


Multi-Scenario Variable-State Robust Fusion Algorithm for Ranging Analysis Framework


Abstract
1. Introduction
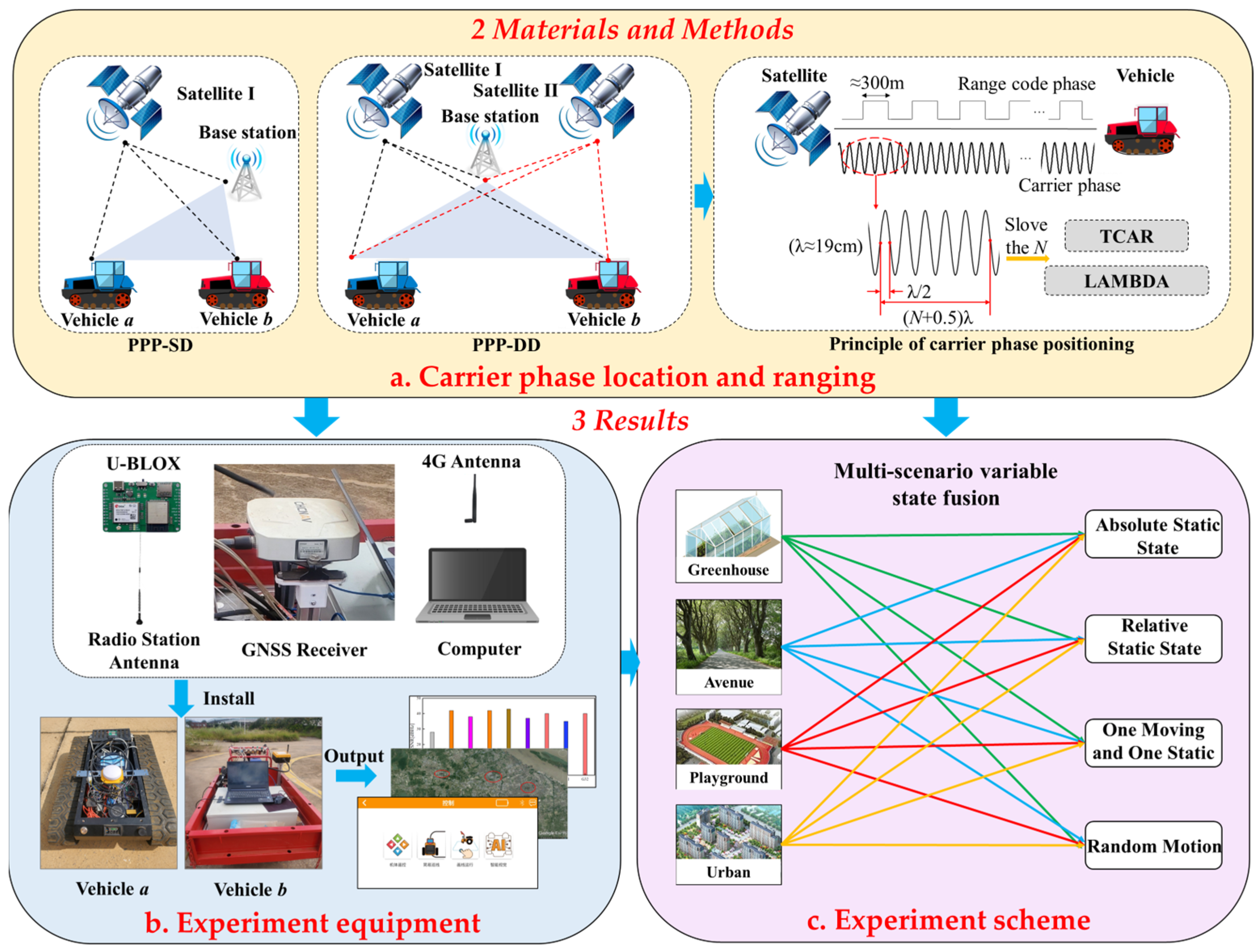
2. Materials and Methods
2.1. Ranging Model
2.2. Carrier Phase Location and Ranging
2.2.1. PPP-SD
2.2.2. PPP-DD
2.2.3. PPP-TCAR
2.2.4. PPP-LAMBDA
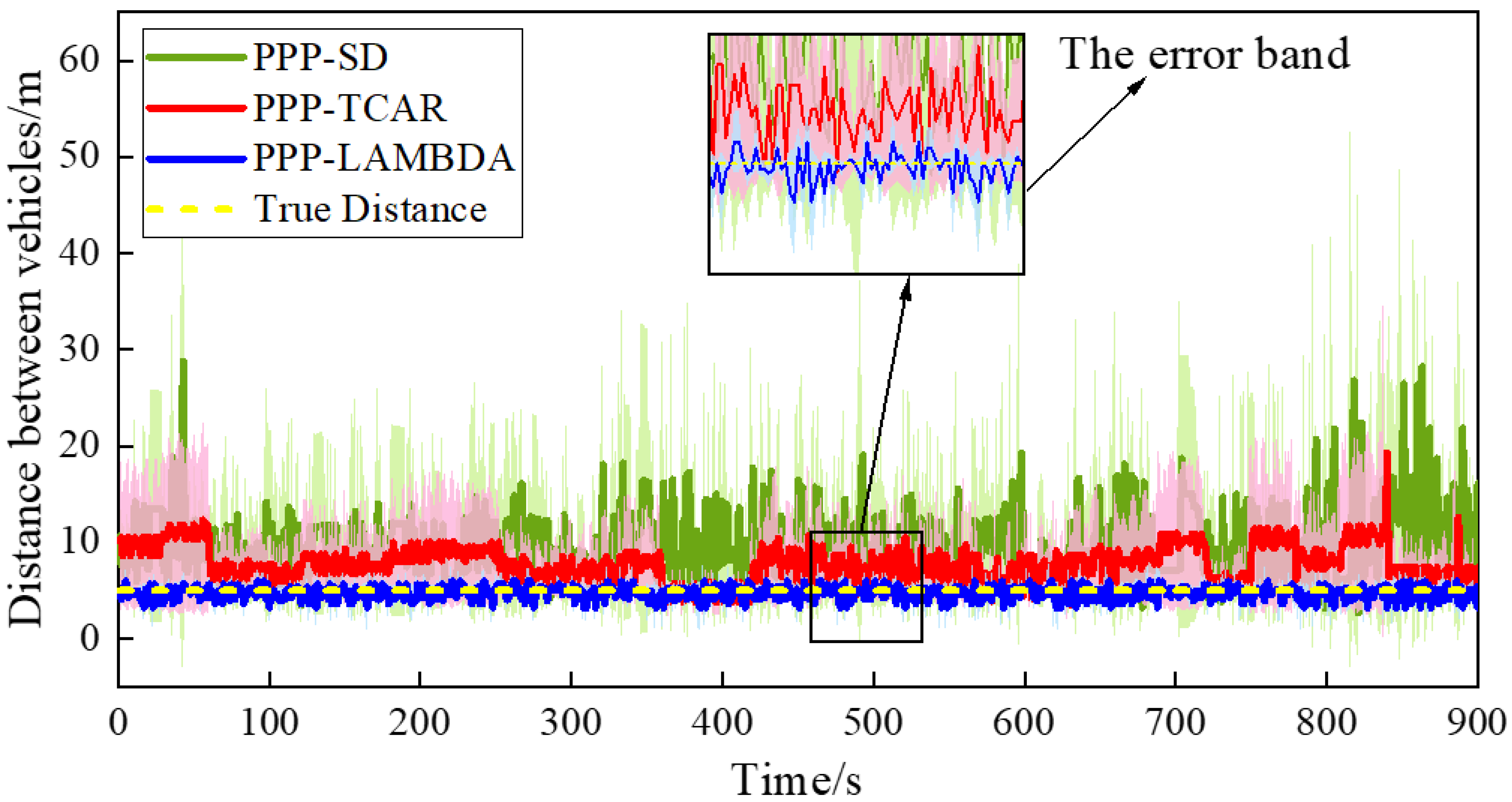
3. Results
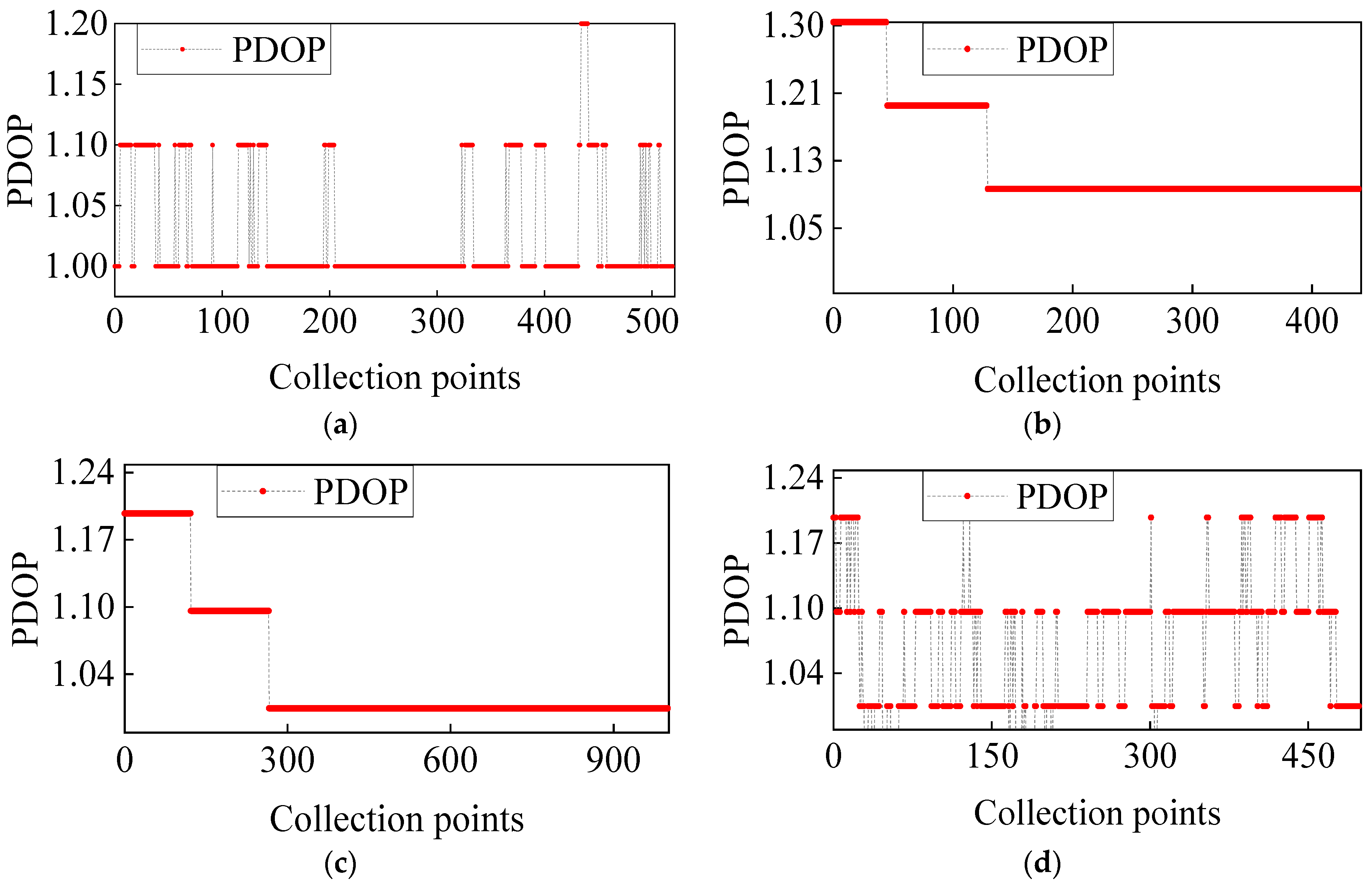
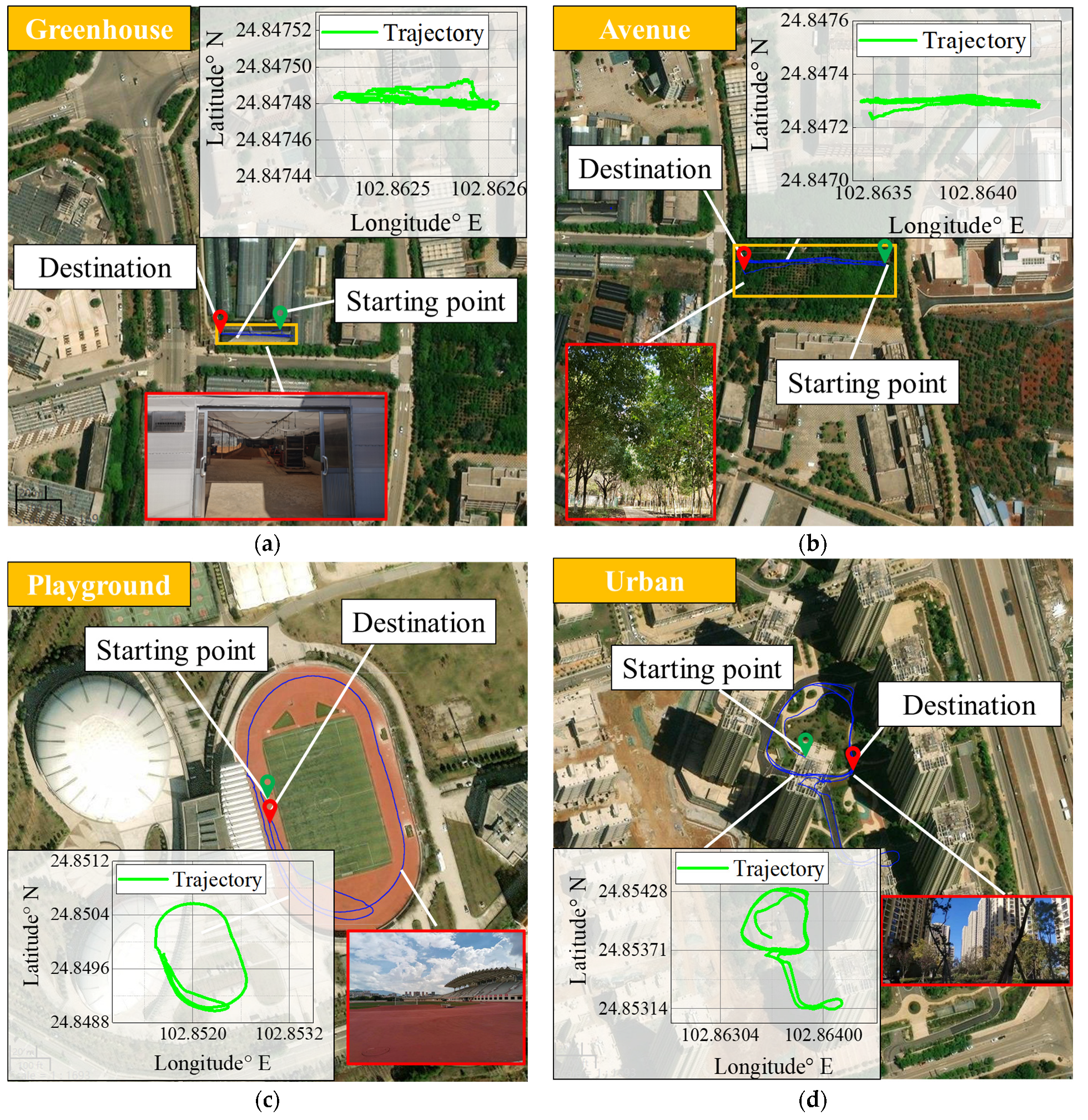
3.1. Experimental Setup
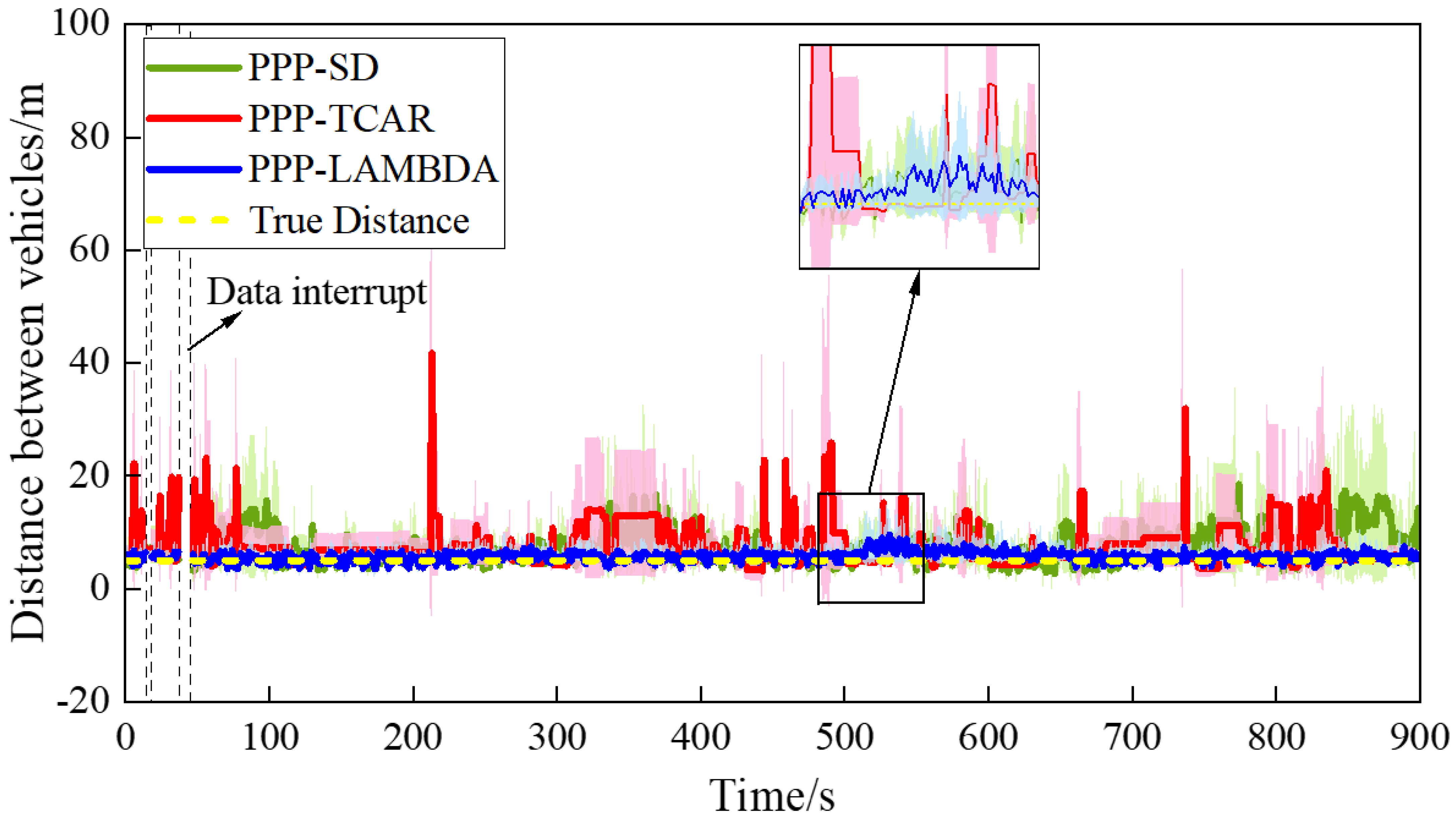
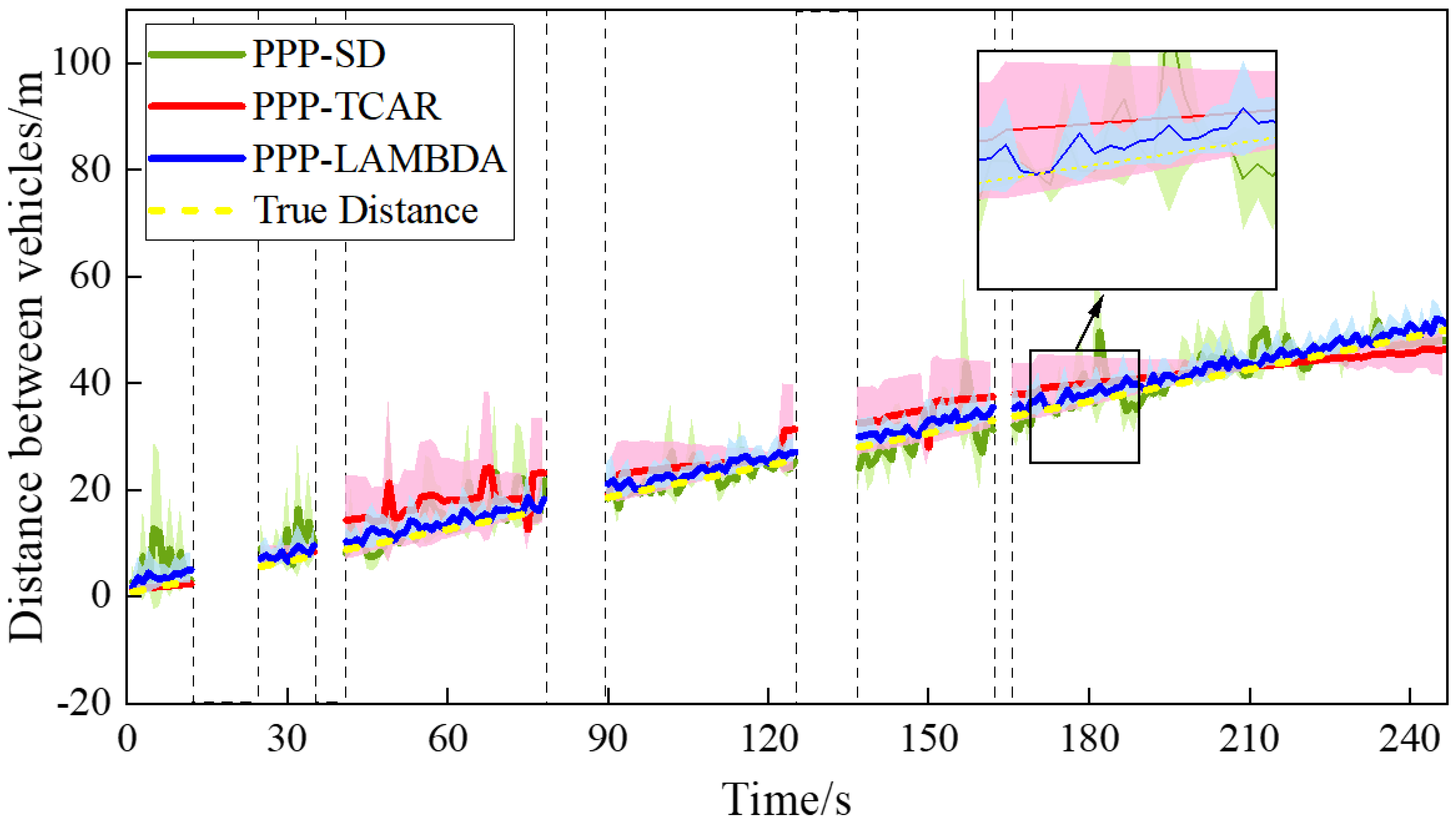
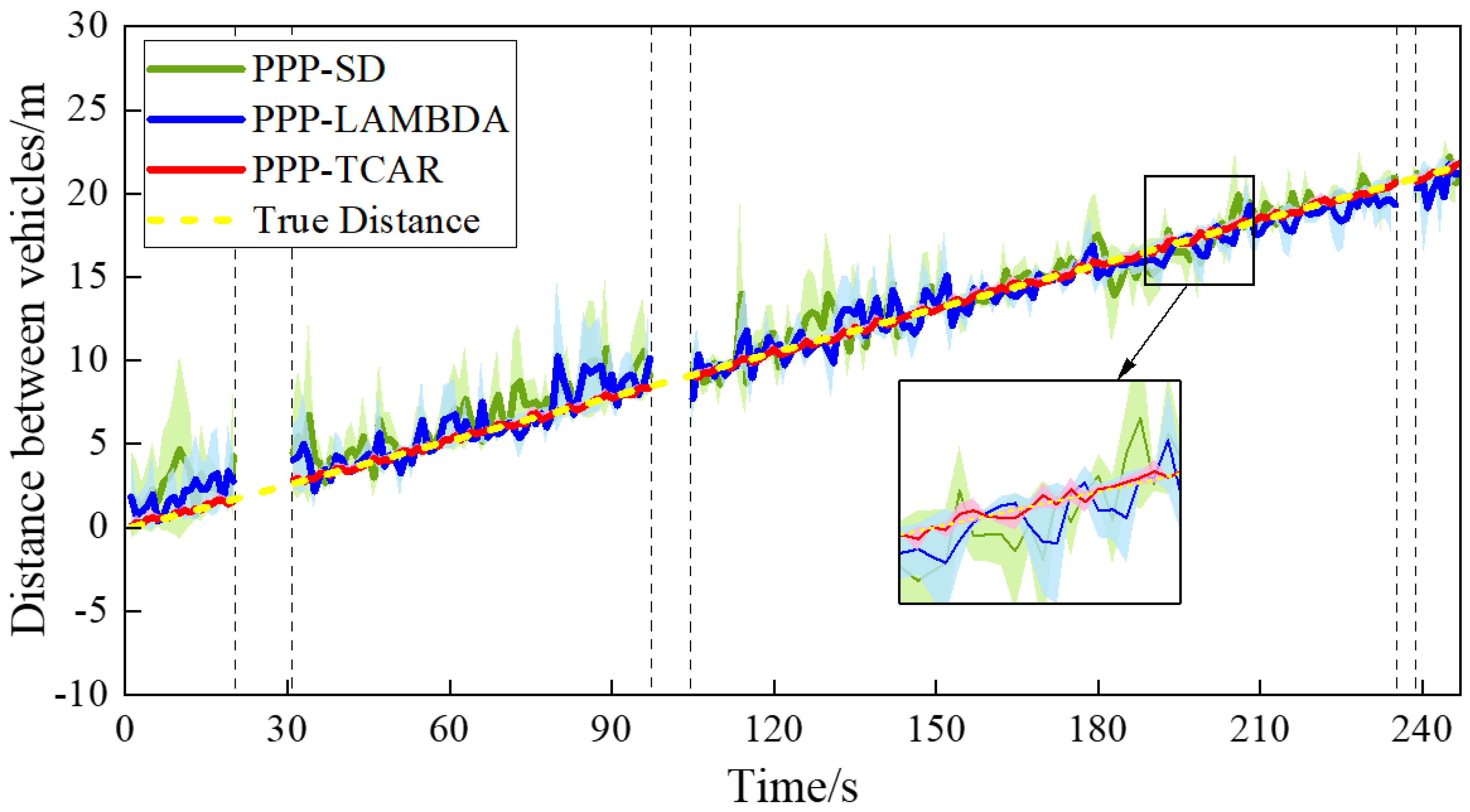
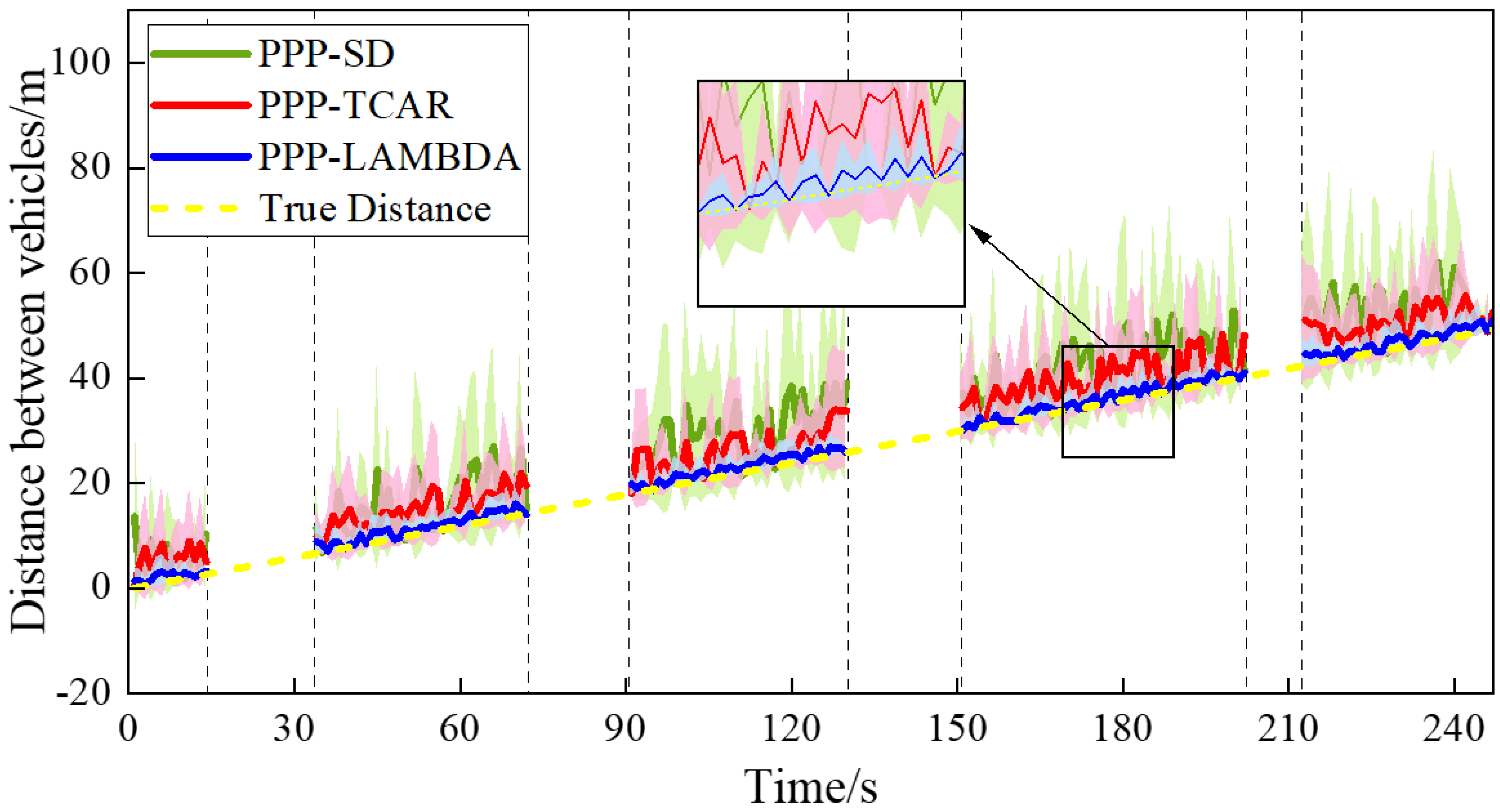
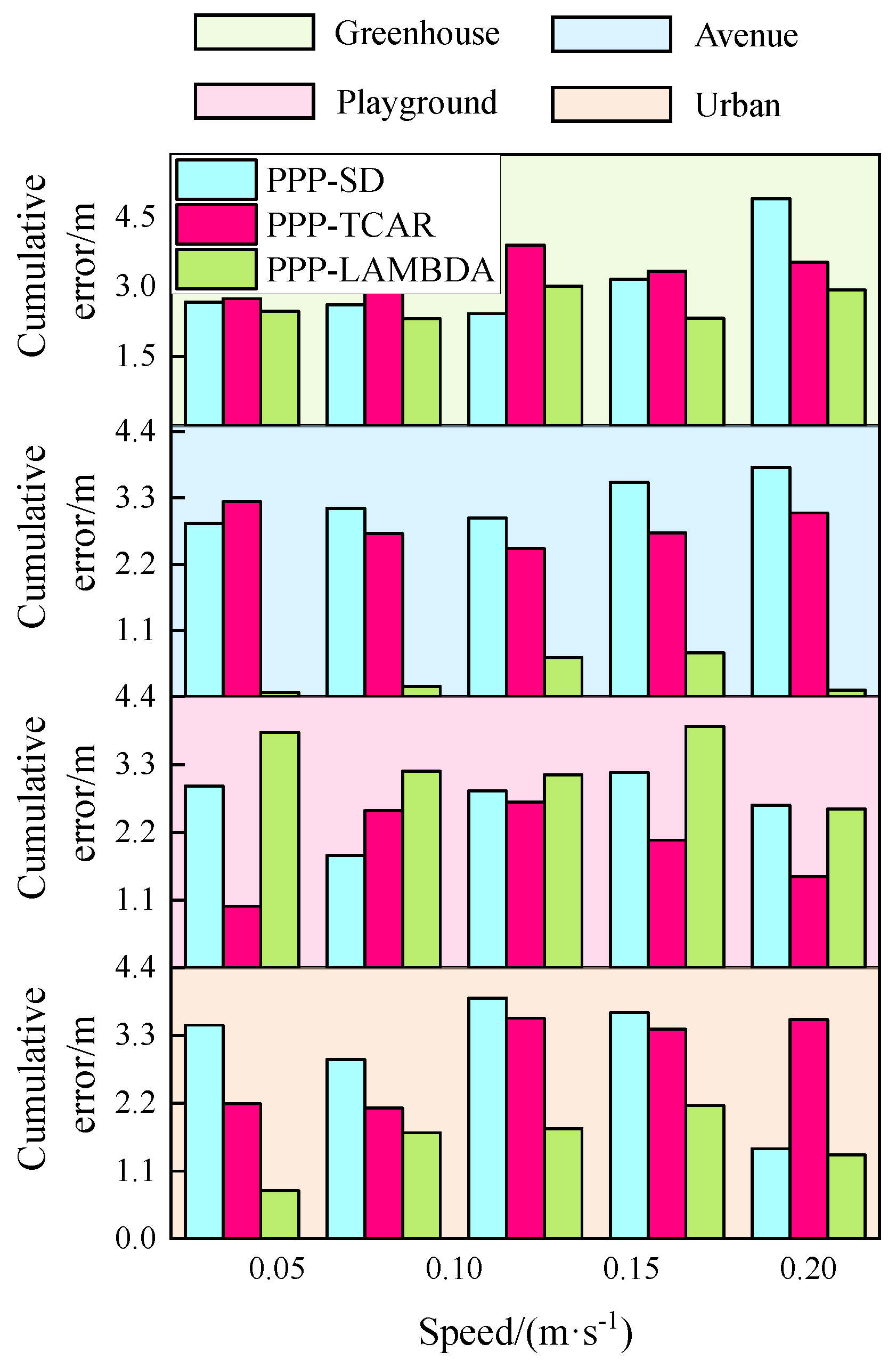
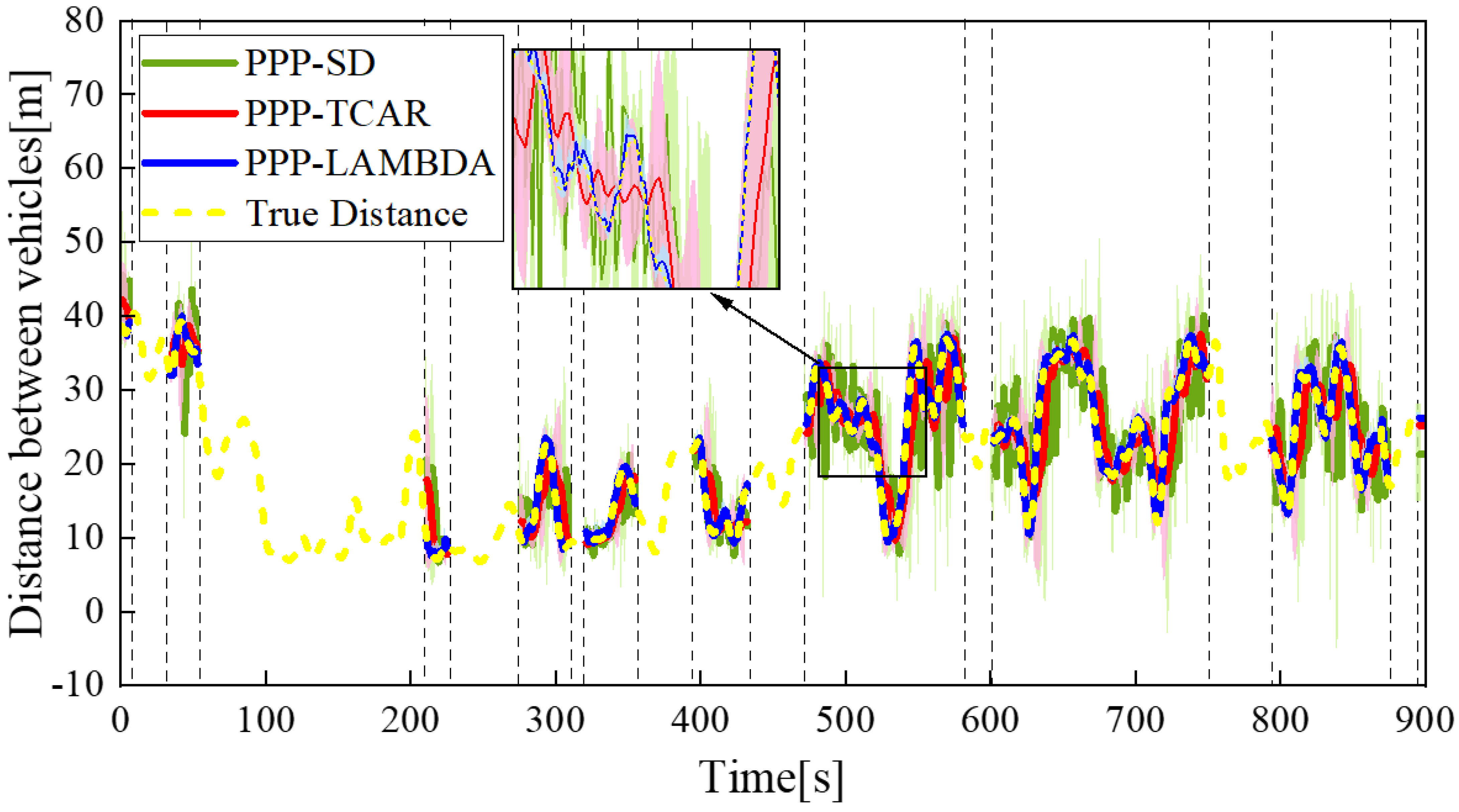
3.2. ASE (Absolute Static Experiment)
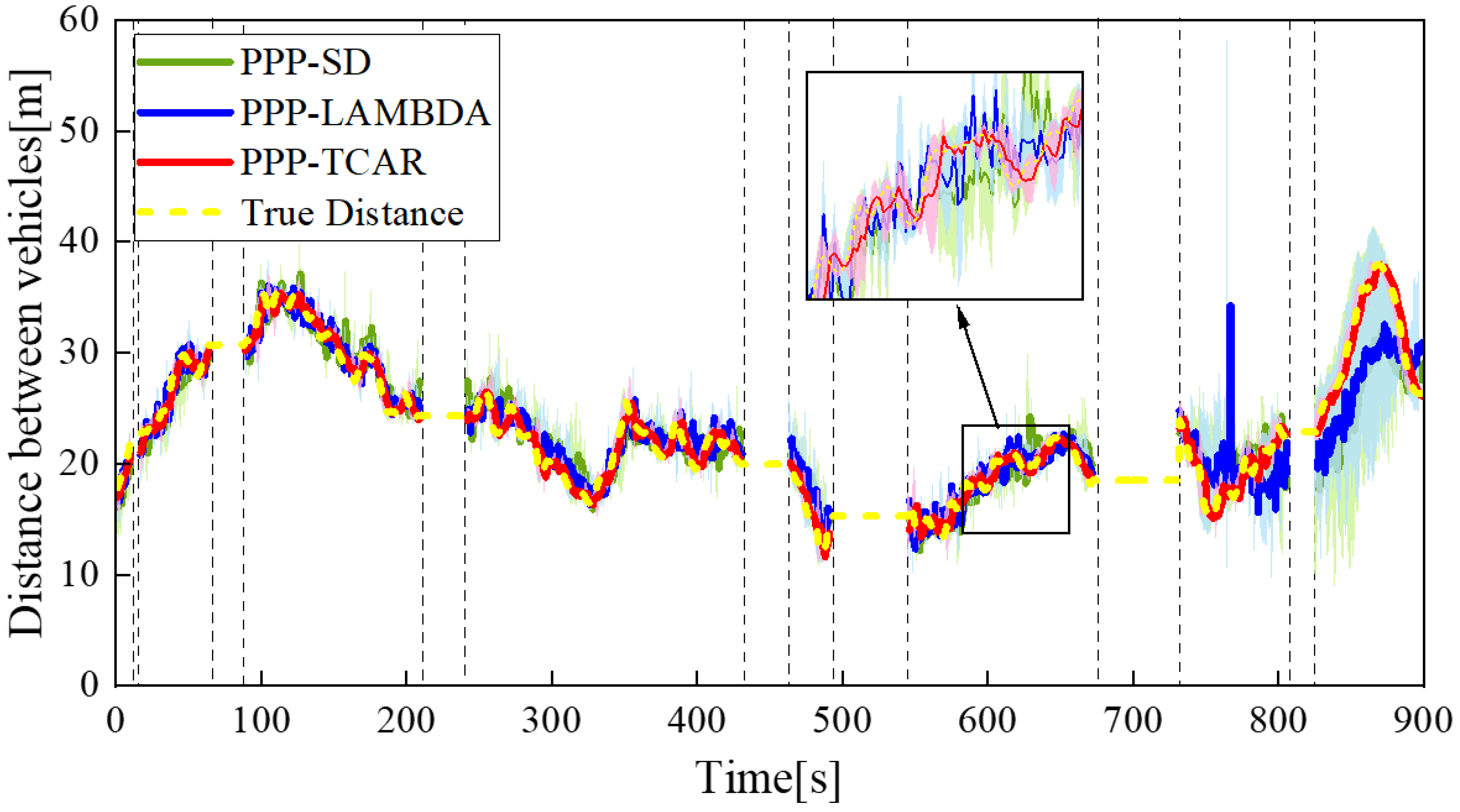
3.3. RSE (Relative Static Experiment)
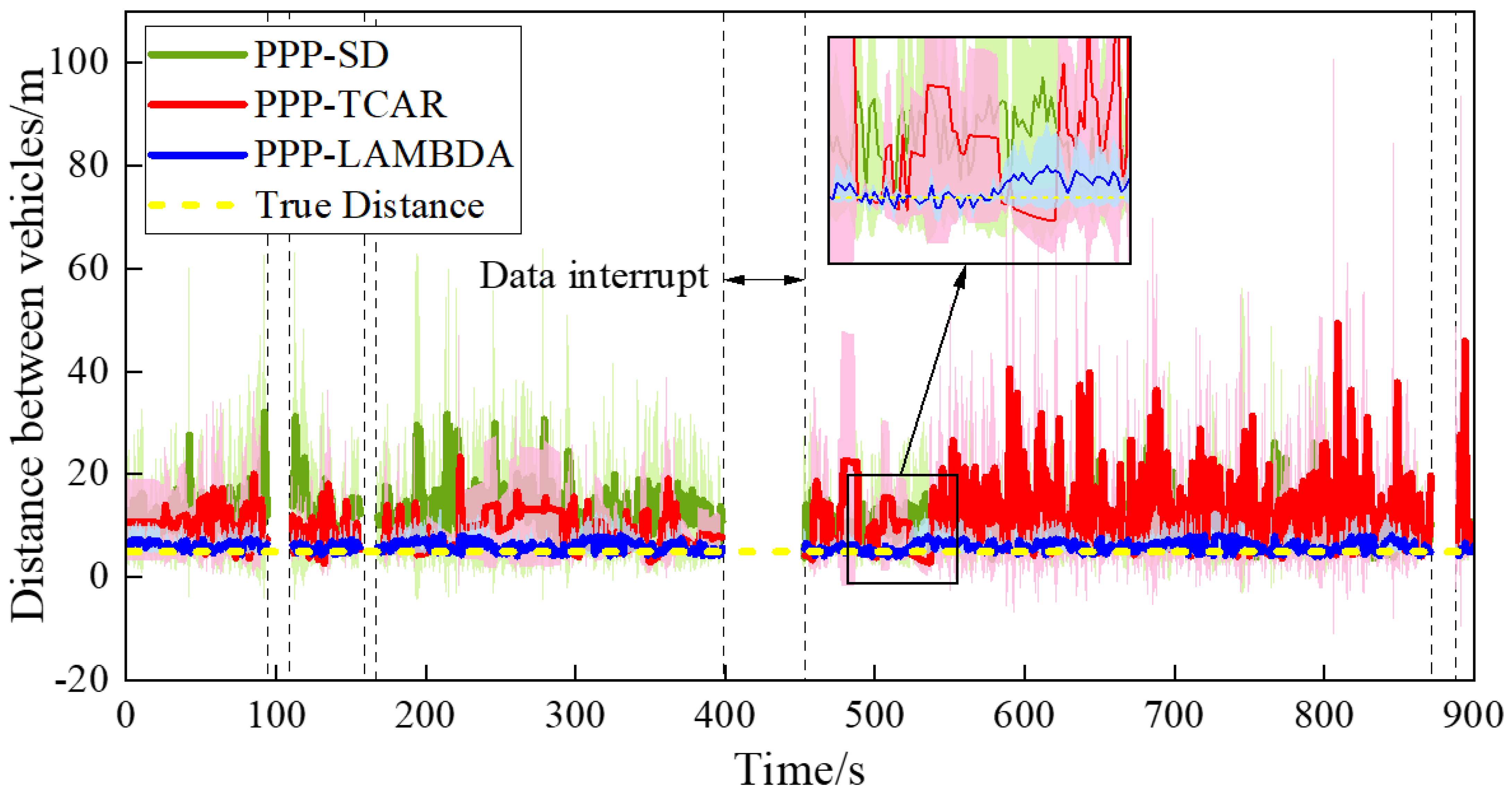
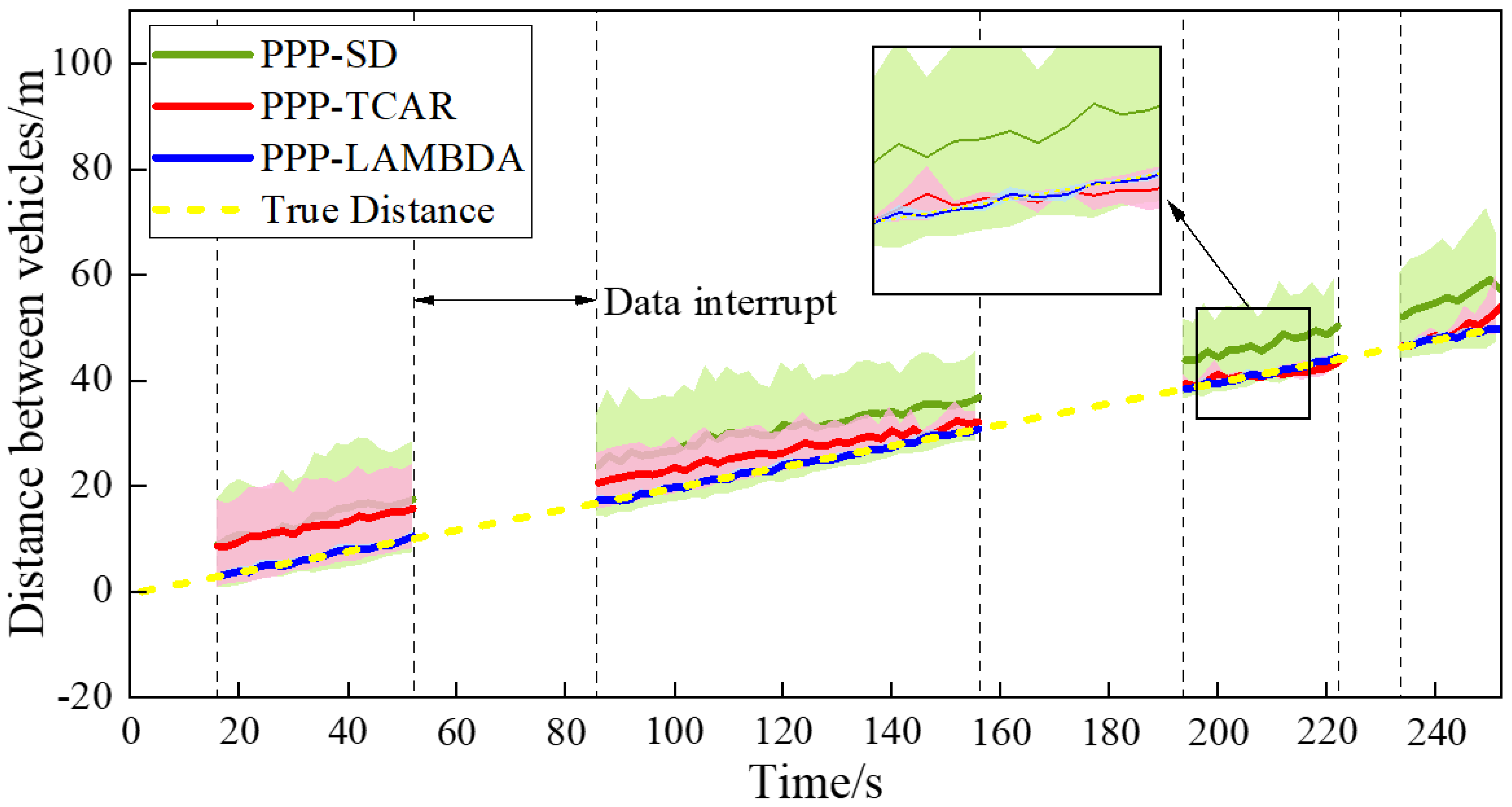
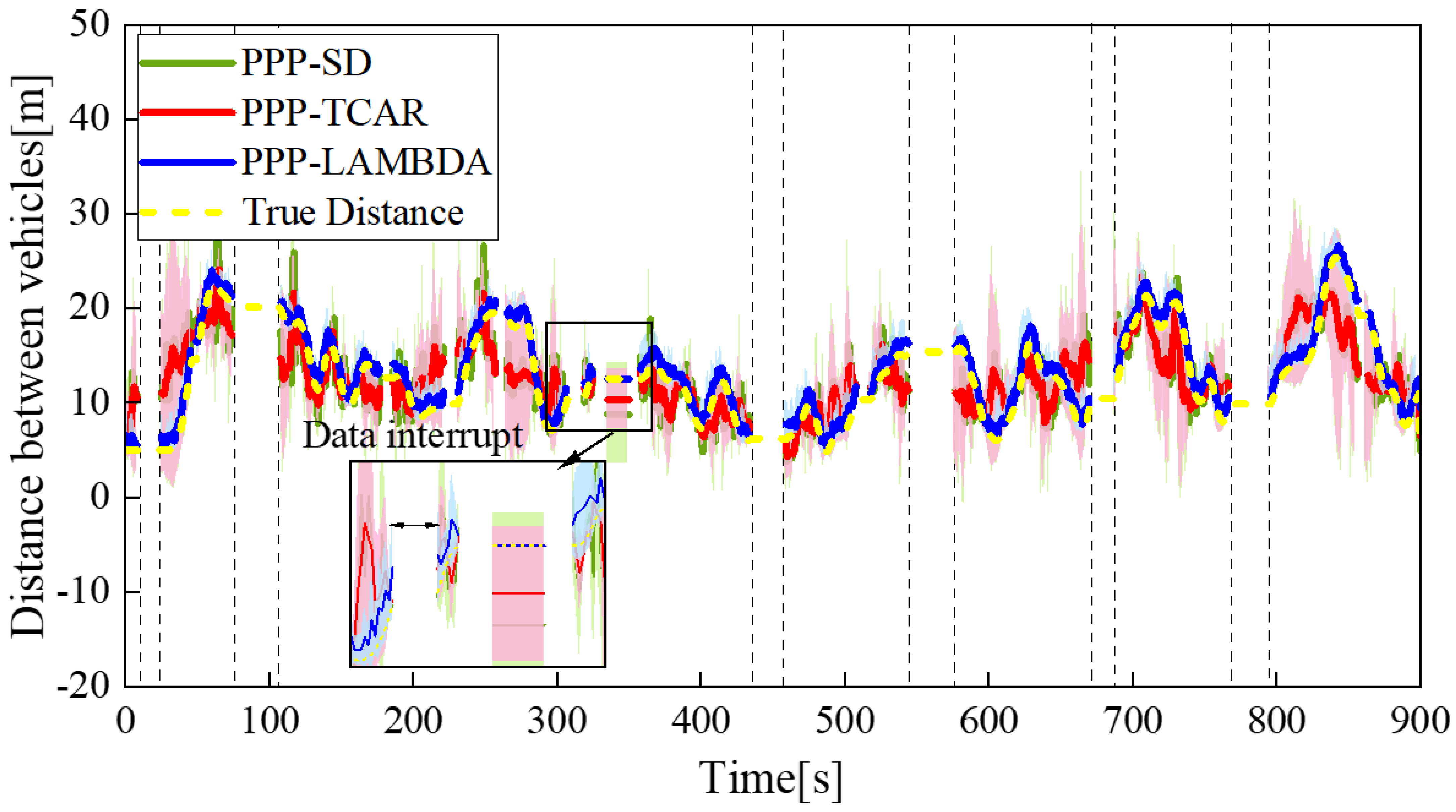
3.4. OMOSE (One Moving and One Stationary Experiment)
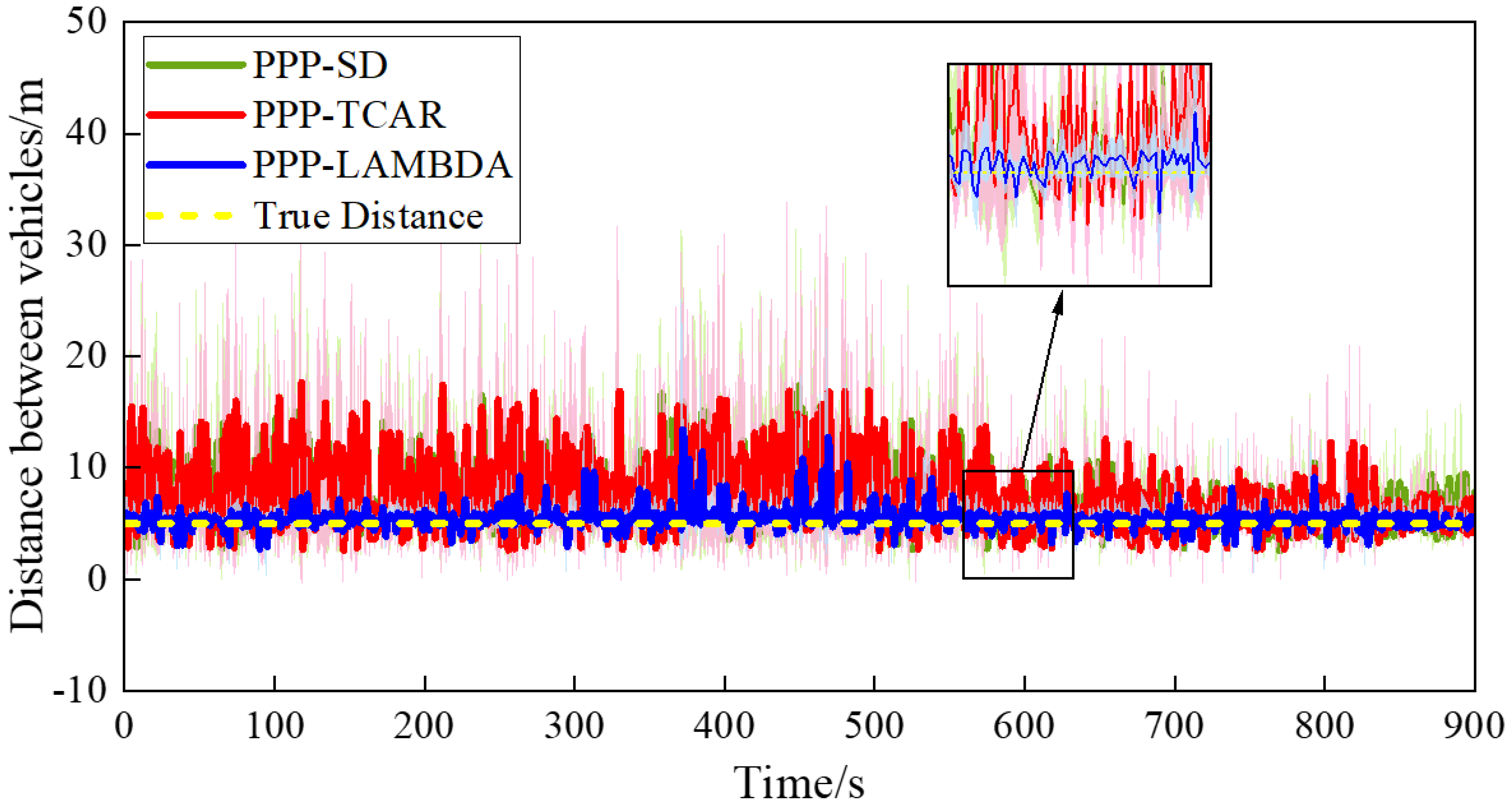
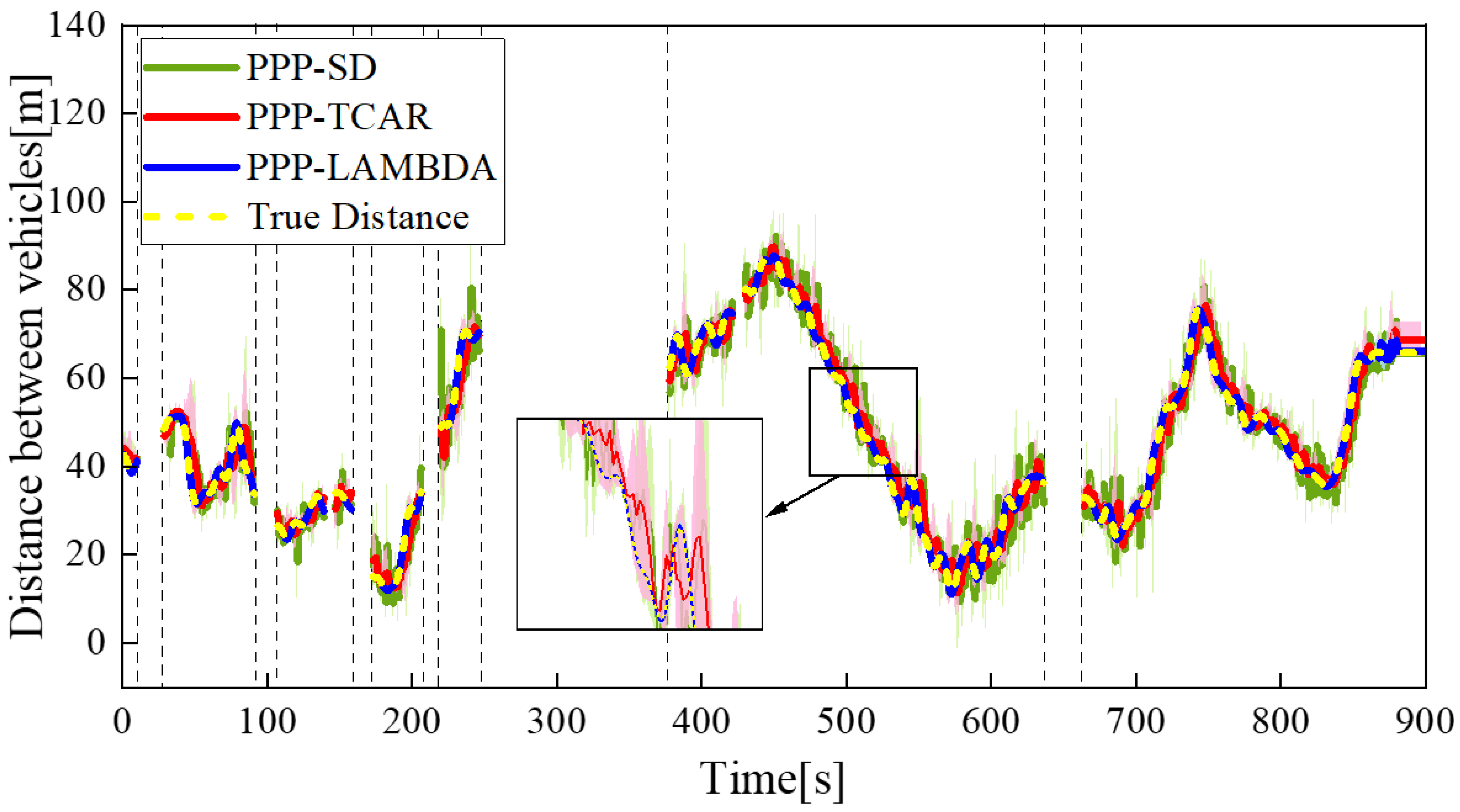
3.5. RME (Random Motion Experiment)
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Radočaj, D.; Plaščak, I.; Jurišić, M. Global Navigation Satellite Systems as State-of-the-Art Solutions in Precision Agriculture: A Review of Studies Indexed in the Web of Science. Agriculture 2023, 13, 1417. [Google Scholar] [CrossRef]
- Guo, W. Application of Geographic Information System and Automated Guidance System in Optimizing Contour and Terrace Farming. Agriculture 2018, 8, 142. [Google Scholar] [CrossRef]
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision Farming in Hilly Areas: The Use of Network RTK in GNSS Technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef]
- Sambo, D.W.; Forster, A.; Yenke, B.O.; Sarr, I.; Gueye, B.; Dayang, P. Wireless Underground Sensor Networks Path Loss Model for Precision Agriculture (WUSN-PLM). IEEE Sens. J. 2020, 20, 5298–5312. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, S.J.; Han, F.X.; Chai, M.Q.; Jiang, H.; Zhang, H.M. Data Collection for Target Localization in Ocean Monitoring Radar-Communication Networks. Remote Sens. 2023, 15, 5126. [Google Scholar] [CrossRef]
- Chen, L.B.; Huang, G.Z.; Huang, X.R.; Wang, W.C. A Self-Supervised Learning-Based Intelligent Greenhouse Orchid Growth Inspection System for Precision Agriculture. IEEE Sens. J. 2022, 22, 24567–24577. [Google Scholar] [CrossRef]
- Kan, X.Y.; Thayer, T.C.; Carpin, S.; Karydis, K. Task Planning on Stochastic Aisle Graphs for Precision Agriculture. IEEE Robot. Autom. Lett. 2021, 6, 3287–3294. [Google Scholar] [CrossRef]
- Xue, D.Z.; Huang, W. Smart Agriculture Wireless Sensor Routing Protocol and Node Location Algorithm Based on Internet of Things Technology. IEEE Sens. J. 2021, 21, 24967–24973. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, X.Y.; Shu, L.; Hancke, G.P.; Abu-Mahfouz, A.M. From Industry 4.0 to Agriculture 4.0: Current Status, Enabling Technologies, and Research Challenges. IEEE Trans. Ind. Inform. 2021, 17, 4322–4334. [Google Scholar] [CrossRef]
- Ding, F.; Zhang, W.; Luo, X.; Zhang, Z.; Wang, M.; Li, H.; Peng, M.; Hu, L. Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System. Agriculture 2022, 12, 2052. [Google Scholar] [CrossRef]
- Yang, L.; Wang, X.; Li, Y.; Xie, Z.; Xu, Y.; Han, R.; Wu, C. Identifying Working Trajectories of the Wheat Harvester In-Field Based on K-Means Algorithm. Agriculture 2022, 12, 1837. [Google Scholar] [CrossRef]
- Sirikun, C.; Samseemoung, G.; Soni, P.; Langkapin, J.; Srinonchat, J. A Grain Yield Sensor for Yield Mapping with Local Rice Combine Harvester. Agriculture 2021, 11, 897. [Google Scholar] [CrossRef]
- Rohani, M.; Gingras, D.; Vigneron, V.; Gruyer, D. A New Decentralized Bayesian Approach for Cooperative Vehicle Localization Based on Fusion of GPS and VANET Based Inter-Vehicle Distance Measurements. IEEE Intell. Transp. Syst. Mag. 2015, 7, 85–95. [Google Scholar] [CrossRef]
- Naseri, H.; Koivunen, V. A Bayesian Algorithm for Distributed Network Localization Using Distance and Direction Data. IEEE Trans. Signal Inf. Process Over Netw. 2019, 5, 290–304. [Google Scholar] [CrossRef]
- Wu, H.F.; Mei, X.J.; Chen, X.Q.; Li, J.J.; Wang, J.P. Mohapatra. A novel cooperative localization algorithm using enhanced particle filter technique in maritime search and rescue wireless sensor network. ISA Trans. 2018, 78, 39–46. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.H.; Zhang, X.P.; Cui, X.W.; Lu, M.Q. Optimal Localization with Sequential Pseudorange Measurements for Moving Users in a Time Division Broadcast Positioning System. IEEE Internet Things J. 2021, 8, 8883–8896. [Google Scholar] [CrossRef]
- Jiao, H.; Tao, X.; Chen, L.; Zhou, X.; Ju, Z. GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter. Remote Sens. 2024, 16, 1009. [Google Scholar] [CrossRef]
- Nijak, M.; Skrzypczyński, P.; Ćwian, K.; Zawada, M.; Szymczyk, S.; Wojciechowski, J. On the Importance of Precise Positioning in Robotised Agriculture. Remote Sens. 2024, 16, 985. [Google Scholar] [CrossRef]
- Ma, X.F.; Maruyama, T.; Ma, G.; Takeda, T. Determination of GPS receiver differential biases by neural network parameter estimation method. Radio Sci. 2005, 40, 1–13. [Google Scholar] [CrossRef]
- Tahir, M.; Afzal, S.S.; Chughtai, M.S.; Ali, K. On the Accuracy of Inter-Vehicular Range Measurements Using GNSS Observables in a Cooperative Framework. IEEE Trans. Intell. Transp. Syst. 2019, 20, 682–691. [Google Scholar] [CrossRef]
- Yan, Z.; Chen, X.Y.; Tang, X.H.; Zhu, X.F. Design and Performance Evaluation of the Improved INS-Assisted Vector Tracking for the Multipath in Urban Canyons. IEEE Trans. Instrum. Meas. 2022, 71, 1–16. [Google Scholar] [CrossRef]
- Zhang, G.H.; Wen, W.S.; Xu, B.; Hsu, L.T. Extending Shadow Matching to Tightly-Coupled GNSS/INS Integration System. IEEE Trans. Veh. Technol. 2020, 69, 4979–4991. [Google Scholar] [CrossRef]
- Yuan, Y.; Shen, F.; Li, X.D. GPS multipath and NLOS mitigation for relative positioning in urban environments. Aerosp. Sci. Technol. 2022, 107, 106315. [Google Scholar] [CrossRef]
- Liu, K.; Lim, H.B.; Frazzoli, E.; Ji, H.L.; Lee, V.C.S. Improving Positioning Accuracy Using GPS Pseudorange Measurements for Cooperative Vehicular Localization. IEEE Trans. Veh. Technol. 2014, 63, 2544–2556. [Google Scholar] [CrossRef]
- Shi, G.Q.; He, X.F.; Xiao, R.Y. Acquiring Three-Dimensional Deformation of Kilauea’s South Flank from GPS and DInSAR Integration Based on the Ant Colony Optimization. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2506–2510. [Google Scholar]
- Zhang, Q.Q.; Zhao, L.; Zhou, J.H. A Novel Weighting Approach for Variance Component Estimation in GPS/BDS PPP. IEEE Sens. J. 2019, 19, 3763–3771. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. Optimal Data Fusion Algorithm for Navigation Using Triple Integration of PPP-GNSS, INS, and Terrestrial Ranging System. IEEE Sens. J. 2015, 15, 5634–5644. [Google Scholar] [CrossRef]
- Li, T.; Pei, L.; Xiang, Y.; Wu, Q.; Xia, S.; Tao, L.H.; Guan, X.J.; Yu, W.X. P3-LOAM: PPP/LiDAR Loosely Coupled SLAM with Accurate Covariance Estimation and Robust RAIM in Urban Canyon Environment. IEEE Sens. J. 2021, 21, 6660–6671. [Google Scholar] [CrossRef]
- Lee, H.K.; Lee, J.G.; Jee, G.I. GPS Multipath Detection Based on Sequence of Successive-Time Double-Differences. IEEE Signal Process. Lett. 2004, 11, 316–319. [Google Scholar] [CrossRef]
- Scataglini, T.; Pagola, F.; Cogo, J.; Garca, J.G. Attitude Estimation Using GPS Carrier Phase Single Differences. IEEE Lat. Am. Trans. 2014, 12, 847–852. [Google Scholar] [CrossRef]
- Bai, X.W.; Wen, W.S.; Hsu, L.T. Time-Correlated Window-Carrier-Phase-Aided GNSS Positioning Using Factor Graph Optimization for Urban Positioning. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3370–3384. [Google Scholar] [CrossRef]
- Pin, M.I.; Marucco, G.; Falco, G.; Gianluca, F.; Mario, N.; Wim, D.W. Experimental Testbed and Methodology for the Assessment of RTK GNSS Receivers Used in Precision Agriculture. IEEE Access 2020, 8, 14690–14703. [Google Scholar] [CrossRef]
- Yang, X.; Shu, L.; Chen, J.N.; Ferrag, M.A.; Wu, J.; Nurellari, E.; Huang, K.A. Survey on Smart Agriculture: Development Modes, Technologies, and Security and Privacy Challenges. IEEE/CAA J. Autom. Sin. 2021, 8, 273–302. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.Z.; Shi, W.Z.; Chen, L. Precise 3D Indoor Localization and Trajectory Optimization Based on Sparse Wi-Fi FTM Anchors and Built-In Sensors. IEEE Trans. Veh. Technol. 2022, 71, 4042–4056. [Google Scholar] [CrossRef]
- Hu, R.; Zhang, P.F.; Zhang, R.; Fan, L.H.; Han, J.Q.; Hong, J.; Liu, J.H.; Lu, X.C. Real-time and dynamic time transfer method based on double-differenced real-time kinematic mode. IET Radar Sonar Navig. 2021, 15, 143–153. [Google Scholar]
- Li, B.F.; Feng, Y.M.; Shen, Y.Z. Three carrier ambiguity resolution: Distance-independent performance demonstrated using semi-generated triple frequency GPS signals. GPS Solut. 2010, 14, 177–184. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Zabalegui, P.; De Miguel, G.; Fernández-Berrueta, N.; Aizpuru, J.; Mendizabal, J.; Adín, I. On the Use of Ultra-WideBand-Based Augmentation for Precision Maneuvering. Remote Sens. 2024, 16, 911. [Google Scholar] [CrossRef]
- Ren, Z.; Liu, S.; Liu, J.; Dai, J.; Lv, Y. Research on INS/GNSS/UWB Adaptive Robust ESKF Kinematic and Static Filtering Based on Cost Function. Eng. Proc. 2024, 60, 8. [Google Scholar]
- Chen, Z.; Xu, A.; Sui, X.; Hao, Y.; Zhang, C.; Shi, Z. NLOS Identification- and Correction-Focused Fusion of UWB and LiDAR-SLAM Based on Factor Graph Optimization for High-Precision Positioning with Reduced Drift. Remote Sens. 2022, 14, 4258. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Types | True Distance of ASE/m | Sampling Time/min | Sampling Days/d | Replicated Experimental Units |
|---|---|---|---|---|
| ASE | (5, 50), dim = 5 | 15 | 15 | 10 |
| RSE | (1, 10), dim = 1 | 15 | 15 | 10 |
| OMOSE | (0, 50), dim = 5 | 15 | 15 | 10 |
| RME | Random | 15 | 15 | 10 |
| Algorithm | Average Error of ASE/% | |||
|---|---|---|---|---|
| Complete-Cover Greenhouse | Partial-Cover Avenue | Open Playground | Urban | |
| PPP-SD | 6.73 | 3.95 | 4.64 | 41.06 |
| PPP-TCAR | 4.06 | 4.27 | 4.64 | 36.09 |
| PPP-LMBDA | 0.83 | 1.30 | 0.30 | 1.48 |
| Algorithm | Average Error of RSE /% | |||
|---|---|---|---|---|
| Complete-Cover Greenhouse | Partial-Cover Avenue | Open Playground | Urban | |
| PPP-SD | 8.67 | 17.22 | 5.53 | 32.40 |
| PPP-TCAR | 9.19 | 16.88 | 6.63 | 16.00 |
| PPP-LMBDA | 1.57 | 2.66 | 0.91 | 2.98 |
| Algorithm | Average Error of OMOSE/% | |||
|---|---|---|---|---|
| Complete-Cover Greenhouse | Partial-Cover Avenue | Open Playground | Urban | |
| PPP-SD | 9.63 | 3.29 | 1.27 | 9.36 |
| PPP-TCAR | 4.18 | 4.23 | 0.18 | 6.41 |
| PPP-LMBDA | 0.36 | 2.07 | 0.99 | 1.52 |
| Algorithm | Average Error of RME/% | |||
|---|---|---|---|---|
| Complete-Cover Greenhouse | Partial-Cover Avenue | Open Playground | Urban | |
| PPP-SD | 4.34 | 5.16 | 2.36 | 6.07 |
| PPP-TCAR | 3.96 | 3.70 | 0.90 | 3.79 |
| PPP-LMBDA | 1.43 | 0.12 | 2.18 | 0.60 |
| NO. | PPP-SD | PPP-TCAR | PPP-LAMBDA | Operation Status |
|---|---|---|---|---|
| Greenhouse farm machinery operation | * | ** | *** | Complete cover—absolute static state Complete cover—relative static state Complete cover—one moving and one static state Complete cover—random dynamic motion |
| Fixed-point picking operation of fruit forest | * | ** | *** | Partial cover—absolute static state Partial cover—relative static state Partial cover—one moving and one static state Partial cover—random dynamic motion |
| Cooperative operation of farm machinery in field | * | ** | *** | Open—absolute static state Open—relative static state |
| Farm machinery scheduling in the field | * | *** | ** | Open—one moving and one static state Open—random dynamic motion |
| Urban landscaping operations | * | ** | *** | “Urban Canyon” —absolute static state “Urban Canyon” —relative static state “Urban Canyon” —one moving and one static state “Urban Canyon” —random dynamic motion |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, K.; Zhang, Z.; Wang, F. Multi-Scenario Variable-State Robust Fusion Algorithm for Ranging Analysis Framework. Agriculture 2024, 14, 516. https://doi.org/10.3390/agriculture14040516
Xie K, Zhang Z, Wang F. Multi-Scenario Variable-State Robust Fusion Algorithm for Ranging Analysis Framework. Agriculture. 2024; 14(4):516. https://doi.org/10.3390/agriculture14040516
Chicago/Turabian StyleXie, Kaiting, Zhaoguo Zhang, and Faan Wang. 2024. "Multi-Scenario Variable-State Robust Fusion Algorithm for Ranging Analysis Framework" Agriculture 14, no. 4: 516. https://doi.org/10.3390/agriculture14040516
APA StyleXie, K., Zhang, Z., & Wang, F. (2024). Multi-Scenario Variable-State Robust Fusion Algorithm for Ranging Analysis Framework. Agriculture, 14(4), 516. https://doi.org/10.3390/agriculture14040516