

Evaluation of the Functional Parameters for a Single-Row Seedling Transplanter Prototype



Abstract
1. Introduction
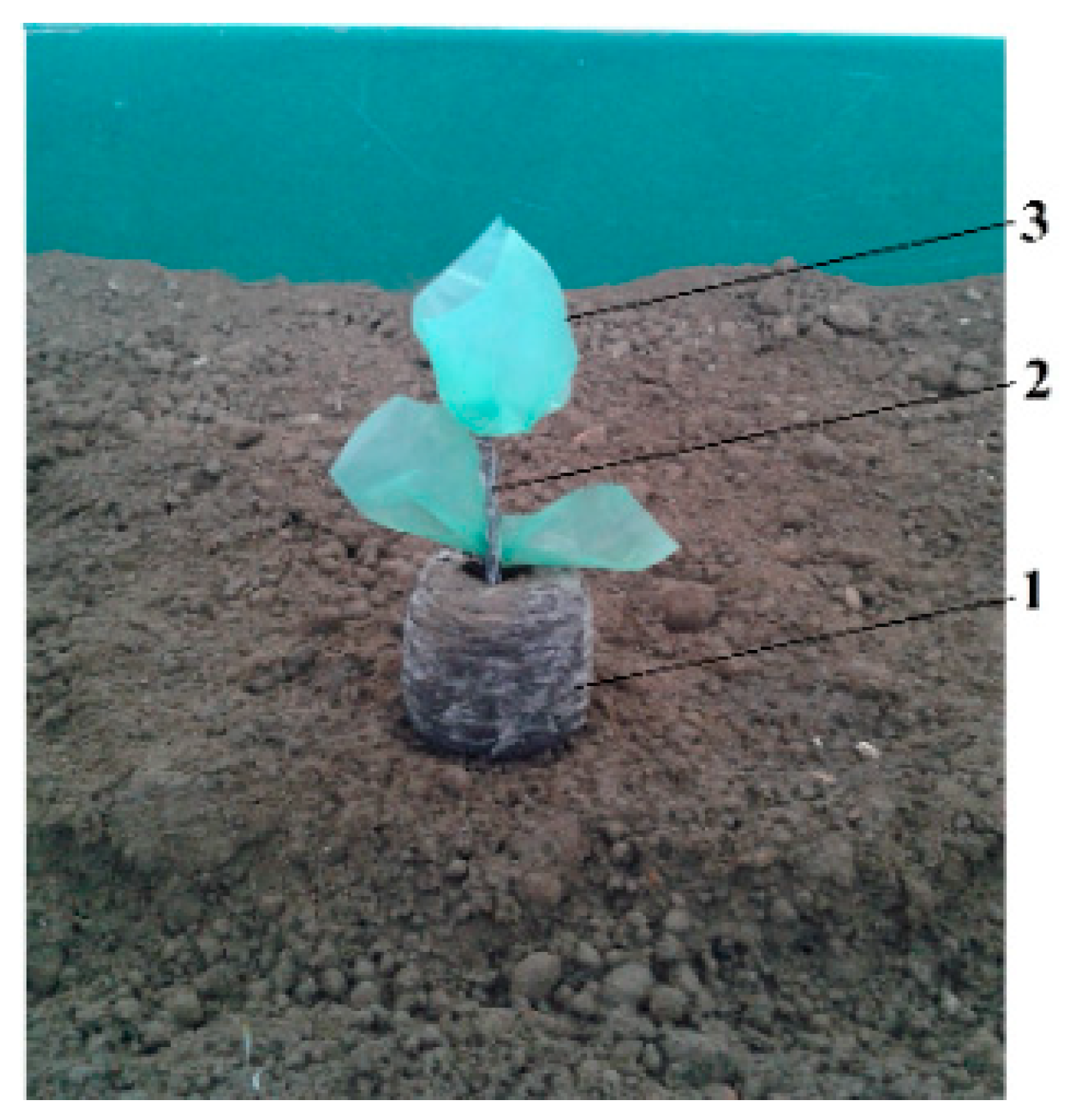
- Jiffy pellets seedling growing media have been used for decades for a diverse range of plants for the definite advantages of good workability, compatibility with almost all growing trays, high germination rate and shock-free transplanting. They have been utilized for automated transplanting of seedlings into pots or other growing media in greenhouses, but in this technology, they are intended for obtaining seedlings directly into the tray, used then for direct transplanting in the field. In addition to the constancy of dimensional parameters, an essential advantage for the horticultural micro-farm is the elimination of obtaining different recipes for substrate mixture [8,11,12], with all the inherent difficulties: disinfection of the components, dosing, substrate formation; the first stage is more difficult, due to the thermal or chemical operations required, which sometimes also affect the viability of the seedlings [13].
- The use of the aforementioned mechanically, pneumatically or electrically driven robotic systems for the extraction of seedlings with needles and push forks [7], with L-shaped rotating fingers [8], with clamp-type devices [14], as well as distribution devices with belt-conveyor type with cups [9,15], controlled by an electronic module [16], lead to high qualitative and functional parameters of planting, but with difficulties in operation and maintenance. In the case of the prototype intended for micro-farms in Romania, the solution to eliminate complicated and error-prone seedling extraction and transport systems was the use of exclusively gravitational extraction and multi-stage transport of seedlings with nutrient substrate. Due to the limits to which the substrate can withstand different stresses [17], the verification of Jiffy substrates to transport shocks validates the choice of this simplifying solution.
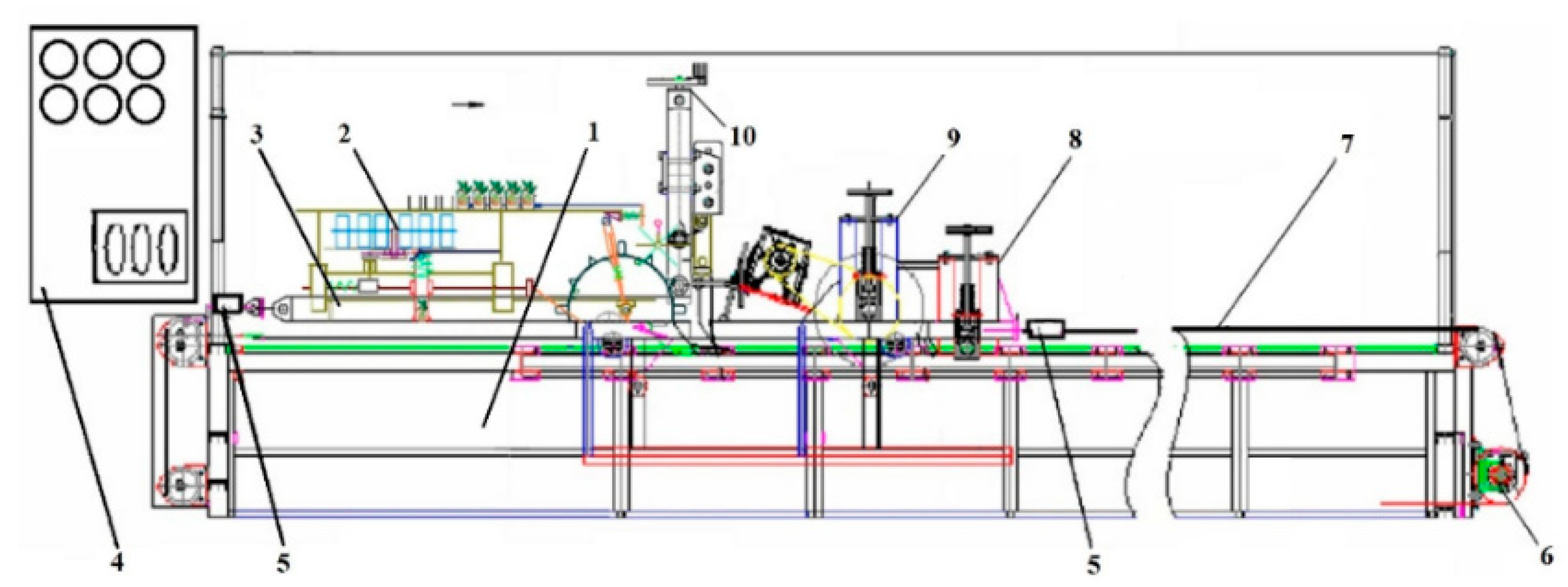
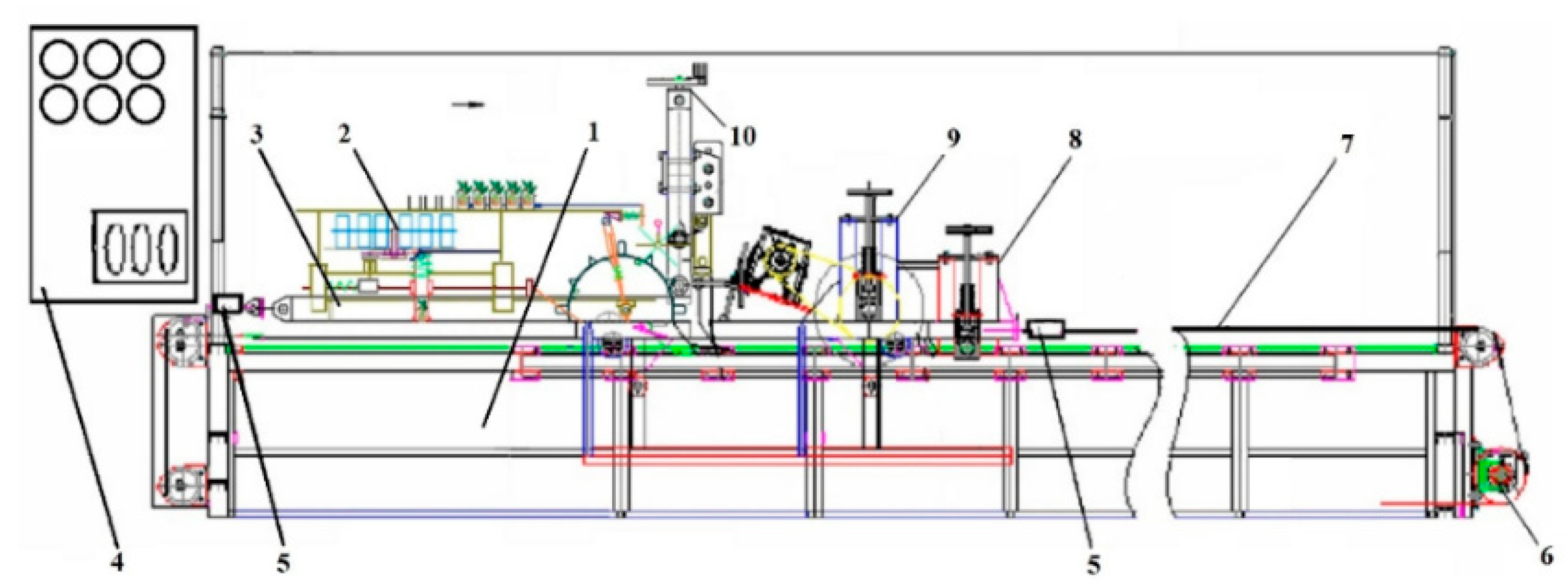
- Compared to feeding systems from existing high-productivity automatic planters with extraction from universal (Ferrari Growtech, Guidizzolo, Italy) [18] or specialized (Williames Pty Ltd., Warragul, VIC, Australia) [19] trays and transport with different types of conveyors belt types [20,21], the prototype under study comprises a rigid alveolar tray, constructively correlated with the distribution apparatus for simultaneously gravitational discharge of a whole row of seedlings. Thus, intermediate operations performed by third-party systems between the tray and the distribution device are eliminated.
- Existing automatic planters have either a conventional wheel-linked distribution mechanism [7] or an electronically controlled and electrically driven seedling feeding system, independent of the machine’s movement relative to the ground, based on RTK-GPS technology [22]. In both cases, a slip of the machine’s transport system relative to the ground occurs [23], which implies a variation in the distance between plants per row, greater in the first category. The slippage results in non-zero seedling velocities at soil entry, resulting in altered planting depth [24,25] tilting or damage. The designed transplanter has a planting apparatus drive system allowing the zero-speed seedling’s planting in relation to the soil, correlated with the slipping of the planting wheel [26].
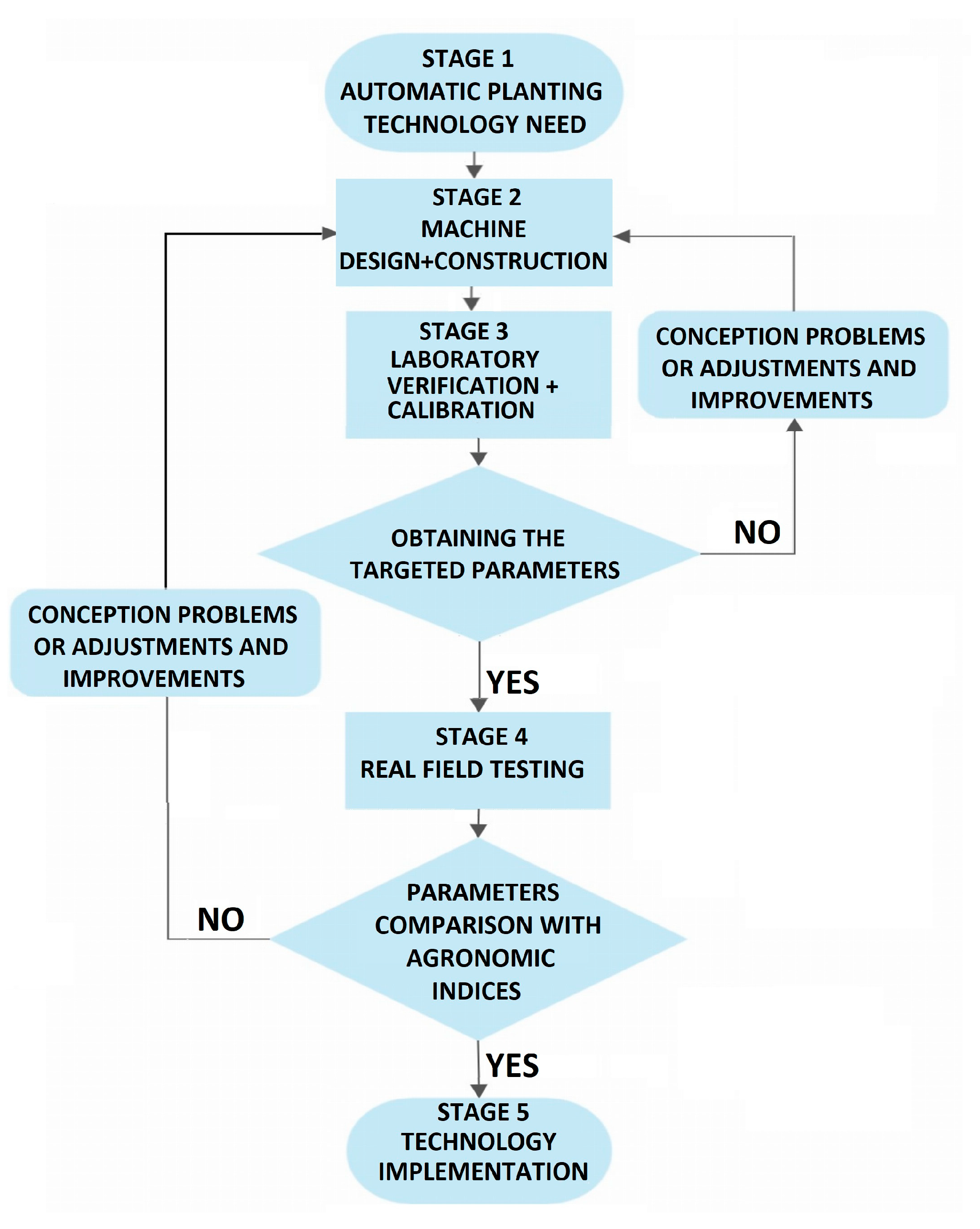
- –
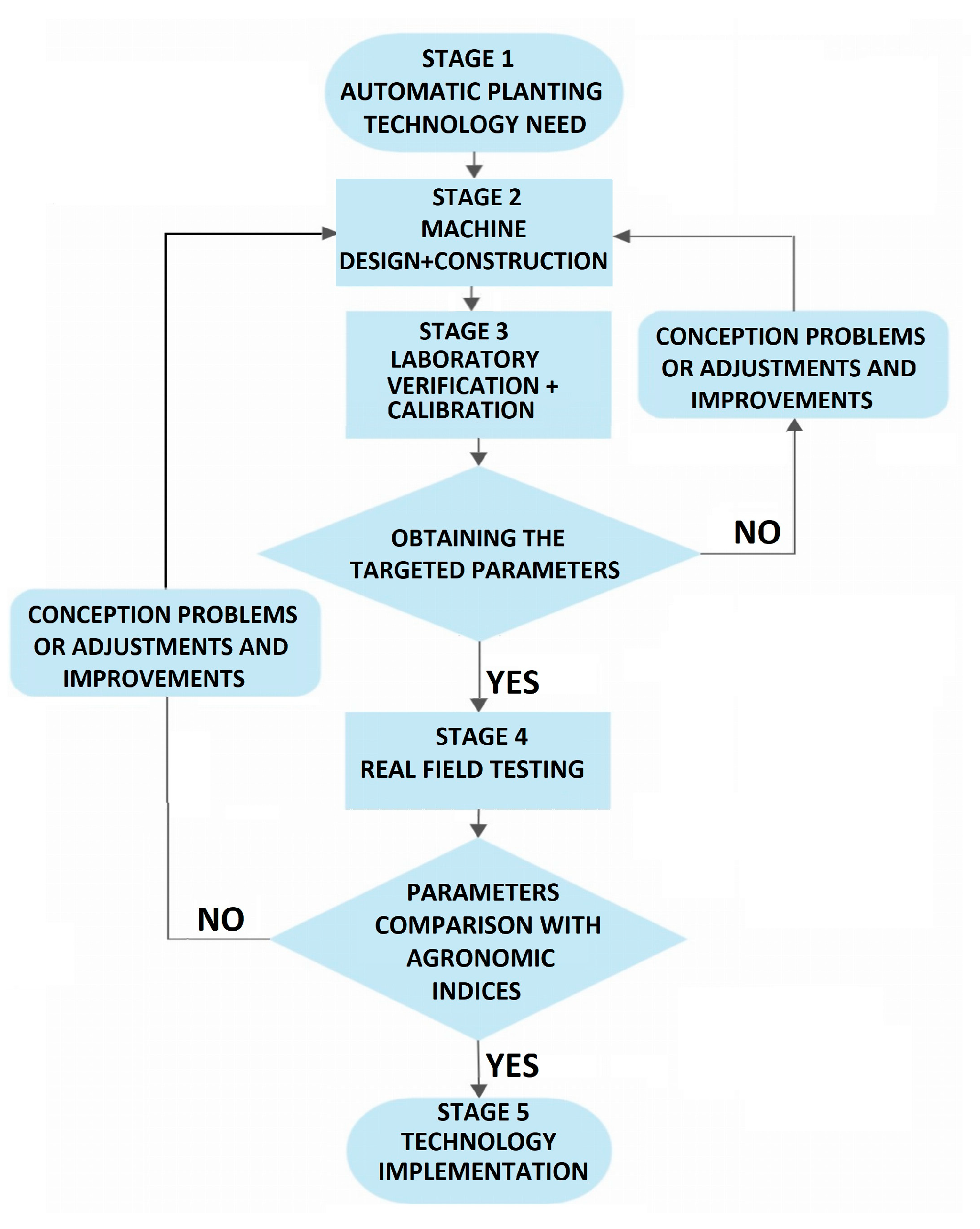
- Determining the need for automated seedling planting technology adapted for Romania;
- –
- Design and construction of the machine;
- –
- Laboratory verification of its operation and preliminary calibration of the main working parameters (working speed and planting time);
- –
- Testing under real conditions in the field, with determination of qualitative, energy and economic parameters, for comparison with current agronomic standards;
- –
- Technology implementation in practice.
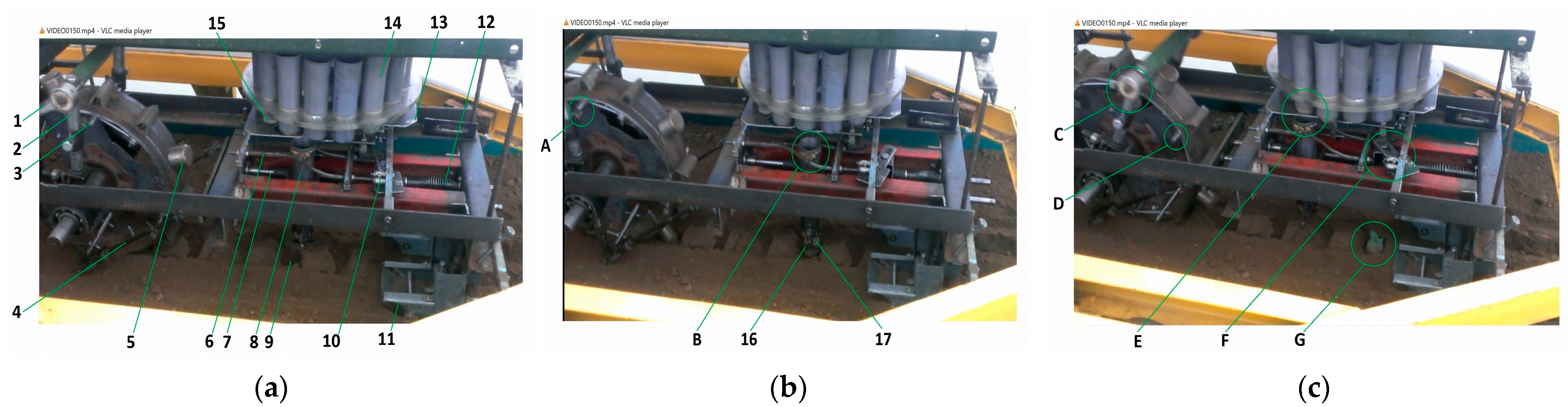
- Verification of the actual performance of the main operations of the machine: seedling feeding, distribution, insertion and fixing of the seedlings in the soil;
- To determine the range of feasible working speeds and to check that certain quality and energy indicators are within the agronomic limits.
2. Materials and Methods
2.1. Seedling Feeding Times
- –
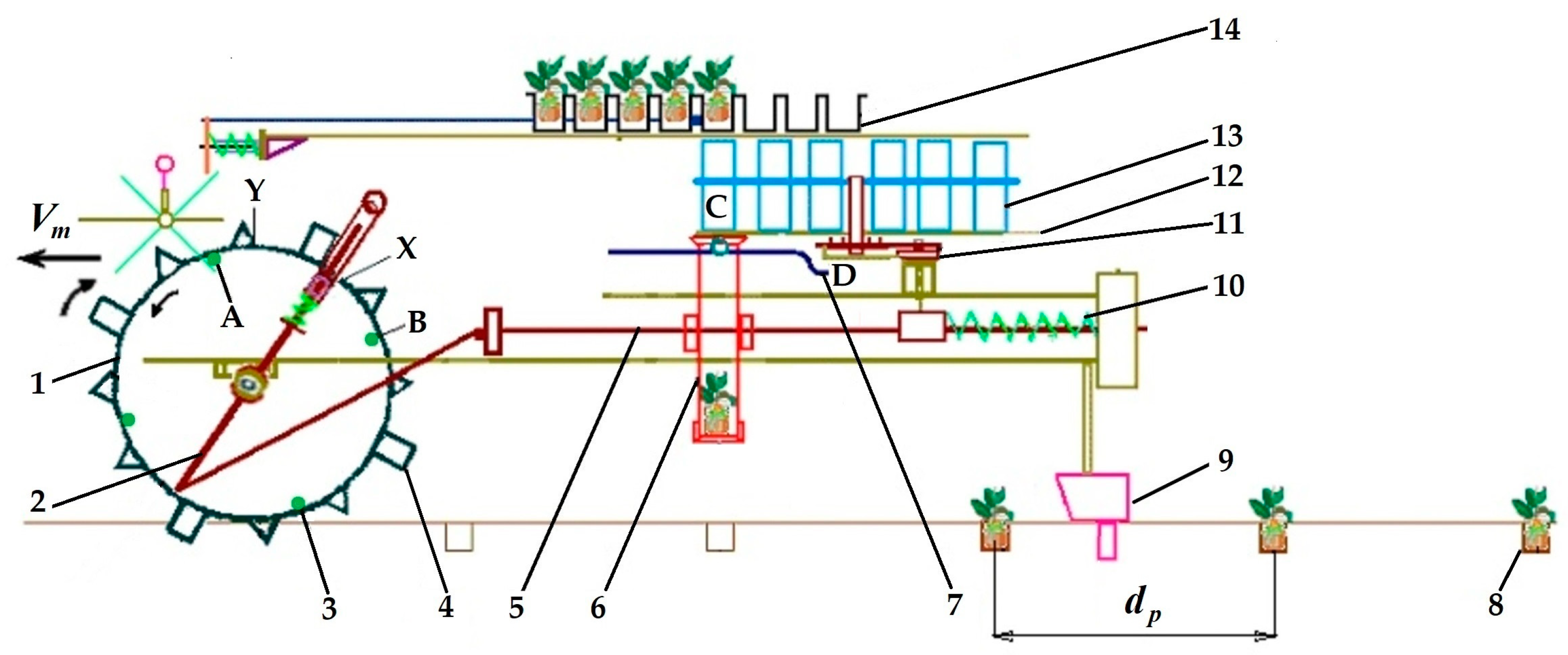
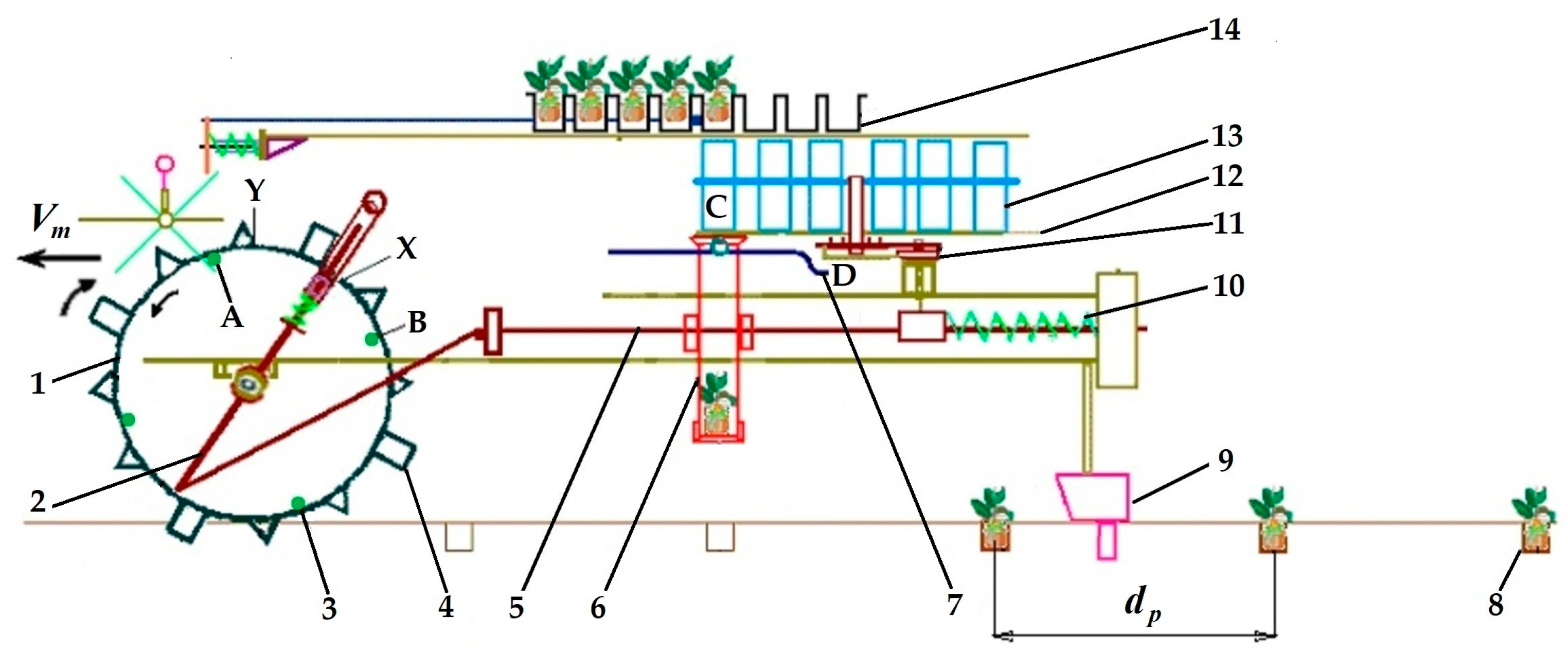
- Movement I is the return action of the planting device from the seedling release position to the rest position for feeding (under the slot of the holding-release screen of the distribution apparatus), partially deployed during the return time (YX arc);
- –
- Movement II is transporting the seedlings by the planting machine over the same distance during transport time and during the period of initiation of the return movement of the planting device (YA arc).
- –
- Return time trev, in which two separate movements occur: that of the drive rod of the planter wheel, with Vm speed on the YA arc, and the completion of the YX arc by the oscillating driving lever, in the opposite direction relative to the wheel movement;
- –
- Pause time t0, corresponding to the control rod peripheral movement on the BX arch, with Vm speed;
- –
- Transport time tt corresponds to the movement of the control rod and oscillating lever on the XY arc, with a peripheral velocity equal to the Vm speed.
Planting Device Supplying Time
- –
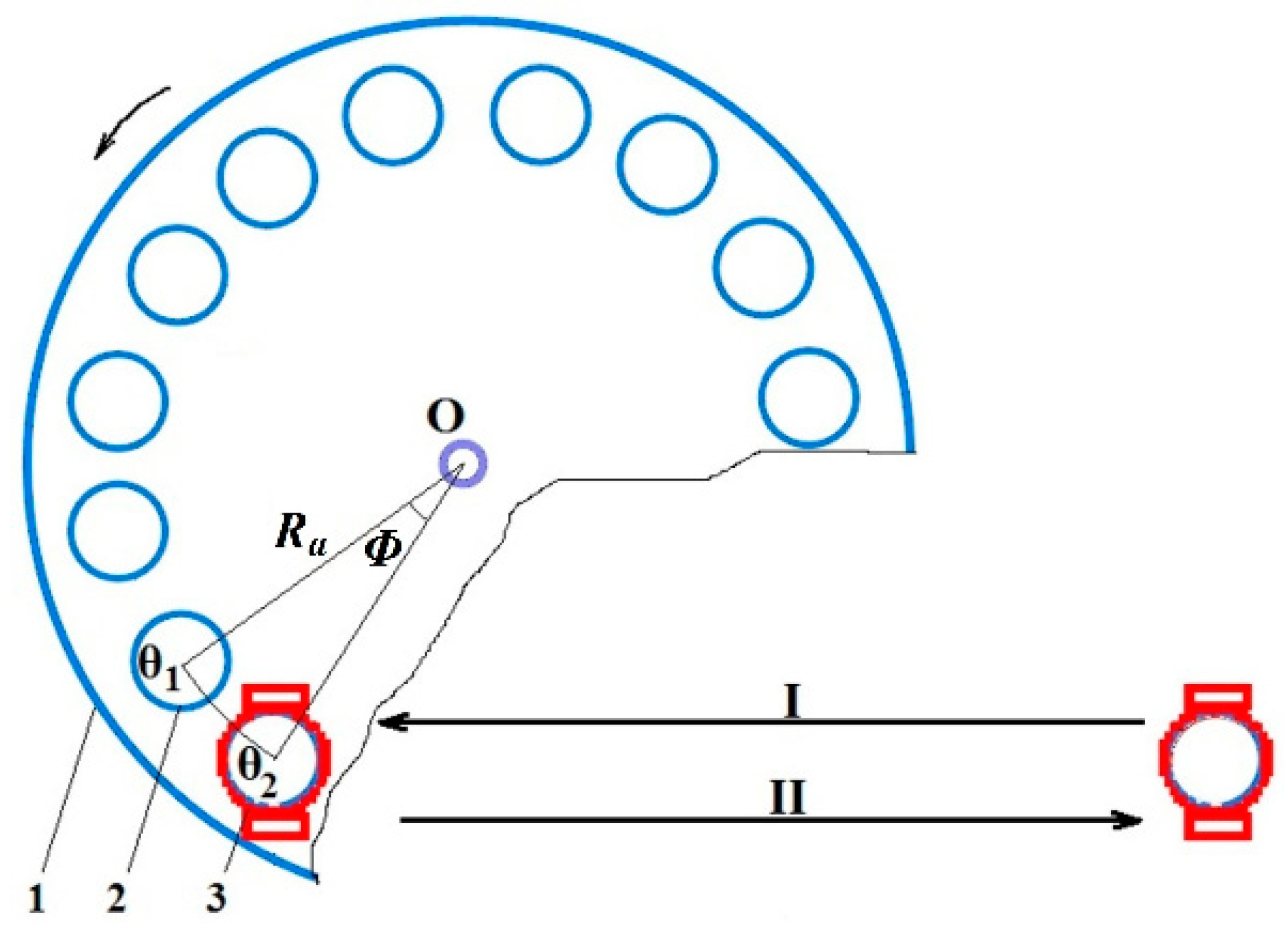
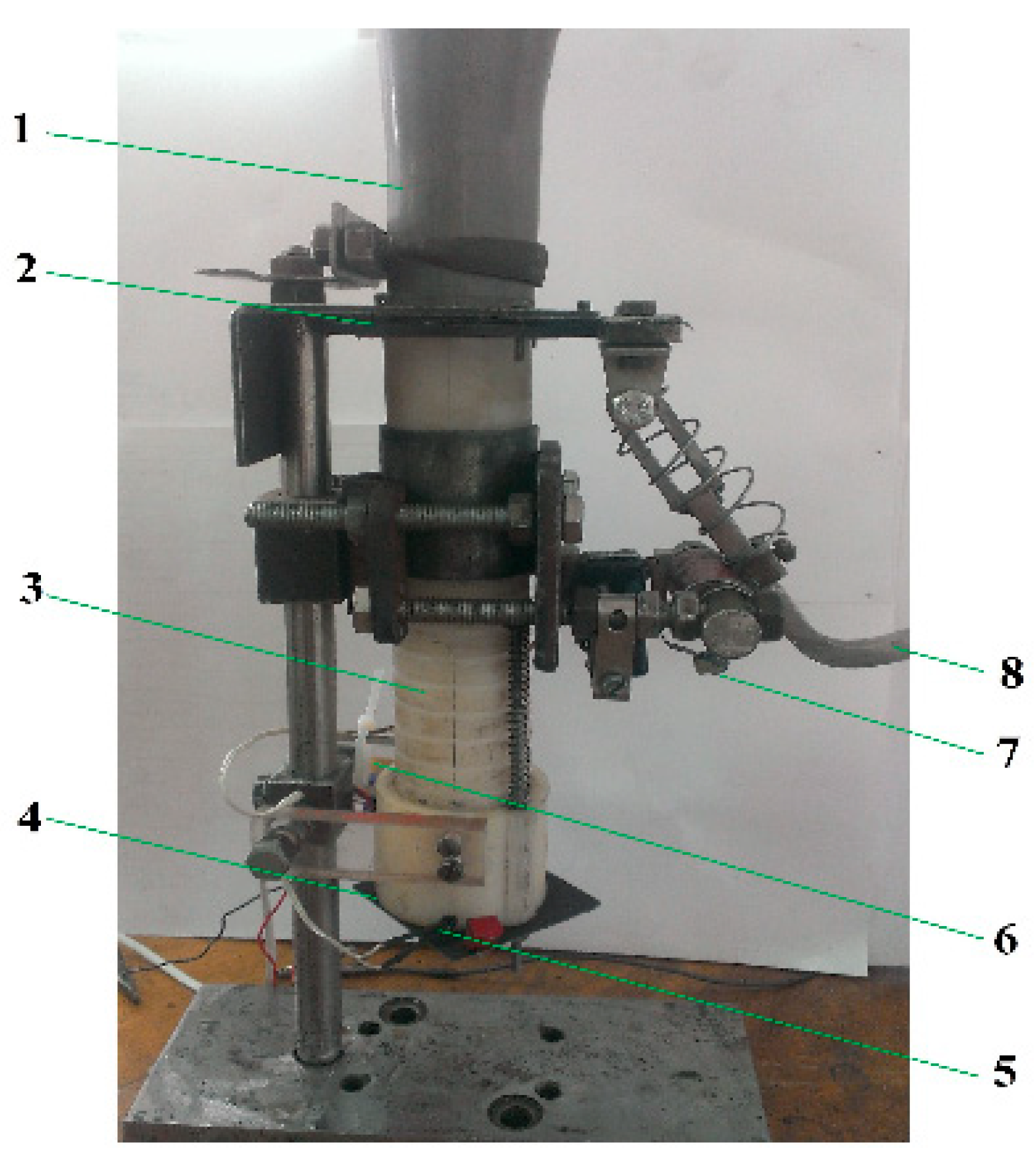
- tper—The permutation time of the seedling receiving tube from position θ1 to θ2 (Figure 2);
- –
- tcd—Time of gravitational fall of the seedling from the receiving tube into the planting device, s.
2.2. Working Speed
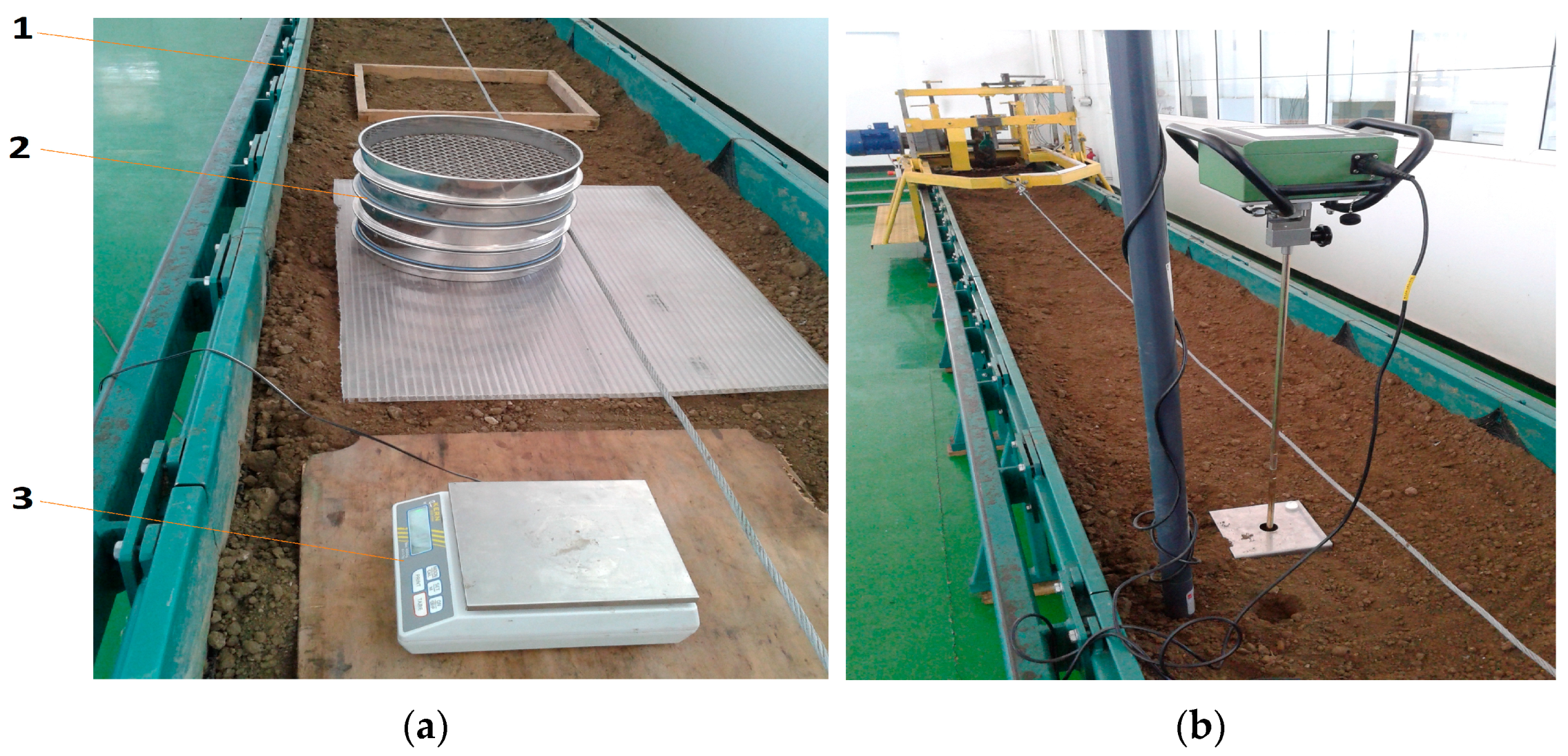
2.3. Soil Bin Studies
- –
- y = z − 1 is the number of intervals between z planted seedlings.
- –
- dp—Distance between plants per row, m.
- –
- sw is the number of the misplanted seedlings.
- –
- s is the total number of planted seedlings.
3. Results
3.1. Stationary Collected Data
- –
- V is the working transplanter speed, m/s;
- –
- ω is the rotational speed, rev/s;
- –
- R is the planter wheel radius, m.
3.1.1. The Planting Device Return Time Determination
3.1.2. The Distribution Apparatus Permutation Time Determination
3.1.3. The Gravitational Fall Time Determination
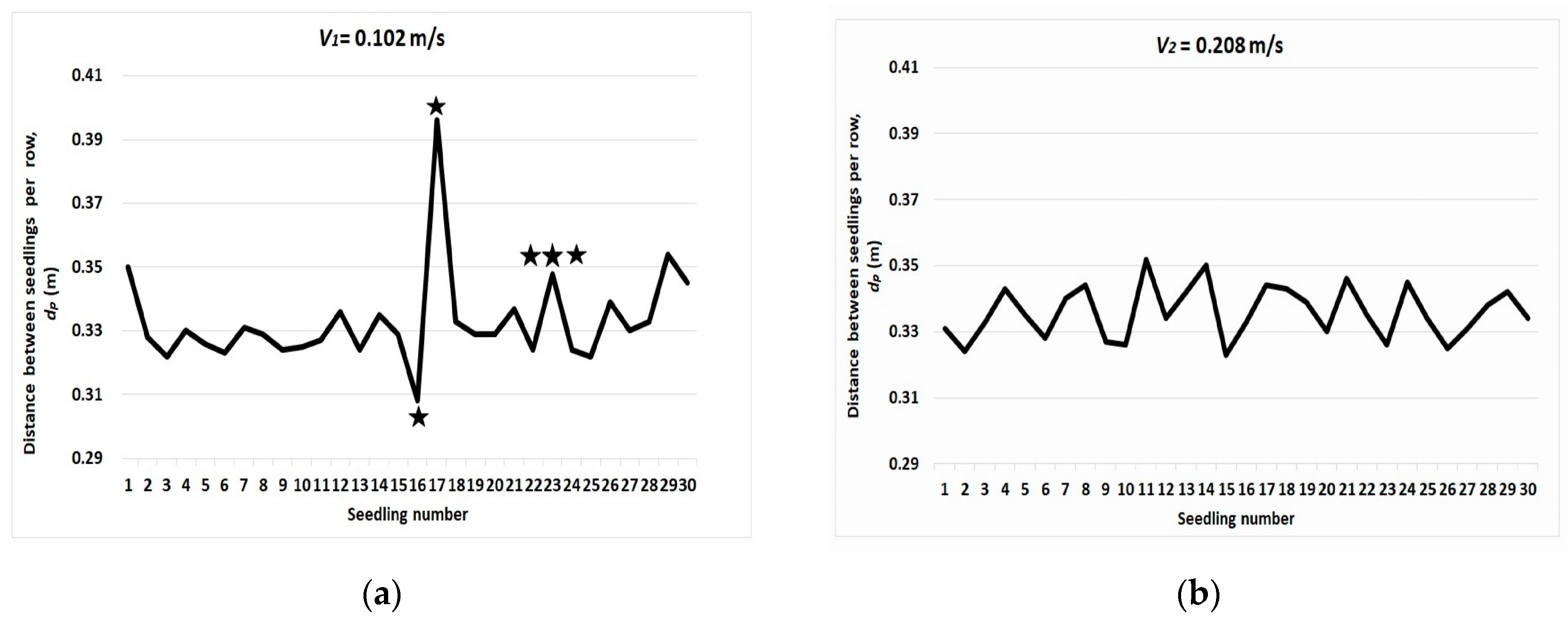
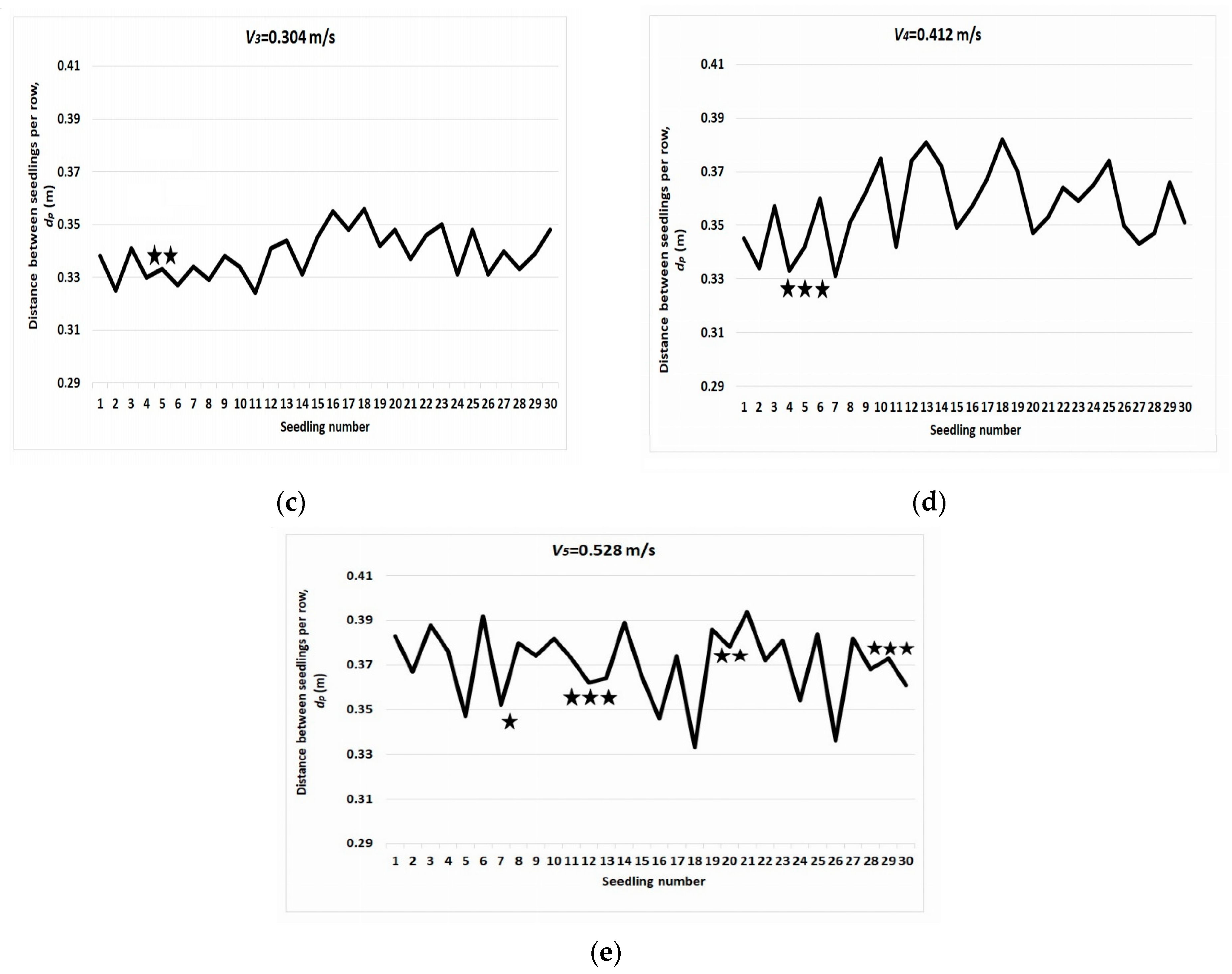
3.2. Soil Bin Test Data
3.3. Wheel Planter Construction Parameters
4. Discussion
Future Research Directions
- –
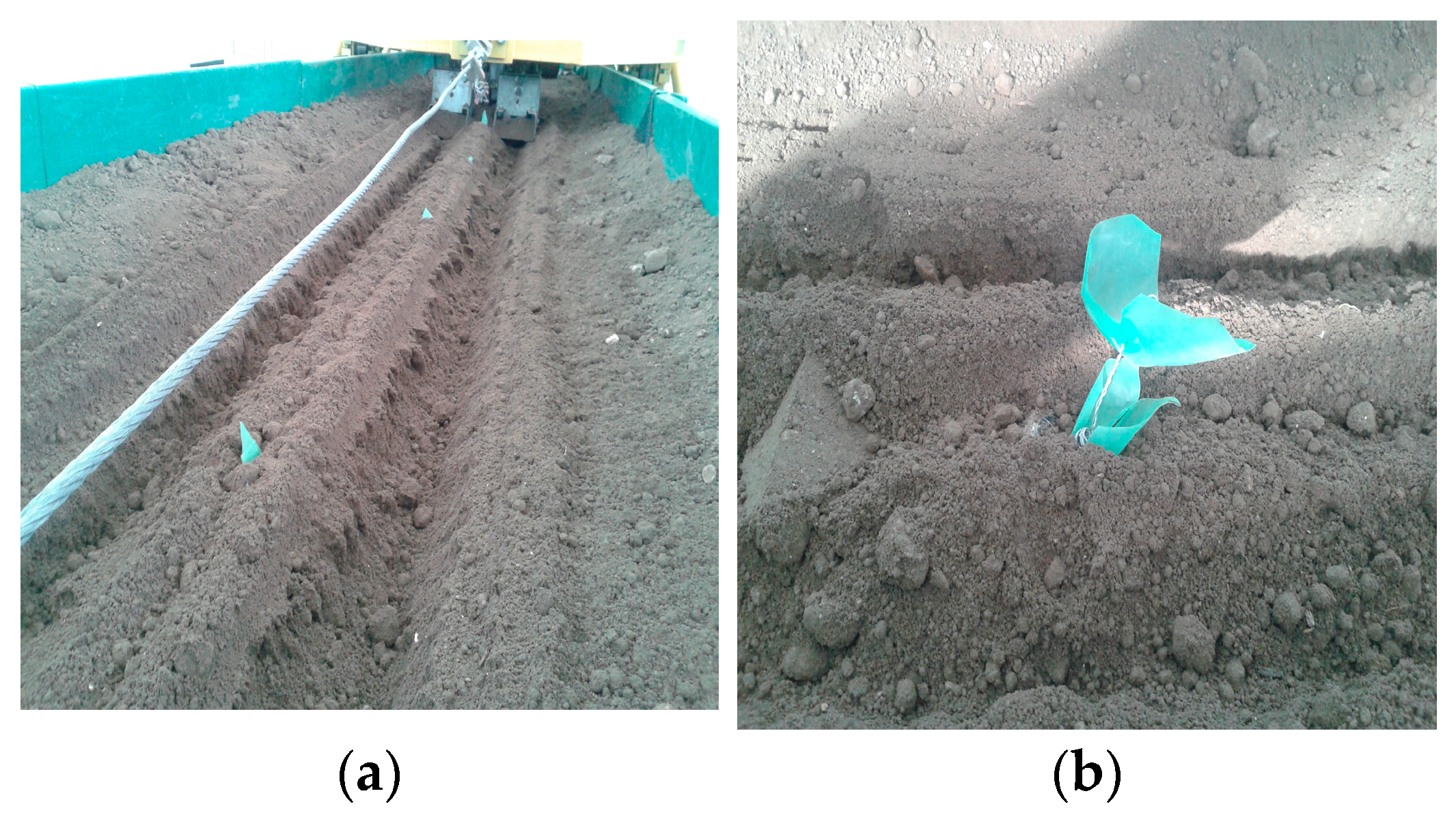
- The slippage is exacerbated due to the soil structure damage after repeated crossings;
- –
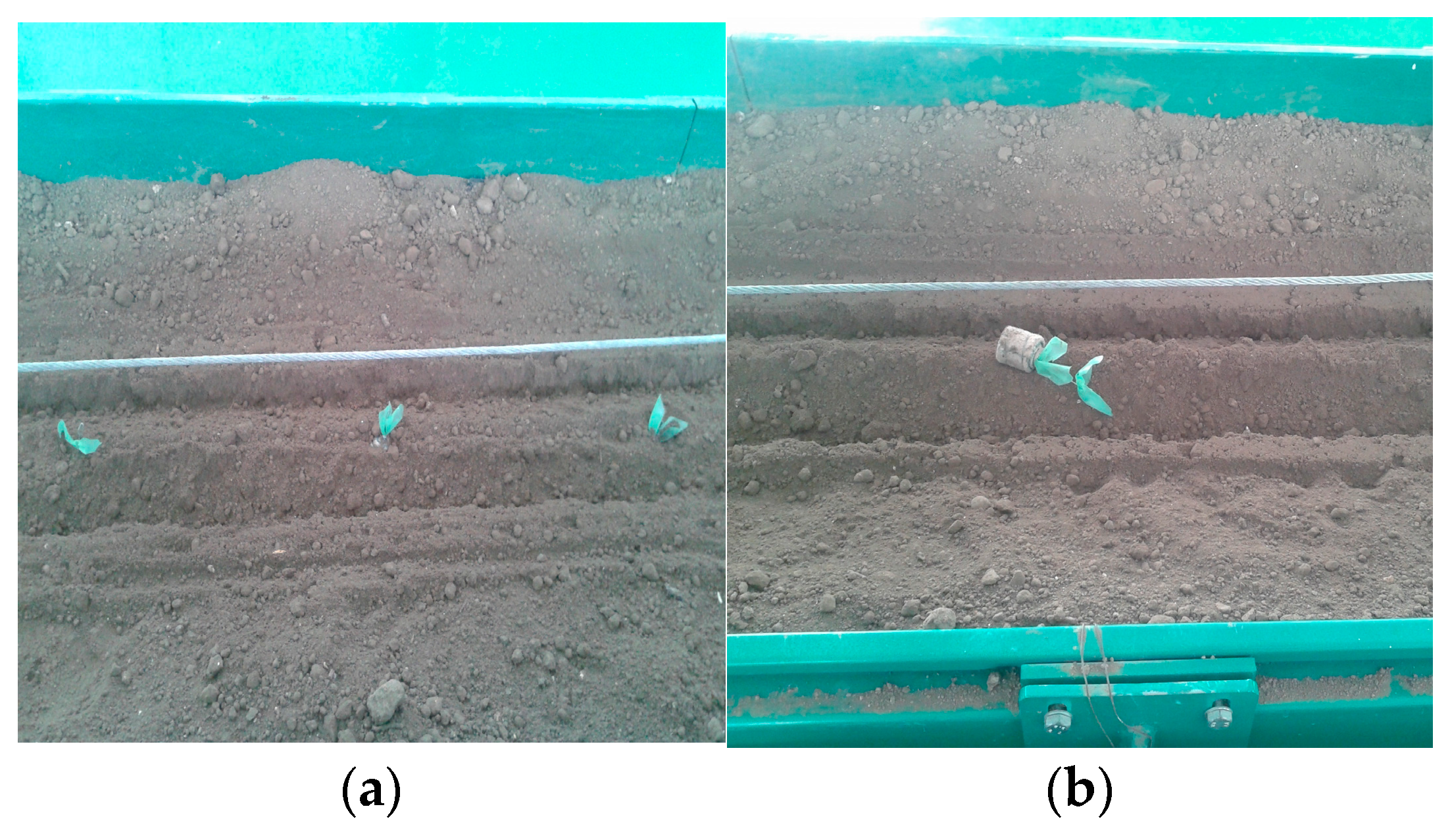
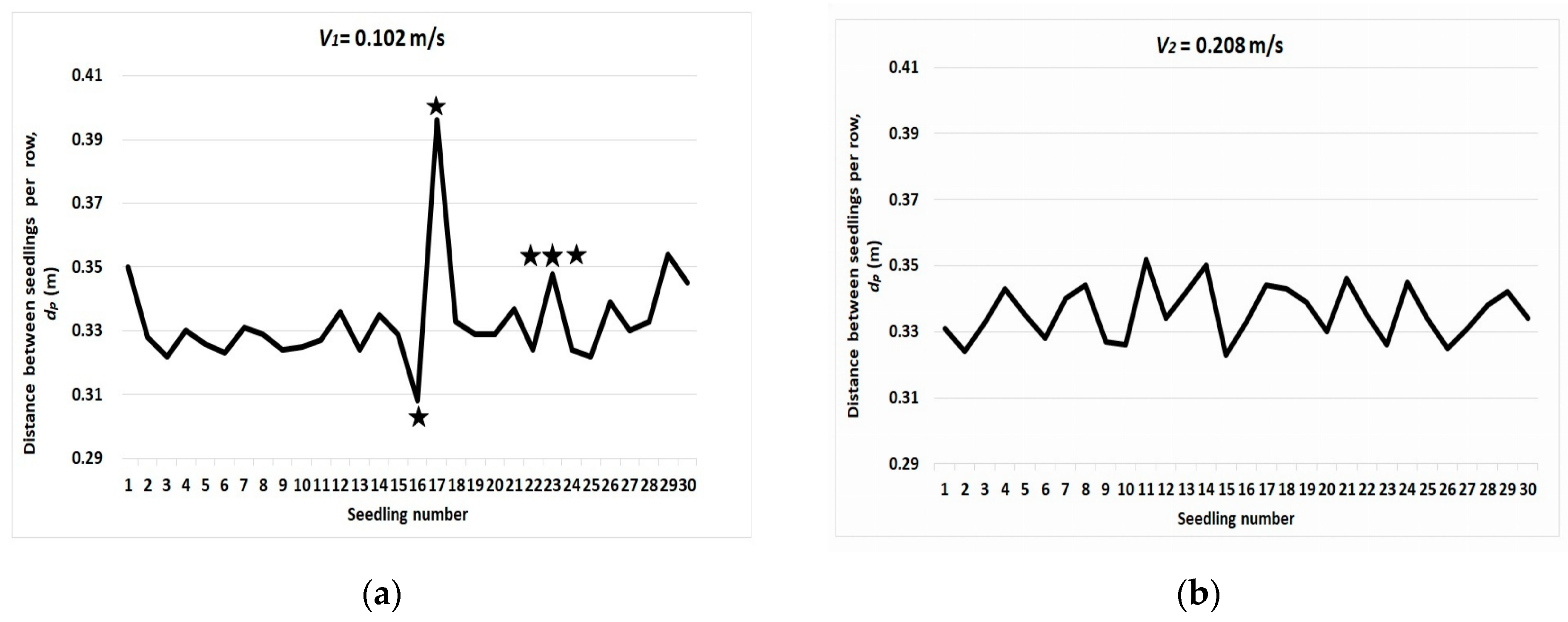
- Some events, such as misplanted seedlings, have a higher frequency at the ends of the run (where the soil has more unevenness: moisture, compaction, different grain sizes), observable in the context of a bin run with 10 seedlings planted.
5. Conclusions
- The results indicate that the chosen speeds, which are below the upper limit of the calculated theoretical working speed, allow for the prototype’s testing, which provides indications of the correctness of the planting operation under near-real conditions.
- The chosen speeds at which the planting parameters comply with agronomic indicators are comparable to those of existing automatic planting machines.
- The working speeds suitable for this configuration of the automatic seedling transplanter prototype are within the range given by the speeds V3 and V4, respectively, 0.304 and 0.412 m/s, which have demonstrated the fulfillment of the agronomic indicators imposed by the literature.
- The prototype achieves seedling planting frequencies of 0.899 and 1.157 s−1, 53.94 and 69.42 seedlings per minute at the mentioned speeds.
- –
- Some low mass inertia components, such as the distribution apparatus disc, should be made to avoid malfunctions at low speeds;
- –
- The shape of the spurs should be modified (e.g., by adopting a double-circular arc profile design) to obtain appropriate openings over the whole speed range;
- –
- The anti-slip profiles need resizing and reconfiguration to minimize planter wheel slip and improve self-cleaning of soil that tends to stick;
- –
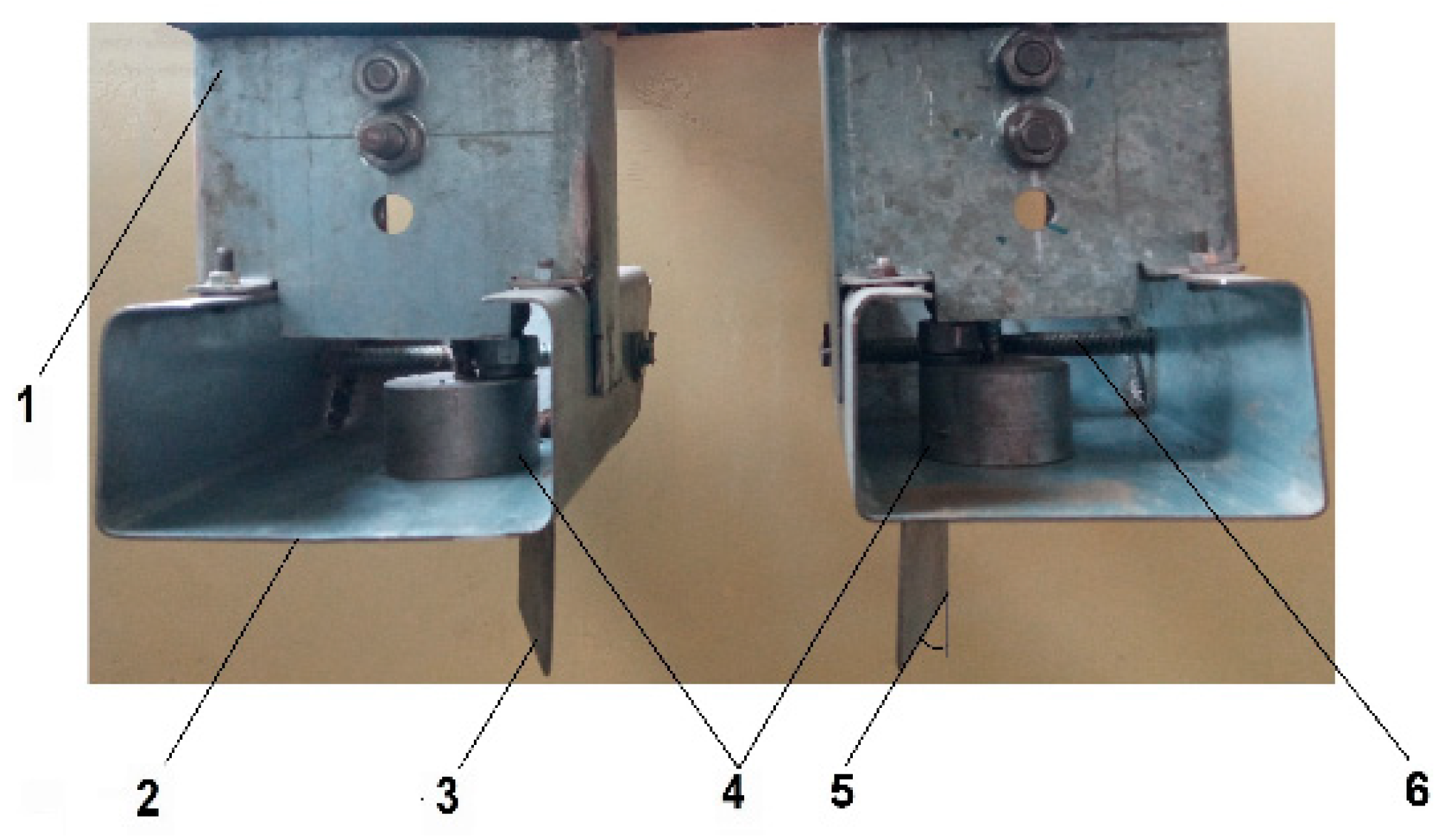
- The setting of the fixing skid wings must be correlated with the soil type, moisture content, and working speed, a priority being establishing an appropriate relationship for effective adjustment.
6. Patent
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B

Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lower Diameter [mm] | Upper Diameter [mm] | Height [mm] | Weight (Wet) [g] |
|---|---|---|---|
| 39.86 ± 0.1160 | 38.64 ± 0.1973 | 41.02 ± 0.1205 | 44.36 ± 0.2093 |
| Seedling Height [mm] | Stem Height [mm] | Substrate Height [mm] | Substrate Diameter [mm] | Weight [g] | Foliage Diameter [mm] | Leaves Number [pcs.] |
|---|---|---|---|---|---|---|
| 158 ± 0.0345 | 80 ± 0.032 | 41.02 ± 0.1205 | 39.86 ± 0.1160 | 58.6 ± 0.6432 | 45 ± 1.894 | 2–4 |
| Initial Values | Transport I h1 = 185 mm | Transport II h2 = 228 mm | Transport III h3 = 80 mm | ||||
|---|---|---|---|---|---|---|---|
| Lower Diameter [mm] | Height [mm] | Lower Diameter [mm] | Height [mm] | Lower Diameter [mm] | Height [mm] | Lower Diameter [mm] | Height [mm] |
| 39.86 ± 0.1160 | 41.02 ± 0.1205 | 41.11 ± 0.2374 | 40.28 ± 0.1411 | 41.53 ± 0.1129 | 38.88 ± 0.1569 | 42.80 ± 0.1039 | 37.10 ± 0.1767 |
Appendix D
| Return Time Speed Rotational/Working | trev1 (s) | trev2 (s) | trev3 (s) | trev4 (s) | trev5 (s) |
|---|---|---|---|---|---|
| ω1 = 0.47 rev/s V1 = 0.1 m/s | ω2 = 0.95 rev/s V2 = 0.2 m/s | ω3 = 1.42 rev/s V3 = 0.3 m/s | ω4 = 1.90 rev/s V4 = 0.4 m/s | ω5 = 2.38 rev/s V5 = 0.5 m/s | |
| 1 | 0.37 | 0.36 | 0.35 | 0.35 | 0.34 |
| 2 | 0.37 | 0.32 | 0.35 | 0.33 | 0.34 |
| 3 | 0.35 | 0.38 | 0.37 | 0.35 | 0.36 |
| 4 | 0.34 | 0.38 | 0.32 | 0.33 | 0.35 |
| 5 | 0.37 | 0.32 | 0.35 | 0.34 | 0.32 |
| 6 | 0.35 | 0.36 | 0.34 | 0.35 | 0.33 |
| 7 | 0.33 | 0.35 | 0.34 | 0.34 | 0.32 |
| 8 | 0.37 | 0.37 | 0.33 | 0.34 | 0.31 |
| 9 | 0.36 | 0.34 | 0.33 | 0.34 | 0.35 |
| 10 | 0.35 | 0.33 | 0.34 | 0.33 | 0.34 |
| 11 | 0.35 | 0.33 | 0.36 | 0.36 | 0.35 |
| 12 | 0.34 | 0.32 | 0.35 | 0.34 | 0.33 |
| 13 | 0.37 | 0.35 | 0.34 | 0.33 | 0.32 |
| 14 | 0.37 | 0.34 | 0.35 | 0.33 | 0.32 |
| 15 | 0.34 | 0.37 | 0.36 | 0.34 | 0.31 |
| 16 | 0.36 | 0.33 | 0.35 | 0.33 | 0.32 |
| 17 | 0.33 | 0.37 | 0.34 | 0.33 | 0.35 |
| 18 | 0.32 | 0.33 | 0.36 | 0.35 | 0.34 |
| 19 | 0.34 | 0.35 | 0.35 | 0.35 | 0.32 |
| 20 | 0.33 | 0.37 | 0.35 | 0.33 | 0.31 |
| 21 | 0.36 | 0.33 | 0.36 | 0.33 | 0.32 |
| 22 | 0.33 | 0.36 | 0.37 | 0.35 | 0.35 |
| 23 | 0.34 | 0.33 | 0.33 | 0.35 | 0.33 |
| 24 | 0.35 | 0.34 | 0.36 | 0.34 | 0.34 |
| 25 | 0.35 | 0.38 | 0.35 | 0.36 | 0.36 |
| 26 | 0.37 | 0.36 | 0.36 | 0.34 | 0.35 |
| 27 | 0.36 | 0.38 | 0.33 | 0.32 | 0.34 |
| 28 | 0.35 | 0.33 | 0.36 | 0.34 | 0.33 |
| 29 | 0.36 | 0.35 | 0.35 | 0.33 | 0.31 |
| 30 | 0.34 | 0.33 | 0.33 | 0.34 | 0.32 |
| 31 | 0.36 | 0.38 | 0.35 | 0.35 | 0.32 |
| 32 | 0.34 | 0.35 | 0.35 | 0.36 | 0.35 |
| X = | 0.3506 ± 0.0025 | 0.3496 ± 0.0035 | 0.3478 ± 0.0021 | 0.3406 ± 0.0018 | 0.3328 ± 0.0027 |
| Permutation Time Speed Rotational/Working | tper1 (s) | tper2 (s) | tper3 (s) | tper4 (s) | tper5 (s) |
|---|---|---|---|---|---|
| ω1 = 0.47 rev/s V1 =0.1 m/s | ω2 = 0.95 rev/s V2 =0.2 m/s | ω3 = 1.42 rev/s V3 =0.3 m/s | ω4 = 1.90 rev/s V4 = 0.4 m/s | ω5 = 2.38 rev/s V5 = 0.5 m/s | |
| 1 | 0.75 | 0.72 | 0.78 | 0.78 | 0.74 |
| 2 | 0.75 | 0.74 | 0.83 | 0.73 | 0.80 |
| 3 | 0.81 | 0.77 | 0.76 | 0.81 | 0.79 |
| 4 | 0.74 | 0.74 | 0.75 | 0.71 | 0.80 |
| 5 | 0.79 | 0.77 | 0.73 | 0.79 | 0.79 |
| 6 | 0.74 | 0.71 | 0.79 | 0.75 | 0.76 |
| 7 | 0.78 | 0.77 | 0.77 | 0.83 | 0.71 |
| 8 | 0.74 | 0.80 | 0.72 | 0.79 | 0.81 |
| 9 | 0.78 | 0.76 | 0.77 | 0.83 | 0.79 |
| 10 | 0.81 | 0.82 | 0.75 | 0.72 | 0.77 |
| 11 | 0.83 | 0.79 | 0.83 | 0.83 | 0.80 |
| 12 | 0.82 | 0.77 | 0.78 | 0.82 | 0.76 |
| 13 | 0.75 | 0.82 | 0.84 | 0.71 | 0.75 |
| 14 | 0.77 | 0.77 | 0.75 | 0.81 | 0.73 |
| 15 | 0.77 | 0.75 | 0.83 | 0.74 | 0.76 |
| 16 | 0.80 | 0.80 | 0.79 | 0.74 | 0.82 |
| 17 | 0.82 | 0.80 | 0.81 | 0.78 | 0.74 |
| 18 | 0.81 | 0.75 | 0.78 | 0.76 | 0.79 |
| 19 | 0.83 | 0.81 | 0.71 | 0.73 | 0.76 |
| 20 | 0.79 | 0.81 | 0.82 | 0.80 | 0.81 |
| 21 | 0.77 | 0.77 | 0.73 | 0.81 | 0.76 |
| 22 | 0.75 | 0.82 | 0.81 | 0.79 | 0.79 |
| 23 | 0.75 | 0.80 | 0.75 | 0.81 | 0.79 |
| 24 | 0.73 | 0.78 | 0.83 | 0.70 | 0.81 |
| 25 | 0.80 | 0.79 | 0.74 | 0.79 | 0.71 |
| 26 | 0.76 | 0.80 | 0.84 | 0.78 | 0.81 |
| 27 | 0.80 | 0.76 | 0.73 | 0.78 | 0.76 |
| 28 | 0.74 | 0.77 | 0.80 | 0.77 | 0.72 |
| 29 | 0.80 | 0.80 | 0.74 | 0.81 | 0.75 |
| 30 | 0.79 | 0.78 | 0.78 | 0.70 | 0.75 |
| 31 | 0.77 | 0.75 | 0.76 | 0.78 | 0.81 |
| 32 | 0.77 | 0.75 | 0.75 | 0.77 | 0.76 |
| X = | 0.7784 ± 0.0052 | 0.7762 ± 0.0050 | 0.7765 ± 0.0067 | 0.7734 ± 0.0070 | 0.7718 ± 0.0055 |
References
- Huang, B.K.; Ai, F. Air-pruned transplant production system for fully automated transplanting. Acta Hortic. 1992, 319, 523–528. [Google Scholar] [CrossRef]
- Gao, J.H.; Huang, B.K. Computer-Controlled Transplanting of Air-Pruned Seedlings/Plugs. SNA Res. Conf. 1993, 38, 229–234. [Google Scholar]
- Hallonborg, U. Wobbling in Pneumatic Systems for Transporting Seedlings. J. For. Eng. 1998, 9, 7–14. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, G.; Liu, H.; Liu, W.; Wei, J.; Tang, N. Design of and Experiment on Open-and-Close Seedling Pick-Up Manipulator with Four Fingers. Agriculture 2022, 12, 1776. [Google Scholar] [CrossRef]
- Jorg, O.J.; Sportelli, M.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Fantoni, G. Design, Development and Testing of Feeding Grippers for Vegetable Plug Transplanters. AgriEngineering 2021, 3, 669–680. [Google Scholar] [CrossRef]
- Tsuga, K. Development of fully automatic vegetable transplanter. Jarq-Jpn. Agric. Res. Q. 2000, 34, 21–28. [Google Scholar]
- Ye, B.L.; Li, L.; Yu, G.H.; Liu, A.; Cai, D. Design and test on cam mechanism of seedling pick-up arm for vegetable transplanter for pot seedling. Trans. CSAE 2014, 30, 21–29. [Google Scholar]
- Khadatkar, A.; Mathur, S.M.; Dubey, K.; BhusanaBabu, V. Development of embedded automatic transplanting system in seedling transplanters for precision agriculture. Artif. Intell. Agric. 2021, 5, 175–184. [Google Scholar] [CrossRef]
- Jin, X.; Yuan, Y.; Ji, J.; Zhao, K.; Li, M.; Chen, K. Design and implementation of anti-leakage planting system for transplanting machine based on fuzzy information. Comput. Electron. Agric. 2020, 169, 105204. [Google Scholar] [CrossRef]
- Yang, Q.; Huang, G.; Shi, X.; He, M.; Ahmad, I.; Zhao, X.; Addy, M. Design of a control system for a mini-automatic transplanting machine of plug seedling. Comput. Electron. Agric. 2020, 169, 105226. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.Y.; Ma, H.; Ji, J.T.; Zhao, K.X.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef]
- Han, L.; Mo, M.; Gao, Y.; Ma, H.; Xiang, D.; Ma, G.; Mao, H. Effects of New Compounds into Substrates on Seedling Qualities for Efficient Transplanting. Agronomy 2022, 12, 983. [Google Scholar] [CrossRef]
- Parladé, J.; Pera, J.; Álvarez, I.F.; Bouchard, D.; Généré, B.; Le Tacon, F. Effect of inoculation and substrate disinfection method on rooting and ectomycorrhiza formation of Douglas fir cuttings. Ann. For. Sci. 1999, 56, 35–40. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Islam, M.N.; Ali, M.; Kabir, M.S.N.; Park, T.; Kang, T.G.; Park, K.-S.; Chung, S.-O. Kinematic analysis of a hopper-type dibbling mechanism for a 2.6 kW two-row pepper transplanter. J. Mech. Sci. Technol. 2021, 35, 2605–2614. [Google Scholar] [CrossRef]
- Han, C.; Hu, X.; Zhang, J.; You, J.; Li, H. Design and testing of the mechanical picking function of a high-speed seedling auto-transplanter. Artif. Intell. Agric. 2021, 5, 64–71. [Google Scholar] [CrossRef]
- Jin, X.; Li, M.; Li, D.; Ji, J.; Pang, J.; Wang, J.; Peng, L. Development of automatic conveying system for vegetable seedlings. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 178. [Google Scholar] [CrossRef]
- Zeng, F.; Cui, J.; Li, X.; Bai, H. Establishment of the Interaction Simulation Model between Plug Seedlings and Soil. Agronomy 2024, 14, 4. [Google Scholar] [CrossRef]
- Ferrari Growtech. Available online: https://ferrarigrowtech.com/en/tray-transplanters/8-futura-automated-transplanter.html. (accessed on 10 February 2024).
- Williames Pty Ltd. Available online: http://www.williames.com/nursery-machinery/williames-trays-flats/ (accessed on 10 February 2024).
- Wen, Y.; Zhang, J.; Tian, J.; Duan, D.; Zhang, Y.; Tan, Y.; Yuan, T.; Li, X. Design of a traction double-row fully automatic transplanter for vegetable plug seedlings. Comput. Electron. Agric. 2021, 182, 106017. [Google Scholar] [CrossRef]
- Han, L.; Mao, H.; Hu, J.; Kumi, F. Development of a Riding-Type Fully Automatic Transplanter for Vegetable Plug Seedlings. Span. J. Agric. Res. 2019, 17, e0205. [Google Scholar] [CrossRef]
- Sun, H.; Slaughter, D.C.; Ruiz, M.P.; Gliever, C.; Upadhyaya, S.K.; Smith, R.F. RTK GPS mapping of transplanted row crops. Comput. Electron. Agric. 2010, 71, 32–37. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Slaughter, D.C. Development of a precision 3-row synchronised transplanter. Biosyst. Eng. 2021, 206, 67–78. [Google Scholar] [CrossRef]
- Reza, M.N.; Ali, M.; Habineza, E.; Kabir, M.S.; Kabir, M.S.N.; Lim, S.-J.; Choi, I.-S.; Chung, S.-O. Analysis of operating speed and power consumption of a gear-driven rotary planting mechanism for a 12-kW six-row self-propelled onion transplanter. Span. J. Agric. Res. 2023, 21, e0207. [Google Scholar] [CrossRef]
- Manilla, R.D.; Shaw, L.N. A high-speed dibbling transplanter. Trans. ASAE 1987, 30, 904–908. [Google Scholar] [CrossRef]
- Vlahidis, V. Contributions to Improving the Seedling Planting Process. Ph.D. Thesis, “Gh.Asachi” Technical University Iași, Faculty of Mechanics, Specialisation Mechanical Engineering, Iași, Romania, 2014. [Google Scholar]
- He, T.; Li, H.; Shi, S.; Liu, X.; Liu, H.; Shi, Y.; Jiao, W.; Zhou, J. Preliminary Results Detailing the Effect of the Cultivation System of Mulched Ridge with Double Row on Solanaceous Vegetables Obtained by Using the 2ZBX-2A Vegetable Transplanter. Appl. Sci. 2023, 13, 1092. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Wang, J.; Wu, C.; Yu, G.; Tang, Y. Experiment on transplanting performance of automatic vegetable pot seedling transplanter for dry land. Trans. Chin. Soc. Agric. Eng. 2018, 34, 19–25. [Google Scholar] [CrossRef]
- Xnote Stopwatch V 1.63. Available online: http://www.xnotestopwatch.com/download.html (accessed on 11 December 2023).
- Țenu, I.; Roșca, R.; Cârlescu, P.; Vlahidis, V. Laboratory Stand for Impact Study Agricultural Traffic and Technological Works on Soil Physical Properties; Iasi Polytechnic Institute Bulletin, Machine Constructions Section: Iași, Romania, 2012; Volume LVIII (LXII), pp. 255–262. [Google Scholar]
- Stubbs, S.; Colton, J. The Design of a Mechanized Onion Transplanter for Bangladesh with Functional Testing. Agriculture 2022, 12, 1790. [Google Scholar] [CrossRef]
- Khadatkar, A.; Mathur, S.M.; Dubey, K.; Magar, A.P. Automatic Ejection of Plug-type Seedlings using Embedded System for use in Automatic Vegetable Transplanter. J. Sci. Ind. Res. 2021, 80, 1042–1048. [Google Scholar] [CrossRef]
- Prasanna Kumar, G.V.; Raheman, H. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings. Biosyst. Eng. 2011, 110, 189–197. [Google Scholar] [CrossRef]
- Brewer, H.L. Experimental Automatic Feeder for Seedling Transplanter. Appl. Eng. Agric. 1988, 4, 24–29. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, S.; Li, N.; Faheem, M.; Zhou, T.; Cai, W.; Zhao, M.; Zhu, X.; Li, P. Development and field test of an autonomous strawberry plug seeding transplanter for use in elevated cultivation. Appl. Eng. Agric. 2019, 35, 1067–1078. [Google Scholar] [CrossRef]
- Yang, L.; He, X.T.; Cui, T.; Zhang, D.X.; Shi, S.; Zhang, R.; Wang, M. Development of mechatronic driving system for seed meters equipped on conventional precision corn planter. Int. J. Agric. Biol. Eng. 2015, 8, 1–9. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Islam, M.N.; Chowdhury, M.; Islam, S.; Park, T.; Kim, Y.-J.; Chung, S.-O. Working Speed Analysis of the Gear-Driven Dibbling Mechanism of a 2.6 kW Walking-Type Automatic Pepper Transplanter. Machines 2021, 9, 6. [Google Scholar] [CrossRef]
- Garibaldi-Márquez, F.; Martínez-Reyes, E.; García-Hernández, R.V.; Galindo-Reyes, M.A. Planter to distribute seeds in four-row beds and harvest rainwater. Ing. Agrícola Y Biosist. 2020, 12, 21–40. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, L.; Huang, X.; Yuan, T.; Zhang, J.; Tan, Y.; Feng, Z. Design of and Experiment with Seedling Selection System for Automatic Transplanter for Vegetable Plug Seedlings. Agronomy 2021, 11, 2031. [Google Scholar] [CrossRef]
- Jiffy Pellets Products. Available online: https://jiffygroup.com/products/jiffy-pellets/#jiffypellets (accessed on 3 January 2024).














| Agronomic Planting Indicator | Relative Deviation Ad (%) | Misplanted Rate Ms (%) | Planter Wheel Slippage α (%) | Planting Frequency Fs (s−1) |
|---|---|---|---|---|
| Value | 5–10 1 | 6–10 2 | 10–15 3 | 0.83–5 4 |
| Return Time Speed Rotational/Working | trev1 (s) | trev2 (s) | trev3 (s) | trev4 (s) | trev5 (s) |
|---|---|---|---|---|---|
| ω1 = 0.47 rev/s V1 =0.1 m/s | ω2 = 0.95 rev/s V2 = 0.2 m/s | ω3 = 1.42 rev/s V3 = 0.3 m/s | ω4 = 1.90 rev/s V4 = 0.4 m/s | ω5 = 2.38 rev/s V5 = 0.5 m/s | |
| X = | 0.3506 ± 0.0025 | 0.3496 ± 0.0035 | 0.3478 ± 0.0021 | 0.3406 ± 0.0018 | 0.3328 ± 0.0027 |
| Permutation Time Speed Rotational/Working | tper1 (s) | tper2 (s) | tper3 (s) | tper4 (s) | tper5 (s) |
|---|---|---|---|---|---|
| ω1 = 0.47 rev/s V1 = 0.1 m/s | ω2 = 0.95 rev/s V2 = 0.2 m/s | ω3 = 1.42 rev/s V3 = 0.3 m/s | ω4 = 1.90 rev/s V4 = 0.4 m/s | ω5 = 2.38 rev/s V5 = 0.5 m/s | |
| X | 0.7784 ± 0.0052 | 0.7762 ± 0.0050 | 0.7765 ± 0.0067 | 0.7734 ± 0.0070 | 0.7718 ± 0.0055 |
| Seedling Height [mm] | Stem Height [mm] | Substrate Height [mm] | Substrate Diameter [mm] | Weight [g] | Foliage Diameter [mm] | Leaves Number [pcs.] |
|---|---|---|---|---|---|---|
| 157 ± 0.1045 | 79 ± 0.1254 | 40.28± 0.1411 | 41.11 ± 0.2374 | 58 ± 0.3236 | 45 ± 1.175 | 2–4 |
| No. | tcd (s) | No. | tcd (s) | No. | tcd (s) | No. | tcd (s) |
|---|---|---|---|---|---|---|---|
| 1 | 0.27 | 9 | 0.22 | 17 | 0.29 | 25 | 0.26 |
| 2 | 0.22 | 10 | 0.29 | 18 | 0.29 | 26 | 0.21 |
| 3 | 0.25 | 11 | 0.25 | 19 | 0.28 | 27 | 0.25 |
| 4 | 0.22 | 12 | 0.27 | 20 | 0.31 | 28 | 0.28 |
| 5 | 0.22 | 13 | 0.28 | 21 | 0.29 | 29 | 0.28 |
| 6 | 0.29 | 14 | 0.27 | 22 | 0.22 | 30 | 0.29 |
| 7 | 0.29 | 15 | 0.24 | 23 | 0.25 | 31 | 0.24 |
| 8 | 0.24 | 16 | 0.22 | 24 | 0.28 | 32 | 0.23 |
| 0.2590 ± 0.045 | |||||||
| Parameters/Runs | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Frequency (Hz) | 10 | 14.6 | 19.9 | 21.7 | 28.3 | 31.5 | 35.4 | 40.3 | 48.2 |
| Electrical resistance (KΩ) | 1.0 | 3.0 | 4.5 | 5.0 | 6.5 | 7.0 | 7.5 | 8.0 | 8.5 |
| Speed Vm (m/s) | 0.102 | 0.150 | 0.208 | 0.227 | 0.285 | 0.304 | 0.353 | 0.412 | 0.528 |
| No. | Working Speed Vm (m/s) | Seedlings Distance Per Row dp (m) | Relative Deviation Ad (%) | Misplanted Rate Ms (%) | Wheel Slip α (%) | Planting Frequency Fs (s−1) | |||
|---|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | St Dev | ||||||
| 1 | V1 = 0.102 | 0.308 | 0.396 | 0.333 | 0.0151 | 4.534 | 10 | 3.60 | 0.306 |
| 2 | V2 = 0.208 | 0.323 | 0.352 | 0.335 | 0.0080 | 2.388 | 0 | 4.179 | 0.620 |
| 3 | V3 = 0.304 | 0.324 | 0.356 | 0.338 | 0.0086 | 2.544 | 3.33 | 5.029 | 0.899 |
| 4 | V4 = 0.412 | 0.331 | 0.382 | 0.356 | 0.0141 | 3.960 | 3.33 | 9.831 | 1.157 |
| 5 | V5 = 0.528 | 0.333 | 0.394 | 0.370 | 0.0160 | 4.324 | 13.33 | 13.24 | 1.427 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vlahidis, V.; Roșca, R.; Cârlescu, P.-M. Evaluation of the Functional Parameters for a Single-Row Seedling Transplanter Prototype. Agriculture 2024, 14, 388. https://doi.org/10.3390/agriculture14030388
Vlahidis V, Roșca R, Cârlescu P-M. Evaluation of the Functional Parameters for a Single-Row Seedling Transplanter Prototype. Agriculture. 2024; 14(3):388. https://doi.org/10.3390/agriculture14030388
Chicago/Turabian StyleVlahidis, Virgil, Radu Roșca, and Petru-Marian Cârlescu. 2024. "Evaluation of the Functional Parameters for a Single-Row Seedling Transplanter Prototype" Agriculture 14, no. 3: 388. https://doi.org/10.3390/agriculture14030388
APA StyleVlahidis, V., Roșca, R., & Cârlescu, P.-M. (2024). Evaluation of the Functional Parameters for a Single-Row Seedling Transplanter Prototype. Agriculture, 14(3), 388. https://doi.org/10.3390/agriculture14030388