
Impact of Structural Parameters on the Collision Characteristics and Coefficient of Restitution of Soybean Particles on Harvester’s Cleaning Screens


 and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Materials and Test Platform
2.1.1. Basic Parameters of Soybeans
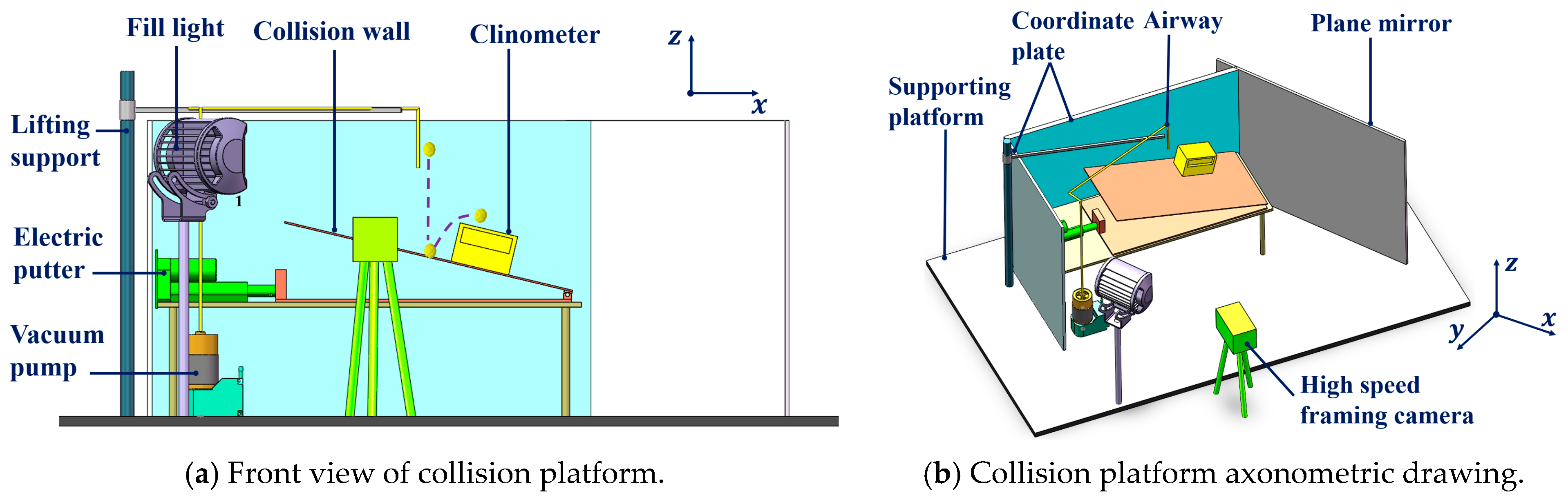
2.1.2. Soybean Particle Collision Platform
2.2. Simulation Platform
2.2.1. Three-Dimensional Model of Soybeans
2.2.2. EDEM Simulation of Soybean Particles Colliding with Moving Walls
2.3. Calculation Method
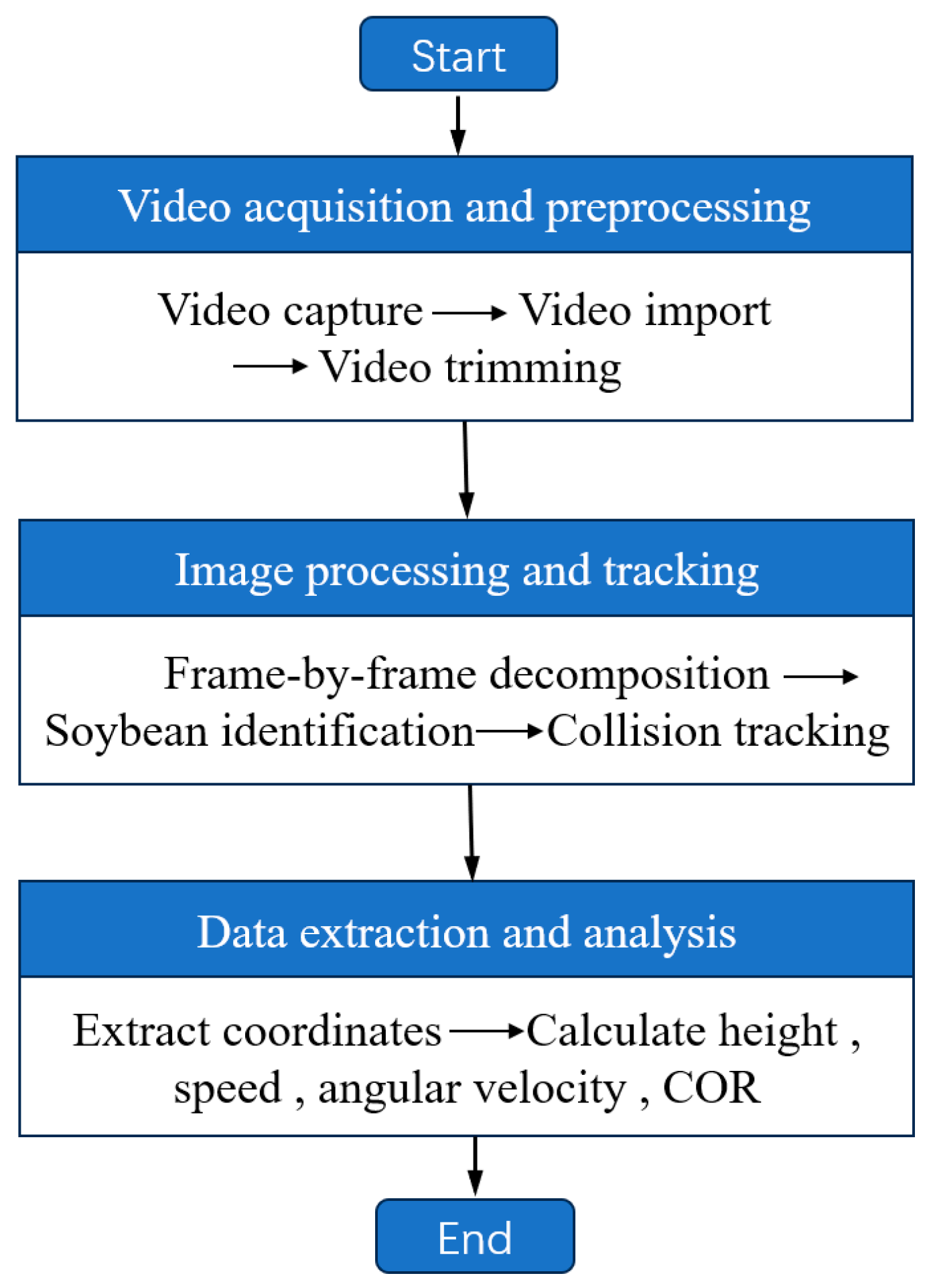
2.3.1. High-Speed Image Processing
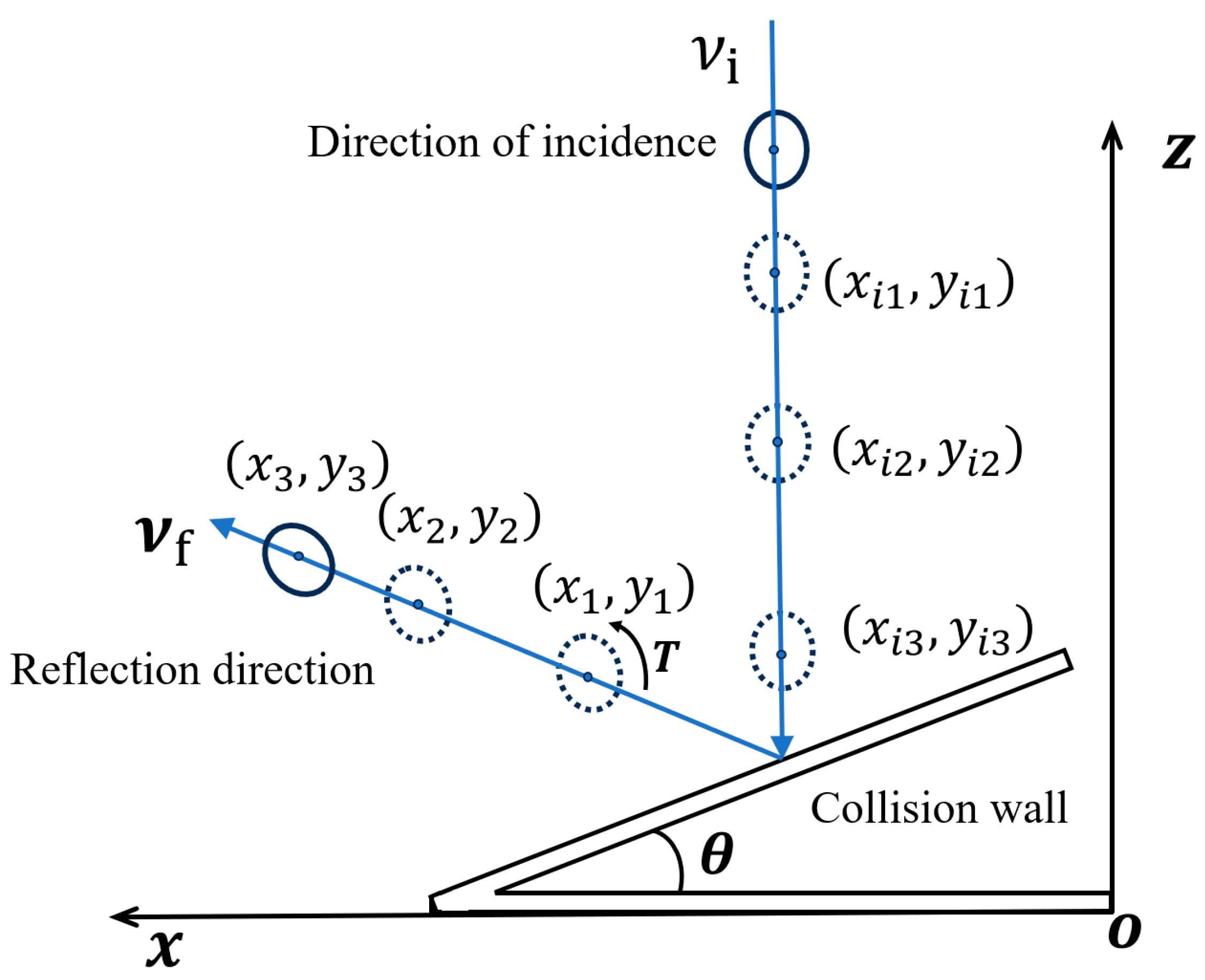
2.3.2. Soybean Collision Velocity
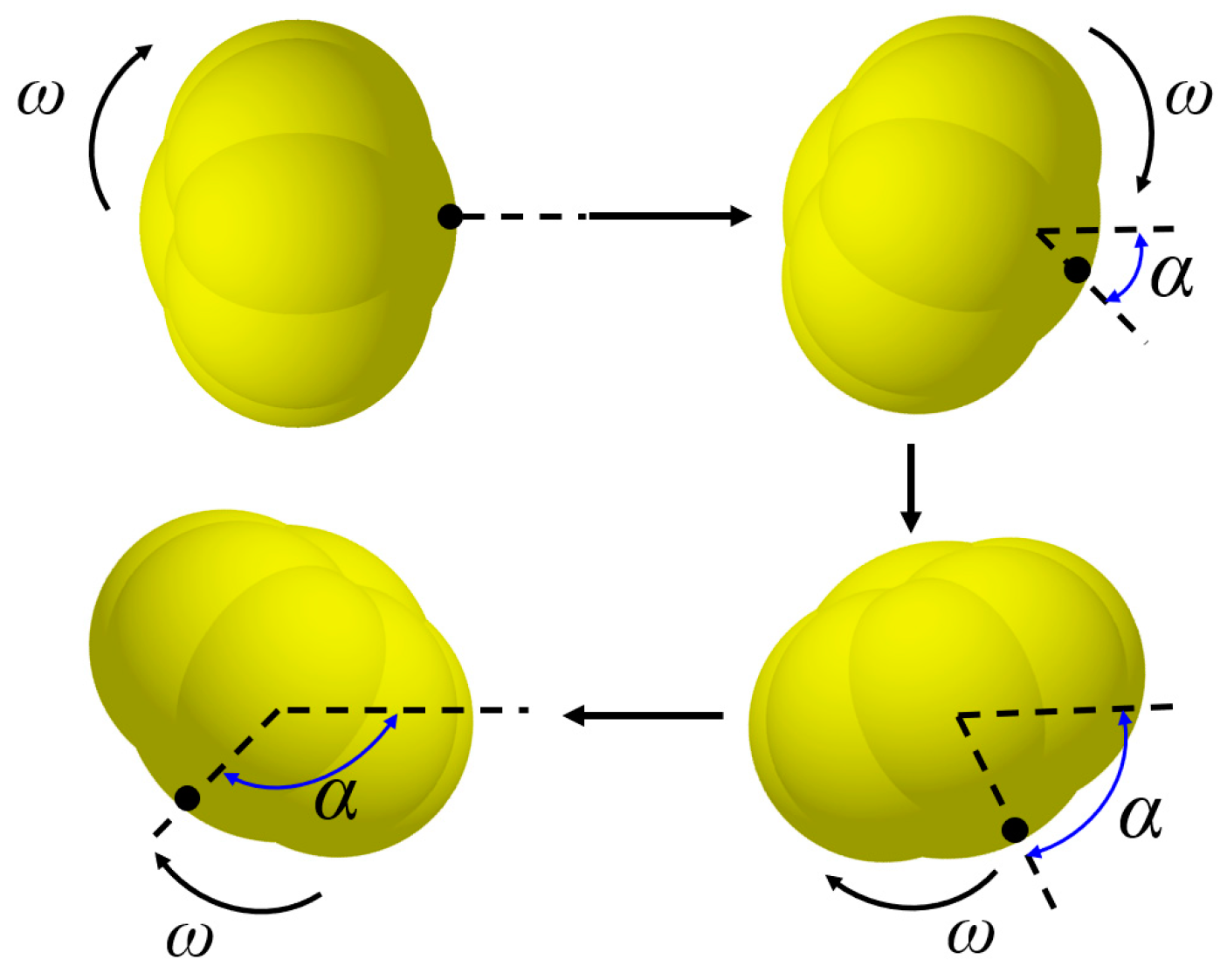
2.3.3. Rotational Angular Velocity
2.3.4. Coefficient of Restitution (COR)
3. Results and Discussion
3.1. Collision and Rebound Characteristics of Soybeans with the Wall
3.1.1. Force and Energy Analysis during Collision
3.1.2. The Influence of Wall Velocity on Collision Rebound Height
3.1.3. The Influence of Inclination Angle on Collision Rebound Height
3.1.4. Effect of Inclination Angle on Angular Velocity
3.1.5. Effect of Wall Speed on Angular Velocity
3.2. Characteristics of COR with Varying Single Factors
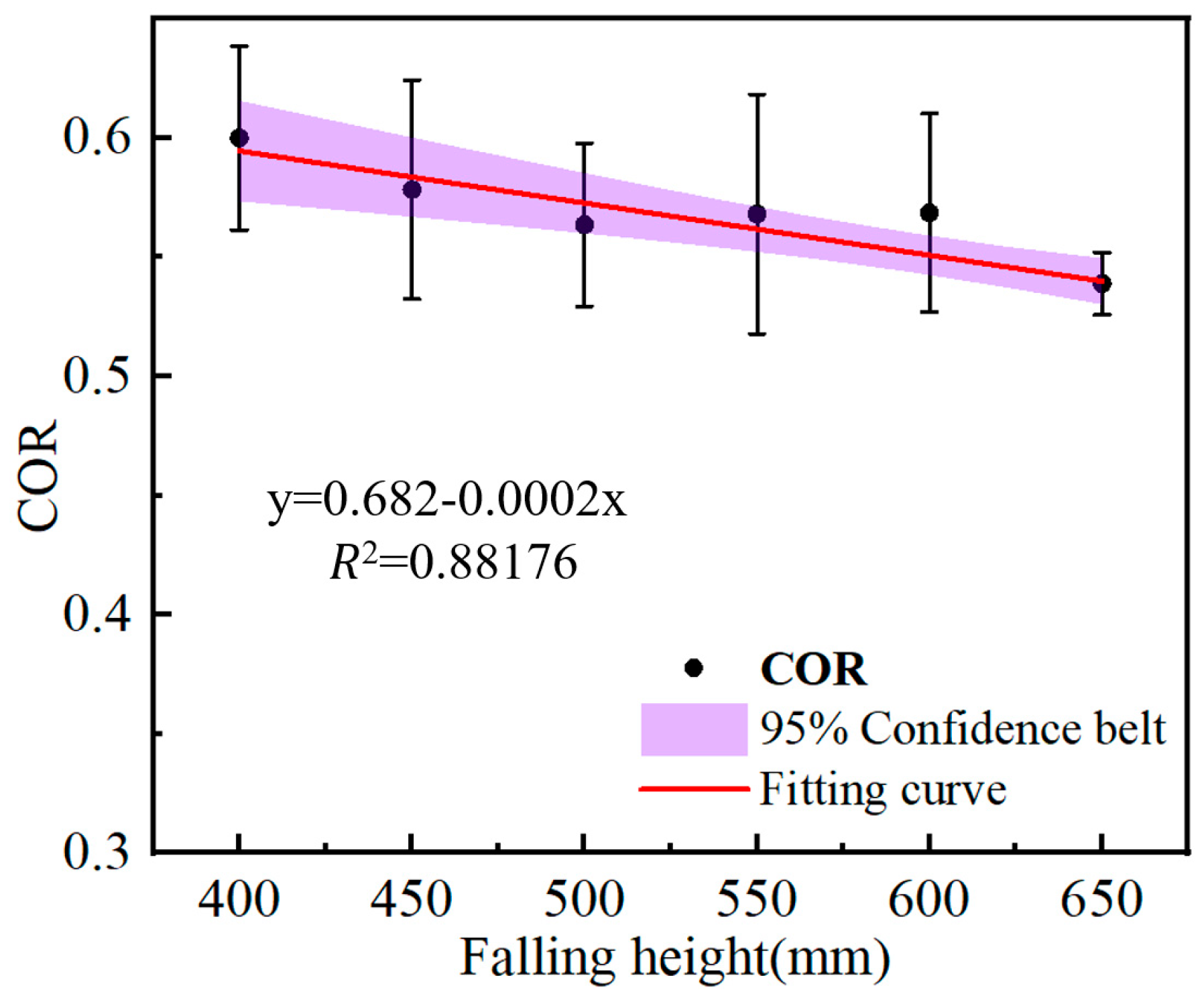
3.2.1. Effect of Soybean Drop Height on COR
3.2.2. Effect of Wall Inclination Angle on COR
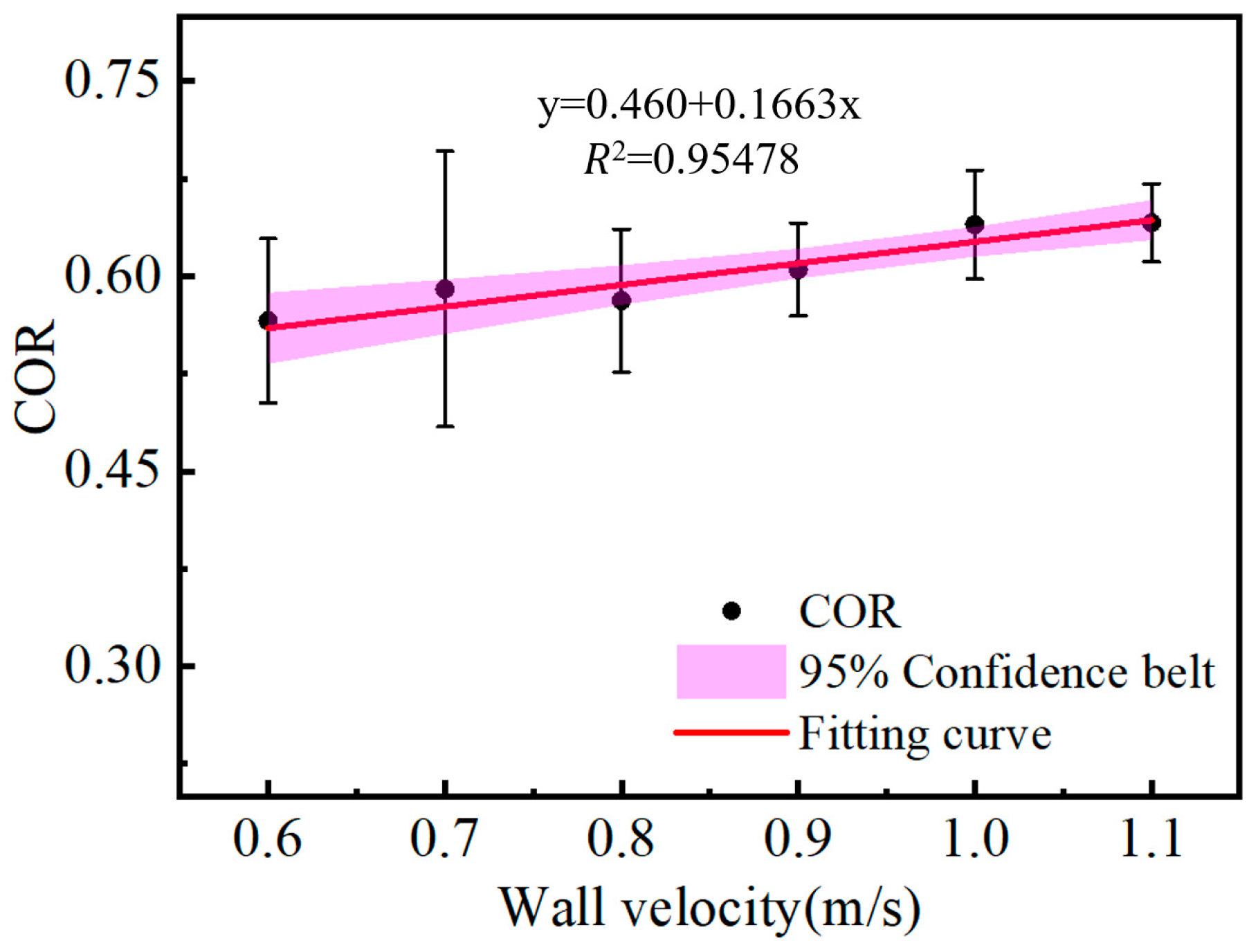
3.2.3. Effect of Wall Movement Speed on COR
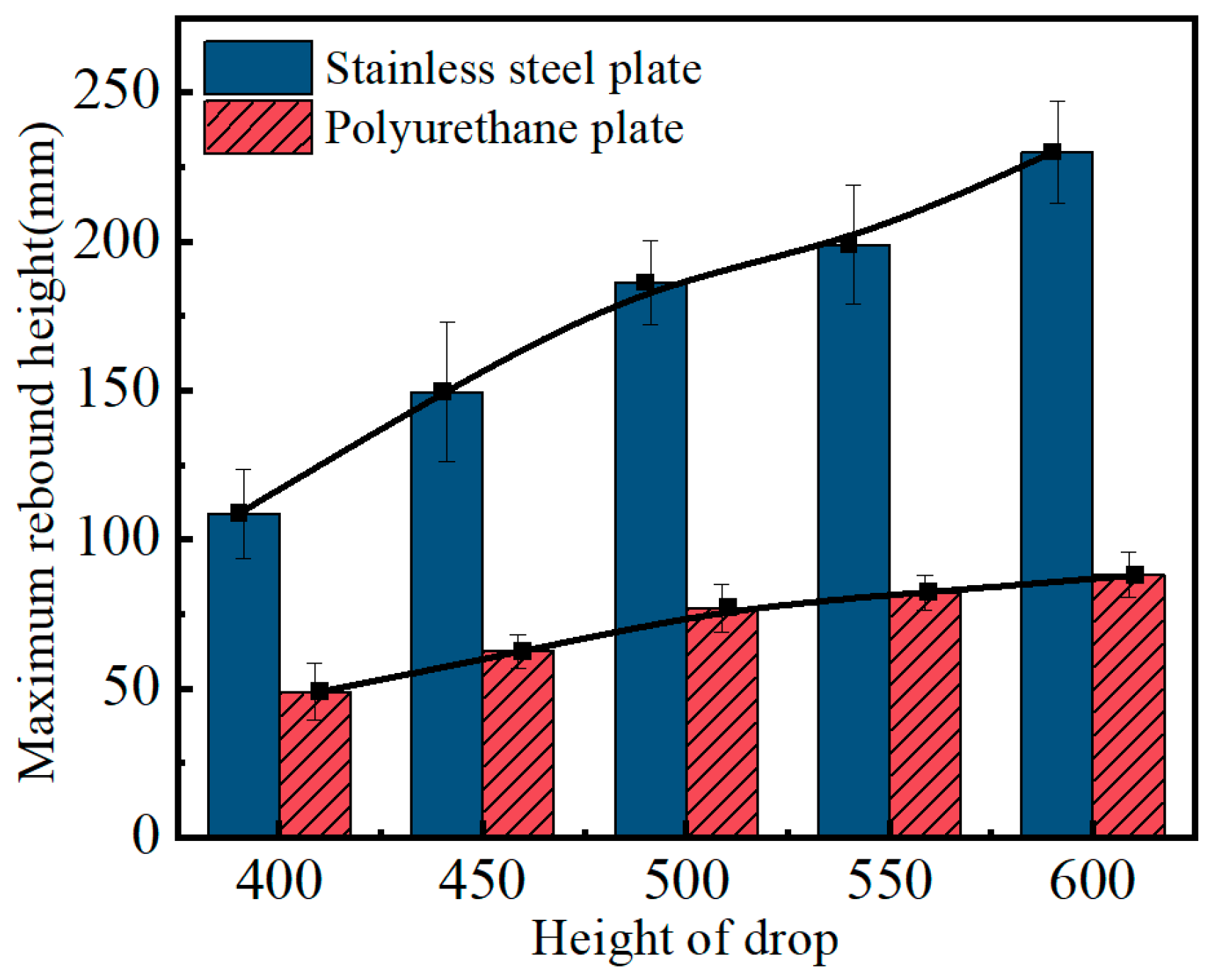
3.2.4. Effect of Wall Material on COR
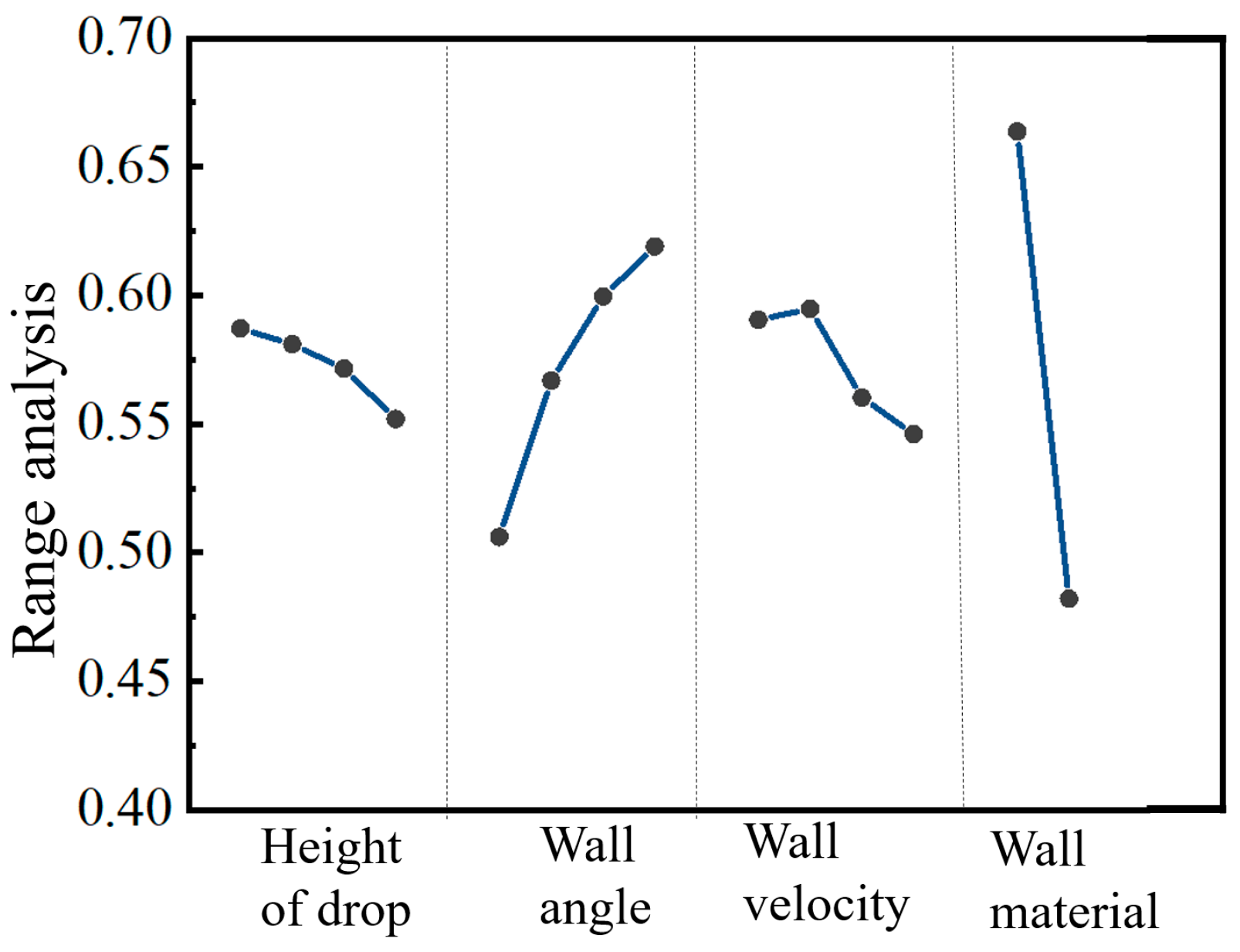
3.3. Orthogonal Experiment on COR
4. Conclusions
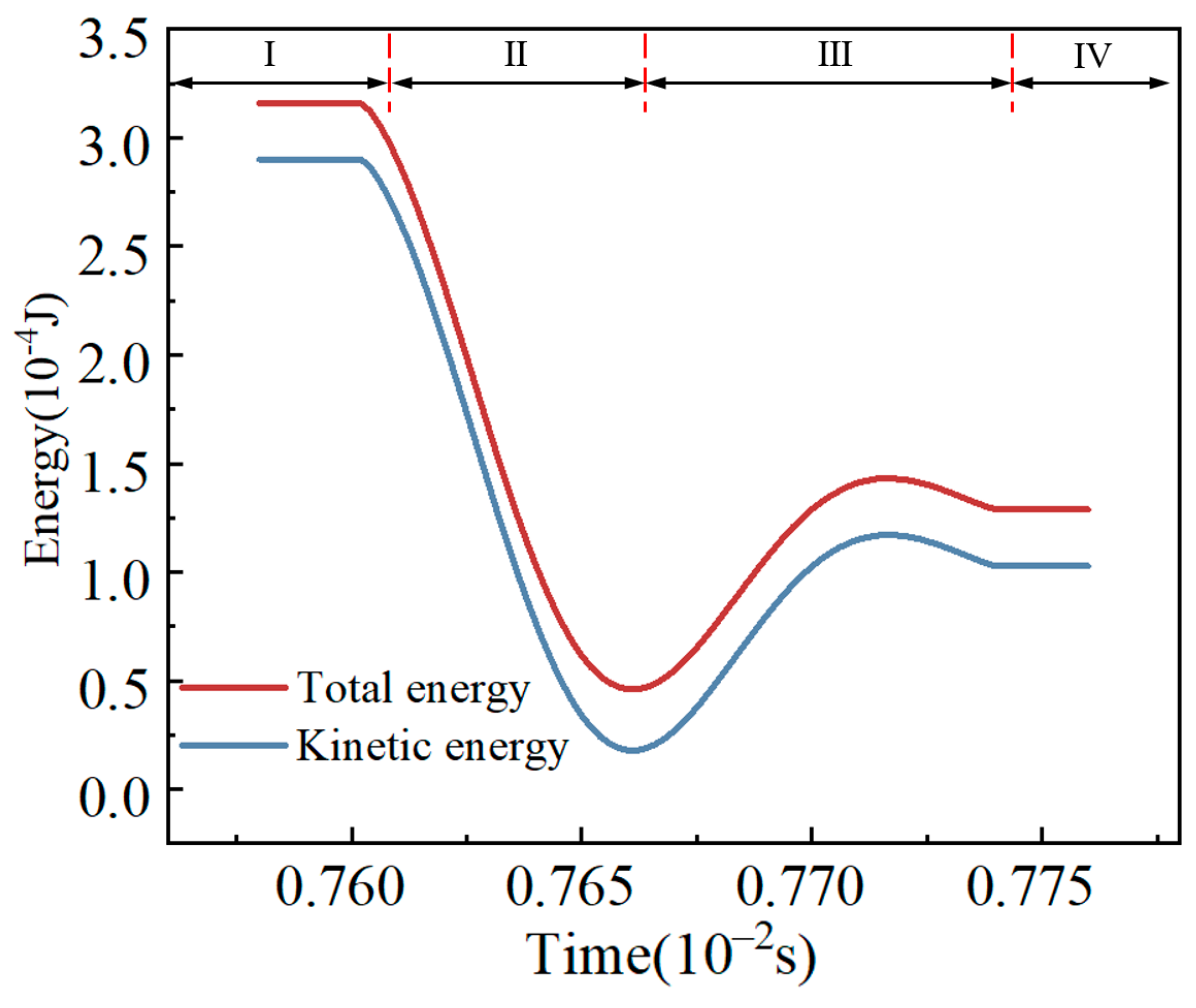
- The collision between soybeans and the wall can be divided into four stages: Pre-collision stage: Soybeans are in a free-fall state, with the maximum potential energy determined by the initial height of the soybeans, and the total energy is essentially conserved. Compression stage: After colliding with the wall, soybeans undergo compression deformation, resulting in a rapid decrease in kinetic energy, which is converted into elastic potential energy and partial internal energy. Additionally, a torque T is generated. Recovery stage: After reaching maximum elastic deformation, soybeans begin to recover, gradually increasing their kinetic energy, while the collision force rapidly weakens and the torque correspondingly decreases. Post-collision stage: As the soybean separates from the wall and is subjected to gravity, its speed gradually decreases, resulting in reduced kinetic energy and increased gravitational potential energy. Due to friction, some of the energy is converted into heat and lost. The total energy shows a decreasing trend, with the rebound energy gradually diminishing until the motion stops.
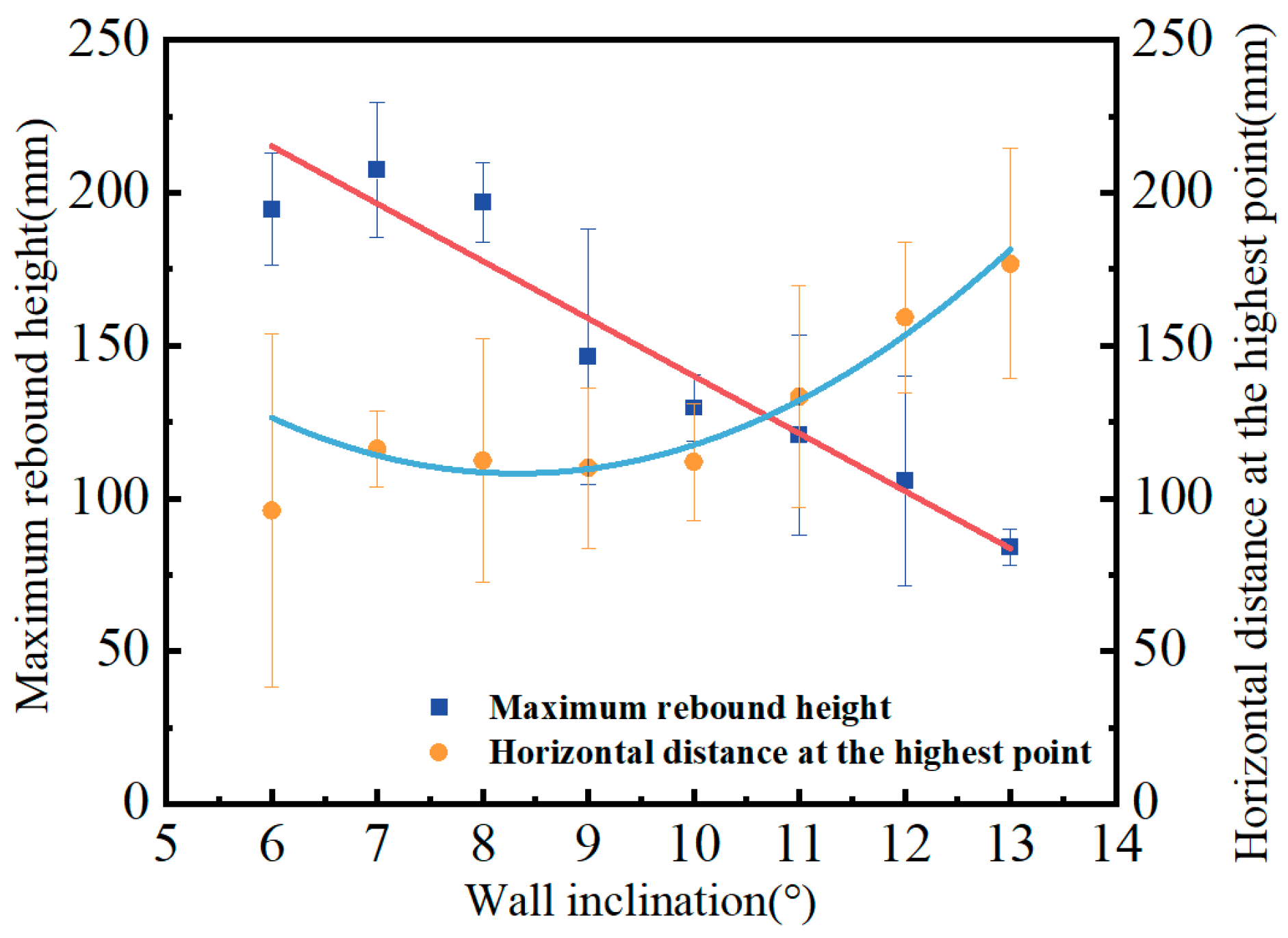
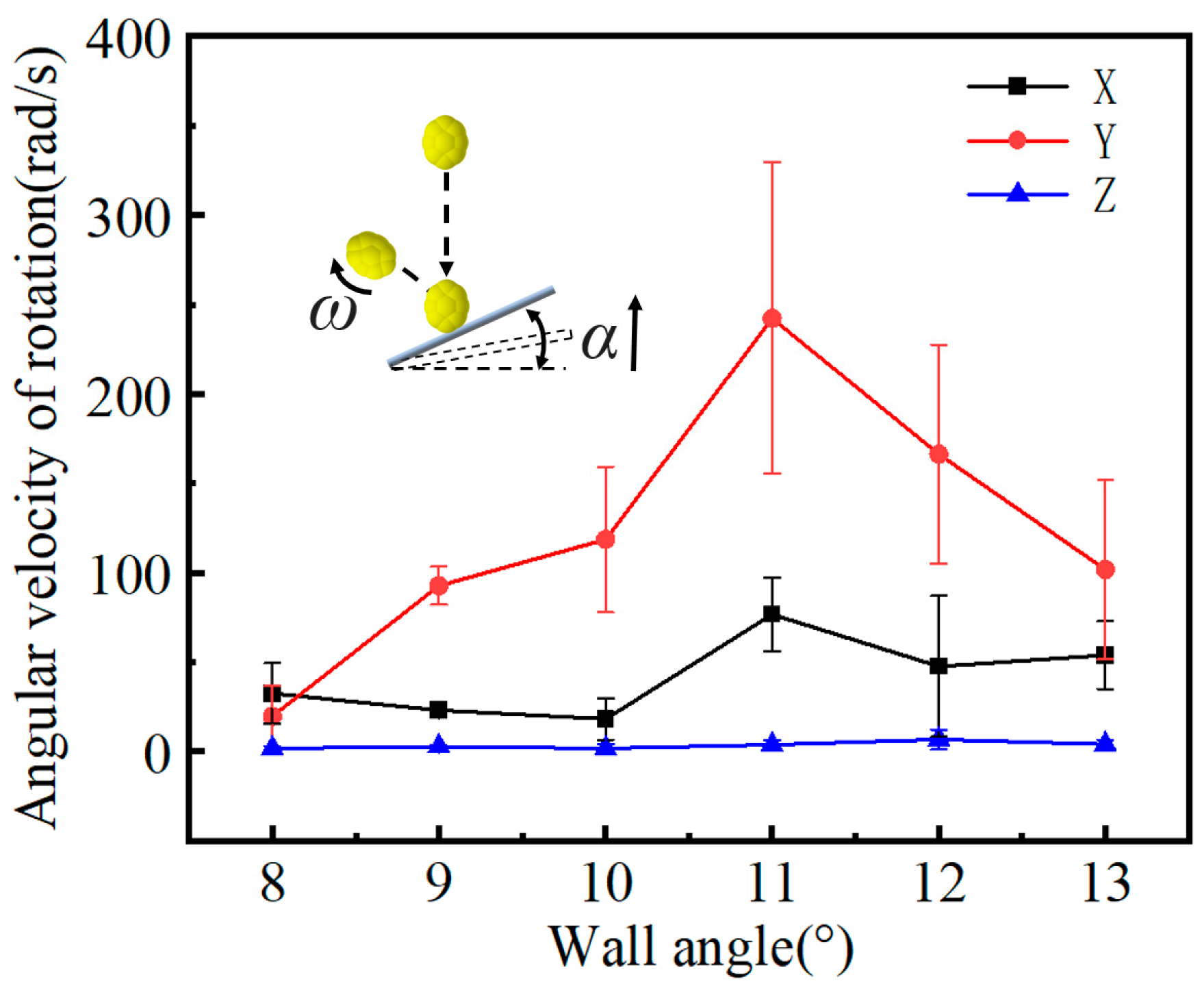
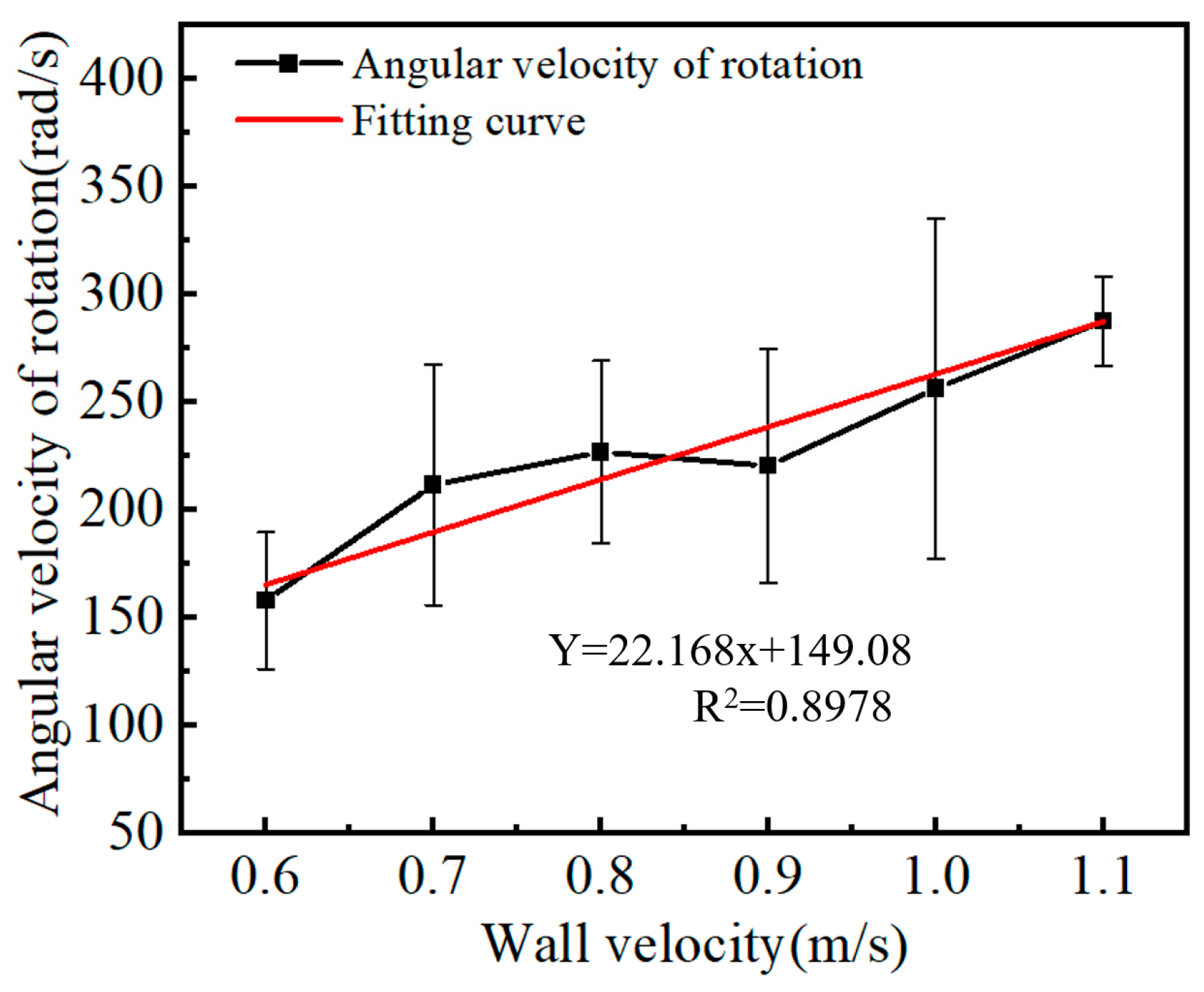
- The rebound height from collisions can intuitively reflect the collision characteristics of soybeans, whereas the experimental finding indicated that the key factors influencing the coefficient of restitution (COR) of soybeans, in order of importance, are: wall material > wall angle > wall speed > drop height. Regardless of the conditions, the COR value of soybeans colliding with polyurethane boards is less than that with stainless steel boards. As the wall speed increases, the maximum rebound height of soybeans decreases, the corresponding horizontal distance gradually increases, and the rotational angular velocity also gradually increases. When the wall angle increases, the maximum rebound height of soybeans shows a linear downward trend, but the horizontal distance changes slowly before 10° and increases rapidly after exceeding 10°. In the range of 8°–11°, the y-direction angular velocity significantly increases, the x-direction angular velocity increases slowly, and the z-direction angular velocity remains almost unchanged; beyond 11°, the y-direction angular velocity rapidly decreases, the x-direction angular velocity slowly decreases, and the z-direction angular velocity slightly increases. As the drop height of soybeans increases, the COR gradually decreases; as the wall angle and wall speed increase, the COR also increases. By studying the bouncing behavior of soybeans and their coefficient of restitution (COR) on cleaning sieves, it is possible to more accurately predict the motion trajectory of soybeans on the sieve surface, which helps in designing more effective screening structures. This research also provides a basis for selecting the installation angle, aperture size, and material of the cleaning sieve, which aids in optimizing the screening process to ensure effective separation and screening efficiency of soybeans. Additionally, accurate COR values can provide essential parameters for the use of simulation software such as EDEM.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Q.; Wang, F.; Yi, Q.; Zhang, X.; Chen, S.; Zheng, J.; Peng, D. Modeling soybean cultivation suitability in China and its future trends in climate change scenarios. J. Environ. Manag. 2023, 345, 118934. [Google Scholar] [CrossRef]
- Pereira, R.P.T.; Galo, N.R.; Filimonau, V. Food loss and waste from farm to gate in Brazilian soybean production. J. Agric. Food Res. 2022, 10, 100431. [Google Scholar]
- Feng, L.; Wang, H.; Ma, X.; Peng, H.; Shan, J. Modeling the current land suitability and future dynamics of global soybean cultivation under climate change scenarios. Field Crops Res. 2021, 263, 108069. [Google Scholar] [CrossRef]
- Kou, H.; Liao, Z.; Zhang, H.; Lai, Z.; Liu, Y.; Kong, H.; Fan, J. Grain yield, water-land productivity and economic profit responses to row configuration in maize-soybean strip intercropping systems under drip fertigation in arid northwest China. Agric. Water Manag. 2024, 297, 108817. [Google Scholar] [CrossRef]
- Liang, Z.; Wada, M.E. Development of cleaning systems for combine harvesters: A review. Biosyst. Eng. 2023, 236, 79–102. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Lv, L.; Shi, Y.; Yu, X. Study on Modeling Method of a Multi-Parameter Control System for Threshing and Cleaning Devices in the Grain Combine Harvester. Agriculture 2022, 12, 14839. [Google Scholar] [CrossRef]
- Liang, Y.; Tang, Z.; Zhang, H.; Li, Y.; Ding, Z.; Su, Z. Cross-flow fan on multi-dimensional airflow field of air screen cleaning system for rice grain. Int. J. Agric. Biol. Eng. 2022, 15, 223–235. [Google Scholar] [CrossRef]
- Liu, J.; Jing, C.; Liang, S.; Ni, Y. Research status of soybean mechanical harvest loss. J. Agric. Mech. Res. 2017, 7, 1–9+15. [Google Scholar]
- Zhang, J.; Cheng, H.; Ji, W.; Hou, S. Experimental study on suspension velocity of soybean extrusions. J. Agric. Mech. Res. 2013, 127–131. [Google Scholar] [CrossRef]
- Fu, H.; Yang, J.; Du, W.; Wang, W.; Liu, G.; Yang, Z. Determination of coefficient of restitution of fresh market apples caused by fruit-to-fruit collisions with a sliding method. Biosyst. Eng. 2022, 224, 183–196. [Google Scholar] [CrossRef]
- Zhou, F.; Feng, L.; Zhang, Q.; Gao, K. Collision characteristics of coal particles in arc-shaped plug elbow for pneumatic conveying. Adv. Powder Technol. 2024, 35, 104480. [Google Scholar] [CrossRef]
- Cao, X.; Li, Z.; Li, H.; Wang, X.; Ma, X. Measurement and calibration of the parameters for discrete element method modeling of rapeseed. Processes 2021, 9, 605. [Google Scholar] [CrossRef]
- Du, C.; Han, D.; Song, Z.; Chen, Y.; Chen, X.; Wang, X. Calibration of contact parameters for complex shaped fruits based on discrete element method: The case of pod pepper (Capsicum annuum). Biosyst. Eng. 2023, 226, 43–54. [Google Scholar] [CrossRef]
- Wu, Z.; Li, G.; Yang, R.; Fu, L.; Li, R.; Wang, S. Coefficient of restitution of kiwifruit without external interference. J. Food Eng. 2022, 327, 111060. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, X.; Liang, R.; Li, J.; Wang, X.; Meng, H.; Kan, Z. Cotton stalk restitution coefficient determination tests based on the binocular high-speed camera technology. Int. J. Agric. Biol. Eng. 2022, 15, 181–189. [Google Scholar] [CrossRef]
- Liu, Y.; Zong, W.; Ma, L.; Huang, X.; Li, M.; Tang, C. Determination of three-dimensional collision restitution coefficient of oil sunflower grain by high-speed photography. Nongye Gongcheng Xuebao/Transations Chin. Soc. Agric. Eng. 2020, 36, 44–53. [Google Scholar]
- Yan, D.; Yu, J.; Wang, Y.; Zhou, L.; Sun, K.; Tian, Y. A review of the application of discrete element method in agricultural engineering: A case study of soybean. Processes 2022, 10, 1305. [Google Scholar] [CrossRef]
- Benque, B.; Orefice, L.; Forgber, T.; Habeler, M.; Schmid, B.; Remmelgas, J.; Khinast, J. Improvement of a pharmaceutical powder mixing process in a tote blender via DEM simulations. Int. J. Pharm. 2024, 658, 124224. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Wang, G.; Sun, G.; Wang, S.; Guan, W.; Chen, Z. DEM simulation and optimization of crushing chamber shape of gyratory crusher based on Ab-t10 model. Miner. Eng. 2024, 209, 108606. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, Z.; Yu, Y.; Liu, T.; Zhang, Z. Determination of the energetic coefficient of restitution of maize grain based on laboratory experiments and DEM simulations. Powder Technol. 2020, 362, 645–658. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, W.; Ding, Z.; Li, X.; Zhang, C. Experimental determination of parameter effects on the coefficient of restitution of differently shaped maize in three-dimensions. Powder Technol. 2015, 284, 187–194. [Google Scholar] [CrossRef]
- Li, D.; Wang, Z.; Liang, Z.; Zhu, F.; Xu, T.; Cui, X.; Zhao, P. Analyzing rice grain collision behavior and monitoring mathematical model development for grain loss sensors. Agriculture 2022, 12, 839. [Google Scholar] [CrossRef]
- Buck, B.; Tang, Y.; Heinrich, S.; Deen, N.G.; Kuipers, J.A.M. Collision dynamics of wet solids: Rebound and rotation. Powder Technol. 2017, 316, 218–224. [Google Scholar] [CrossRef]
- Fang, W.; Wang, X.; Han, D.; Chen, X. Review of material parameter calibration method. Agriculture 2022, 12, 706. [Google Scholar] [CrossRef]
- Fu, J.; Zhang, J.; Liu, F. Enhanced sieving mechanism of novel cleaning screen and investigation of particle movement characteristics on the screen. Powder Technol. 2024, 431, 119043. [Google Scholar] [CrossRef]
- Wang, L.; Liu, T.; Feng, X.; Gao, Y.; Wang, B.; Zhang, S. Research progress of the restitution coefficients of collision of particles in agricultural and food fields. Trans. Chin. Soc. Agric. Eng. 2021, 37, 313–322. [Google Scholar]
- Stronge, W.J. Rigid body collisions with friction. Proceedings of the Royal Society of London. Ser. A Math. Phys. Sci. 1990, 431, 169–181. [Google Scholar]
- Jiang, Z.; Du, J.; Rieck, C.; Bück, A.; Tsotsas, E. PTV experiments and DEM simulations of the coefficient of restitution for irregular particles impacting on horizontal substrates. Powder Technol. 2020, 360, 352–365. [Google Scholar] [CrossRef]
- Wang, L.; Wu, B.; Wu, Z.; Li, R.; Feng, X. Experimental determination of the coefficient of restitution of particle-particle collision for frozen maize grains. Powder Technol. 2018, 338, 263–273. [Google Scholar] [CrossRef]
- Horabik, J.; Molenda, M. Parameters and contact models for DEM simulations of agricultural granular materials: A review. Biosyst. Eng. 2016, 147, 206–225. [Google Scholar] [CrossRef]
- Yardeny, I.; Portnikov, D.; Kalman, H. Experimental investigation of the coefficient of restitution of particles colliding with surfaces in air and water. Adv. Powder Technol. 2020, 31, 3747–3759. [Google Scholar] [CrossRef]
- Shi, L.; Zhao, W.; Sun, B.; Sun, W.; Zhou, G. Determination and analysis of basic physical and contact mechanics parameters of quinoa seeds by DEM. Int. J. Agric. Biol. Eng. 2023, 16, 35–43. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, H.R.; Chi, S.Z.; Tao, J.Y.; Lin, Z. Experimental study of particle collision and rebound with moving walls. Powder Technol. 2024, 433, 119157. [Google Scholar] [CrossRef]
- Tomar, V.; Bose, M. Anomalies in normal and oblique collision properties of spherical particles. Powder Technol. 2018, 325, 669–677. [Google Scholar] [CrossRef]
- Hlosta, J.; Žurovec, D.; Rozbroj, J.; Ramírez-Gómez, Á.; Nečas, J.; Zegzulka, J. Experimental determination of particle–particle restitution coefficient via double pendulum method. Chem. Eng. Res. Des. 2018, 135, 222–233. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Yu, Y.; Wang, Y. A modelling and verification approach for soybean seed particles using the discrete element method. Adv. Powder Technol. 2018, 29, 3274–3290. [Google Scholar] [CrossRef]
- Zhang, L.; Zhai, Y.; Chen, J.; Zhang, Z.; Huang, S. Optimization design and performance study of a subsoiler underlying the tea garden subsoiling mechanism based on bionics and EDEM. Soil Tillage Res. 2022, 220, 105375. [Google Scholar] [CrossRef]
- Xu, T.; Fu, H.; Liu, M.; Feng, W.; Zhang, R.; Wang, Y.; Wang, J. Ellipsoidal seed modeling and simulation parameter selection based on the discrete element method. Mater. Today Commun. 2023, 37, 106923. [Google Scholar] [CrossRef]
- Han, Y.; Jia, F.; Zeng, Y.; Jiang, L.; Zhang, Y.; Cao, B. Effects of rotation speed and outlet opening on particle flow in a vertical rice mill. Powder Technol. 2016, 297, 153–164. [Google Scholar] [CrossRef]
- Lu, Z.; Negi, S.C.; Jofriet, J.C. A numerical model for flow of granular materials in silos. Part 1: Model development. J. Agric. Eng. Res. 1997, 68, 223–229. [Google Scholar] [CrossRef]
- Vu-Quoc, L.; Zhang, X.; Walton, O.R. A 3-D discrete-element method for dry granular flows of ellipsoidal particles. Comput. Methods Appl. Mech. Eng. 2000, 187, 483–528. [Google Scholar] [CrossRef]
- Yan, D.; Yu, J.; Wang, Y.; Zhou, L.; Yu, Y. A general modelling method for soybean seeds based on the discrete element method. Powder Technol. 2020, 372, 212–226. [Google Scholar] [CrossRef]
- Yu, Z.; Hu, Z.; Peng, B.; Gu, F.; Yang, L.; Yang, M. Experimental determination of restitution coefficient of garlic bulb based on high-speed photography. Int. J. Agric. Biol. Eng. 2021, 14, 81–90. [Google Scholar] [CrossRef]
- Horabik, J.; Beczek, M.; Mazur, R.; Parafiniuk, P.; Ryżak, M.; Molenda, M. Determination of the restitution coefficient of seeds and coefficients of visco-elastic Hertz contact models for DEM simulations. Biosyst. Eng. 2017, 161, 106–119. [Google Scholar] [CrossRef]
- Yao, S.; An, S.; Bai, Z.; Chen, S.; Kan, Z.; Meng, H.; Yaping, L. Empirical investigation of parameter impacts on the three-dimensional coefficient of restitution of jujube at the time of harvest. Postharvest Biol. Technol. 2024, 212, 112859. [Google Scholar] [CrossRef]
- Yang, Y.; Hou, J.M.; Bai, J.B.; Yao, E.C.; He, T.; Li, J.P. Determination and analysis of typical castor seed collision restitution coefficient. J. China Agric. Univ. 2019, 24, 138–148. [Google Scholar]
- Huang, X.; Zha, X.; Pan, H.; Zong, W.; Chen, H. Measurement and analysis of rapeseeds’ restitution coefficient in point-to-plate collision model. Trans. Chin. Soc. Agric. Eng. 2014, 30, 22–29. [Google Scholar]
- Ma, Z.; Zhang, Z.; Zhang, Z.; Song, Z.; Liu, Y.; Li, Y.; Xu, L. Durable testing and analysis of a cleaning sieve based on vibration and strain signals. Agriculture 2023, 12, 2232. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Features | Application Scenario |
|---|---|---|
| The flat plate method | The experimental platform has a simple structure and is easy to operate. It can measure the height of the positions before and after the rebound to calculate the incident and reflection velocities and determine the coefficient of restitution (COR) between the material and the wall. | Cao et al. [12] used this method to measure the coefficient of restitution (COR) between rapeseeds and aluminum alloy, acrylic, and high-density polyethylene, providing a basis for selecting DEM simulation parameters. |
| The string suspension method | Two lightweight, thin strings, such as fishing lines, are used to connect the two test objects separately. The strings are pulled up to a certain angle and then released, causing the test objects to collide head-on. By recording the rebound angle and height after the collision, the coefficient of restitution (COR) can be determined. | Du et al. [13] used this device to measure the coefficient of restitution (COR) between chili peppers and steel plates, rubber plates, and between chili peppers themselves. |
| The mirror-single camera method | The mirror and background board are arranged at a certain angle. Using the principle of specular reflection, the three-dimensional motion trajectory of the colliding objects can be captured within the same camera view. This allows for the accurate determination of parameters such as velocity and the coefficient of restitution (COR). | Wu et al. [14] used this device to study the effects of ripening time, collision velocity, and fruit collision posture on the coefficient of restitution (COR). |
| The dual-camera method | Two high-speed cameras are used and arranged perpendicular to each other to accurately record the motion trajectory of the objects. This method provides the most accurate recording, but it requires higher standards for the experimental equipment and environment. | Zhang et al. [15] used this device to study the effects of collision material, moisture content, length, diameter, release height, and collision angle on the coefficient of restitution (COR) of cotton stalks. They also established a regression model between the influencing factors and the COR. |
| Group | Length Range (mm) | Width Range (mm) | Thickness Range (mm) |
|---|---|---|---|
| 1 | 7.16–9.41 | 7.37–8.42 | 6.31–7.24 |
| 2 | 7.03–9.76 | 7.26–8.65 | 6.23–7.35 |
| 3 | 6.84–9.62 | 7.17–8.38 | 6.17–7.50 |
| Average | 8.57 | 7.73 | 6.61 |
| Types of Materials | Poisson’s Ratio | Density (kg·m−3) | Shear Modulus (Pa) | Coefficient of Restitution | Static Friction | Rolling Friction |
|---|---|---|---|---|---|---|
| Soybean | 0.4 | 1261 | 7.6 × 108 | 0.54 | 0.2 | 0.02 |
| Stainless steel plate | 0.3 | 7850 | 7.9 × 1011 | 0.647 | 0.259 | 0.02 |
| Polyurethane plate | 0.49 | 1300 | 1.5 × 109 | 0.39 | 0.5 | 0.1 |
| Serial Number | Drop Height (mm) | Wall Inclination Angle (°) | Wall Speed (m/s) | Wall Material | Blank | COR |
|---|---|---|---|---|---|---|
| 1 | 450 | 9 | 0.7 | 1 | 2 | 0.6450 |
| 2 | 450 | 10 | 0.9 | 2 | 1 | 0.4782 |
| 3 | 450 | 11 | 1 | 1 | 2 | 0.6739 |
| 4 | 450 | 12 | 0.8 | 2 | 1 | 0.5512 |
| 5 | 500 | 9 | 0.8 | 1 | 1 | 0.6356 |
| 6 | 500 | 10 | 1 | 2 | 2 | 0.4815 |
| 7 | 500 | 11 | 0.9 | 1 | 1 | 0.6649 |
| 8 | 500 | 12 | 0.7 | 2 | 2 | 0.5421 |
| 9 | 550 | 9 | 0.9 | 2 | 1 | 0.4157 |
| 10 | 550 | 10 | 0.7 | 1 | 2 | 0.6423 |
| 11 | 550 | 11 | 0.8 | 2 | 2 | 0.5269 |
| 12 | 550 | 12 | 1 | 1 | 1 | 0.7010 |
| 13 | 600 | 9 | 1 | 2 | 1 | 0.3278 |
| 14 | 600 | 10 | 0.8 | 1 | 1 | 0.6651 |
| 15 | 600 | 11 | 0.7 | 2 | 2 | 0.5327 |
| 16 | 600 | 12 | 0.9 | 1 | 2 | 0.6819 |
| k1 | 0.587075 | 0.506025 | 0.590525 | 0.6637125 | 0.554938 | |
| k2 | 0.581025 | 0.566775 | 0.594700 | 0.4820125 | 0.590788 | |
| k3 | 0.571475 | 0.599600 | 0.560175 | |||
| k4 | 0.551875 | 0.619050 | 0.546050 | |||
| R | 0.0352 | 0.113025 | 0.04865 | 0.1817 | 0.03585 | |
| Order of Importance of Factors | Wall Material > Wall Inclination Angle > Wall Speed > Drop Height | |||||
| Source of Variation | Sum of Squares | Degrees of Freedom | Mean Square | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Drop Height | 0.003 | 3 | 0.001 | 0.835 | 0.529 | |
| Wall Inclination Angle | 0.029 | 3 | 0.010 | 8.640 | 0.020 | * |
| Wall Speed | 0.007 | 3 | 0.002 | 1.961 | 0.238 | |
| Wall Material | 0.132 | 1 | 0.132 | 116.384 | 0.000 | ** |
| Error | 0.006 | 5 | 0.001 | |||
| Total | 5.427 | 16 | ||||
| Corrected Total | 0.177 | 15 | ||||
| R2 = 0.968 (Adjusted R2 = 0.904) | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Wang, S.; Chen, S.; Li, B.; Tang, Z.; Hu, Y. Impact of Structural Parameters on the Collision Characteristics and Coefficient of Restitution of Soybean Particles on Harvester’s Cleaning Screens. Agriculture 2024, 14, 1201. https://doi.org/10.3390/agriculture14071201
Guo X, Wang S, Chen S, Li B, Tang Z, Hu Y. Impact of Structural Parameters on the Collision Characteristics and Coefficient of Restitution of Soybean Particles on Harvester’s Cleaning Screens. Agriculture. 2024; 14(7):1201. https://doi.org/10.3390/agriculture14071201
Chicago/Turabian StyleGuo, Xiaohu, Shiguo Wang, Shuren Chen, Bin Li, Zhong Tang, and Yifan Hu. 2024. "Impact of Structural Parameters on the Collision Characteristics and Coefficient of Restitution of Soybean Particles on Harvester’s Cleaning Screens" Agriculture 14, no. 7: 1201. https://doi.org/10.3390/agriculture14071201
APA StyleGuo, X., Wang, S., Chen, S., Li, B., Tang, Z., & Hu, Y. (2024). Impact of Structural Parameters on the Collision Characteristics and Coefficient of Restitution of Soybean Particles on Harvester’s Cleaning Screens. Agriculture, 14(7), 1201. https://doi.org/10.3390/agriculture14071201