
Design and Experiment of Dual-Row Seedling Pick-Up Device for High-Speed Automatic Transplanting Machine
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
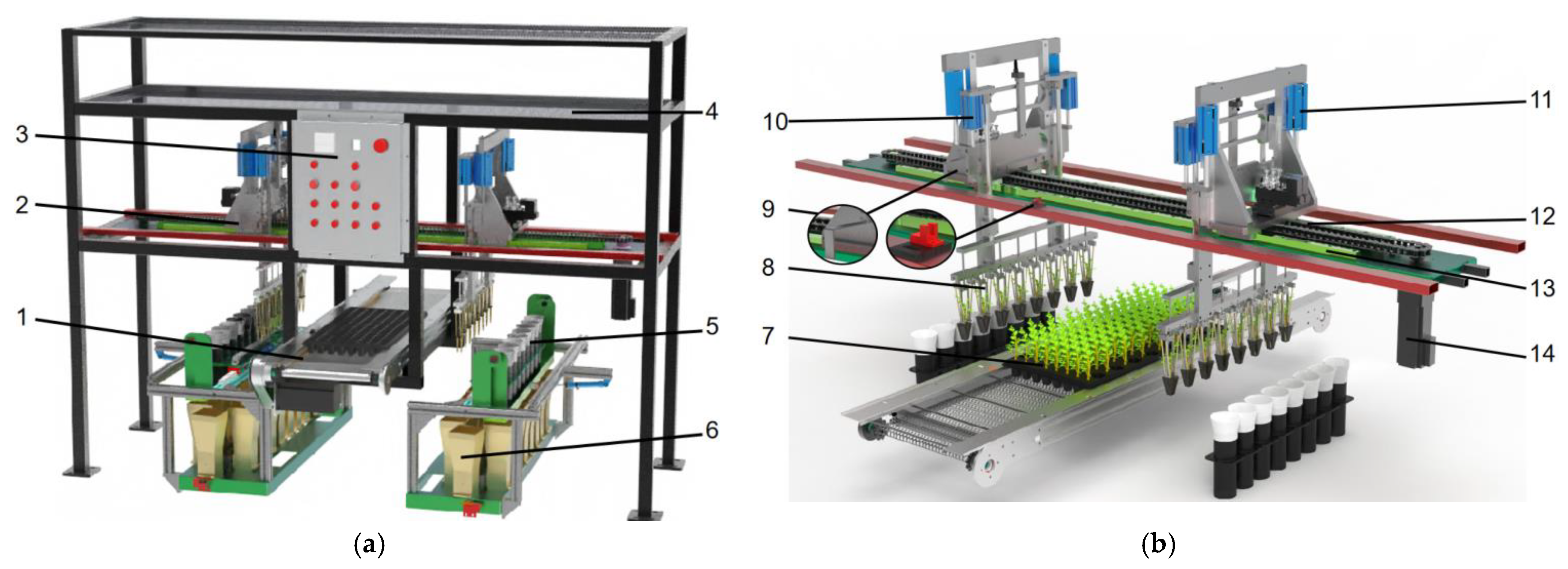
2.1. The Structure Composition of the Dual-Row Seedling Pick-Up Device
2.2. Working Principle
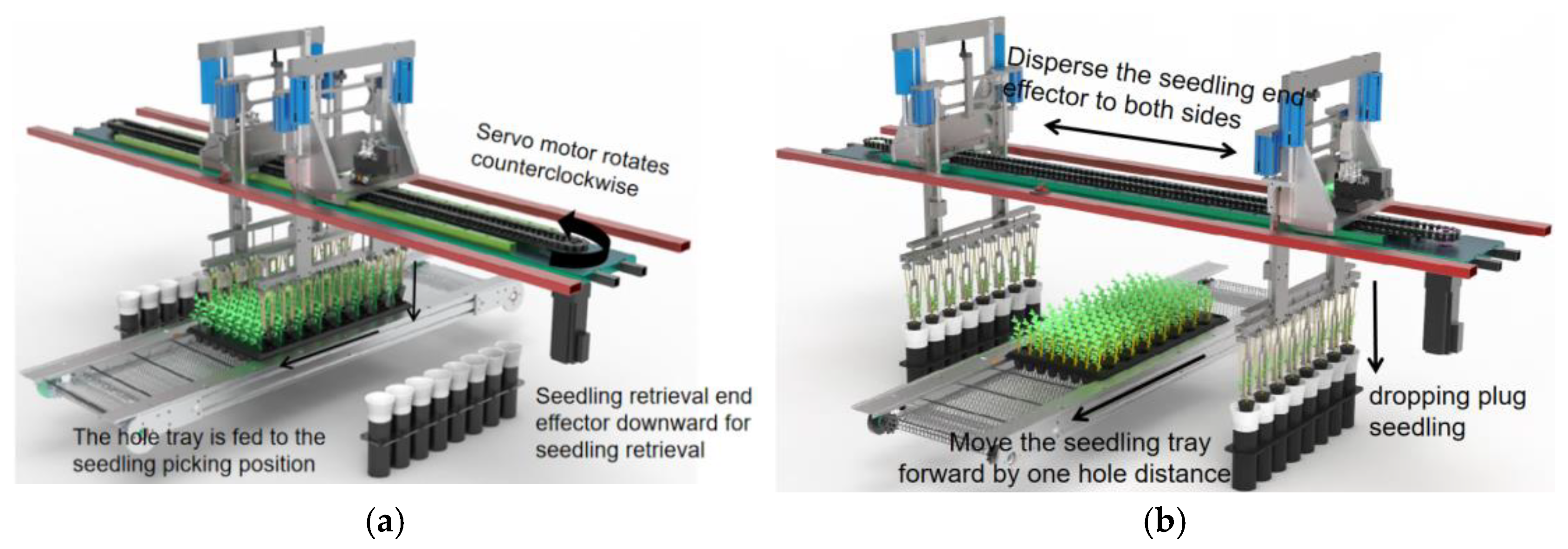
- (a)
- During work, the plug seedlings are placed on the seedling tray conveying device, and the seedling tray will be transported to the seedling picking position by the conveying motor. When the seedling tray reaches the picking position, the seedling pick-up end-effector will be driven by the servo motor to the middle and close above the picking point. The push rod of the lifting cylinder moves downward, and the picking needles will insert into the pot body driven by the push rod, and then the seedling pick-up end-effector will be driven by the lifting cylinder to remove the seedlings to the top of the seedling tray to complete the seedling pick-up action.
- (b)
- Afterwards, the servo motor rotates in reverse, and the end-effector of the seedling will disperse to both sides to reach the throwing point. The cylinder push rod drives the push seedling ring to move downward, and the pot seedling will be pushed down from the seedling pick-up needle to complete the seedling throwing action. Finally, under the drive of the motor, it returns to the seedling position for the next stage of seedling picking work. The position sensor provides an initial position mark for the end-effector, and after each row of seedlings is picked, the position of the end-effector will reposition based on its position signal, so as to avoid error accumulation and ensure the lateral positioning accuracy of the end-effector on the seedling tray.
3. Design of Key Components and Control System
3.1. The Design of the Seedling Pick-Up End-Effector
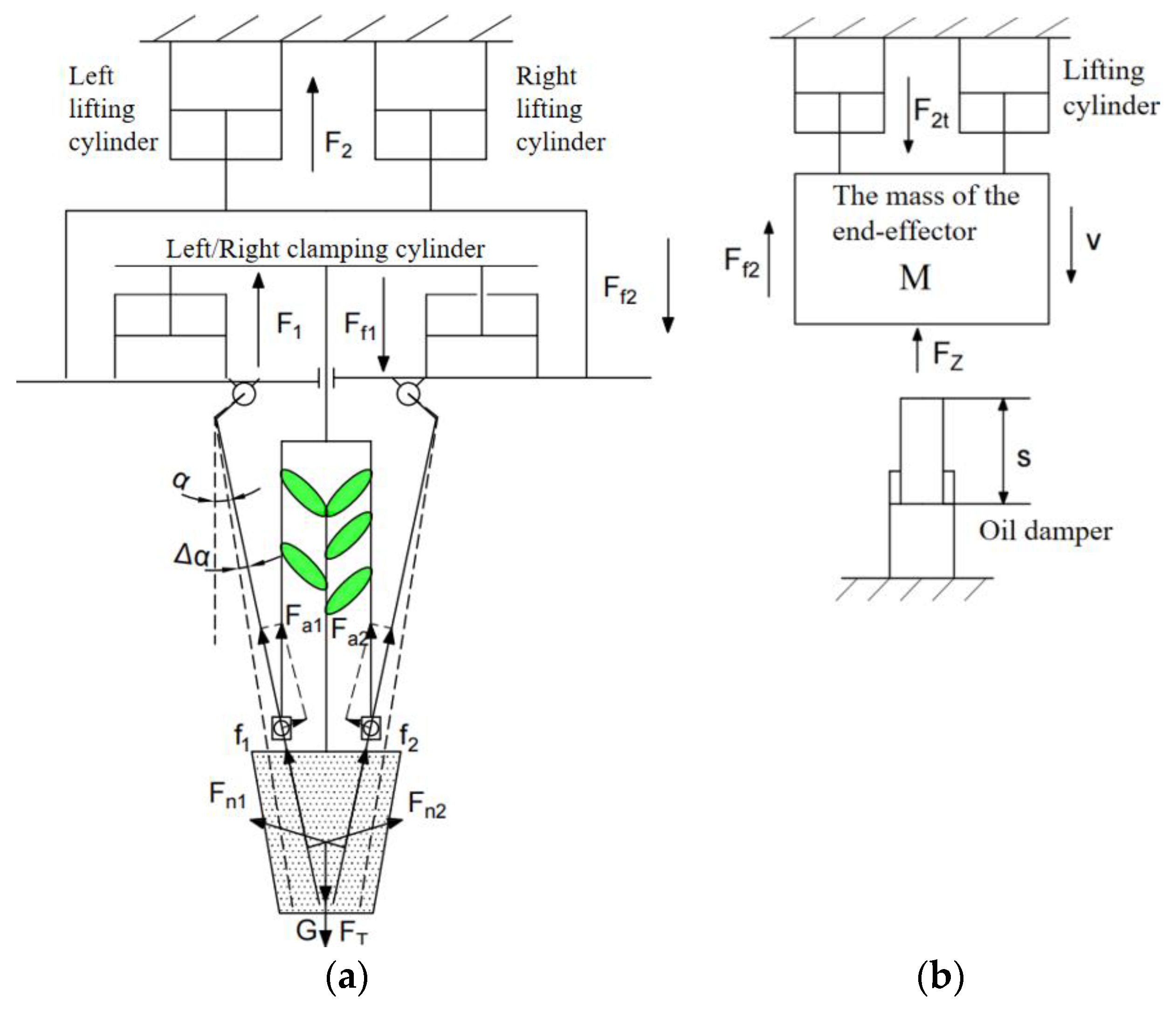
3.1.1. Design of Clamping and Picking Seedlings Action
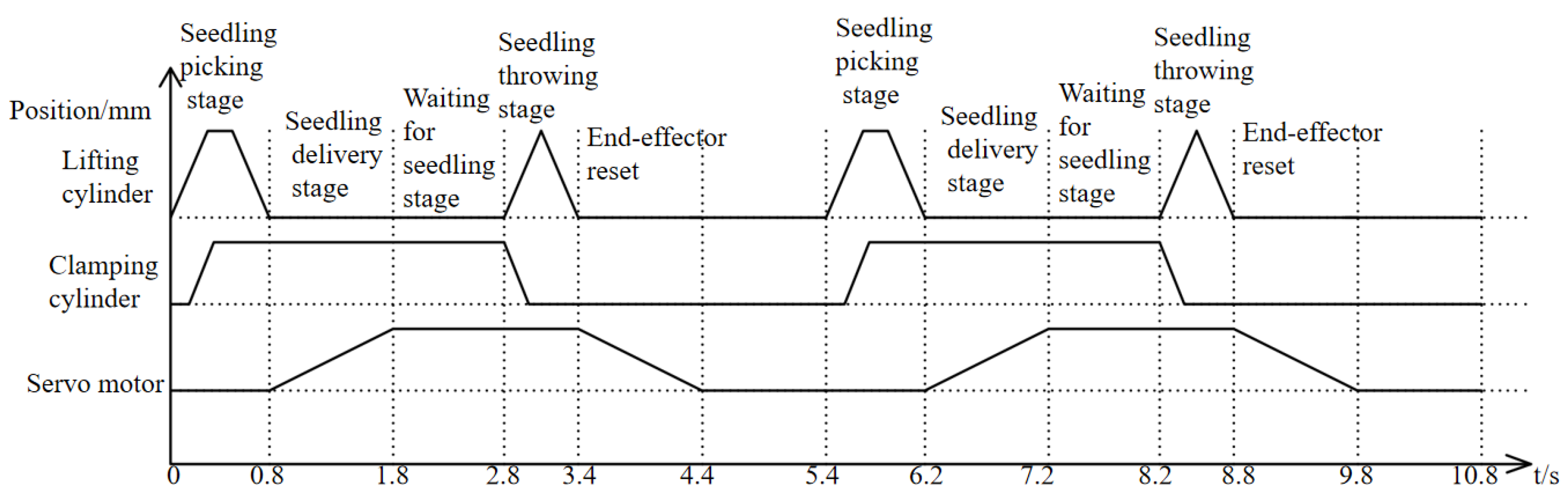
3.1.2. Design of Timing Control of Picking and Throwing Seedlings
3.1.3. Analysis and Selection of Cylinders
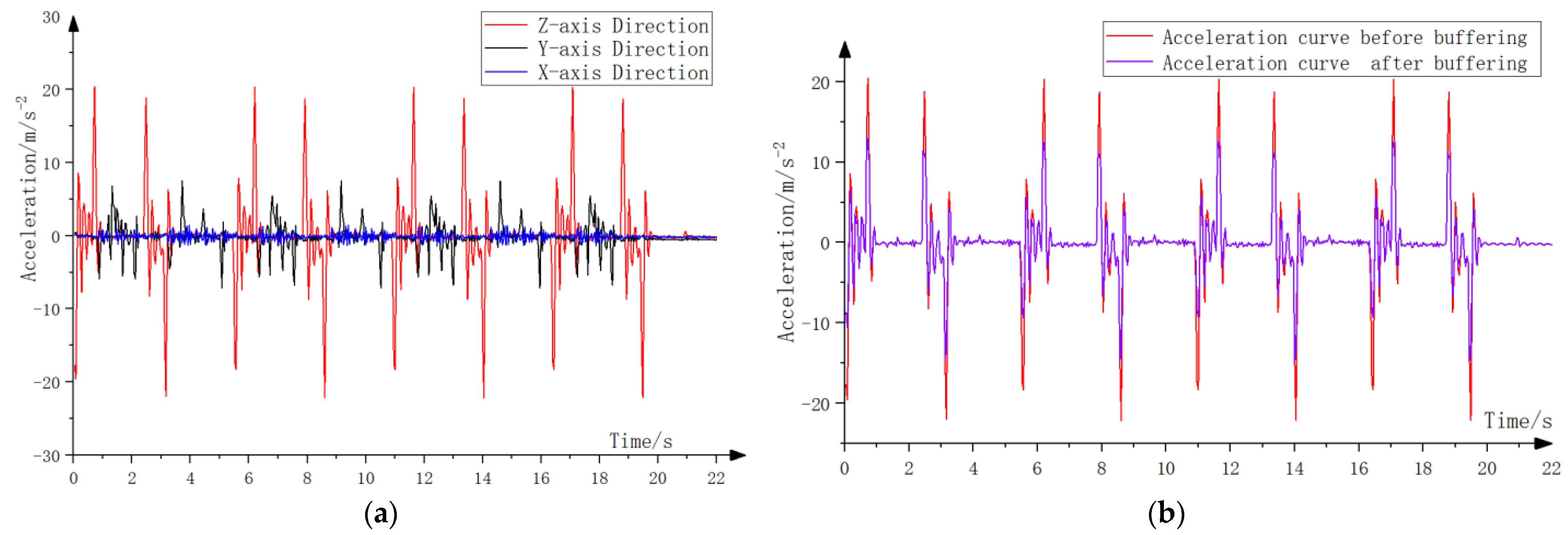
3.1.4. Analysis and Design of Buffers
3.2. Design of Control Systems
3.2.1. Design of Control System Hardware
3.2.2. Design of Control System Solution
3.2.3. Setting of Operating Parameters of Seedling Servo Motor
4. Experiments and Results
4.1. Experiment on Displacement Accuracy and Operation Stability of Seedling Picking and Throwing Mechanism
4.1.1. Design of Experimental Scheme
4.1.2. Experimental Results and Analysis
4.2. Performance Test of Seedling Picking
4.2.1. Experimental Design and Evaluation Criteria
4.2.2. Analysis of Test Results
5. Conclusions
- (1)
- The seedling pick-up device developed in this paper combines mechanical structure with automatic control principles. To reduce the damage of the mechanical end-effector to the pot seedlings and improve the reliability of seedling picking, a flexible pneumatic seedling pick-up end-effector was designed through the mechanical analysis of the end-effector and the pot body and the buffer optimization analysis of the end-effector, which can take 16 pot seedlings at one time. By coordinating the lifting cylinder and clamping cylinder, the seedling damage was effectively reduced, while the efficiency of seedling picking was improved. A row picking and throwing motion control system was designed based on the PLC, which monitored the picking and throwing process through various sensors, optimized the operation parameters of the servo motor, and achieved the goal of low-speed and efficient seedling picking.
- (2)
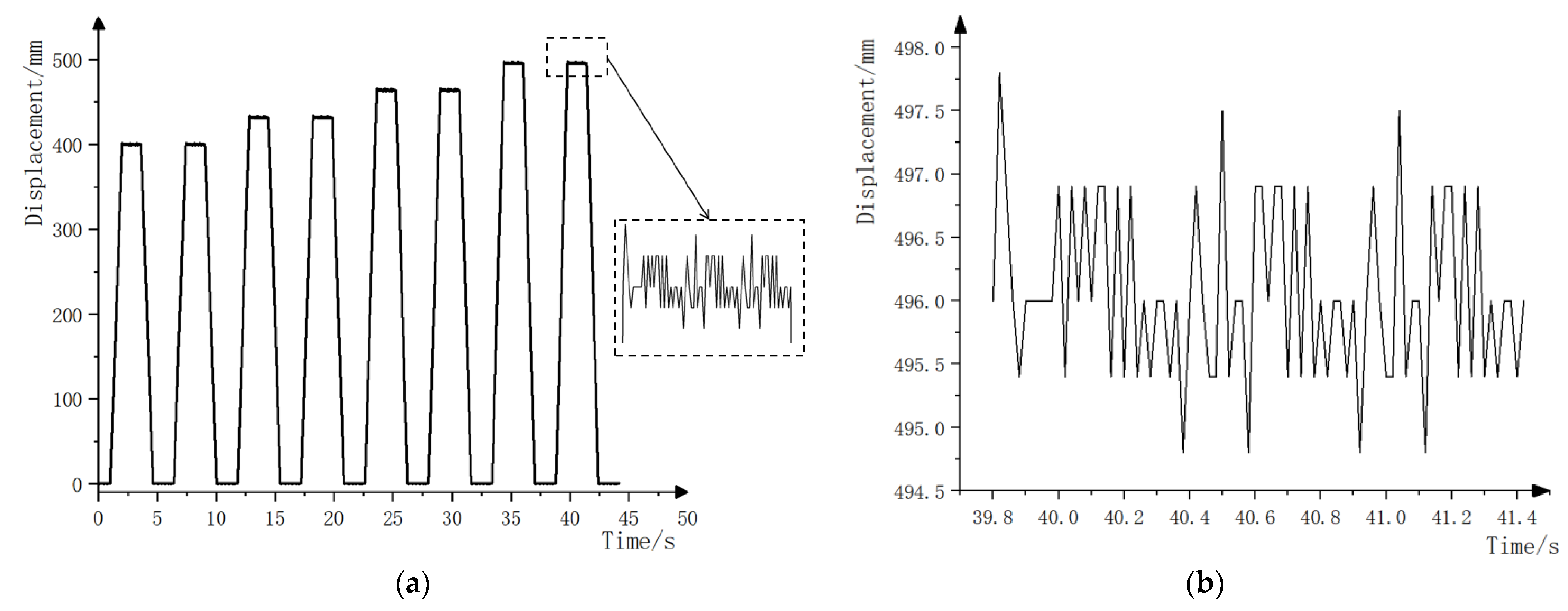
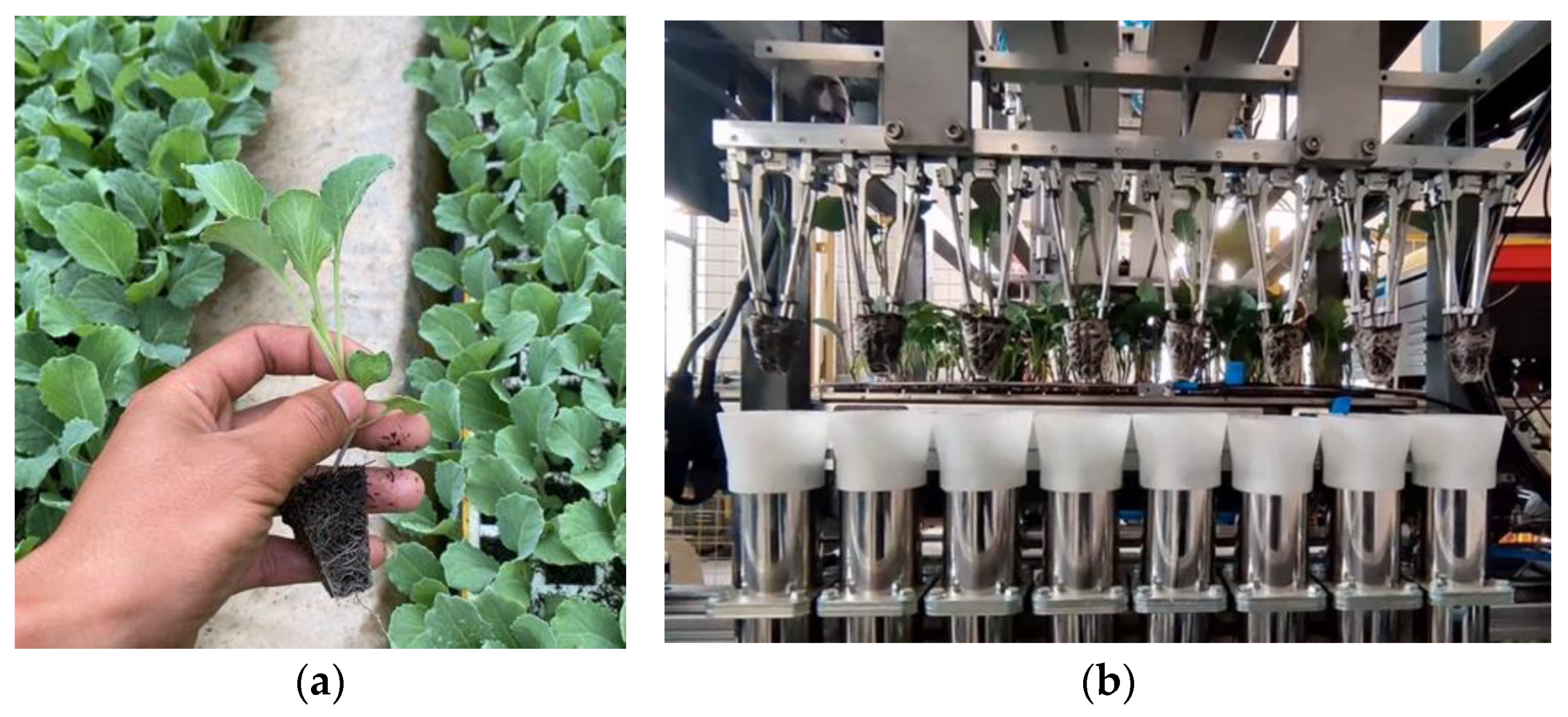
- In order to evaluate whether the positioning accuracy and operation stability of the seedling picking mechanism can meet the requirements of transplanting machine operation, a dynamic signal acquisition system and a linear displacement sensor were used to conduct positioning accuracy tests on the seedling displacement. The results showed that within the stroke of the seedling pick-up end-effector, the positioning error remained stable at 0.5–0.9 mm, which meets the requirements of transplanting positioning accuracy. Using 33-day-old cabbage plug seedlings as the test objects, seedling picking and throwing performance tests were conducted at an efficiency of 180 plants/min. The results showed that the comprehensive success rate of seedling picking and throwing was above 95%, with an average success rate of 97.3%. The designed automatic seedling picking and throwing system can effectively pick up seedlings from the plug tray. The coordination of the various components of the machine during operation is good, meeting the technical requirements of the fully automated mechanical transplanting of plug seedlings.
- (3)
- Certainly, the dual-row seedling pick-up mechanism proposed in this paper has certain limitations in practical applications. It can only be applied to the transplantation of 128-hole tray seedlings and cannot achieve dense transplantation in multiple rows. However, it possesses certain innovative structural features and the integration of electrical control methods, which carry valuable implications for future development. Compared to existing seedling extraction mechanisms, this mechanism can complete the transplantation of 16 bowl seedlings within one extraction cycle. While ensuring high-speed transplantation, it prolongs the seedling picking cycle, achieves low-speed operation, and reduces the impact damage of the seedling picking mechanism on the bowl body. Effectively solving the problems of the low efficiency of single end-effector seedling retrieval and the significant inertia impact of multiple end-effectors, it can provide reference for the research of high-speed fully automatic transplanting machines for hole tray seedlings.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jorg, O.J.; Sportelli, M.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Fantoni, G. Design, development and testing of feeding grippers for vegetable plug transplanters. AgriEngineering 2021, 3, 669–680. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Slaughter, D.C. Development of a precision 3-row synchronised transplanter. Biosyst. Eng. 2021, 206, 67–78. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, J.; Xu, Z.; Yuan, S.; Li, P.; Wang, J. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–19. [Google Scholar] [CrossRef]
- Yu, G.; Wang, L.; Sun, L.; Zhao, X.; Ye, B. Advancement of mechanized transplanting technology and equipments for field crops. Trans. Chin. Soc. Agric. Mach. 2022, 53, 1–20. [Google Scholar]
- Ji, J.; Cheng, Q.; Jin, X.; Zhang, Z.; Xie, X.; Li, M. Design and test of 2ZLX-2 transplanting machine for oil peony. International J. Agric. Biol. Eng. 2020, 13, 61–69. [Google Scholar] [CrossRef]
- Hu, Q.; Zhang, Q.; Li, X.; Wan, X.; Wang, L.; Liao, Q. Design and parameter analysis of seedling collection device of rapeseed substrate block seedlings transplanter machine. Trans. CSAE 2021, 37, 18–27. [Google Scholar]
- Park, S.-H.; Kim, J.-Y.; Choi, D.; Kim, C.; Kwak, T.; Cho, S. Development of walking type Chinese cabbage Transplanter. J. Biosyst. Eng. 2005, 30, 81–88. [Google Scholar] [CrossRef]
- Han, C.; Hu, X.; Zhang, J.; You, J.; Li, H. Design and testing of the mechanical picking function of a high-speed seedling auto-transplanter. Artif. Intell. Agric. 2021, 5, 64–71. [Google Scholar] [CrossRef]
- Zhou, M.; Wei, Z.; Wang, Z.; Sun, H.; Wang, G.; Yin, J. Design and Experimental Investigation of a Transplanting Mechanism for Super Rice Pot Seedlings. Agriculture 2023, 13, 1920. [Google Scholar] [CrossRef]
- Du, X.; Yun, Z.; Jin, X.; Li, P.; Gao, K. Design and Experiment of Automatic Adjustable Transplanting End-Effector Based on Double-Cam. Agriculture 2023, 13, 987. [Google Scholar] [CrossRef]
- Jun, W.; Haiyang, Z.; Xin, J.; Jiangtao, J.; Song, G. Design and experiment of seedling bowl clamping force detection system for plug seedling automatic transplanter. Trans. Chin. Soc. Agric. Mach. 2019, 50, 79–87. [Google Scholar]
- Xin, J.; Hongbin, S.; Hengyi, Z.; Jiangtao, J.; Bo, Z.; Cheng, L. Development and Experiment of Integrated Vegetable Pot Seedling Picking Jaw Clamping Force Detection Sensor. Trans. Chin. Soc. Agric. Mach. 2023, 54, 175–183. [Google Scholar]
- Zhao, S.; Liu, J.; Jin, Y.; Bai, Z.; Liu, J.; Zhou, X. Design and Testing of an Intelligent Multi-Functional Seedling Transplanting System. Agronomy 2022, 12, 2683. [Google Scholar] [CrossRef]
- Han, L.; Mao, H.; Hu, J.; Tian, K. Development of a doorframe-typed swinging seedling pick-up device for automatic field transplantation. Span. J. Agric. Res. 2015, 13, e0210. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.; Ma, H.; Ji, J.; Zhao, K.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef]
- Li, H.; Cao, W.; Li, S.; Liu, J.; Chen, B.; Ma, X. Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable. Trans. Chin. Soc. Agric. Eng. 2017, 33, 23–33. [Google Scholar]
- Ye, B.; Zeng, G.; Deng, B.; Yang, C.; Liu, J.; Yu, G. Design and tests of a rotary plug seedling pick-up mechanism for vegetable automatic transplanter. Int. J. Agric. Biol. Eng. 2020, 13, 70–78. [Google Scholar] [CrossRef]
- Yu, G.; Jin, Y.; Chang, S.; Ye, B.; Gu, J.; Zhao, X. Design and test of clipping-plug type transplanting mechanism of rice plug-seedling. Trans. Chin. Soc. Agric. Mach. 2019, 50, 100–108. [Google Scholar]
- Wang, M.; Song, J.; Liu, C.; Wang, Y.; Sun, Y. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 49–57. [Google Scholar]
- Yu, G.; Wang, X.; Liu, J.G.; Ye, B.L.; Li, X.; Zhao, X. Design and Experiment of Multi Row Seedling Taking Mechanism for Dense Planting and Transplanting of Vegetable Pot Peedlings. Trans. Chin. Soc. Agric. Mach. 2023, 54, 94–103. [Google Scholar]
- Xie, S.; Yang, S.; Liu, J. Development of the seedling taking and throwing device with oblique insertion and plug clipping for vegetable transplanters. Trans. CSAE 2020, 36, 1–10. [Google Scholar]
- Dang, Y.; Jin, X.; Li, H.; Wang, J.; Lu, Y.; Ding, B. Design of single-degree-of-freedom four-bar seedling-taking and throwing manipulator. Trans. CSAE 2019, 35, 39–47. [Google Scholar]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
- Ma, G.; Mao, H.; Han, L.; Liu, Y.; Gao, F. Reciprocating mechanism for whole row automatic seedling picking and dropping on a transplanter. Appl. Eng. Agric. 2020, 36, 751–766. [Google Scholar] [CrossRef]
- Han, C.; Xiao, L.; Xu, Y.; Zhang, J.; Li, H. Design and experiment of the automatic transplanter for chili plug seedlings. Trans. CSAE 2021, 37, 20–29. [Google Scholar]
- Wei, X.; Bao, S.; Liu, X.; Liu, C.; Mao, H. Design and experiment on potted-seedling automatic transplanter control system for motion coordinating. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–7. [Google Scholar]
- Han, L.; Xiang, D.; Xu, Q.; Du, X.; Ma, G.; Mao, H. Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials. Appl. Sci. 2023, 13, 10022. [Google Scholar] [CrossRef]
- Hou, J.; Zhang, E.; Zhang, K.; Li, Y. Optimization Design and Test of Seedling Picking and Throwing Device of Plug Seeding Transplanter Based on DEM-MFBD. Trans. Chin. Soc. Agric. Mach. 2023, 54, 46–57. [Google Scholar]
- Yue, R.; Hu, J.; Liu, Y.; Yao, M.; Zhang, T.; Shi, J. Design and Working Parameter Optimization of Pneumatic Reciprocating Seedling-Picking Device of Automatic Transplanter. Agriculture 2022, 12, 1989. [Google Scholar] [CrossRef]
- Fang, Y.; Chen, Y.; Zhang, Y.; Dai, J. Simulation analysis on damping and impact characteristics of hydrau- lic buffer. Sci. Technol. Eng. 2020, 20, 7820–7825. [Google Scholar]
- Ren, L.; Wang, N.; Cao, W.; Li, J.; Ye, X. Fuzzy PID control of manipulator positioning for taking the whole row seedlings of tomato plug seedlings. Trans. CSAE 2020, 36, 21–30. [Google Scholar]
- Chao, W.; Yonglei, L.; Jiannong, S.; Ronghua, M.; Cailing, L.; Fanglin, L. Design and Test of Automatic Control System of Pneumatic Ejecting Type High-Speed Transplanter. Trans. Chin. Soc. Agric. Mach. 2022, 53, 114–125. [Google Scholar]
- Wu, J.; Yan, H.; Jin, X.; Guo, Y.; Chen, K.; Dong, Z. Research on disk conveying device and positioning control system for transplanter. Trans. Chin. Soc. Agric. Mach. 2013, 44, 14–18. [Google Scholar]
- JB/T 10291-2013; China Machinery Industry Federation, Dryland Planting Machinery. National Technical Committee on Agricultural Machinery of Standardization Administration. AMST: Beijing, China, 2013.
- Wen, Y.; Zhang, J.; Tian, J.; Duan, D.; Zhang, Y.; Tan, Y.; Yuan, T.; Li, X. Design of a traction double-row fully automatic transplanter for vegetable plug seedlings. Comput. Electron. Agric. 2021, 182, 106017. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Components | Type | Stroke/mm | Air Pressure/MPa | Manufacturer |
|---|---|---|---|---|
| Lifting cylinder | SDA32×70S | 70 | 0.3 | AirTAC (Taipei, Taiwan) |
| Clamping cylinder | SDA25×50S | 50 | 0.3 | AirTAC (Taipei, Taiwan) |
| Hydraulic buffer | ACA1210 | 10 | / | AirTAC (Taipei, Taiwan) |
| Instrument Name | Type | Main Technical Features | Manufacturer |
|---|---|---|---|
| Linear displacement sensor | KTC-500 mm | Linear accuracy: ±0.05%, maximum operating speed: 10 m/s; maximum range: 600 mm | Shenzhen SongYan Seiko Technology Co., Ltd., Shenzhen, China |
| Transmitter module | BZ2204A | Output signal mode: 0.5 V, stabilize the working voltage of 12–24 V to 5 V voltage signal, and output the voltage signal | Shenzhen SongYan Seiko Technology Co., Ltd., Shenzhen, China |
| Data collection and analysis system | BZ7201 | USB interface data acquisition instrument, resolution: 16 bits, maximum sampling frequency: 200 kHz | Beidaihe Land Technology Co., Ltd., Qinhuangdao, China |
| Triaxial accelerometer | 1A340E | Sensitivity: 1 mV/m·s−2; frequency: 2–10,000 Hz | Jiangsu Donghua Testing Technology Co., Ltd., Taizhou, China |
| Dynamic signal acquisition system | DH5902 | Continuous sampling frequency: 32-channel synchronous acquisition, up to 256 KHz/channel | Jiangsu Donghua Testing Technology Co., Ltd., Taizhou, China |
| Number | /100% | /100% | /100% | /100% | |||
|---|---|---|---|---|---|---|---|
| 1 | 124 | 96.9 | 1 | 0.8 | 124 | 100 | 96.1 |
| 2 | 125 | 97.7 | 0 | 0 | 124 | 99.2 | 96.9 |
| 3 | 126 | 98.4 | 0 | 0 | 126 | 100 | 98.4 |
| 4 | 123 | 96.1 | 0 | 0 | 123 | 100 | 96.1 |
| 5 | 125 | 97.7 | 0 | 0 | 124 | 100 | 97.7 |
| 6 | 126 | 98.4 | 1 | 0.8 | 126 | 100 | 97.7 |
| 7 | 128 | 100 | 2 | 1.6 | 126 | 99.2 | 97.6 |
| 8 | 126 | 98.4 | 0 | 0 | 125 | 99.2 | 97.7 |
| Average | 97.9 | 0.4 | 99.7 | 97.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, R.; Yao, M.; Zhang, T.; Shi, J.; Zhou, J.; Hu, J. Design and Experiment of Dual-Row Seedling Pick-Up Device for High-Speed Automatic Transplanting Machine. Agriculture 2024, 14, 942. https://doi.org/10.3390/agriculture14060942
Yue R, Yao M, Zhang T, Shi J, Zhou J, Hu J. Design and Experiment of Dual-Row Seedling Pick-Up Device for High-Speed Automatic Transplanting Machine. Agriculture. 2024; 14(6):942. https://doi.org/10.3390/agriculture14060942
Chicago/Turabian StyleYue, Rencai, Mengjiao Yao, Tengfei Zhang, Jiawei Shi, Jinhao Zhou, and Jianping Hu. 2024. "Design and Experiment of Dual-Row Seedling Pick-Up Device for High-Speed Automatic Transplanting Machine" Agriculture 14, no. 6: 942. https://doi.org/10.3390/agriculture14060942