
Design and Experimental Study of Banana Bunch Transportation Device with Lifting Mechanism and Automatic Bottom-Fixing Fruit Shaft

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Planting Characteristics and Morphological Parameters of Banana Bunches
2.2. Overall Structure and Working Principle
2.2.1. Overall Structure
2.2.2. Working Principle
2.3. Design of Banana Bunch Transportation Mechanism
2.3.1. Anti-Overturning Design
2.3.2. Design of Lifting Mechanism
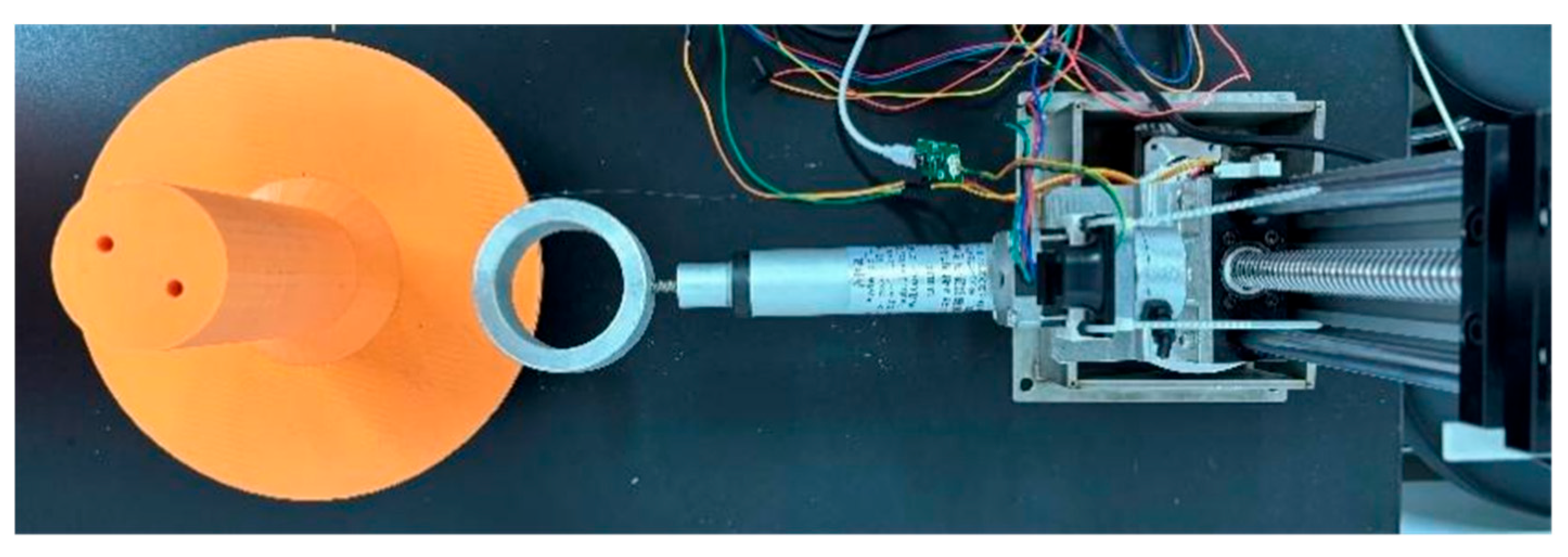
2.3.3. Design of Fruit Shaft Bottom-Fixation Mechanism
2.4. Control System Design
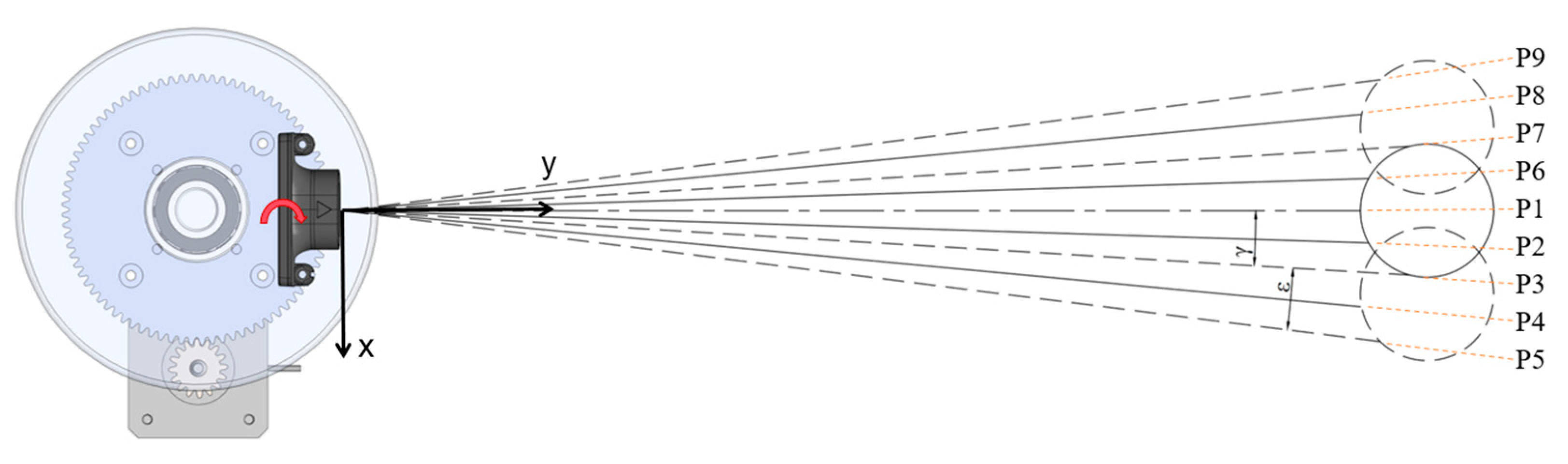
2.4.1. Scanning Distance Information Detection System
2.4.2. Fruit Shaft Bottom Recognition and Center Position Acquisition Method
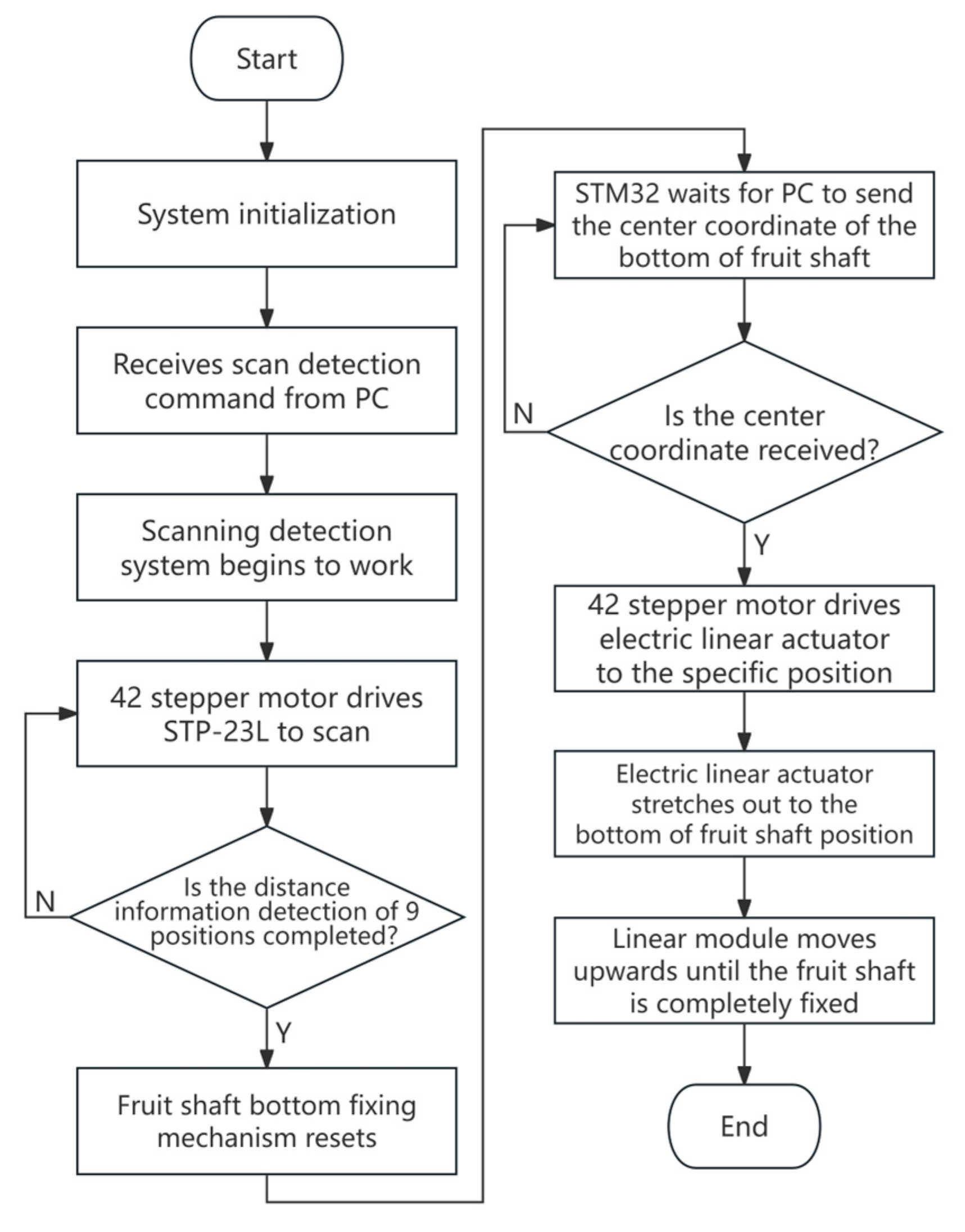
2.4.3. Automatically Fixed Fruit Shaft Bottom-Control System
2.5. Field Test
2.5.1. Experimental Conditions
2.5.2. Experimental Method
- (1)
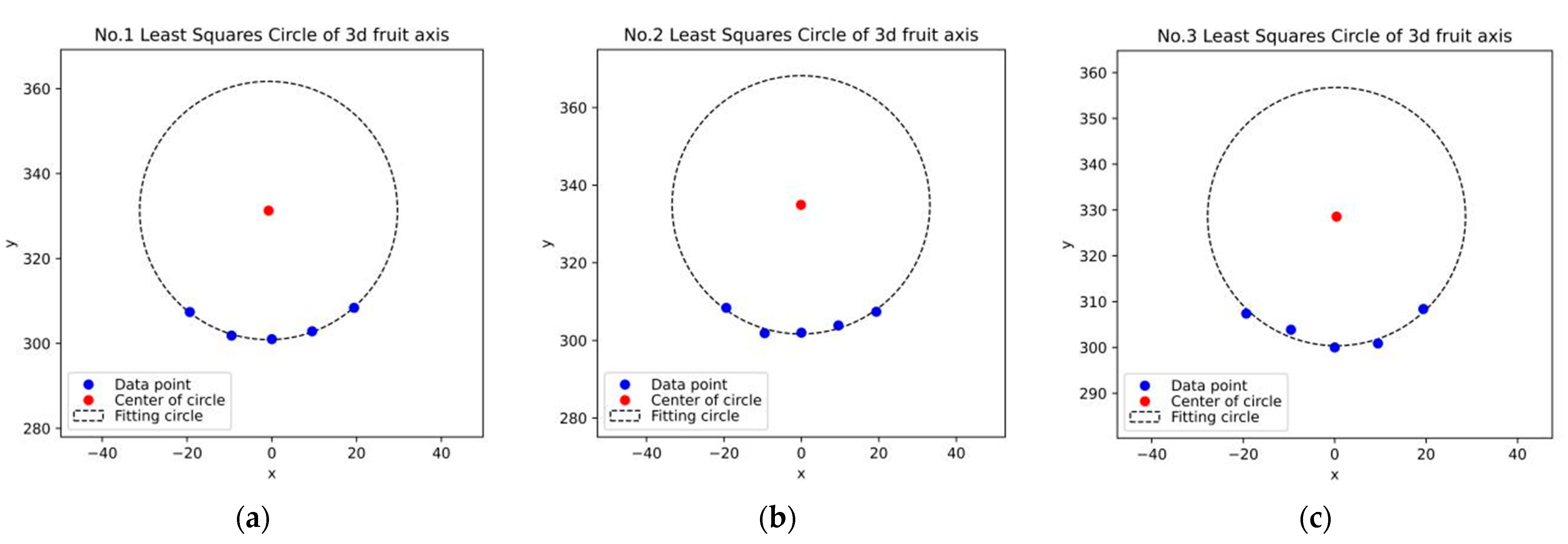
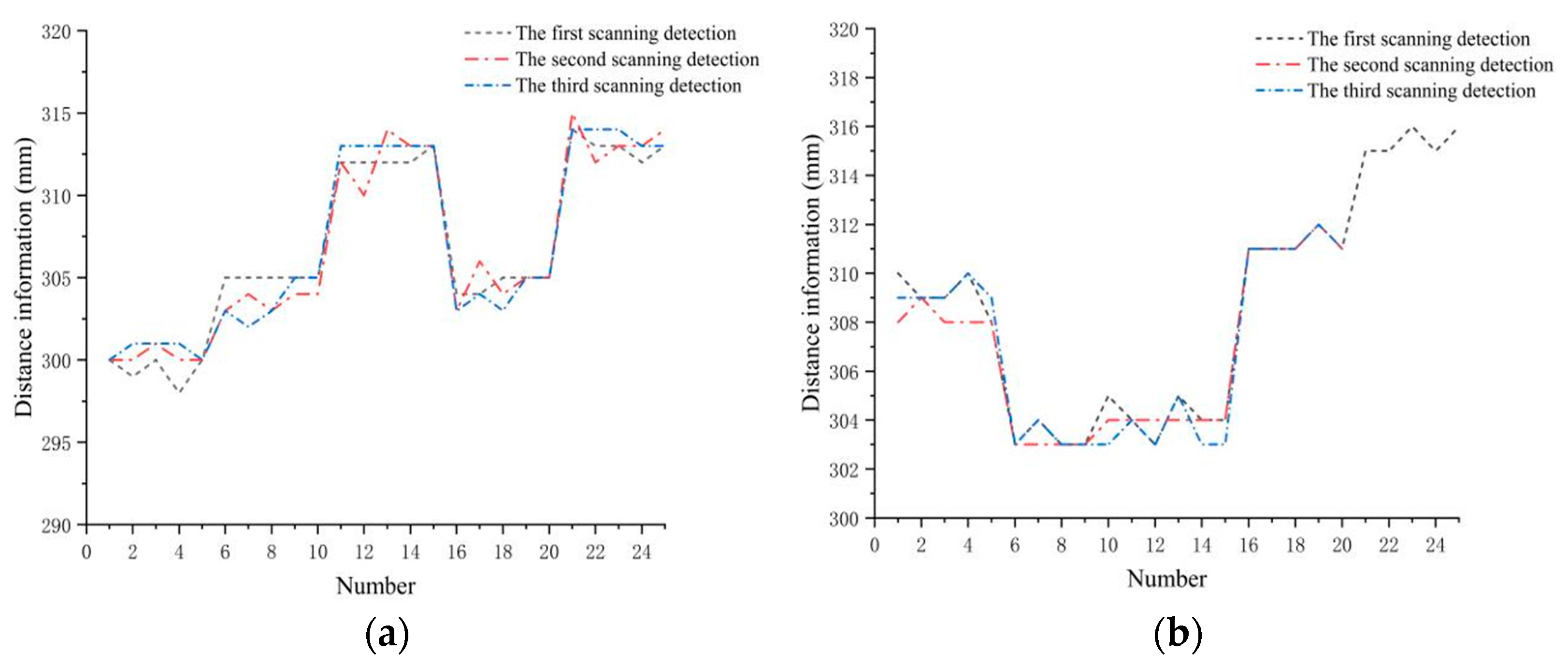
- To investigate the performance of the scanning distance information detection system in identifying the bottom and center of a fruit shaft, a 3D-printed replica of a 30 mm radius fruit axis was positioned 300 mm away from the STP-23L distance measurement module. The system conducted three independent scanning experiments on the mock fruit shaft. Employing the least-squares method, the coordinates obtained from the surface scanning were fitted to a circle, resulting in the estimated radius and center coordinates. The error between the fitted radius and the actual one was calculated using the following equation:
- (2)
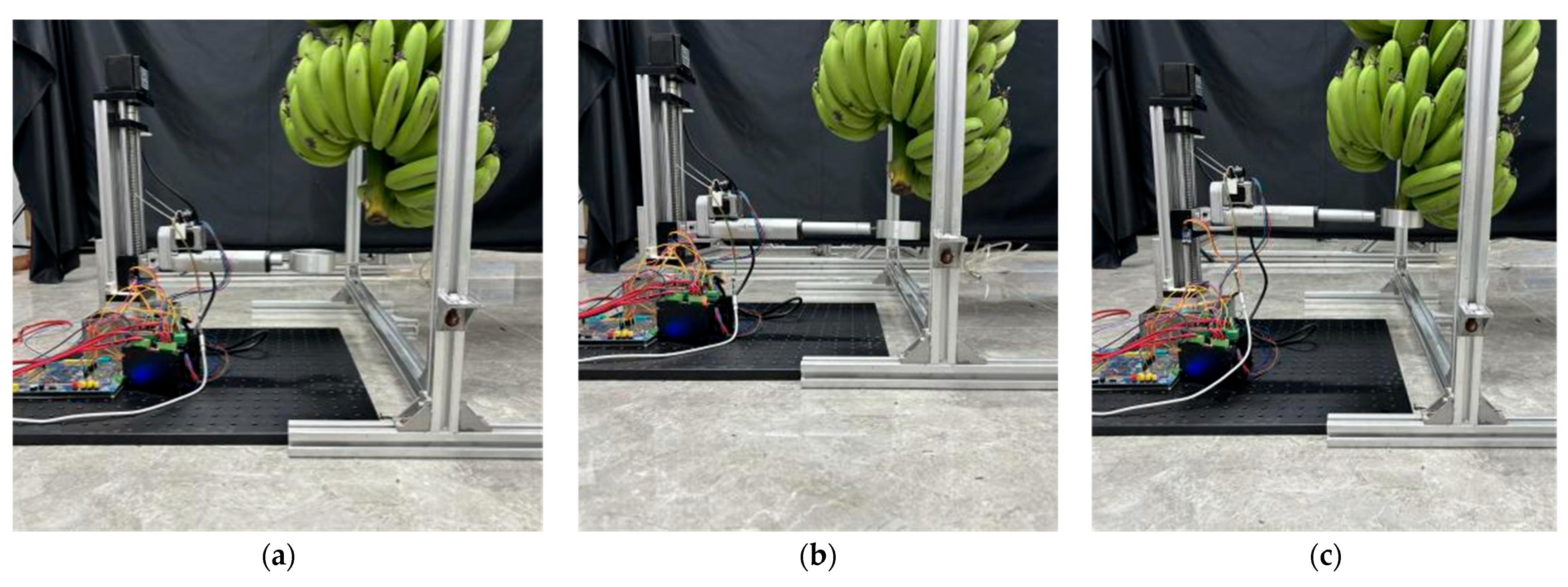
- To evaluate the performance of the fruit shaft bottom-fixation mechanism, it was mounted on a flat surface. This study involved dividing four banana bunches into four groups, with each group subjected to distinct fixation scenarios: one where the fruit shaft bottom was aligned with the mechanism and another where the rope knot of the suspended bunches was offset by 20 mm to the right. For each condition, three trials were conducted horizontally, and the success rate of fruit stalk bottom fixation was determined. The equation for calculating this success rate is as follows:
- (3)
- To assess the stability of the transportation device against overturning, it was tested with full loads on one side, traveling slopes both longitudinally and laterally. To evaluate the impact of the fruit shaft bottom-fixation mechanism on banana bunch transportation, a field test was conducted, comparing the stability of field transportation with a fixed shaft bottom to that without fixation.
- (4)
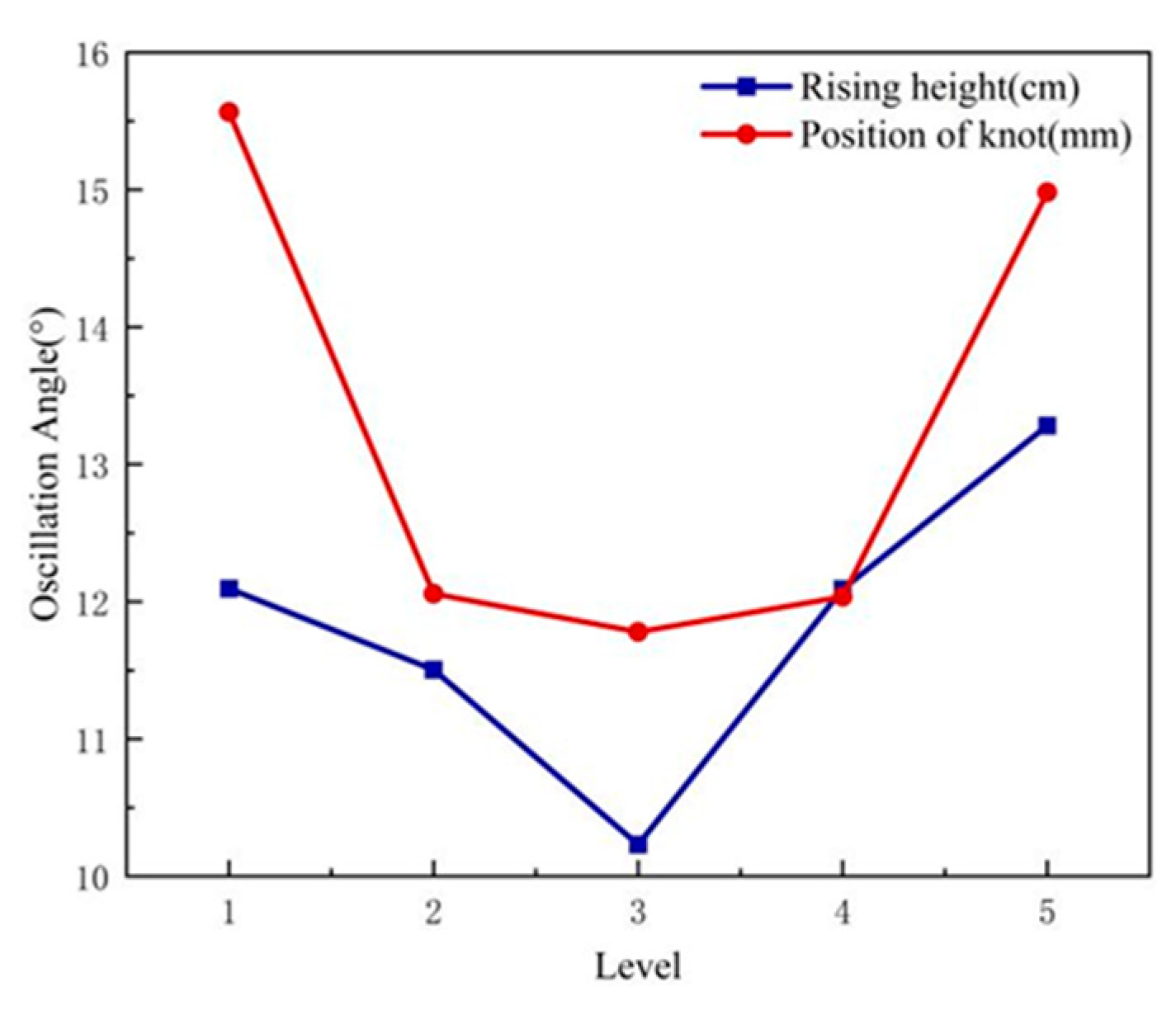
- High-speed continuous shooting with the EOS R6 Mark II was employed to measure the banana bunch oscillation angle during the initial stage of the transportation device. To minimize the oscillation angle and thereby reduce collision probabilities and impacts on the fruit shaft bottom-fixation mechanism, a multifactorial experiment was conducted, varying the maximum travel speed of the device, the distance between the rope knot and the top of the shaft, and the height at which the bunches were raised. Considering both the transport efficiency of the banana bunches and the performance of the walking mechanism, an operational speed range of 3 km/h to 5 km/h of the device was selected. In the preliminary single-factor experiments, the range of the rising height for the banana bunch was set at 80 cm to 92 cm, and the distance between the rope knot and the top of the shaft was within the range of 100 mm to 220 mm, as detailed in Table 3 showing the coding of the single-factor experimental levels.
3. Results
3.1. Performance Test of Scanning Distance Detection System
3.2. Field Performance Test of Fruit Shaft Bottom-Fixation Mechanism
3.3. Test Results and Analysis of Operation Stability of Banana Bunch Conveying Mechanism
3.4. Comparative Test Results and Analysis of Banana Bunch Transportation Stability
3.5. Analysis of Single-Factor Experiments
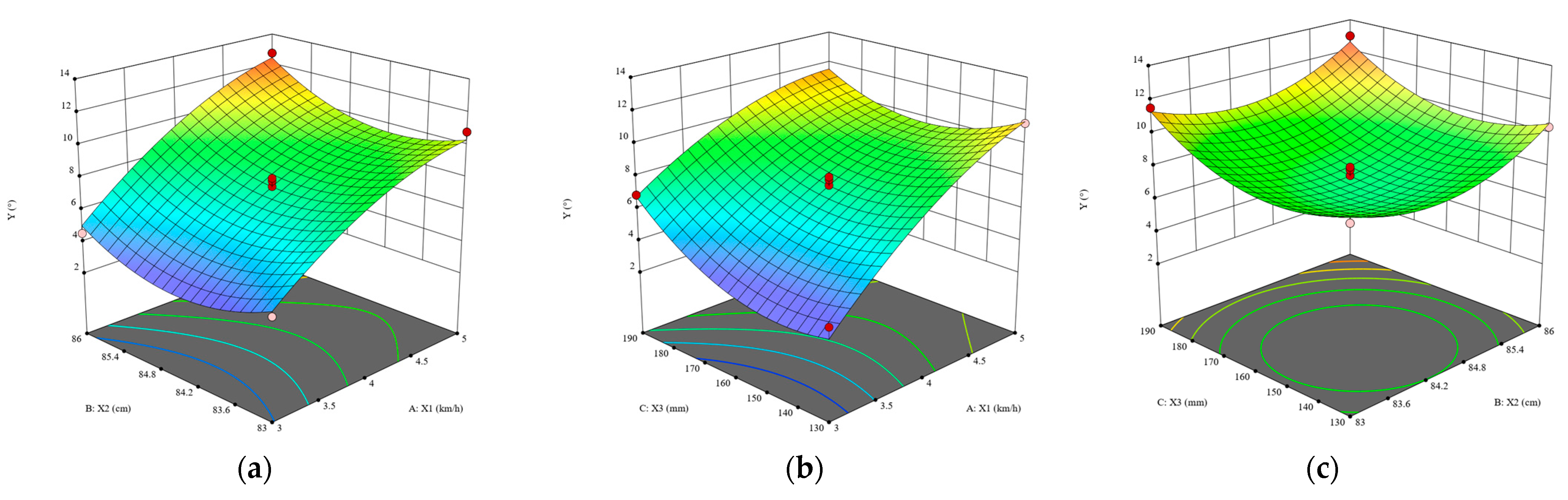
3.6. Multivariate Test Results and Analysis of Variance
4. Conclusions
- (1)
- Using the dynamics simulation in Solidworks Motion, the maximum angular acceleration of the bunch during startup was determined to be 5.394 rad/s2. Based on this value and the gear ratio, 42BYGH47 was selected for controlling the rotation of the fruit shaft bottom-fixation mechanism.
- (2)
- In the conducted field trials, the surface coordinates of the multi-point scanning for the simulated fruit shaft were successfully fitted into a circle, with an error margin of less than 15% between the derived parameters and the actual ones. This outcome is well within the acceptable error range of the shaft bottom-fixing mechanism. The positioning accuracy for the shaft bottom center and the automatic fixation success rate of the fixation mechanism reached 95.83%, indicating a satisfactory fixation performance. The overall system’s field test validated the robustness of the transportation device against overturning. Comparative trials between fixed and non-fixed banana bunches underscored the significance of securing the shaft bottom during the banana bunch transportation process.
- (3)
- To enhance the durability of the bottom-fixation mechanism for the fruit shaft, a multi-factor experiment was employed to identify the optimal parameter combination under the conditions of maximum transportation efficiency and minimum oscillation angle. The rope knot was tied 160 mm from the top of the fruit shaft, and the rising height of the banana bunches was measured at 84 cm. The results of the response surface analysis showed a 5.93% error in comparison to field trials, indicating the reliability of the response surface analysis model. Furthermore, the designed device complies with the horticultural requirements of banana orchards. This study provides valuable theoretical guidance and practical insights for the development of banana bunch transportation mechanisms in orchards.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Nascimento, R.E.A.; Carvalheira, M.; Crespo, J.G.; Neves, L.A. Extraction and Characterization of Cellulose Obtained from Banana Plant Pseudostem. Clean Technol. 2023, 5, 1028–1043. [Google Scholar] [CrossRef]
- Aher, R.; Dethe, A.; Chavhan, R.; Hinge, V.; Dhutraj, S. Molecular elucidation of sigatoka disease resistance in diverse banana (Musa spp.) genotypes using molecular markers and genetic diversity analysis. Sci. Hortic. 2024, 336, 113446. [Google Scholar] [CrossRef]
- Ahmad, T.; Danish, M. Prospects of banana waste utilization in wastewater treatment: A review. J. Environ. Manag. 2018, 206, 330–348. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, Z.; Xu, X.; Xie, B.; Duan, J. Spreading model of single droplet impacting the banana leaf surface and computational fluid dynamics simulation analysis. Comput. Electron. Agric. 2024, 223, 109113. [Google Scholar] [CrossRef]
- Choudhury, N.; Nickhil, C.; Deka, S.C. Comprehensive review on the nutritional and therapeutic value of banana by-products and their applications in food and non-food sectors. Food Biosci. 2023, 56, 103416. [Google Scholar] [CrossRef]
- Arunima, P.L.; Gopinath, P.P.; Lekshmi, P.G.; Esakkimuthu, M. Digital assessment of post-harvest Nendran banana for faster grading: CNN-based ripeness classification model. Postharvest Biol. Technol. 2024, 214, 112972. [Google Scholar] [CrossRef]
- Velame, K.V.C.; Rocha, A.D.J.; Ferreira, M.D.S.; Haddad, F.; Amorim, V.B.O.; Pestana, K.N.; Ferreira, C.F.; de Oliveira, S.A.S.; Amorim, E.P. Evidence of Correlation between Pathogenicity, Avirulence Genes, and Aggressiveness of Fusarium oxysporum f. sp. cubense in Banana “Cavendish” and “Prata” Subgroups. Horticulturae 2024, 10, 228. [Google Scholar] [CrossRef]
- Ma, C.; Zhang, Q.; Lv, D.-Z.; Song, J.; Fan, Q.; Tian, H.; Wang, M.-Y. Study of Factors Influencing the Oral Bioaccessibility of Commonly Used and Detected Pesticides in Bananas and Mangoes Based on in vitro Methods. Foods 2024, 13, 2019. [Google Scholar] [CrossRef]
- Opara, U.L.; Pathare, P.B. Bruise damage measurement and analysis of fresh horticultural produce—A review. Postharvest Biol. Technol. 2014, 91, 9–24. [Google Scholar] [CrossRef]
- Jahanbakhshi, A.; Yeganeh, R.; Shahgoli, G. Determination of Mechanical Properties of Banana Fruit under Quasi-Static Loading in Pressure, Bending, and Shearing Tests. Int. J. Fruit Sci. 2020, 20, 314–322. [Google Scholar] [CrossRef]
- Al-Dairi, M.; Pathare, P.B.; Al-Yahyai, R.; Jayasuriya, H.; Al-Attabi, Z. Evaluation of chemical quality attributes in bruised bananas during storage. Food Sci. Technol. 2024, 197, 115904. [Google Scholar] [CrossRef]
- Al-Dairi, M.; Pathare, P.B.; Al-Yahyai, R.; Jayasuriya, H.; Al-Attabi, Z. Postharvest quality, technologies, and strategies to reduce losses along the supply chain of banana: A review. Trends Food Sci. Technol. 2023, 134, 177–191. [Google Scholar] [CrossRef]
- Li, D. Postharvest commercialization treatment technology of banana. China Trop. Agric. 2006, 40–41. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Y.; Shen, Y.; Cheng, L.; Qiao, J. The role of multi-category subsidies in cultivated land transfer decision-making of rural households in China: Synergy or trade-off. Appl. Geogr. 2023, 160, 103096. [Google Scholar] [CrossRef]
- Albiero, D.; Pontin Garcia, A.; Kiyoshi Umezu, C.; de Paulo, R.L. Swarm robots in mechanized agricultural operations: A review about challenges for research. Comput. Electron. Agric. 2022, 193, 106608. [Google Scholar] [CrossRef]
- Li, J.; Li, S.; Zhang, Y.; Liu, M.; Gao, Z. Development and test of hydraulic driven remote transporter. Int. J. Agric. Biol. Eng. 2021, 14, 72–80. [Google Scholar] [CrossRef]
- Saheb, M.; Morteza, A.; Arjang, J. Applying multi-criteria decision making method to analyze stability and mechanization patterns in small farms. Environ. Sustain. Indic. 2023, 20, 100295. [Google Scholar] [CrossRef]
- Guo, J.; Duan, J.; Li, J.; Yang, Z. Mechanized Technology Research and Equipment Application of Banana Post-Harvesting: A Review. Agronomy 2020, 10, 374. [Google Scholar] [CrossRef]
- Wang, Y. Research on Key Technology of Harvesting Machine in Flat Banana Plantation. Master’s Thesis, South China Agricultural University, Guangzhou, China, 2019. [Google Scholar]
- Yan, L.; Yang, Z.; Li, J.; Chen, C. Design and Test of Trailer Frame for Banana Conveying. J. Agric. Mech. Res. 2013, 35, 168–170. [Google Scholar]
- Yang, Z.; Li, J.; Wang, W.; Zheng, S.; Ding, L.; Xu, G. An Electric Banana Delivery System. CN201110333965.9, 20 June 2012. [Google Scholar]
- Zhu, L.; Li, Z.; Ma, Z.; Liu, S. Design and manufacture of wheeling trolley for banana transportation. J. Zhongkai Univ. Agric. Eng. 2016, 29, 1–4. [Google Scholar]
- Ren, W. Development of Small Tracked Vehicle for Banana Transportation in Field. Master’s Thesis, Zhongkai University of Agriculture and Engineering, Guangzhou, China, 2016. [Google Scholar]
- Shafaei, S.M.; Mousazadeh, H. Experimental comparison of locomotion system performance of ground mobile robots in agricultural drawbar works. Smart Agric. Technol. 2023, 3, 100131. [Google Scholar] [CrossRef]
- Fonseca, D.J.; Uppal, G.; Greene, T.J. A knowledge-based system for conveyor equipment selection. Expert Syst. Appl. 2004, 26, 615–623. [Google Scholar] [CrossRef]
- de Magalhães, M.J.M.; Abrahão, R.F.; Leal, P.A.M. Manual transportation within the plot and physical damages to bananas. Sci. Agric. 2004, 61, 32–35. [Google Scholar] [CrossRef]
- Geng, D.Y.; Sun, Y.C.; Li, H.B.; Mou, X.D.; Zhang, G.D.; Wang, Z.Y.; Lu, X. Design and experiment of crawler corn harvester for sloping fields. Trans. Chin. Soc. Agric. Eng. 2021, 37, 11–19. [Google Scholar]
- Valdés-Hernández, P.A.; Martínez-Rodríguez, A.; Suárez-Hernández, J.; Gómez-Águila, M.V. Theoretical Model of a Transportation System for Banana Bunches (Clusters) in Hillsides. Rev. Cienc. Técnicas Agropecu. 2018, 27, 1g+. [Google Scholar]
- Li, J.; Yang, Z.; Lu, H.; Lin, J.; Yan, L.; Guo, J. Dynamics of Electric Pulley Conveying Cableway System in Banana Plantation. Trans. Chin. Soc. Agric. Mach. 2013, 44, 211–216. [Google Scholar]
- Zhou, D.; Guo, Y.; Yang, J.; Zhang, Y. Study on the Parameter Influences of Gear Tooth Profile Modification and Transmission Error Analysis. Machines 2024, 12, 316. [Google Scholar] [CrossRef]
- Jiang, Z.; Gao, P.; Hong, Z. Application Research of Miniature Stepper Motor Model Selection. Mech. Electr. Eng. Technol. 2016, 45, 135–137. [Google Scholar]
- Jiang, Y.; Duan, J.; Xu, X.; Ding, Y.; Li, Y.; Yang, Z. Measurement of the banana pseudo-stem phenotypic parameters based on ellipse model. Int. J. Agric. Biol. Eng. 2022, 15, 195–202. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Range | Mean Value |
|---|---|---|
| Weight m/kg | 17.84–35.64 | 24.49 |
| Banana bunch maximum diameter dmax/cm | 40–56 | 51.22 |
| Banana bunch length L/cm | 69.5–129.0 | 94.8 |
| Fruit shaft top diameter d1/mm | 57.84–71.30 | 69.47 |
| Fruit shaft bottom diameter d2/mm | 32.68–47.66 | 42.39 |
| Bottom of fruit shaft to tail pectinate distance banana h1/mm | 26–42 | 31.95 |
| Bending degree α/(°) | 2.2–3.9 | 2.77 |
| Technical Parameter | Value |
|---|---|
| Overall dimension (Length × Width × Height)/mm | 1700 × 1500 × 2200 |
| banana bunches suspension spacing/mm | 550 |
| Lifting range of the lifting mechanism/mm | 0–1500 |
| Rated power of lifting mechanism motor/W | 1000 |
| Electric telescopic rod extension range/mm | 0–150 |
| Linear module motion range/mm | 0–200 |
| Rated power of sprocket motor/W | 1500 |
| Maximum payload/kg | 1000 |
| Level Codes | Rising Height (cm) | Position of Knot (mm) |
|---|---|---|
| 1 | 80 | 100 |
| 2 | 83 | 130 |
| 3 | 86 | 160 |
| 4 | 89 | 190 |
| 5 | 92 | 220 |
| Factors | Codes | Level Codes | ||
|---|---|---|---|---|
| −1 | 0 | 1 | ||
| Maximum speed (km/h) | X1 | 2.9–3.1 | 3.9–4.1 | 4.9–5.1 |
| Rising height (cm) | X2 | 83 | 86 | 89 |
| Position of knot (mm) | X3 | 130 | 160 | 190 |
| Number | Fitting Center Coordinate | Fitting Circle Radius (mm) | Relative Error/δ (%) |
|---|---|---|---|
| 1 | (−0.752, 331.294) | 30.409 | 1.363 |
| 2 | (−0.102, 334.993) | 33.279 | 10.93 |
| 3 | (0.427, 328.554) | 28.179 | 6.07 |
| Banana Bunch Number | Standard Deviation of Fitted Circle Coordinate without Offset (x, y) | Standard Deviation of Fitted Circle Coordinates with Offset (x, y) | Number of Failures | Success Rate (%) |
|---|---|---|---|---|
| 1 | (0.202, 0.825) | (5.395, 14.008) | 1 | 83.33 |
| 2 | (0.225, 1.600) | (0.164, 2.347) | 0 | 100 |
| 3 | (0.075, 0.339) | (0.189, 1.529) | 0 | 100 |
| 4 | (0.876, 2.749) | (0.446, 1.919) | 0 | 100 |
| Run | Factors | Performance Indicators | ||
|---|---|---|---|---|
| Maximum Speed X1/(km/h) | Rising Height X2/(cm) | Position of Knot X3/(mm) | Oscillation Angle Y/(°) | |
| 1 | −1 | 0 | 1 | 6.875 |
| 2 | 0 | 1 | 1 | 12.953 |
| 3 | 1 | −1 | 0 | 10.828 |
| 4 | 1 | 1 | 0 | 12.743 |
| 5 | 0 | −1 | 1 | 11.523 |
| 6 | 0 | 0 | 0 | 7.228 |
| 7 | 0 | 0 | 0 | 7.824 |
| 8 | −1 | 1 | 0 | 4.528 |
| 9 | 0 | 0 | 0 | 7.475 |
| 10 | −1 | −1 | 0 | 4.191 |
| 11 | 0 | −1 | −1 | 8.869 |
| 12 | −1 | 0 | −1 | 3.564 |
| 13 | 1 | 0 | −1 | 11.251 |
| 14 | 0 | 0 | 0 | 6.853 |
| 15 | 1 | 0 | 1 | 10.875 |
| 16 | 0 | 0 | 0 | 8.119 |
| 17 | 0 | 1 | −1 | 10.394 |
| Source | Square Sum | Degree of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Regression Model | 133.56 | 9 | 14.84 | 35.29 | <0.0001 ** |
| X1 | 88.04 | 1 | 88.04 | 209.34 | <0.0001 ** |
| X2 | 3.39 | 1 | 3.39 | 8.06 | 0.0251 ** |
| X3 | 8.30 | 1 | 8.30 | 19.73 | 0.0030 ** |
| X1X2 | 0.6225 | 1 | 0.6225 | 1.48 | 0.2632 |
| X1X3 | 3.40 | 1 | 3.40 | 8.08 | 0.0249 * |
| X2X3 | 0.0023 | 1 | 0.0023 | 0.0054 | 0.9437 |
| X12 | 5.19 | 1 | 5.19 | 12.34 | 0.0098 ** |
| X22 | 11.93 | 1 | 11.93 | 28.36 | 0.0011 ** |
| X32 | 12.92 | 1 | 12.92 | 30.73 | 0.0009 ** |
| Residual | 2.94 | 7 | |||
| Lack of Fit | 1.96 | 3 | 0.6542 | 2.67 | 0.1835 |
| Error | 0.9814 | 4 | 0.2453 | ||
| Sum | 136.51 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Yang, Z.; Xu, X.; Li, W.; Mo, X.; Yu, J.; Duan, J. Design and Experimental Study of Banana Bunch Transportation Device with Lifting Mechanism and Automatic Bottom-Fixing Fruit Shaft. Agriculture 2024, 14, 1161. https://doi.org/10.3390/agriculture14071161
Li W, Yang Z, Xu X, Li W, Mo X, Yu J, Duan J. Design and Experimental Study of Banana Bunch Transportation Device with Lifting Mechanism and Automatic Bottom-Fixing Fruit Shaft. Agriculture. 2024; 14(7):1161. https://doi.org/10.3390/agriculture14071161
Chicago/Turabian StyleLi, Weiqin, Zhou Yang, Xing Xu, Weixi Li, Xingkang Mo, Jiaxiang Yu, and Jieli Duan. 2024. "Design and Experimental Study of Banana Bunch Transportation Device with Lifting Mechanism and Automatic Bottom-Fixing Fruit Shaft" Agriculture 14, no. 7: 1161. https://doi.org/10.3390/agriculture14071161
APA StyleLi, W., Yang, Z., Xu, X., Li, W., Mo, X., Yu, J., & Duan, J. (2024). Design and Experimental Study of Banana Bunch Transportation Device with Lifting Mechanism and Automatic Bottom-Fixing Fruit Shaft. Agriculture, 14(7), 1161. https://doi.org/10.3390/agriculture14071161