

Development of a Modified Method for Measuring the Actual Draft Force Using a Tractor-Attached Dynamometer


Abstract
1. Introduction
2. Materials and Methods
2.1. Three-Point Hitch
2.2. Three-Point Hitch-Type Dynamometer
2.2.1. Specification of Load Cell and DAQ
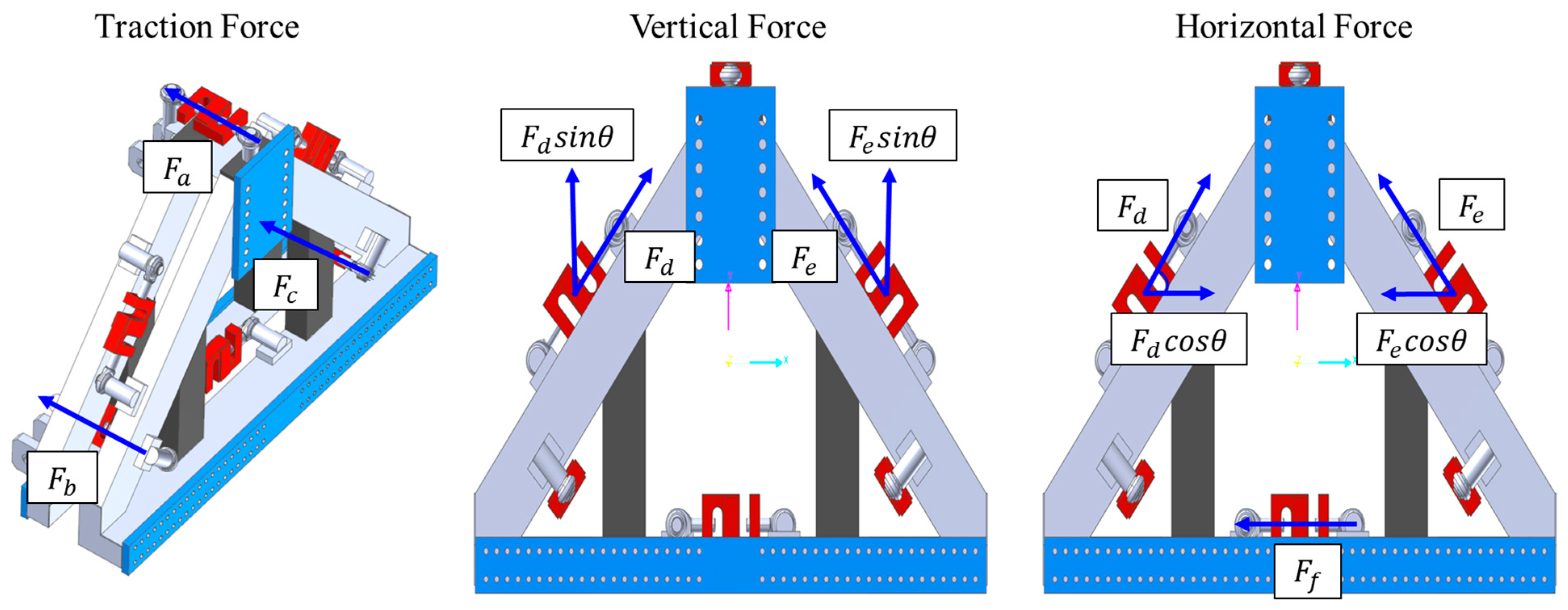
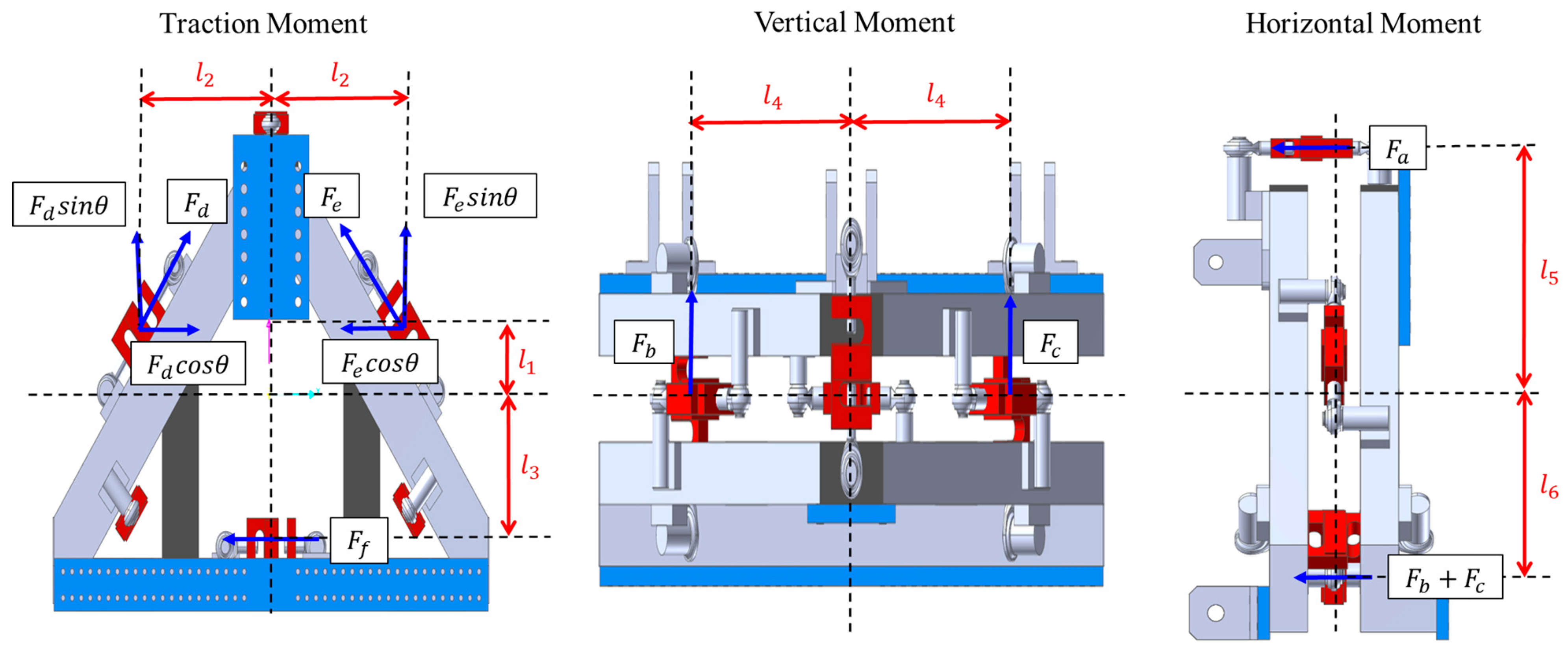
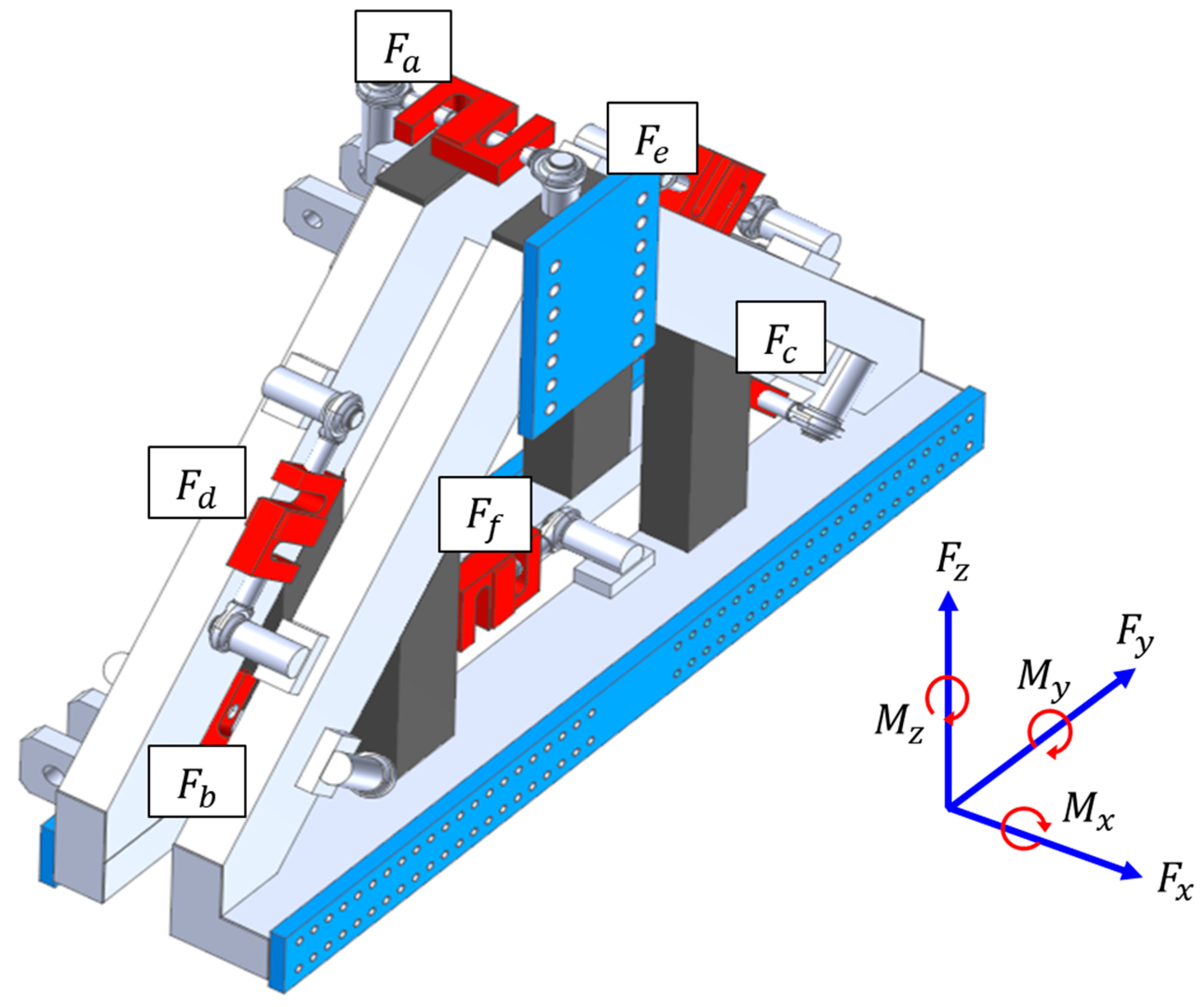
2.2.2. Dynamometer Component Force and Moment
2.3. Tractor and Implement
2.4. Test
3. Results and Discussion
3.1. Modified Equation
3.2. Result of the Static Load Test
3.3. Result of the Field Test
4. Conclusions
- (1)
- The force–moment equation was developed considering the geometrical position of the load cell constituting the dynamometer and, as a result of static load testing using a hydraulic actuator, confirmed more than 97% accuracy in all sections.
- (2)
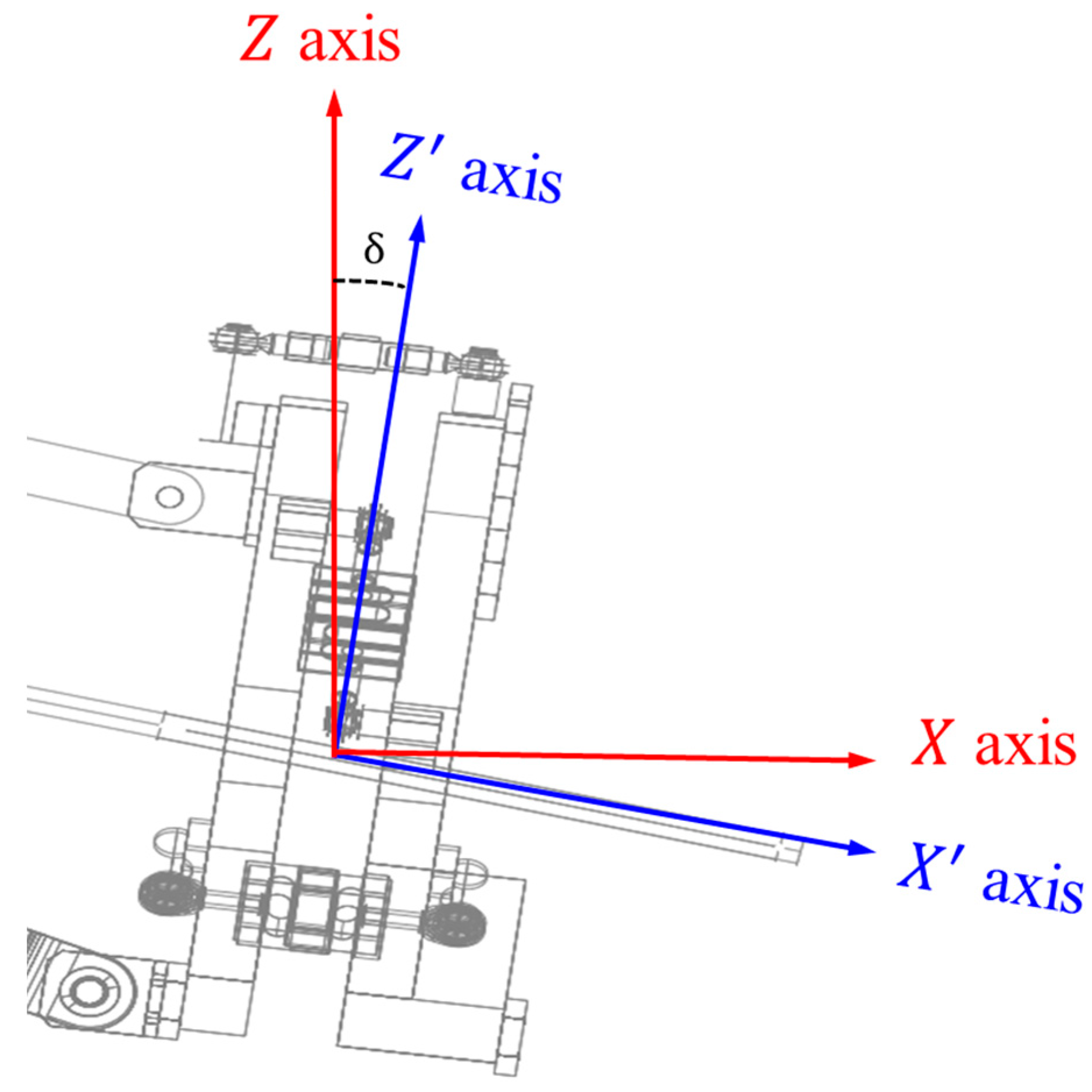
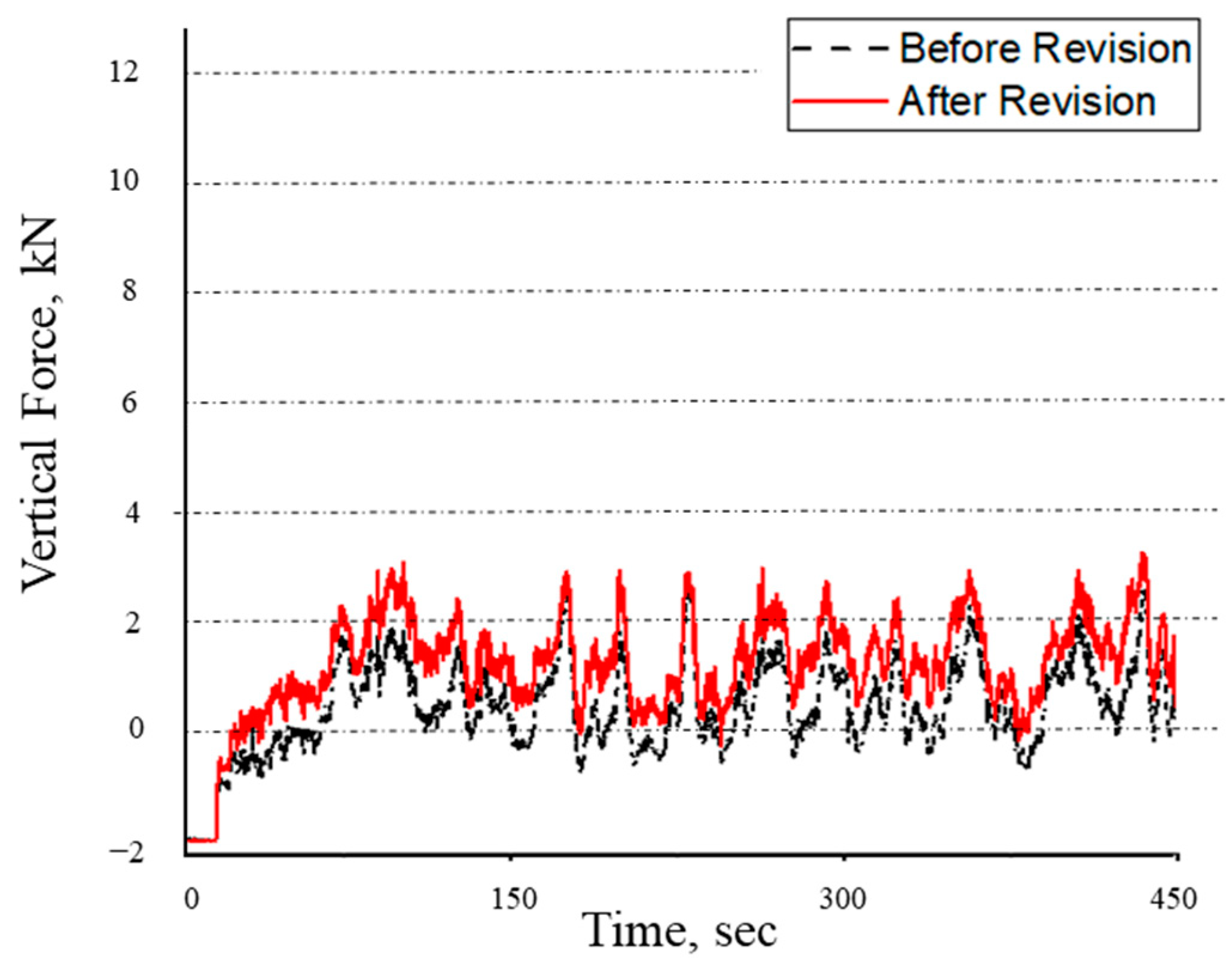
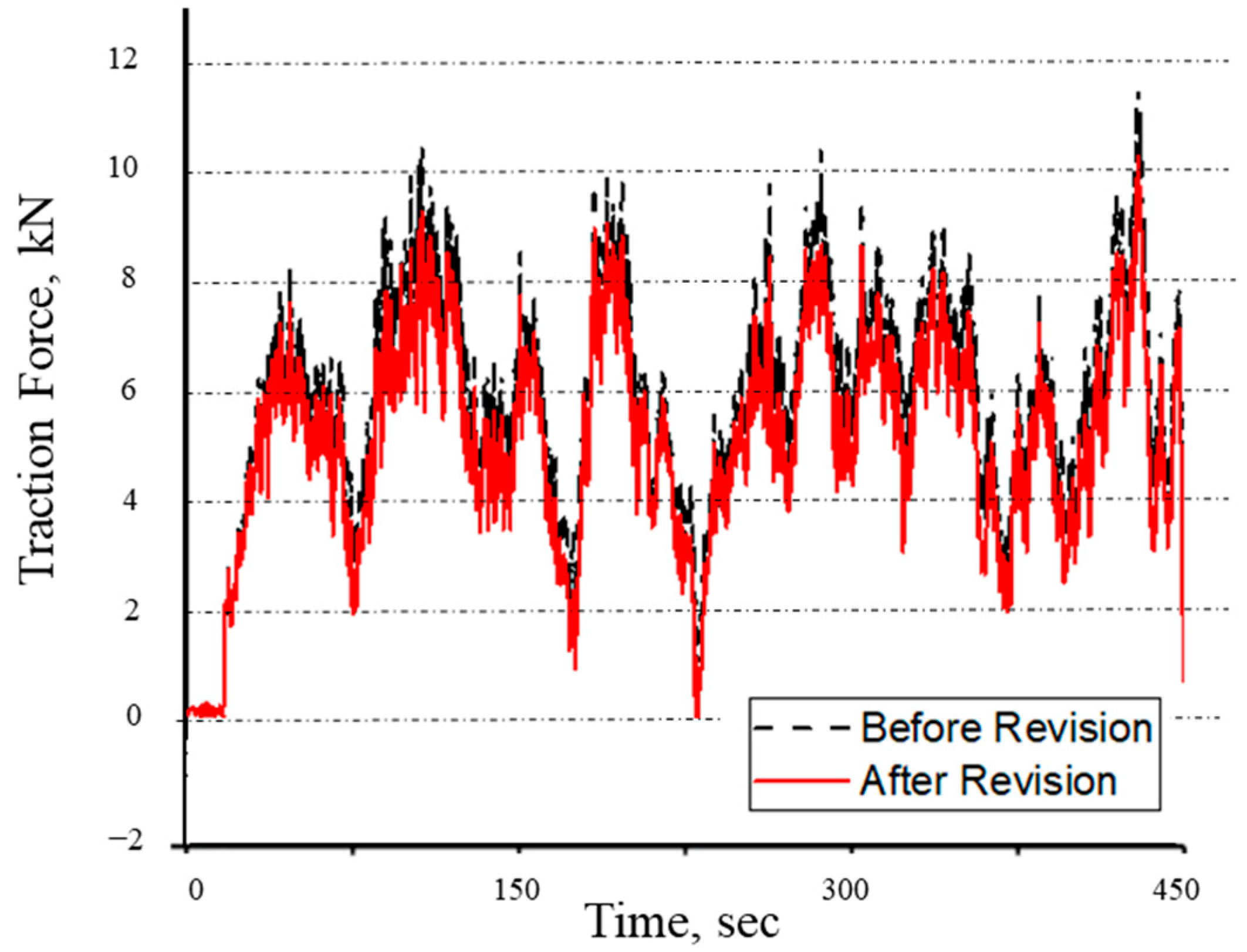
- The plow work data were collected in the field with a dynamometer and verified in a static environment. A modified equation based on transport pitch was used to modify the measured data. The actual traction force is slightly less than the measured traction force, and the actual vertical force is 11.7% greater than the measured vertical force. Because the dynamometer is a single-axis load cell, the correction data using the transport pitch are thought to be closer to the actual data.
- (3)
- Because traction is primarily used in plowing, a significant difference between the actual vertical force and the measured vertical force was confirmed because the traction force to be converted into vertical force was large. In contrast, in roller and landscape work, where vertical force is primarily used, the vertical force to be converted into the traction force is greater, so a significant difference between the actual traction force and the measured traction force is expected.
- (4)
- This study can be used as a basis for open-field smart farm research. The core of open-field smart farm technology is autonomous agricultural operation, and for this, it is most important to accurately analyze the traction force required for agricultural operation. The significance of this study is that it enabled precise traction analysis for autonomous agricultural operation. In addition, it is expected that further research will be needed, such as real-time traction analysis and traction force prediction for real-time autonomous agricultural operation.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Koo, Y.M. PTO Torque and draft analyses of an integrated tractor-mounted implement for round ridge preparation. J. Biosyst. Eng. 2022, 47, 330–343. [Google Scholar] [CrossRef]
- Beigi, M.; Ghazavi, M.A.; Ahmadi, I. Design and construction of load cell of a three point hitch dynamometer for tractor John Deere 3140. J. Mod. Process. Manufaturing Prod. 2014, 3, 47–58. [Google Scholar]
- Wismer, R.D.; Luth, H.J. Off-road traction prediction for wheel vehicles. Trans. ASAE 1974, 17, 8–14. [Google Scholar] [CrossRef]
- Alimardani, R.; Fazel, A.; Akram, A.; Mahmoudi, A.; Varnamkhsati, M.G. Design and Development of a three-point hitch dynamometer. J. Agric. Technol. 2008, 4, 37–52. [Google Scholar]
- Brixius, W.W. Traction Prediction Equations for Bias Ply Tires; Transaction of the ASAE, 87-1622; American Society of Agricultural Engineers: St. Joseph, MI, USA, 1987. [Google Scholar]
- Askari, M.; Komarizade, M.H.; Nikbakht, A.M.; Nobakht, N.; Teimourlou, R.F. A novel three-point hitch dynamometer to measure the draft requirement of mounted implements. Res. Agric. Eng. 2011, 57, 128–136. [Google Scholar] [CrossRef]
- Khan, J.; Godwin, R.J.; Kilgour, J.; Blackmore, B.S. Design and calibration of a direct mounted strain gauged lower links system for measurement of tractor-implement force. J. Eng. Appl. Sci. 2006, 1, 22–25. [Google Scholar]
- Roca, J.; Comellas, M.; Pijuan, J.; Nogués, M. Development of an easily adaptable three-point hitch dynamometer for agricultural tractors. Analysis of the disruptive effects on the measurements. J. Soil Tillage 2019, 194, 104323. [Google Scholar] [CrossRef]
- Al-Jalil, H.F.; Khdair, A.; Mukahal, W. Design and performance of and adjustable three-point hitch dynamometer. J. Soil Tillage 2001, 62, 153–156. [Google Scholar] [CrossRef]
- Kim, E.K.; Moon, S.G.; Oh, C.M.; Han, J.W. Working load measurement using 6-component load cell and fatigue damage analysis of composite working implement. J. Agric. Life Environ. Sci. 2017, 29, 225–236. [Google Scholar]
- Kostic, M.; Rakic, D.Z.; Licen, H.H.; Malinovic, N.C. Design and construction of three point hitch device for measuring draft of tillage implement—Data acquisition and post processing analysis. J. Food Agric. Environ. 2014, 12, 1300–1307. [Google Scholar]
- Kumari, A.; Raheman, H. Development of a Novel Draft Sensing Device with Lower Hitch Attachments for Tractor-Drawn Implements. J. Biosyst. Eng. 2024, 1–9. [Google Scholar] [CrossRef]
- Tewari, V.K.; Ravi, N.; Jha, K.R.; Ashok, A. Design and development of a three-Point-linkage dynamometer for tillage research. Agric. Eng. Today 2012, 36, 33–38. [Google Scholar]
- ASABE Standard S217; Three-Point Free-Link Attachment for Hitching Implements to Agricultural Wheel Tractors. American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2001.
- ISO Standard 730; Agricultural Wheeled Tractors—Rear-Mounted Three-Point Linkage—Part 1: Categories 1, 2, 3 and 4. ISO: Geneva, Switzerland, 2009.
- ISO Standard 11001-1; Agricultural Wheeled Tractors and Implements—Three-Point Hitch Couplers—Part 1: U-Frame Coupler. ISO: Geneva, Switzerland, 2016.
- ISO Standard 11001-2; Agricultural Wheeled Tractors and Implements—Three-Point Hitch Couplers—Part 2: A-Frame Coupler. ISO: Geneva, Switzerland, 2017.
- ISO Standard 11001-3; Agricultural Wheeled Tractors and Implements—Three-Point Hitch Couplers—Part 3: Link coupler. ISO: Geneva, Switzerland, 1993.
- ISO Standard 11001-4; Agricultural Wheeled Tractors and Implements—Three-Point Hitch Couplers—Part 4: Bar Coupler. ISO: Geneva, Switzerland, 1994.
- Bentaher, H.; Hamza, E.; Kantchev, G.; Maalej, A.; Arnold, W. Three-point hitch-mechanism instrumentation for tillage power optimization. In Proceedings of the 14th Annual Conference of the Misr Society of Agricultural Engineering; 2006; Volume 22, pp. 923–936. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=f470dc69970f41d2d6790174b64237c823e6ee35 (accessed on 14 March 2024).
- ISO Standard 5673-2; Agricultural Tractors and Machinery—Power Take-Off Drive Shafts and Power-Input Connection—Part 2: Specification for Use of PTO Drive Shafts, and Position and Clearance of PTO Drive Line and PIC for Various Attachments. ISO: Geneva, Switzerland, 2017.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Max capacity (kgf) | 2000 |
| Rated output (mV/V) | 3.0 ± 0.3 |
| Zoro balance (mV/V) | 0 ± 0.03 |
| Combined error (%) | 0.03 |
| Repeatability (%) | 0.01 |
| Recommended excitation (V) | 10 |
| Maximum excitation (V) | 15 |
| Specification | Value |
|---|---|
| Model Name | Q.Brixx A108 |
| Manufacturer | Gantner, Germany |
| Input Voltage (V) | Max 30 |
| Input Current (mA) | Max 0.5 |
| Upper Threshold (V) | >10 |
| Lower Threshold (V) | <2 |
| Analog Input Accuracy (%) | 0.01–0.05 |
| Repeatability (%) | 0.003 |
| Specification | Calculated Force (kN) | Input Force (kN) | Error Rate (%) |
|---|---|---|---|
| Traction Force | 14.709 | 14.551 | 1.1 |
| Vertical Force | 9.806 | 9.732 | 0.8 |
| Lateral Force | 4.903 | 5.032 | 2.6 |
| Specification | Calculated Moment (kN·m) | Input Moment (kN·m) | Error Rate (%) |
|---|---|---|---|
| Traction Moment | 3.912 | 3.983 | 1.8 |
| Vertical Moment | 3.912 | 3.807 | 2.7 |
| Lateral Moment | 2.535 | 2.619 | 3.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-G.; Lee, J.-W.; Kim, S.-C.; Oh, J.; Shim, S.-B. Development of a Modified Method for Measuring the Actual Draft Force Using a Tractor-Attached Dynamometer. Agriculture 2024, 14, 544. https://doi.org/10.3390/agriculture14040544
Kim H-G, Lee J-W, Kim S-C, Oh J, Shim S-B. Development of a Modified Method for Measuring the Actual Draft Force Using a Tractor-Attached Dynamometer. Agriculture. 2024; 14(4):544. https://doi.org/10.3390/agriculture14040544
Chicago/Turabian StyleKim, Hyo-Geol, Jin-Woong Lee, Su-Chul Kim, Jooseon Oh, and Sung-Bo Shim. 2024. "Development of a Modified Method for Measuring the Actual Draft Force Using a Tractor-Attached Dynamometer" Agriculture 14, no. 4: 544. https://doi.org/10.3390/agriculture14040544
APA StyleKim, H.-G., Lee, J.-W., Kim, S.-C., Oh, J., & Shim, S.-B. (2024). Development of a Modified Method for Measuring the Actual Draft Force Using a Tractor-Attached Dynamometer. Agriculture, 14(4), 544. https://doi.org/10.3390/agriculture14040544