
Design of Adaptive Grippers for Fruit-Picking Robots Considering Contact Behavior

 ,
,  ,
,
Abstract
:1. Introduction
- (1)
- Establishing a flexible gripper topology design method that considers contact behavior, and analyzing the impact of topology design parameters on the design process and final results.
- (2)
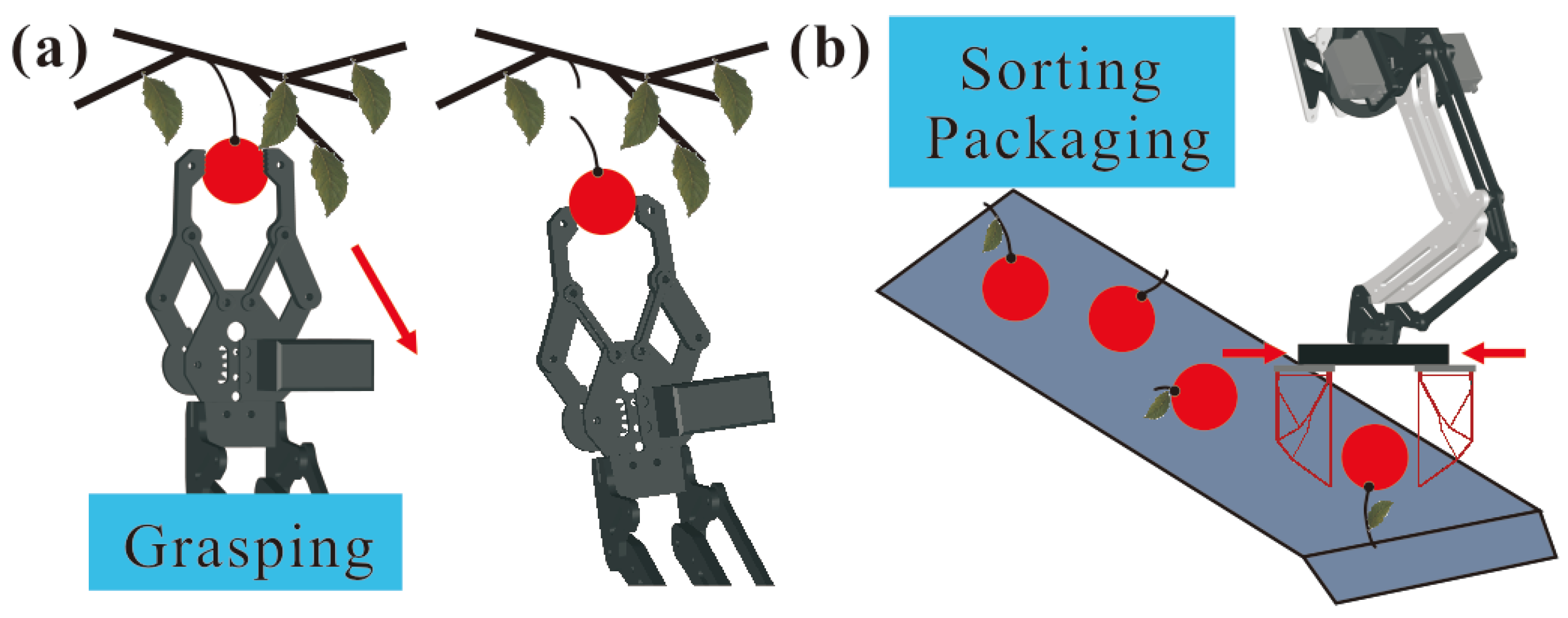
- An adaptive finger structure with low contact stress is presented. This structure has superior performance (adaptability and contact performance) and versatility in applications. Based on the above-mentioned fingers, flexible grippers with different driving methods were designed. This gripper can be used in fruit grasping tasks to avoid fruit damage, such as fruit picking, sorting and packaging, etc.
2. Flexible Finger Topology Optimization with Contact Constraints
2.1. Topology Optimization Formulations
2.2. Design Results of Flexible Fingers
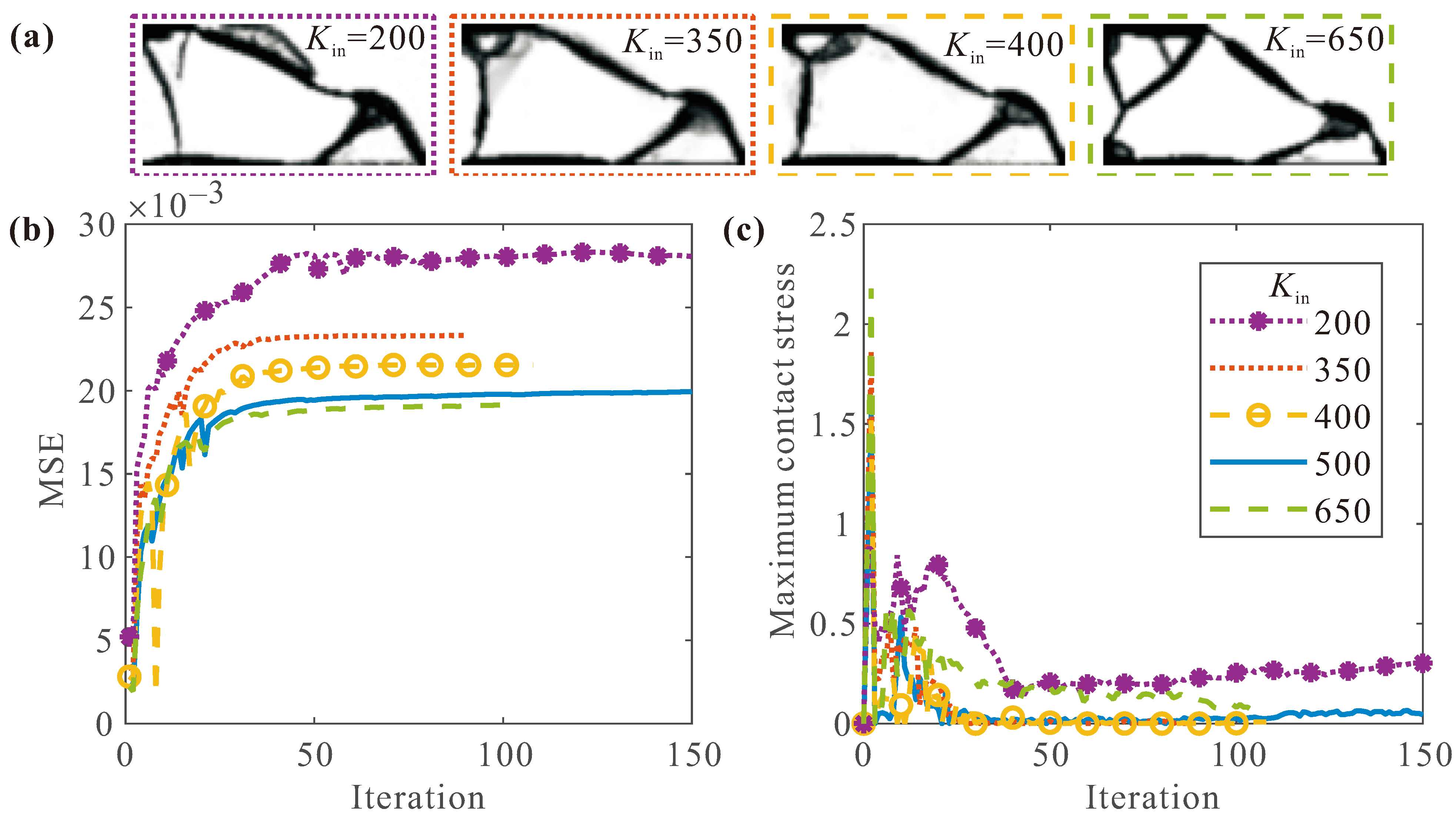
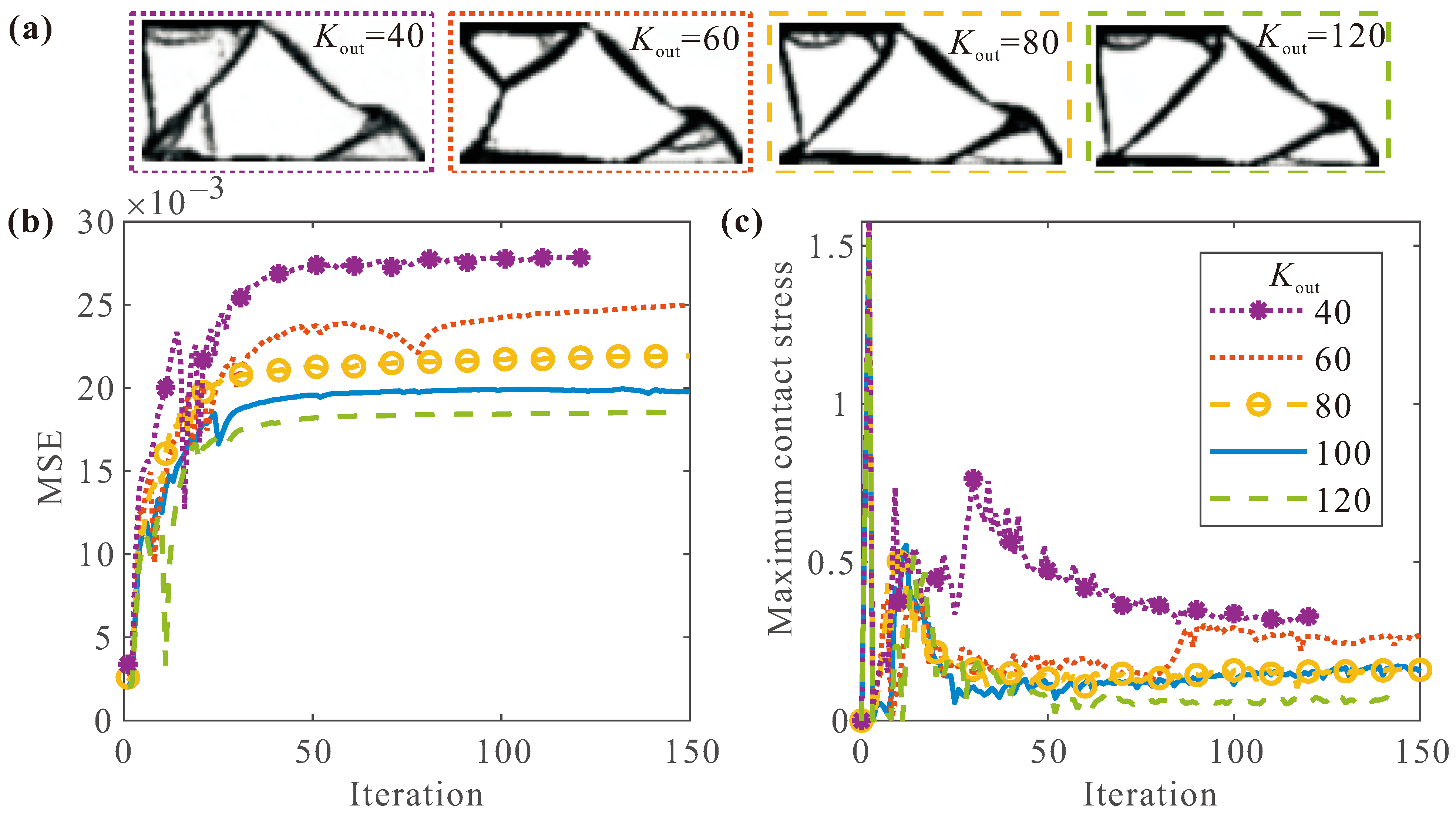
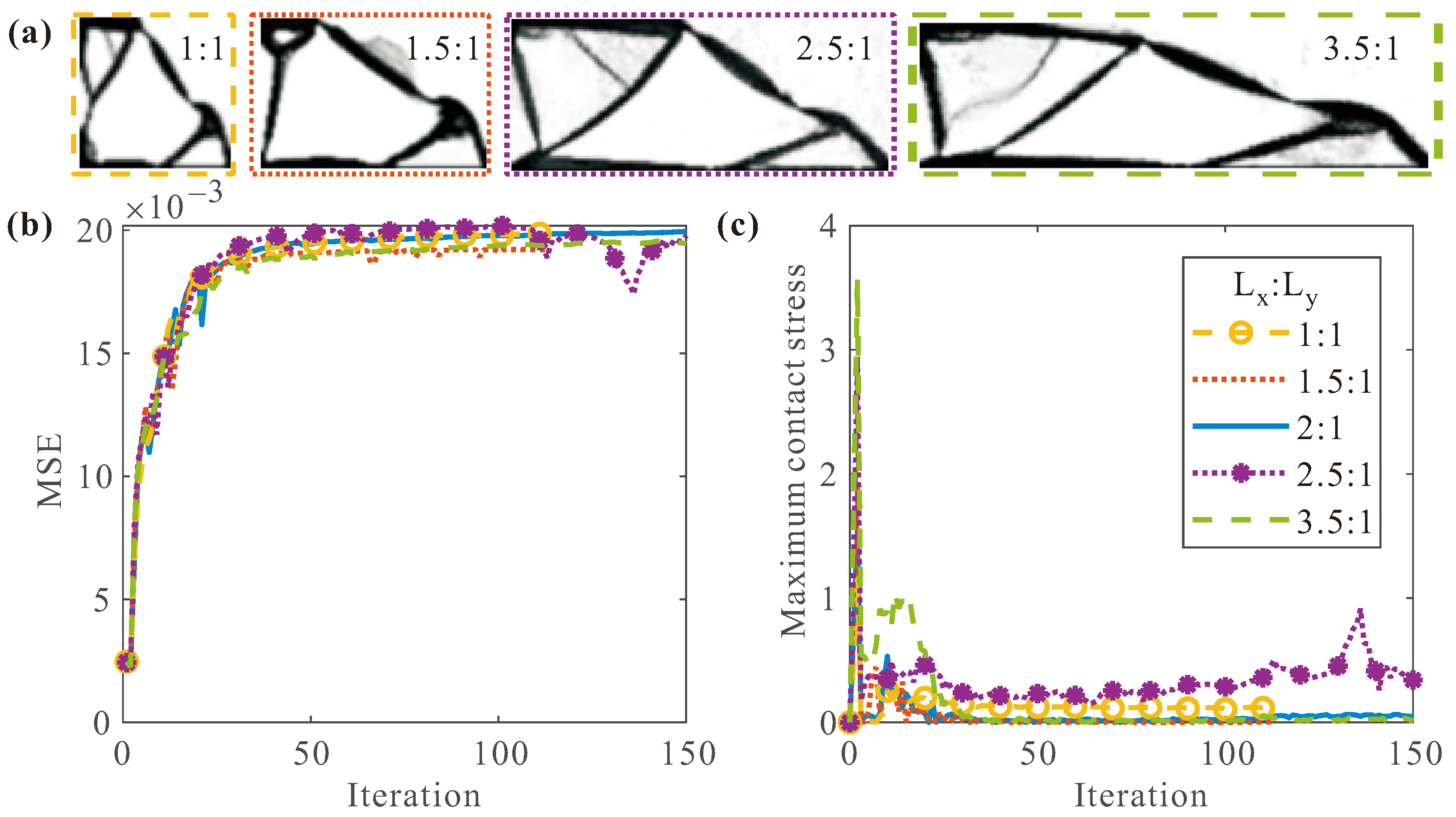
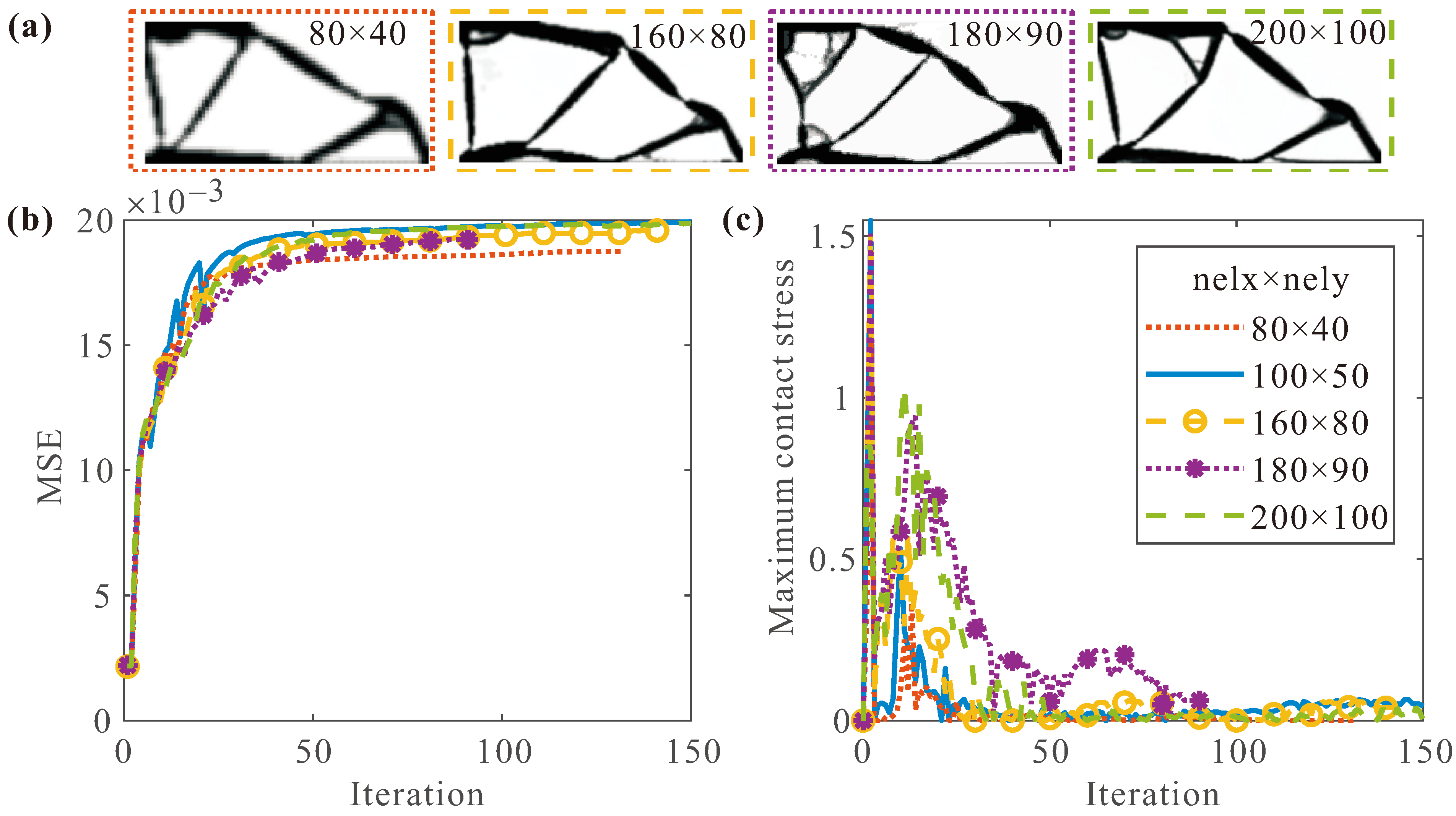
2.3. Design Parameters’ Influence on Topology
3. Numerical and Experimental Studies of the Flexible Grippers
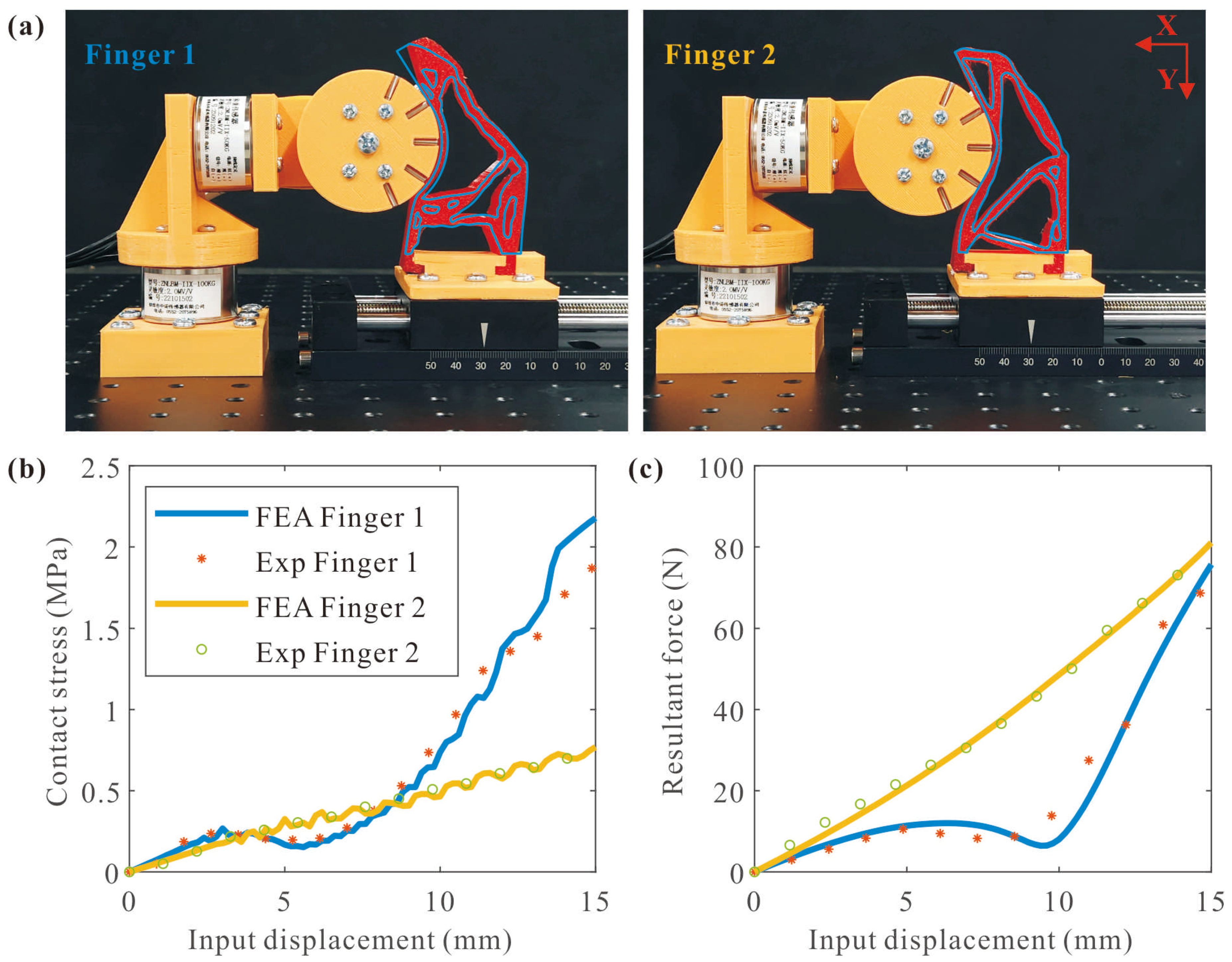
3.1. Verification of Contact-Constrained Flexible Fingers
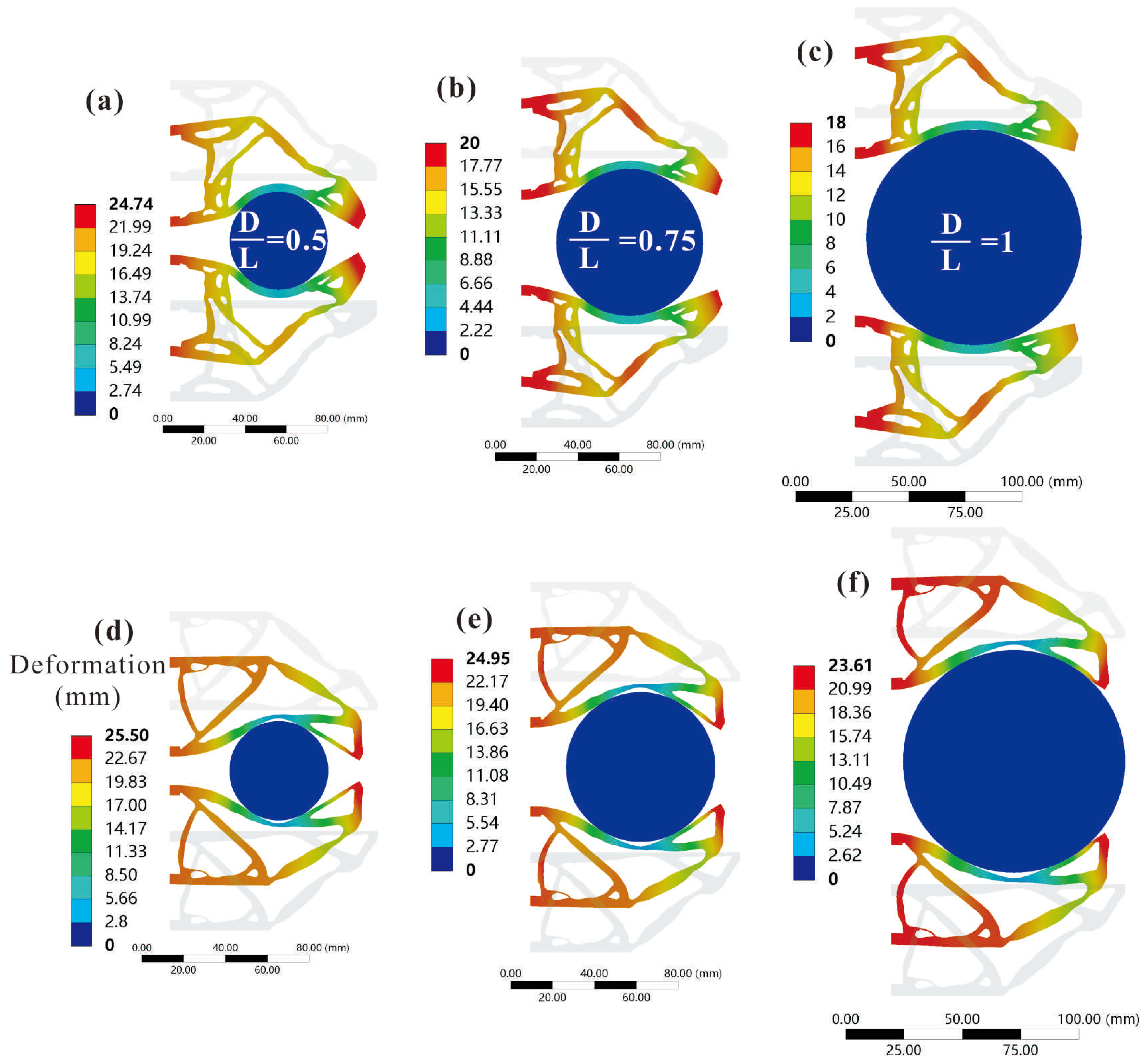
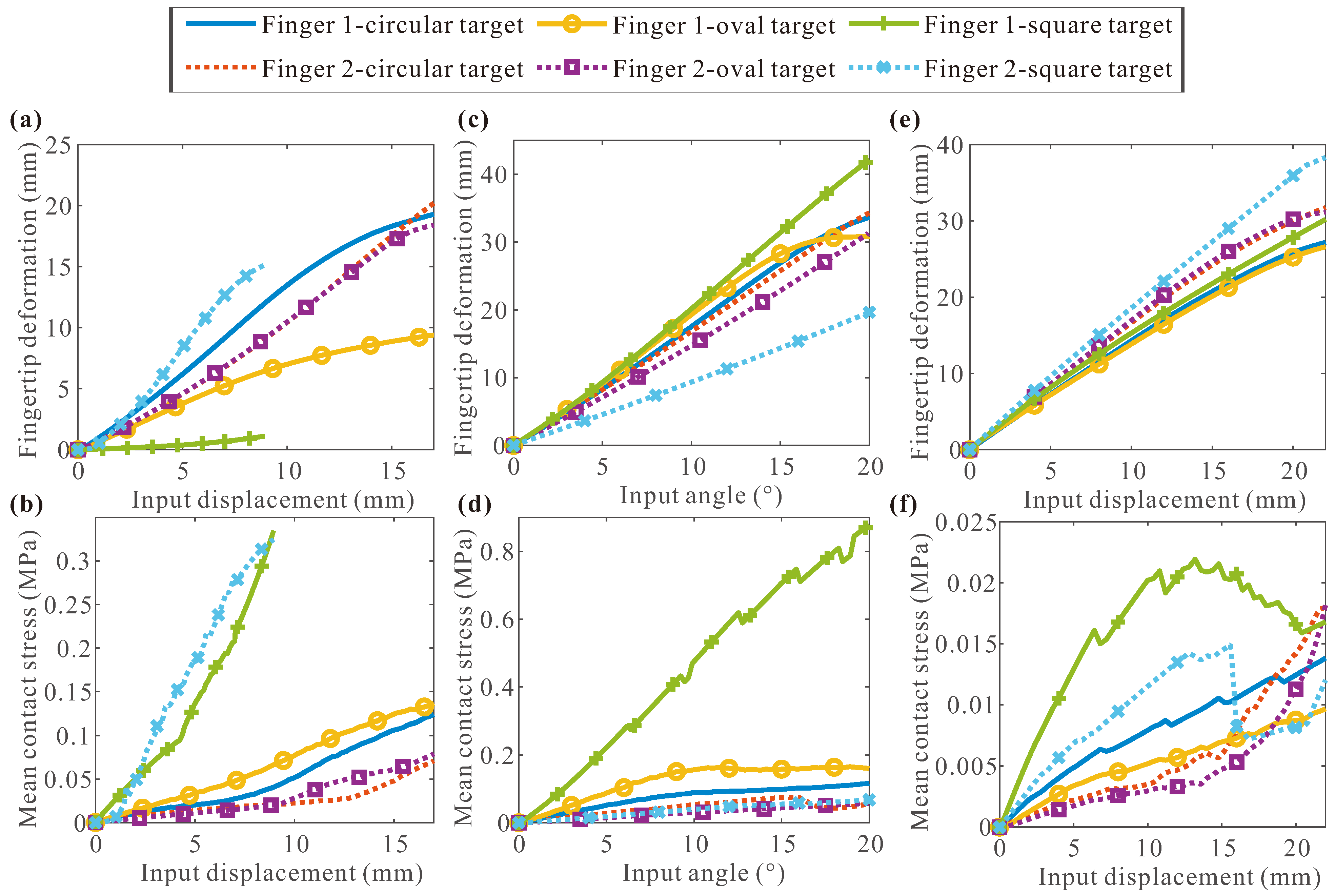
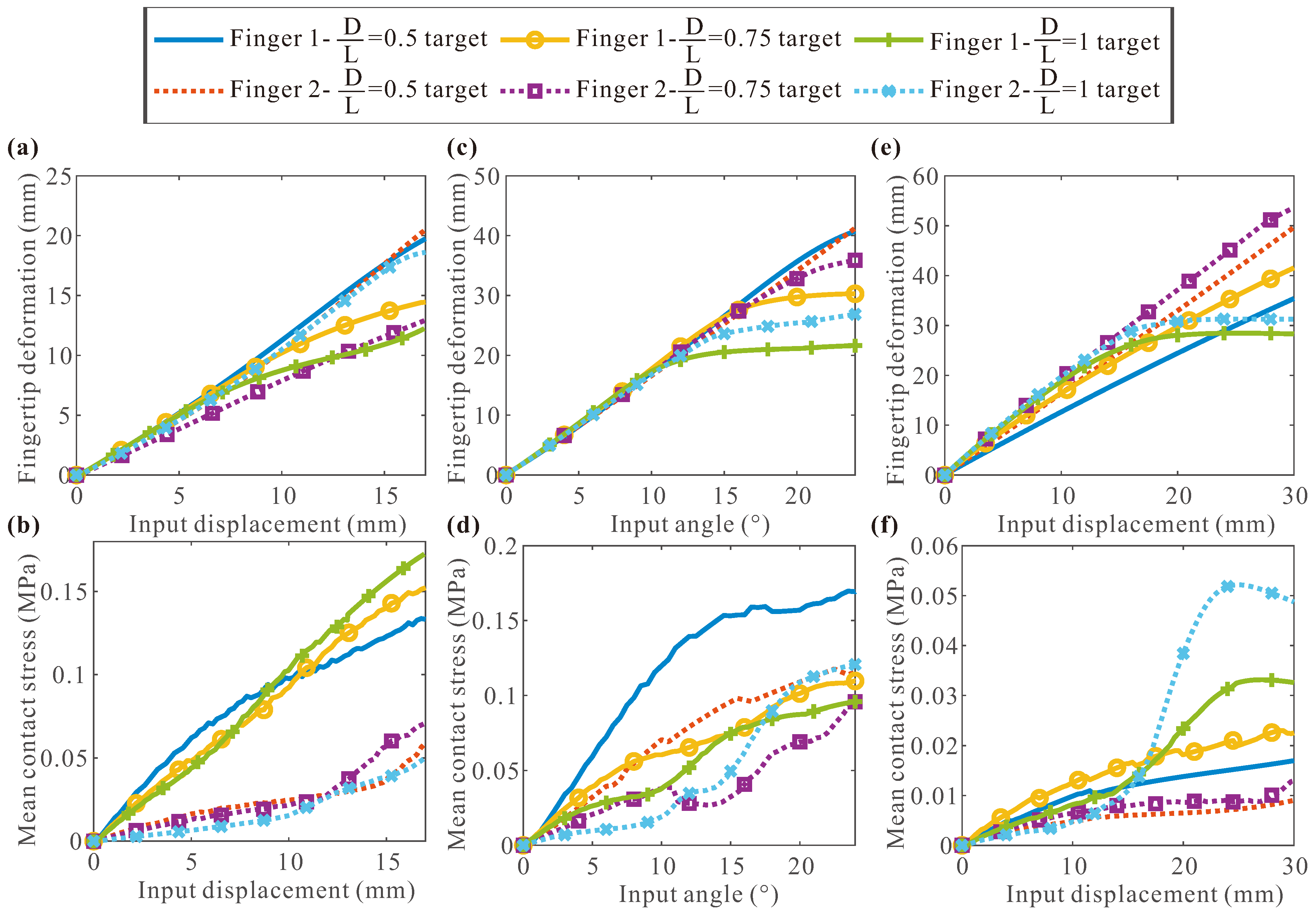
3.2. Shape and Size Adaptability
3.3. Performance Analysis of Flexible Grippers
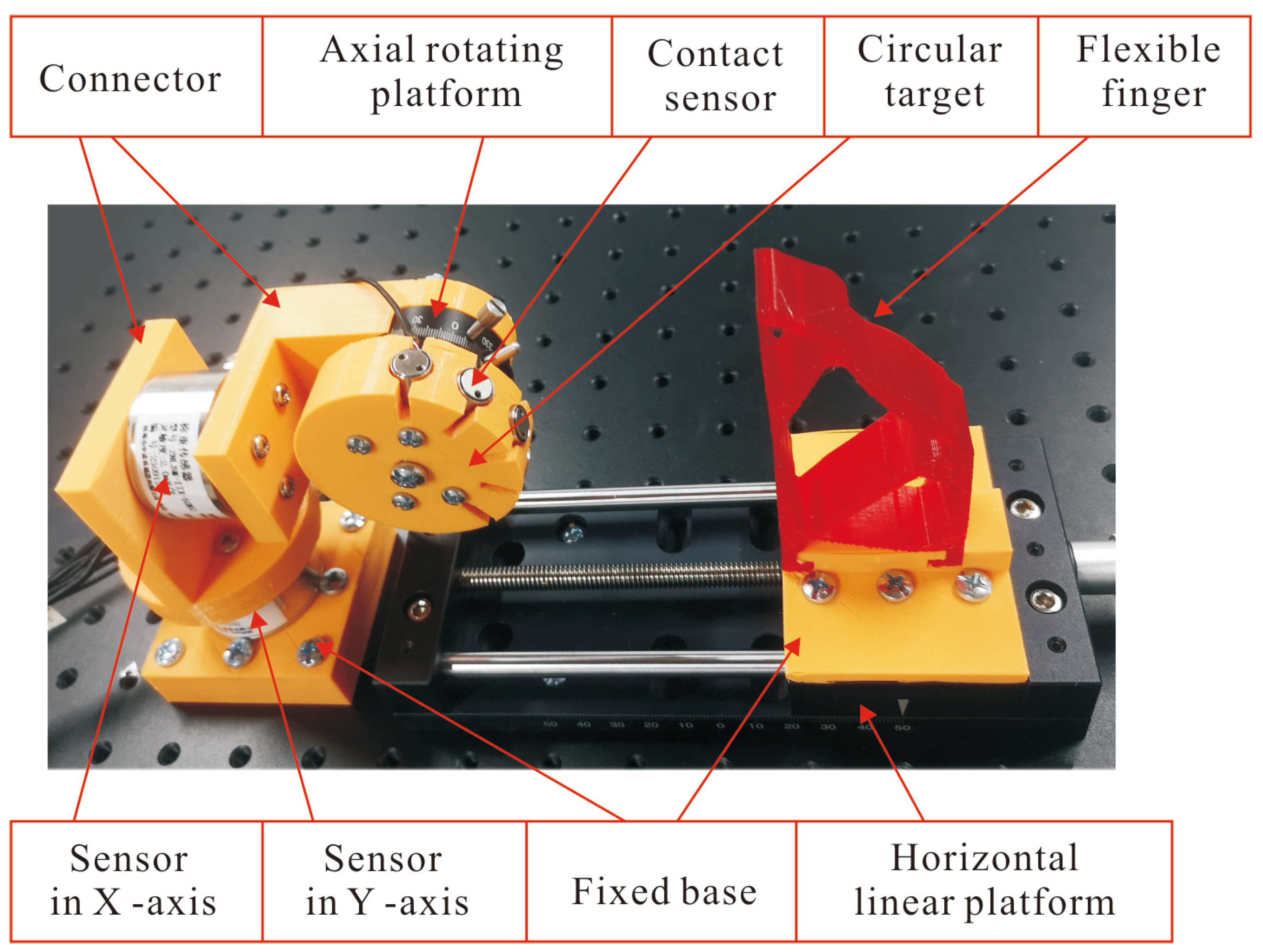
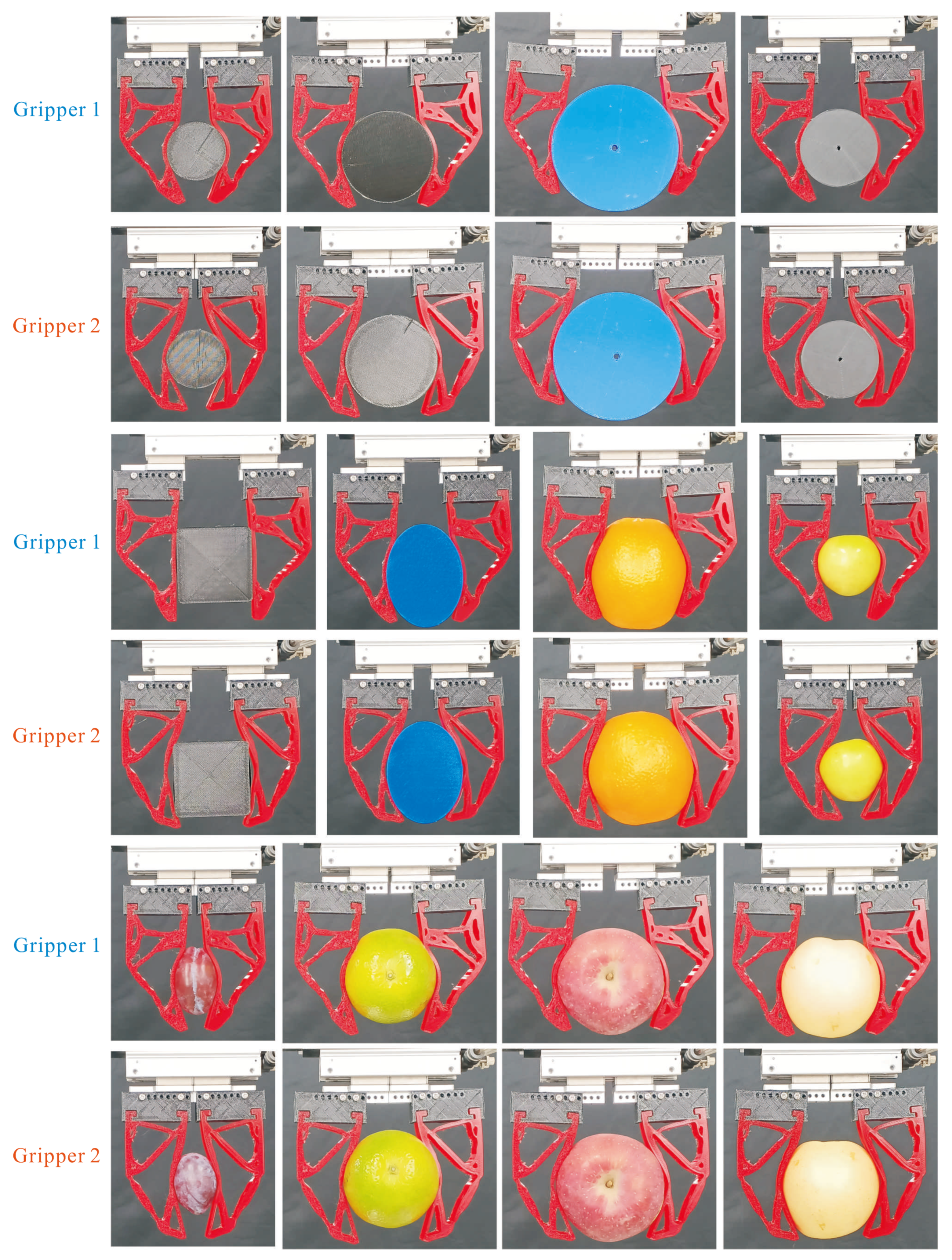
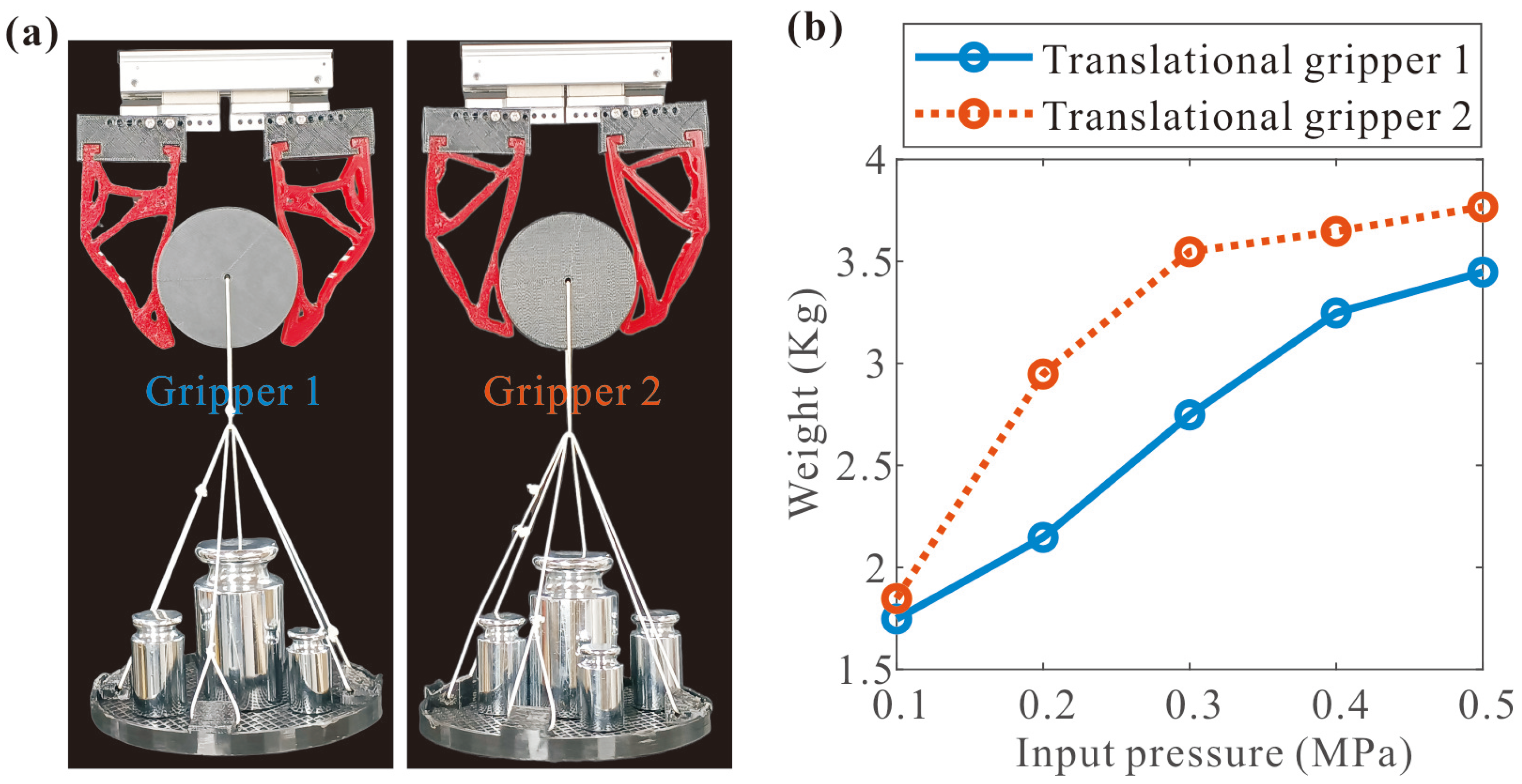
3.4. Experimental Results
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wakchaure, M.; Patle, B.; Mahindrakar, A. Application of AI techniques and robotics in agriculture: A review. Artif. Intell. Life Sci. 2023, 3, 100057. [Google Scholar] [CrossRef]
- Ji, W.; He, G.; Xu, B.; Zhang, H.; Yu, X. A new picking pattern of a flexible three-fingered end-effector for apple harvesting robot. Agriculture 2024, 14, 102. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Sugirbay, A.; Sun, H.; Chen, J. Design and evaluation of a robotic apple harvester using optimized picking patterns. Comput. Electron. Agric. 2022, 198, 107092. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, F.; Zhang, J.; Guo, H.; Gao, J. Picking patterns evaluation for cherry tomato robotic harvesting end-effector design. Biosyst. Eng. 2024, 239, 1–12. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, Z.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Tian, M.; Zhang, Y. Research on flexible end-effectors with humanoid grasp function for small spherical fruit picking. Agriculture 2023, 13, 123. [Google Scholar] [CrossRef]
- Xie, B.; Jin, M.; Duan, J.; Yang, Z.; Xu, S.; Luo, Y.; Wang, H. Design and analysis of a flexible adaptive supporting device for banana harvest. Agronomy 2022, 12, 593. [Google Scholar] [CrossRef]
- Jo, Y.; Park, Y.; Son, H.I. A suction cup-based soft robotic gripper for cucumber harvesting: Design and validation. Biosyst. Eng. 2024, 238, 143–156. [Google Scholar] [CrossRef]
- Park, Y.; Seol, J.; Pak, J.; Jo, Y.; Jun, J.; Son, H.I. A novel end-effector for a fruit and vegetable harvesting robot: Mechanism and field experiment. Precis. Agric. 2023, 24, 948–970. [Google Scholar] [CrossRef]
- van Herck, L.; Kurtser, P.; Wittemans, L.; Edan, Y. Crop design for improved robotic harvesting: A case study of sweet pepper harvesting. Biosyst. Eng. 2020, 192, 294–308. [Google Scholar] [CrossRef]
- Vrochidou, E.; Tsakalidou, V.N.; Kalathas, I.; Gkrimpizis, T.; Pachidis, T.; Kaburlasos, V.G. An overview of end effectors in agricultural robotic harvesting systems. Agriculture 2022, 12, 1240. [Google Scholar] [CrossRef]
- Crooks, W.; Vukasin, G.; O’Sullivan, M.; Messner, W.; Rogers, C. Fin ray® effect inspired soft robotic gripper: From the robosoft grand challenge toward optimization. Front. Robot. AI 2016, 3, 70. [Google Scholar] [CrossRef]
- Au, W.; Zhou, H.; Liu, T.; Kok, E.; Wang, X.; Wang, M.; Chen, C. The Monash Apple Retrieving System: A review on system intelligence and apple harvesting performance. Comput. Electron. Agric. 2023, 213, 108164. [Google Scholar] [CrossRef]
- Wang, X.; Kang, H.; Zhou, H.; Au, W.; Wang, M.Y.; Chen, C. Development and evaluation of a robust soft robotic gripper for apple harvesting. Comput. Electron. Agric. 2023, 204, 107552. [Google Scholar] [CrossRef]
- Cai, S.; Tang, C.; Pan, L.; Bao, G.; Bai, W.; Yang, Q. Pneumatic webbed soft gripper for unstructured grasping. Int. J. Agric. Biol. Eng. 2021, 14, 145–151. [Google Scholar] [CrossRef]
- Cao, M.; Sun, Y.; Zhang, J.; Ying, Z. A novel pneumatic gripper driven by combination of soft fingers and bellows actuator for flexible grasping. Sens. Actuators A Phys. 2023, 355, 114335. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; Au, W.; Kang, H.; Chen, C. Intelligent robots for fruit harvesting: Recent developments and future challenges. Precis. Agric. 2022, 23, 1856–1907. [Google Scholar] [CrossRef]
- Elfferich, J.F.; Dodou, D.; Della Santina, C. Soft robotic grippers for crop handling or harvesting: A review. IEEE Access 2022, 10, 75428–75443. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Saudabayev, A.; Varol, H.A. Sensors for robotic hands: A survey of state of the art. IEEE Access 2015, 3, 1765–1782. [Google Scholar] [CrossRef]
- Aoyagi, S.; Suzuki, M.; Morita, T.; Takahashi, T.; Takise, H. Bellows suction cup equipped with force sensing ability by direct coating thin-film resistor for vacuum type robotic hand. IEEE/ASME Trans. Mechatron. 2020, 25, 2501–2512. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, H.; Yuan, H.; Liang, B. A compliant adaptive gripper and its intrinsic force sensing method. IEEE Trans. Robot. 2021, 37, 1584–1603. [Google Scholar] [CrossRef]
- Xu, K.; Simaan, N. An investigation of the intrinsic force sensing capabilities of continuum robots. IEEE Trans. Robot. 2008, 24, 576–587. [Google Scholar] [CrossRef]
- Aloi, V.A.; Rucker, D.C. Estimating loads along elastic rods. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2867–2873. [Google Scholar]
- Zhang, Z.; Zhou, J.; Yi, B.; Zhang, B.; Wang, K. A flexible swallowing gripper for harvesting apples and its grasping force sensing model. Comput. Electron. Agric. 2023, 204, 107489. [Google Scholar] [CrossRef]
- Ji, W.; Tang, C.; Xu, B.; He, G. Contact force modeling and variable damping impedance control of apple harvesting robot. Comput. Electron. Agric. 2022, 198, 107026. [Google Scholar] [CrossRef]
- Lin, J.; Hu, Q.; Xia, J.; Zhao, L.; Du, X.; Li, S.; Chen, Y.; Wang, X. Non-destructive fruit firmness evaluation using a soft gripper and vision-based tactile sensing. Comput. Electron. Agric. 2023, 214, 108256. [Google Scholar] [CrossRef]
- Visentin, F.; Castellini, F.; Muradore, R. A soft, sensorized gripper for delicate harvesting of small fruits. Comput. Electron. Agric. 2023, 213, 108202. [Google Scholar] [CrossRef]
- Wang, D.; Jiang, C.; Gu, G. Modeling and Design of Lattice-Reinforced Pneumatic Soft Robots. IEEE Trans. Robot. 2023, 40, 606–623. [Google Scholar] [CrossRef]
- Kako, T.; Wang, Z.; Mori, Y.; Zhang, H.; Wang, Z. 3D Printable Origami-Inspired Pneumatic Soft Actuator with Modularized Design. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar]
- Washio, S.; Gilday, K.; Iida, F. Design and control of a multi-modal soft gripper inspired by elephant fingers. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 4228–4235. [Google Scholar]
- Sui, D.; Zhu, Y.; Zhao, S.; Wang, T.; Agrawal, S.K.; Zhang, H.; Zhao, J. A bioinspired soft swallowing gripper for universal adaptable grasping. Soft Robot. 2022, 9, 36–56. [Google Scholar] [CrossRef]
- Wooten, M.; Frazelle, C.; Walker, I.D.; Kapadia, A.; Lee, J.H. Exploration and inspection with vine-inspired continuum robots. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5526–5533. [Google Scholar]
- Shan, Y.; Zhao, Y.; Yu, H.; Pei, C.; Jin, Z.; Sun, Y. Design and Grasping Force Modeling for a Soft Robotic Gripper with Multi-stem Twining. J. Bionic Eng. 2023, 20, 2123–2134. [Google Scholar] [CrossRef]
- Wu, J.; Sigmund, O.; Groen, J.P. Topology optimization of multi-scale structures: A review. Struct. Multidiscip. Optim. 2021, 63, 1455–1480. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, X.; Zhang, H.; Liang, J.; Zang, H.; Li, H.; Wang, R. Design of compliant mechanisms using continuum topology optimization: A review. Mech. Mach. Theory 2020, 143, 103622. [Google Scholar] [CrossRef]
- Sigmund, O. On the design of compliant mechanisms using topology optimization. J. Struct. Mech. 1997, 25, 493–524. [Google Scholar] [CrossRef]
- Liu, C.H.; Chen, Y.; Yang, S.Y. Topology optimization and prototype of a multimaterial-like compliant finger by varying the infill density in 3D printing. Soft Robot. 2022, 9, 837–849. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Chen, F.; Fuh, J.Y.; Wang, M.Y. Topology optimized multimaterial soft fingers for applications on grippers, rehabilitation, and artificial hands. IEEE/ASME Trans. Mechatron. 2018, 24, 120–131. [Google Scholar] [CrossRef]
- Wang, N.; Guo, H.; Chen, B.; Cui, C.; Zhang, X. Integrated design of actuation and mechanism of dielectric elastomers using topology optimization based on fat Bezier curves. Soft Robot. 2019, 6, 644–656. [Google Scholar] [CrossRef]
- Chen, F.; Wang, M.Y. Design optimization of soft robots: A review of the state of the art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Li, D.; Chen, S.; Song, Z.; Liang, J.; Zhu, X.; Chen, F. Tailoring the in-plane and out-of-plane stiffness of soft fingers by endoskeleton topology optimization for stable grasping. Sci. China Technol. Sci. 2023, 66, 3080–3089. [Google Scholar] [CrossRef]
- Zhang, H.; Kumar, A.S.; Fuh, J.Y.H.; Wang, M.Y. Design and development of a topology-optimized three-dimensional printed soft gripper. Soft Robot. 2018, 5, 650–661. [Google Scholar] [CrossRef]
- Pinskier, J.; Howard, D. From bioinspiration to computer generation: Developments in autonomous soft robot design. Adv. Intell. Syst. 2022, 4, 2100086. [Google Scholar] [CrossRef]
- Liu, C.H.; Chiu, C.H.; Hsu, M.C.; Chen, Y.; Chiang, Y.P. Topology and size–Shape optimization of an adaptive compliant gripper with high mechanical advantage for grasping irregular objects. Robotica 2019, 37, 1383–1400. [Google Scholar] [CrossRef]
- Liu, C.H.; Hsu, M.C.; Chen, Y.; Chen, W.T.; Chen, T.L. A topology-optimized 3D printed compliant finger with flex sensor for adaptive grasping of unknown objects. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 92–97. [Google Scholar]
- Liu, C.H.; Hsu, M.C.; Chen, T.L.; Chen, Y. Optimal design of a compliant constant-force mechanism to deliver a nearly constant output force over a range of input displacements. Soft Robot. 2020, 7, 758–769. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.H.; Chung, F.M.; Chen, Y.; Chiu, C.H.; Chen, T.L. Optimal design of a motor-driven three-finger soft robotic gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Huang, J.; Wei, Z.; Cui, Y.; Liu, J. Clamping force manipulation in 2D compliant gripper topology optimization under frictionless contact. Struct. Multidiscip. Optim. 2023, 66, 164. [Google Scholar] [CrossRef]
- Bourdin, B. Filters in topology optimization. Int. J. Numer. Methods Eng. 2001, 50, 2143–2158. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, X.; Zhu, B. A 213-line topology optimization code for geometrically nonlinear structures. Struct. Multidiscip. Optim. 2019, 59, 1863–1879. [Google Scholar] [CrossRef]
- Svanberg, K. The method of moving asymptotes—A new method for structural optimization. Int. J. Numer. Methods Eng. 1987, 24, 359–373. [Google Scholar] [CrossRef]
- Li, Y.; Du, X.; Wang, J.; Lei, C. Study on mechanical properties of apple picking damage. In Proceedings of the 2017 3rd International Forum on Energy, Environment Science and Materials (IFEESM 2017), Shenzhen, China, 25–26 November 2017; Atlantis Press: Amsterdam, The Netherlands, 2018; pp. 1666–1670. [Google Scholar]
- An, X.; Li, Z.; Zude-Sasse, M.; Tchuenbou-Magaia, F.; Yang, Y. Characterization of textural failure mechanics of strawberry fruit. J. Food Eng. 2020, 282, 110016. [Google Scholar] [CrossRef]
- Jentzsch, M.; Badstöber, M.C.; Umlas, F.; Speck, T. Damage protection in fruits: Comparative analysis of the functional morphology of the fruit peels of five Citrus species via quasi-static compression tests. Front. Mater. 2022, 9, 979151. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, B.; Jin, M.; Duan, J.; Li, Z.; Wang, W.; Qu, M.; Yang, Z. Design of Adaptive Grippers for Fruit-Picking Robots Considering Contact Behavior. Agriculture 2024, 14, 1082. https://doi.org/10.3390/agriculture14071082
Xie B, Jin M, Duan J, Li Z, Wang W, Qu M, Yang Z. Design of Adaptive Grippers for Fruit-Picking Robots Considering Contact Behavior. Agriculture. 2024; 14(7):1082. https://doi.org/10.3390/agriculture14071082
Chicago/Turabian StyleXie, Bowei, Mohui Jin, Jieli Duan, Zewei Li, Weisheng Wang, Mingyu Qu, and Zhou Yang. 2024. "Design of Adaptive Grippers for Fruit-Picking Robots Considering Contact Behavior" Agriculture 14, no. 7: 1082. https://doi.org/10.3390/agriculture14071082