
Optimization of Potato Planter Soil Lifting Device Based on TRIZ Theory

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
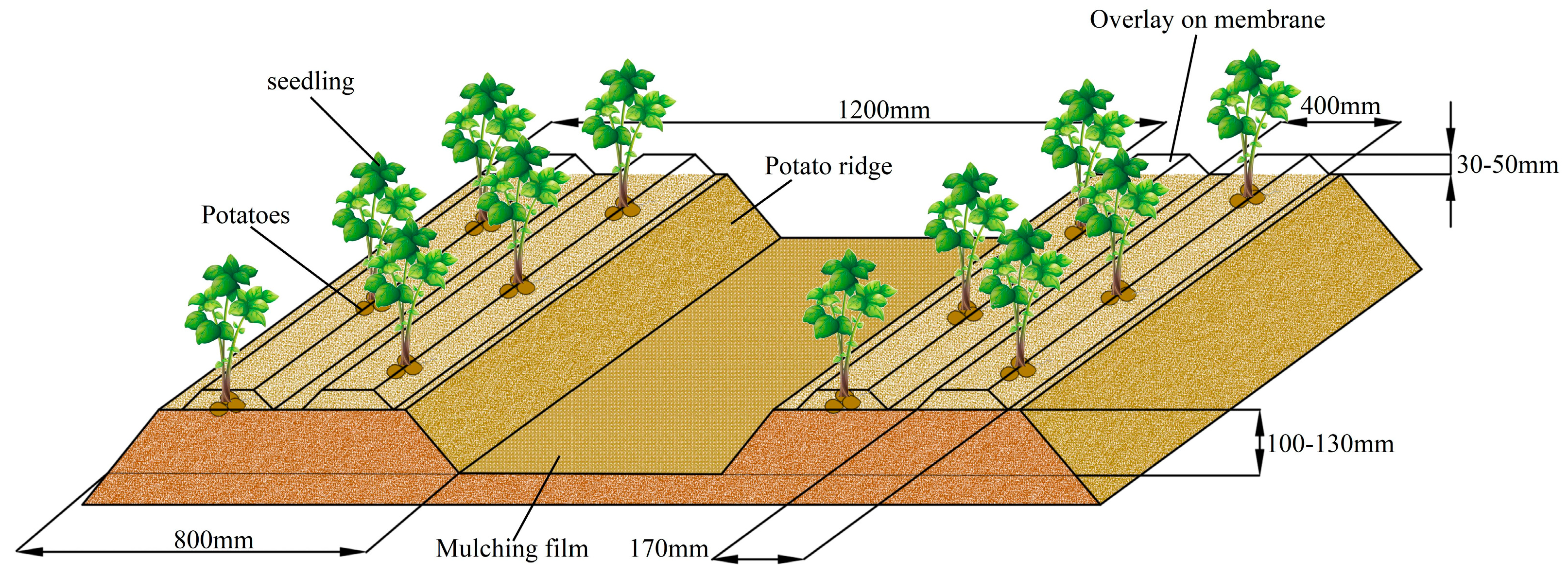
2.1. Agronomic Requirements
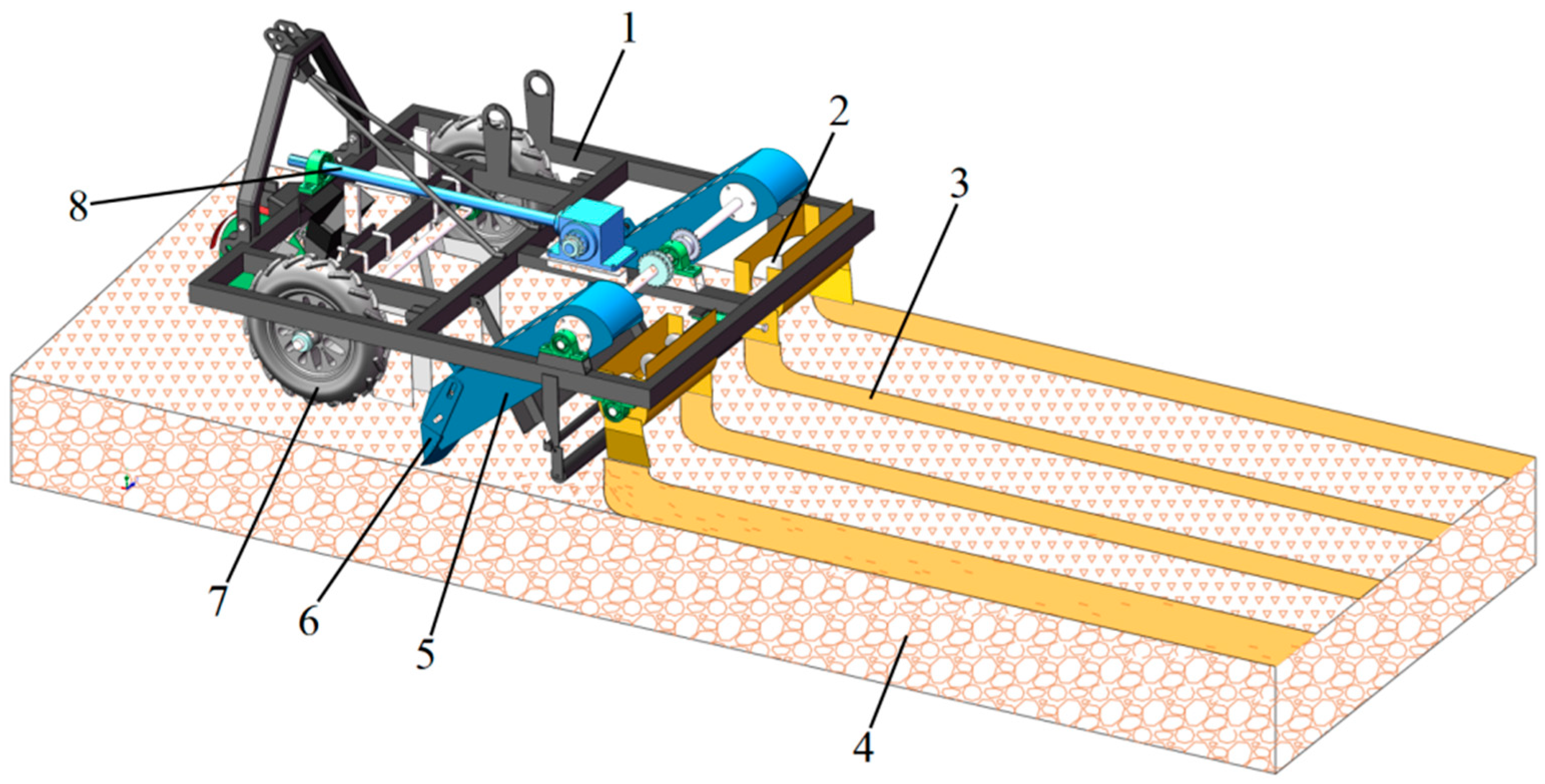
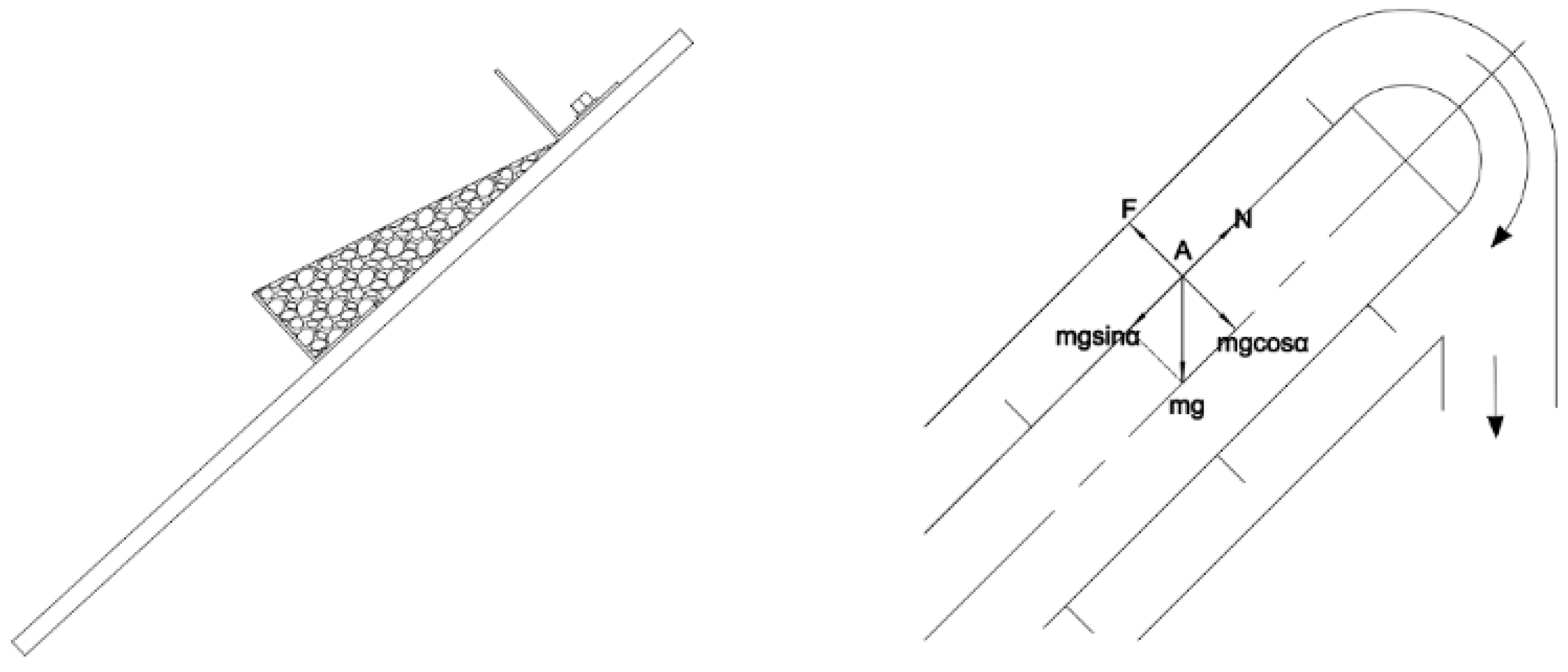
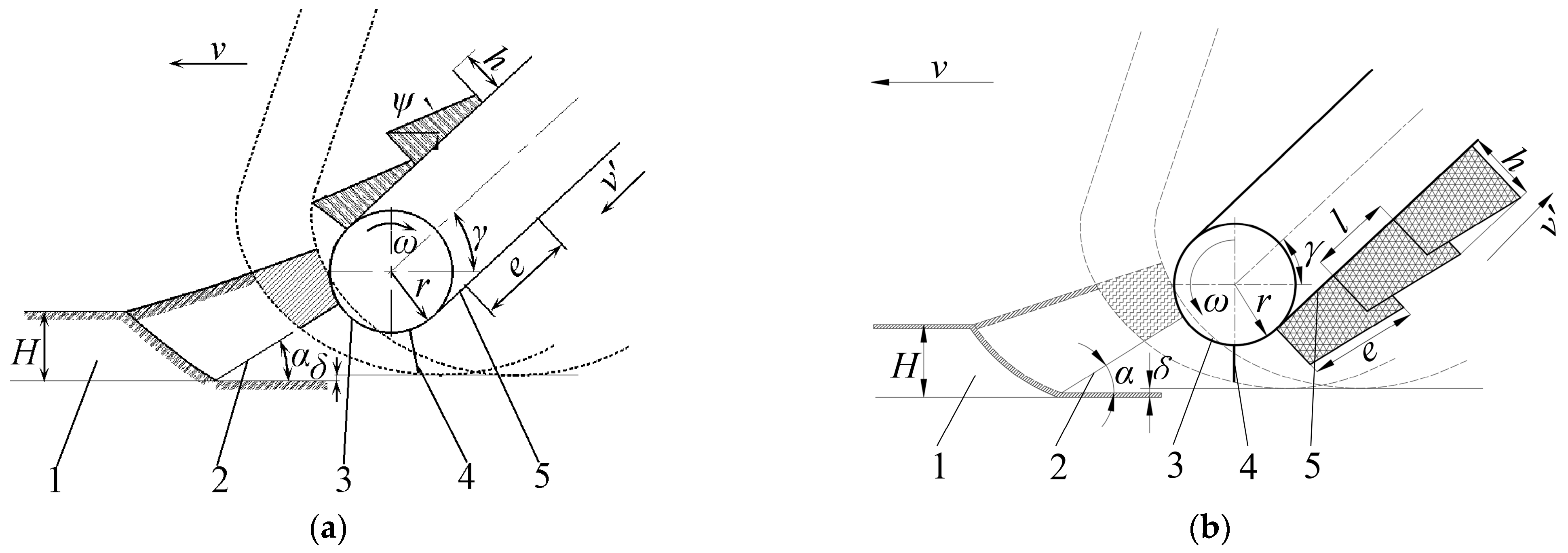
2.2. Principle of Operation
2.3. Issues to Be Addressed
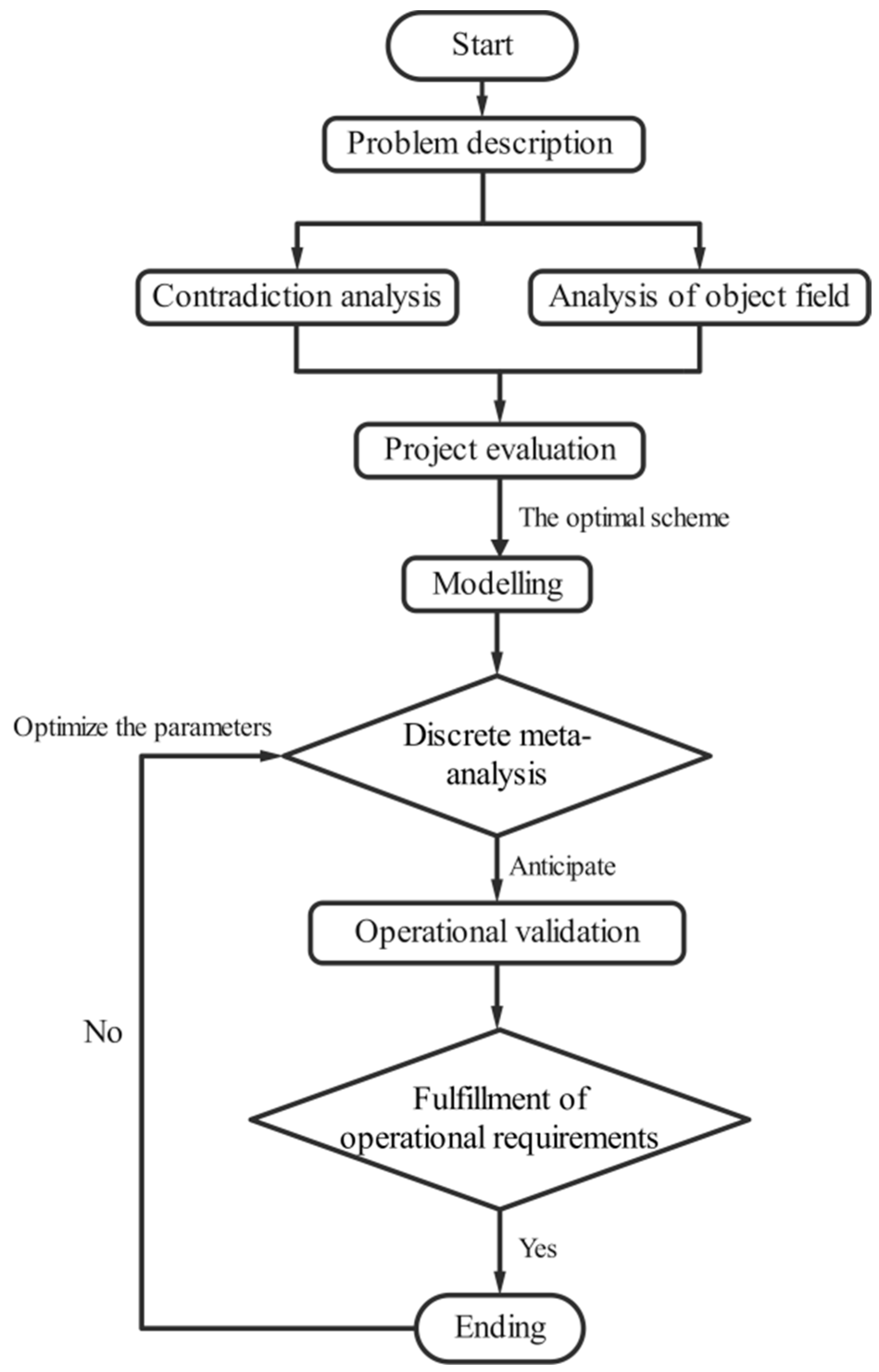
2.4. Application of TRIZ in Design
2.5. Innovative Design of Soil Extraction Shovel Based on “Contradiction Analysis”
- q0 is the amount of soil extraction;
- v is the forward speed of the unit;
- is the working time of the unit;
- b0 is the width of the shovel surface of the soil extraction shovel;
- H is the depth of soil extraction.
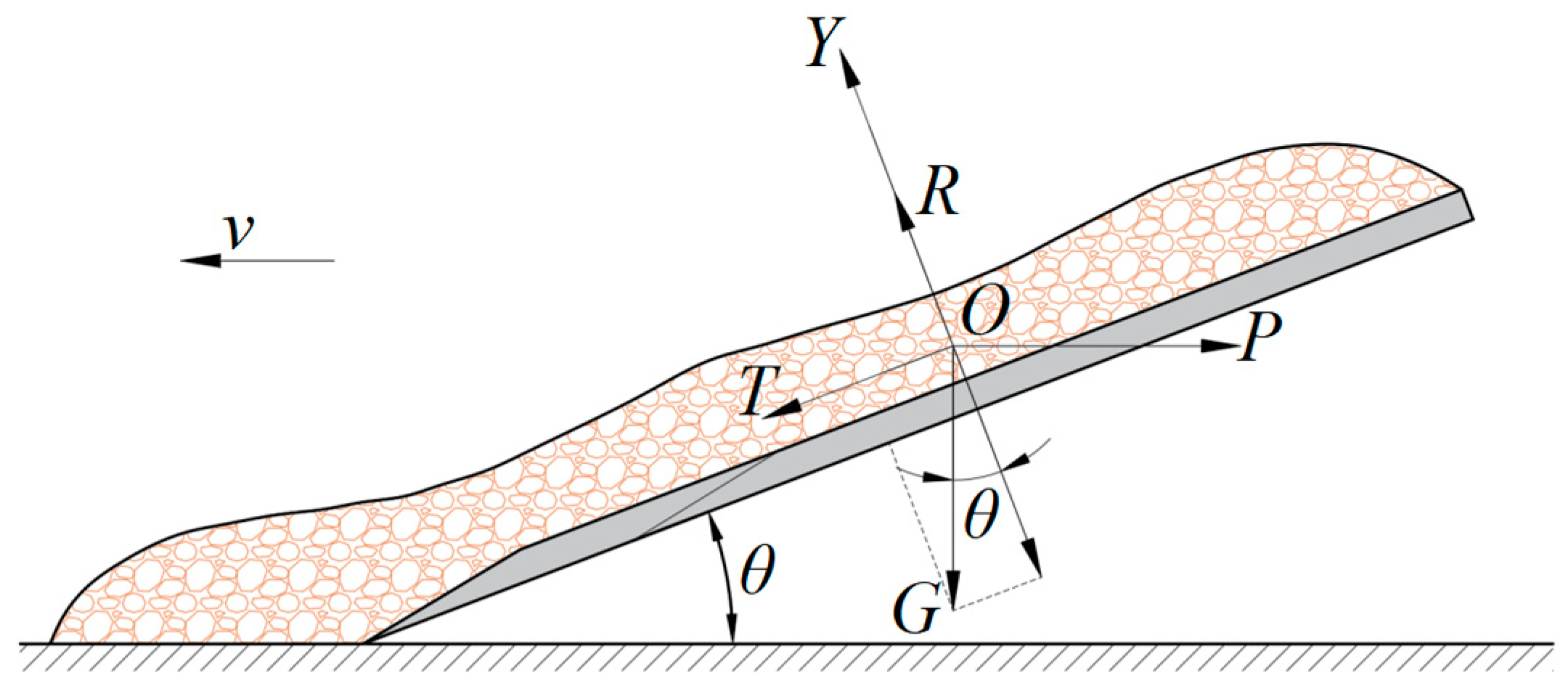
- P is the force required to move the earth extraction shovel to dig up the soil;
- R is the reaction force of the earth extraction shovel on the soil;
- is the inclination angle of the shovel;
- is the coefficient of friction of the soil on the earth extraction shovel.
- G is the acceleration of gravity.
- T is the friction of the shovel on the soil.
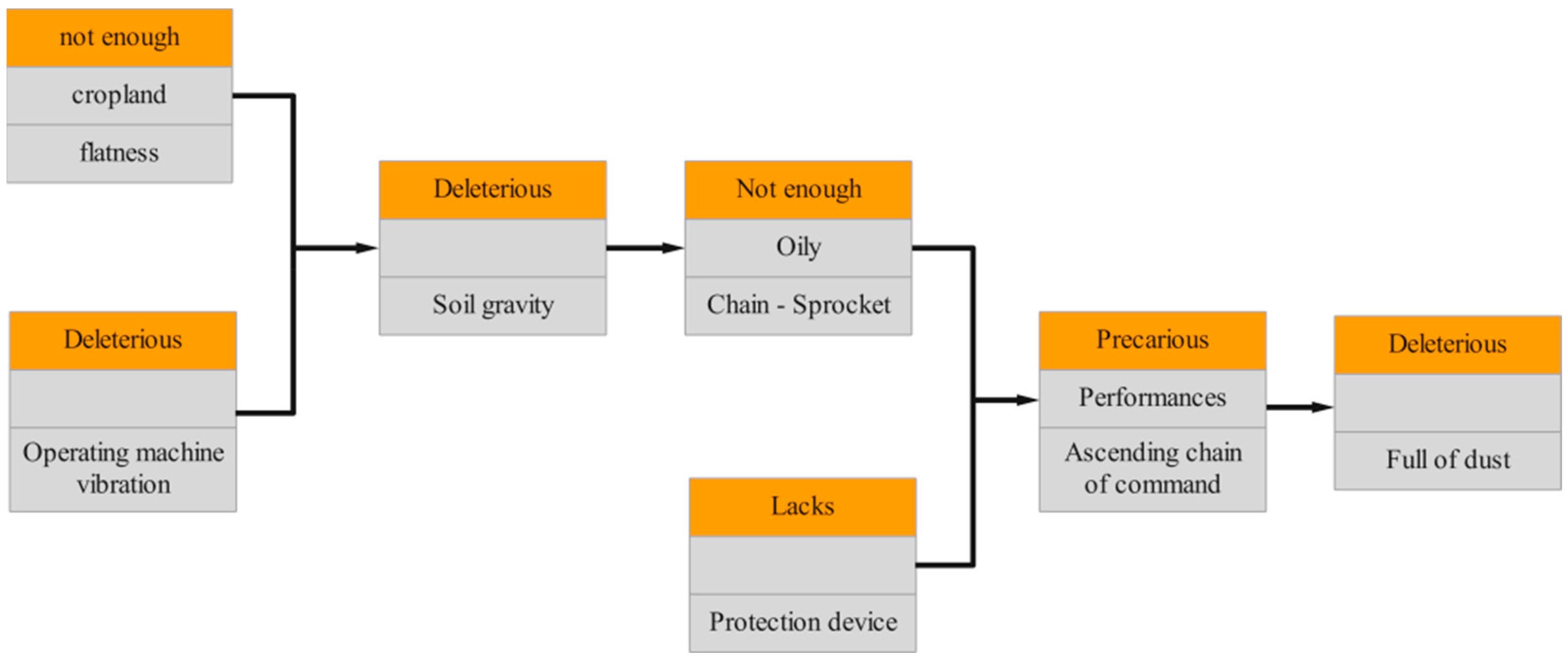
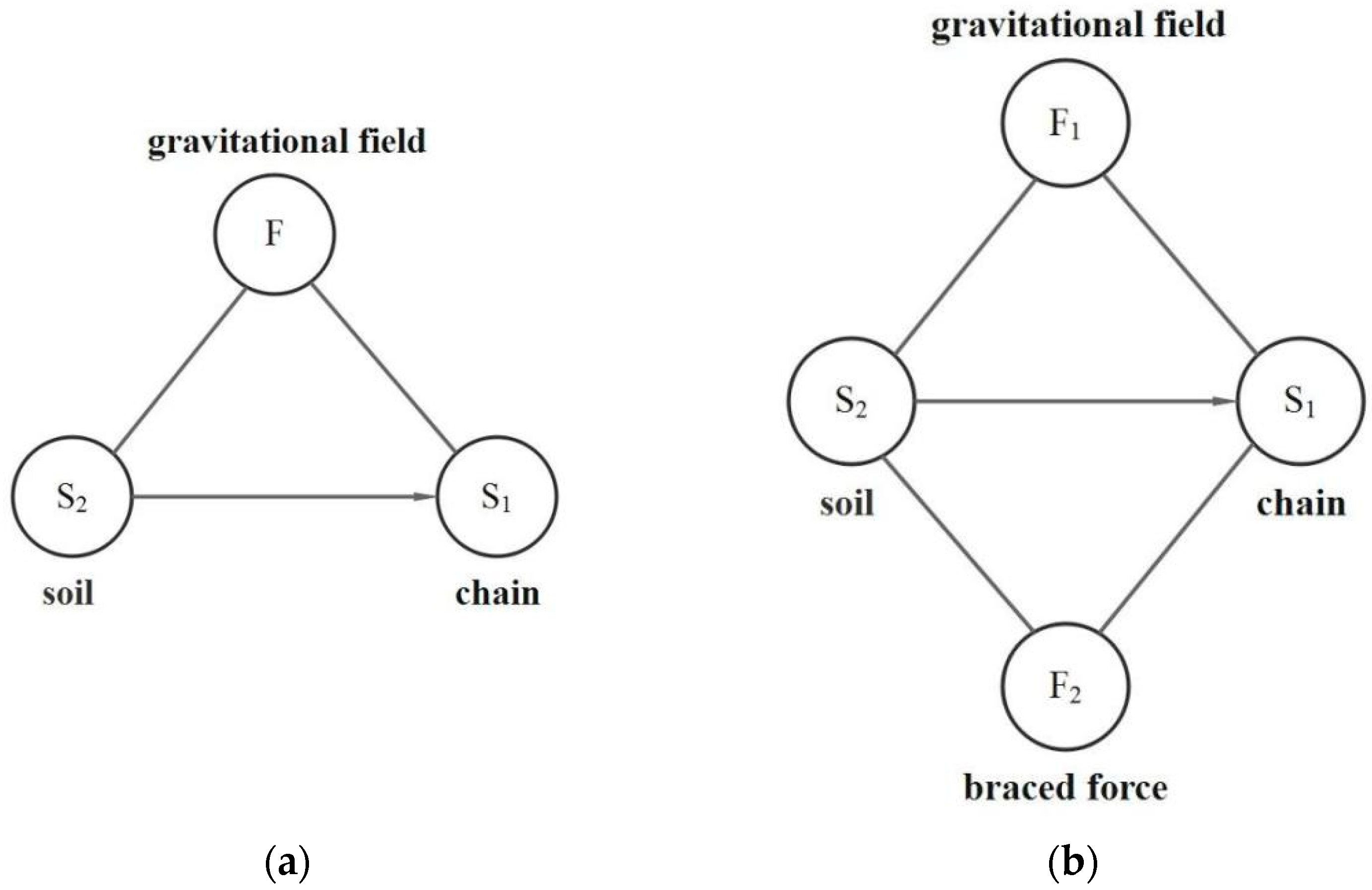
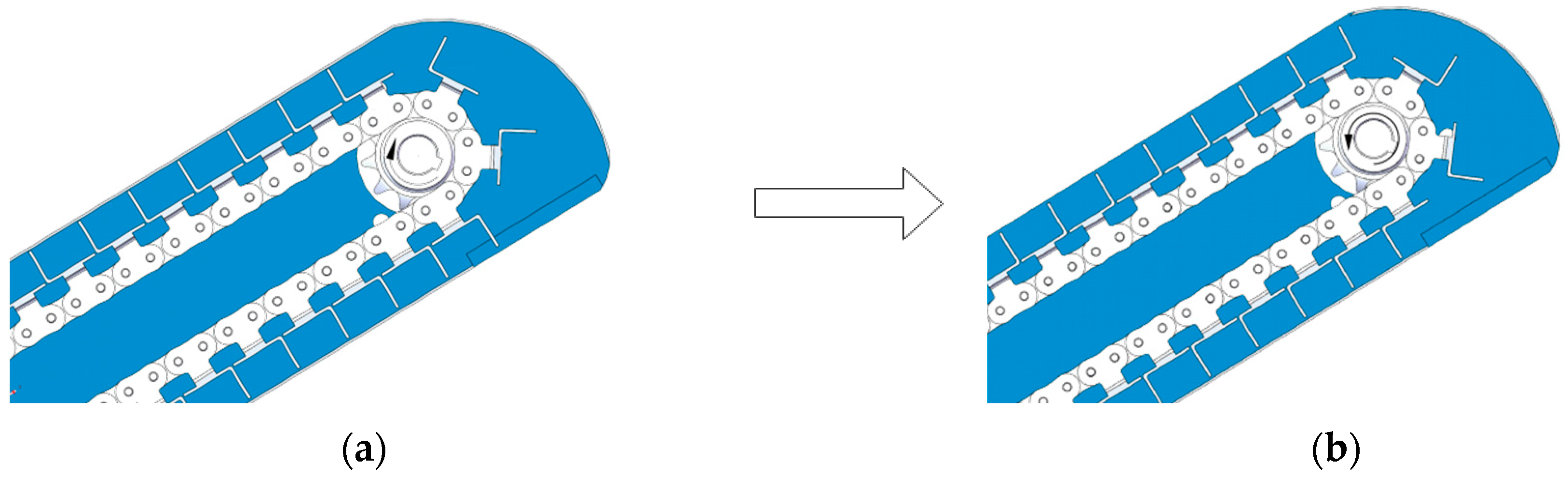
2.6. Innovative Design of Scraper Lifting Device Based on “Object Field Analysis”
- x is the horizontal displacement of the scraper end;
- y is the vertical displacement of the scraper end;
- r is the radius of the driven wheel;
- h is the height of the scraper;
- is the speed of the ascending chain;
- v is the forward speed of the unit;
- is the turning angle of the scraper.
3. Simulation Test
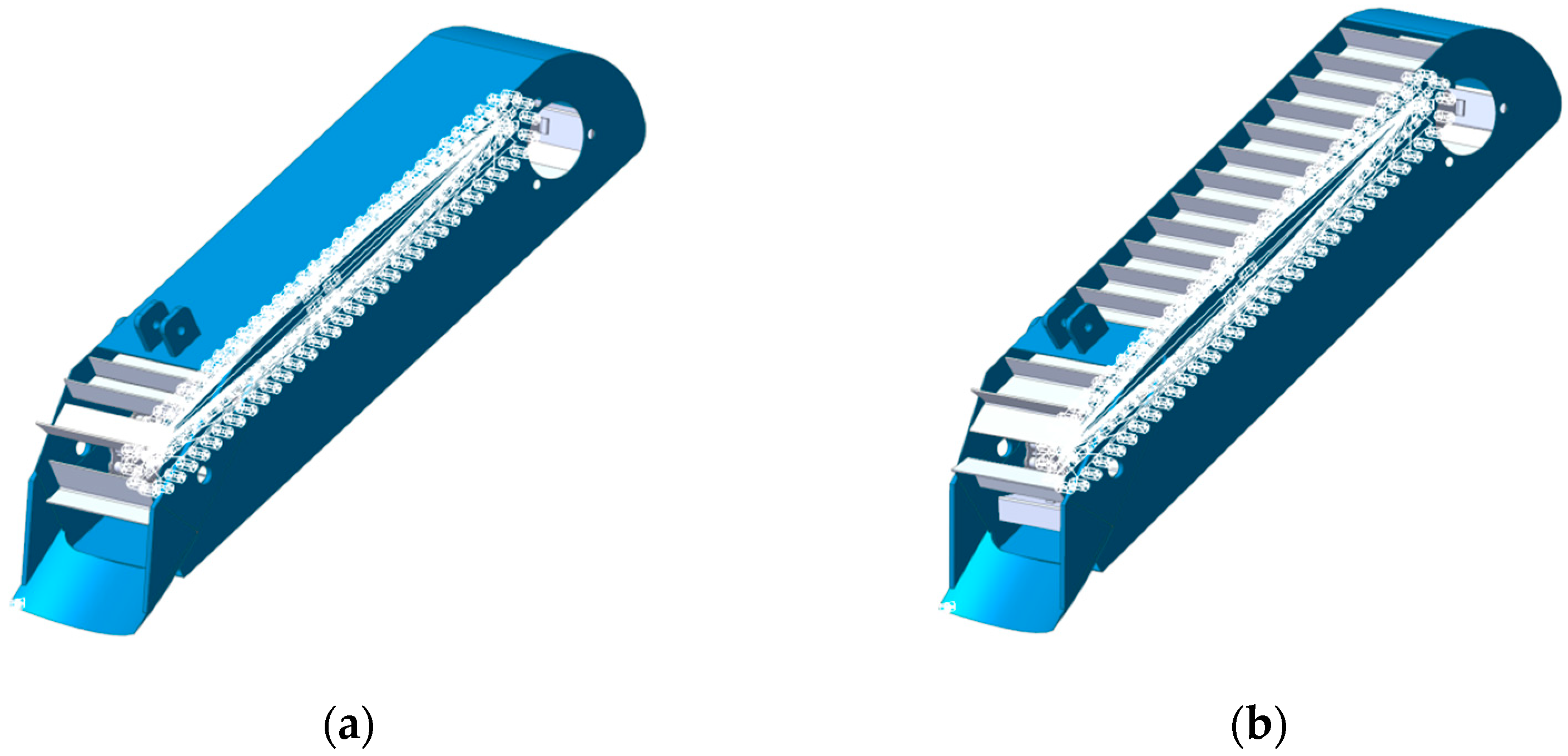
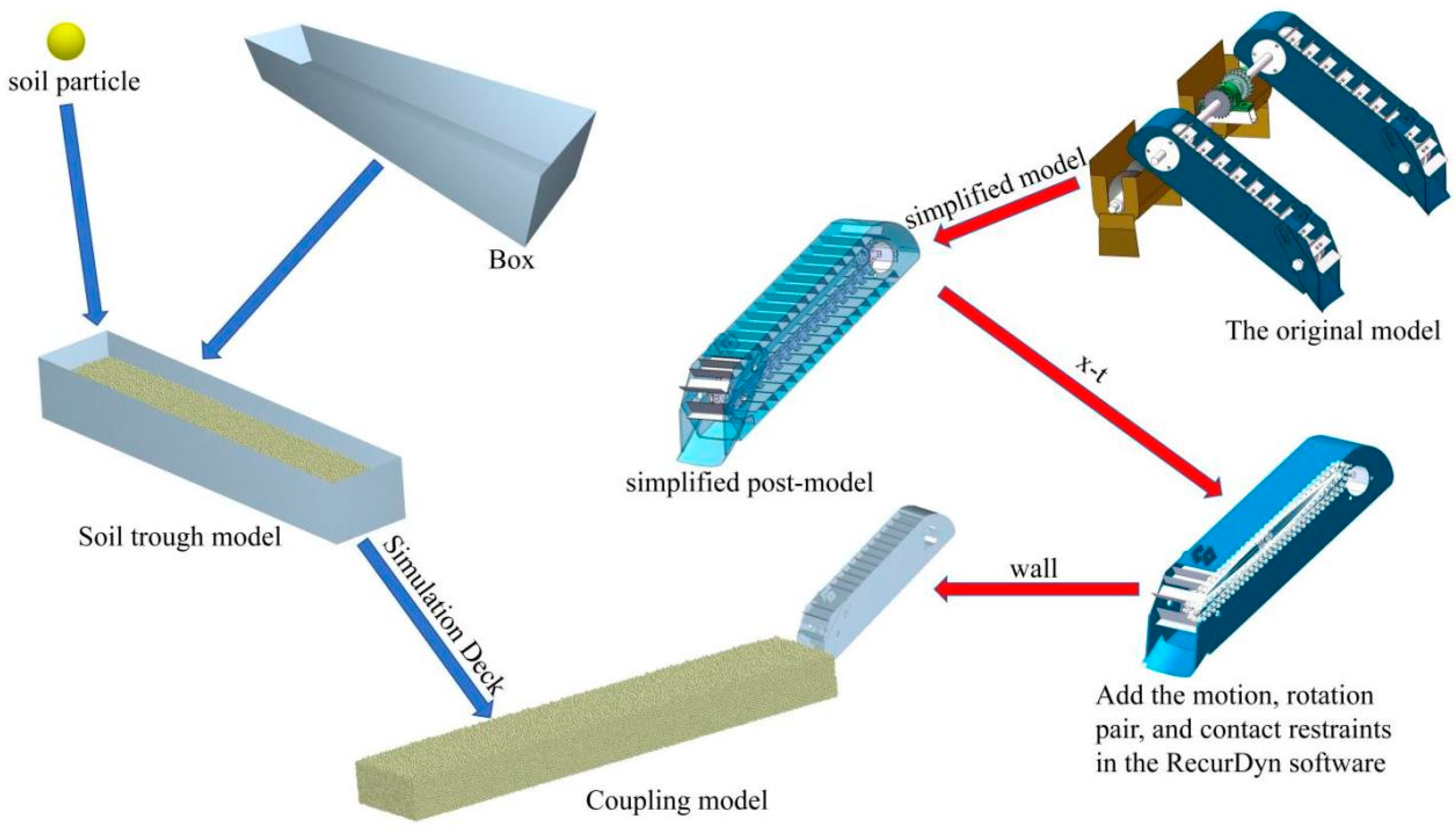
3.1. Discrete Element Modeling
3.2. Multi-Body Dynamics Modeling
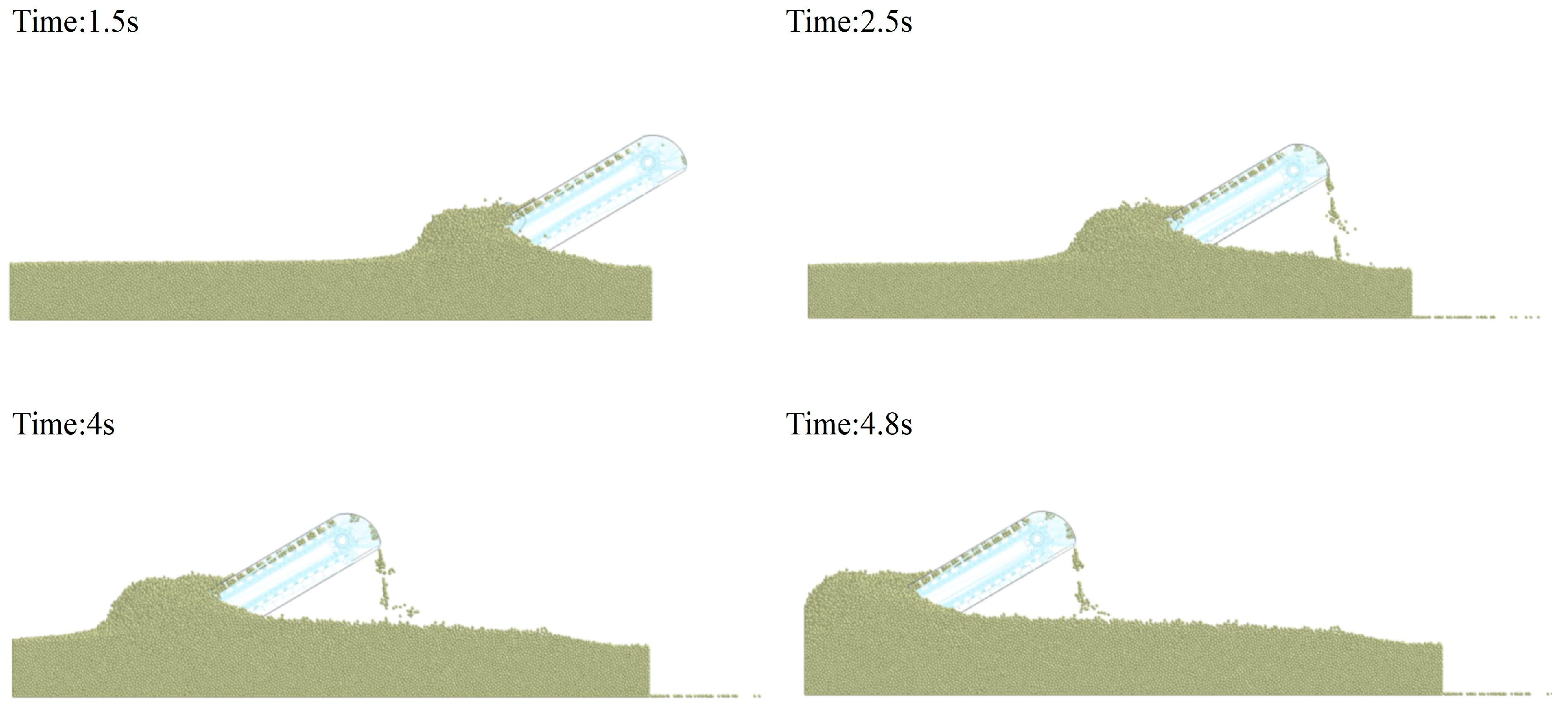
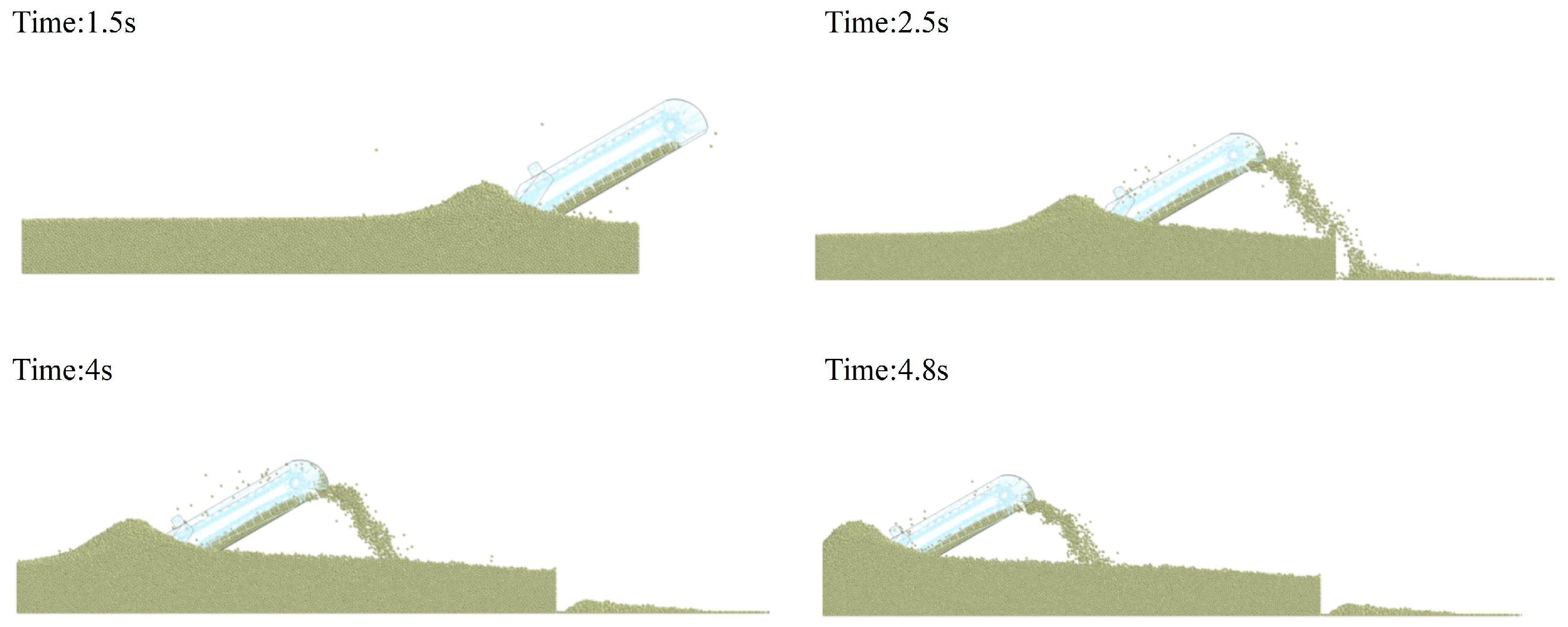
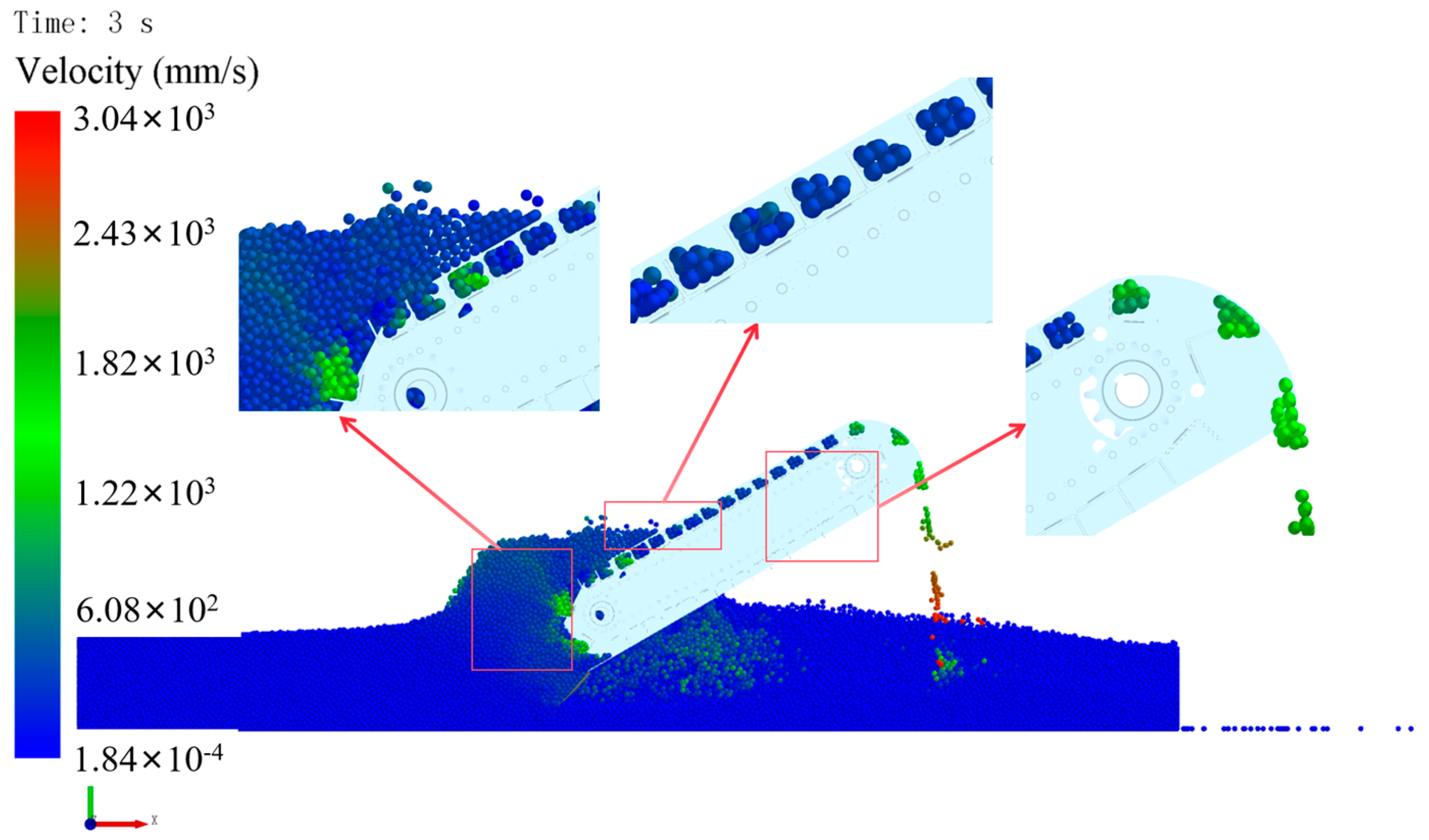
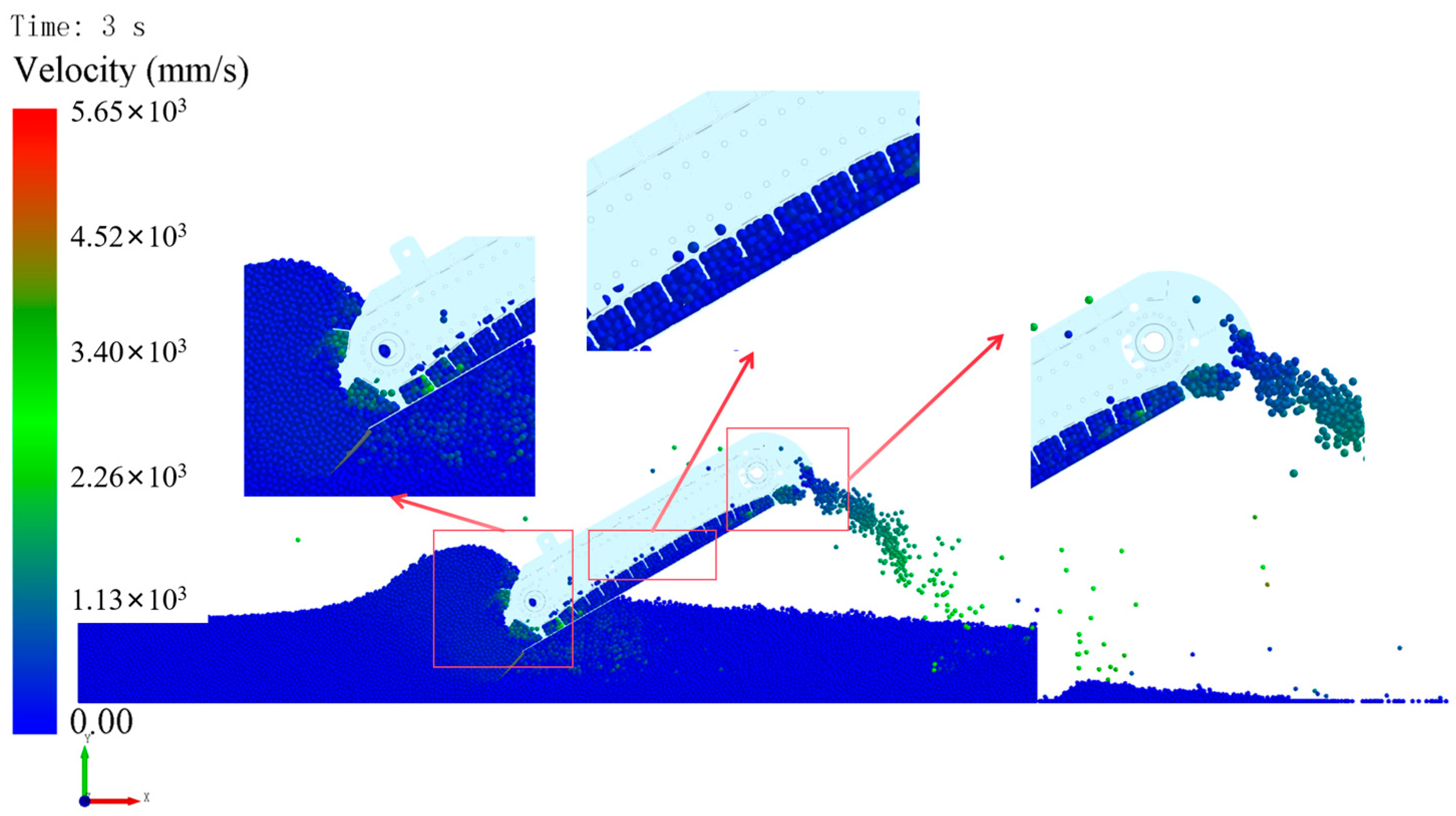
3.3. Simulation Tests and Results
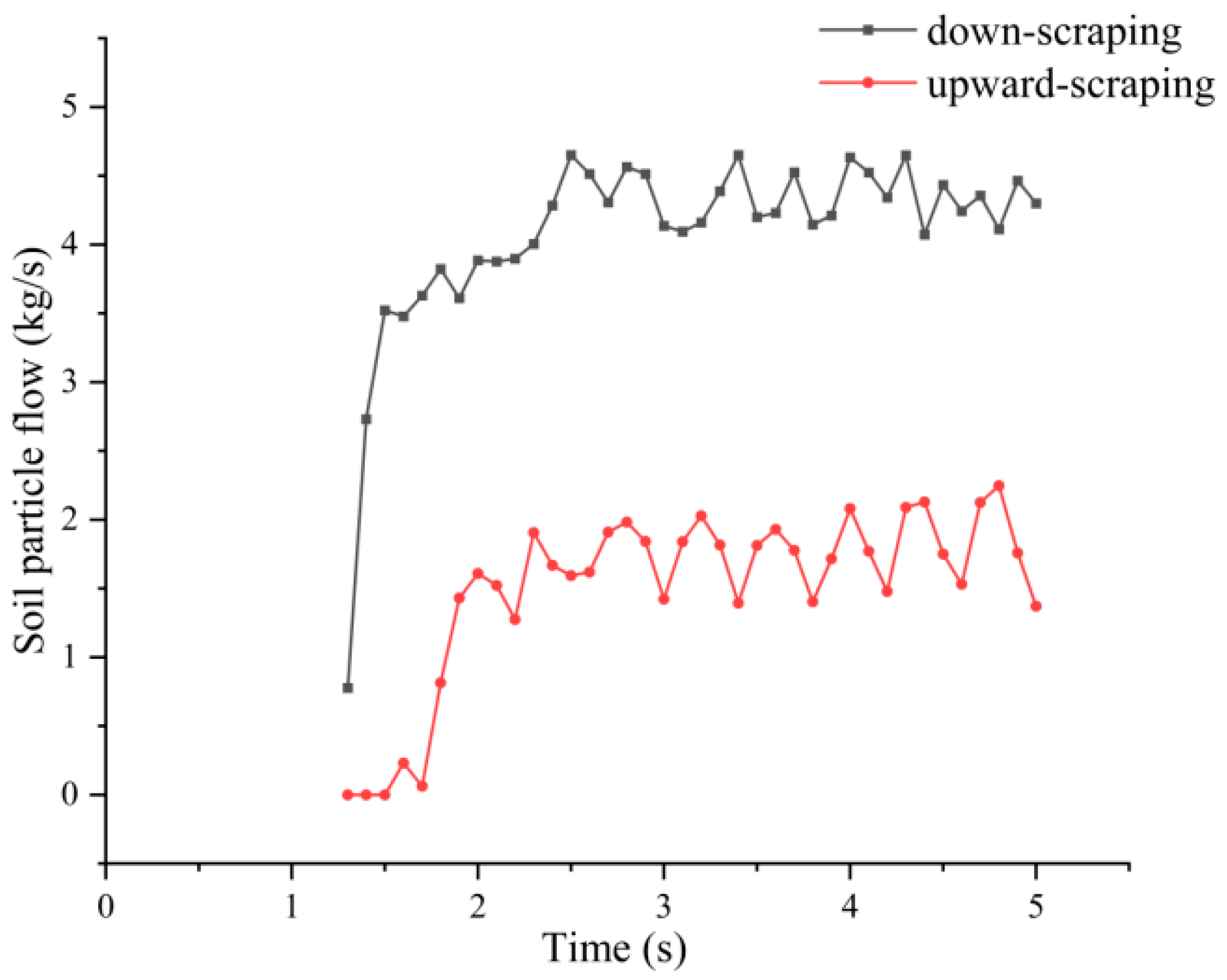
3.4. Analysis of Simulation Test Results
4. Test Validation
5. Conclusions
- (1)
- Using TRIZ theory to carry out “contradiction analysis” on the soil extraction shovel and putting forward a structural form that can realize the effective coupling of multi-schemes according to the characteristics of the scraper lifting and transporting chain-type film mulching device provides a guarantee for the smoothness, high efficiency, and reliability of the potato planting machine’s operation process. Based on the “object field analysis”, the cause-and-effect analysis of the scraper lifting device, through the invention of the principle of the final solution, improves the smoothness and economy of the whole machine and solves the problem of poor lubrication of the sprocket–chain in the lifting system in the process of operation.
- (2)
- Combined with EDEM to simulate the soil covering simulation of the scraper lifting chain membrane mulching device before and after optimization, from the starting shovel crushing performance and soil quality to analyze and measure the effect of the improvement, the simulation results show that: the innovative design of the curved surface shovel soil upgrading effect is good. Applying the EDEM post-processing Selection module, it was calculated that the lower scraper conveyor soil flow rate was increased by a factor of three.
- (3)
- The results of the soil tank performance comparison test show that under the same soil conditions and operating parameters, the improved membrane mulching device has a simple structure, low power consumption, good working performance of all components, good soil crushing effect during planting operations, fast flow speed, test probability of congestion of about 10%, and low congestion, and the whole membrane surface mulching quantity has been improved by 47.5%. After optimization and improvement, the standard requirements of dryland potato seedling strip mulching planting technology on mulching parameters have been reached, and the innovative and optimized working structure combination is of great significance for dryland potato yield on the Loess Plateau.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Adekoya, O.B.; Oliyide, J.A.; Yaya, O.S.; Al-Faryan, M.A.S. Does oil connect differently with prominent assets during war? Analysis of intra-day data during the Russia-Ukraine saga. Resour. Policy 2022, 77, 102728. [Google Scholar] [CrossRef]
- Pereira, P.; Bašić, F.; Bogunovic, I.; Barcelo, D. Russian-Ukrainian war impacts the total environment. Sci. Total Environ. 2022, 837, 155865. [Google Scholar] [CrossRef]
- Khodadadi, A.; von Buelow, P. Design exploration by using a genetic algorithm and the Theory of Inventive Problem Solving (TRIZ). Autom. Constr. 2022, 141, 104354. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Liu, J.; Li, Y.; Zhao, Y.; Liu, X.; Guan, L.; Liu, G. Chinese pepper picking tool designs and evaluations based on the TRIZ theory and the triangular fuzzy number. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017. [Google Scholar]
- Wang, J. Ecological Design of Silage Equipment Based on Innovative Method. Ph.D. Thesis, University of Jinan, Jinan, China, 2019. [Google Scholar]
- Wang, J.W.; Zhang, J.M. Gil-Lafuente. Research on Innovative Design and Evaluation of Agricultural Machinery Products. Math. Probl. Eng. 2019, 2019, 8179851. [Google Scholar] [CrossRef]
- Sun, W.; Liu, X.; Zhang, H.; Wang, H.; Tian, B. Design of potato casingsoil planter in all-in-one machine combined with fertilizing, sowing, ridging, complete film mulching and planting line covering. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2017, 33, 14–22, (In Chinese with English Abstract). [Google Scholar]
- Putri, N.T.; Sutanto, A.; Bifadhlih, N. The improvement of thresher design by using the integration of TRIZ and QFD approach. Int. J. Product. Qual. Manag. 2018, 25, 459–479. [Google Scholar] [CrossRef]
- Gao, G.; Ma, S. Improvement of transplanting manipulator for potted flower based on discrete element analysis and Su-field analysis. Editor. Off. Trans. Chin. Soc. Agric. Eng. 2017, 33, 35–42. [Google Scholar]
- Chen, S.; Kamarudin, K.M.; Yan, S. Analyzing the Synergy between HCI and TRIZ in Product Innovation through a Systematic Review of the Literature. Adv. Hum.-Comput. Interact. 2021, 2021, 6616962. [Google Scholar] [CrossRef]
- Luo, B.; Zhang, J. Design and Research of Prickly Pear Picking Machine Based on TRIZ and AD Theory. J. Agric. Mech. Res. 2023, 45, 24–29. [Google Scholar]
- Sauli, S.A.; Ishak, M.R.; Mustapha, F.; Yidris, N.; Hamat, S. Hybridization of TRIZ and CAD-analysis at the conceptual design stage. Int. J. Comput. Integr. Manuf. 2019, 32, 890–899. [Google Scholar] [CrossRef]
- Xing, H.; Gang, H.; Jia, D. Improved design and test on collecting wagon of rectangular bale based on ARIZ algorithm. Trans. Chin. Soc. Agric. Mach. 2016, 47, 254–260. [Google Scholar]
- Liu, A.; Lu, S.; Zhang, Z.; Li, T.; Xie, Y. Function recommender system for product planning and design. CIRP Ann.-Manuf. Technol. 2017, 66, 181–184. [Google Scholar] [CrossRef]
- Qu, H.; Shi, L.; Xin, S. Design and experiment of flax precision hole-seedind combined operation machine with soil storage device. J. China Agric. Univ. 2022, 27, 186–197. [Google Scholar]
- Shi, L.; Sun, W.; Zhao, W.; Yang, X.; Feng, B. Parameter determination and validation of discrete element model of seed potato mechanical seeding. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2018, 34, 35–42, (In Chinese with English Abstract). [Google Scholar]
- Shi, L.; Zhao, W.; Sun, W. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2017, 33, 181–187, (In Chinese with English Abstract). [Google Scholar]
- Liu, W.; He, J.; Li, H. Calibration of Simulation Parameters for Potato Minituber Based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135+142. [Google Scholar]
- Dun, G.; Chen, H.; Ji, W. Finite element analysis of chisel-type deep shovel based on EDEM and SolidWorks Simulation. J. Henan Agric. Univ. 2017, 51, 678–682. [Google Scholar]
- Wang, X.; Hu, H.; Wang, Q. Calibration Method of Soil Contact Characteristic Parameters Based on DEM Theory. Trans. Chin. Soc. Agric. Mach. 2017, 48, 78–85. [Google Scholar]
- Sun, H. Design and Experimental Research on Transporting and Separating Device of Lifting Chain Potato Digger. Ph.D. Thesis, Northeast Agricultural University, Harbin, China, 2019. [Google Scholar]
- Wei, Z.; Han, M.; Su, G.; Zhang, H.; Li, X.; Jin, C. Design and Experiment of a Bagging and Unloading Potato Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2023, 54, 92–104. [Google Scholar]
- Wang, X.; Yang, D.; Liu, M.; Li, Y.; Chen, X.Y.; Cheng, Z.W. Parameter Optimization and Experiment of Picking Device of Self-propelled Potato Collecting Machine. Trans. Chin. Soc. Agric. Mach. 2023, 54, 20–29. [Google Scholar]
- GB/T 25417-2010; Technical Specification of Quality Evaluation for Potato Planter. National Standards of the Republic of China: Beijing, China, 2010.
- NY/T 1415-2021; Technical Specification for Quality Evaluation of Potato Planters. National Agricultural Machinery Standardization Technical Committee Agricultural Mechanization Sub-Technical Committee: Beijing, China, 2021. Available online: https://www.chinesestandard.net/PDF/English.aspx/NYT1415-2021 (accessed on 1 April 2024).
- NY/T 987-2006; Operation Quality Grain Film-Covering Hill-Drop Dril. National Agricultural Machinery Standardization Technical Committee: Beijing, China, 2006. Available online: https://www.chinesestandard.net/PDF/English.aspx/NYT987-2006 (accessed on 1 April 2024).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Improved Parameters | Deteriorating Parameters |
|---|---|
| 26 Quantity of a Substance or Thing | |
| 10 Force | 14 The principle of surfacing |
| 29 Pneumatic and hydraulic construction principles | |
| 18 Principle of mechanical vibration | |
| 36 Phase change principle |
| Program Number | Program Description | Schema | Programmatic Evaluation | Order |
|---|---|---|---|---|
| 1 | The surface of the shovel is designed as a curved surface, which improves the damping performance and provides the effect of breaking up the soil. |  | Easy to implement, low cost. | 1 |
| 2 | Blowers are used to blow the soil into the scraper lift chain. |  | Replaced the source of the problem—earth extraction shovel—easy to implement, introduces new problems. | 3 |
| 3 | Vibrating motor to provide the excitation source for the shovel. |  | Easy to implement, slightly more expensive. | 2 |
| 4 | The vibration is realized by a crank linkage mechanism that drives the earth moving shovel in a reciprocating motion. |  | Relative complexity and introduction of new issues. | 4 |
| Material | Material Parameters | Contact Parameters | |||||
|---|---|---|---|---|---|---|---|
| Poisson Ratio | Shear Modulus/MPa | Density /(kg·m−3) | Collision Form | Restitution Coefficient | Static Friction Coefficient | Dynamic Friction Coefficient | |
| Soil | 0.3 | 100 | 2680 | Particle–Particle | 0.3 | 0.5 | 0.3 |
| 65Mn | 0.28 | 3.5 × 104 | 7850 | Particle–Steel | 0.3 | 0.3 | 0.2 |
| Steel | 0.25 | 1.0 × 107 | 7800 | ||||
| Parameters | Numerical Value |
|---|---|
| Normal contact stiffness/(N·m2) | 108 |
| Tangential contact stiffness/(N·m2) | 5 × 107 |
| Critical normal stress/Pa | 30,000 |
| Critical tangential stress/Pa | 15,000 |
| Bonding radius/mm | 5.4 |
| Test Indicators | Improved Device Value/Mean Deviation | Original Installation Value/Mean Deviation |
|---|---|---|
| Probability of machine congestion | 10% | 30% |
| Mulching of the entire membrane surface | 21.06 kg/1.06 kg | 14.27 kg/1.12 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Li, H.; Sun, W.; Li, H.; Liu, X.; Sun, G.; Lu, Y.; Chen, Y.; Xing, W. Optimization of Potato Planter Soil Lifting Device Based on TRIZ Theory. Agriculture 2024, 14, 1695. https://doi.org/10.3390/agriculture14101695
Zhang H, Li H, Sun W, Li H, Liu X, Sun G, Lu Y, Chen Y, Xing W. Optimization of Potato Planter Soil Lifting Device Based on TRIZ Theory. Agriculture. 2024; 14(10):1695. https://doi.org/10.3390/agriculture14101695
Chicago/Turabian StyleZhang, Hua, Hongling Li, Wei Sun, Hui Li, Xiaolong Liu, Gang Sun, Yonggang Lu, Yangzhou Chen, and Wei Xing. 2024. "Optimization of Potato Planter Soil Lifting Device Based on TRIZ Theory" Agriculture 14, no. 10: 1695. https://doi.org/10.3390/agriculture14101695