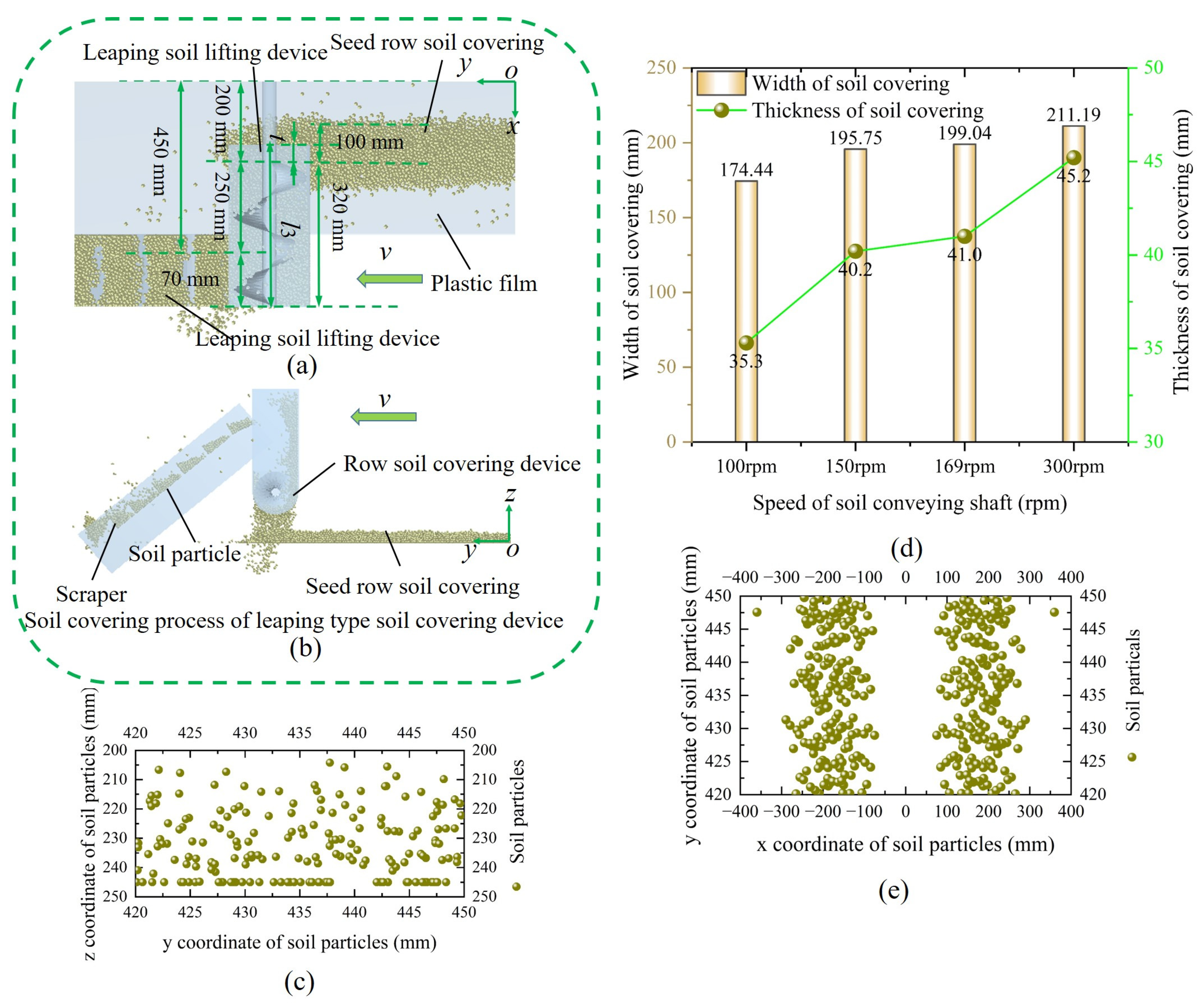
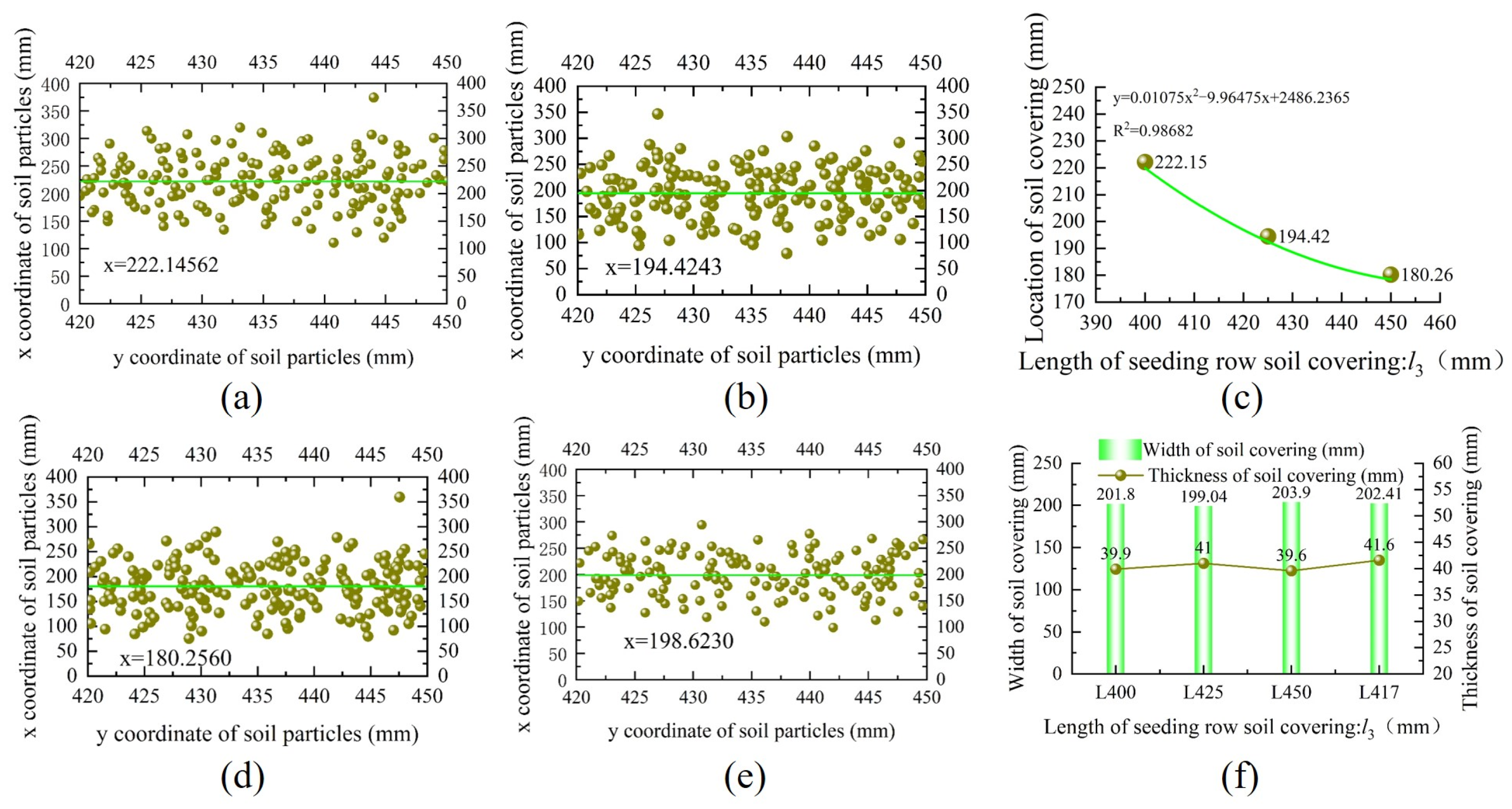
2.6.3. Cover Thickness and Width of Seeding Row
Simulation Parameter Settings
The Result of Soil-Covering Simulation
2.6.4. Analysis of the Dislocation Rate between Covering Soil on Seeding Row and Seedling Belt
2.7. Field Test
2.7.1. Overview of Test Site
2.7.2. Experimental Scheme and Method
2.7.3. Test Index
Qualified Rate of Thickness of Covering Soil
Qualified Rate of Width of Covering Soil
Dislocation Rate (DR) between Seeding Row Covering Soil and Seedling Belt
Damage Degree of Lighting Surface of Plastic Film
Natural Emergence Rate and Burning Rate of Potato Seedlings
3. Experimental Results
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Z.H.; Wen, X.Y.; Lv, J.Q.; Li, J.C.; Yi, S.J.; Qiao, D. Analysis and prospect of research progress on key technologies and equipment of potato planting mechanization. Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–16. [Google Scholar]
- Xu, L.T. Effect of Ridge-Furrow and Mulching on Root Exudates and Soil Chemical Properties in Potato Field under Continuous Cropping. Master’s Thesis, Gansu Agricultural University, Lanzhou, China, 2017. [Google Scholar]
- Duan, H.B.; Xu, T.; Cai, X.K.; Yao, F.H. Advance on key technology and equipment of mechanized production of virus-free seed potato. J. Huazhong Agric. Univ. 2021, 40, 54–62. [Google Scholar]
- Kang, W.Q.; Fan, M.S.H.; Ma, Z.H. Luxury absorption of potassium by potato plant. Am. J. Potato Res. 2014, 91, 573–578. [Google Scholar] [CrossRef]
- Chen, Y.N.; Li, Z.Q.; Xu, J.H. Changes and protection suggestions in water resources and ecological environment in arid region of Northwest China. Bull. Chin. Acad. Sci. 2023, 38, 385–393. [Google Scholar] [CrossRef]
- Chen, Y.Z.H. Effects of Mulching Patterns on Soil Hydrothermal Regimes and Yield Formation of Potato in Semiarid Rain-fed Ecosystem. Doctoral Dissertation, Gansu Agricultural University, Lanzhou, China, 2019. [Google Scholar]
- Tang, J.J.; Zhang, J.; Duan, Y.F.; Li, D.; Zhang, L.F. Study on the effects of eight kinds of crops spontaneously puncture of plastic-film. Chin. Agric. Sci. Bull. 2011, 27, 244–248. [Google Scholar]
- Zhou, J.H.; Tang, W.J.; Yang, Z.F.; Guo, H.C.H. The effects of growth, yield and quality of potato with covering soil on the plastic film cultivation in spring cropping of Yunnan. J. Yunnan Agric. Univ. Nat. Sci. 2017, 32, 999–1005. [Google Scholar]
- Li, M.J.; Liu, Y.; Zhou, Y.Y.; Zeng, L.Q. Effects of different kind of plastic film and mulching methods on economic trait and yield of potato. Farming Cultiv. 2013, 5, 37–38. [Google Scholar]
- Zhao, H.; Wang, R.Y.; Ma, B.L. Ridge-furrow with full plastic film mulching improves water use efficiency and tuber yields of potato in a semiarid rainfed ecosystem. Field Crops Res. 2014, 161, 137–148. [Google Scholar] [CrossRef]
- Yang, Z.H.N.; Tang, J.J.; Zhang, L.F. A Study on self-puncture effect of different crops in sub-soil planting with film mulching. Agric. Res. Arid Areas 2012, 30, 61–65. [Google Scholar]
- Tang, J.J.; Zhang, J.; Duan, Y.F.; Li, D.; Zhang, L.F. Study on the effect of automatic film breaking of eight crops. Chin. Agric. Sci. Bull. 2012, 30, 61–65. [Google Scholar]
- Chen, J.B.; Zhang, Z.T.; Hao, B.W.; Liu, H.Y.; Duan, W.W. Effect of film mulching soil on the growth of film mulched potato in dry farming. Bull. Agric. Sci. Technol. 2013, 4, 55–57. [Google Scholar]
- Liu, Q.; Sun, W.; Zhang, H.; Liu, X.; Li, H.; Simionescu, P.A. Numerical simulation and experiment of the emergence of young potato sprouts through soil-covered plastic mulching. Agron. J. 2023, 1–10. [Google Scholar] [CrossRef]
- Sun, W.; Liu, X.L.; Zhang, H.; Wang, H.C.; Tian, B. Design of potato casing soil planter in all-in-one machine combined with fertilizing, sowing, ridging, complete film mulching and planting line covering. J. Agric. Eng. 2017, 33, 14–22. [Google Scholar]
- Zhang, R.; Sun, W.; Shi, L.R.; Wu, J.M.; Gao, S.D.; Li, Y.L.; Liu, X.L.; Zhao, Z.W. Design and test of the weeding cultivator and hilling machine in double ridge furrow with whole film mulch. Agric. Res. Arid. Areas 2015, 33, 258–262. [Google Scholar]
- Li, K.; Li, S.; Teng, X.; Deng, Z.; Huang, W.; Gan, F.; Ma, F. Integrated Design and Evaluation of a Soil-Covering and Film-Mulching Device for Sugarcane Transverse Planters. Agronomy 2021, 11, 1382. [Google Scholar] [CrossRef]
- Zheng, Z.; Fu, Z.; Wang, C.; Huang, Y.; He, J. Design and Experimental Research on Soil Covering Device with Linkage and Differential Adjustment of Potato Planter. Agriculture 2021, 11, 665. [Google Scholar] [CrossRef]
- Zhang, X.L.; Li, Y.P.; Yang, J.F. Optimization and analysis of the parameters of the soil cover roller of the seeder based on discrete element method. J. Chin. Agric. Mech. 2020, 41, 43–48. [Google Scholar]
- Wang, M.; Liu, Q.; Ou, Y.; Zou, X. Numerical Simulation and Verification of Seed-Filling Performance of Single-Bud Billet Sugarcane Seed-Metering Device Based on EDEM. Agriculture 2022, 12, 983. [Google Scholar] [CrossRef]
- Fang, H.J.; Ni, S.H.P.; Zhang, L.Y. Introduction and Application of Potato Machinery on Earth Technology in Guyuan City. Trop. Agric. Eng. 2018, 42, 32–33. [Google Scholar]
- Yang, L.S.H.; Wang, C.H.; He, P.H.; An, Y.X. Optimum Thickness of Covering Soil on Plastic Films of Potato Cultivation. J. Agric. 2016, 6, 60–63. [Google Scholar]
- Dai, F.; Song, X.F.; Zhao, W.Y.; Wei, W.C.H.; Zhang, F.W.; Ma, H.J. Design and Experiment of Operation Machine for Filming and Covering Soil on Tiny Ridges. Trans. Chin. Soc. Agric. Mach. 2020, 51, 97–110. [Google Scholar]
- Li, G.; Ai Li, H.; Kang, X.S.H.; Yu, G.H.; Zhang, G.F. Parametric optimization of the spiral cylinder of a plastic-film mulch seeder. Trans. Chin. Soc. Agric. Eng. 2003, 19, 135–138. [Google Scholar]
- Chen, X.G.; Zhao, Y. Development of double-film mulch precision planter for cotton seeding. Trans. Chin. Soc. Agric. Eng. 2010, 26, 106–112. [Google Scholar]
- Liu, Y.; Li, Y.X.; Wang, T. Analysis and comparison of characteristics and performance of two kinds of soil covering mechanisms on membrane. Xinjiang Agric. Reclam. Technol. 2010, 3, 49–50. [Google Scholar]
- Srivastava, A.K.; Goering, C.E.; Rohrbach, R.P.; Buckmaster, D.R. Engineering Principles of Agricultural Machines, 2nd ed.; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2006. [Google Scholar]
- Xiang, D.Z.H.; Xu, Y.W. Design Parameter Selection of Spiral Conveyer. Cem. Technol. 2010, 1, 29–33. [Google Scholar]
- NY/T 1415-2007; Technical Specification for Quality Evaluation of Potato Planter. Standards of China: Beijing, China, 2007.
- NY/T 987-2006; Operation Quality of Film Mulching Hole Seeder. Standards of China: Beijing, China, 2006.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Category | Poisson’s ratio | Shear modulus (Pa) | Density (kg/m3) |
| Material parameters | Soil | 0.40 | 1 × 106 | 1300 |
| Steel | 0.28 | 3.5 × 1010 | 7850 | |
| Film | 0.49 | 6.1 × 106 | 1000 | |
| Project | Category | Restitution | Static friction coefficient | Dynamic friction coefficient |
| Contact parameters | Particle–Particle | 0.21 | 0.68 | 0.27 |
| Particle–Steel | 0.54 | 0.31 | 0.13 | |
| Particle–Film | 0.30 | 0.42 | 0.34 |
| Sample | Test Plot | m1 | m2 | m3 | m4 | η1/(%) | η2/(%) | DR/(%) | η′/(mm/m2) |
|---|---|---|---|---|---|---|---|---|---|
| Sample plot 1 | 1 | 9 | 1 | 10 | 0 | 90 | 100 | 8 | 54.5 |
| 2 | 9 | 1 | 9 | 1 | 90 | 90 | 4 | 46.8 | |
| 3 | 10 | 0 | 9 | 1 | 100 | 90 | 2 | 39.3 | |
| 4 | 9 | 1 | 9 | 1 | 90 | 90 | 6 | 48.9 | |
| 5 | 9 | 1 | 9 | 1 | 90 | 90 | 4 | 51.6 | |
| Sample plot 2 | 1 | 9 | 1 | 9 | 1 | 90 | 90 | 5 | 47.7 |
| 2 | 9 | 1 | 9 | 1 | 90 | 90 | 3 | 51.1 | |
| 3 | 9 | 1 | 9 | 1 | 90 | 90 | 6 | 53.6 | |
| 4 | 9 | 1 | 9 | 1 | 90 | 90 | 7 | 45.2 | |
| 5 | 10 | 0 | 9 | 1 | 100 | 90 | 5 | 53.3 | |
| Mean | 9.2 | 0.8 | 9.1 | 0.9 | 92 | 91 | 5 | 49.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Sun, W.; Wang, H.; Meng, Y. Design and Field Test of a Leaping Type Soil-Covering Device on Plastic Film. Agriculture 2023, 13, 1680. https://doi.org/10.3390/agriculture13091680
Liu Q, Sun W, Wang H, Meng Y. Design and Field Test of a Leaping Type Soil-Covering Device on Plastic Film. Agriculture. 2023; 13(9):1680. https://doi.org/10.3390/agriculture13091680
Chicago/Turabian StyleLiu, Quandong, Wei Sun, Hucun Wang, and Yangrong Meng. 2023. "Design and Field Test of a Leaping Type Soil-Covering Device on Plastic Film" Agriculture 13, no. 9: 1680. https://doi.org/10.3390/agriculture13091680