
Spike Device with Worm Gear Unit for Driving Wheels to Improve the Traction Performance of Compact Tractors on Grass Plots


 , , , and
, , , and
Abstract
1. Introduction
2. Materials and Methods
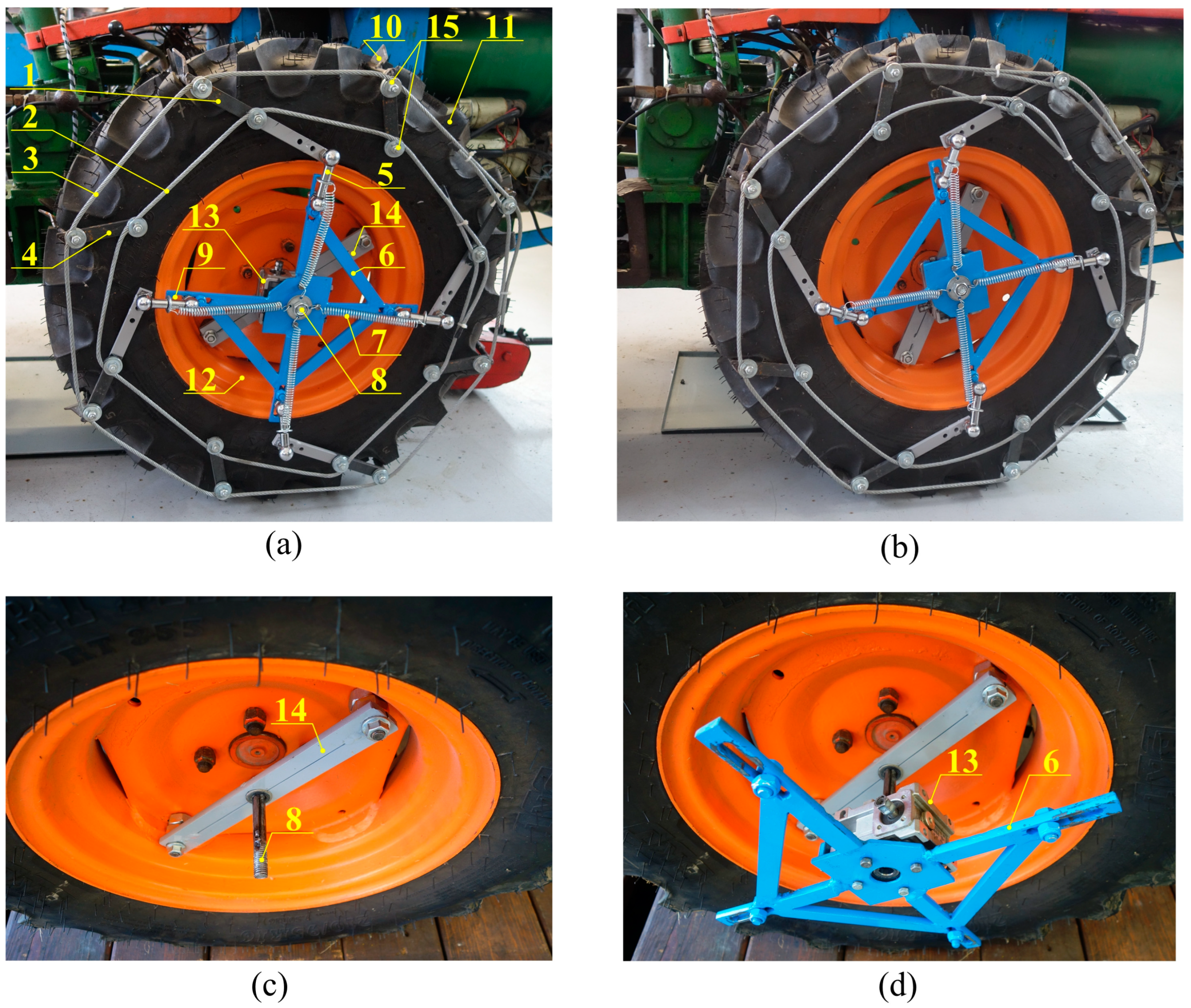
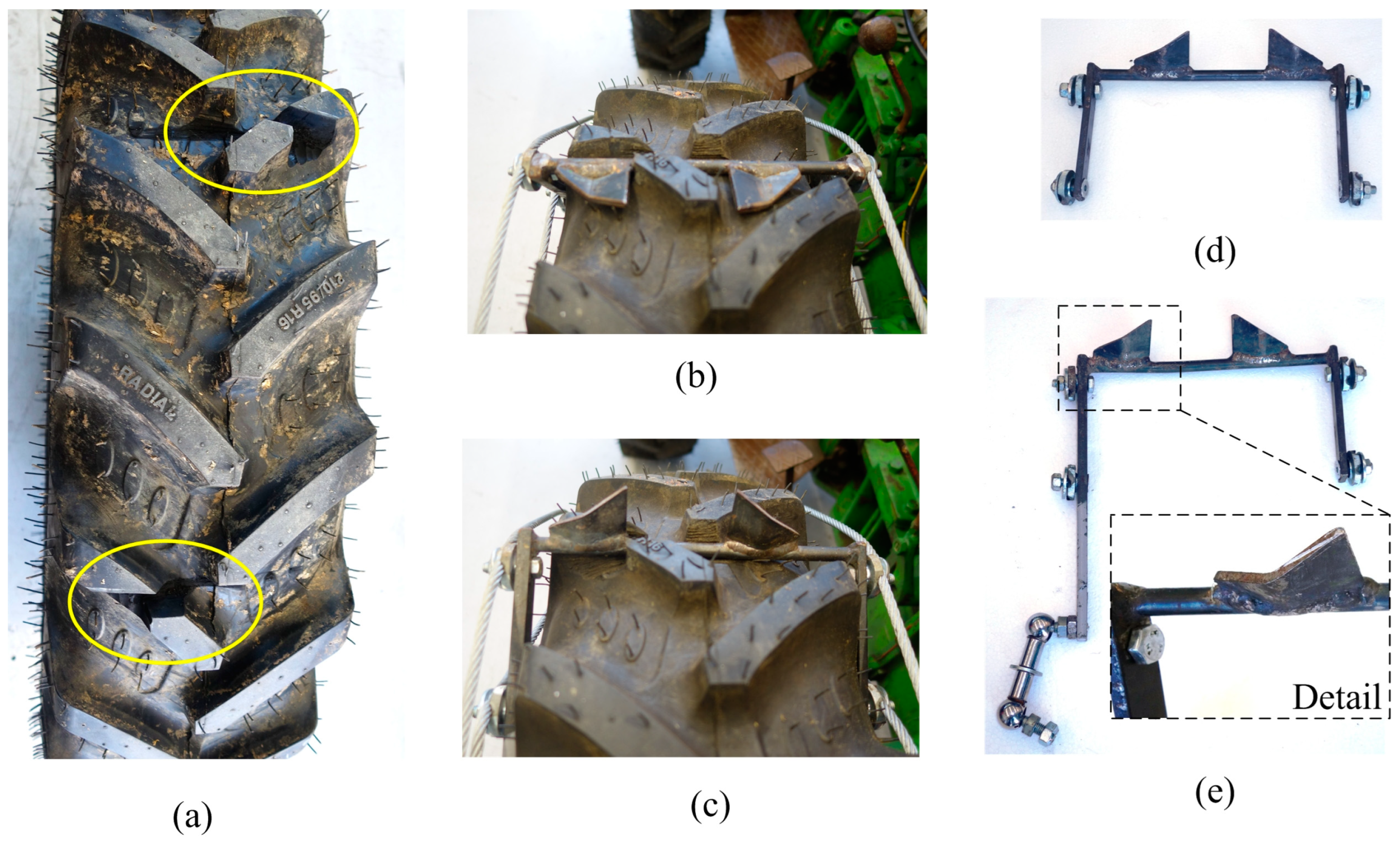
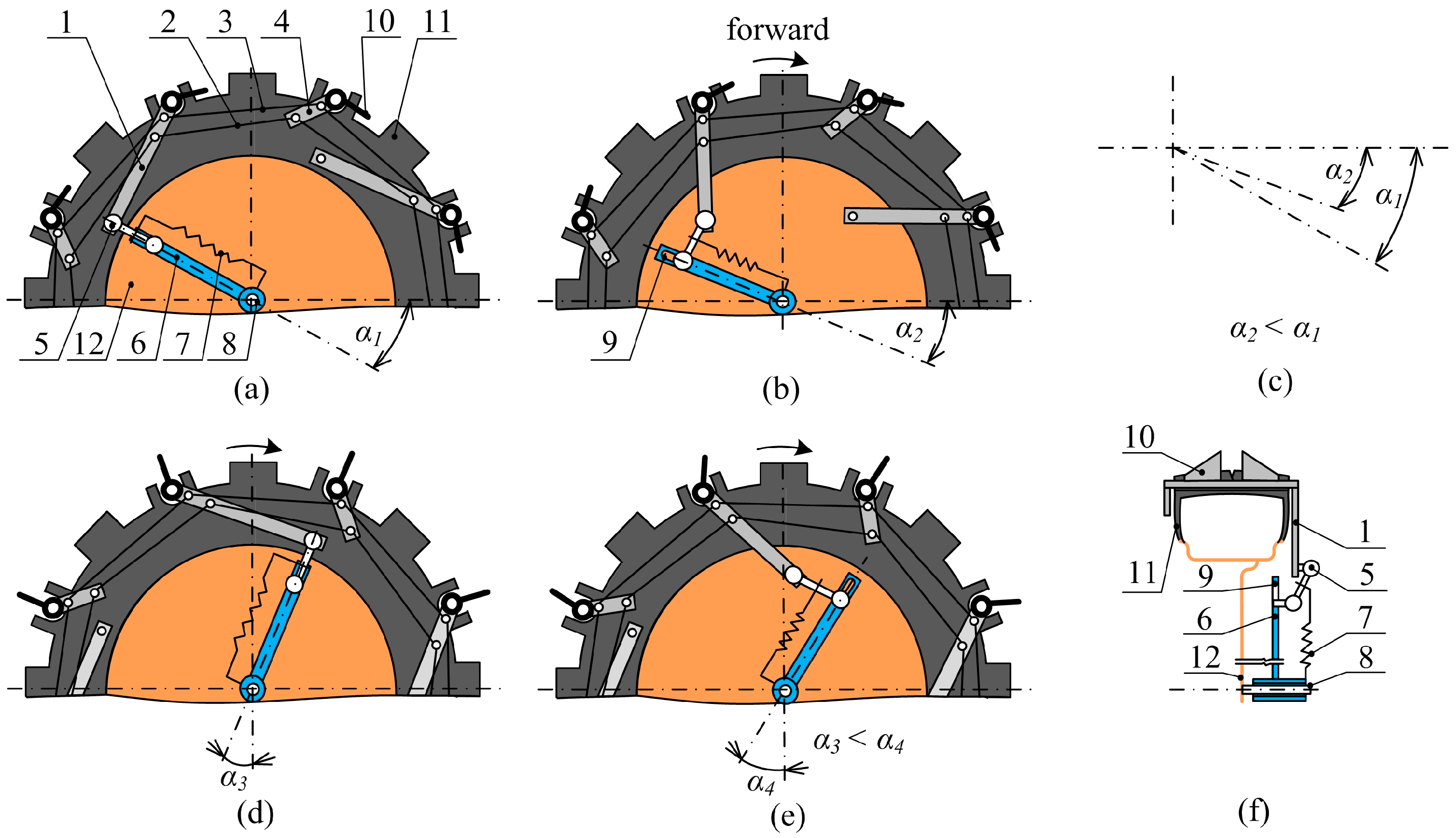
2.1. Spike Device with Worm Gear Unit
2.2. Test Tractor
2.3. Measurement Devices for Experimental Field Tests
2.4. Drawbar Pull Test and Motion Resistance Measurements
2.5. Tractive Performance Evaluation of Various Front-Driving Wheel Types
2.6. Experimental Conditions
3. Results and Discussion
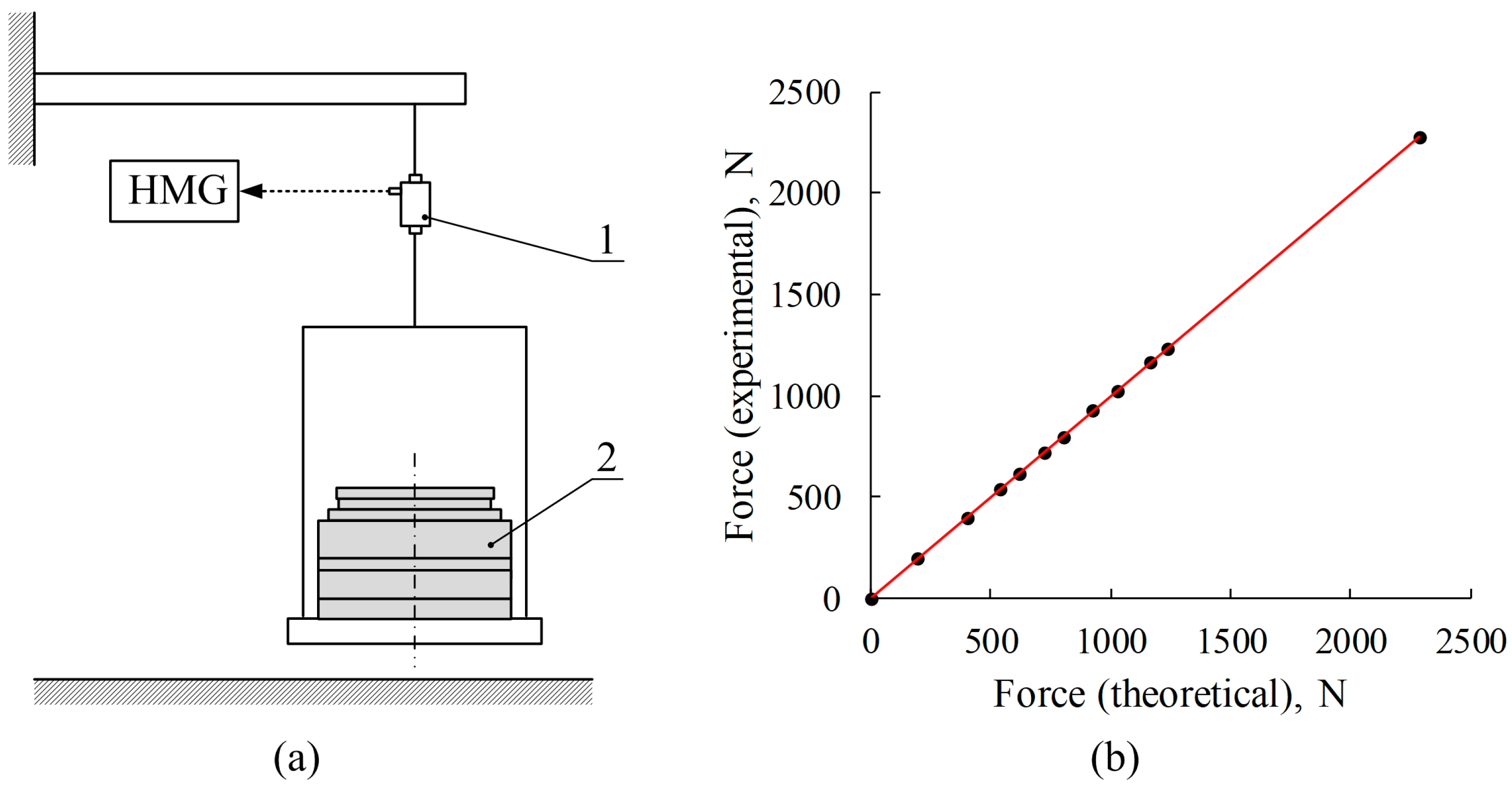
3.1. Properties of the Spike Device with a Worm Gear Unit
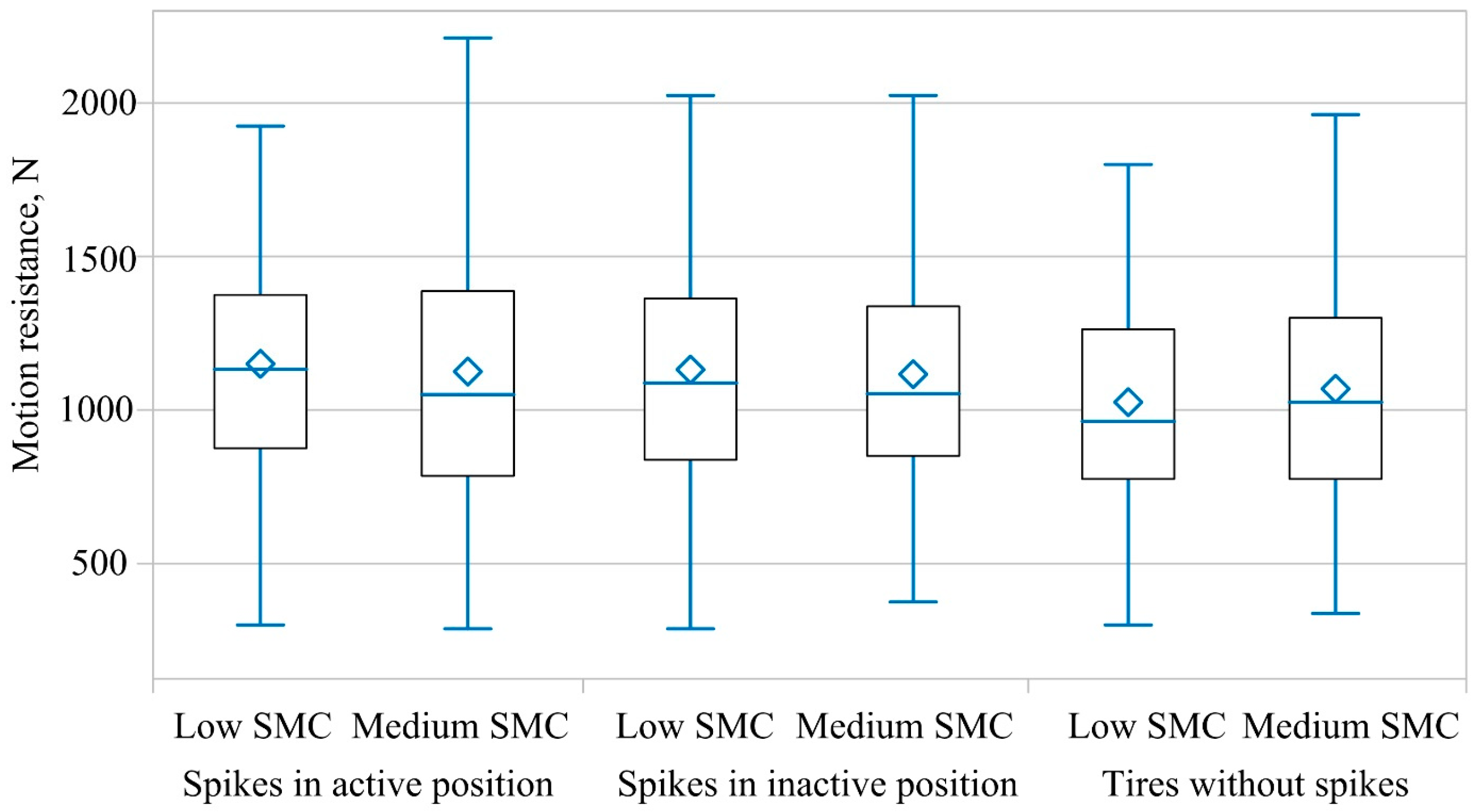
3.2. Motion Resistance
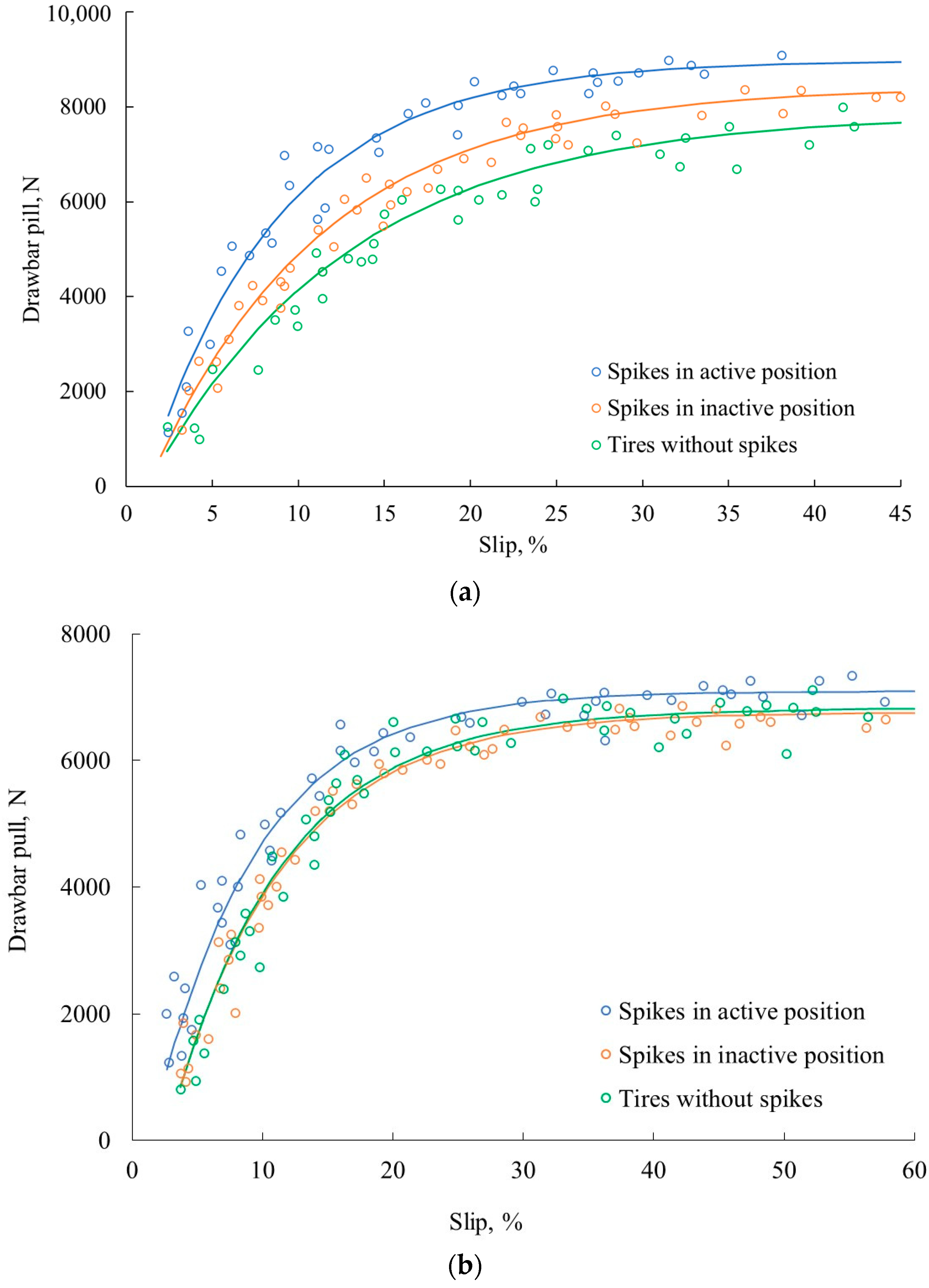
3.3. Drawbar Pull
3.4. Tractive Efficiency
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Botta, G.F.; Jorajuria, D.; Draghi, L.M. Influence of the axle load, tyre size and configuration on the compaction of a freshly tilled clayey soil. J. Terramech. 2002, 39, 47–54. [Google Scholar] [CrossRef]
- Regazzi, N.; Maraldi, M.; Molari, G. A theoretical study of the parameters affecting the power delivery efficiency of an agricultural tractor. Biosyst. Eng. 2019, 186, 214–227. [Google Scholar] [CrossRef]
- Sahay, C.S.; Tewari, V.K. Computer simulation of tractor single-point drawbar performance. Biosyst. Eng. 2004, 88, 419–428. [Google Scholar] [CrossRef]
- Botta, G.F.; Tolon-Becerra, A.; Tourn, M.; Lastra-Bravo, X.; Rivero, D. Agricultural traffic: Motion resistance and soil compaction in relation to tractor design and different soil conditions. Soil Tillage Res. 2012, 120, 92–98. [Google Scholar] [CrossRef]
- Taghavifar, H.; Mardani, A. Net traction of a driven wheel as affected by slippage, velocity and wheel load. J. Saudi Soc. Agric. Sci. 2015, 14, 167–171. [Google Scholar] [CrossRef]
- Damanauskas, V.; Janulevicius, A.; Pupinis, G. Influence of extra weight and tyre pressure on fuel consumption at normal tractor slippage. J. Agric. Sci. 2015, 7, 55–67. [Google Scholar] [CrossRef]
- Sharma, A.K.; Pandey, K.P. Matching tyre size to weight, speed and power available for maximising pulling ability of agricultural tractors. J. Terramech. 2001, 38, 89–97. [Google Scholar] [CrossRef]
- Malý, V.; Tóth, F.; Mareček, J.; Krčálová, E. Laboratory test of the soil compaction. Acta Univ. Agric. Silv. Mendel. Brun. 2015, 63, 77–85. [Google Scholar] [CrossRef]
- Damanauskas, V.; Janulevicius, A. Differences in tractor performance parameters between single-wheel 4WD and dual-wheel 2WD driving systems. J. Terramech. 2015, 60, 63–73. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G.; Gilandeh, Y.A.; Gundoshmian, T.M. The effect of the tractor driving system on its performance and fuel consumption. Energy 2020, 202, 117803. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. Analytical description of power delivery efficiency of front wheel assist tractor in tillage works. J. Biosyst. Eng. 2021, 46, 236–253. [Google Scholar] [CrossRef]
- Semetko, J.; Janoško, I.; Pernis, P. Determination of power of multidrive vehicles. Acta Technol. Agric. 2004, 7, 20–23. [Google Scholar]
- Molari, G.; Bellentani, L.; Guarnieri, A.; Walker, M.; Sedoni, E. Performance of an agricultural tractor fitted with rubber tracks. Biosyst. Eng. 2012, 111, 57–63. [Google Scholar] [CrossRef]
- Arvidsson, J.; Westlin, H.; Keller, T.; Gilbertsson, M. Rubber track systems for conventional tractors effects on soil compaction and traction. Soil Tillage Res. 2011, 117, 103–109. [Google Scholar] [CrossRef]
- Zoz, F.M.; Turner, R.J.; Shell, L.R. Power delivery efficiency: A valid measure of belt and tire tractor performance. Trans. ASAE 2002, 45, 509–518. [Google Scholar]
- Ekinci, S.; Çarman, K.; Kahramanlı, H. Investigation and modeling of the tractive performance of radial tires using off-road vehicles. Energy 2015, 93, 1953–1963. [Google Scholar] [CrossRef]
- Battiato, A.; Diserens, E. Influence of tyre inflation pressure and wheel load on the traction performance of a 65 kW MFWD tractor on a cohesive soil. J. Agric. Sci. 2013, 5, 197–215. [Google Scholar] [CrossRef]
- Čipliené, A.; Gurevičius, P.; Janulevičius, A.; Damanauskas, V. Experimental validation of tyre inflation pressure model to reduce fuel consumption during soil tillage. Biosyst. Eng. 2019, 186, 45–59. [Google Scholar] [CrossRef]
- Šmerda, T.; Čupera, J. Tire inflation and its influence on drawbar characteristics and performance-energetic indicators of a tractor set. J. Terramech. 2010, 47, 395–400. [Google Scholar] [CrossRef]
- Helexa, M. Monitoring the impact of tyre inflation pressure on tensile properties of forest tractor. Res. Agr. Eng. 2014, 60, 127–133. [Google Scholar] [CrossRef]
- Cutini, M.; Costa, C.; Brambilla, M.; Bisaglia, C. Relationship between the 3D footprint of an agricultural tire and drawbar pull using an artificial neural network. Appl. Eng. Agric. 2022, 38, 293–301. [Google Scholar] [CrossRef]
- Kučera, M.; Helexa, M.; Molenda, M. Selected tire characteristics and their relation to its radial stiffness. MM Sci. J. 2016, 9, 1524–1530. [Google Scholar] [CrossRef]
- Raheman, H.; Snigdharani, E. Development of a variable-diameter cage wheel for walking tractor and its performance evaluation in soil bin (simulating wetland). J. Inst. Eng. Ser. A 2020, 101, 41–48. [Google Scholar] [CrossRef]
- Md-Tahir, H.; Zhang, J.; Xia, J.; Zhang, C.; Zhou, H.; Zhu, Y. Rigid lugged wheel for conventional agricultural wheeled tractors—Optimising traction performance and wheel–soil interaction in field operations. Biosyst. Eng. 2019, 188, 14–23. [Google Scholar] [CrossRef]
- Yang, Y.; Sun, Y.; Ma, S. Drawbar pull of a wheel with an actively actuated lug on sandy terrain. J. Terramech. 2014, 56, 17–24. [Google Scholar] [CrossRef]
- Abrahám, R.; Majdan, R.; Kollárová, K.; Tkáč, Z.; Hajdu, Š.; Kubík, Ľ.; Masarovičová, S. Fatigue analysis of spike segment of special tractor wheels in terms of design improvement for chernozem soil. Agriculture 2022, 12, 471. [Google Scholar] [CrossRef]
- Abrahám, R.; Majdan, R.; Kollárová, K.; Tkáč, Z.; Olejár, M.; Matejková, E.; Kubík, Ľ. Frequency spectra analysis of drawbar pulls generated by special driving wheels improving tractive performance. Sensors 2021, 21, 2903. [Google Scholar] [CrossRef] [PubMed]
- Moinfar, A.M.; Shahgholi, G. Dimensional analysis of the tractor tractive efficiency parameters. Acta Technol. Agric. 2018, 21, 94–99. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G. The effect of tractor driving system type on its slip and rolling resistance and its modelling using ANFIS. Acta Technol. Agric. 2019, 22, 115–121. [Google Scholar] [CrossRef]
- Terek, M.; Tibenský, M. Outliers and some non-traditional measures of location in analysis of wages. Eur. Sci. J. 2014, 1, 480–486. [Google Scholar]
- Shi, Y.; Liu, J.; Huang, D.; Xu, M.; Zhai, S.; Zhang, W.; Jiang, P. Prediction and experimental study of tire slip rate based on chassis sinkage amount. Agriculture 2023, 13, 665. [Google Scholar] [CrossRef]
- Fanigliulo, R.; Biocca, M.; Grilli, R.; Fornaciari, L.; Gallo, P.; Benigni, S.; Mattei, P.; Pochi, D. Assessment of the performance of agricultural tires using a mobile test bench. Agriculture 2023, 13, 87. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. An experimental investigation of drawbar pull performance of front wheel assist tractors. Trans. Indian Natl. Acad. Eng. 2022, 7, 1369–1380. [Google Scholar] [CrossRef]
- Xue, L.; Xie, B.; Lin, F.; Cheng, S.; Li, L.; Liu, M.; Li, J. Field traction performance test analysis of bionic paddy wheel and vaned wheel. Biomimetics 2022, 7, 185. [Google Scholar] [CrossRef]
- Yang, F.; Sun, W.; Lin, G.; Zhang, W. Prediction of military vehicle’s drawbar pull based on an improved relevance vector machine and real vehicle tests. Sensors 2016, 16, 351. [Google Scholar] [CrossRef] [PubMed]
- Rasool, S.; Raheman, H. Improving the tractive performance of walking tractors using rubber tracks. Biosyst. Eng. 2018, 167, 51–62. [Google Scholar] [CrossRef]
- Nakanishi, R.; Nakashima, H.; Miyasaka, J.; Ohdoi, K. Tractive performance analysis of a lugged wheel by open-source 3D DEM software. J. Terramech. 2020, 92, 51–65. [Google Scholar] [CrossRef]
- Hendriadi, A.; Salokhe, V.M. Improvement of a power tiller cage wheel for use in swampy peat soils. J. Terramech. 2002, 39, 55–70. [Google Scholar] [CrossRef]
- Watyotha, C.; Salokhe, V.M. PM—Power and machinery: Tractive performance of cage wheels with opposing circumferential lugs. J. Agric. Eng. Res. 2001, 79, 389–398. [Google Scholar] [CrossRef]
- Wilson, C.A.; Kushwaha, R.L.; Mehta, A.V. Performance of dyna-bite traction system. SAE Trans. J. Commer. Veh. 1993, 102, 265–271. [Google Scholar]
- Abrahám, R.; Majdan, R.; Drlička, R. Special tractor driving wheels with two modification of spikes inclination angle. Agron. Res. 2019, 17, 333–342. [Google Scholar] [CrossRef]
- Majdan, R.; Abrahám, R.; Tkáč, Z.; Mojžiš, M. Drawbar parameters of tractor with prototypes of driving wheels and standard tyres. Acta Technol. Agric. 2018, 21, 63–68. [Google Scholar] [CrossRef]
- Ferdous, J.; Soni, P.; Keen, A.; Gholkar, M.D. Performance evaluation of a small agricultural tractor on Bangkok clay soil. In Paper No. CSBE13-124, Proceedings of the CSBE/SCGAB 2013 Annual Conference, Montreal, QC, USA, 7–10 July 2013; University of Saskatchewan: Saskatoon, SK, Canada, 2013. [Google Scholar]
- Ferdous, J.; Soni, P.; Gholkar, M.D.; Keen, A. The rolling resistance and tractive performance of a small agricultural tractor with different surface and moisture conditions on Bangkok clay soil. In Proceedings of the 18th International Conference of the ISTVS 2014, Seoul, Republic of Korea, 22–25 September 2014. [Google Scholar]
- Rabbani, M.A.; Tsujimoto, T.; Mitsuoka, M.; Inoue, E.; Okayasu, T. Prediction of the vibration characteristics of half-track tractor considering a three-dimensional dynamic model. Biosyst. Eng. 2011, 110, 178–188. [Google Scholar] [CrossRef]
- Mattetti, M.; Varani, M.; Maraldi, M.; Paolini, F.; Fiorati, S.; Molari, G. Tractive performance of Trelleborg PneuTrac tyres. J. Agric. Eng. 2020, 51, 100–106. [Google Scholar] [CrossRef]
- Battiato, A.; Diserens, E.; Sartori, L. Traction performance simulation for mechanical front wheel drive tractors: Towards a practical computer tool. J. Agric. Eng. 2013, 44, 338–343. [Google Scholar] [CrossRef]
- Balsari, P.; Biglia, A.; Comba, L.; Sacco, D.; Alcatrão, L.E.; Varani, M.; Mattetti, M.; Barge, P.; Tortia, C.; Manzone, M.; et al. Performance analysis of a tractor—Power harrow system under different working conditions. Biosyst. Eng. 2021, 202, 28–41. [Google Scholar] [CrossRef]
- Kim, W.-S.; Kim, Y.-J.; Park, S.-U.; Kim, Y.-S. Influence of soil moisture content on the traction performance of a 78-kW agricultural tractor during plow tillage. Soil Tillage Res. 2021, 207, 104851. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. An extensive validation of computer simulation frameworks for neural prognostication of tractor tractive efficiency. Comput. Electron. Agric. 2018, 155, 283–297. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Weight, kg | Theoretical Force, N | Experimental Force, N | Difference, % |
|---|---|---|---|
| 20 | 196 | 196 | 0.20 |
| 41 | 402 | 403 | −0.23 |
| 55 | 540 | 538 | 0.38 |
| 63 | 618 | 618 | −0.02 |
| 73.5 | 721 | 722 | −0.11 |
| 82 | 804 | 802 | 0.25 |
| 94.5 | 927 | 927 | −0.02 |
| 104.5 | 1025 | 1021 | 0.38 |
| 119 | 1167 | 1169 | −0.15 |
| 126 | 1236 | 1232 | 0.29 |
| 233 | 2286 | 2275 | 0.48 |
| Parameter | Unit | Value |
|---|---|---|
| Gravel | % | 15.3 |
| Sand | % | 45.2 |
| Silt | % | 35.4 |
| Clay | % | 4.1 |
| Plastic limit | % | 24.6 |
| Liquid limit | % | 51.3 |
| Frictional angle | ° | 47.5 |
| Cohesion | kPa | 8.4 |
| Particle density | g m−3 | 2.6 |
| Gear | SMC | Driving Wheel Type | C1 | C2 | R2 | p-Value | RMSE |
|---|---|---|---|---|---|---|---|
| 1st | Low | Spikes in active position | 0.87 | 11.81 | 0.967 | <0.0001 | 429 |
| Spikes in inactive position | 0.79 | 9.88 | 0.973 | 408 | |||
| Tires without spikes | 0.73 | 9.21 | 0.948 | 494 | |||
| Medium | Spikes in active position | 0.63 | 11.68 | 0.957 | 401 | ||
| Spikes in inactive position | 0.59 | 11.09 | 0.965 | 364 | |||
| Tires without spikes | 0.61 | 10.18 | 0.944 | 448 | |||
| 3rd | Low | Spikes in active position | 0.81 | 12.81 | 0.962 | 448 | |
| Spikes in inactive position | 0.76 | 9.88 | 0.972 | 347 | |||
| Tires without spikes | 0.71 | 8.51 | 0.958 | 419 | |||
| Medium | Spikes in active position | 0.64 | 12.68 | 0.958 | 393 | ||
| Spikes in inactive position | 0.61 | 11.25 | 0.970 | 325 | |||
| Tires without spikes | 0.62 | 11.38 | 0.961 | 372 |
| Gear | SMC | Parameter/Specification | s, % | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 5 | 15 | 25 | 35 | 45 | 55 | ||||
| 1st | Low | DP, N | /Spikes in active position | 3987 | 7906 | 9110 | 9480 | 9594 | 9629 |
| /Tires without spikes | 2517 | 5870 | 7207 | 7739 | 7952 | 8036 | |||
| Δ, % | /Difference | 36.8 | 25.7 | 20.8 | 18.4 | 17.1 | 16.5 | ||
| Medium | DP, N | /Spikes in active position | 2400 | 5596 | 6591 | 6900 | 6996 | 7026 | |
| /Tires without spikes | 1663 | 4884 | 6048 | 6469 | 6621 | 6679 | |||
| Δ, % | /Difference | 30.7 | 12.7 | 7.5 | 6.2 | 5.3 | 4.9 | ||
| 3rd | Low | DP, N | /Spikes in active position | 3559 | 7474 | 8561 | 8863 | 8947 | 8970 |
| /Tires without spikes | 2119 | 5412 | 6820 | 7421 | 7679 | 7789 | |||
| Δ, % | /Difference | 40.5 | 27.5 | 20.3 | 16.2 | 14.2 | 13.2 | ||
| Medium | DP, N | /Spikes in active position | 2491 | 5933 | 6800 | 7020 | 7076 | 7090 | |
| /Tires without spikes | 1623 | 5153 | 6284 | 6647 | 6763 | 6799 | |||
| Δ, % | /Difference | 34.8 | 13.2 | 7.6 | 5.3 | 4.4 | 4.1 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abrahám, R.; Majdan, R.; Kollárová, K.; Tkáč, Z.; Matejková, E.; Masarovičová, S.; Drlička, R. Spike Device with Worm Gear Unit for Driving Wheels to Improve the Traction Performance of Compact Tractors on Grass Plots. Agriculture 2024, 14, 545. https://doi.org/10.3390/agriculture14040545
Abrahám R, Majdan R, Kollárová K, Tkáč Z, Matejková E, Masarovičová S, Drlička R. Spike Device with Worm Gear Unit for Driving Wheels to Improve the Traction Performance of Compact Tractors on Grass Plots. Agriculture. 2024; 14(4):545. https://doi.org/10.3390/agriculture14040545
Chicago/Turabian StyleAbrahám, Rudolf, Radoslav Majdan, Katarína Kollárová, Zdenko Tkáč, Eva Matejková, Soňa Masarovičová, and Róbert Drlička. 2024. "Spike Device with Worm Gear Unit for Driving Wheels to Improve the Traction Performance of Compact Tractors on Grass Plots" Agriculture 14, no. 4: 545. https://doi.org/10.3390/agriculture14040545
APA StyleAbrahám, R., Majdan, R., Kollárová, K., Tkáč, Z., Matejková, E., Masarovičová, S., & Drlička, R. (2024). Spike Device with Worm Gear Unit for Driving Wheels to Improve the Traction Performance of Compact Tractors on Grass Plots. Agriculture, 14(4), 545. https://doi.org/10.3390/agriculture14040545