
Design and Simulation of Intra-Row Obstacle Avoidance Shovel-Type Weeding Machine in Orchard


Abstract
1. Introduction
2. Materials and Methods
2.1. Structure and Working Principle of Intra-Row Weeding Machine
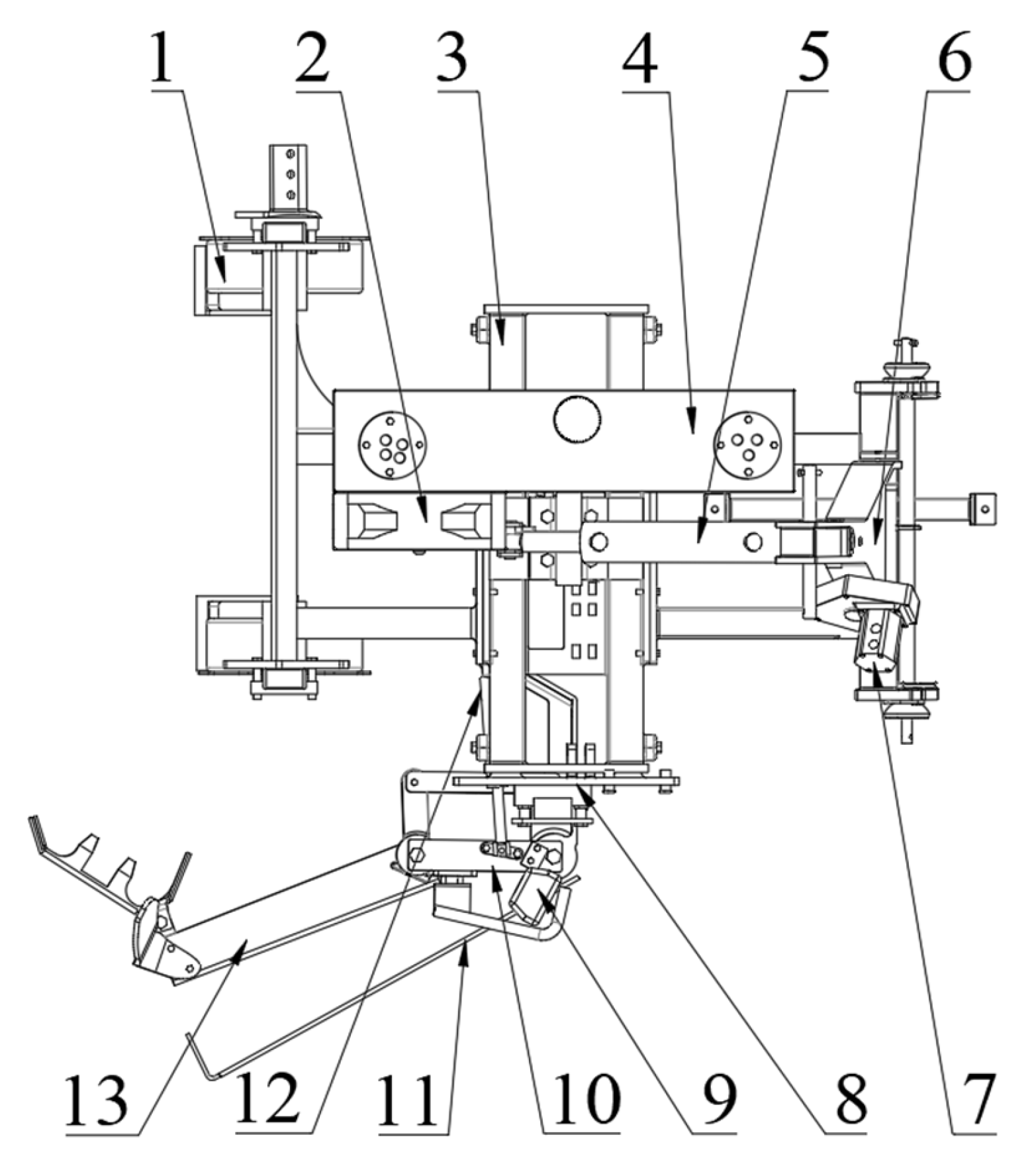
2.1.1. Structure of Weeding Machine
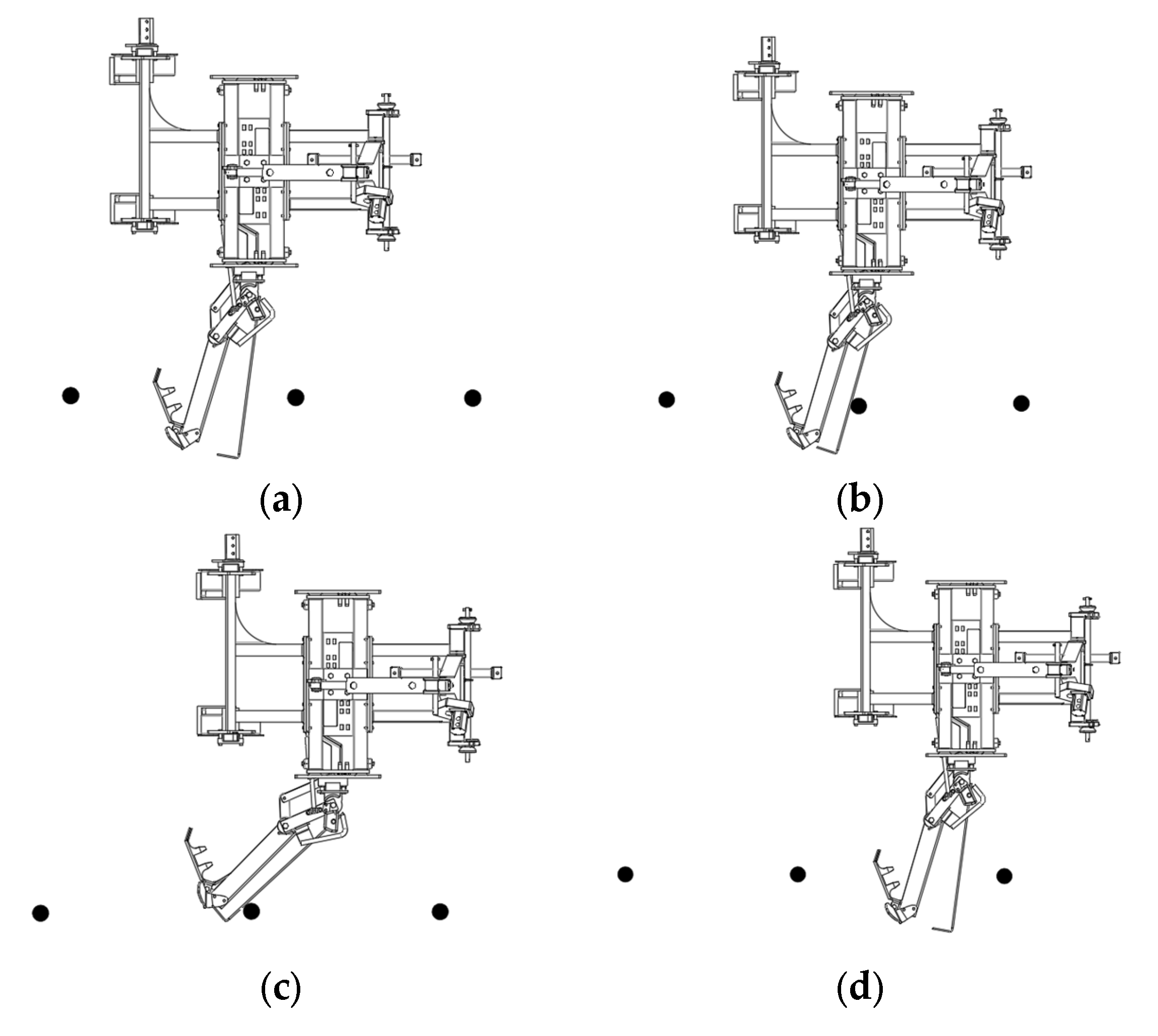
2.1.2. Working Principle of Weeding Machine
2.2. Key Component Design and Parameter Determination
2.2.1. Automatic Obstacle Avoidance Mechanism
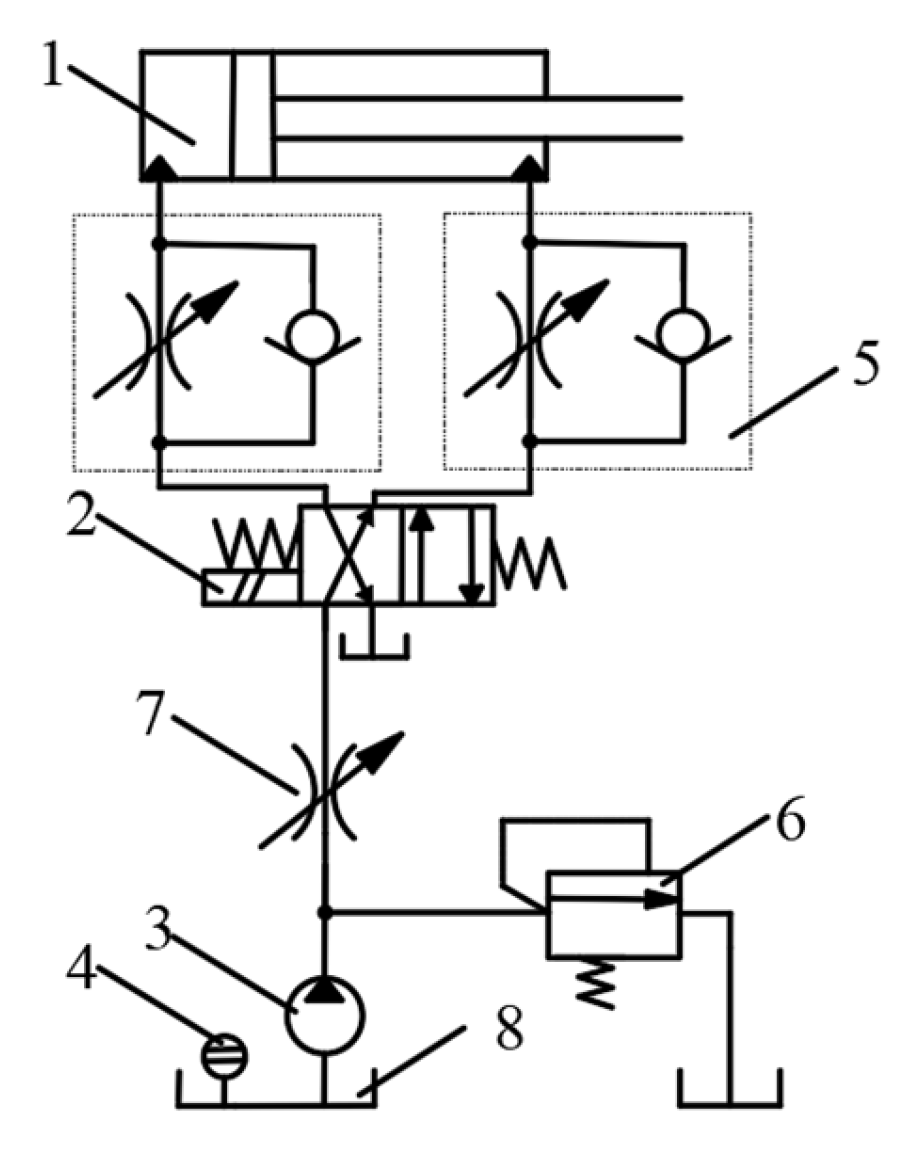
2.2.2. Obstacle Avoidance Hydraulic System
2.2.3. Signal Acquisition Device
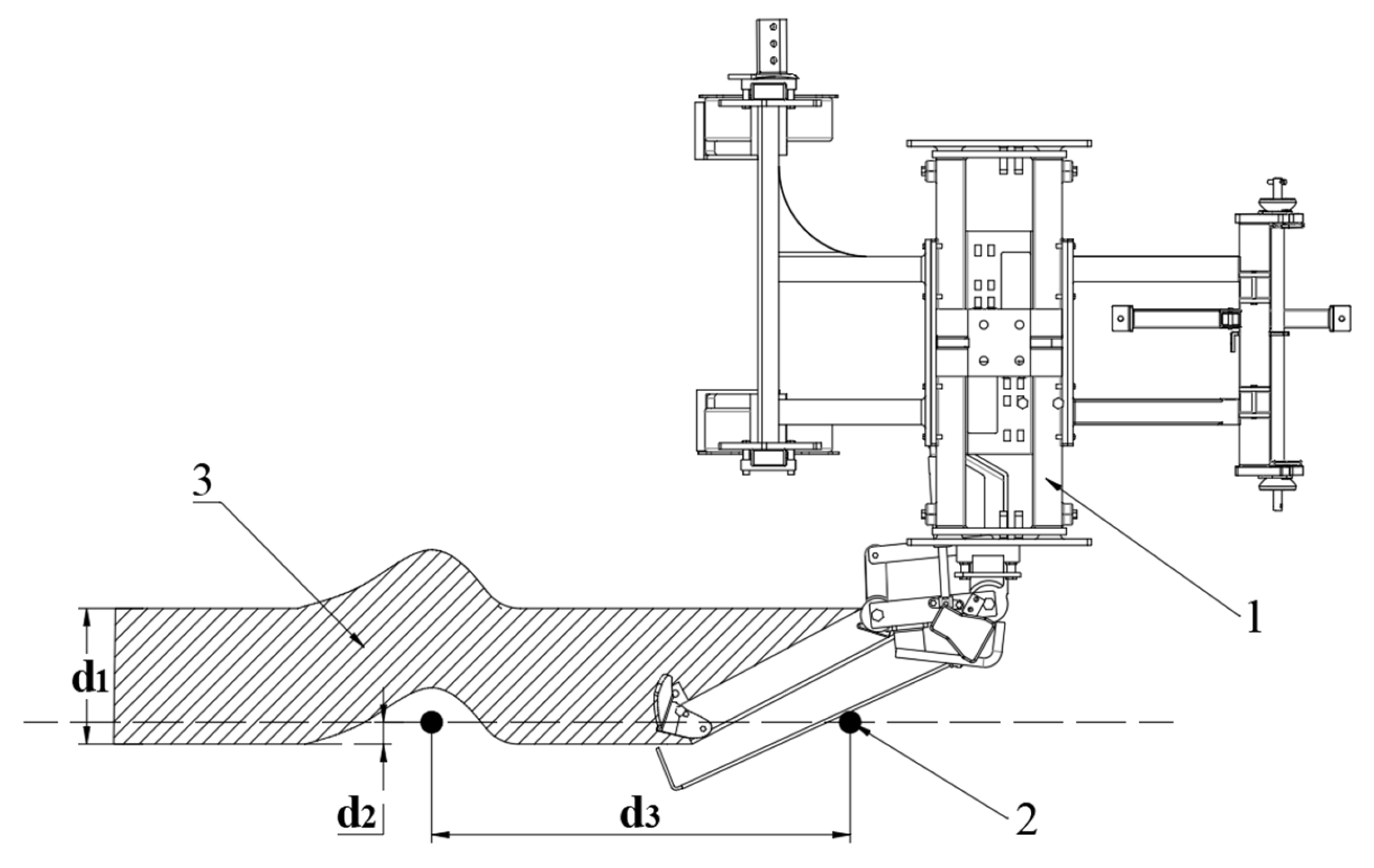
2.2.4. Determination of the Structural Parameters of the Weeding Shovel
2.3. Analysis of the Extension and Retraction Speed of the Piston Rod of the Obstacle Avoidance Hydraulic Cylinder
2.3.1. Analysis of the Retraction Speed of the Piston Rod of the Obstacle Avoidance Hydraulic Cylinder
2.3.2. Analysis of the Extension Speed of the Piston Rod of the Obstacle Avoidance Hydraulic Cylinder
2.4. Simulation Analysis of Weeding Shovel Motion Trajectory
Establishment of Simulation Model
3. Results
3.1. Single Factor Simulation Experiment
3.2. Quadratic Regression Combination Experiment
3.2.1. Test Results and Analysis
3.2.2. Response Surface Analysis
3.3. Simulation Analysis at Different Plant Spacings
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Souza, E.; Leal, I.; Umsza-Guez, M.; Machado, B. Evaluation of the Technological Potential of Grape Peels through Patent Document Analysis: Agro-industrial Waste with Biotechnological Potential. Recent. Pat. Nanotechnol. 2021, 15, 35–346. [Google Scholar] [CrossRef] [PubMed]
- Cabrera-Pérez, C.; Valencia-Gredilla, F.; Royo-Esnal, A.; Recasens, J. Organic Mulches as an Alternative to Conventional Under-Vine Weed Management in Mediterranean Irrigated Vineyards. Plants 2022, 11, 2785. [Google Scholar] [CrossRef] [PubMed]
- Andert, S. The Method and Timing of Weed Control Affect the Productivity of Intercropped Maize (Zea mays L.) and Bean (Phaseolus vulgaris L.). Agriculture 2021, 11, 380. [Google Scholar] [CrossRef]
- Morin, L. Progress in Biological Control of Weeds with Plant Pathogens. Annu. Rev. Phytopathol. 2020, 58, 201–213. [Google Scholar] [CrossRef]
- Monteiro, A.; Santos, S. Sustainable Approach to Weed Management: The Role of Precision Weed Management. Agronomy 2022, 12, 118. [Google Scholar] [CrossRef]
- Guo, Y.; Cheng, L.; Long, W.; Gao, J.; Zhang, J.F.; Chen, S.; Pu, H.M.; Hu, M.L. Synergistic mutations of two rapeseed AHAS genes confer high resistance to sulfonylurea herbicides for weed control. Theor. Appl. Genet. 2020, 133, 2811–2824. [Google Scholar] [CrossRef]
- Li, H.; Travlos, I.; Qi, L.; Kanatas, P.; Wang, P. Optimization of Herbicide Use: Study on Spreading and Evaporation Characteristics of Glyphosate-Organic Silicone Mixture Droplets on Weed Leaves. Agronomy 2019, 9, 547. [Google Scholar] [CrossRef]
- Winston, R.; Schwarzländer, M.; Hinz, H.; Pratt, P. Prioritizing Weeds for Biological Control Development in the Western USA: Adaptation of the Biological Control Target Selection System. Biocontrol 2024, 69, 335–351. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, Y.; Mu, D.; Bai, L.; Zhuang, H.; Li, H. YOLOX-based Blue Laser Weeding Robot in Corn Field. Front. Plant. Sci. 2022, 13, 1017803. [Google Scholar] [CrossRef]
- Michaliszyn-Gabrys, B.; Bronder, J.; Jarosz, W.; Krupanek, J. Potential of Eco-Weeding with High-Power Laser Adoption from the Farmers’ Perspective. Sustainability 2024, 16, 2353. [Google Scholar] [CrossRef]
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M.; Magni, S.; Caturegli, L.; Volterrani, M.; Mainardi, M.; Peruzzi, A. Autonomous Mowing and Complete Floor Cover for Weed Control in Vineyards. Agronomy 2021, 11, 538. [Google Scholar] [CrossRef]
- Gagliardi, L.; Fontanelli, M.; Luglio, S.; Frasconi, C.; Peruzzi, A.; Raffaelli, M. Evaluation of Sustainable Strategies for Mechanical Under-Row Weed Control in the Vineyard. Agronomy 2023, 13, 3005. [Google Scholar] [CrossRef]
- Gagliardi, L.; Luglio, S.; Peruzzi, A.; Fontanelli, M.; Frasconi, C.; Raffaelli, M. Comparative Analysis of the Performance of a Chain Mower and Tools That Perform Under-Row Weed Control with Tillage in the Vineyard. Agronomy 2024, 14, 206. [Google Scholar] [CrossRef]
- Pergher, G.; Gubiani, R.; Mainardis, M. Field Testing of a Biomass-Fueled Flamer for In-Row Weed Control in the Vineyard. Agriculture 2019, 9, 210. [Google Scholar] [CrossRef]
- Mwitta, C.; Rains, G.; Prostko, E. Evaluation of Diode Laser Treatments to Manage Weeds in Row Crops. Agronomy 2022, 12, 2681. [Google Scholar] [CrossRef]
- Zawada, M.; Legutko, S.; Goscianska-Lowinska, J.; Szymczyk, S.; Nijak, M.; Wojciechowski, J. Mechanical Weed Control Systems: Methods and Effectiveness. Sustainability 2023, 15, 15206. [Google Scholar] [CrossRef]
- Parasca, S.; Spaeth, M.; Rusu, T.; Bogdan, I. Mechanical Weed Control: Sensor-based Inter-row Hoeing in Sugar Beet (Beta vulgaris L.) in the Transylvanian Depression. Agronomy 2024, 14, 176. [Google Scholar] [CrossRef]
- Liu, C.; Yang, K.; Chen, Y.; Gong, H.; Feng, X.; Tang, Z. Benefits of Mechanical Weeding for Weed Control, Rice Growth Characteristics and Yield in Paddy Fields. Field Crops Res. 2023, 293, 108852. [Google Scholar] [CrossRef]
- Sampurno, R.; Liu, Z.; Abeyrathna, R.; Ahamed, T. Intrarow Uncut Weed Detection Using You-Only-Look-Once Instance Segmentation for Orchard Plantations. Sensors 2024, 24, 893. [Google Scholar] [CrossRef]
- Tillett, N.; Hague, T.; Grundy, A.; Dedousis, A. Mechanical within-row Weed Control for Transplanted Crops Using Computer Vision. Biosyst. Eng. 2008, 99, 171–178. [Google Scholar] [CrossRef]
- Gobor, Z.; Lammers, P.; Martinov, M. Development of a Mechatronic Intra-row Weeding System with Rotational Hoeing Tools: Theoretical Approach and Simulation. Comput. Electron. Agric. 2013, 98, 166–174. [Google Scholar] [CrossRef]
- Pérez-Ruiz, M.; Slaughter, D.; Gliever, C.; Upadhyaya, S.K. Automatic GPS-based Intra-row Weed Knife Control System for Transplanted Row Crops. Comput. Electron. Agric. 2012, 80, 41–49. [Google Scholar] [CrossRef]
- Xu, L.; Yu, C.; Liu, W.; Yuan, Q.; Ma, S.; Duan, Z.; Xing, J. Optimal Design on Auto Obstacle Avoidance Mechanism of Intra-row Weeder for Trellis Cultivated Grape. Trans. Chin. Soc. Agric. Eng. 2018, 34, 23–30. [Google Scholar] [CrossRef]
- Lin, J.; Wang, D.; Lv, Z.; Wang, X. Design and Experimental Study on Intelligent Obstacle Avoidance System for Orchard Rototiller. J. Shenyang. Agric. Univ. 2023, 54, 165–175. [Google Scholar] [CrossRef]
- Shen, Q.; Lei, X.; Ma, Z.; Li, J. Experimental Study on F.US UFO Mower for Avoiding Obstacles in Orchards. J. Chin. Agric. Mech. 2021, 42, 65–77. [Google Scholar] [CrossRef]
- Wang, Y.; Kang, J.; Peng, Q.; Chen, Y.; Fang, H.; Niu, M.; Wang, S. Design and Experiment of Obstacle Avoidance Weeding Machine for Fruit Trees. J. Jilin Univ. Eng. Technol. Ed. 2023, 53, 2410–2420. [Google Scholar] [CrossRef]
- Yu, C.; Xu, L.; Wang, Q.; Yuan, Q.; Ma, S.; Niu, C.; Yuan, X.; Zeng, J.; Wang, S.; Chen, C. Design and Experiment of Bilateral Operation Intra-row Auto Obstacle Avoidance Weeder for Trellis Cultivated Grape. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–9. [Google Scholar] [CrossRef]
- Jacquet, F.; Delame, N.; Vita, J.; Huyghe, C.; Reboud, X. The Micro-economic Impacts of a Ban on Glyphosate and Its Replacement with Mechanical Weeding in French Vineyards. Crop Prot. 2021, 150, 105778. [Google Scholar] [CrossRef]
- Xing, H.; Guo, S.; Shi, L.; Hou, X.; Liu, Y.; Liu, H. Design, Modeling and Experimental Evaluation of a Legged, Multi-vectored Water-jet Composite Driving Mechanism for an Amphibious Spherical Robot. Microsyst. Technol. 2020, 26, 475–487. [Google Scholar] [CrossRef]
- Geonea, I.; Dumitru, N.; Copilusi, C.; Margine, A.; Ciurezu, L. New Design and Motion Analysis of an Exoskeleton Robot for Assisting Human Locomotion. In Proceedings of the 22nd IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 21–23 May 2020. [Google Scholar] [CrossRef]
- Huang, J.C.; Tan, L.; Tian, K.P.; Zhang, B.; Ji, A.M.; Liu, H.L.; Cheng, S. Formation mechanism for the laying angle of hemp harvester based on ANSYS-ADAMS. Int. J. Agric. Biol. Eng. 2023, 16, 109–115. [Google Scholar] [CrossRef]
- Balas, P.; Makavana, J.; Mohnot, P.; Jhala, K.; Yadav, R. Inter and Intra Row Weeders: A Review. Curr. J. Appl. Sci. Technol. 2022, 41, 1–9. [Google Scholar] [CrossRef]
- Yang, T.; Jin, C.; Ni, Y.; Liu, Z.; Chen, M. Path Planning and Control System Design of an Unmanned Weeding Robot. Agriculture 2023, 13, 2001. [Google Scholar] [CrossRef]
- Xiang, M.; Qu, M.; Wang, G.; Ma, Z.; Chen, X.; Zhou, Z. Crop Detection Technologies, Mechanical Weeding Executive Parts and Working Performance of Intelligent Mechanical Weeding: A Review. Front. Plant Sci. 2024, 15, 1361002. [Google Scholar] [CrossRef]
- Ju, J.; Chen, G.; Lv, Z.; Zhao, M.; Sun, L.; Wang, Z.; Wang, J. Design and Experiment of an Adaptive Cruise Weeding Robot for Paddy Fields Based on Improved YOLOv5. Comput. Electron. Agric. 2024, 219, 108824. [Google Scholar] [CrossRef]
- Assirelli, A.; Liberati, P.; Santangelo, E.; Giudice, A.; Civitarese, V.; Pari, L. Evaluation of Sensors for Poplar Cutting Detection to be Used in Intra-row Weed Control Machine. Comput. Electron. Agric. 2015, 115, 161–170. [Google Scholar] [CrossRef]
- Pei, H.T.; Sun, Y.Q.; Huang, H.; Zhang, W.; Sheng, J.J.; Zhang, Z.Y. Weed Detection in Maize Fields by UAV Images Based on Crop Row Preprocessing and Improved YOLOv4. Agriculture 2022, 12, 975. [Google Scholar] [CrossRef]
- Wang, Y.F.; Zhang, X.D.; Ma, G.X.; Du, X.X.; Shaheen, N.; Mao, H.P. Recognition of weeds at asparagus fields using multi-feature fusion and backpropagation neural network. Int. J. Agr. Biol. Eng. 2021, 14, 190–198. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Factor | ||
|---|---|---|---|
| Piston Rod Extension Speed (mm/s) | Forward Speed of the Weeding Machine (mm/s) | Angle Threshold (°) | |
| −1 | 80 | 600 | 14 |
| 0 | 100 | 800 | 16 |
| 1 | 120 | 1000 | 18 |
| Experiment Number | Experimental Factor (Code) | Coverage Rate of Weeding Operation (M) | ||
|---|---|---|---|---|
| Piston Rod Extension Speed (Z1) | Forward Speed of the Weeding Machine (Z2) | Angle Threshold (Z3) | ||
| 1 | −1 | −1 | 0 | 83.6 |
| 2 | 1 | −1 | 0 | 86.1 |
| 3 | −1 | 1 | 0 | 78.3 |
| 4 | 1 | 1 | 0 | 82.5 |
| 5 | −1 | 0 | −1 | 80.5 |
| 6 | 1 | 0 | −1 | 83.8 |
| 7 | −1 | 0 | 1 | 81.9 |
| 8 | 1 | 0 | 1 | 85.0 |
| 9 | 0 | −1 | −1 | 83.7 |
| 10 | 0 | 1 | −1 | 80.1 |
| 11 | 0 | −1 | 1 | 85.7 |
| 12 | 0 | 1 | 1 | 81.8 |
| 13 | 0 | 0 | 0 | 82.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, W.; Tai, K.; Wang, X.; Dong, X.; Ou, M. Design and Simulation of Intra-Row Obstacle Avoidance Shovel-Type Weeding Machine in Orchard. Agriculture 2024, 14, 1124. https://doi.org/10.3390/agriculture14071124
Jia W, Tai K, Wang X, Dong X, Ou M. Design and Simulation of Intra-Row Obstacle Avoidance Shovel-Type Weeding Machine in Orchard. Agriculture. 2024; 14(7):1124. https://doi.org/10.3390/agriculture14071124
Chicago/Turabian StyleJia, Weidong, Kaile Tai, Xiaowen Wang, Xiang Dong, and Mingxiong Ou. 2024. "Design and Simulation of Intra-Row Obstacle Avoidance Shovel-Type Weeding Machine in Orchard" Agriculture 14, no. 7: 1124. https://doi.org/10.3390/agriculture14071124
APA StyleJia, W., Tai, K., Wang, X., Dong, X., & Ou, M. (2024). Design and Simulation of Intra-Row Obstacle Avoidance Shovel-Type Weeding Machine in Orchard. Agriculture, 14(7), 1124. https://doi.org/10.3390/agriculture14071124