
Design and Experiment of a High-Clearance Mid-Tillage Weeder for Dryland Farming

Abstract
:1. Introduction
2. Materials and Methods
2.1. Overall Structural Design
2.1.1. Agronomic Requirements for HMTW
- The unit must have a high ground clearance.
- Have a good stability in tillage depth.
- Meet the requirements of weeding technology: weeding rate ≥ 85%, seedling damage rate ≤ 5%, and seedling burial rate ≤ 5%.
- Adjustable line spacing for operation.
- Loose soil and a flat surface after cultivation.
2.1.2. Overall Structure and Working Principle
2.1.3. Main Technical Parameters
2.2. Key Component Design
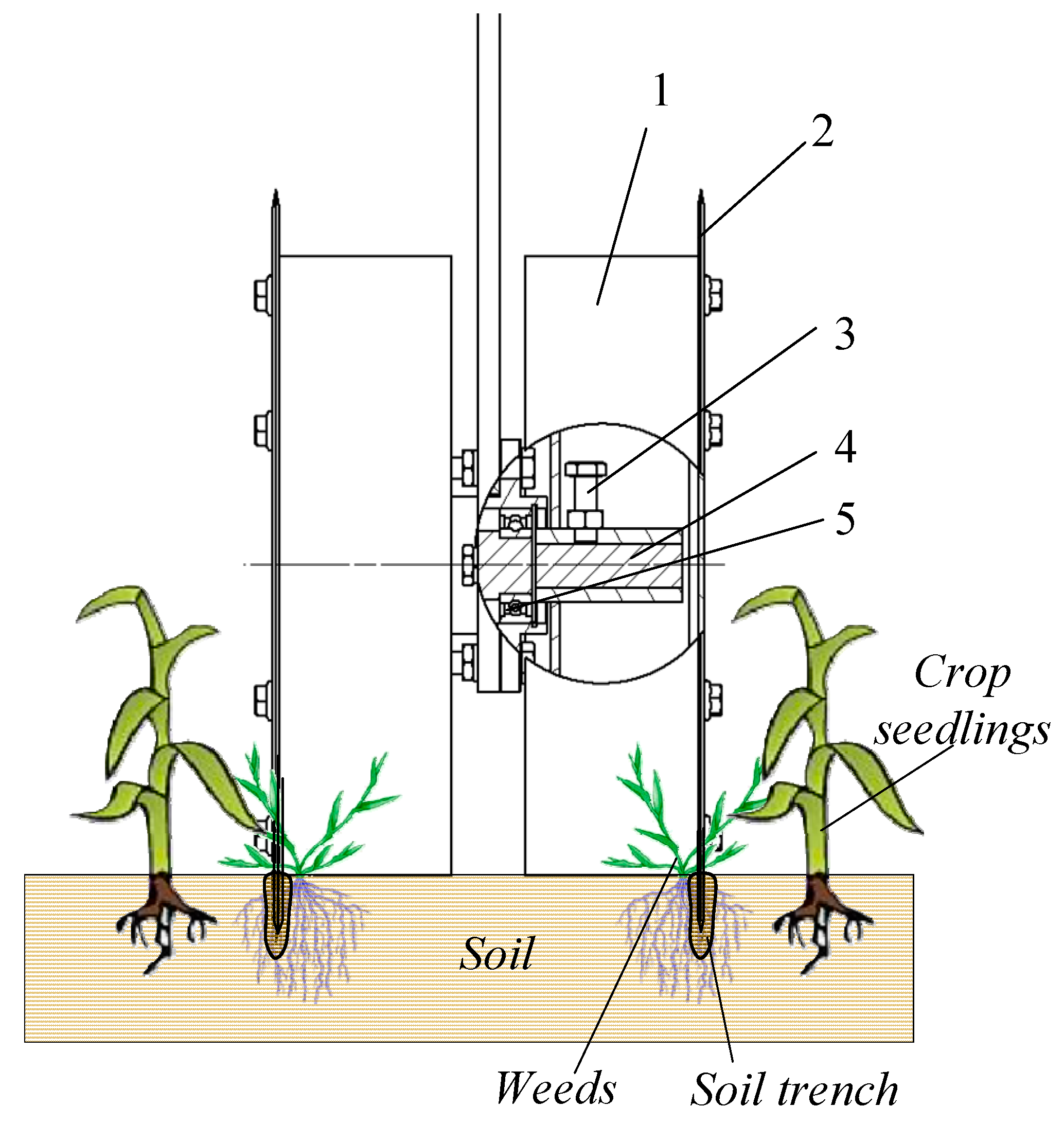
2.2.1. Design of Flat Shovel Weeding Components
- Flat shovel hoe

- Configuration of the weeding shovel
2.2.2. Design of Individual Weeding Units
- Overall structure of individual weeding units
- Structural design of depth-limiting soil-cutting device
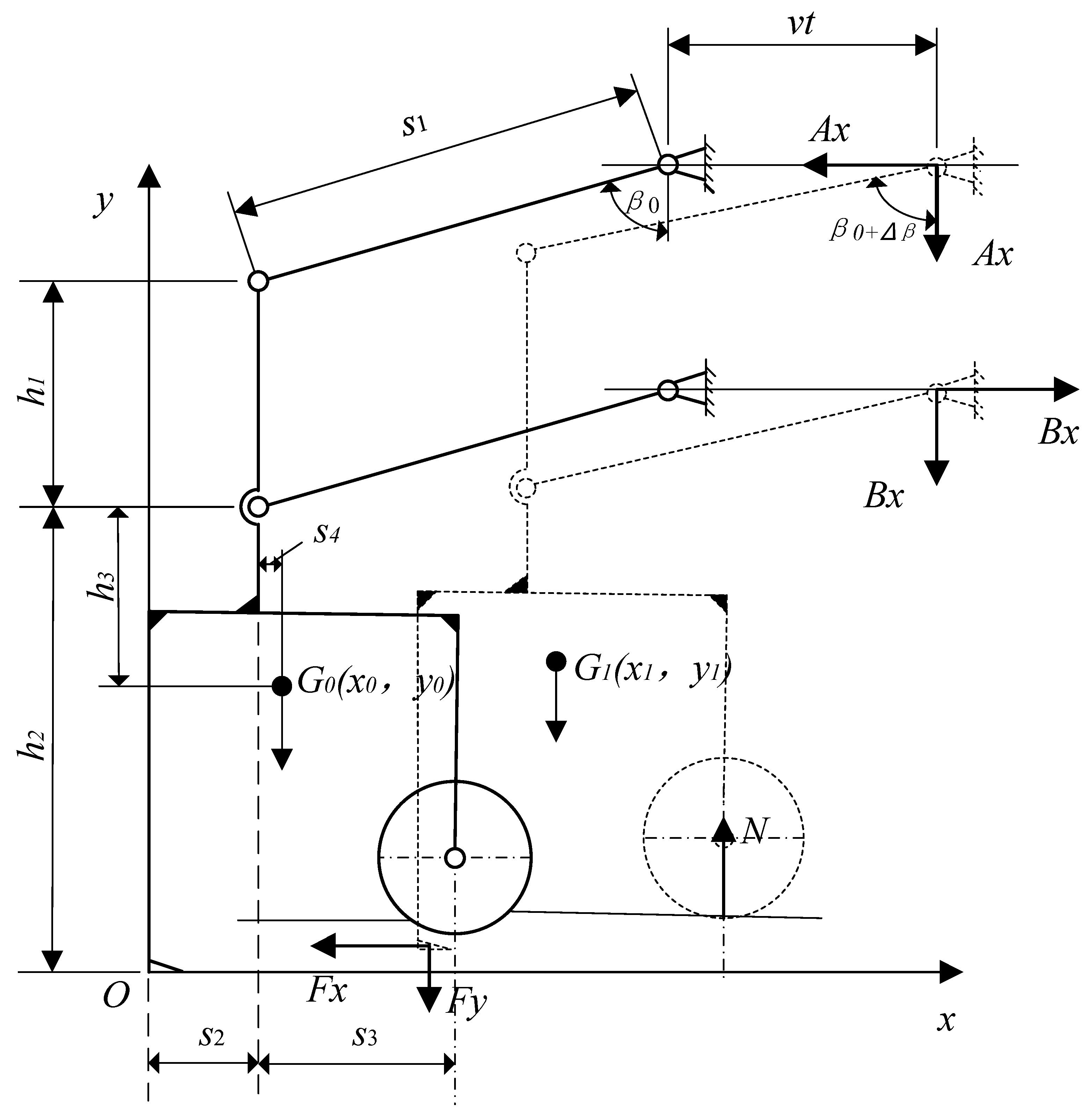
2.3. Optimization Design of Four-Rod Profiling Mechanism
2.3.1. Theoretical Analysis of the Stability of Tillage Depth for Individual Weeding Units
2.3.2. Optimization Design of Parallel Four-Rod Mechanism
- Objective function
- 2.
- Input parameter
- 3.
- Design variable
- 4.
- Constraint condition
- 5.
- Optimal Results
2.4. Field Performance Test
2.4.1. Prototype Trial Production
2.4.2. Test Site Conditions
2.4.3. Test Methods
- Determination of measurement area
- Determination of weeding rate
- Determination of seedling injury rate and burial rate
- Inspection of the qualified rate of tillage depth and the rate of broken soil in the plow layer
2.4.4. Experimental Design
3. Results and Discussion
3.1. Field Performance Test Results and Analysis
- (1)
- The HMTW has a good weeding effect and operational stability within the designed operating range. At different operating speeds, the actual plowing depth remains stable at the set value, and the qualified rate of the plowing depth is higher than the relevant standard requirements (≥85%). The optimized weeding mechanism has a good effect on stabilizing the plowing depth.
- (2)
- Improving the driving speed has little impact on the weed control rate. This is because the experimental soil is sandy and relatively loose after rain. The flat shovel hoe has a better cutting effect. Although weeds with shallower roots are more easily removed when the operating speed increases, the leakage caused by deviation from the centerline also increases.
- (3)
- As the speed of driving increases, the rate of damaged seedlings and buried seedlings also increases. The increase in the seedling injury rate is because, as the unit’s operating speed increases, it becomes more difficult for the operator to drive along the line, causing the equipment to deviate from the centerline between the rows. The increase in the seedling burial rate is mainly due to the large wheat residue in the previous crop, which forms aggregates within the soil. After the operation speed is increased, the amount of soil displacement is large, which can easily lead to congestion of the working parts.
3.2. Stability Performance Analysis of Tillage Depth
3.3. Discussion
4. Conclusions
- (1)
- A HMTW was designed with a ground clearance of 900 mm to realize high-stalk crop weed control in dryland farming. The HMTW is equipped with four independent weeding units: a parallel four-rod profiling mechanism, two flat shovel hoes, and a depth-limiting soil-cutting device. The working row space and weeding width can be freely adjusted.
- (2)
- Theoretical analysis was conducted on the depth stability of the HMTW. An optimization mathematical model was established with the objective function of minimizing the deviation angle of the profiling rod in the vertical plane, and the structural parameters of the weeding unit were the design variables. Based on the actual working conditions of tillage and weeding in dryland farming, the structural parameters of the HMTW were optimized and designed.
- (3)
- The field test results of the prototype showed that the optimized HMTW exhibited a good weeding effect and operational stability within the design operating range. The driving speed showed a relatively small impact on the weeding rate but a significant impact on the seedling injury rate and burial rate. When the driving speed was 1.0 m/s and the tillage depth was 8 cm, the weeding rate between the rows of the buckwheat was 90.8%, the seedling injury rate was 3.2%, the seedling burial rate was 4.1%, and the qualified rate of the tillage depth was 94%. All indicators met the relevant standards. The designed HMTW prototype successfully meets the requirements of weeding in high-stalk crops of dryland farming.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Dhakal, M.; Zinati, G.; Fulcher, M.; Fornara, D.; Martani, E.; Contina, J.B.; Hinson, P.; Afshar, R.; Ghimire, R. Challenges and emerging opportunities for weed management in organic agriculture. In Advances in Agronomy; Academic Press: Cambridge, MA, USA, 2024. [Google Scholar]
- Ranji, A.; Parashkoohi, M.G.; Zamani, D.M.; Ghahderijani, M. Evaluation of agronomic, technical, economic, and environmental issues by analytic hierarchy process for rice weeding machine. Energy Rep. 2022, 8, 774–783. [Google Scholar] [CrossRef]
- Pannacci, E.; Tei, F. Effects of mechanical and chemical methods on weed control, weed seed rain and crop yield in maize, sunflower and soyabean. Crop Prot. 2014, 64, 51–59. [Google Scholar] [CrossRef]
- Pratap, V.; Verma, S.K.; Dass, A. Weed growth, nutrient removal and yield of direct-seeded rice as influenced by establishment methods and chemical-cum-mechanical weed management practices. Crop Prot. 2023, 163, 106100. [Google Scholar] [CrossRef]
- Zhao, Z.; Han, L.; Li, M.; Sheng, Y.; Xie, M.; Wu, Q.; Zhang, Y. Weed control performance of different sowing modes in organic wheat production. Crop Prot. 2024, 175, 106473. [Google Scholar] [CrossRef]
- Travlou, E.; Antonopoulos, N.; Gazoulis, I.; Kanatas, P. Chemical Weed Control and Crop Injuries Due to Spray Drift: The Case of Dicamba. Agrochemicals 2024, 3, 22–28. [Google Scholar] [CrossRef]
- Matzrafi, M.; Peleg, Z.; Lati, R. Herbicide Resistance in Weed Management. Agronomy 2021, 11, 280. [Google Scholar] [CrossRef]
- Saleh, R.; El Benni, N.; Masson, S.; Ammann, J. Public acceptance and sustainability perceptions of food produced with chemical, digital and mechanical weed control measures. Food Qual. Prefer. 2024, 113, 105079. [Google Scholar] [CrossRef]
- Fishkis, O.; Koch, H.-J. Effect of mechanical weeding on soil erosion and earthworm abundance in sugar beet (Beta vulgaris L.). Soil Tillage Res. 2023, 225, 105548. [Google Scholar] [CrossRef]
- Adhikari, S.; Menalled, F.D. Impacts of Dryland Farm Management Systems on Weeds and Ground Beetles (Carabidae) in the Northern Great Plains. Sustainability 2018, 10, 2146. [Google Scholar] [CrossRef]
- Akhter, M.J.; Sønderskov, M.; Loddo, D.; Ulber, L.; Hull, R.; Kudsk, P. Opportunities and challenges for harvest weed seed control in European cropping systems. Eur. J. Agron. 2023, 142, 126639. [Google Scholar] [CrossRef]
- Sowiński, J. Effect of mechanical tillage treatments intensity on weed infestation and yield of quinoa (Chenopodium quinoa Willd.). Crop Prot. 2023, 172, 106341. [Google Scholar] [CrossRef]
- Liu, C.; Yang, K.; Chen, Y.; Gong, H.; Feng, X.; Tang, Z.; Fu, D.; Qi, L. Benefits of mechanical weeding for weed control, rice growth characteristics and yield in paddy fields. Field Crops Res. 2023, 293, 108852. [Google Scholar] [CrossRef]
- Fishkis, O.; Weller, J.; Lehmhus, J.; Pöllinger, F.; Strassemeyer, J.; Koch, H.-J. Ecological and economic evaluation of conventional and new weed control techniques in row crops. Agric. Ecosyst. Environ. 2024, 360, 108786. [Google Scholar] [CrossRef]
- Richard, D.; Leimbrock-Rosch, L.; Keßler, S.; Stoll, E.; Zimmer, S. Soybean yield response to different mechanical weed control methods in organic agriculture in Luxembourg. Eur. J. Agron. 2023, 147, 126842. [Google Scholar] [CrossRef]
- Vasileiou, M.; Kyrgiakos, L.S.; Kleisiari, C.; Kleftodimos, G.; Vlontzos, G.; Belhouchette, H.; Pardalos, P.M. Transforming weed management in sustainable agriculture with artificial intelligence: A systematic literature review towards weed identification and deep learning. Crop Prot. 2024, 176, 106522. [Google Scholar] [CrossRef]
- Zawada, M.; Legutko, S.; Gościańska-Łowińska, J.; Szymczyk, S.; Nijak, M.; Wojciechowski, J.; Zwierzyński, M. Mechanical Weed Control Systems: Methods and Effectiveness. Sustainability 2023, 15, 15206. [Google Scholar] [CrossRef]
- Han, B.; Shen, J.; Li, Y. Design and experiment on 3ZCF-7700 multi-functional weeding-cultivating machine. Trans. Chin. Soc. Agric. Eng. 2011, 27, 124–129. [Google Scholar] [CrossRef]
- Wang, X.; Fu, Z.; Zhang, Q.; Huang, Y. Short-term subsoiling effects with different wing mounting heights before winter wheat on soil properties and wheat growth in Northwest China. Soil Tillage Res. 2021, 213, 105151. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling (DEM) of tillage: Accounting for soil cohesion and adhesion. Biosyst. Eng. 2015, 129, 298–306. [Google Scholar] [CrossRef]
- Liu, K.; Sozzi, M.; Gasparini, F.; Marinello, F.; Sartori, L. Combining simulations and field experiments: Effects of subsoiling angle and tillage depth on soil structure and energy requirements. Comput. Electron. Agric. 2023, 214, 108323. [Google Scholar] [CrossRef]
- Wang, A.Z.; Ji, X.; Zhu, Y.Y.; Wang, Q.Z.; Wei, X.H.; Zhang, S.C. Tillage depth regulation system via depth measurement feedback and composite sliding mode control: A field comparison validation study. Meas. Control 2023. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, B.; Sun, M.J.; Sun, X.B.; Zhou, W.Q.; Tang, H.; Wang, J.W. Design and Testing of an Automatic Strip-Till Machine for Conservation Tillage of Corn. Agronomy 2023, 13, 2357. [Google Scholar] [CrossRef]
- Higginbotham, R.W.; Jones, S.S.; Carter, A.H. Wheat Cultivar Performance and Stability between No-Till and Conventional Tillage Systems in the Pacific Northwest of the United States. Sustainability 2013, 5, 882–895. [Google Scholar] [CrossRef]
- Sun, S.; Wu, M.; Xie, F.; Jiang, P.; Li, J. Stability analysis of plowing operation of paddy field tillage machine. Trans. Chin. Soc. Agric. Mach. 2007, 38, 217–219+234. Available online: https://qikan.cqvip.com/Qikan/Article/Detail?id=26417291 (accessed on 30 December 2007).
- Qin, K.; Ding, W.; Fang, Z.; Du, T.; Zhao, S.; Wang, Z. Analysis and experiment of tillage depth and width stability for plowing and rotary tillage combined machine. Trans. Chin. Soc. Agric. Eng. 2016, 32, 9. [Google Scholar] [CrossRef]
- Suomi, P.; Oksanen, T. Automatic working depth control for seed drill using ISO 11783 remote control messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
- Xia, J.; Li, D.; Liu, G.; Cheng, J.; Zheng, K.; Luo, C. Design and test of electro-hydraulic monitoring device for hitch tillage depth based on measurement of tractor pitch angle. Trans. Chin. Soc. Agric. Mach. 2021, 52, 386–395. [Google Scholar] [CrossRef]
- Machleb, J.; Peteinatos, G.G.; Kollenda, B.L.; Andújar, D.; Gerhards, R. Sensor-based mechanical weed control: Present state and prospects. Comput. Electron. Agric. 2020, 176, 105638. [Google Scholar] [CrossRef]
- Shao, B.; Ling, L.; Xia, D. Weed Control Measures in Organic Agriculture Production. Mod. Agric. Sci. Technol. 2019, 17, 133–134+137. [Google Scholar]
- First, M. Agricultural Machinery Design Manual; China Agricultural Science and Technology Press: Beijing, China, 2007; pp. 585–606. ISBN 978-78-0233-335-2. [Google Scholar]
- Zhang, G.; Wang, X.; Li, H.; Feng, A. Analyze and Design on Shovel of No-till Weeding Machine. J. Agric. Mech. Res. 2007, 11, 90–93. [Google Scholar] [CrossRef]
- Cordill, C.; Grift, T.E. Design and testing of an intra-row mechanical weeding machine for corn. Biosyst. Eng. 2011, 110, 247–252. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First Weeding | Second Weeding | Third Weeding | ||||
|---|---|---|---|---|---|---|
| Crop | Plant Height/cm | Depth of Weeding/cm | Plant Height/cm | Depth of Weeding/cm | Plant Height/cm | Depth of Weeding/cm |
| Corn | 15–25 | 3 | 50–60 | 4–6 | 70–100 | 6–10 |
| Sorghum | 15–25 | 3 | 50–60 | 4–6 | 70–100 | 6–10 |
| Buckwheat | 10–15 | 3 | 25–35 | 3–5 | 45–60 | 5–8 |
| Project | Unit | Parameters |
|---|---|---|
| Supporting Power | kW | 36.8 |
| Ground clearance | mm | 900 |
| Overall dimension (Length × Wide × High) | mm | 1475 × 1967 × 1480 |
| Number of operation rows | row | 4 |
| Driving type | - | hydraulic motor |
| Profiling mechanism | - | parallel four-rod mechanism |
| Adjustment method for tillage depth | - | height of depth-limiting wheel |
| Depth adjustment range | mm | 30–120 |
| Row spacing of crops | mm | 300–600 |
| Parameter | Sliding Cut Angle (γ) | Cutting Soil Angle (δ) | Shovel Width (w) | Thickness of the Shovel Blade (t) | Thickness of the Shovel Support (s) |
|---|---|---|---|---|---|
| value | 35°–40° | 20° | 50 mm | 2 mm | 8 mm |
| Project | Row Space/(cm) | Depth of Weeding/(cm) | Operation Width/(cm) | Profile Height/(cm) |
|---|---|---|---|---|
| range | 400–600 | 0–15 | 25–45 | 0–20 |
| Parameters | Fx/(N) | Fy/(N) | m/(kg) | N/(N) | Ax/(N) |
|---|---|---|---|---|---|
| Value | 468 | 168.5 | 40 | 473 | 936 |
| Parameter | l1/mm | l2/mm | s1/mm | s2/mm | s3/mm | s4/mm | β0/(°) |
|---|---|---|---|---|---|---|---|
| Value | 250 | 625 | 408 | 90 | 75 | 21 | 83 |
| Working Conditions | Weeding Effect | Operation Stability | |||||
|---|---|---|---|---|---|---|---|
| Tillage Depth /cm | Driving Speed/(m/s) | Weeding Rate/% | Injury Rate of Seedlings/% | Seedling Bury Percentage/% | Average Tillage Depth/cm | Qualified Rate of Tillage Depth/% | Soil Fragmentation Rate/% |
| 5 | 0.54 | 87.5 | 2.0 | 0.7 | 4.61 | 86 | 92.2 |
| 1.0 | 87.8 | 4.5 | 3.1 | 4.87 | 89 | 95.1 | |
| 1.4 | 88.5 | 6.5 | 8 | 5.14 | 91 | 97.4 | |
| 1.8 | 86.45 | 7.65 | 15.48 | 5.35 | 91 | 94.8 | |
| 8 | 0.54 | 90.4 | 1.2 | 2.3 | 7.78 | 91 | 85.3 |
| 1.0 | 90.8 | 3.2 | 4.1 | 8.10 | 94 | 86.4 | |
| 1.4 | 92.1 | 7.1 | 9.9 | 8.16 | 93 | 87.3 | |
| 1.8 | 91.5 | 7.6 | 12.8 | 8.64 | 90 | 86.7 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, S.; Zhang, X.; Wang, Q.; Li, X.; Hu, F.; Song, H.; Zheng, D. Design and Experiment of a High-Clearance Mid-Tillage Weeder for Dryland Farming. Agriculture 2024, 14, 435. https://doi.org/10.3390/agriculture14030435
Ye S, Zhang X, Wang Q, Li X, Hu F, Song H, Zheng D. Design and Experiment of a High-Clearance Mid-Tillage Weeder for Dryland Farming. Agriculture. 2024; 14(3):435. https://doi.org/10.3390/agriculture14030435
Chicago/Turabian StyleYe, Shaobo, Xinchi Zhang, Qi Wang, Xin Li, Fenshan Hu, Haiyan Song, and Decong Zheng. 2024. "Design and Experiment of a High-Clearance Mid-Tillage Weeder for Dryland Farming" Agriculture 14, no. 3: 435. https://doi.org/10.3390/agriculture14030435