
An Electric Gripper for Picking Brown Mushrooms with Flexible Force and In Situ Measurement


Abstract
1. Introduction
2. Materials and Methods
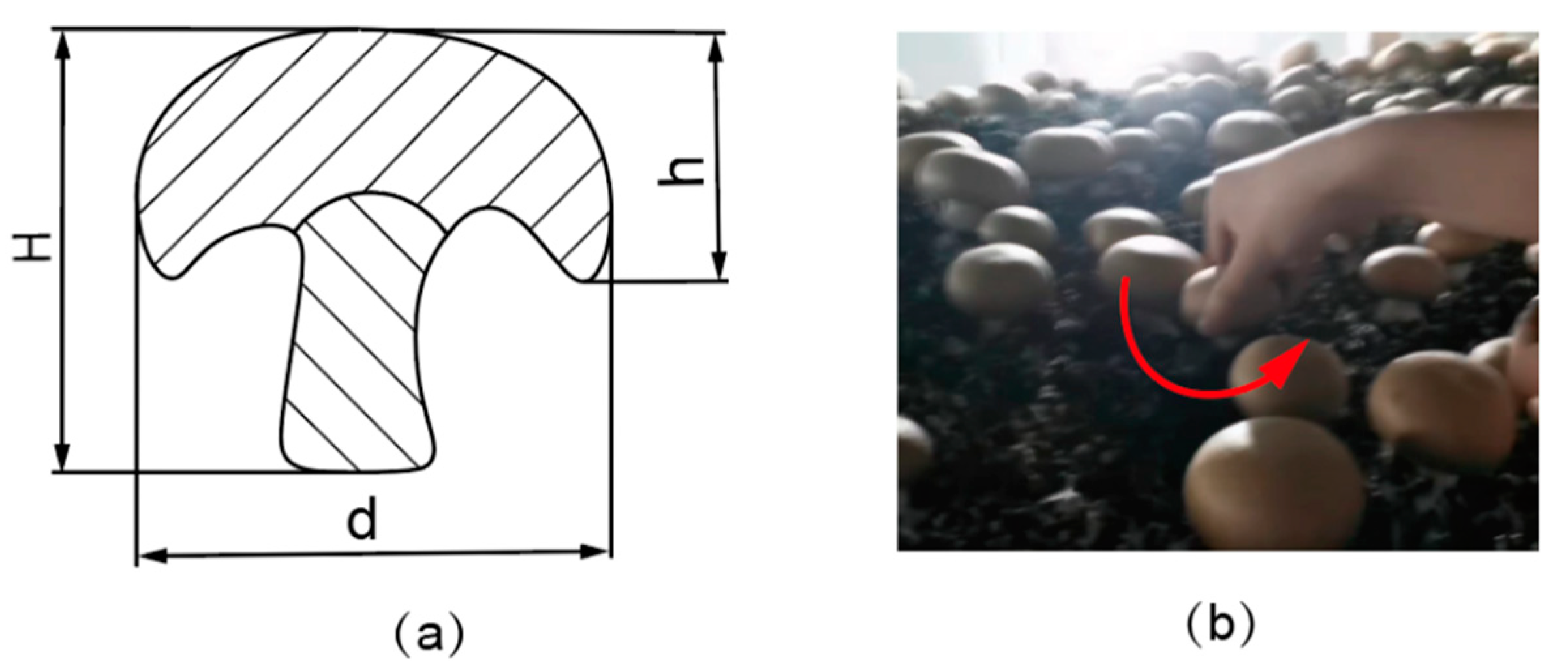
2.1. Design Basis
- Spread three or four fingers open to wrap the edge of the mushroom cap.
- Rotate the mushroom cap once to the left and once to the right.
- Quickly and non-destructively detach the stem from the substrate.
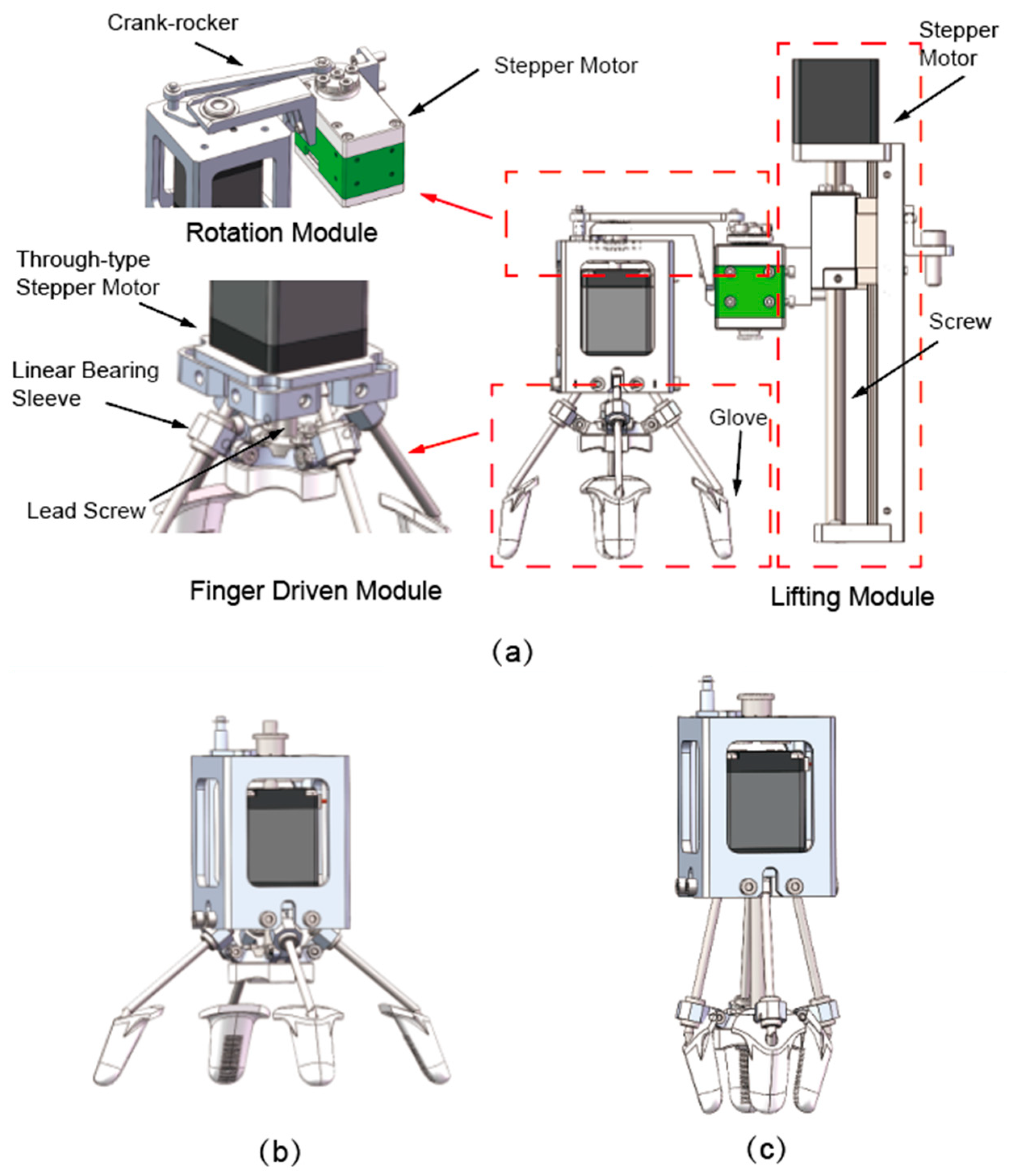
2.2. Design and Fabrication
- The lifting module fixes the gripper at an appropriate height.
- The finger drive motor operates to wrap the fingers around the mushroom.
- Measure the size of the cap and classify the mushroom in situ.
- The rotation motor drives the gripper to rotate, detaching the stem.
- The lifting module operates to lift the mushroom.
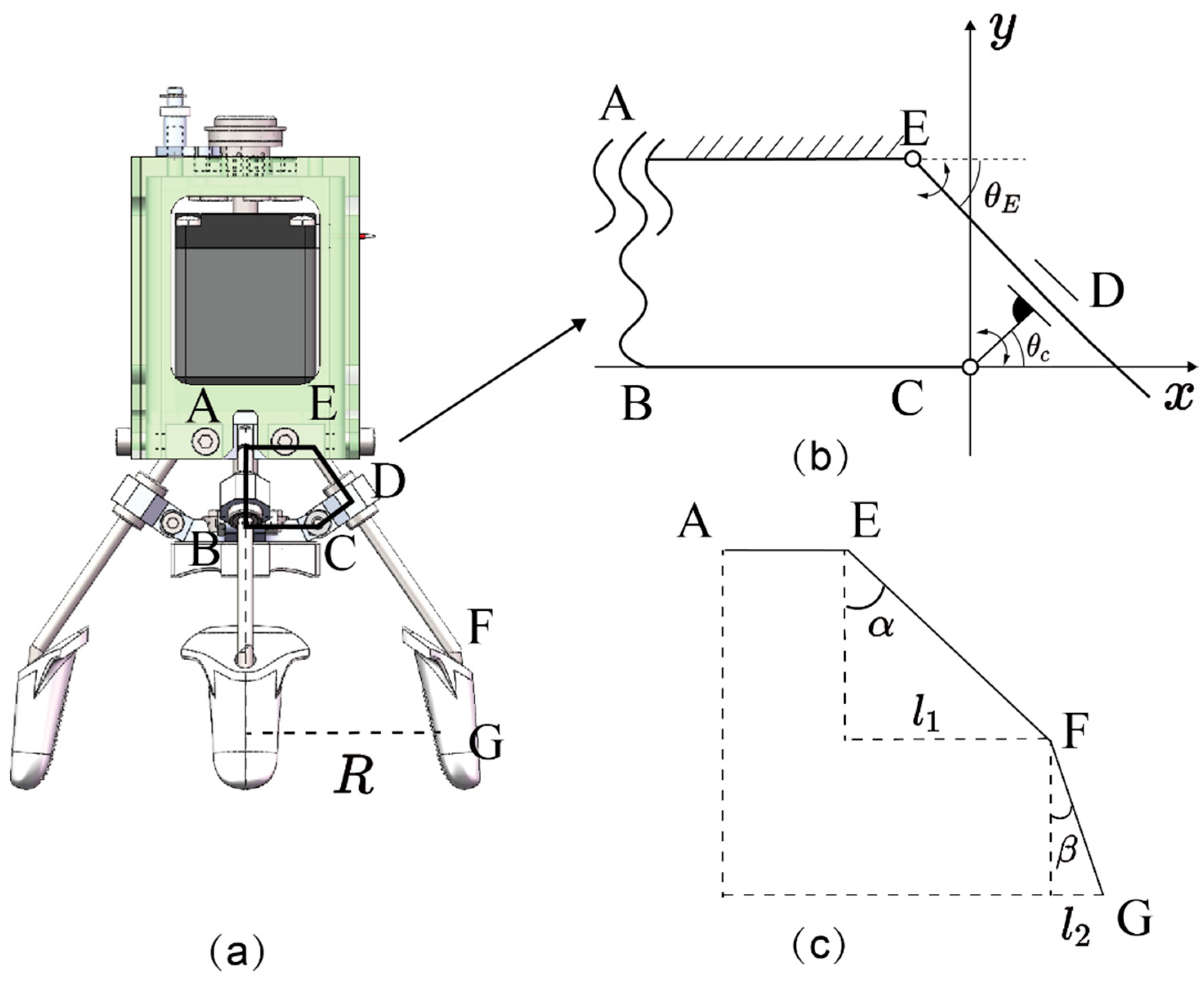
2.3. Kinematic Modeling and Measurement Methods
2.4. Dynamic Model
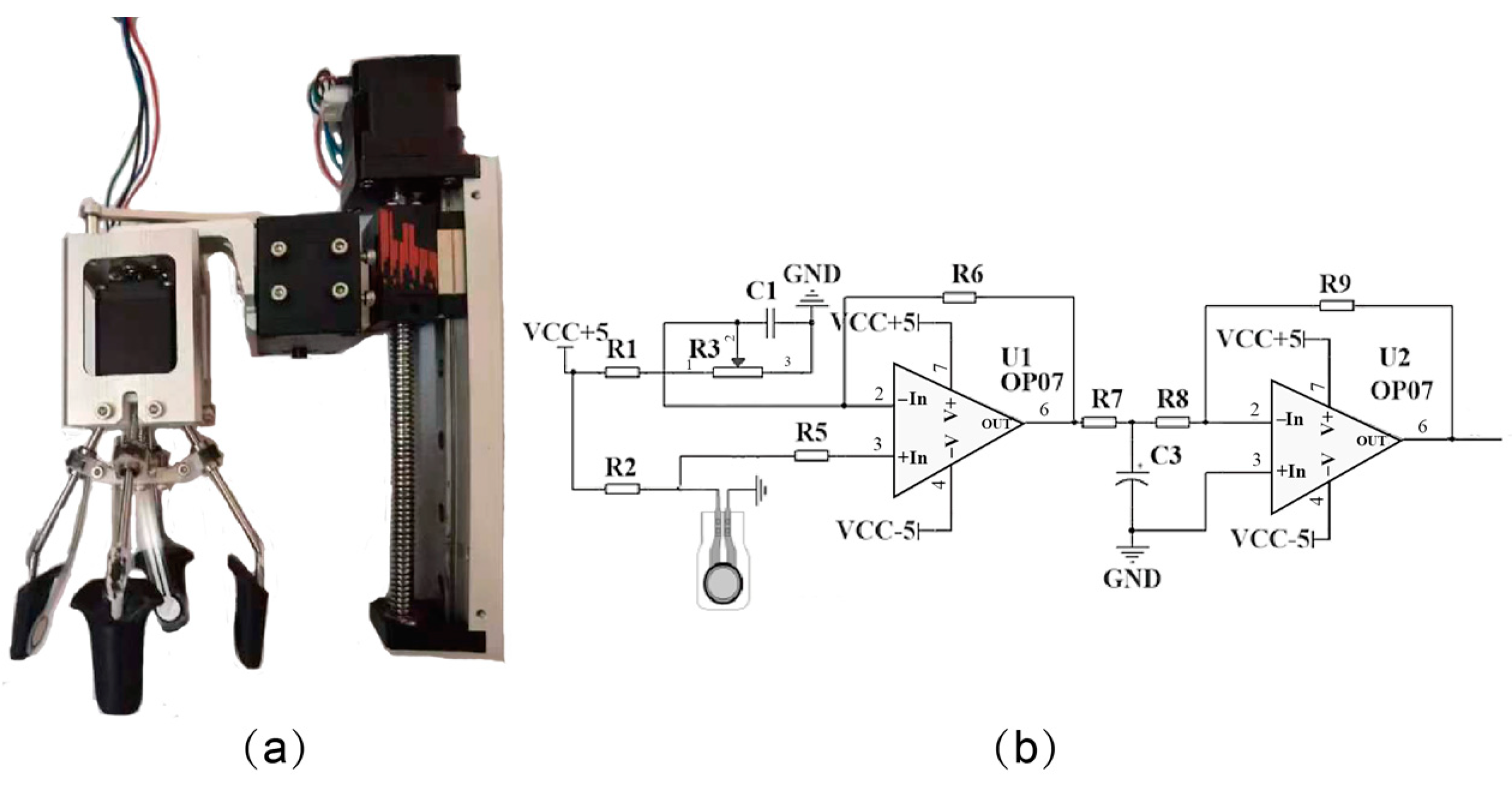
2.5. Soft Control
3. Experiment and Results
3.1. Mushroom Mechanism Test
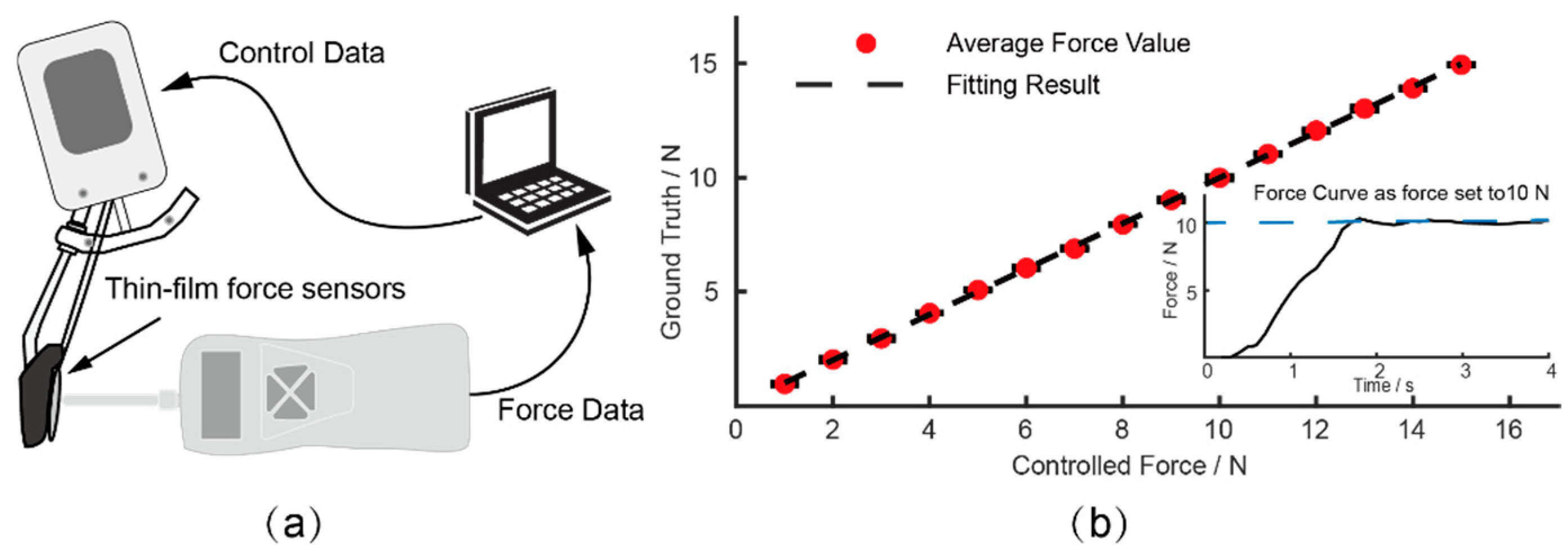
3.2. Force Control Accuracy
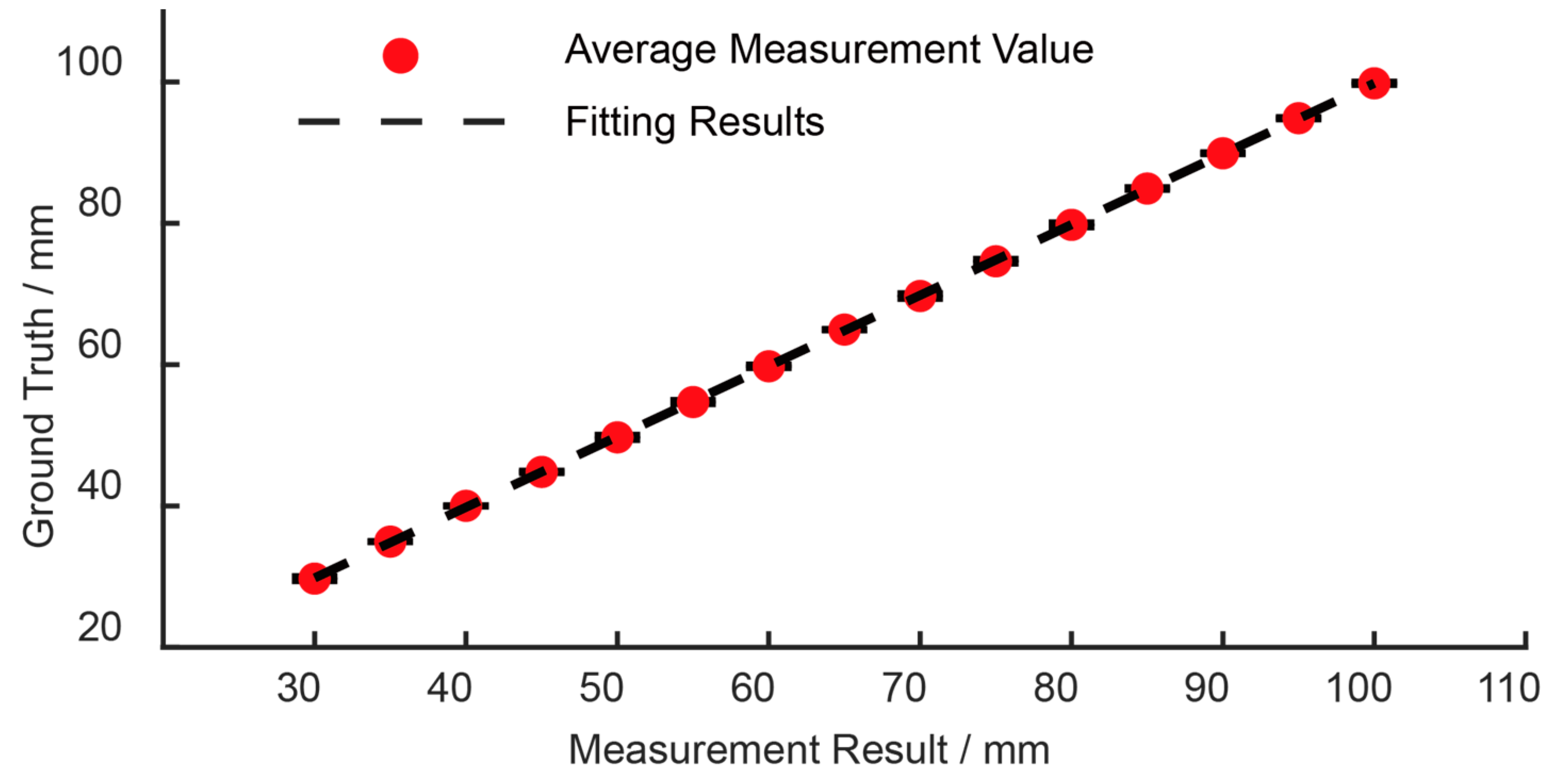
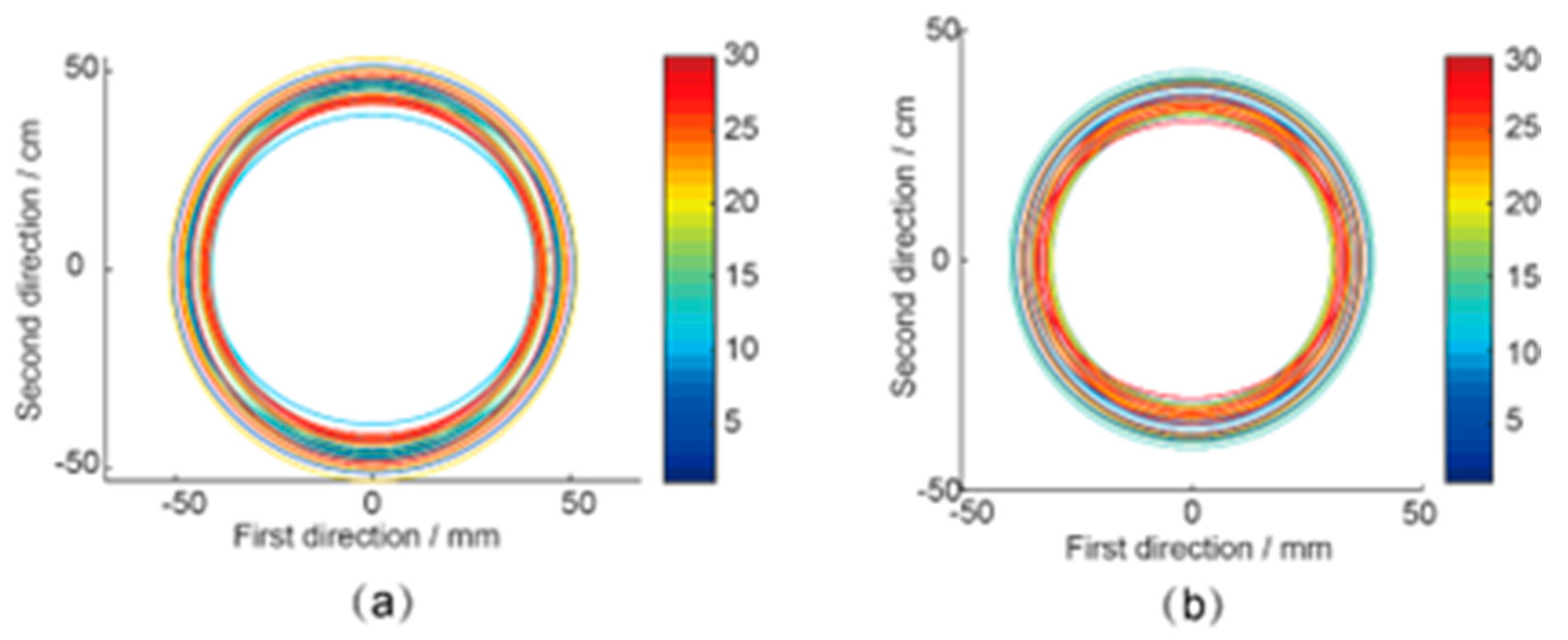
3.3. Diameter Measurement Accuracy
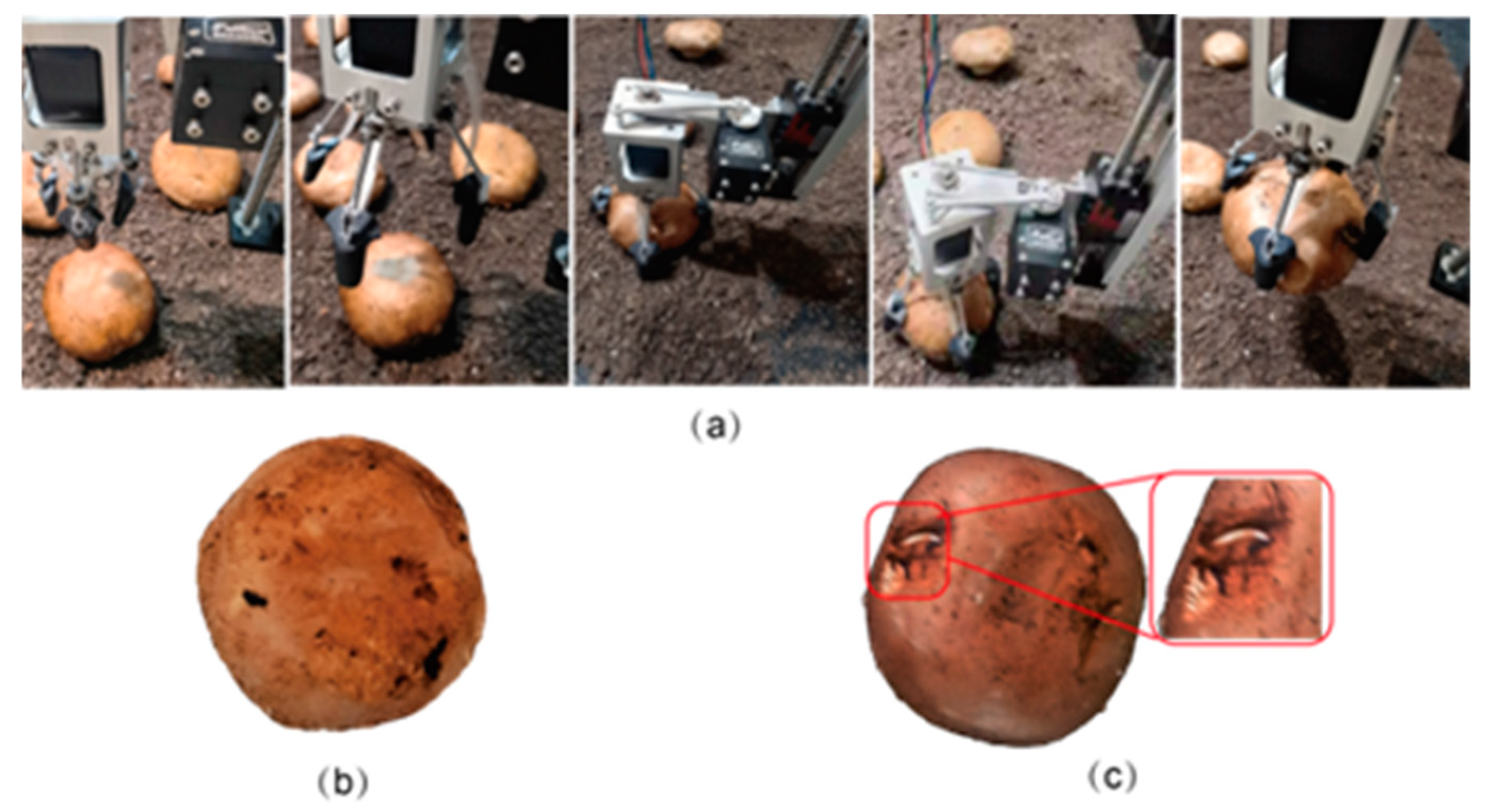
3.4. Field Picking Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Li, W.; Li, Z.; Wu, W.; Tang, X. Analysis and evaluation of the characteristic taste components in portobello mushroom. J. Food Sci. 2018, 83, 1542–1551. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Liang, H.; Luo, L. Antitumor polysaccharides from mushrooms: A review on the structural characteristics, antitumor mechanisms and immunomodulating activities. Carbohydr. Res. 2016, 424, 30–41. [Google Scholar] [CrossRef] [PubMed]
- Kalaras, M.D.; Richie, J.P.; Calcagnotto, A.; Beelman, R.B. Mushrooms: A rich source of the antioxidants ergothioneine and glutathione. Food Chem. 2017, 233, 429–433. [Google Scholar] [CrossRef] [PubMed]
- Royse, D.J.; Baars, J.; Tan, Q. Current overview of mushroom production in the world. In Edible and Medicinal Mushrooms: Technology and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 5–13. [Google Scholar]
- He, G.Q.; Wei, J.K.; Hu, X.Y.; Wu, S.J.; Zhao, H.K. Present situation and prospect of edible fungi industry development in China. Vegetables 2022, 4, 40–46. [Google Scholar]
- Gorgo-Simcox, M. Pennsylvania Mushroom Farmers Lead U.S. in Mushroom Production; Pennstate Extension: University Park, PA, USA, 2018. [Google Scholar]
- United States Department of Agriculture. Mushroom Annual Report; United States Department of Agriculture: Washington, DC, USA, 2019.
- Beghi, R.; Giovenzana, V.; Tugnolo, A.; Pessina, D.; Guidetti, R. Evaluation of energy requirements of an industrial scale plant for the cultivation of white button mushroom (Agaricus bisporus). J. Agric. Eng. 2020, 51, 57–63. [Google Scholar] [CrossRef]
- Li, Y. The status, opportunities and challenges of edible fungi industry in China: Develop with Chinese characteristics, realize the dream of powerful mushroom industrial country. J. Fungal Res. 2018, 16, 125–131. [Google Scholar]
- Ren, X.; Huang, B.; Yin, H. A review of the large-scale application of autonomous mobility of agricultural platform. Comput. Electron. Agric. 2023, 206, 107628. [Google Scholar] [CrossRef]
- Zangina, U.; Buyamin, S.; Abidin, M.; Mahmud, M. Agricultural rout planning with variable rate pesticide application in a greenhouse environment. Alex. Eng. J. 2021, 60, 3007–3020. [Google Scholar] [CrossRef]
- Lee, C.-H.; Choi, D.; Pecchia, J.; He, L.; Heinemann, P. Development of a mushroom harvesting assistance system using computer vision. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; p. 1. [Google Scholar]
- Lawrence, J.S. Rheumatism in Populations; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Chen, K.; Li, T.; Yan, T.; Xie, F.; Feng, Q.; Zhu, Q.; Zhao, C. A soft gripper design for apple harvesting with force feedback and fruit slip detection. Agriculture 2022, 12, 1802. [Google Scholar] [CrossRef]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive sliding mode path tracking control of unmanned rice transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Yue, R.; Hu, J.; Liu, Y.; Yao, M.; Zhang, T.; Shi, J. Design and Working Parameter Optimization of Pneumatic Reciprocating Seedling-Picking Device of Automatic Transplanter. Agriculture 2022, 12, 1989. [Google Scholar] [CrossRef]
- Zhu, W.; Feng, Z.; Dai, S.; Zhang, P.; Wei, X. Using UAV multispectral remote sensing with appropriate spatial resolution and machine learning to monitor wheat scab. Agriculture 2022, 12, 1785. [Google Scholar] [CrossRef]
- Liu, J.; Liang, J.; Zhao, S.; Jiang, Y.; Wang, J.; Jin, Y. Design of a Virtual Multi-Interaction Operation System for Hand–Eye Coordination of Grape Harvesting Robots. Agronomy 2023, 13, 829. [Google Scholar] [CrossRef]
- Zied, D.C.; Pardo-Giménez, A. (Eds.) Edible and Medicinal Mushrooms: Technology and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Reed, J.; Miles, S.; Butler, J.; Baldwin, M.; Noble, R. AE—Automation and emerging technologies: Automatic mushroom harvester development. J. Agric. Eng. Res. 2001, 78, 15–23. [Google Scholar] [CrossRef]
- Reed, J.; Tillett, R. Initial experiments in robotic mushroom harvesting. Mechatronics 1994, 4, 265–279. [Google Scholar] [CrossRef]
- Yang, S.; Ji, J.; Cai, H.; Chen, H. Modeling and force analysis of a harvesting robot for button mushrooms. IEEE Access 2022, 10, 78519–78526. [Google Scholar] [CrossRef]
- Burton, K. Cultural factors affecting mushroom quality-cause and control of bruising. Mushroom Sci. 2004, 16, 397–402. [Google Scholar]
- Weijn, A.; Tomassen, M.; Bastiaan-Net, S.; Wigham, M.; Boer, E.; Hendrix, E.; Baars, J.; Sonnenberg, A.; Wichers, H.; Mes, J. A new method to apply and quantify bruising sensitivity of button mushrooms. LWT 2012, 47, 308–314. [Google Scholar] [CrossRef]
- Huang, M.; Jiang, X.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Development of a robotic harvesting mechanism for button mushrooms. Trans. ASABE 2021, 64, 565–575. [Google Scholar] [CrossRef]
- Li, M.; Liu, P. A bionic adaptive end-effector with rope-driven fingers for pear fruit harvesting. Comput. Electron. Agric. 2023, 211, 107952. [Google Scholar] [CrossRef]
- Yang, K.; Yu, Z.; Luo, W.; Fan, J.; Li, Y.; Gu, F.; Zhang, Y.; Wang, S.; Peng, B.; Hu, Z. Experiment and Study of Garlic Root Cutting Based on Continuous Force Feedback. Agronomy 2023, 13, 835. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, Z.; Wang, Y.; Bao, R.; Chen, X.; Fu, S.; Tian, M.; Zhang, Y. Research on flexible end-effectors with humanoid grasp function for small spherical fruit picking. Agriculture 2023, 13, 123. [Google Scholar] [CrossRef]
- Huang, M.; Jiang, X.; He, L.; Choi, D.; Pecchia, J. Hand-picking Dynamic Analysis for Robotic Agaricus Mushroom Harvesting. In Proceedings of the 2020 ASABE Annual International Virtual Meeting, Virtual, 13–15 July 2020; p. 1. [Google Scholar]
- Li, J.; Feng, Q.; Ru, M.; Sun, J.; Guo, X.; Zheng, W. Design of Shiitake Mushroom Robotic Picking Grasper: Considering Stipe Compressive Stress Relaxation. Machines 2024, 12, 241. [Google Scholar] [CrossRef]
- Wang, Z.; Tao, K.; Yuan, J.; Liu, X. Design and experiment on mechanized batch harvesting of Shiitake mushrooms. Comput. Electron. Agric. 2024, 217, 108593. [Google Scholar] [CrossRef]
- Wang, L.; Xu, W.; Du, K.; Lu, W.; Zhu, J.; Zhang, J. Portabella Mushrooms Measurement in Situ Based on SR300 Depth Camera. Trans. Chin. Soc. Agric. Mach. 2018, 49, 13–19+108. [Google Scholar]
- Lu, W.; Zou, M.; Shi, H.; Wang, L.; Deng, Y. Technology of visual identification—Measuring—Location for brown mushroom picking based on YOLO v5—TL. Trans. Chin. Soc. Agric. Mach. 2022, 53, 341–348. [Google Scholar]
- Ji, Q.; Lu, W.; Song, A.; Wang, P.; Ding, Y.; Wang, L. Design of An Intelligent Soft Gripper for On-line Measurement of Fruit Size. Jiangsu J. Agric. Sci. 2020, 36, 455–462. [Google Scholar]
- Gao, J.; Zhang, F.; Zhang, J.; Yuan, T.; Yin, J.; Guo, H.; Yang, C. Development and evaluation of a pneumatic finger-like end-effector for cherry tomato harvesting robot in greenhouse. Comput. Electron. Agric. 2022, 197, 106879. [Google Scholar] [CrossRef]
- Zhu, Y.; Feng, K.; Hua, C.; Wang, X.; Hu, Z.; Wang, H.; Su, H. Model analysis and experimental investigation of soft pneumatic manipulator for fruit grasping. Sensors 2022, 22, 4532. [Google Scholar] [CrossRef]
- Brown, J.; Sukkarieh, S. Design and evaluation of a modular robotic plum harvesting system utilizing soft components. J. Field Robot. 2021, 38, 289–306. [Google Scholar] [CrossRef]
- Wang, Z.; Xun, Y.; Wang, Y.; Yang, Q. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar]
- Kondoyanni, M.; Loukatos, D.; Maraveas, C.; Drosos, C.; Arvanitis, K.G. Bio-inspired robots and structures toward fostering the modernization of agriculture. Biomimetics 2022, 7, 69. [Google Scholar] [CrossRef] [PubMed]
- Yi, J.; Kim, B.C.; Cho, K.J.; Park, Y.L. Underactuated robotic gripper with fiber-optic force sensing tendons. IEEE Robot. Autom. Lett. 2023, 8, 7607–7614. [Google Scholar] [CrossRef]
- Xu, H.; Yu, G.; Niu, C.; Zhao, X.; Wang, Y.; Chen, Y. Design and experiment of an underactuated broccoli-picking manipulator. Agriculture 2023, 13, 848. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- den Ouden, M. Mushroom Signals: A Practical Guide to Optimal Mushroom Growing; Roodbont Publishers BV: Zutphen, The Netherlands, 2016. [Google Scholar]
- Gans, D. Analytical Kinematics: Analysis and Synthesis of Planar Mechanisms; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Budinski, K.G. Guide to Friction, Wear and Erosion Testing; ASTM International: West Conshohocken, PA, USA, 2007. [Google Scholar]
- Åström, K.J.; Hägglund, T. Revisiting the Ziegler–Nichols step response method for PID control. J. Process Control 2004, 14, 635–650. [Google Scholar] [CrossRef]
- Huang, M.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Picking dynamic analysis for robotic harvesting of Agaricus bisporus mushrooms. Comput. Electron. Agric. 2021, 185, 106145. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variety | Cap Diameter | Open Cap | Classification |
|---|---|---|---|
| Cremini mushroom | <6 cm | No | I |
| Portabellini mushroom | 6–8 cm | No | II |
| Portobello mushroom | 8–10 cm | No | III |
| Continue to grow | >10 cm | Yes | Low value |
| Parameter | Value |
|---|---|
| Gravity G/N | 2 ± 0.05 |
| Poisson’s Ratio v | 0.325 ± 0.01 |
| Elastic Modulus E/MPa | 1.49 ± 0.03 |
| Coefficient of Sliding Friction μ | 2 ± 0.05 |
| Tensile Force at Root fg/N | 1.8 ± 0.12 |
| Rupture Force of Cap fs/N | 25 ± 0.37 |
| Tensile Force of Cap fi/N | 8 ± 0.24 |
| Torque for Soil–Stem Separation T1 (N·m) | 0.006 ± 0.0005 |
| Torque for Cap–Stem Separation T2 (N·m) | 0.048 ± 0.03 |
| Parameter | Test 1 | Test 2 | Test 3 | Average Value |
|---|---|---|---|---|
| Detachment Force Overshoot | 1.40 N | 1.21 N | 1.32 N | 1.31 N |
| Damage Rate | 0% | 0% | 5% | 1.67% |
| Picking Success Rate | 100% | 100% | 95% | 98.3% |
| Diameter Accuracy | 98.1% | 97.4% | 96.5% | 97.3% |
| Picking Time | 8.05 s | 8.15 s | 8.22 s | 8.14 s |
| Author | Structure | Actuation | In Situ Measurement | Force Control | Success Rate | Damage Rate |
|---|---|---|---|---|---|---|
| This work | Rigid | Motor-driven | Yes | Yes | 98.3% | 1.67% |
| Ours [34] | Rubber gripper | Positive pneumatic | Yes | Yes | No application | No application |
| Yang et al. [22] | Suction cup | Negative pneumatic | No | No | 88.2% | 2.9% |
| Reed et al. [20] | Suction cup | Negative Pneumatic | No | No | 80% | Not mentioned |
| Huang et al. [47] | Suction cup | Negative Pneumatic | No | No | 100% | Not mentioned |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Xu, G.; Lu, W.; Ding, Q.; Chen, X. An Electric Gripper for Picking Brown Mushrooms with Flexible Force and In Situ Measurement. Agriculture 2024, 14, 1181. https://doi.org/10.3390/agriculture14071181
Shi H, Xu G, Lu W, Ding Q, Chen X. An Electric Gripper for Picking Brown Mushrooms with Flexible Force and In Situ Measurement. Agriculture. 2024; 14(7):1181. https://doi.org/10.3390/agriculture14071181
Chicago/Turabian StyleShi, Haonan, Gaoming Xu, Wei Lu, Qishuo Ding, and Xinxin Chen. 2024. "An Electric Gripper for Picking Brown Mushrooms with Flexible Force and In Situ Measurement" Agriculture 14, no. 7: 1181. https://doi.org/10.3390/agriculture14071181
APA StyleShi, H., Xu, G., Lu, W., Ding, Q., & Chen, X. (2024). An Electric Gripper for Picking Brown Mushrooms with Flexible Force and In Situ Measurement. Agriculture, 14(7), 1181. https://doi.org/10.3390/agriculture14071181