
Design and Experiment of Planting Mechanism of Automatic Transplanter for Densely Planted Vegetables

Abstract
:1. Introduction
2. Device Structure and Working Principle
2.1. Structure and Working Principle of Transplanter
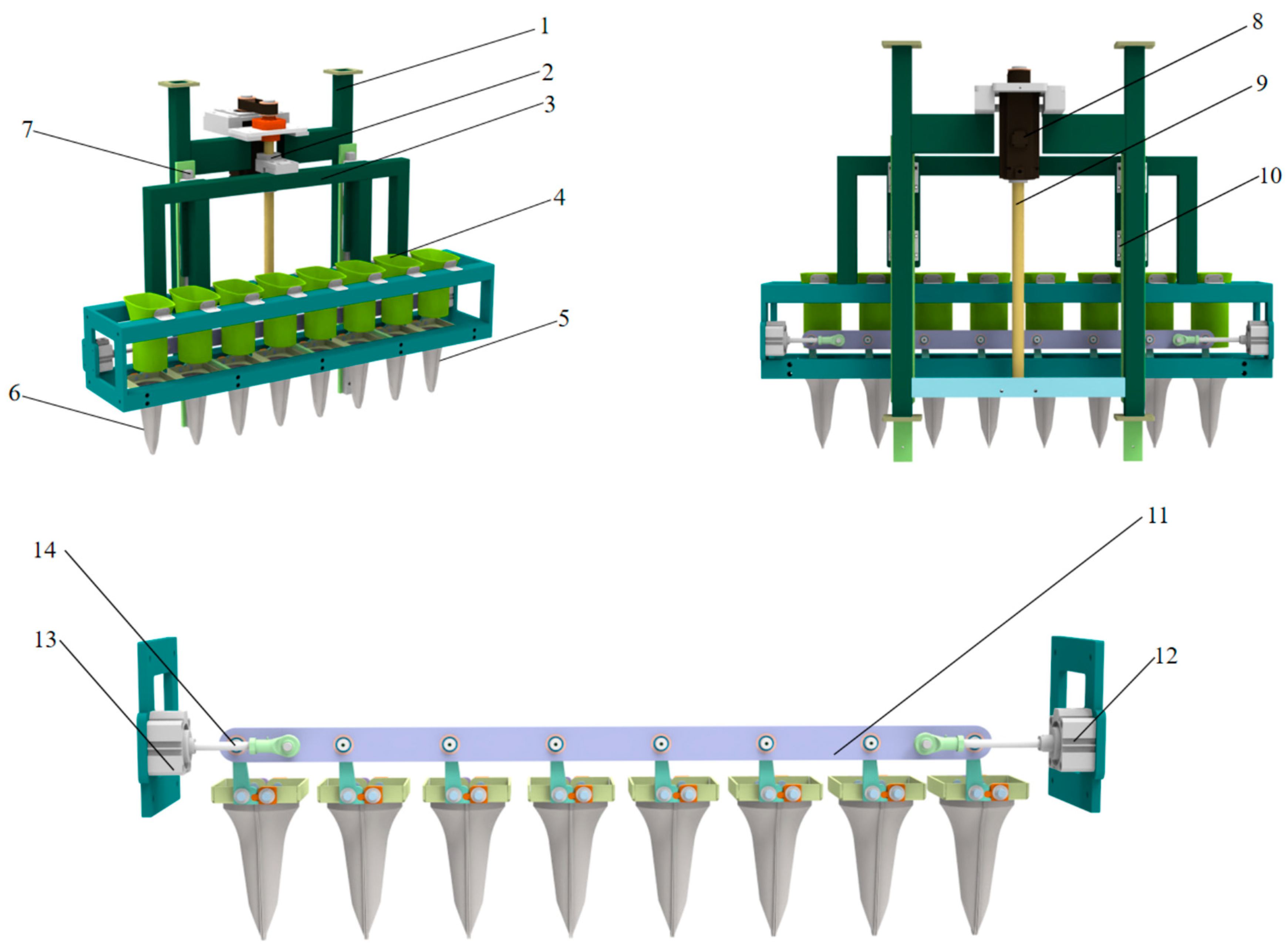
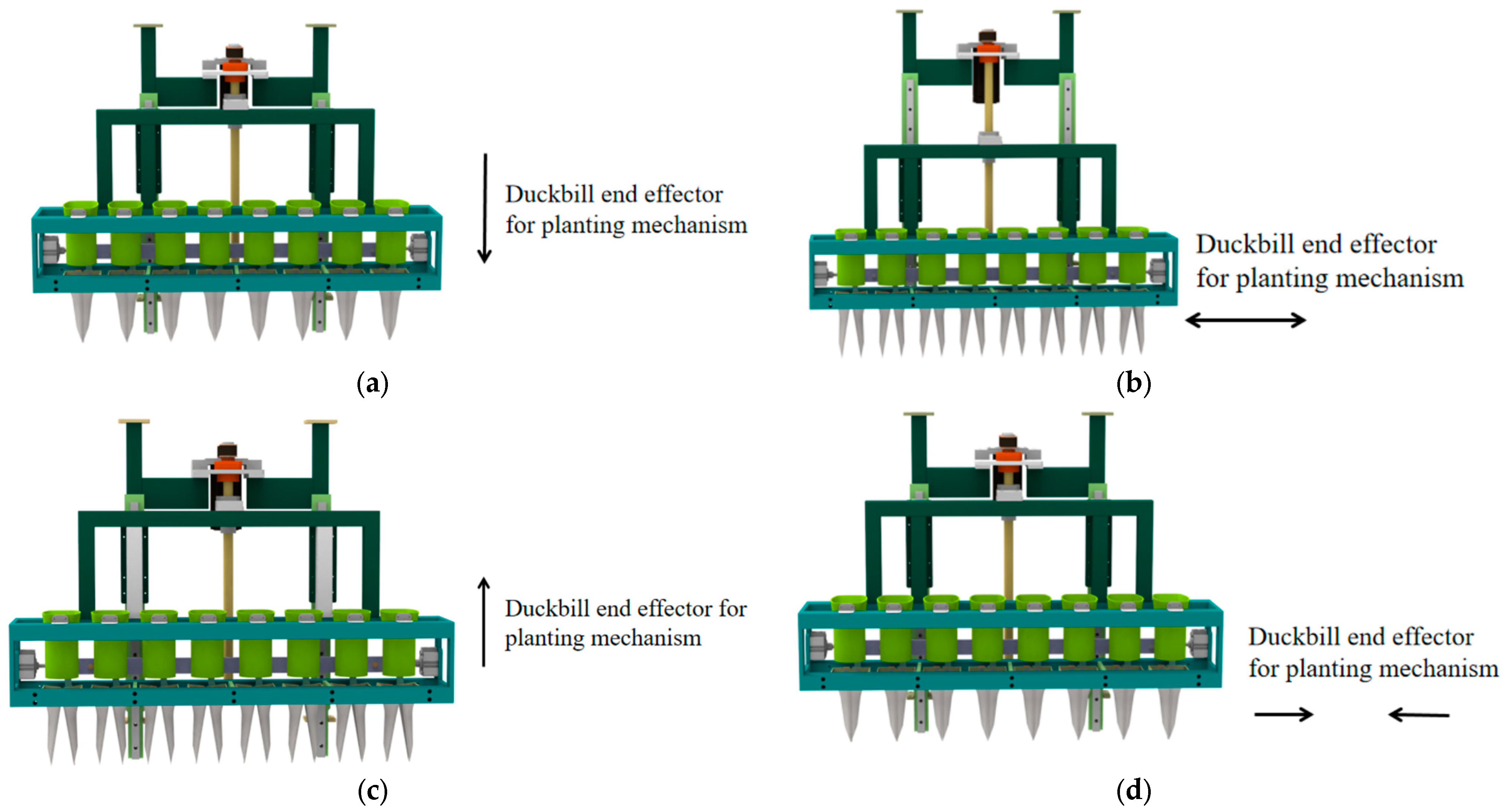
2.2. Structure and Working Principle of Planting Mechanism
3. Design of Key Components
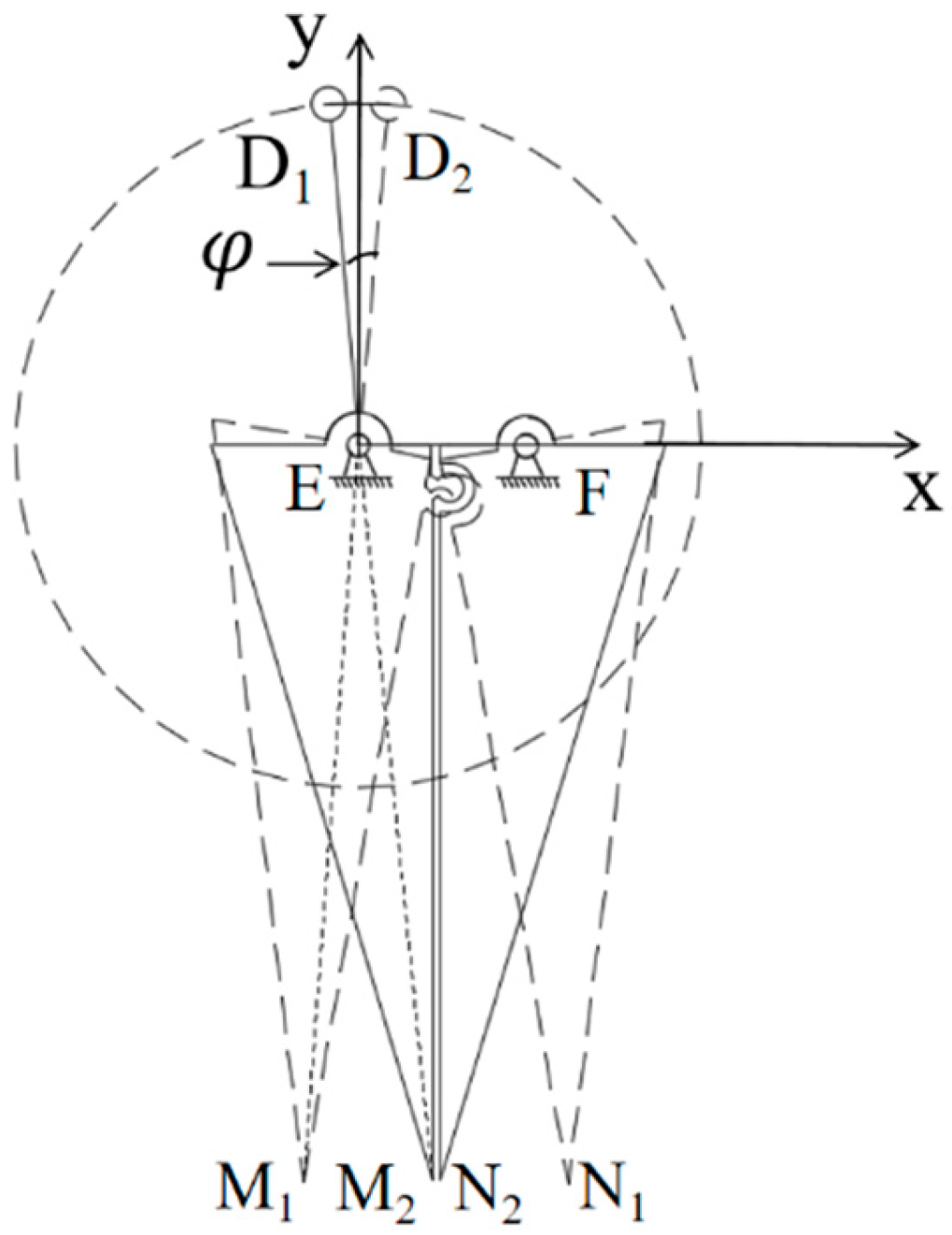
3.1. Establishment of Kinematic Model of Planting Mechanism
3.2. Design of Power Transmission Mechanism
3.2.1. Design of Motor and Screw
3.2.2. Design of Mechanical-Pneumatic Coupling Duckbill Opening and Closing Mechanism
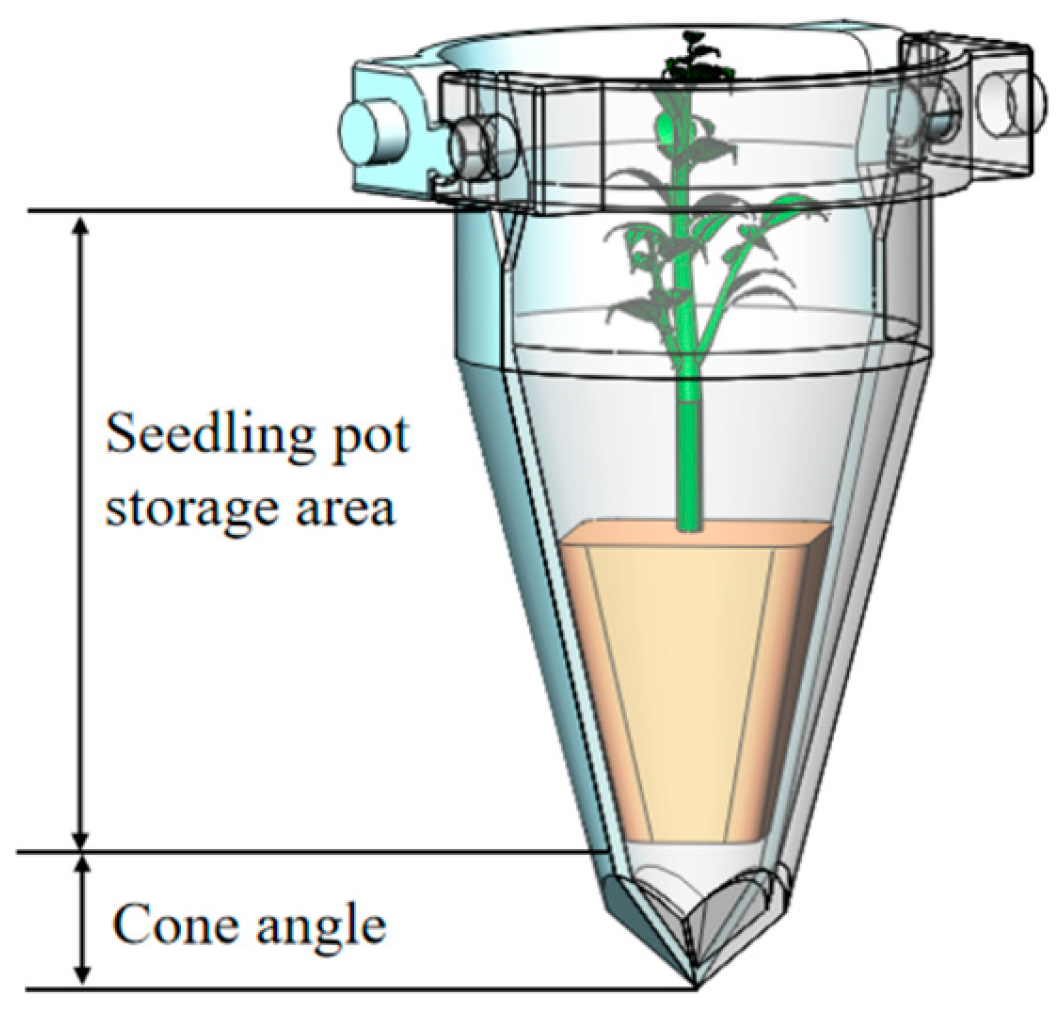
3.3. Structural Design of Duckbill Planting End Effector
3.3.1. Strength Analysis of Linkage Rod of Planting Mechanism
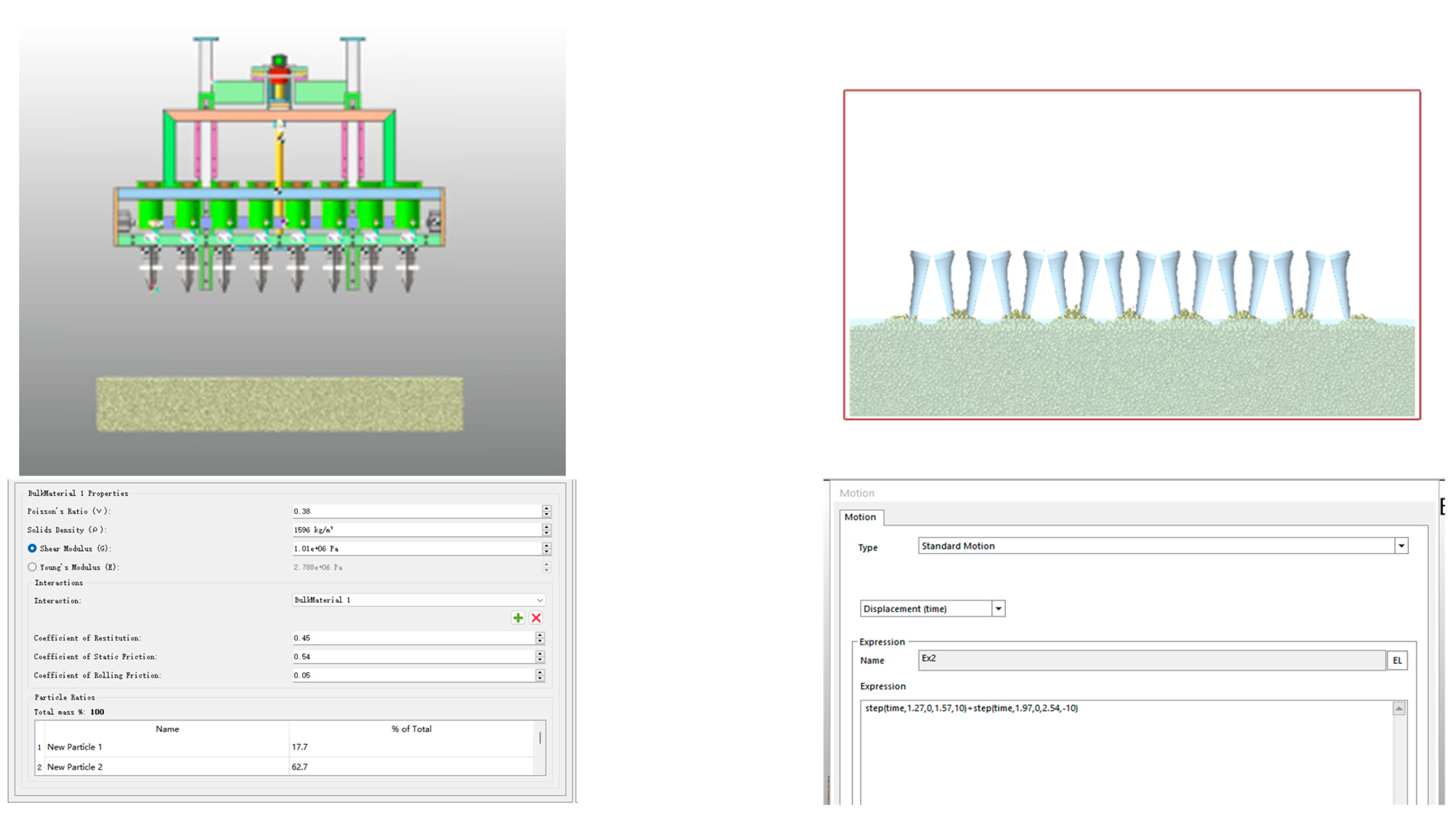
3.3.2. Coupling Simulation Test of Duckbill Planting End Effector
- (1)
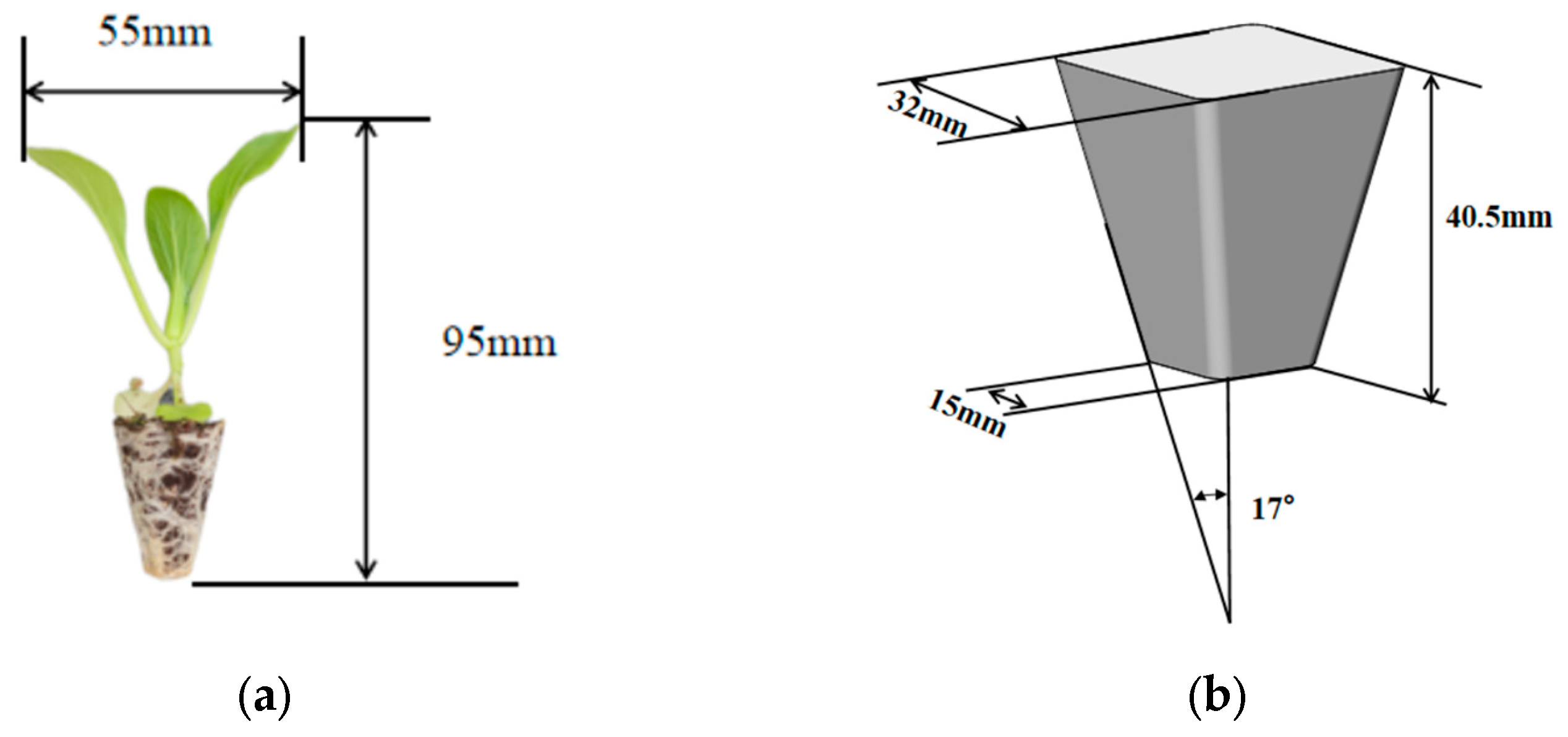
- Determination of test parameters
- (2)
- Test methods
- (3)
- Coupling simulation test based on EDEM 2022-RecurDyn 2024 software
- (4)
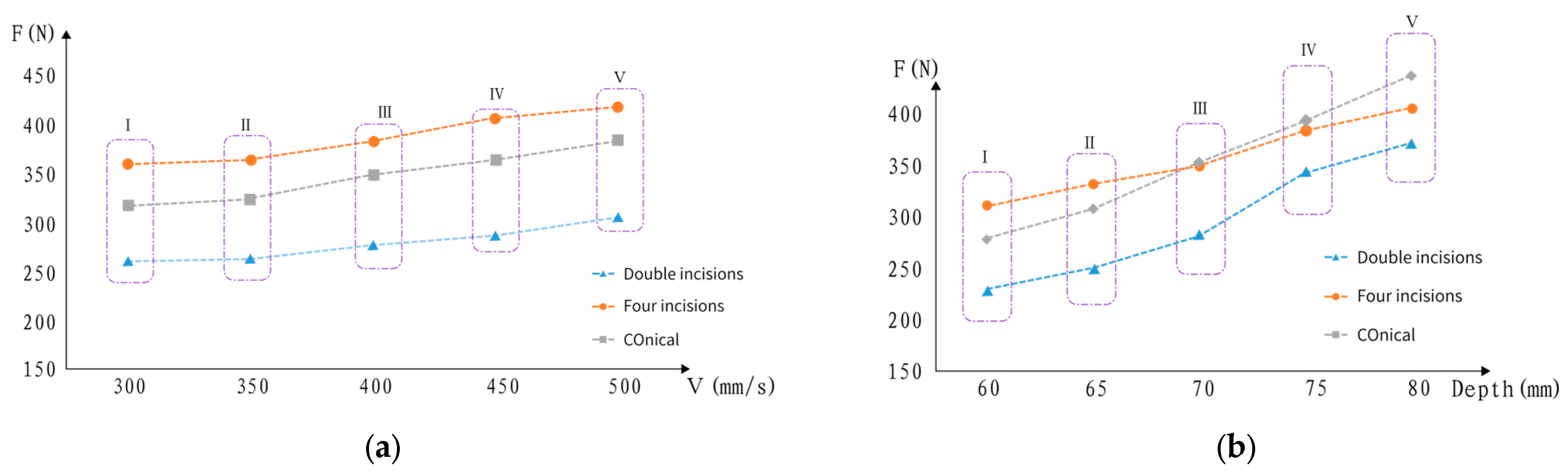
- Analysis of single-factor effect
- (5)
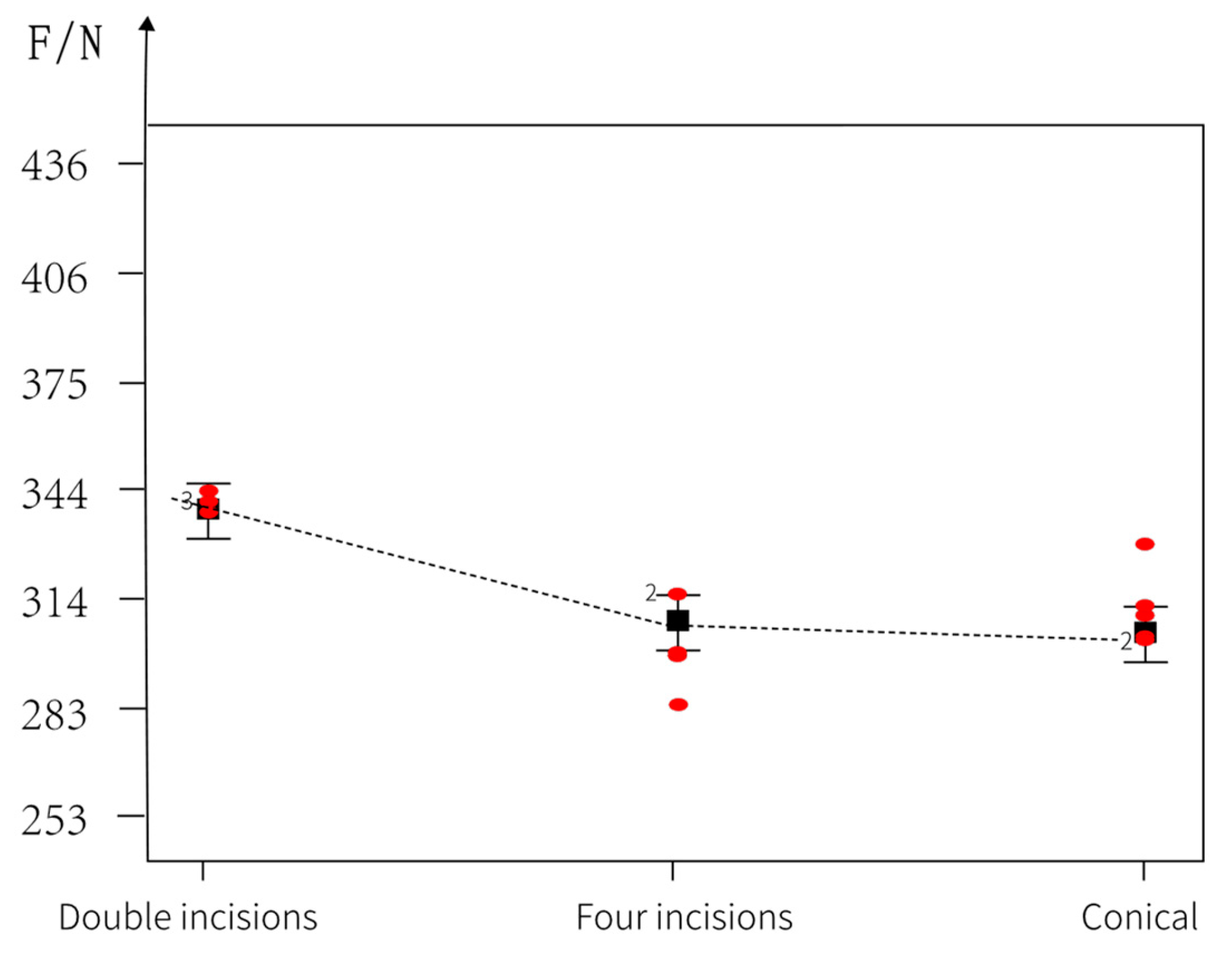
- Interactive Factor Response Surface Analysis
4. Resistance Verification Test of Duckbill Planting End Effector
4.1. Test Design
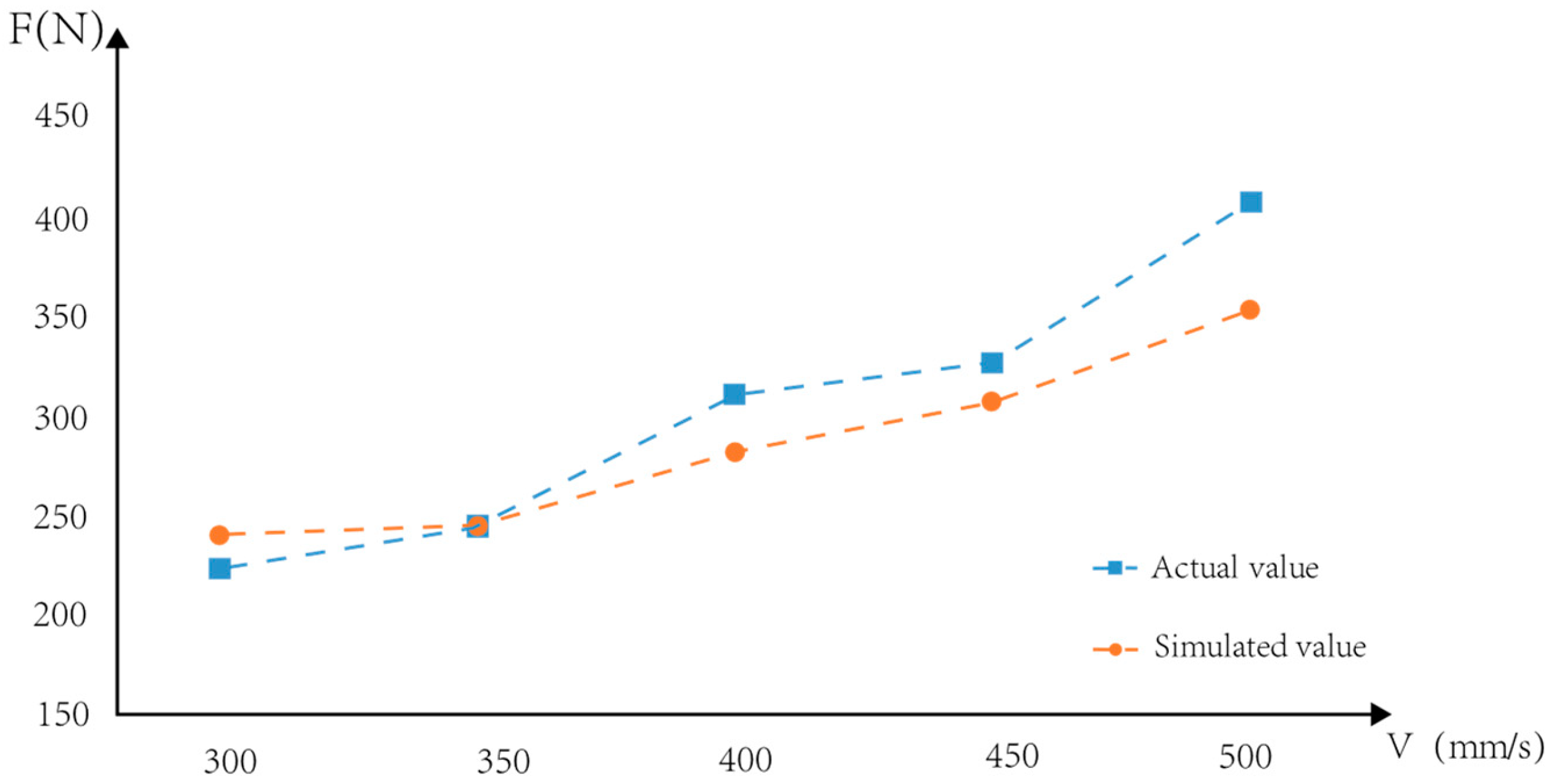
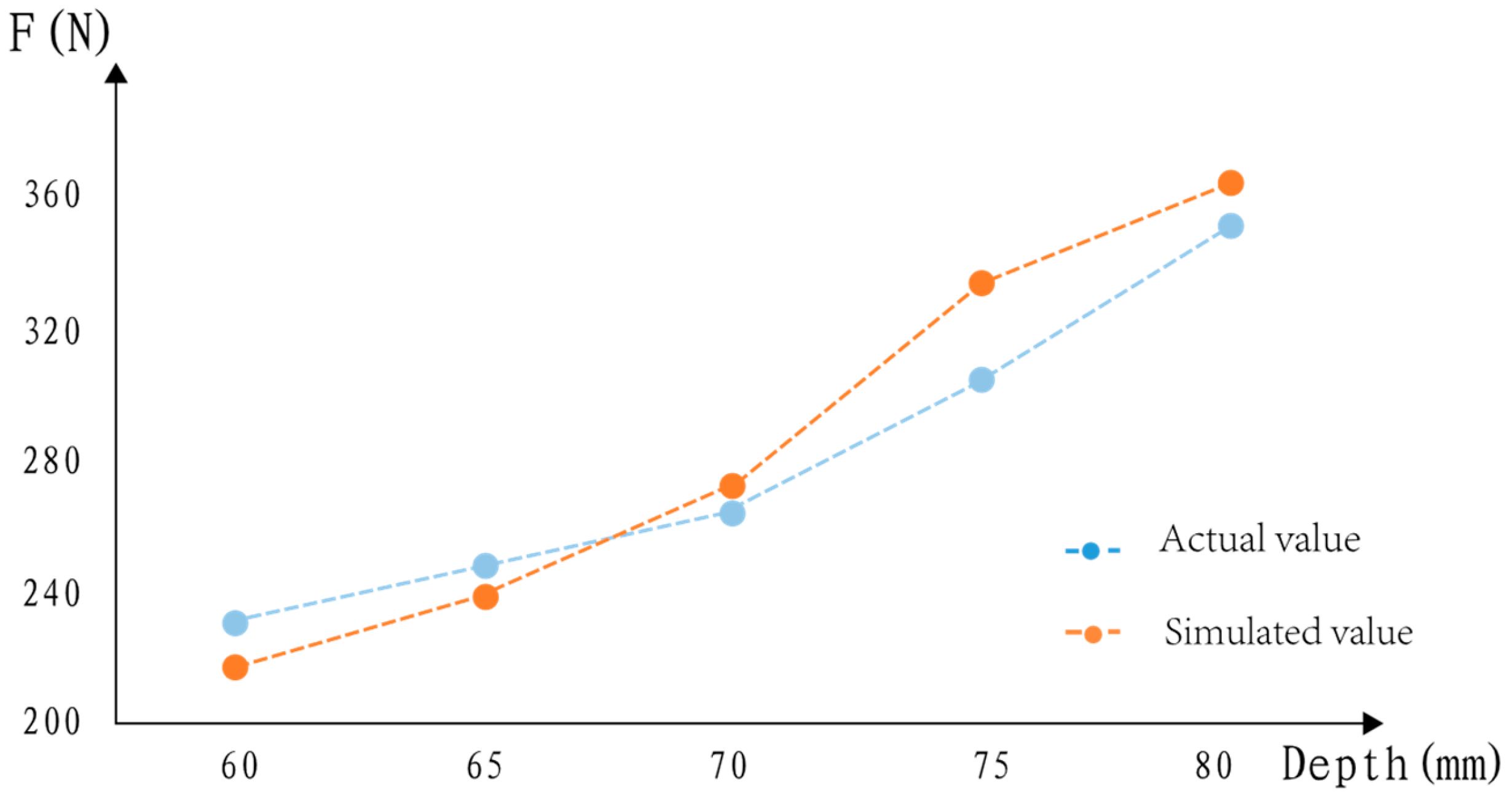
4.2. Analysis of Test Results
5. Planting Performance Test
5.1. Test Conditions
5.2. Test Design and Evaluation Index
- (1)
- Test Design
- (2)
- Evaluation Index
5.3. Test Results and Analysis
6. Conclusions
- (1)
- Based on the agronomic requirements of densely planted vegetables with multiple rows, small plant spacing, and small row spacing, an eight-row planting mechanism driven by a motor and a cylinder coupling was designed to overcome the problem of large plant spacing and row spacing in existing mechanized planting structures. The feasibility of the planting mechanism was verified by establishing a kinematic model.
- (2)
- The RecurDyn 2024-EDEM 2022 coupling simulation method was used to compare and analyze the planting resistance of three duckbill planting end effectors with different external structures based on the two experimental factors of planting speed and planting depth. The external structure with the smallest planting resistance was selected. Design-Expert software was used to analyze the results. Single-factor analysis and two-factor interactive analysis were performed. It was concluded that the duckbill planting end effector with a double-cut structure had the smallest planting resistance.
- (3)
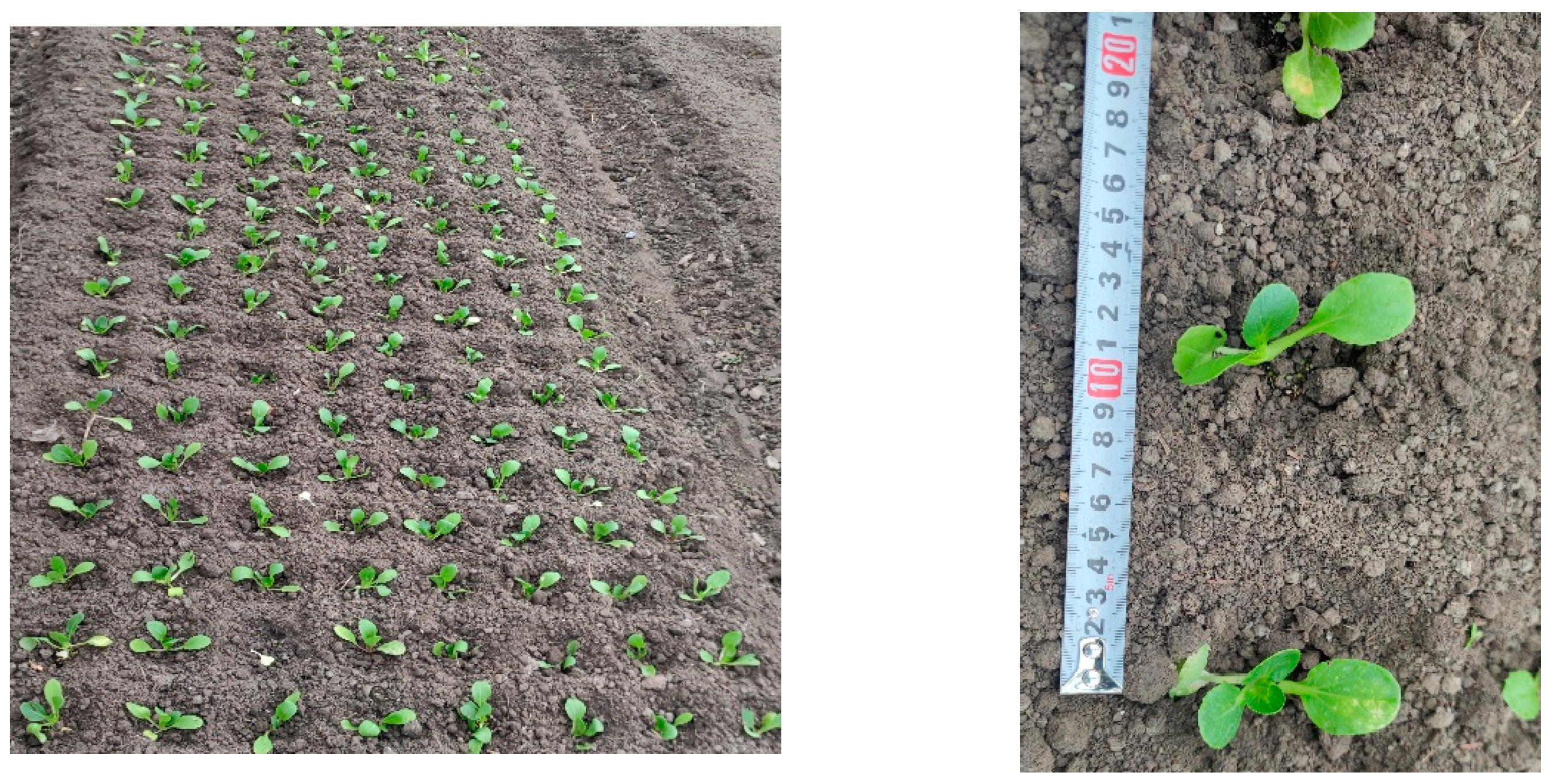
- The planting resistance verification system of the duckbill planting end effector was used to analyze the changes in planting resistance at different planting speeds and planting depths. The correctness of the simulation model was verified by comparing the actual planting resistance value with the simulation test value. A performance test of the planting mechanism was used to verify the coordination of the key components and the planting effect. The test results showed that the planting qualification rate of the prototype reached 96.62%, the various components had good coordination, and the planting spacing variation coefficient was only 3.55%. The planting efficiency reached about 7135 plants/h, which meets the agronomic requirements of dense vegetable transplanting.
- (4)
- Next, the kinematic model needs to be further refined and optimized, considering more variables in practical applications such as soil moisture, terrain changes, etc., to improve the adaptability and stability of the planting mechanism; developing an intelligent control system to automatically adjust the planting parameters will improve work efficiency and adaptability. This study solves the problem that existing planting mechanisms cannot meet the agronomic requirements of densely planted vegetables, reduces labor costs, improves production efficiency, and promotes the development of agricultural mechanization in the direction of efficiency, precision, and intelligence.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Periasamy, V.; Gounder, D.V.M.; Ramasamy, K. Factors influencing the performance of mechanical end effector during automatic transplanting of tomato seedlings. J. Appl. Nat. Sci. 2022, 14, 227–231. [Google Scholar] [CrossRef]
- Wu, G.; Wang, S.; Zhang, A.; Xiao, Y.; Li, L.; Yin, Y.; Li, H.; Wen, C.; Yan, B. Optimized design and experiment of a self-covering furrow opener for an automatic sweet potato seedling transplanting machine. Sustainability 2023, 15, 13091. [Google Scholar] [CrossRef]
- Sharma, A.; Khar, S. Design and development of a vegetable plug seedling transplanting mechanism for a semi-automatic transplanter. Sci. Hortic. 2024, 326, 112773. [Google Scholar] [CrossRef]
- Ji, D.; Liu, L.; Zeng, F.; Zhang, G.; Liu, Y.; Diao, H.; Tian, S.; Zhao, Z. Design and Experimental Study of a Traction Double-Row Automatic Transplanter for Solanum lycopersicum Seedlings. Horticulturae 2024, 10, 692. [Google Scholar] [CrossRef]
- Ji, D.; Tian, S.; Wu, H.; Zhao, B.; Gong, Y.; Ma, J.; Zhou, M.; Liu, W. Design and experimental verification of an automatic transplant device for a self-propelled flower transplanter. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 420. [Google Scholar] [CrossRef]
- Markumningsih, S.; Hwang, S.-J.; Kim, J.-H.; Jang, M.-K.; Nam, J.-S. Stress Simulation on Cam-Type Transplanting Device of Semiautomatic Vegetable Transplanter. Agriculture 2023, 13, 2230. [Google Scholar] [CrossRef]
- Miah, M.S.; Rahman, M.M.; Hoque, M.A.; Ibrahim, S.M.; Sultan, M.; Shamshiri, R.R.; Ucgul, M.; Hasan, M.; Barna, T.N. Design and evaluation of a power tiller vegetable seedling transplanter with dibbler and furrow type. Heliyon 2023, 9, e17827. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Tian, S.; Wang, Q.; Jiang, H. Key technologies of plug tray seedling transplanters in protected agriculture: A review. Agriculture 2023, 13, 1488. [Google Scholar] [CrossRef]
- Paudel, B.; Basak, J.K.; Jeon, S.W.; Lee, G.H.; Deb, N.C.; Karki, S.; Kim, H.T. Working speed optimisation of the fully automated vegetable seedling transplanter. J. Agric. Eng. 2024, 55, 1569. [Google Scholar] [CrossRef]
- Sharma, A.; Khar, S.; Chaudhary, D.; Thakur, P. Study of biometric attributes of plug type tomato seedlings pertinent to transplanter design. Indian J. Ecol. 2023, 50, 503–507. [Google Scholar]
- Habineza, E.; Ali, M.; Reza, M.N.; Woo, J.-K.; Chung, S.-O.; Hou, Y. Vegetable transplanters and kinematic analysis of major mechanisms: A review. Korean J. Agric. Sci. 2023, 50, 113–129. [Google Scholar] [CrossRef]
- Elwakeel, A.E.; Mazrou, Y.S.; Eissa, A.S.; Okasha, A.M.; Elmetwalli, A.H.; Makhlouf, A.H.; Metwally, K.A.; Mahmoud, W.A.; Elsayed, S. Design and Validation of a Variable-Rate Control Metering Mechanism and Smart Monitoring System for a High-Precision Sugarcane Transplanter. Agriculture 2023, 13, 2218. [Google Scholar] [CrossRef]
- Li, M.; Xiao, L.; Ma, X.; Yang, F.; Jin, X.; Ji, J. Vision-based a seedling selective planting control system for vegetable transplanter. Agriculture 2022, 12, 2064. [Google Scholar] [CrossRef]
- Stubbs, S.; Colton, J. The Design of a Mechanized Onion Transplanter for Bangladesh with Functional Testing. Agriculture 2022, 12, 1790. [Google Scholar] [CrossRef]
- Chen, K.; Yuan, Y.; Zhao, B.; Jin, X.; Lin, Y.; Zheng, Y. Finite element modal analysis and experiment of rice transplanter chassis. Int. J. Agric. Biol. Eng. 2022, 15, 91–100. [Google Scholar] [CrossRef]
- Paradkar, V.; Raheman, H.; Rahul, K. Development of a metering mechanism with serial robotic arm for handling paper pot seedlings in a vegetable transplanter. Artif. Intell. Agric. 2021, 5, 52–63. [Google Scholar] [CrossRef]
- Li, P.; Yun, Z.; Gao, K.; Si, L.; Du, X. Design and Test of a Force Feedback Seedling Pick-Up Gripper for an Automatic Transplanter. Agriculture 2022, 12, 1889. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, R.; Jia, C.; Li, Z.; Zhu, M.; Addy, M. Study of dynamic hole-forming performance of a cup-hanging planter on a high-speed seedling transplanter. Front. Mech. Eng. 2022, 8, 896881. [Google Scholar] [CrossRef]
- Zhang, M.; Jiang, Z.; Jiang, L.; Wu, C.; Yang, Y. Design and Test of the Seedling Cavitation and Lodging Monitoring System for the Rape Blanket Seedling Transplanter. Agriculture 2022, 12, 1397. [Google Scholar] [CrossRef]
- Khadatkar, A.; Mathur, S. Design and development of an automatic vegetable transplanter using a novel rotating finger device with push-type mechanism for plug seedlings. Int. J. Veg. Sci. 2022, 28, 121–131. [Google Scholar] [CrossRef]
- Yang, J.; Zhou, M.; Yin, D.; Yin, J. Design and Development of Rice Pot-Seedling Transplanting Machinery Based on a Non-Circular Gear Mechanism. Appl. Sci. 2024, 14, 1027. [Google Scholar] [CrossRef]
- Zhao, X.; Hou, Z.; Zhang, J.; Yu, H.; Hao, J.; Liu, Y. Study on the Hole-Forming Performance and Opening of Mulching Film for a Dibble-Type Transplanting Device. Agriculture 2024, 14, 494. [Google Scholar] [CrossRef]
- Haili, Z.; Wei, Y.; Gaohong, Y.; Bin, W.; Bingliang, Y. Optimization Design and Experiments of Ditching Multi-bar Seedling Planting Mechanism. Trans. Chin. Soc. Agric. Mach. 2023, 54, 79–86. [Google Scholar]
- Lei, W.; Liang, S.; Yadan, X.; Gaohong, Y.; Gervais, N.L.; Jiahui, H. Multi-pose Motion Synthesis of Three-arm Gear Train Planting Mechanism Based on Genetic Algorithm. Trans. Chin. Soc. Agric. Mach. 2022, 53, 70–77. [Google Scholar]
- Gaohong, Y.; Zhenpiao, L.; Lehui, X.; Peng, Z.; Chuanyu, W. Optimization design and test of large spacing planetary gear train for vegetable pot-seedling planting mechanism. Trans. Chin. Soc. Agric. Mach. 2015, 46, 38–44. [Google Scholar]
- Gaohong, Y.; Ye, J.; Shushu, C.; Bingliang, Y.; Jinbo, G.; Xiong, Z. Design and test of clipping-plug type transplanting mechanism of rice plug-seedling. Trans. Chin. Soc. Agric. Mach. 2019, 50, 100–108. [Google Scholar]
- Hu, S.; Hu, M.; Yan, W.; Zhang, W. Design and experiment of an integrated automatic transplanting mechanism for picking and planting pepper hole tray seedlings. Agriculture 2022, 12, 557. [Google Scholar] [CrossRef]
- Shi, L.; Zhao, W.; Sun, W. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2017, 33, 181–187. [Google Scholar]
- Daqing, Y.; Nuoyi, Z.; Maile, Z.; Yuchao, Y.; Size, Y.; Jinwu, W. Optimal Design and Experiment of High Speed Duckbill Planting Mechanism with Variable Catch-seedling Attitude. Trans. Chin. Soc. Agric. Mach. 2020, 51, 66–72. [Google Scholar]
- Ji, J.; Yang, L.; Jin, X.; Gao, S.; Pang, J.; Wang, J. Design and parameter optimization of planetary gear-train slip type pot seedling planting mechanism. Trans. CSAE 2018, 34, 83–92. [Google Scholar]
- Long, Z.; Bo, Y.; Xin, J. Structure Design of Duck Mouth Transplanting End Actuator Based on TRIZ Theory. Agric. Eng. 2020, 10, 76–80. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shape | Planting Speed (mm/s) | ||||
|---|---|---|---|---|---|
| Double incisions | 300 | 350 | 400 | 450 | 500 |
| Four incisions | 300 | 350 | 400 | 450 | 500 |
| Conical | 350 | 350 | 400 | 450 | 500 |
| Shape | Planting Depth (mm) | ||||
|---|---|---|---|---|---|
| Double incisions | 300 | 350 | 400 | 450 | 500 |
| Four incisions | 300 | 350 | 400 | 450 | 500 |
| Conical | 350 | 350 | 400 | 450 | 500 |
| Test Group | Shape | Planting Speed (mm/s) | ||||
|---|---|---|---|---|---|---|
| 1 | Double incisions | 300 | 350 | 400 | 450 | 500 |
| Planting resistance (N) | 259.5 | 261.4 | 275.9 | 285.7 | 303.6 | |
| 2 | Four incisions | 300 | 350 | 400 | 450 | 500 |
| Planting resistance (N) | 358.1 | 361.8 | 381.2 | 405.2 | 415.7 | |
| 3 | Conical | 300 | 350 | 400 | 450 | 500 |
| Planting resistance (N) | 315.7 | 321.8 | 348.5 | 360.8 | 381.6 | |
| Test Group | Shape | Planting Depth (mm) | ||||
|---|---|---|---|---|---|---|
| 1 | Double incisions | 60 | 65 | 70 | 75 | 80 |
| Planting resistance (N) | 225.3 | 246.8 | 278.9 | 339.3 | 368.4 | |
| 2 | Four incisions | 60 | 65 | 70 | 75 | 80 |
| Planting resistance (N) | 307.9 | 328.6 | 345.7 | 380.5 | 401.5 | |
| 3 | Conical | 60 | 65 | 70 | 75 | 80 |
| Planting resistance (N) | 275.4 | 304.7 | 348.8 | 389.5 | 433.7 | |
| Test Group | Depth (mm) | Speed (mm/s) | Shape | Resistance (N) |
|---|---|---|---|---|
| 1 | 60 | 400 | Double incisions | 229.5 |
| 2 | 60 | 500 | Double incisions | 268.3 |
| 3 | 70 | 400 | Double incisions | 302.8 |
| 4 | 60 | 300 | Conical | 275.6 |
| 5 | 60 | 400 | Four incisions | 320.5 |
| 6 | 70 | 400 | Double incisions | 303.5 |
| 7 | 70 | 400 | Four incisions | 356.8 |
| 8 | 70 | 400 | Double incisions | 309.5 |
| 9 | 70 | 400 | Conical | 342.5 |
| 10 | 70 | 400 | Four incisions | 325.6 |
| 11 | 80 | 400 | Double incisions | 416.5 |
| 12 | 70 | 400 | Conical | 339.8 |
| 13 | 80 | 500 | Conical | 469.8 |
| 14 | 70 | 300 | Double incisions | 290.6 |
| 15 | 60 | 500 | Four incisions | 344.3 |
| 16 | 70 | 300 | Four incisions | 319.8 |
| 17 | 70 | 400 | Double incisions | 312.5 |
| 18 | 60 | 300 | Four incisions | 308.6 |
| 19 | 80 | 500 | Double incisions | 453.8 |
| 20 | 80 | 400 | Conical | 353.6 |
| 21 | 80 | 500 | Four incisions | 423.3 |
| 22 | 60 | 500 | Conical | 338.6 |
| 23 | 70 | 500 | Four incisions | 379.8 |
| 24 | 60 | 400 | Conical | 298.6 |
| 25 | 70 | 300 | Conical | 320.4 |
| 26 | 80 | 300 | Four incisions | 424.1 |
| 27 | 70 | 500 | Double incisions | 318.6 |
| 28 | 80 | 400 | Four incisions | 454.1 |
| 29 | 70 | 400 | Conical | 341.8 |
| 30 | 70 | 400 | Four incisions | 340.4 |
| 31 | 70 | 500 | Conical | 382.7 |
| 32 | 70 | 400 | Double incisions | 330.5 |
| 33 | 70 | 400 | Four incisions | 356.8 |
| 34 | 60 | 300 | Double incisions | 205.6 |
| 35 | 70 | 400 | Conical | 345.6 |
| 36 | 70 | 400 | Four incisions | 338.7 |
| 37 | 70 | 400 | Conical | 342.6 |
| 38 | 80 | 300 | Conical | 421.3 |
| 39 | 80 | 300 | Double incisions | 376.8 |
| Parameter | Sum of Squares | Degrees of Freedom | Mean Square | F | p | |
|---|---|---|---|---|---|---|
| Model | 1.19 × 105 | 17 | 6984.75 | 21.93 | <0.0001 | significant |
| A-Depth | 80,423.22 | 1 | 80,423.22 | 252.46 | <0.0001 | |
| B-Velocity | 10,582.7 | 1 | 10,582.7 | 33.22 | <0.0001 | |
| C-shape | 14,145.9 | 2 | 7072.95 | 22.2 | <0.0001 | |
| AB | 112.12 | 1 | 112.12 | 0.35 | 0.5593 | |
| AC | 5052.37 | 2 | 2526.18 | 7.93 | 0.0027 | |
| BC | 642.23 | 2 | 321.12 | 1.01 | 0.3819 | |
| A2 | 2718.67 | 1 | 2718.67 | 8.53 | 0.0082 | |
| B2 | 537.02 | 1 | 537.02 | 1.69 | 0.2082 | |
| ABC | 324.26 | 2 | 162.13 | 0.51 | 0.6084 | |
| A2C | 1367.6 | 2 | 683.8 | 2.15 | 0.1418 | |
| B2C | 1807.85 | 2 | 903.93 | 2.84 | 0.0811 | |
| Residual | 6689.83 | 21 | 318.56 | |||
| Lost fitting term | 5460.42 | 9 | 606.71 | 5.92 | 0.0029 | significant |
| Pure deviation | 1229.4 | 12 | 102.45 | |||
| Sum | 1.25 × 105 | 38 |
| Test Group | Planting Speed (mm/s) | |||||
|---|---|---|---|---|---|---|
| 300 | 350 | 400 | 450 | 500 | ||
| Resistance (N) | 1 | 265.9 | 265.8 | 286.7 | 301.6 | 318.9 |
| 2 | 272.2 | 263.9 | 283.6 | 286.9 | 320.8 | |
| 3 | 270.9 | 253.6 | 290.8 | 291.6 | 334.8 | |
| Average value | 259.5 | 261.4 | 275.9 | 285.7 | 303.6 | |
| Test Group | Planting Depth (mm) | |||||
|---|---|---|---|---|---|---|
| 60 | 65 | 70 | 75 | 80 | ||
| Resistance (N) | 1 | 238.6 | 253.1 | 272.4 | 308.9 | 356.8 |
| 2 | 240.8 | 258.9 | 269.8 | 315.4 | 349.1 | |
| 3 | 236.1 | 253.4 | 271.8 | 305.6 | 360.2 | |
| Average value | 259.5 | 238.5 | 255.1 | 271.3 | 309.9 | |
| Planting Depth (mm) | Group | Number of Plantings (Plants) | Successful Plantings (Plants) | Missed Plantings (Plants) | Exposed Seedlings (Plants) | Lodging (Plants) | Replanting (Plants) | Planting Success Rate (%) | Average Planting Success Rate (%) |
|---|---|---|---|---|---|---|---|---|---|
| 60 mm | 1 | 640 | 621 | 5 | 6 | 5 | 3 | 97.03% | 96.09% |
| 2 | 640 | 615 | 6 | 9 | 3 | 7 | 96.09% | ||
| 3 | 640 | 609 | 9 | 5 | 10 | 7 | 95.15% | ||
| 70 mm | 4 | 640 | 628 | 3 | 4 | 2 | 3 | 98.13% | 96.81% |
| 5 | 640 | 614 | 8 | 10 | 5 | 3 | 95.90% | ||
| 6 | 640 | 617 | 3 | 8 | 7 | 5 | 96.41% | ||
| 80 mm | 7 | 640 | 619 | 6 | 7 | 3 | 3 | 96.72% | 96.97% |
| 8 | 640 | 627 | 2 | 4 | 3 | 4 | 97.97% | ||
| 9 | 640 | 610 | 7 | 6 | 8 | 9 | 95.31% |
| Planting Depth (mm) | Group | Number of Plantings (Plants) | Average Plant Spacing (mm) | Standard Deviation of Plant Spacing (mm) | Coefficient of Variation of Plant Spacing (%) |
|---|---|---|---|---|---|
| 60 mm | 1 | 640 | 101.4 | 3.42 | 3.46 |
| 2 | 640 | 102.4 | 4.68 | ||
| 3 | 640 | 96.4 | 2.35 | ||
| 70 mm | 4 | 640 | 102.5 | 4.21 | 3.61 |
| 5 | 640 | 97.3 | 4.11 | ||
| 6 | 640 | 96.1 | 2.40 | ||
| 80 mm | 7 | 640 | 98.4 | 3.53 | 3.59 |
| 8 | 640 | 102.1 | 4.01 | ||
| 9 | 640 | 100.9 | 3.27 |
| Group | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | Average |
|---|---|---|---|---|---|---|---|---|---|---|
| Time (s) | 321 | 346 | 332 | 314 | 308 | 332 | 310 | 328 | 315 | 322.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Hu, J.; Li, J.; Liu, W.; Yue, R.; Zhang, T.; Yao, M. Design and Experiment of Planting Mechanism of Automatic Transplanter for Densely Planted Vegetables. Agriculture 2024, 14, 1357. https://doi.org/10.3390/agriculture14081357
Shi J, Hu J, Li J, Liu W, Yue R, Zhang T, Yao M. Design and Experiment of Planting Mechanism of Automatic Transplanter for Densely Planted Vegetables. Agriculture. 2024; 14(8):1357. https://doi.org/10.3390/agriculture14081357
Chicago/Turabian StyleShi, Jiawei, Jianping Hu, Jing Li, Wei Liu, Rencai Yue, Tengfei Zhang, and Mengjiao Yao. 2024. "Design and Experiment of Planting Mechanism of Automatic Transplanter for Densely Planted Vegetables" Agriculture 14, no. 8: 1357. https://doi.org/10.3390/agriculture14081357