Abstract
Adaptability to unstructured objects and the avoidance of target damage are critical challenges for flexible grippers in fruit-picking robots. Most existing flexible grippers have many problems in terms of control complexity, stability and cost. This paper proposes a flexible finger design method that considers contact behavior. The new approach incorporates topological design of contact targets and introduces contact stress constraints to directly obtain a flexible finger structure with low contact stress and good adaptability. The study explores the effects of design parameters, including virtual spring stiffness, volume fraction, design domain size, and discretization, on the outcomes of the flexible finger topology optimization. Two flexible finger structures were selected for comparative analysis. The experimental results verified the effectiveness of the design method and the maximum contact stress was reduced by about 70%. An adaptive two-finger gripper was developed. This design allows the gripper to achieve damage-free grasping without additional sensors and control systems. The adaptive and contact performances of the grippers with different driving modes were analyzed. Practical grasping tests were also performed, including evaluation of adaptive performance, stability, and maximum grasping weight. The results indicate that gripper 2 with flexible finger 2 excelled in contact stress and adaptive wrapping, making it well-suited for grasping unstructured and fragile objects. This paper provides valuable insights for the design and application of flexible grippers for picking robots, offering a promising solution to enhance adaptability while minimizing target damage.
1. Introduction
Agricultural robots are developing rapidly [1,2]. The related technologies are being widely used in apples [3], cherry tomatoes [4,5], bananas [6], cucumbers [7] and other fruits and vegetables [8,9] during the production process. Robotic grippers are one of the most crucial components of robot manipulators. Adaptive flexible grippers can not only grasp fragile and unstructured objects, but also interact safely with humans and environments. These advantages make adaptive flexible grippers have great potential in the fruit picking [10].
For example, Chen et al. used a compliant structure gripper with fin effect [11] to develop a robotic apple harvesting system, which can realize adaptive picking of apples with a picking success rate of 62.8% [12]. They then designed a flexible tapered finger and, based on this, developed a soft gripper, increasing the picking success rate to 70.77% [13]. Inspired by duck feet and octopus tentacles, Cai et al. [14] proposed a pneumatically webbed soft gripper, which added four webs to the four pneumatically flexible fingers. This flexible gripper can grasp multiple targets at once while preventing them from falling out of the fingers. Cao et al. [15] reduced the control complexity by reducing the number of fingers, using three flexible fingers and a bellows actuator to achieve flexible grasping of fruits. Although these flexible grippers are more adaptive than traditional rigid manipulators, these flexible grippers do not consider the contact force conditions during the grasping process. In reality, the use of flexible grippers still does not guarantee damage-free handling of fruits if the contact force is not thoroughly considered [16,17].
Most existing research utilizes tactile sensors or smart materials in flexible fingers or fingertips to measure grasping force, enabling accurate real-time control of the gripper [18]. These sensors are predominantly based on force-sensitive resistors or resistive foil strain gauges, and typically comprise flexible thin films and electrodes [19,20]. Elfferich et al. [17] actively control flexible harvesting of blackberries by integrating force sensors into flexible fingertips. While these sensor-based force detection techniques are straightforward, they do come with certain constraints. Firstly, the bulkiness and significant weight of many conventional force sensors pose substantial challenges to their integration with grippers. For instance, organizing the sensor wiring can be particularly cumbersome, especially with a large number of sensors. Additionally, embedding or attaching external sensors may alter the stiffness and flexibility of soft grippers [21]. Secondly, these intricate sensors are often highly sensitive to environmental factors, and necessitate stringent conditions regarding temperature, humidity, cleanliness, and corrosion resistance. Consequently, these requirements lead to numerous issues in terms of reliability, stability, and cost, which limiting the application of grippers in unstructured environments.
In addition to directly combining sensors to measure force, indirect force estimation technology that utilizes the compliance of soft robots is also a common method [22,23]. The core concept of these methods involves modeling the correlation between deformations and forces, tracking the robots’ deformations, and ultimately calculating the contact forces. Thus, the challenge of force sensing can be transformed into a matter of static modeling and deformation measurement [21]. For example, Zhang et al. [24] controlled apple harvesting by establishing a grasping force sensing model of force and finger-bending angle. Ji et al. [25] proposed a variable damping impedance control strategy, which made the gripping force tracking effect smoother and improved the dynamic performance. The flexible gripper designed by Lin et al. [26] uses visual perception technology to realize tactile perception and control contact force. Visentin et al. [27] reduced cameras and designed a hemispherical soft dome gripper. Force estimation was performed by visually identifying different deformations of the pattern on the hemispherical soft dome. However, the large-sized targets can easily affect the recognition accuracy.
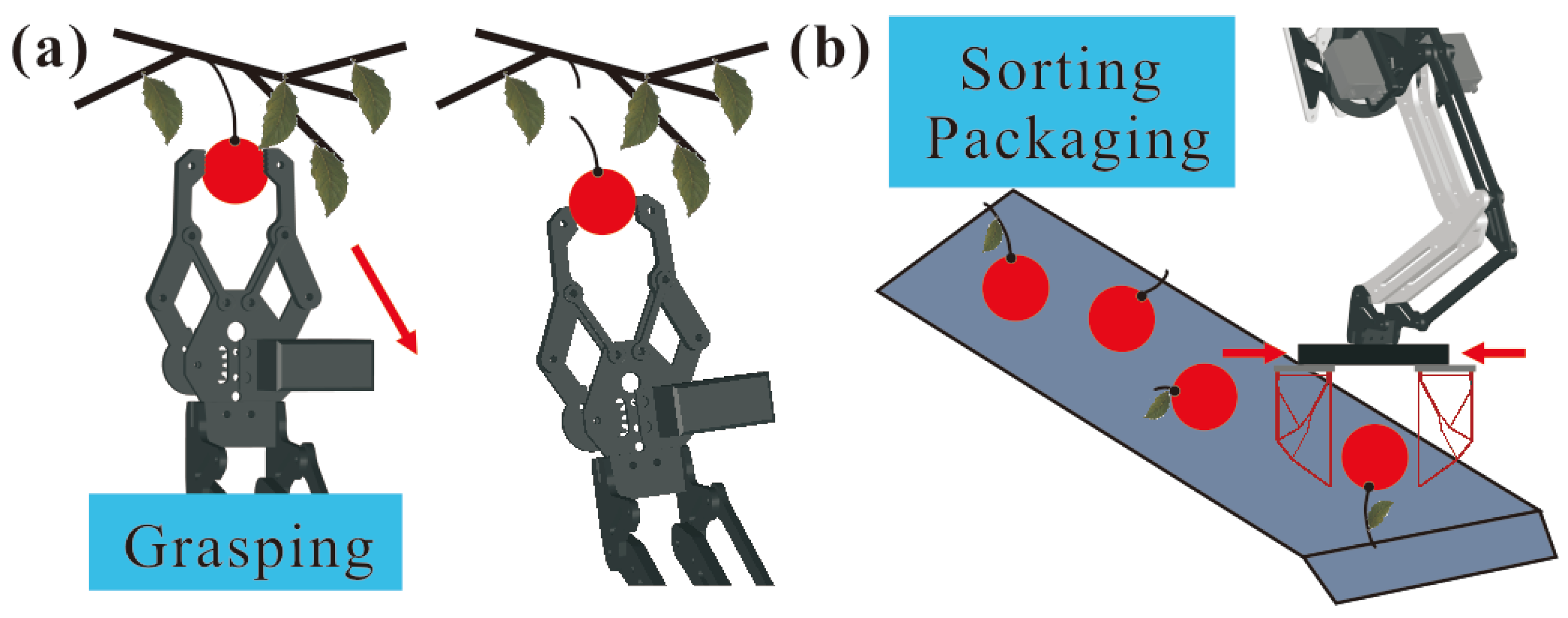
In general, the current flexible grippers of fruit-picking robots mainly use sensors, smart materials and force models to reduce the redundant grasping force. However, these methods can lead to issues such as complex control, long response times and high manufacturing costs. If a gripper can achieve both adaptivity and low contact stress solely through its unique topology structure, without relying on sensors or other complex technologies, the fruit grasping operations can be greatly simplified and made more cost-effective. This is important for agricultural production. For example, it is used in fruit-picking robots and automated fruit sorting and packaging, as shown in Figure 1.
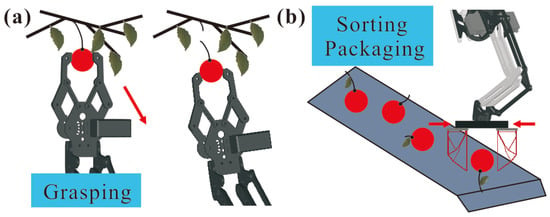
Figure 1.
High-performancefruit grasping tasks: (a) fruit picking, (b) fruit sorting and packaging.
However, another important issue is how to design the above-mentioned flexible adaptive grippers considering contact stress. Existing designs of flexible grippers lack clear design standards and comprehensive design methods. By taking cues from bionics, origami techniques [28,29] or drawing inspirations from the inherent characteristics of their grasping targets, various grippers have been developed, e.g., the bionic soft grippers inspired by animals [30,31] or plants [32,33]. However, current designs are highly dependent on anthropogenic factors, such as the designers’ experience, professional knowledge, and inspiration. The design of flexible grippers remains a challenging task.
Topology optimization is an effective approach for addressing the conceptual design challenges of structures [34], compliant mechanisms [35,36], soft grippers [37,38], soft robots [39], etc. This approach can automatically generate the topology, shape and size of the flexible grippers based on predefined design requirements [40,41], which is friendly for designers without extensive professional experience. Therefore, topology optimization and generative design have gradually become the main design methods for flexible grippers [42,43]. For example, Liu et al. [44] successfully developed flexible grippers with high mechanical advantage, including two-finger flexible grippers [45] and three-finger soft grippers [46,47]. In addition, they also adopted a topological method with two output ports that were in opposite directions to design multi-material flexible fingers [37]. Based on the single input and double outputs strategies, Huang et al. [48] introduced an actual contact target to design the flexible finger advantages with better performance in contact force. There are currently few studies on topology optimization of flexible fingers considering target contact stress.
This paper proposes a topology design method for flexible grippers that considers contact behavior. The design results can be directly applied to the lossless flexible gripper of fruit-picking robots. Unlike the previous solutions, our method can avoid complex and expensive sensing control systems and solve the problem of damage to targets by picking robots in terms of structural design. The contributions of this paper mainly include two aspects:
- (1)
- Establishing a flexible gripper topology design method that considers contact behavior, and analyzing the impact of topology design parameters on the design process and final results.
- (2)
- An adaptive finger structure with low contact stress is presented. This structure has superior performance (adaptability and contact performance) and versatility in applications. Based on the above-mentioned fingers, flexible grippers with different driving methods were designed. This gripper can be used in fruit grasping tasks to avoid fruit damage, such as fruit picking, sorting and packaging, etc.
The rest of this paper is as follows: In Section 2, a flexible finger topology design model considering contact behavior is established, and the influence of design parameters on the results are analyzed. In Section 3, the effectiveness of the proposed computer-aided design method is verified through FEA and experiments. The grippers with different drives are introduced, and their performance testing and analysis are carried out. The performance and characteristics during gripper gripping are compared and discussed. In Section 4, conclusions are drawn and the research results are summarized.
2. Flexible Finger Topology Optimization with Contact Constraints
This section introduces a novel strategy for flexible finger design considering contact behavior, provides a detailed description of its topology optimization design scheme, and analyzes the main factors affecting the design results of flexible fingers.
2.1. Topology Optimization Formulations
The design of flexible fingers is transformed into a topology optimization problem considering the contact behavior of the target object. The optimization model can be expressed as
where is the global stiffness matrix of design domain; is the external nodal load vector; and are the global displacement vectors under the actuation of and , respectively; (or ) and are the element displacement vector and stiffness matrix, respectively; is the vector of design variables; is a vector of minimum relative densities; N is the number of elements used to discretize the design domain; is the penalization power (typically ); and are the material volume and design domain volume, respectively; f is the prescribed volume fraction; is the internal nodal load vector; and and are the contact stress and the specified maximum stress, respectively.
The density filter is employed [49]. It transforms the design variable, , of element to the element relative density, , of element i as follows:
where is a normalized weight factor defined as follows:
where and are the volume of element i and m, respectively, is the number of elements in the design domain, and is a distance factor, defined as follows:
in which is a constant filter radius, is the center- to-center distance of elements m and j.
The FEA results of two load cases are used to perform sensitivity analysis [50]. One is the load case which, when the applied external force, is , and the other is the load case when the applied external force increases slightly to , where h is set to for structural design. The updated Lagrangian approach is employed in ANSYS. The sensitivity of the objective function and material volume V with respect to the element density is given by:
where is the increment of the strain energy of original element i, and is the increment of the strain energy of hyperelastic element i. Here, the small constant is added to the denominator of the second right-hand term to avoid division by zero when . The increment of the strain energy are given by the following:
where and are the strain energy of element i and the hyperelastic element i in the second load case, respectively. and are the strain energy of element i and the hyperelastic element i in the first load case, respectively. Using the finite difference method to represent the sensitivity of contact stress with respect to element density is given by:
The design variable is updated by the method of moving asymptotes (MMA) [51] after sensitivity analysis.
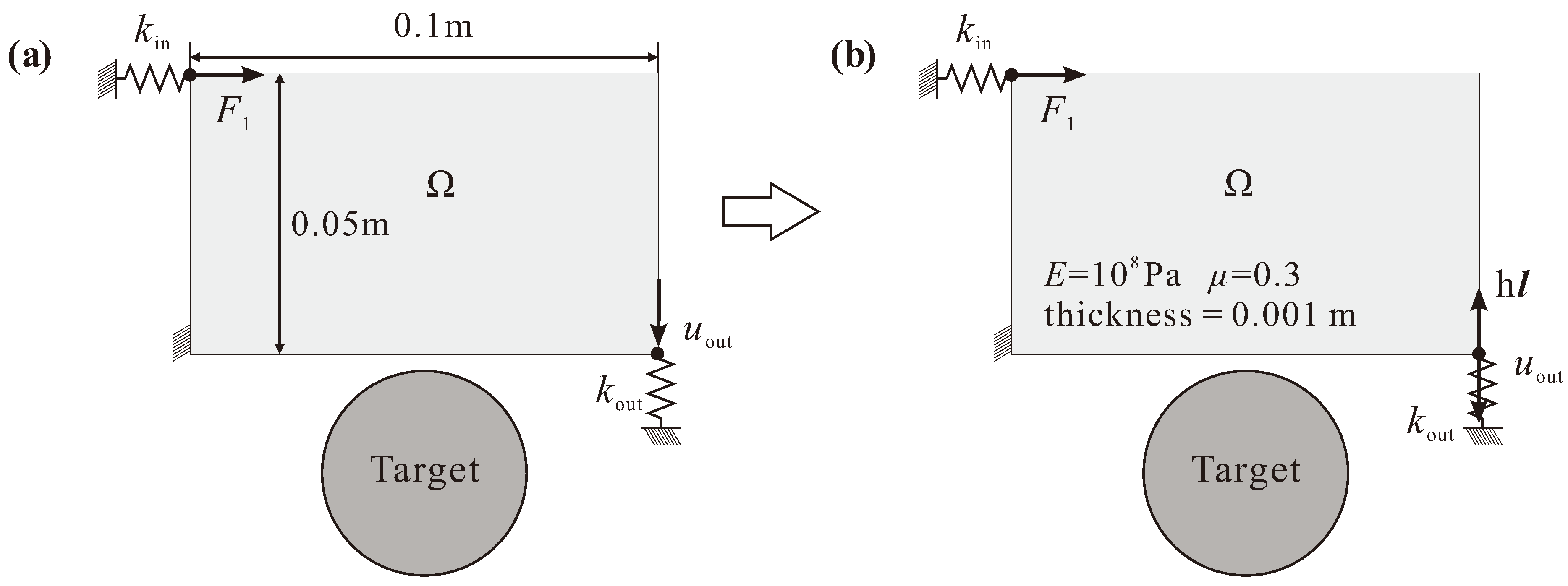
The topology optimization is implemented in the MATLAB R2020. Ideally, the topology optimization problem for flexible fingers can be represented as shown in Figure 2. The lower end of the left side of the design domain is fixed, and a horizontal force is applied to the upper end of the left side to represent the active load. The influence of external objects is introduced at the midpoint of the bottom edge, and the lower right corner produces a vertical displacement . The design for the flexible finger comprises one input port, one fixed port, and one output port, while considering the contact target. The design domain undergoes discretization utilizing a grid composed of four-node square elements, with each element measuring mm. The Young’s modulus E and Poisson’s ratio are set to Pa and 0.3, respectively. Noteworthy numerical parameters encompass the values penalty factor , and sensitivity filter radius . The magnitude of the actuating external force, , is 10 N. To find out the suitable design parameters for the problem, the values of input stiffness , output stiffness and volume fraction are selected within the range of , and , respectively.
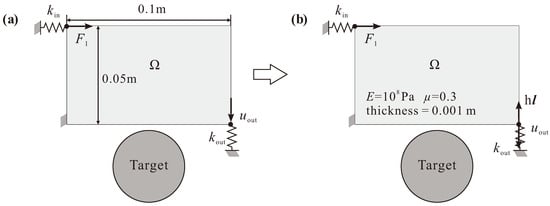
Figure 2.
(a) The design domain and boundary condition for the flexible finger design considering contact behavior. (b) The load case when an additional external force, , is applied. The solution is obtained for sensitivity analysis.
2.2. Design Results of Flexible Fingers
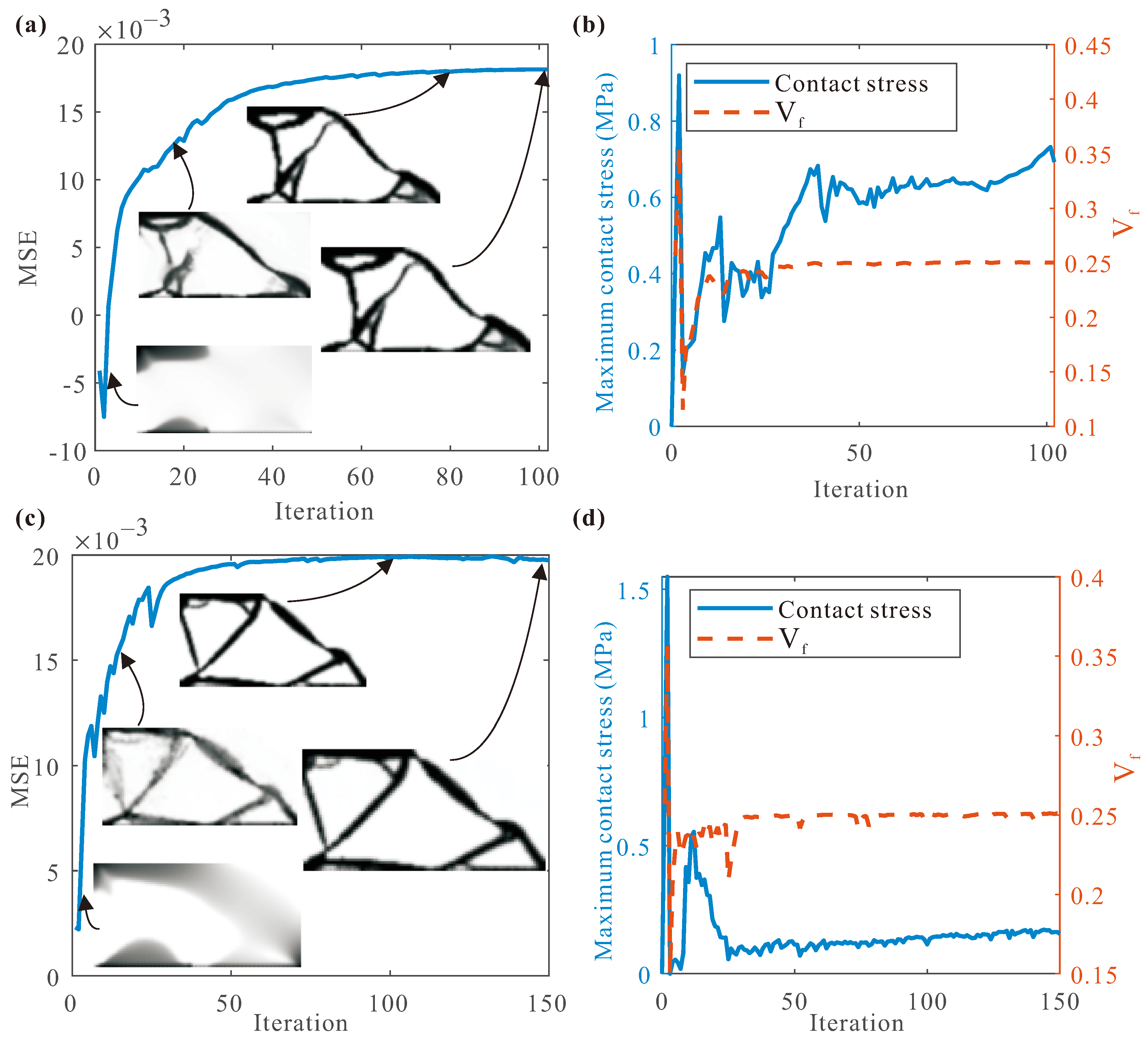
Two sets of valid flexible fingers were chosen from the entire set of topological results, specifically referring to finger 1 as depicted in Figure 3a and finger 2 as illustrated in Figure 3c. For finger 1, its design considering the contact behavior of the target object, and the specific design parameter value were configured as follows: N/m, N/m and . The topology optimization algorithm for finger 1 achieved convergence after 102 iterations. Figure 3a showcases the relationship between the number of iterations and the objective function value. Specific results for selected iterations (3rd, 20th, 80th, and 102th) are also presented. Notably, the topological configuration tends to remain relatively stable beyond the 80th iteration. In the graphical representation, the white region corresponds to elements with pseudo-densities equal to , the dark region signifies elements with pseudo-densities equal to 1, while the gray region denotes elements with pseudo-densities ranging between and 1. Figure 3b shows the volume fraction and contact stress convergence histories of finger 1.
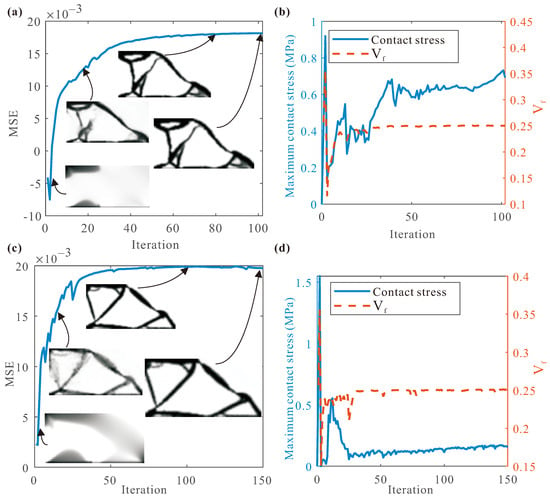
Figure 3.
Convergence history and optimization results of (a) finger 1: objective function values and optimal layouts obtained at specific iterations (3rd, 20th, 80th, and 102th), (b) finger 1: Volume fraction and contact stress convergence history. (c) finger 2: objective function values and optimal layouts obtained at specific iterations (3rd, 25th, 100th, and 150th), (d) finger 2: Volume fraction and contact stress convergence history.
Finger 2 was the topological result obtained by introducing contact stress constraints, and all other conditions are set the same as finger 1. Figure 3c illustrates the relationship between the number of iterations and the normalized objective function value for finger 2. Specific results for some specific iterations (3rd, 25th, 100th, and 150th) are presented within the figure. The volume fraction and contact stress convergence histories for finger 2 are shown in Figure 3d. At the beginning of the iteration, a poor topology (e.g., 3rd in Figure 3) will result in a large maximum contact stress. It can be seen from the figure that for a design subject to contact stress constraints, the contact stress tends to stabilize during its iteration process. The final topologies of both finger 1 and finger 2 have a of 0.25. Finger 2 has a simpler internal structure and a smaller contact stress than finger 1.
2.3. Design Parameters’ Influence on Topology
The design parameters employed in topology optimization can exert significant influence on the resulting topology and performances. To comprehensively investigate the impact of design parameters on the structure and functionality of the flexible finger, the effects of , , , , and were varied and analyzed individually on the basis of a referenced set of parameters. Since finger 2 shows better grasping performance in our following discussion, the parameters of finger 2 are taken as the referenced set of design parameters.
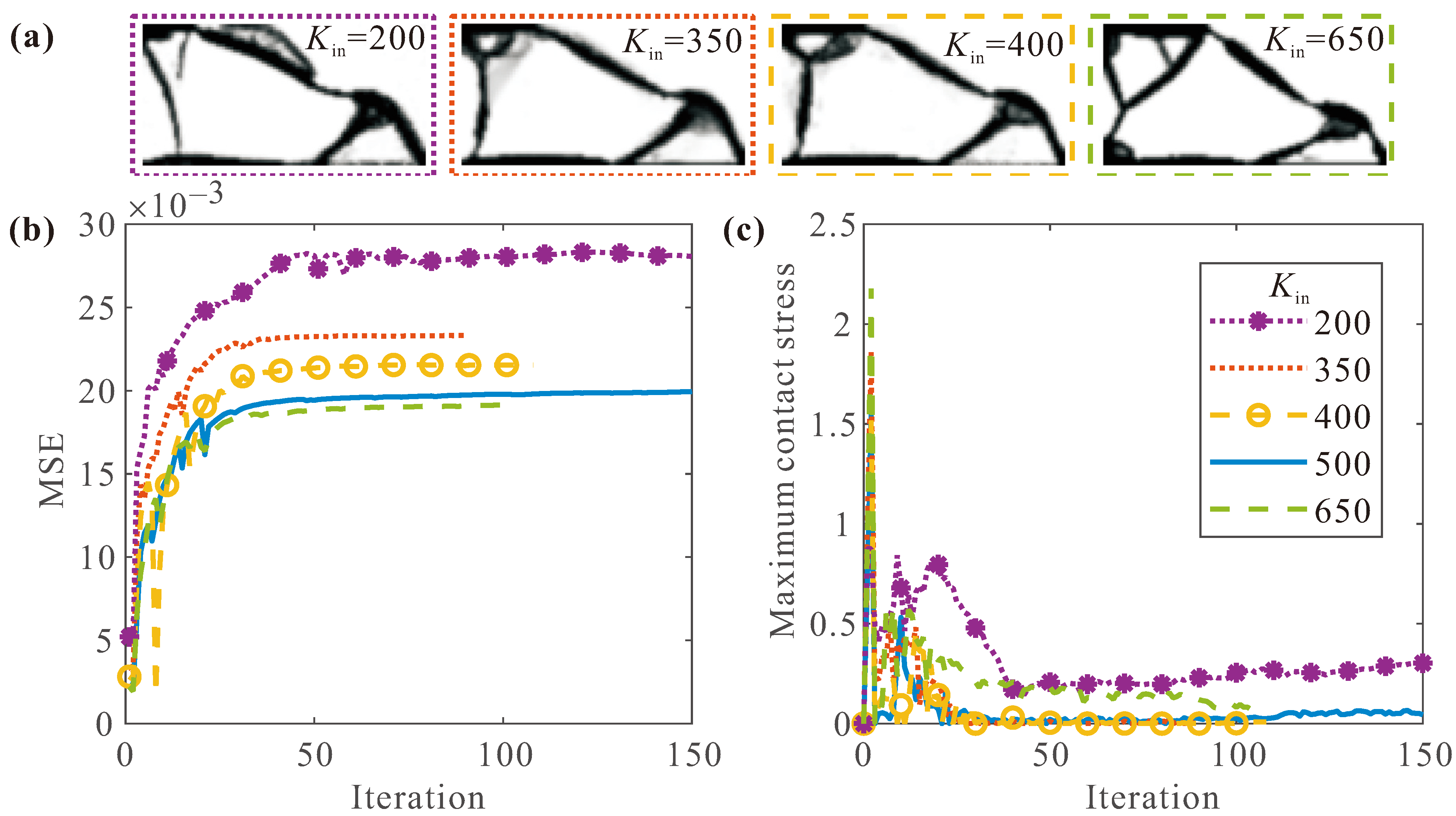
Firstly, the spring stiffness is changed within the range of N/m, while the N/m, , and . A serial of topology optimizations has been carried out. Figure 4 shows part of the topology optimization results, including the convergence histories and final topologies for 200, 350, 400, and 650 N/m. The structural flexibility is characterized in terms of MSE. According to the convergence histories, the MSE of the final structure will reduce if takes a larger value, which indicates a greater output flexibility generated by the input forces. By comparing the final topologies from Figure 4a, it becomes evident that the choice of significantly influences the optimized topology. One can see that the final topology changes significantly in structure at the input port, i.e., the top left side of the design domain.
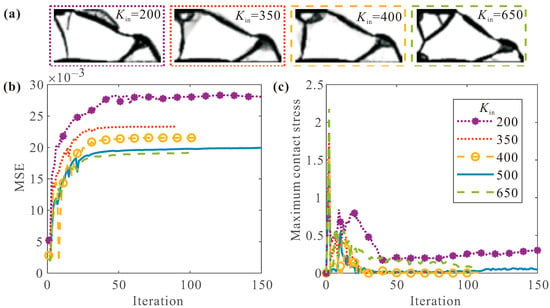
Figure 4.
(a) Final topologies for different ; the convergence histories of (b) MSE and (c) maximum contact stress for different .
A smaller value of will result in a suboptimal final topology, with the lower left end of the structure biased towards the bottom center of the flexible finger. This situation will lead to higher contact stress, e.g., N/m. That can be improved, and feasible topologies can be obtained when exceeds 350 N/m. It is also found that a large value of will increase the complexity of the final structure and the contact stress values, e.g., N/m. In contrast, finger 2 has smaller contact stresses and a more complete internal beam, which indicates that N/m can be a better virtual spring stiffness for the input port.
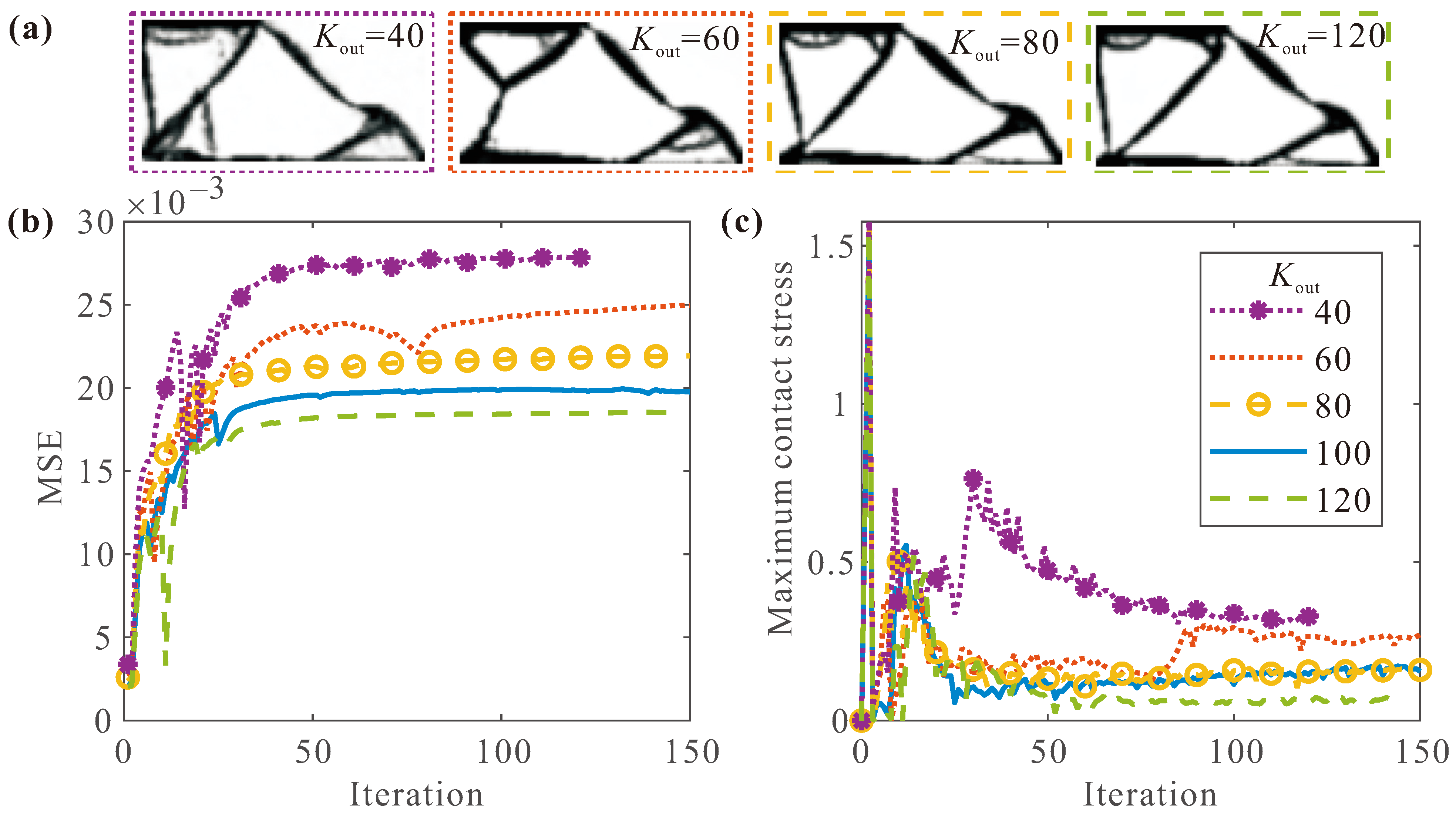
Secondly, the spring stiffness changes in the range of N/m, while the N/m, , and . Figure 5 shows some topology optimization results, including the convergence history and final topologies for 40, 60, 80 and 120 N/m. By comparing the final topologies from Figure 5a, it can be clearly seen that all the final topologies obtained exhibit similar overall profiles with slight differences in their internal structure. According to the convergence histories, a clear inverse correlation emerges between and the flexibility of the final topologies. As the value of increases, MSE of the structure decreases, making the final topology less flexible at its output port and the maximum contact stress decrease. Despite the output flexibility decreases, a larger will result in a topology with larger payload capacity, i.e., greater stiffness to withstand the load imposed by the target. For a soft gripper, it should have sufficient flexibility to adapt the shape and size of target, but also have the capability to securely grasp the object and prevent it from slipping. To balance between the flexibility and carrying capacity, N/m is selected as the appropriate stiffness at the output port.
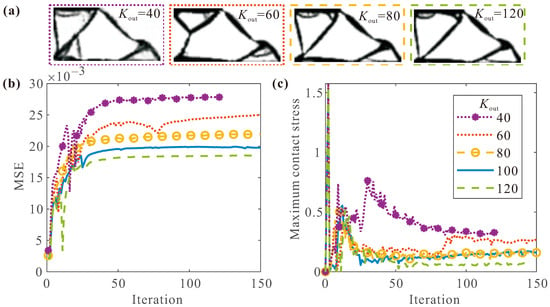
Figure 5.
(a) Final topologies for different ; the convergence histories of (b) MSE and (c) maximum contact stress for different .
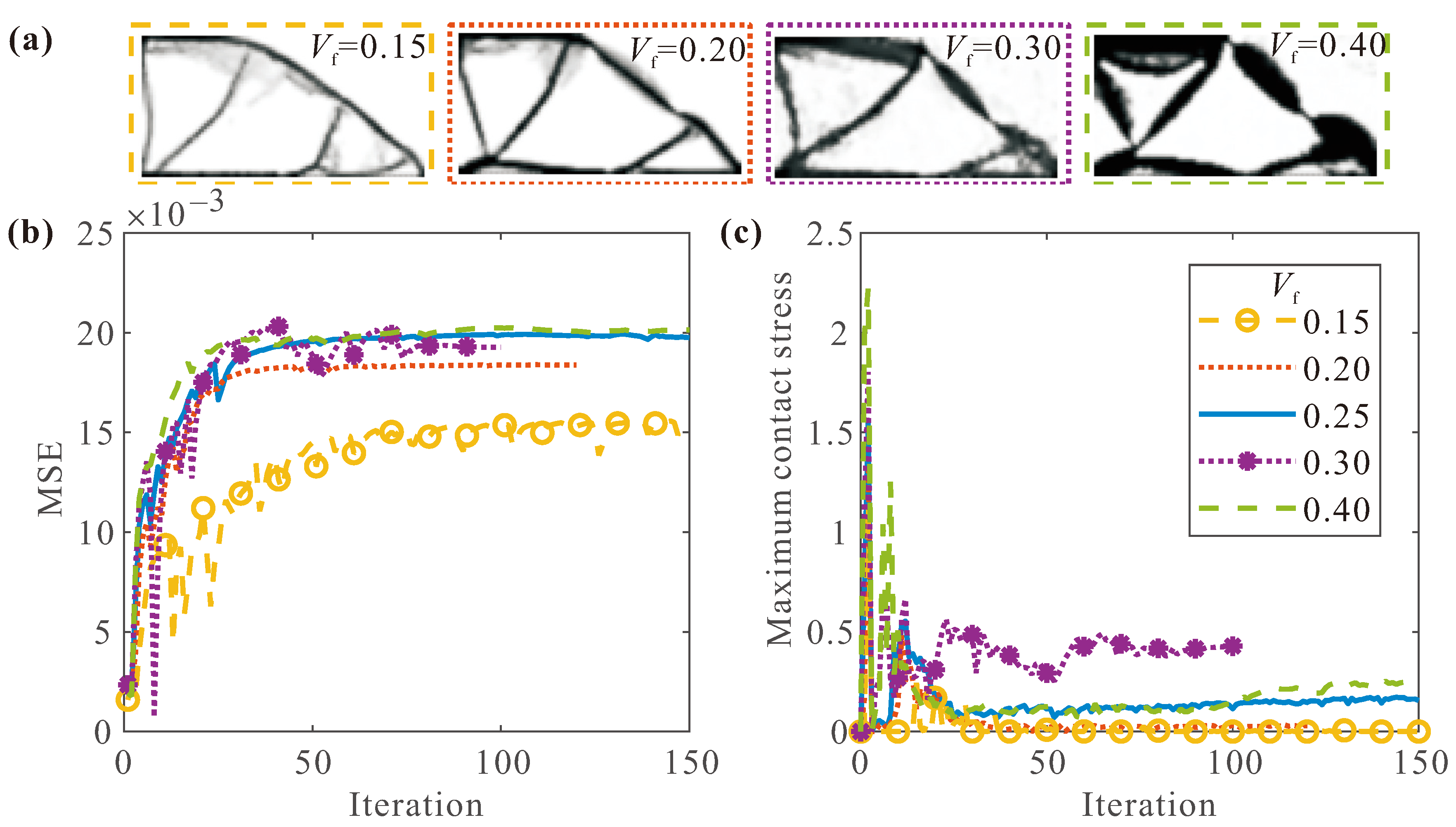
Thirdly, the volume fraction changes in the range of , while the N/m, N/m, and . Figure 6 shows some topology optimization results, including the convergence history and final topologies for 0.15, 0.20, 0.30 and 0.40. Through a comparative analysis of the final topologies, it becomes evident that final topologies by different have analogous overall profiles, but diverging in the thickness dimensions of the beams. After exceeds 0.15, the hinge of the obtained final topology and the MSE change less. As the value of increases, MSE of the structure increases, making the final topology more flexible at its output port and greater weight. The contact stress of the structure decreases with the increase in . In particular, will bring the maximum contact stress value. Considering the flexibility, contact stress and practicality of flexible fingers, is a suitable choice.
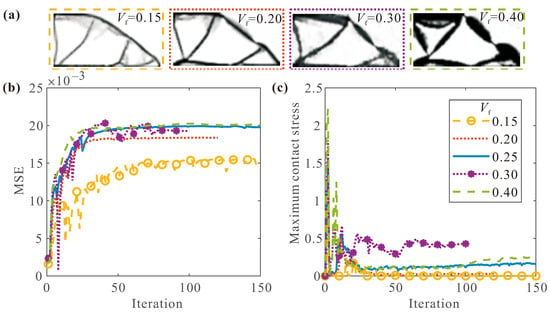
Figure 6.
(a) Final topologies for different ; the convergence histories of (b) MSE and (c) maximum contact stress for different .
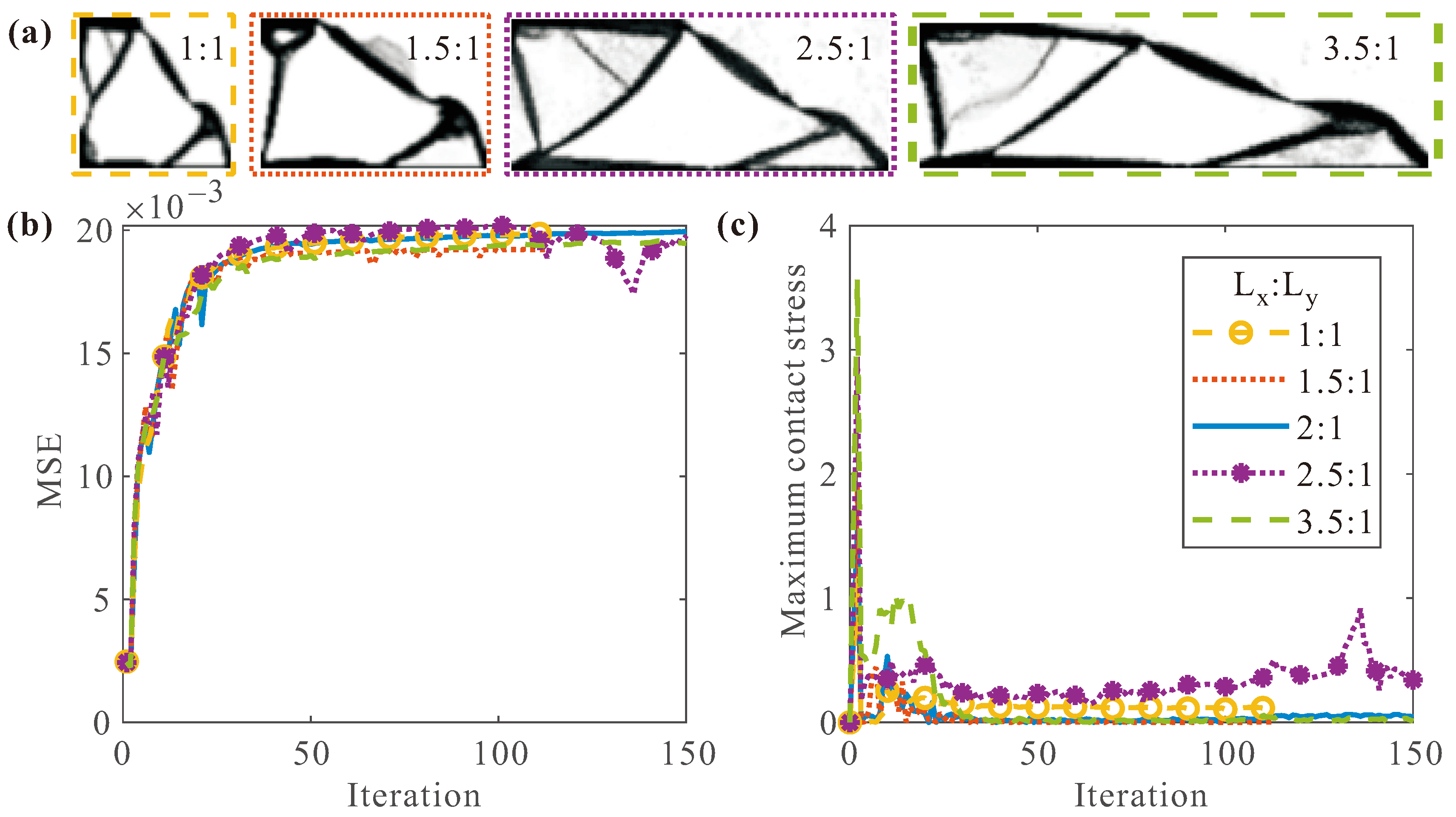
Then, the design domain size changes in the range of , while the N/m, N/m, and . A series of topology optimizations were performed for different . Figure 7 shows some topology optimization results, including the convergence history and final topologies for 1:1, 1.5:1, 2.5:1 and 3.5:1. As can be seen from all final topologies in Figure 7a, different design domain sizes () change the overall structure of the final topology. According to the convergence histories, different shows similar MSE, i.e., there is no obvious relationship between and the flexibility of the final topology in this design problem. However, both smaller and larger will make the contact stress of the final topology larger. Therefore, is a more appropriate choice.
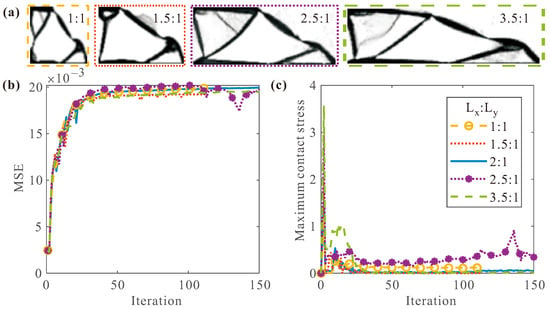
Figure 7.
(a) Final topologies for different ; the convergence histories of (b) MSE and (c) maximum contact stress for different .
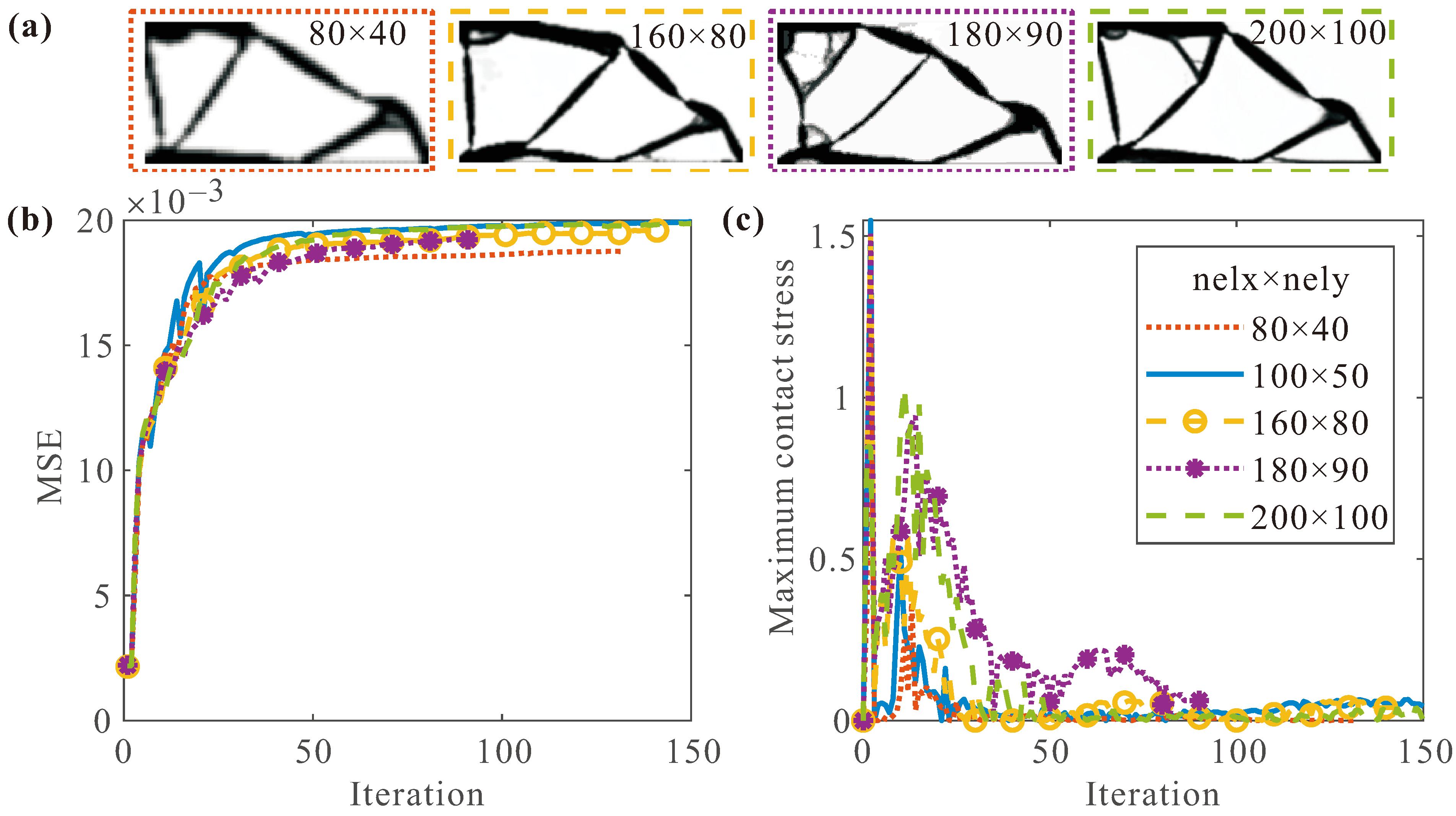
Finally, the discretization is analyzed by varying the grid density. The changes in the range of , while the N/m, N/m, and . A series of topology optimizations were performed for different . Figure 8 shows some topology optimization results, including the convergence history and final topologies for , , and . From Figure 8a, it can be clearly seen that different grid densities () produce different final results. When the grid density becomes larger, the time required by the topology program increases significantly. And the final structure will have many small branch structures, which will reduce the manufacturability of the flexible fingers. According to the convergence histories, the grid density has little effect on the MSE and contact stress of the topology structure. Considering the flexibility and manufacturability of the flexible fingers, is selected as a suitable grid density.
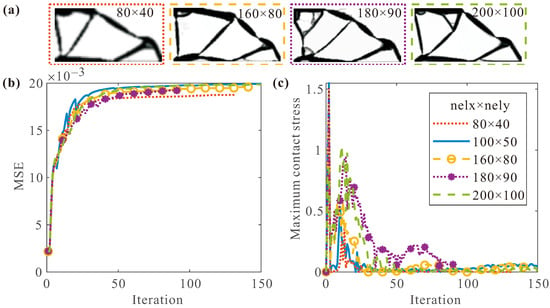
Figure 8.
(a) Final topologies for different ; The convergence histories of (b) MSE and (c) maximum contact stress for different .
3. Numerical and Experimental Studies of the Flexible Grippers
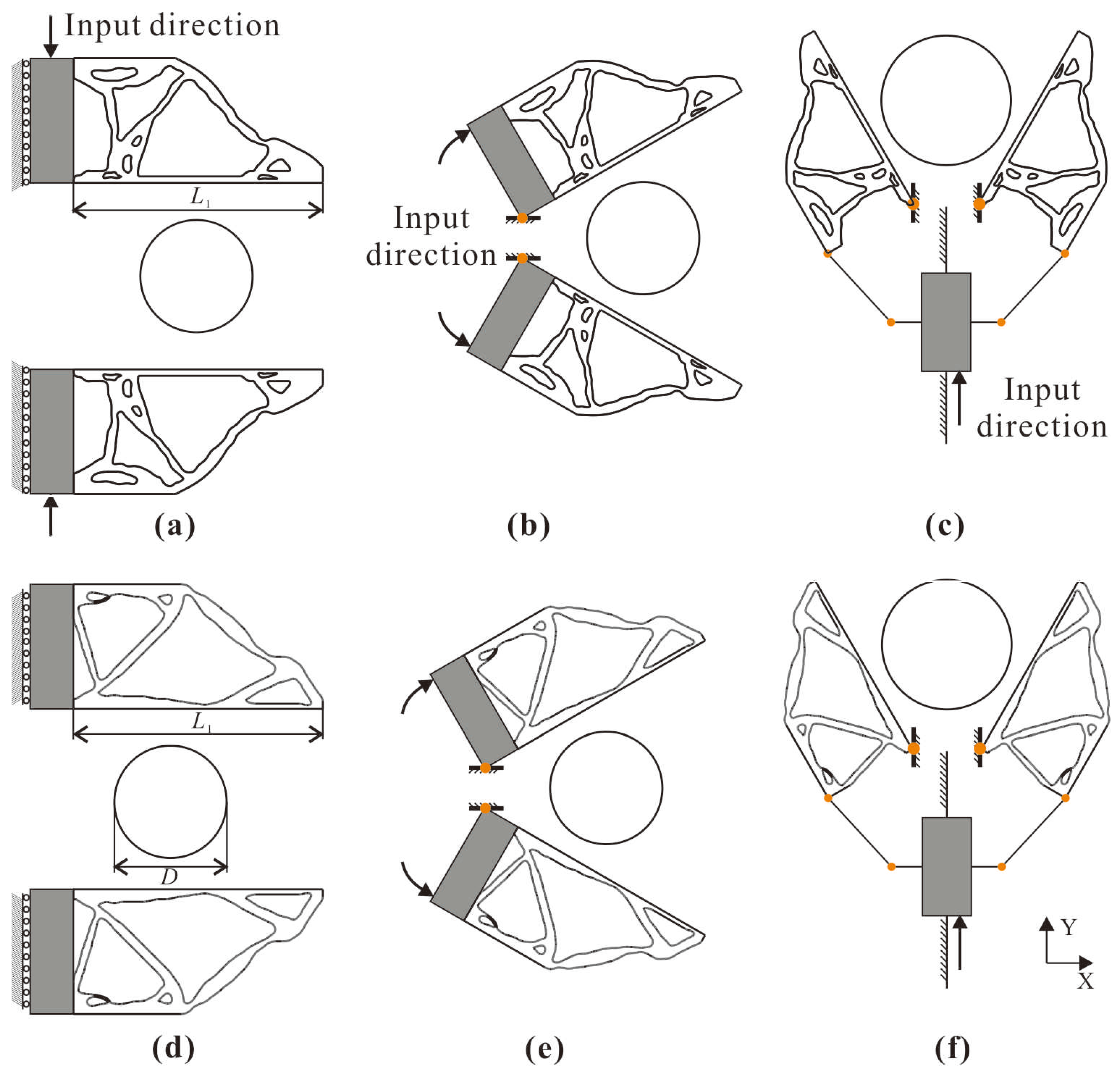
To comprehensively evaluate the performance of the designed flexible fingers, finger 1 and finger 2 were made into flexible grippers with three different actuation modes. Figure 9 shows the three two-finger grippers, denoted as translational gripper 1, translational gripper 2, angular gripper 1, angular gripper 2, active gripper 1, and active gripper 2. The length of each finger is limited to , and the diameter of target object is represented as D. Additionally, uniformity was maintained in terms of the input loading of the grippers and the initial position of the object with respect to the grippers. To evaluate the adaptability and performance of the flexible grippers, FEA simulations were conducted using ANSYS 2021. Experimental tests were carried out to further investigate the performances of the grippers. This comprehensive analysis can better confirm the advantages of flexible grippers that consider contact behavior and the application potential in picking robots.
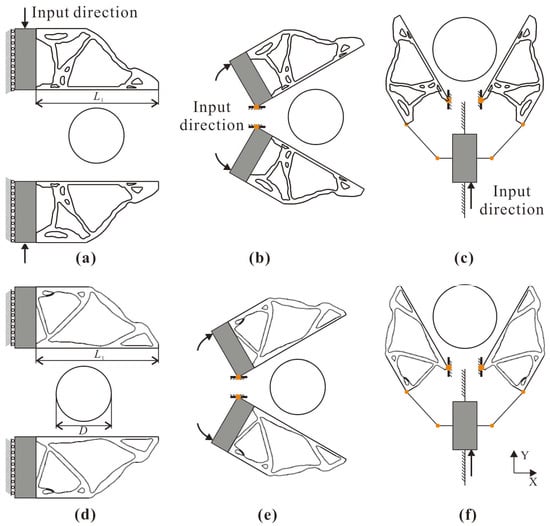
Figure 9.
The grippers consisting of finger 1 and finger 2: (a) translational gripper 1, (b) angular gripper 1, (c) active gripper 1, (d) translational gripper 2, (e) angular gripper 2, (f) active gripper 2.
3.1. Verification of Contact-Constrained Flexible Fingers
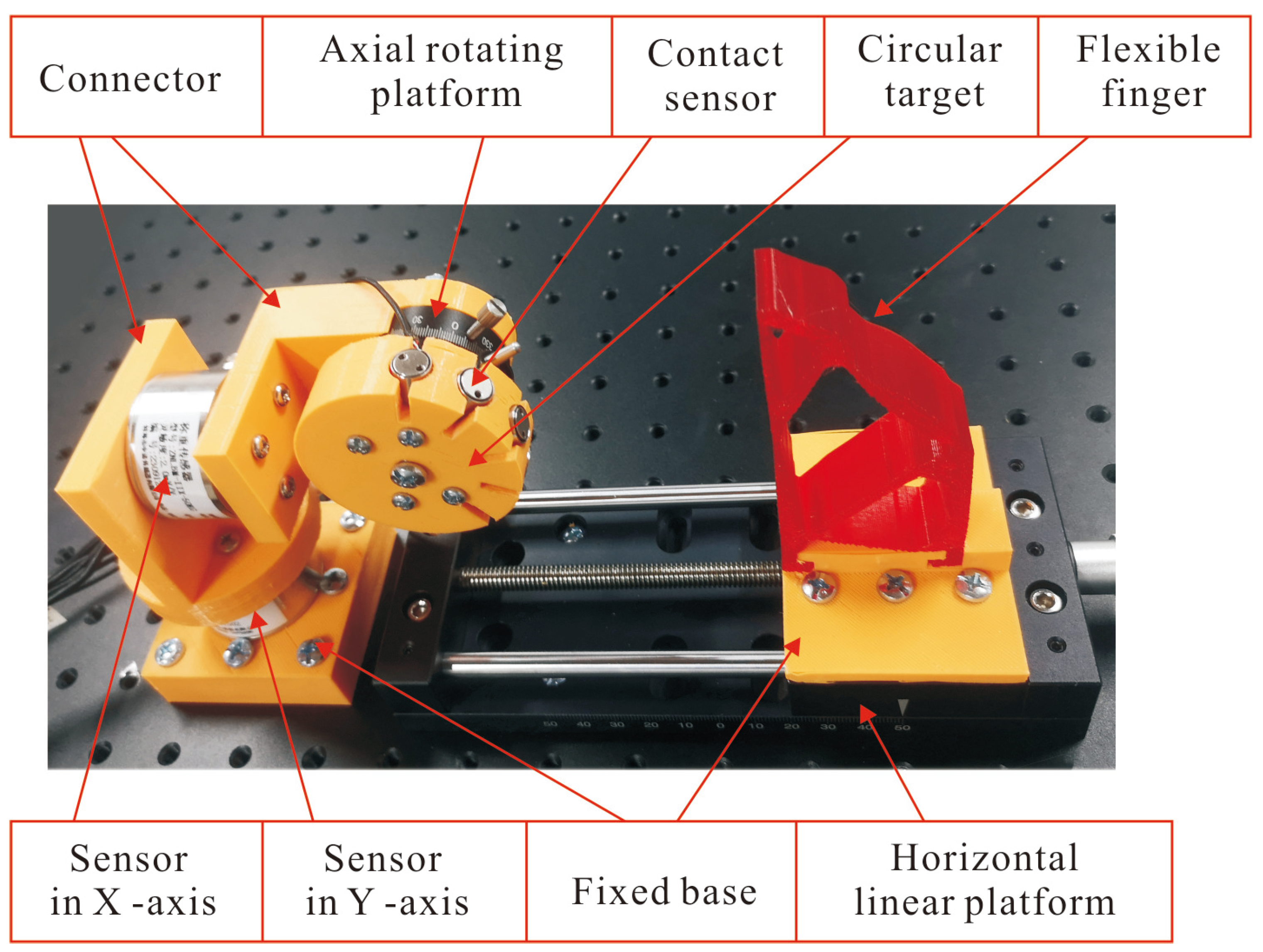
To verify the contact and deformation performance of the flexible fingers, a test device was designed (shown in Figure 10). First, all the fingers were fabricated through 3D printing, employing thermoplastic polyurethane elastomer (TPU) with a hardness of 95 Shore A. The test flexible finger was fixed on a horizontal platform. Finally, the target was fixed to the test platform through the X-axis sensor, Y-axis sensor and connectors. Five contact sensors were installed circumferentially on the right side of the target. The X-axis sensor and Y-axis sensor used in the experiment are the compression sensor, which are provided by Zhongnuo Chuanli, China, and the model is ZNLBM-IIX. Each sensor has a measuring range of 0∼500 N and an accuracy of 0.15 N. The contact sensor model is ZNLBM-X, and each sensor has a measuring range of 0∼100 N and an accuracy of 0.03 N. To simultaneously measure the grasping force exerted on the object along the X-axis and Y-axis, a connector was designed to connect the two sensors, as shown in Figure 10.
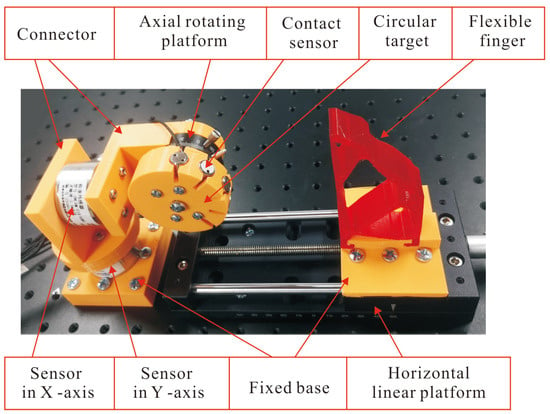
Figure 10.
Labeled experimental setup for testing flexible grippers.
A horizontal linear stage displaced the flexible finger against the test object by a 20 mm stroke in 1 mm steps. At each step, all of the sensors record the force generated. To obtain more comprehensive contact stress data, the axial rotation platform rotated the target 10 degrees around the center of the circle, and a second test was performed on each finger to obtain contact data at additional five positions. Note that the experiment was repeated five sets of ten times and averaged to reduce errors.
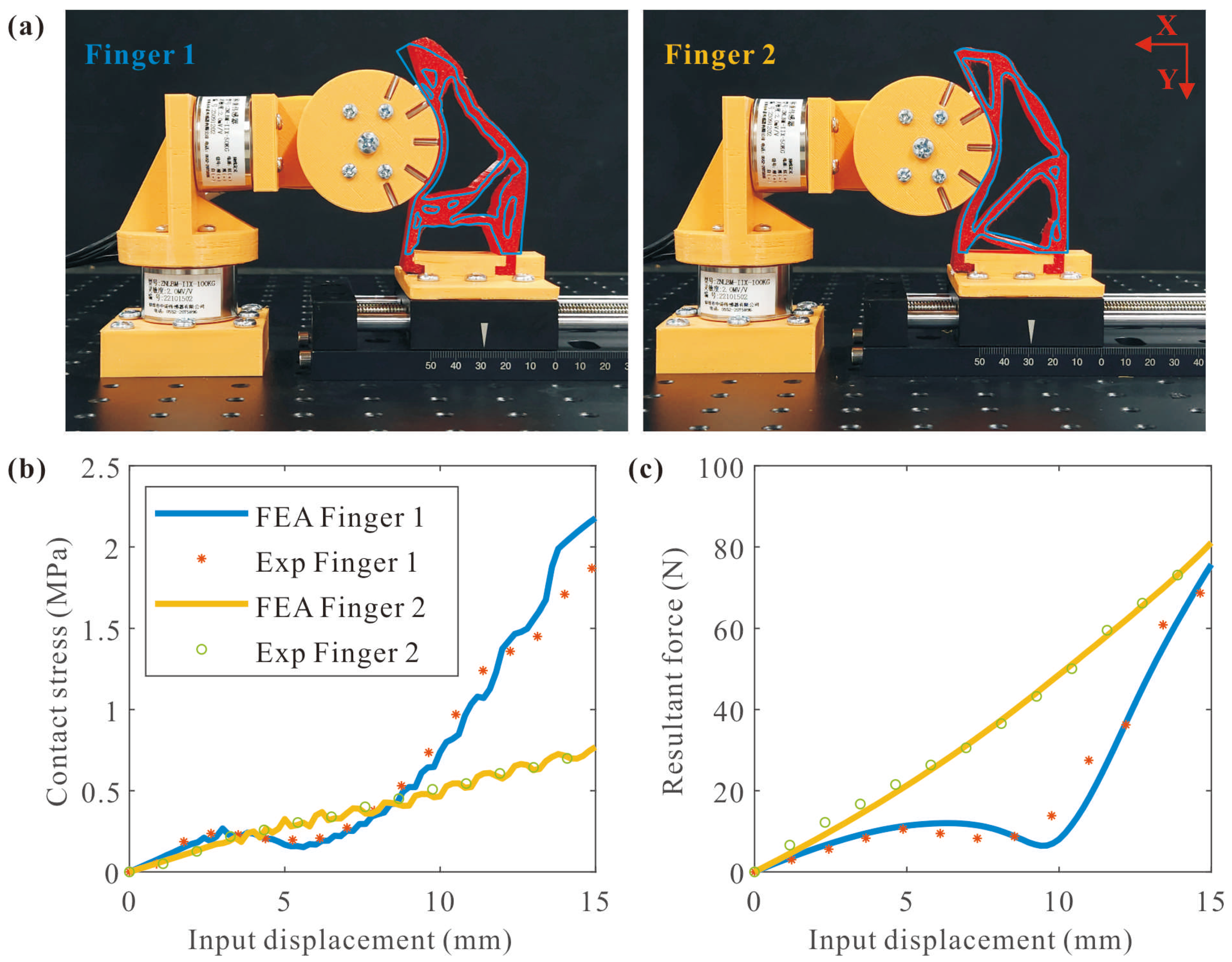
The results of FEA and experimental results were compared. Figure 11a shows the FEA and experimental deformation results when the object displacement was 15 mm. It can be clearly seen from the figure that the FEA deformation results of the two fingers are consistent with the experimental results, and the flexible fingers can fit the target well. Figure 11b compares FEA data and experimental data of fingers’ contact stress, respectively. Figure 11c compares FEA data and experimental data of fingers’ resultant force, respectively. The FEA results closely matched the experimental data from the physical tests, which confirms the accuracy of the FEA results.
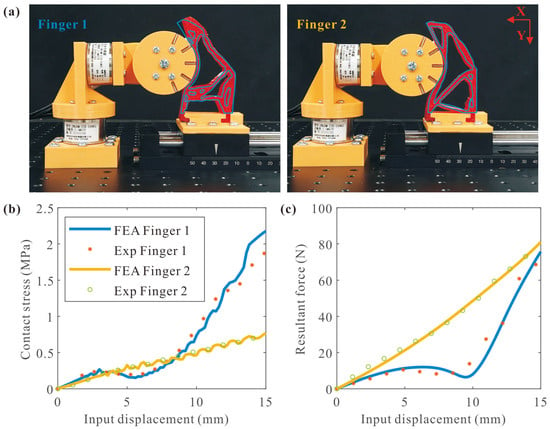
Figure 11.
FEA and experimental results of two fingers: (a) deformation results, (b) contact stress response, (c) resultant force response.
The maximum standard deviation for the two flexible fingers in the contact stress were 1.8% and 0.6%, respectively. The deviation is caused by the nonlinear elastic material model in FEA. It can be found from the figure that, first, the contact stress and force response of finger 1 increase approximately linearly at small loading displacements and are changing a nonlinear fashion as the object displacement continues to increase. The contact area increment between finger 1 and the object becomes smaller, and the Y-axis force on the object decreases. This results in a reduction in finger 1 contact stress and force response. Finally, the object displacement further increases, and the Y-axis force increases in reverse which causing the contact stress and force response to increase rapidly. In contrast, the contact stress and force response of finger 2 are changing a linear fashion throughout the loading phase. These results affirm the effectiveness of our design strategy and the ability of finger 2 to have less contact stress in grasping objects.
3.2. Shape and Size Adaptability
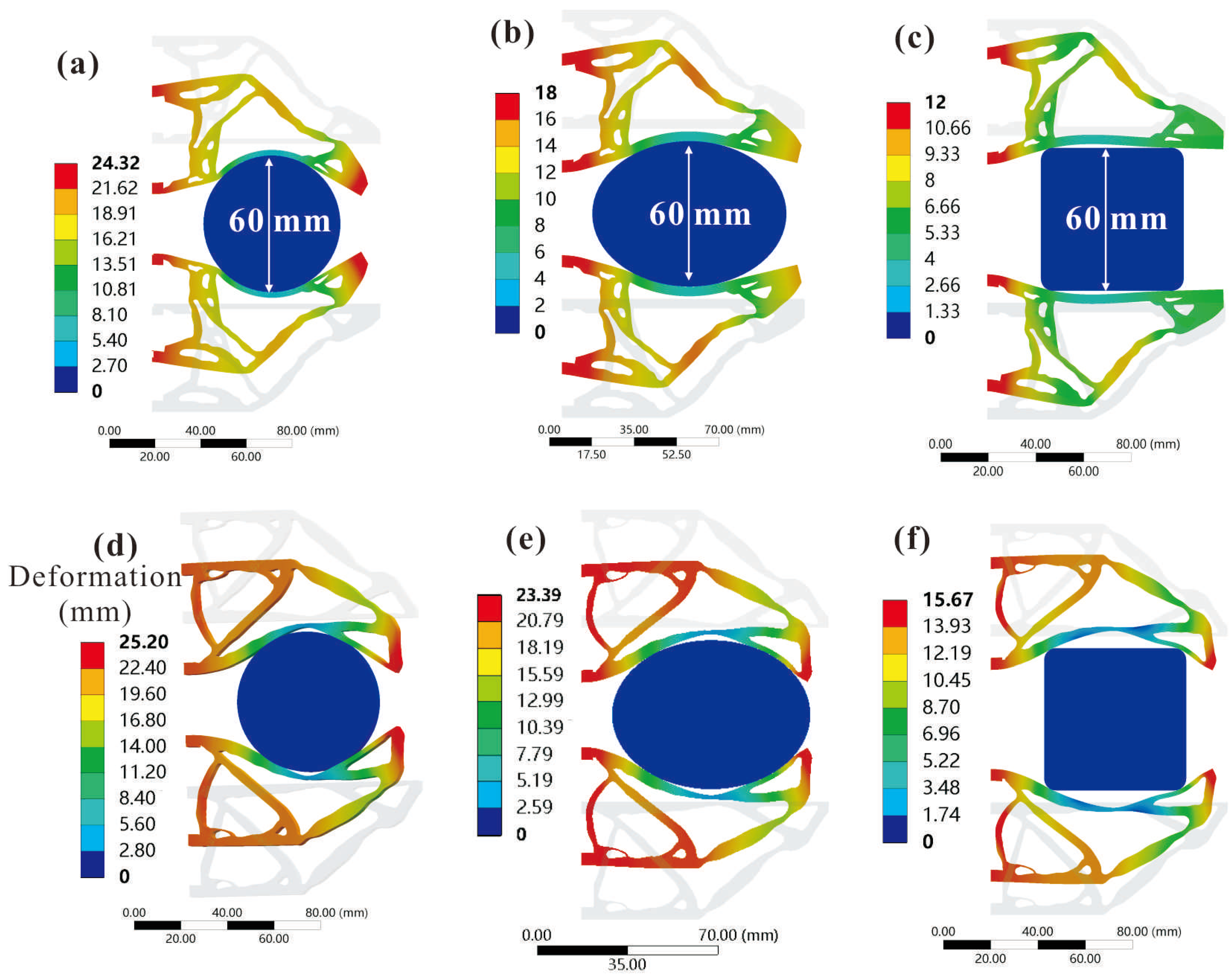
To evaluate the shape adaptability of the flexible fingers, six types of grippers were used to grasp objects of various shapes, including circles, ovals, and squares. The corners of the square objects were rounded, in order to avoid the FEA convergence problem caused by the sharp corners. A uniform input displacement or angle in the input-direction was applied to the grippers, as depicted in Figure 9. Figure 12 shows part of the FEA deformation results of the two translational grippers. The figures clearly indicate that the grippers composed of the two types of fingers exhibit great shape adaptability. Gripper 1 fits well with the surfaces of both circular and elliptical objects. Notably, gripper 2 exhibits more pronounced fingertip deformation for wrapping. Although there are gaps between the deformed fingers and the square target, gripper 2 still exhibits substantial overall adaptability in shape. These results confirm the flexible fingers’ ability of grasping objects of different shapes.
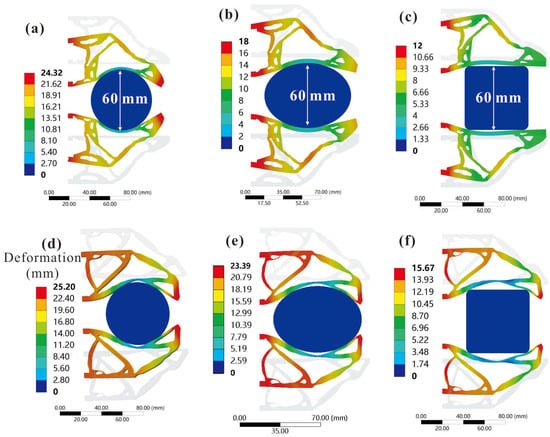
Figure 12.
Shape adaptability FEA results: translational gripper 1 grasps the (a) circular target, (b) oval target, (c) square target. Translational gripper 2 grasps the (d) circular target, (e) oval target, (f) square target.
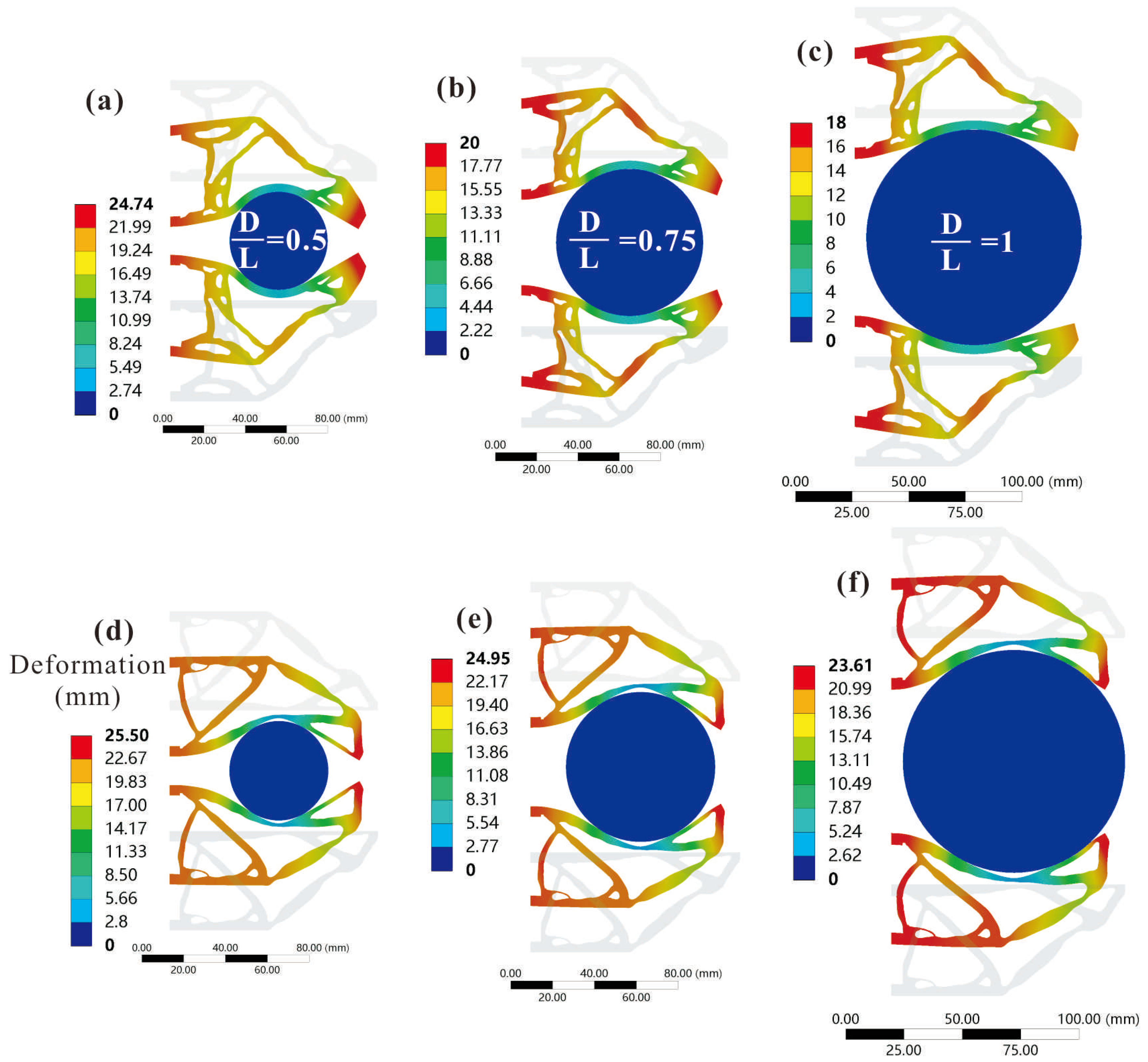
To assess the size adaptability of the flexible fingers, six types of grippers were used to grasp circular targets of different diameters, and the target-to-finger length ratios () changed within . Figure 13 shows part of the size adaptability results of the translational grippers. The analysis focused on the two grippers’ performance in grasping circular targets with different sizes, whose , , and 1, respectively. The results indicate that all grippers exhibit effective adaptation to the targets of different sizes. Gripper 1 shows a general wrapping effect. In contrast, gripper 2 showed great wrapping for all target sizes. This difference is mainly reflected in the different deformation of the fingertips. As the size of the target object increases, the wrapping effect of the gripper 2 continues to improve, further proving the superior size adaptability of the flexible fingers.
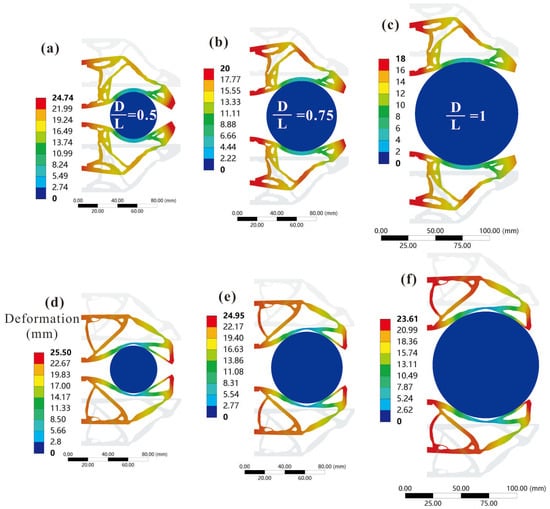
Figure 13.
Size adaptability FEA results: translational gripper 1 grasps the circular target with (a) , (b) , (c) . Translational gripper 2 grasps the circular target with (d) , (e) , (f) .
3.3. Performance Analysis of Flexible Grippers
To comprehensively evaluate the performance of the six grippers during object grasping, the grasping performance will be quantitatively compared in terms of the fingertip deformation and mean contact stress. Taking the six objects in Figure 12 and Figure 13 as grasping targets, a series of FEA simulations about the grasping process of the six grippers were carried out. Figure 14 and Figure 15 are the corresponding performance data graph when the grippers grasping six targets, showing the impact of input loading on performance indicators. Note that all results exclude the stage when the flexible finger is not in contact with the target, and the input loading starts from contact with the target.
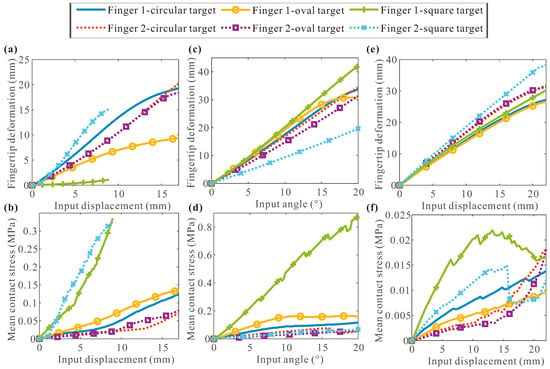
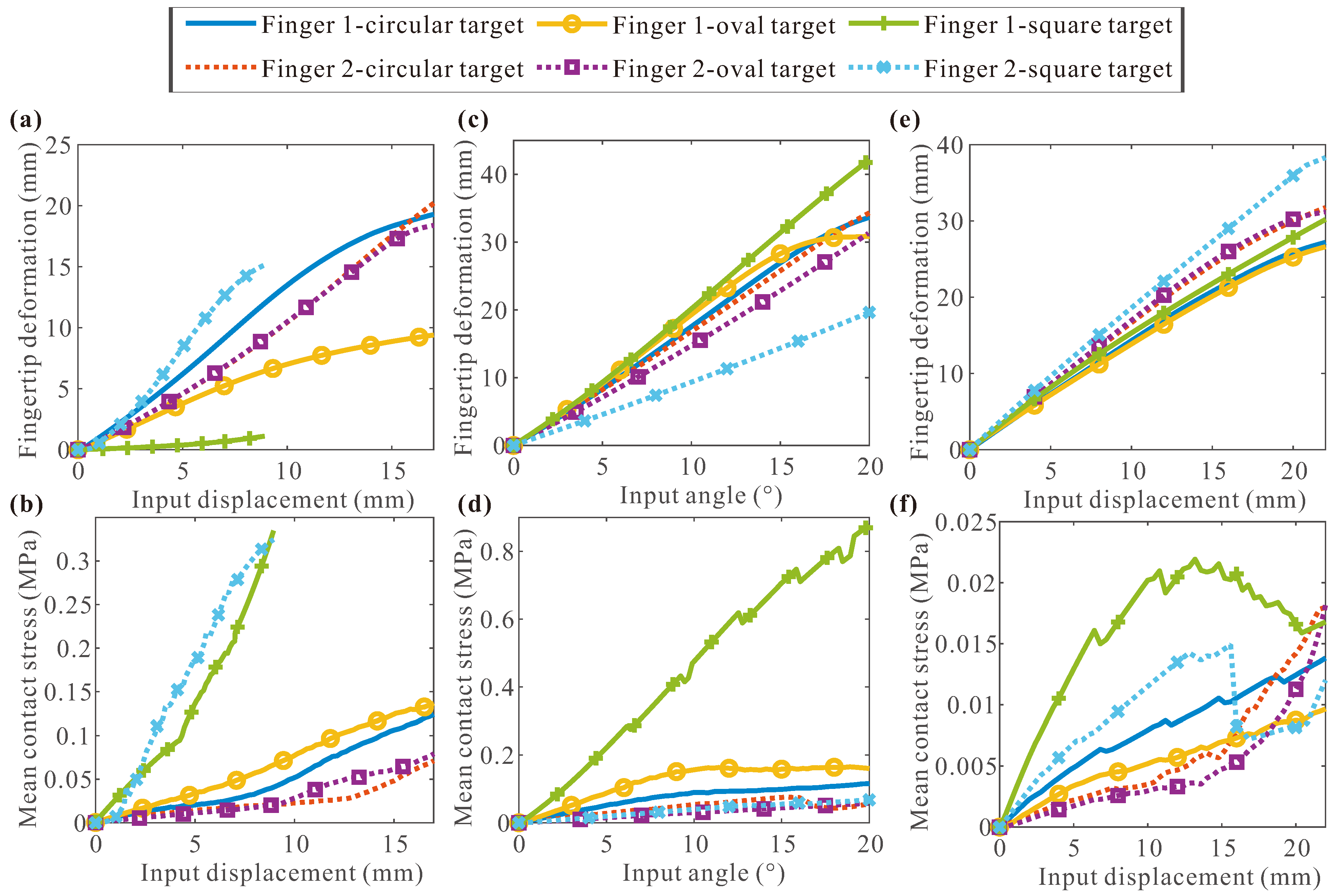
Figure 14.
The translational grippers grasping objects of different shapes (a) fingertip deformation results, (b) mean contact stress results. The angular grippers grasping objects of different shapes (c) fingertip deformation results, (d) mean contact stress results. The active grippers grasping objects of different shapes (e) fingertip deformation results, (f) mean contact stress results.
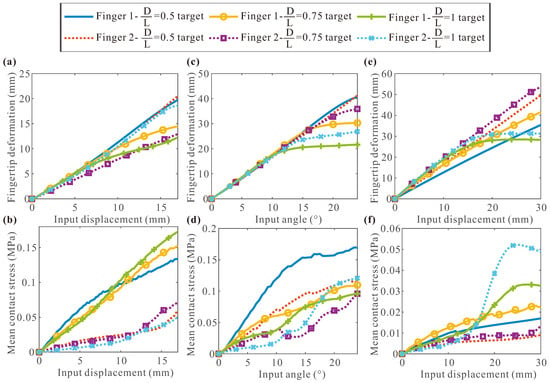
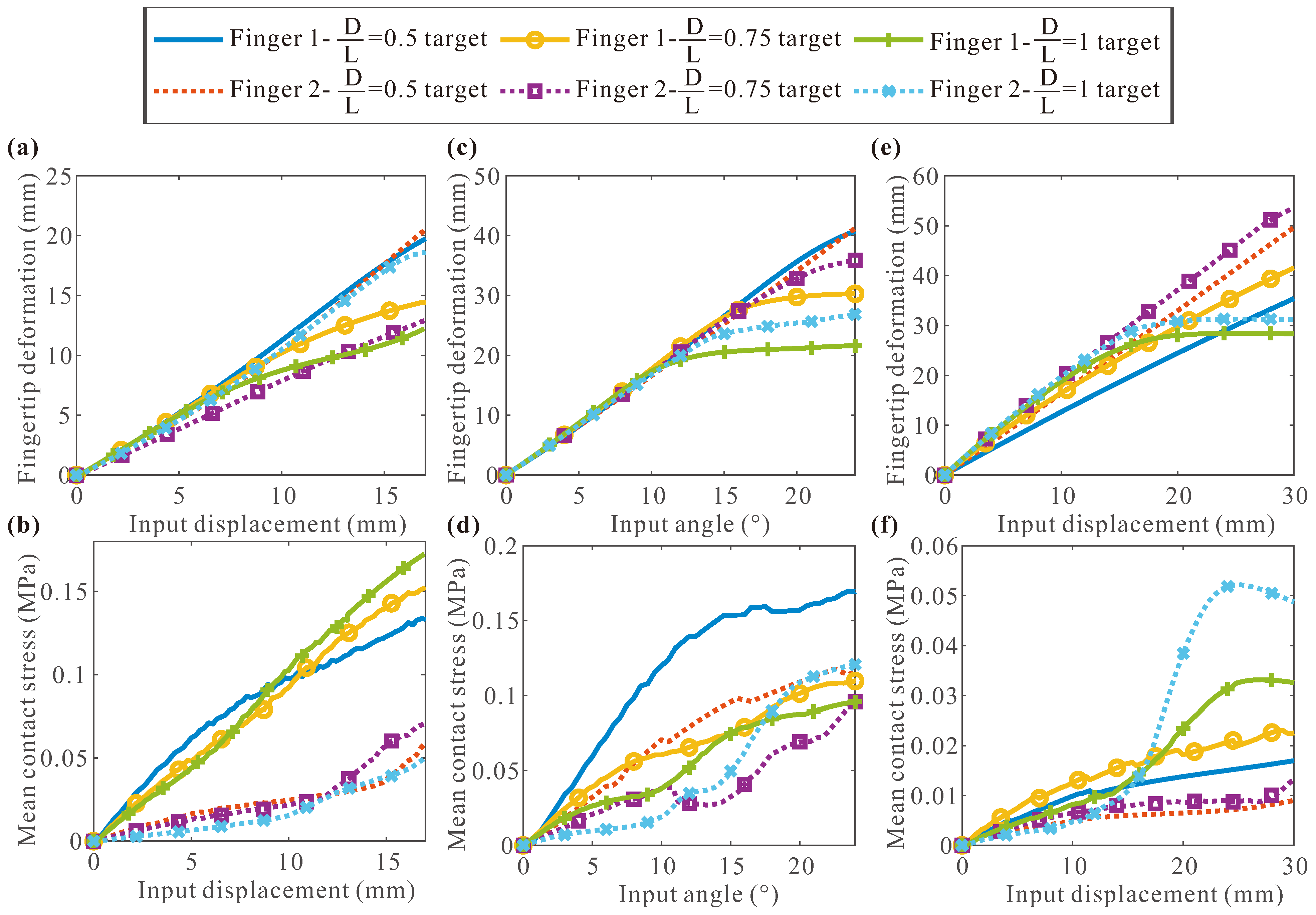
Figure 15.
The translational grippers grasping objects of different sizes: (a) fingertip deformation results, (b) mean contact stress results. The angular grippers grasping objects of different sizes: (c) fingertip deformation results, (d) mean contact stress results. The active grippers grasping objects of different sizes: (e) fingertip deformation results, (f) mean contact stress results.
In Figure 14a,b, it can be observed that when the translational grippers grasp targets of different shapes, fingertip deformation and mean contact stress increase with the input displacement. For small input displacements, the growth is linear. However, for excessively large input displacements, it becomes nonlinear. Specifically, the fingertip deformation of translational gripper 1 is larger than that of gripper 2 when grasping circular targets. As the input displacement increases, the fingertip deformation of gripper 2 approaches or even exceeds that of gripper 1. Notably, throughout the entire process of the translational gripper grasping an oval target, the fingertip deformation of gripper 2 consistently surpasses that of gripper 1. Additionally, the mean contact stress of gripper 2 is consistently smaller than that of gripper 1 during the process of grasping both circular and oval targets. The indices related to the square target differ significantly due to all the grippers contacting the square target at the corners. The mean contact stress of translational gripper 2 is generally larger than that of gripper 1, but the fingertip deformation of gripper 2 consistently surpasses that of gripper 1 when grasping the square target. Figure 12c,f further reveal that the grasping effect of gripper 2 is better. These results collectively suggest that translational gripper 2 is more suitable than gripper 1 for grasping circular and oval targets. Despite the higher contact stress when grasping square targets, translational gripper 2 still demonstrates good shape adaptability.
From Figure 14c,d, it becomes evident that most fingertip deformations of the angle gripper change linearly when grasping different shaped targets. Nonlinear increases occur only when angle gripper 1 grasps the oval target at a larger input angle. Furthermore, the fingertip deformations of angle gripper 1 and gripper 2 are very close when grasping circular targets, with angle gripper 2 exhibiting smaller deformations for the other two shapes. When grasping targets of three shapes, the mean contact stress of angle gripper 2 is consistently smaller than that of gripper 1. Figure 14e,f illustrate that when the active gripper grasps objects of different shapes, fingertip deformation exhibits linear growth under small input displacement, becoming nonlinear for larger displacements. Moreover, throughout the entire grasping process, the fingertip deformation of active gripper 2 surpasses that of gripper 1. For circular and oval targets, the mean contact stress of active gripper 2 is smaller than that of gripper 1 under small displacement loading. However, when the input displacement exceeds 18 mm, the mean contact stress of gripper 1 becomes smaller. Notably, the mean contact stress of active gripper 2 is consistently smaller than that of gripper 1 when grasping square targets. In conclusion, the results indicate that the three grippers by finger 2 exhibit good shape adaptability, maintain small contact stress, and perform better when grasping targets with a certain curvature.
Figure 15 shows the performance data of six grippers when grasping circular targets of different sizes (, 0.75 and 1). As depicted in Figure 15a, when grasping targets of varying sizes, the fingertip deformation of translational gripper 1 exhibits linear growth under small input displacements. However, for large input displacements, the fingertip deformation of translational gripper 1 changes nonlinearly. Conversely, the fingertip deformation of translational gripper 2 demonstrates linear growth when grasping targets of three different sizes. Specifically, when grasping the target with , the fingertip deformation of translational gripper 2 is close to that of gripper 1. As the target size increases to , it becomes smaller than that of gripper 1. For , the fingertip deformation of translational gripper 2 is larger than that of gripper 1. Contrastingly, when grasping circular targets of different sizes, the mean contact stress of translational gripper 2 is consistently smaller than that of gripper 1, as shown in Figure 15b. The mean contact stress of translational gripper 2 is , , and smaller than that of gripper 1 when grasping targets with , 0.75 and 1, respectively. Figure 15c illustrates that when grasping targets of different sizes, the fingertip deformations of both angle grippers show similar linear growth at smaller input angles. This phenomenon is attributed to the target contacts the angle gripper near the fixed end firstly, while the fingertip part experiences rigid displacement. As the input angle increases, this phenomenon improves, and the fingertip deformation of the angle gripper shows a nonlinear change. Additionally, when grasping a target with , the fingertip deformation of angle gripper 2 is very close to that of gripper 1. However, as the target size increases, it surpasses the value of gripper 1 (e.g., and 1). Figure 15d shows that at a smaller input angle, the mean contact stress of angle gripper 2 is smaller than that of gripper 1. When the input angle exceeds , the contact stress of angle gripper 2 becomes larger than that of gripper 1 in grasping the target with . Finally, in Figure 15e,f, when grasping targets of different sizes, the fingertip deformation of active gripper 2 is greater than that of gripper 1. For and 0.7 targets, the fingertip deformation of the active gripper shows a linear growth trend. Moreover, the mean contact stress of active gripper 2 is much smaller than that of gripper 1. Conversely, when grasping a larger target (e.g., ), the fingertip deformation of the active gripper changes nonlinearly. The mean contact stress of active gripper 2 is smaller than that of gripper 1 only when the input displacement is small. When the input displacement exceeds mm, it becomes greater than that of gripper 1. The presented results indicate that the three grippers by fingers 2 exhibit good size adaptability and are capable of maintaining low contact stress. In particular, translational gripper 2 by flexible finger 2 significantly mitigates contact stress. Comparing the data in Table 1, it can be seen that this characteristic makes it well-suited for applications in fruit-picking robots.

Table 1.
The damage stress of fruits [52,53,54].
In conclusion, the comprehensive analysis presented above offers a holistic view of the grasping performance of the six grippers when handling different objects. The results show that, compared with the grippers by flexible fingers 1, the grippers by fingers 2 have similar or even larger fingertip deformation, and at the same time has a smaller mean contact stress. This means that the grippers composed of fingers 2 is more suitable for handling unstructured fragile targets, and also confirms the effectiveness of the design method proposed in this article.
3.4. Experimental Results
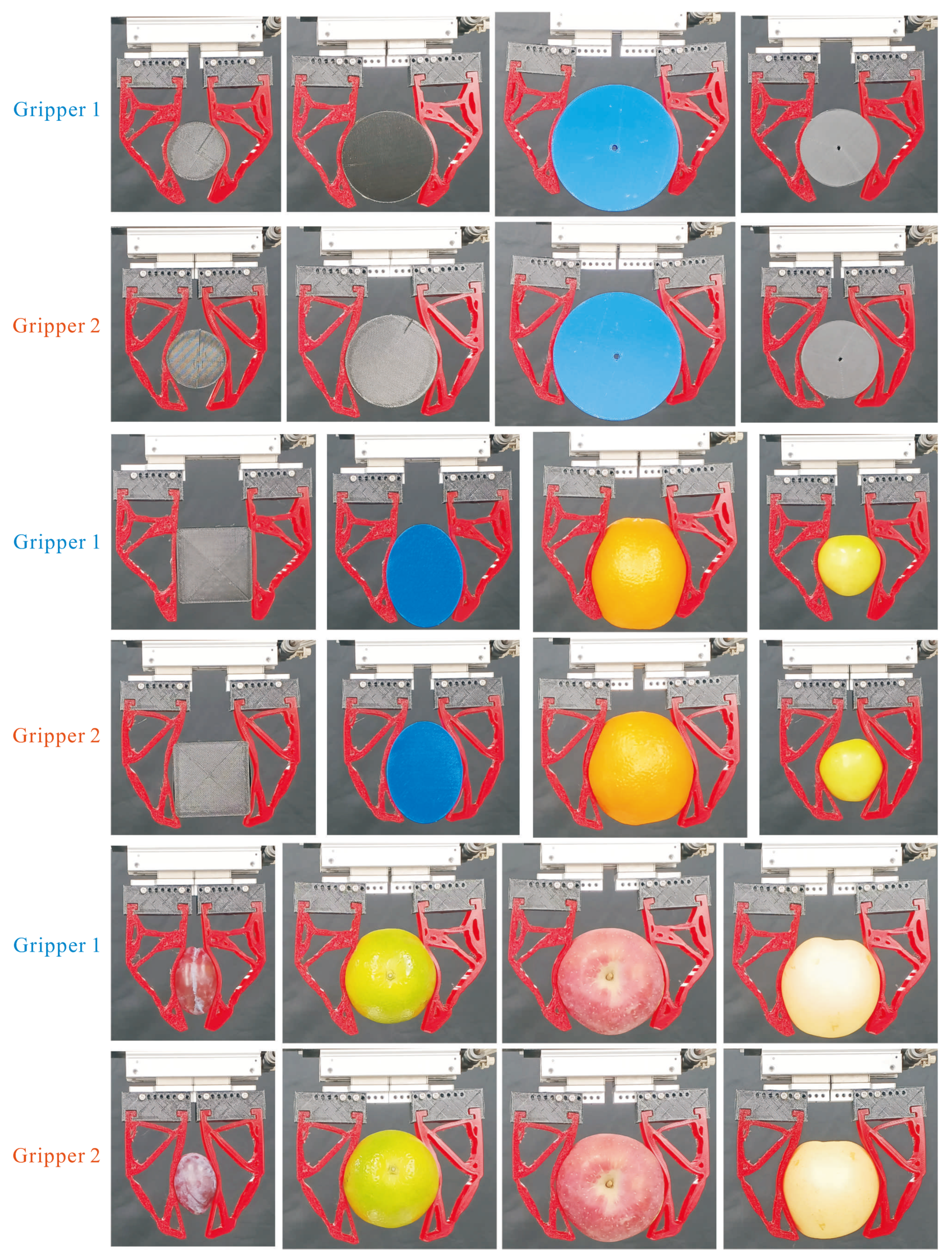
In this section, adaptive gripping performance, gripping stability, and maximum gripping weight of the grippers were assessed through prototype tests. The thickness of all the fingers were set to 20 mm. The fingers are mounted on a parallel gripper actuated by pressure.
Figure 16 shows the test results of translational grippers 1 and 2 in grasping objects with different shapes and size, respectively. Both grippers exhibit great shape adaptability and size adaptability, which agrees well with the simulation results. The findings indicate that relatively small fingers can effectively wrap around and grasp larger objects, highlighting the potential of the designed flexible fingers for diverse object-grasping applications. To further validate the adaptability and efficacy of the developed grippers, a variety of fruits, including oranges, apples, tangerines, and pears, were utilized as targets in grasping tests (as shown in Supplementary Movie S1). The results show that the soft gripper can successfully grasp these fruits of various shapes and sizes, highlighting the advantages of the designed flexible fingers in fruits picking. Moreover, the experimental results illustrate that translational gripper 2 with flexible finger 2 can stably grasp fruits without causing damage. The test results ( and 1.33) show that flexible finger 2 exhibits effective grasping of large-size objects during the test. Furthermore, gripper 2 consistently demonstrates good grasping stability in these scenarios. The above results not only reaffirm the effectiveness of the proposed design method, but also substantiate the necessity of incorporating contact stress constraints in flexible finger design, highlighting its practical applicability.
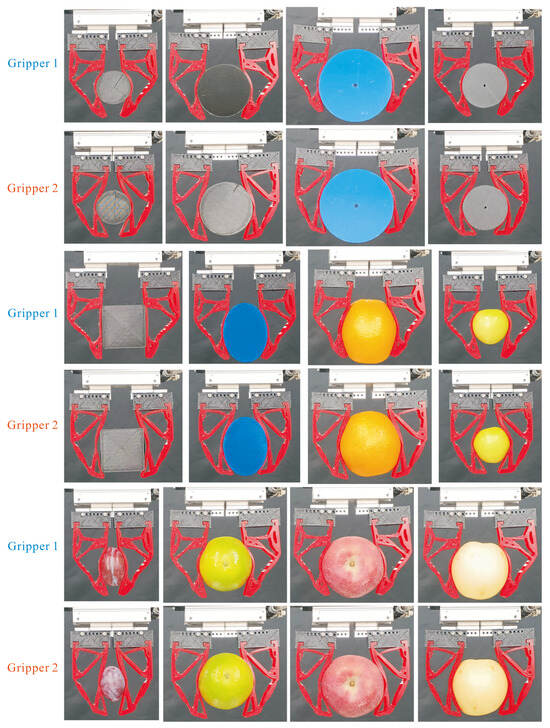
Figure 16.
The adaptive test results of translational grippers: grasping objects and fruits of different sizes and shapes.
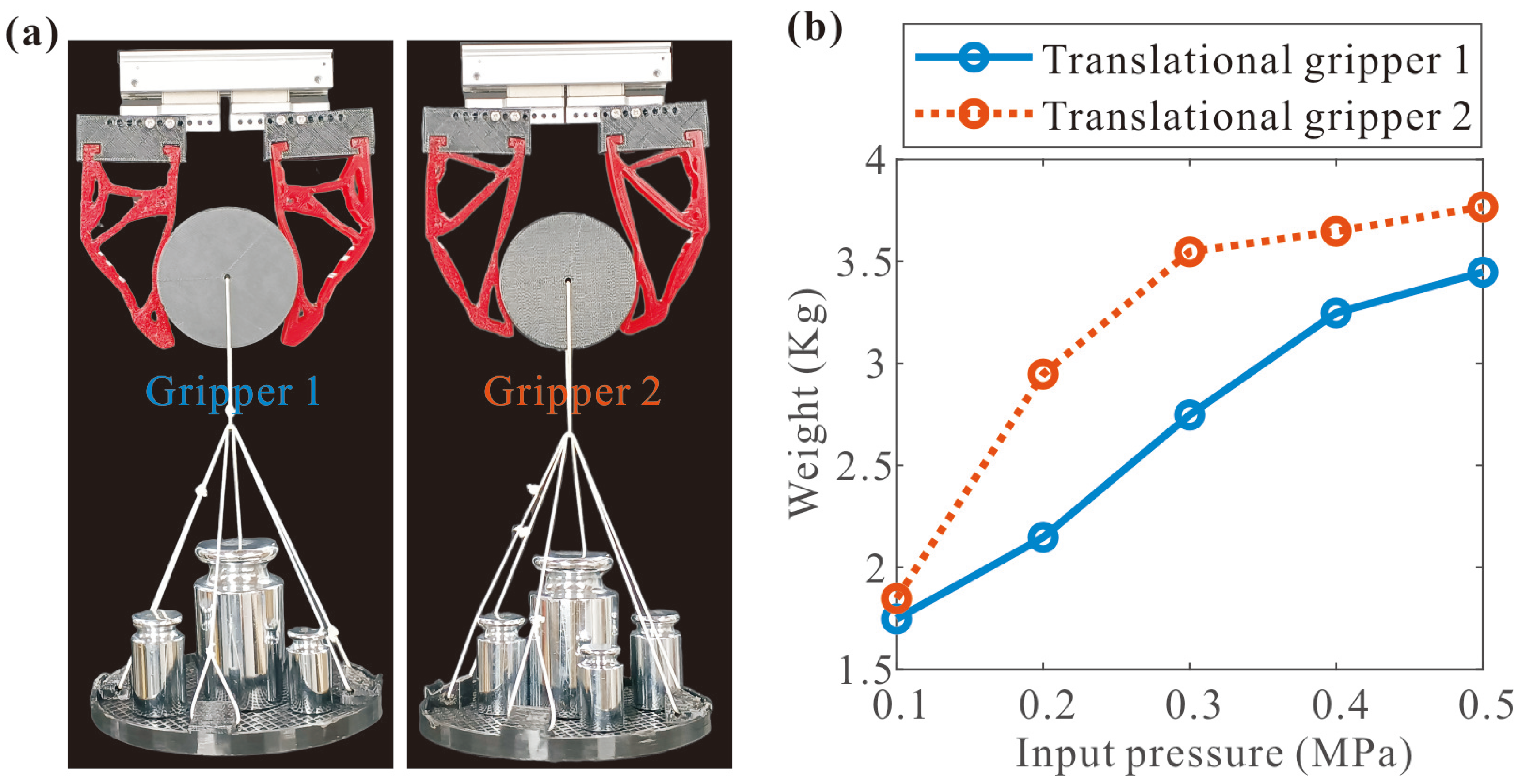
As shown in Figure 17a, the payload tests were conducted to assess the maximum allowable weight that the two translational grippers can carry. Figure 17b shows the experimental results depicting the maximum load capacity of the two flexible grippers under varying input pressures. It is noteworthy that higher input pressure leads to a larger payload, and as the input pressure increases, the payload of the grippers becomes less sensitive to pressure variations. At an input pressure of 0.5 MPa, gripper 1 achieves a maximum payload of 3.2 kg, while that of gripper 2 can reach 3.52 kg. Using the selected finger dimensions and parameters, the weights of gripper 1 and gripper 2 are 87.43 g and 84.41 g, respectively. This results in payload-to-weight ratios of 36.6:1 and 41.7:1, respectively. The high payload-to-weight ratios indicate that implementing flexible grippers on fruit-picking robots has the potential to reduce power consumption. It is important to note that the maximum payload is influenced by factors such as friction and the contact region between the gripper and an object. Consequently, the estimated maximum payload may vary for different objects with distinct materials, sizes, shapes, and surface conditions. The payload test validates gripper 2’s effectiveness and stability in gripping heavy objects.
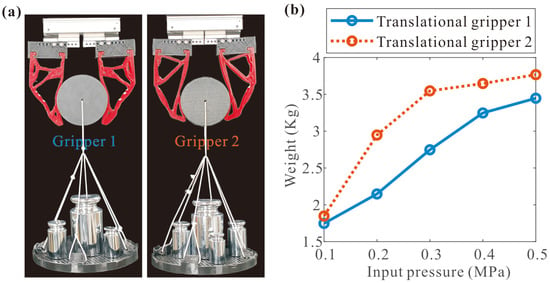
Figure 17.
(a) Maximum payload test of the translational grippers, (b) payload test results for different input pressures.
4. Conclusions
This paper proposes an adaptive finger structure with low contact stress, which has both good contact performance and adaptability. This study proposes a new method to the topology design of the above-mentioned structures and explores the effects of design parameters, including virtual spring stiffness, volume fraction, design domain size, and discretization, on the results of flexible fingers. Based on the above finger structure, flexible grippers with different driving modes are designed. These grippers maintain low contact stresses on their own and require no additional components, making them cost-effective and highly versatile. When grasping different fragile fruits, you only need to change the material and thickness of the finger to adjust its contact stress extreme value. The adaptable finger structures with low contact stress have broad potential application scenarios.
The results of this study indicate that topology optimization design parameters will affect the shape of the flexible finger, its degree of flexibility, the size of the internal beams, and the extremes of contact stress. The results of finite element and actual tests show that finger 2 has smaller contact stress and greater wrapping force than finger 1, confirming the effectiveness of the proposed design method. Based on these flexible fingers, six types of flexible grippers were developed, including translational grippers, angle grippers, and active grippers. A comparative analysis of these grippers using FEA evaluated their performance. Practical tests were conducted on the translational gripper 1 and gripper 2, including the evaluation of adaptive gripping performance, gripping stability and maximum gripping weight. The results show that the two designs of translational grippers show good adaptability in terms of shape and size. Gripper 2 with flexible finger 2 excels in contact stress and adaptive wrapping, making it well-suited for grasping unstructured and fragile objects. Overall, the proposed method provides valuable insights into the design of flexible grippers for fruit-picking robots and highlights the potential of the designed flexible grippers in agricultural harvesting applications.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/agriculture14071082/s1, Supplementary Movie S1.
Author Contributions
Conceptualization, B.X., M.J., J.D. and Z.Y.; methodology, B.X., M.J. and J.D.; software, B.X.; simulation, B.X.; validation, B.X., Z.L., W.W. and M.Q.; investigation, M.Q.; data curation, Z.L. and W.W.; writing—original draft preparation, B.X.; supervision, Z.Y.; project administration, Z.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Science and Technology Projects in Guangzhou (202201010310), the China Scholarship Council, the International Training Program for Outstanding Young Scientists in Universities in Guangdong Province (202301811-08), the China Agriculture Research System of MOF and MARA (No.CARS-31), and the open competition program of top ten critical priorities of Agricultural Science and Technology Innovation for the 14th Five-Year Plan of Guangdong Province (2022SDZG03).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available on request from the corresponding author. The data are not publicly available due to privacy or ethical restrictions.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wakchaure, M.; Patle, B.; Mahindrakar, A. Application of AI techniques and robotics in agriculture: A review. Artif. Intell. Life Sci. 2023, 3, 100057. [Google Scholar] [CrossRef]
- Ji, W.; He, G.; Xu, B.; Zhang, H.; Yu, X. A new picking pattern of a flexible three-fingered end-effector for apple harvesting robot. Agriculture 2024, 14, 102. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Sugirbay, A.; Sun, H.; Chen, J. Design and evaluation of a robotic apple harvester using optimized picking patterns. Comput. Electron. Agric. 2022, 198, 107092. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, F.; Zhang, J.; Guo, H.; Gao, J. Picking patterns evaluation for cherry tomato robotic harvesting end-effector design. Biosyst. Eng. 2024, 239, 1–12. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, Z.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Tian, M.; Zhang, Y. Research on flexible end-effectors with humanoid grasp function for small spherical fruit picking. Agriculture 2023, 13, 123. [Google Scholar] [CrossRef]
- Xie, B.; Jin, M.; Duan, J.; Yang, Z.; Xu, S.; Luo, Y.; Wang, H. Design and analysis of a flexible adaptive supporting device for banana harvest. Agronomy 2022, 12, 593. [Google Scholar] [CrossRef]
- Jo, Y.; Park, Y.; Son, H.I. A suction cup-based soft robotic gripper for cucumber harvesting: Design and validation. Biosyst. Eng. 2024, 238, 143–156. [Google Scholar] [CrossRef]
- Park, Y.; Seol, J.; Pak, J.; Jo, Y.; Jun, J.; Son, H.I. A novel end-effector for a fruit and vegetable harvesting robot: Mechanism and field experiment. Precis. Agric. 2023, 24, 948–970. [Google Scholar] [CrossRef]
- van Herck, L.; Kurtser, P.; Wittemans, L.; Edan, Y. Crop design for improved robotic harvesting: A case study of sweet pepper harvesting. Biosyst. Eng. 2020, 192, 294–308. [Google Scholar] [CrossRef]
- Vrochidou, E.; Tsakalidou, V.N.; Kalathas, I.; Gkrimpizis, T.; Pachidis, T.; Kaburlasos, V.G. An overview of end effectors in agricultural robotic harvesting systems. Agriculture 2022, 12, 1240. [Google Scholar] [CrossRef]
- Crooks, W.; Vukasin, G.; O’Sullivan, M.; Messner, W.; Rogers, C. Fin ray® effect inspired soft robotic gripper: From the robosoft grand challenge toward optimization. Front. Robot. AI 2016, 3, 70. [Google Scholar] [CrossRef]
- Au, W.; Zhou, H.; Liu, T.; Kok, E.; Wang, X.; Wang, M.; Chen, C. The Monash Apple Retrieving System: A review on system intelligence and apple harvesting performance. Comput. Electron. Agric. 2023, 213, 108164. [Google Scholar] [CrossRef]
- Wang, X.; Kang, H.; Zhou, H.; Au, W.; Wang, M.Y.; Chen, C. Development and evaluation of a robust soft robotic gripper for apple harvesting. Comput. Electron. Agric. 2023, 204, 107552. [Google Scholar] [CrossRef]
- Cai, S.; Tang, C.; Pan, L.; Bao, G.; Bai, W.; Yang, Q. Pneumatic webbed soft gripper for unstructured grasping. Int. J. Agric. Biol. Eng. 2021, 14, 145–151. [Google Scholar] [CrossRef]
- Cao, M.; Sun, Y.; Zhang, J.; Ying, Z. A novel pneumatic gripper driven by combination of soft fingers and bellows actuator for flexible grasping. Sens. Actuators A Phys. 2023, 355, 114335. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Au, W.; Kang, H.; Chen, C. Intelligent robots for fruit harvesting: Recent developments and future challenges. Precis. Agric. 2022, 23, 1856–1907. [Google Scholar] [CrossRef]
- Elfferich, J.F.; Dodou, D.; Della Santina, C. Soft robotic grippers for crop handling or harvesting: A review. IEEE Access 2022, 10, 75428–75443. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Saudabayev, A.; Varol, H.A. Sensors for robotic hands: A survey of state of the art. IEEE Access 2015, 3, 1765–1782. [Google Scholar] [CrossRef]
- Aoyagi, S.; Suzuki, M.; Morita, T.; Takahashi, T.; Takise, H. Bellows suction cup equipped with force sensing ability by direct coating thin-film resistor for vacuum type robotic hand. IEEE/ASME Trans. Mechatron. 2020, 25, 2501–2512. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, H.; Yuan, H.; Liang, B. A compliant adaptive gripper and its intrinsic force sensing method. IEEE Trans. Robot. 2021, 37, 1584–1603. [Google Scholar] [CrossRef]
- Xu, K.; Simaan, N. An investigation of the intrinsic force sensing capabilities of continuum robots. IEEE Trans. Robot. 2008, 24, 576–587. [Google Scholar] [CrossRef]
- Aloi, V.A.; Rucker, D.C. Estimating loads along elastic rods. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2867–2873. [Google Scholar]
- Zhang, Z.; Zhou, J.; Yi, B.; Zhang, B.; Wang, K. A flexible swallowing gripper for harvesting apples and its grasping force sensing model. Comput. Electron. Agric. 2023, 204, 107489. [Google Scholar] [CrossRef]
- Ji, W.; Tang, C.; Xu, B.; He, G. Contact force modeling and variable damping impedance control of apple harvesting robot. Comput. Electron. Agric. 2022, 198, 107026. [Google Scholar] [CrossRef]
- Lin, J.; Hu, Q.; Xia, J.; Zhao, L.; Du, X.; Li, S.; Chen, Y.; Wang, X. Non-destructive fruit firmness evaluation using a soft gripper and vision-based tactile sensing. Comput. Electron. Agric. 2023, 214, 108256. [Google Scholar] [CrossRef]
- Visentin, F.; Castellini, F.; Muradore, R. A soft, sensorized gripper for delicate harvesting of small fruits. Comput. Electron. Agric. 2023, 213, 108202. [Google Scholar] [CrossRef]
- Wang, D.; Jiang, C.; Gu, G. Modeling and Design of Lattice-Reinforced Pneumatic Soft Robots. IEEE Trans. Robot. 2023, 40, 606–623. [Google Scholar] [CrossRef]
- Kako, T.; Wang, Z.; Mori, Y.; Zhang, H.; Wang, Z. 3D Printable Origami-Inspired Pneumatic Soft Actuator with Modularized Design. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Washio, S.; Gilday, K.; Iida, F. Design and control of a multi-modal soft gripper inspired by elephant fingers. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 4228–4235. [Google Scholar]
- Sui, D.; Zhu, Y.; Zhao, S.; Wang, T.; Agrawal, S.K.; Zhang, H.; Zhao, J. A bioinspired soft swallowing gripper for universal adaptable grasping. Soft Robot. 2022, 9, 36–56. [Google Scholar] [CrossRef]
- Wooten, M.; Frazelle, C.; Walker, I.D.; Kapadia, A.; Lee, J.H. Exploration and inspection with vine-inspired continuum robots. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5526–5533. [Google Scholar]
- Shan, Y.; Zhao, Y.; Yu, H.; Pei, C.; Jin, Z.; Sun, Y. Design and Grasping Force Modeling for a Soft Robotic Gripper with Multi-stem Twining. J. Bionic Eng. 2023, 20, 2123–2134. [Google Scholar] [CrossRef]
- Wu, J.; Sigmund, O.; Groen, J.P. Topology optimization of multi-scale structures: A review. Struct. Multidiscip. Optim. 2021, 63, 1455–1480. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, X.; Zhang, H.; Liang, J.; Zang, H.; Li, H.; Wang, R. Design of compliant mechanisms using continuum topology optimization: A review. Mech. Mach. Theory 2020, 143, 103622. [Google Scholar] [CrossRef]
- Sigmund, O. On the design of compliant mechanisms using topology optimization. J. Struct. Mech. 1997, 25, 493–524. [Google Scholar] [CrossRef]
- Liu, C.H.; Chen, Y.; Yang, S.Y. Topology optimization and prototype of a multimaterial-like compliant finger by varying the infill density in 3D printing. Soft Robot. 2022, 9, 837–849. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Chen, F.; Fuh, J.Y.; Wang, M.Y. Topology optimized multimaterial soft fingers for applications on grippers, rehabilitation, and artificial hands. IEEE/ASME Trans. Mechatron. 2018, 24, 120–131. [Google Scholar] [CrossRef]
- Wang, N.; Guo, H.; Chen, B.; Cui, C.; Zhang, X. Integrated design of actuation and mechanism of dielectric elastomers using topology optimization based on fat Bezier curves. Soft Robot. 2019, 6, 644–656. [Google Scholar] [CrossRef]
- Chen, F.; Wang, M.Y. Design optimization of soft robots: A review of the state of the art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Li, D.; Chen, S.; Song, Z.; Liang, J.; Zhu, X.; Chen, F. Tailoring the in-plane and out-of-plane stiffness of soft fingers by endoskeleton topology optimization for stable grasping. Sci. China Technol. Sci. 2023, 66, 3080–3089. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Fuh, J.Y.H.; Wang, M.Y. Design and development of a topology-optimized three-dimensional printed soft gripper. Soft Robot. 2018, 5, 650–661. [Google Scholar] [CrossRef]
- Pinskier, J.; Howard, D. From bioinspiration to computer generation: Developments in autonomous soft robot design. Adv. Intell. Syst. 2022, 4, 2100086. [Google Scholar] [CrossRef]
- Liu, C.H.; Chiu, C.H.; Hsu, M.C.; Chen, Y.; Chiang, Y.P. Topology and size–Shape optimization of an adaptive compliant gripper with high mechanical advantage for grasping irregular objects. Robotica 2019, 37, 1383–1400. [Google Scholar] [CrossRef]
- Liu, C.H.; Hsu, M.C.; Chen, Y.; Chen, W.T.; Chen, T.L. A topology-optimized 3D printed compliant finger with flex sensor for adaptive grasping of unknown objects. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 92–97. [Google Scholar]
- Liu, C.H.; Hsu, M.C.; Chen, T.L.; Chen, Y. Optimal design of a compliant constant-force mechanism to deliver a nearly constant output force over a range of input displacements. Soft Robot. 2020, 7, 758–769. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.H.; Chung, F.M.; Chen, Y.; Chiu, C.H.; Chen, T.L. Optimal design of a motor-driven three-finger soft robotic gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Huang, J.; Wei, Z.; Cui, Y.; Liu, J. Clamping force manipulation in 2D compliant gripper topology optimization under frictionless contact. Struct. Multidiscip. Optim. 2023, 66, 164. [Google Scholar] [CrossRef]
- Bourdin, B. Filters in topology optimization. Int. J. Numer. Methods Eng. 2001, 50, 2143–2158. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, X.; Zhu, B. A 213-line topology optimization code for geometrically nonlinear structures. Struct. Multidiscip. Optim. 2019, 59, 1863–1879. [Google Scholar] [CrossRef]
- Svanberg, K. The method of moving asymptotes—A new method for structural optimization. Int. J. Numer. Methods Eng. 1987, 24, 359–373. [Google Scholar] [CrossRef]
- Li, Y.; Du, X.; Wang, J.; Lei, C. Study on mechanical properties of apple picking damage. In Proceedings of the 2017 3rd International Forum on Energy, Environment Science and Materials (IFEESM 2017), Shenzhen, China, 25–26 November 2017; Atlantis Press: Amsterdam, The Netherlands, 2018; pp. 1666–1670. [Google Scholar]
- An, X.; Li, Z.; Zude-Sasse, M.; Tchuenbou-Magaia, F.; Yang, Y. Characterization of textural failure mechanics of strawberry fruit. J. Food Eng. 2020, 282, 110016. [Google Scholar] [CrossRef]
- Jentzsch, M.; Badstöber, M.C.; Umlas, F.; Speck, T. Damage protection in fruits: Comparative analysis of the functional morphology of the fruit peels of five Citrus species via quasi-static compression tests. Front. Mater. 2022, 9, 979151. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).