
Research Progress on Autonomous Operation Technology for Agricultural Equipment in Large Fields

 ,
,  ,
,
Abstract
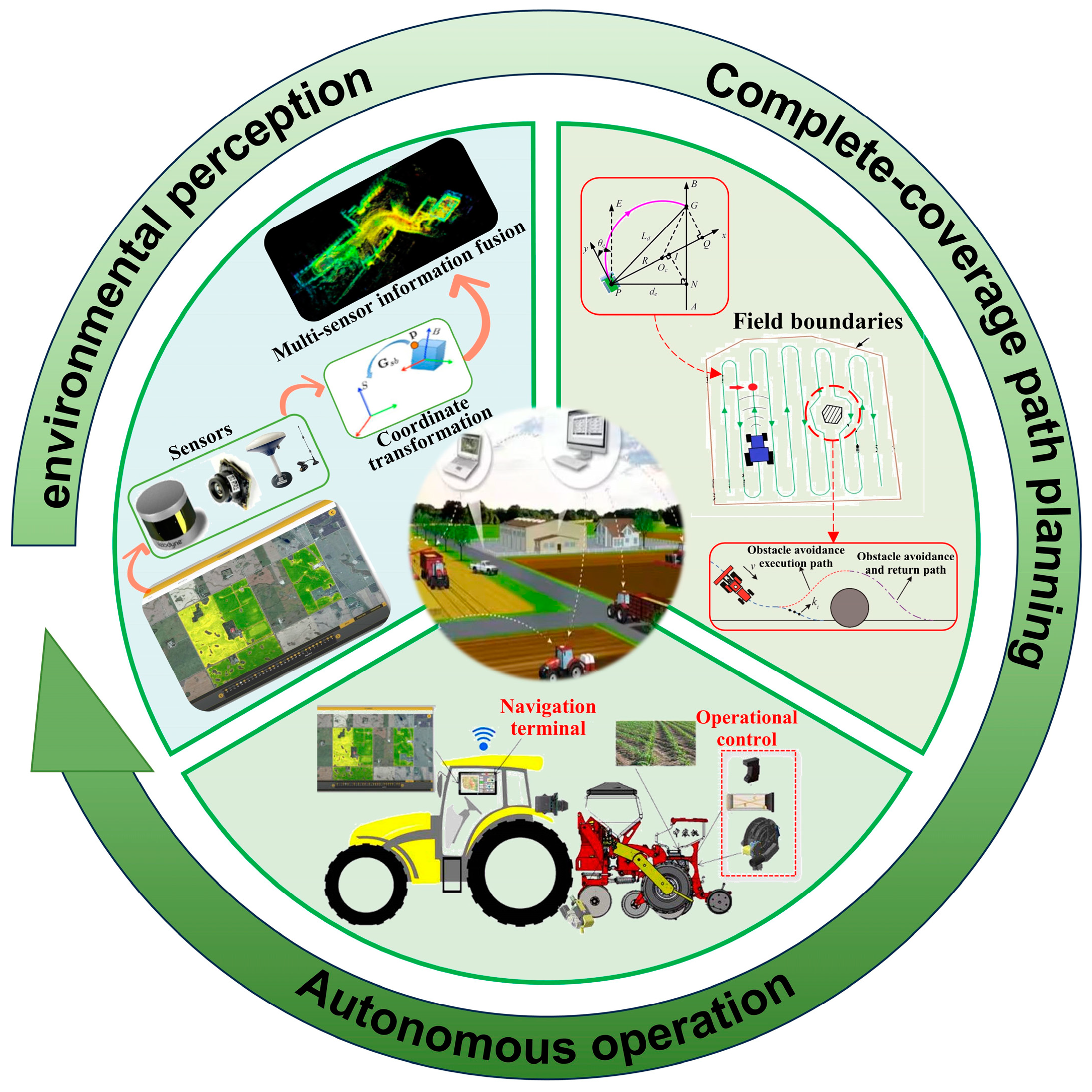
1. Introduction
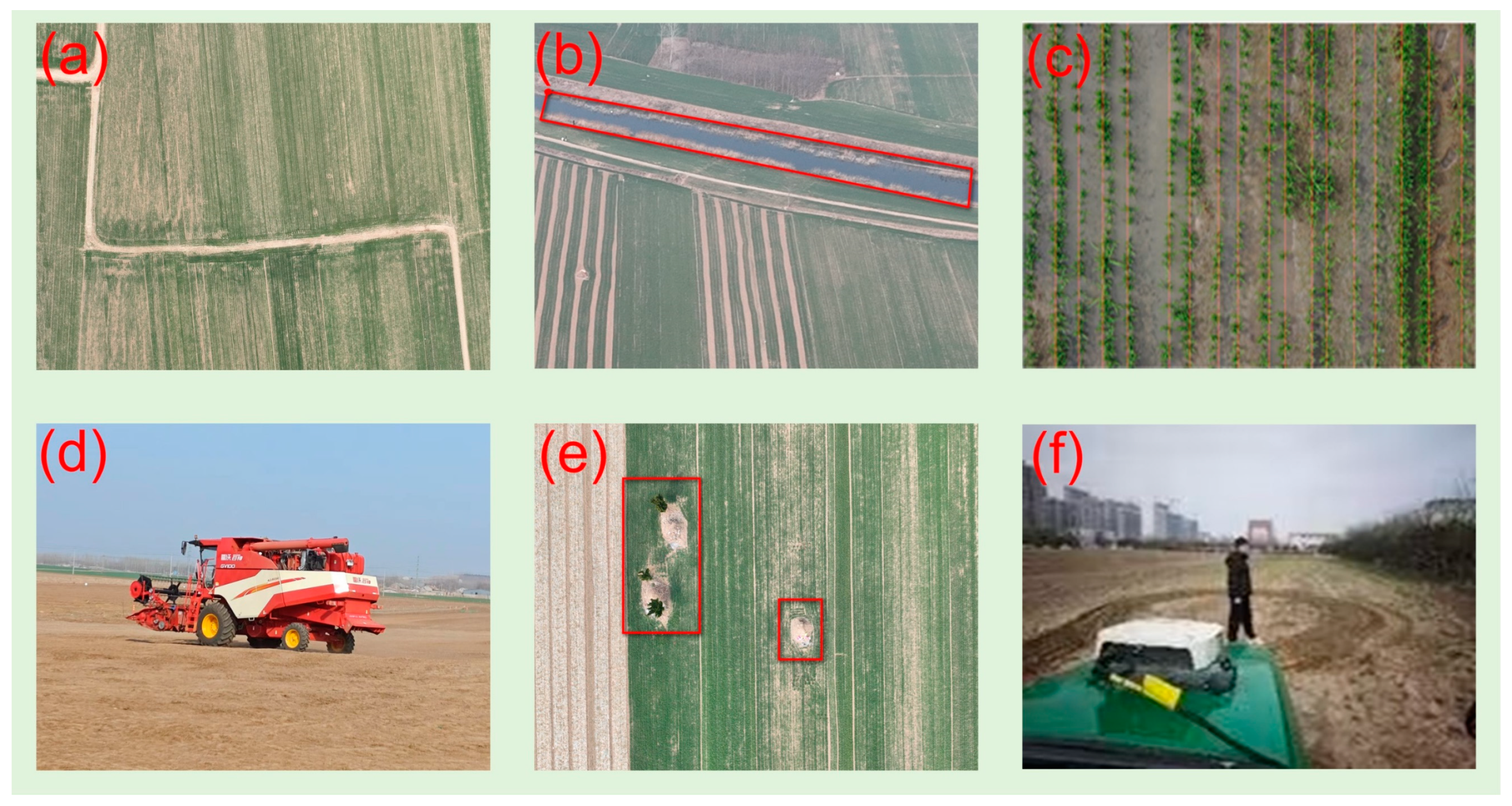
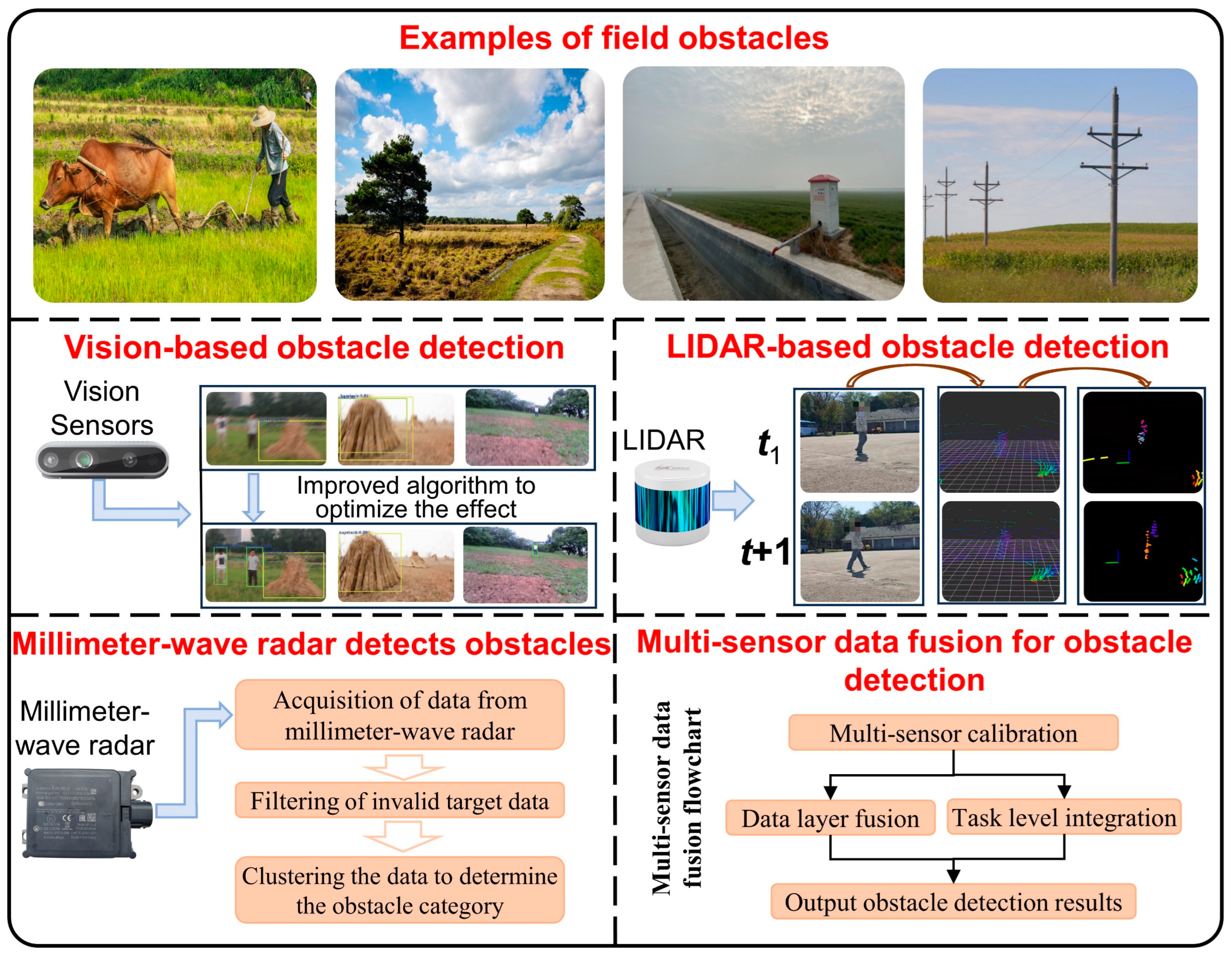
2. Onboard Environmental Sensing Technology
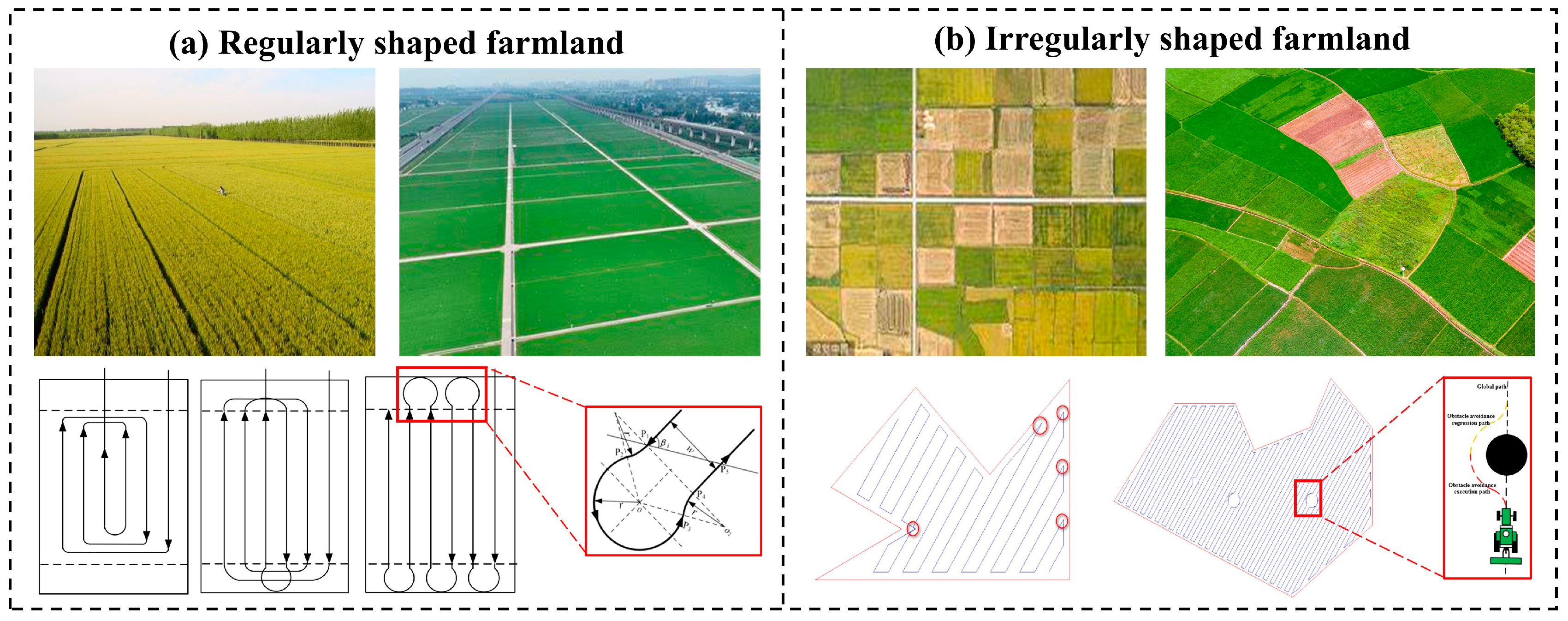
3. Complete-Coverage Path-Planning Technology
3.1. Classical Path-Planning Algorithm
3.2. Bionics-Based Path-Planning Algorithms
4. Autonomous Operation Control Technology
5. Conclusions and Prospection
5.1. Conclusions
5.2. Prospection
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Charania, I.; Li, X. Smart farming: Agriculture’s shift from a labor intensive to technology native industry. Internet Things 2020, 9, 100142. [Google Scholar] [CrossRef]
- Ren, C.; Zhou, X.; Wang, C.; Guo, Y.; Diao, Y.; Shen, S.; Reis, S.; Li, W.; Xu, J.; Gu, B. Ageing threatens sustainability of smallholder farming in China. Nature 2023, 616, 96–103. [Google Scholar] [CrossRef]
- Liu, J.; Fang, Y.; Wang, G.; Liu, B.; Wang, R. The aging of farmers and its challenges for labor-intensive agriculture in China: A perspective on farmland transfer plans for farmers’ retirement. J. Rural. Stud. 2023, 100, 103013. [Google Scholar] [CrossRef]
- Chen, R.; Xu, P.; Song, P.; Wang, M.; He, J. China has faster pace than Japan in population aging in next 25 years. Biosci. Trends 2019, 13, 287–291. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Zhang, J.; Zhang, K.; Xu, D.; Qi, Y.; Deng, X. The impacts of farmer ageing on farmland ecological restoration technology adoption: Empirical evidence from rural China. J. Clean. Prod. 2023, 430, 139648. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, H.; Chen, X.; Zhang, C.; Ma, W.; Huang, C.; Zhang, W.; Mi, G.; Miao, Y.; Li, X.; et al. Pursuing sustainable productivity with millions of smallholder farmers. Nature 2018, 555, 363–366. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Chu, Y.; Xue, Y.; Ying, H.; Chen, X.; Zhao, Y.; Ma, W.; Ma, L.; Zhang, J.; Yin, Y.; et al. Outlook of China’s agriculture transforming from smallholder operation to sustainable production. Glob. Food Secur. 2020, 26, 100444. [Google Scholar] [CrossRef]
- Yao, Z.; Zhao, C.; Zhang, T. Agricultural machinery automatic navigation technology. Iscience 2024, 27, 108714. [Google Scholar] [CrossRef] [PubMed]
- Shuai, L.; Li, Z.; Chen, Z.; Luo, D.; Mu, J. A research review on deep learning combined with hyperspectral Imaging in multiscale agricultural sensing. Comput. Electron. Agric. 2024, 217, 108577. [Google Scholar] [CrossRef]
- Ariza-Sentís, M.; Vélez, S.; Martínez-Peña, R.; Baja, H.; Valente, J. Object detection and tracking in Precision Farming: A systematic review. Comput. Electron. Agric. 2024, 219, 108757. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.; Xiong, K.; Tian, Y.; Du, Y.; Zhu, Z.; Du, M.; Zhai, Z. A review of vision-based crop row detection method: Focusing on field ground autonomous navigation operations. Comput. Electron. Agric. 2024, 222, 109086. [Google Scholar] [CrossRef]
- Liu, H.; Li, K.; Ma, L.; Meng, Z. Headland Identification and Ranging Method for Autonomous Agricultural Machines. Agriculture 2024, 14, 243. [Google Scholar] [CrossRef]
- Liang, C.; Pan, K.; Zhao, M.; Lu, M. Multi-Node Path Planning of Electric Tractor Based on Improved Whale Optimization Algorithm and Ant Colony Algorithm. Agriculture 2023, 13, 586. [Google Scholar] [CrossRef]
- Wan, H.; Ou, Y.; Guan, X.; Jiang, R.; Zhou, Z.; Luo, X. Review of the perception technologies for unmanned agricultural machinery operating environment. Trans. CSAE 2024, 40, 1–18. [Google Scholar] [CrossRef]
- Bai, Y.; Zhang, B.; Xu, N.; Zhou, J.; Shi, J.; Diao, Z. Vision-based navigation and guidance for agricultural autonomous vehicles and robots: A review. Comput. Electron. Agric. 2023, 205, 107584. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. Data Fusion in Agriculture: Resolving Ambiguities and Closing Data Gaps. Sensors 2022, 22, 2285. [Google Scholar] [CrossRef]
- Höffmann, M.; Patel, S.; Büskens, C. Optimal guidance track generation for precision agriculture: A review of coverage path planning techniques. J. Field Robot. 2024, 41, 823–844. [Google Scholar] [CrossRef]
- Sánchez-Ibáñez, J.R.; Pérez-del-Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef]
- Zhang, G.; Ji, C.; Wu, Q.; Liu, H.; Zhou, Y.; Fu, J. Study on path planning of mechanized harvesting of ratoon rice in the first season based on the capacitated arc routing problem model. Front. Plant Sci. 2022, 13, 963307. [Google Scholar] [CrossRef]
- Guan, Z.; Li, Y.; Mu, S.; Zhang, M.; Jiang, T.; Li, H.; Wang, G.; Wu, C. Tracing algorithm and control strategy for crawler rice combine harvester auxiliary navigation system. Biosyst. Eng. 2021, 211, 50–62. [Google Scholar] [CrossRef]
- An, G.; Zhong, Z.; Yang, S.; Yang, L.; Jin, C.; Du, J.; Yin, X. EASS: An automatic steering system for agricultural wheeled vehicles using fuzzy control. Comput. Electron. Agric. 2024, 217, 108544. [Google Scholar] [CrossRef]
- Zhao, X.; Lu, E.; Tang, Z.; Luo, C.; Xu, L.; Wang, H. Trajectory prediction method for agricultural tracked robots based on slip parameter estimation. Comput. Electron. Agric. 2024, 222, 109057. [Google Scholar] [CrossRef]
- Wang, Q.; Meng, Z.; Wen, C.; Qin, W.; Wang, F.; Zhang, A.; Zhao, C.; Yin, Y. Grain combine harvester header profiling control system development and testing. Comput. Electron. Agric. 2024, 223, 109082. [Google Scholar] [CrossRef]
- Cui, Z.; Hu, J.; Yu, Y.; Cao, G.; Zhang, H.; Chai, X.; Chen, H.; Xu, L. Automatic grain unloading method for track-driven rice combine harvesters based on stereo vision. Comput. Electron. Agric. 2024, 220, 108917. [Google Scholar] [CrossRef]
- Rovira-Mas, F.; Saiz-Rubio, V.; Cuenca-Cuenca, A. Augmented Perception for Agricultural Robots Navigation. IEEE Sens. J. 2021, 21, 11712–11727. [Google Scholar] [CrossRef]
- Xie, D.; Chen, L.; Liu, L.; Chen, L.; Wang, H. Actuators and Sensors for Application in Agricultural Robots: A Review. Machines 2022, 10, 913. [Google Scholar] [CrossRef]
- Lu, H.; Wang, H.; Ma, Z.; Ren, Y.; Fu, W.; Shan, Y.; Hu, S.; Zhang, G.; Meng, Z. Farmland boundary extraction based on the AttMobile-DeeplabV3+ network and least squares fitting of straight lines. Front. Plant Sci. 2023, 14, 1228590. [Google Scholar] [CrossRef]
- Hong, Q.; Zhu, Y.; Liu, W.; Ren, T.; Shi, C.; Lu, Z.; Yang, Y.; Deng, R.; Qian, J.; Tan, C. A segmentation network for farmland ridge based on encoder-decoder architecture in combined with strip pooling module and ASPP. Front. Plant Sci. 2024, 15, 1328075. [Google Scholar] [CrossRef]
- Yang, Y.; Shen, X.; An, D.; Han, H.; Tang, W.; Wang, Y.; Yang, Y.; Ma, Q.; Chen, L. Crop Row Detection Algorithm Based on 3-D LiDAR: Suitable for Crop Row Detection in Different Periods. IEEE Trans. Instrum. Meas. 2024, 73, 8503413. [Google Scholar] [CrossRef]
- Campos, Y.; Sossa, H.; Pajares, G. Spatio-temporal analysis for obstacle detection in agricultural videos. Appl. Soft Comput. 2016, 45, 86–97. [Google Scholar] [CrossRef]
- Pini, M.; Marucco, G.; Falco, G.; Nicola, M.; De Wilde, W. Experimental Testbed and Methodology for the Assessment of RTK GNSS Receivers Used in Precision Agriculture. IEEE Access 2020, 8, 14690–14703. [Google Scholar] [CrossRef]
- Jiménez-Martínez, M.J.; Farjas-Abadia, M.; Quesada-Olmo, N. An Approach to Improving GNSS Positioning Accuracy Using Several GNSS Devices. Remote Sens. 2021, 13, 1149. [Google Scholar] [CrossRef]
- Perez-Ruiz, M.; Martínez-Guanter, J.; Upadhyaya, S.K. Chapter 15—High-precision GNSS for agricultural operations. In GPS and GNSS Technology in Geosciences; Elsevier: Amsterdam, The Netherlands, 2021; pp. 299–335. [Google Scholar] [CrossRef]
- Chen, Y.; Li, G.; Zhang, X.; Jia, J.; Zhou, K.; Wu, C. Identifying field and road modes of agricultural Machinery based on GNSS Recordings: A graph convolutional neural network approach. Comput. Electron. Agric. 2022, 198, 107082. [Google Scholar] [CrossRef]
- Moeller, R.; Deemyad, T.; Sebastian, A. Autonomous Navigation of an Agricultural Robot Using RTK GPS and Pixhawk. In Proceedings of the 2020 Intermountain Engineering, Technology and Computing (IETC), Orem, UT, USA, 2–3 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ren, H.; Wu, J.; Lin, T.; Yao, Y.; Liu, C. Research on an Intelligent Agricultural Machinery Unmanned Driving System. Agriculture 2023, 13, 1907. [Google Scholar] [CrossRef]
- Huang, Y.; Fu, J.; Xu, S.; Han, T.; Liu, Y. Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture 2022, 12, 1169. [Google Scholar] [CrossRef]
- LeVoir, S.J.; Farley, P.A.; Sun, T.; Xu, C. High-Accuracy Adaptive Low-Cost Location Sensing Subsystems for Autonomous Rover in Precision Agriculture. IEEE Open J. Ind. Appl. 2020, 1, 74–94. [Google Scholar] [CrossRef]
- Liang, X.; Huang, Z.; Qin, H. Differential positioning based on the orthogonal transformation algorithm with GNSS multi-system. GPS Solut. 2018, 22, 89. [Google Scholar] [CrossRef]
- Yue, B.; Zhang, Z.; Zhang, W.; Luo, X.; Zhang, G.; Huang, H.; Wu, X.; Bao, K.; Peng, M. Design of an Automatic Navigation and Operation System for a Crawler-Based Orchard Sprayer Using GNSS Positioning. Agronomy 2024, 14, 271. [Google Scholar] [CrossRef]
- Kaivosoja, J.; Linkolehto, R. GNSS error simulator for farm machinery navigation development. Comput. Electron. Agric. 2015, 119, 166–177. [Google Scholar] [CrossRef]
- Lee, K.; Choi, H.; Kim, J. Development of Path Generation and Algorithm for Autonomous Combine Harvester Using Dual GPS Antenna. Sensors 2023, 23, 4944. [Google Scholar] [CrossRef]
- Vulpi, F.; Marani, R.; Petitti, A.; Reina, G.; Milella, A. An RGB-D multi-view perspective for autonomous agricultural robots. Comput. Electron. Agric. 2022, 202, 107419. [Google Scholar] [CrossRef]
- Galati, R.; Mantriota, G.; Reina, G. RoboNav: An Affordable Yet Highly Accurate Navigation System for Autonomous Agricultural Robots. Robotics 2022, 11, 99. [Google Scholar] [CrossRef]
- Valente, D.S.M.; Momin, A.; Grift, T.; Hansen, A. Accuracy and precision evaluation of two low-cost RTK global navigation satellite systems. Comput. Electron. Agric. 2020, 168, 105142. [Google Scholar] [CrossRef]
- Jing, Y.; Li, Q.; Ye, W.; Liu, G. Development of a GNSS/INS-based automatic navigation land levelling system. Comput. Electron. Agric. 2023, 213, 108187. [Google Scholar] [CrossRef]
- Li, S.; Zhang, M.; Ji, Y.; Zhang, Z.; Cao, R.; Chen, B.; Li, H.; Yin, Y. Agricultural machinery GNSS/IMU-integrated navigation based on fuzzy adaptive finite impulse response Kalman filtering algorithm. Comput. Electron. Agric. 2021, 191, 106524. [Google Scholar] [CrossRef]
- Hong, Z.; Li, Y.; Lin, H.; Gong, L.; Liu, C. Field Boundary Distance Detection Method in Early Stage of Planting Based on Binocular Vision. Trans. CSAM 2022, 53, 27–33. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, H.; Yang, P.; Meng, Z. Detection Method of Headland Boundary Line Based on Machine Vision. Trans. CSAM 2020, 51, 18–27. [Google Scholar] [CrossRef]
- Li, D.; Li, B.; Long, S.; Feng, H.; Wang, Y.; Wang, J. Robust detection of headland boundary in paddy fields from continuous RGB-D images using hybrid deep neural networks. Comput. Electron. Agric. 2023, 207, 107713. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Li, Y.; Chang, M.; Chen, Z.; Lan, Y.; Wu, C. Real-Time field road freespace extraction for agricultural machinery autonomous driving based on LiDAR. Comput. Electron. Agric. 2023, 211, 108028. [Google Scholar] [CrossRef]
- Turner, R.; Panciera, R.; Tanase, M.A.; Lowell, K.; Hacker, J.M.; Walker, J.P. Estimation of soil surface roughness of agricultural soils using airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Wang, X.; Shu, L.; Han, R.; Yang, F.; Gordon, T.; Wang, X.; Xu, H. A Survey of Farmland Boundary Extraction Technology Based on Remote Sensing Images. Electronics 2023, 12, 1156. [Google Scholar] [CrossRef]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Hou, W.; Zhou, C.; Cheng, Y.; Wang, Y.; Liu, L.; Qin, K. Path recognition method of orchard ridges based on lightweight U-Net. Trans. CSAM 2024, 55, 16–27. [Google Scholar] [CrossRef]
- Gong, J.; Wang, X.; Zhang, Y.; Lan, Y.; Mostafa, K. Navigation line extraction based on root and stalk composite locating points. Comput. Electr. Eng. 2021, 92, 107115. [Google Scholar] [CrossRef]
- Diao, Z.; Guo, P.; Zhang, B.; Zhang, D.; Yan, J.; He, Z.; Zhao, S.; Zhao, C.; Zhang, J. Navigation line extraction algorithm for corn spraying robot based on improved YOLOv8s network. Comput. Electron. Agric. 2023, 212, 108049. [Google Scholar] [CrossRef]
- Yang, Y.; Mang, Q.; Chen, Z.; Wen, X.; Zhang, G.; Zhang, T.; Dong, X.; Chen, L. Real-time extraction of the navigation lines between sugarcane ridges using LiDAR. Trans. CSAE 2022, 38, 178–185. [Google Scholar] [CrossRef]
- Zhou, H.; Yang, Y.; Liu, Y.; Ma, R.; Zhang, F.; Zang, Q. Real-time Extraction of Navigation Line Based on LiDAR. Trans. CSAM 2023, 54, 9–17. [Google Scholar] [CrossRef]
- Wang, S.; Song, J.; Qi, P.; Yuan, C.; Wu, H.; Zhang, L.; Liu, W.; Liu, Y.; He, X. Design and development of orchard autonomous navigation spray system. Front. Plant Sci. 2022, 13, 960686. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Zhang, C.; Zhang, H.; Yang, S.; Jiang, S.; Zheng, Y.; Su, D.; Wan, C. Inter-row automatic navigation method by combining least square and SVM in forestry. Trans. CSAE 2021, 37, 157–164. [Google Scholar] [CrossRef]
- He, Y.; Jiang, H.; Fang, H.; Wang, Y.; Liu, Y. Research progress of intelligent obstacle detection methods of vehicles and their application on agriculture. Trans. Chin. Soc. Agric. Eng. 2018, 34, 21–32. [Google Scholar] [CrossRef]
- Li, Y.; Li, M.; Qi, J.; Zhou, D.; Zou, Z.; Liu, K. Detection of typical obstacles in orchards based on deep convolutional neural network. Comput. Electron. Agric. 2021, 181, 105932. [Google Scholar] [CrossRef]
- Xue, J.; Cheng, F.; Li, Y.; Song, Y.; Mao, T. Detection of Farmland Obstacles Based on an Improved YOLOv5s Algorithm by Using CIoU and Anchor Box Scale Clustering. Sensors 2022, 22, 1790. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Li, S.; Ji, Y.; Cao, R.; Zhang, M. Dynamic obstacle detection based on panoramic vision in the moving state of agricultural machineries. Comput. Electron. Agric. 2021, 184, 106104. [Google Scholar] [CrossRef]
- Du, X.; Li, Z.; Ma, Z.; Yang, Z.; Wang, D. UAV Field Obstacle Detection Based on Spatial Attention and Deformable Convolution. Trans. CSAM 2023, 54, 275–283. [Google Scholar] [CrossRef]
- Shang, Y.; Zhang, G.; Meng, Z.; Wang, H.; Su, C.; Song, Z. Field Obstacle Detection Method of 3D LiDAR Point Cloud Based on Euclidean Clustering. Trans. CSAM 2022, 53, 23–32. [Google Scholar] [CrossRef]
- Wang, T.; Wang, N.; Xiao, J.; Miao, Y.; Sun, Y.; Li, H.; Zhang, M. One-shot domain adaptive real-time 3D obstacle detection in farmland based on semantic-geometry-intensity fusion strategy. Comput. Electron. Agric. 2023, 214, 108264. [Google Scholar] [CrossRef]
- Xue, J.; Cheng, F.; Wang, B.; Li, Y.; Ma, Z.; Chu, Y. Method for Millimeter Wave Radar Farm Obstacle Detection Based on Invalid Target Filtering. Trans. CSAM 2023, 54, 233–240. [Google Scholar] [CrossRef]
- Ball, D.; Upcroft, B.; Wyeth, G.; Corke, P.; English, A.; Ross, P.; Patten, T.; Fitch, R.; Sukkarieh, S.; Bate, A. Vision-based Obstacle Detection and Navigation for an Agricultural Robot. J. Field Robot. 2016, 33, 1107–1130. [Google Scholar] [CrossRef]
- Lv, P.; Wang, B.; Cheng, F.; Xue, J. Multi-Objective Association Detection of Farmland Obstacles Based on Information Fusion of Millimeter Wave Radar and Camera. Sensors 2022, 23, 230. [Google Scholar] [CrossRef]
- Cai, D. Research on Autonomous Operation Perception Technology in Unstructured Farmland Environment. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2020. [Google Scholar]
- Kragh, M.; Underwood, J. Multimodal obstacle detection in unstructured environments with conditional random fields. J. Field Robot. 2020, 37, 53–72. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Liu, H.; Li, J.; Wang, P.; Yang, X. A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm. Agriculture 2024, 14, 865. [Google Scholar] [CrossRef]
- Shen, Y.; Liu, Z.; Liu, H.; Du, W. Orchard Spray Robot Planning Algorithm Based on Multiple Constraints. Trans. CSAM 2023, 54, 56–67. [Google Scholar] [CrossRef]
- Xu, X.; Zeng, J.; Zhao, Y.; Lü, X. Research on global path planning algorithm for mobile robots based on improved A*. Expert Syst. Appl. 2024, 243, 122922. [Google Scholar] [CrossRef]
- Feng, Z.; Zhou, L.; Qi, J.; Hong, S. DBVS-APF-RRT*: A global path planning algorithm with ultra-high speed generation of initial paths and high optimal path quality. Expert Syst. Appl. 2024, 249, 123571. [Google Scholar] [CrossRef]
- Kong, F.; Liu, B.; Han, X.; Yi, L.; Sun, H.; Liu, J.; Liu, L.; Lan, Y. Path Planning Algorithm of Orchard Fertilization Robot Based on Multi-Constrained Bessel Curve. Agriculture 2024, 14, 979. [Google Scholar] [CrossRef]
- Wu, Z.; Dai, J.; Jiang, B.; Karimi, H.R. Robot Path Planning Based on Artificial Potential Field with Deterministic Annealing. ISA Trans. 2023, 138, 74–87. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Zhang, X.; Fan, X.; Feng, W.; Li, P.; Wu, Y. Path planning of autonomous agricultural machineries in complex rural road. J. Eng. 2020, 6, 239–245. [Google Scholar] [CrossRef]
- Boryga, M.; Kołodziej, P.; Gołacki, K. Application of Polynomial Transition Curves for Trajectory Planning on the Headlands. Agriculture 2020, 10, 144. [Google Scholar] [CrossRef]
- He, Y.; Zhou, J.; Sun, J.; Jia, H.; Gemechu, T.-T. Traveling control method adapted to different paddy ground conditions with feedforward compensation for crawler combine harvester based on online tracking error prediction. Comput. Electron. Agric. 2024, 220, 108853. [Google Scholar] [CrossRef]
- He, Y.; Zhou, J.; Yuan, L.; Zheng, P.; Liang, Z. Local Tracking Path Planning Based on Steering Characteristics of Crawler-type Combine Harvester. Trans. CSAM 2022, 53, 13–21. [Google Scholar] [CrossRef]
- He, Y.; Zhou, J.; Sun, J.; Jia, H.; Liang, Z.; Awuah, E. An adaptive control system for path tracking of crawler combine harvester based on paddy ground conditions identification. Comput. Electron. Agric. 2023, 210, 107948. [Google Scholar] [CrossRef]
- Qi, Z.; Zhou, J.; Ye, Z.; Zhou, X.; Yang, H. Local Path Planning Method in Automatic Walking of Single-side Brake Steering Track Chassis. Trans. CSAM 2024, 55, 52–59. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Wen, X.; Zhang, G.; Ma, Q.; Cheng, S.; Qi, J.; Xu, L.; Chen, L. An optimal goal point determination algorithm for automatic navigation of agricultural machinery: Improving the tracking accuracy of the Pure Pursuit algorithm. Comput. Electron. Agric. 2022, 194, 106760. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Kala, R. Multi-robot path planning using co-evolutionary genetic programming. Expert Syst. Appl. 2012, 39, 3817–3831. [Google Scholar] [CrossRef]
- Ab Wahab, M.N.; Nazir, A.; Khalil, A.; Ho, W.J.; Akbar, M.F.; Noor, M.H.M.; Mohamed, A.S.A. Improved genetic algorithm for mobile robot path planning in static environments. Expert Syst. Appl. 2024, 249, 123762. [Google Scholar] [CrossRef]
- Shang, Y.; Shen, J.; Wei, W.; Zheng, B. Optimization of Ball Mill Cylinder Structure Based on Response Surface Optimization Module and Multi-objective Genetic Algorithm. J. Mech. Sci. Technol. 2024, 38, 3631–3640. [Google Scholar] [CrossRef]
- Hilli, A.A.; Al-Ibadi, M.; Alfadhel, A.M.; Abdulshaheed, S.H.; Hadi, A.H. Optimal path finding in stochastic quasi-dynamic environments using particle swarm optimization. Expert Syst. Appl. 2021, 186, 115706. [Google Scholar] [CrossRef]
- Linker, R.; Blass, T. Path-planning algorithm for vehicles operating in orchards. Biosyst. Eng. 2008, 101, 152–160. [Google Scholar] [CrossRef]
- Reda, M.; Onsy, A.; Haikal, A.Y.; Ghanbari, A. Path planning algorithms in the autonomous driving system: A comprehensive review. Robot. Auton. Syst. 2024, 174, 104630. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, T.; Lu, J. Traversal Path Planning for Farmland in Hilly Areas based on Floyd and Im-proved Genetic Algorithm. Smart Agric. 2023, 4, 45–57. [Google Scholar] [CrossRef]
- Xu, L.; You, J.; Yuan, H. Real-Time Parametric Path Planning Algorithm for Agricultural Machinery Kinematics Model Based on Particle Swarm Optimization. Agriculture 2023, 13, 1960. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, S.; Wei, J.; Qin, F. Improved biological neural network approach for path planning of differential drive agricultural robots with arbitrary shape. Comput. Electron. Agric. 2024, 216, 108525. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, Y.; Yang, J.; Li, D.; Wang, Y.; Zhao, R. Many-objective evolutionary algorithm based agricultural mobile robot route planning. Comput. Electron. Agric. 2022, 200, 107274. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.; Cui, J.; Liu, C.; Xiao, W. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Syst. Appl. 2023, 215, 119410. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Z.; Bai, X.; Gao, L. Longitudinal Acceleration Tracking Control of Tractor Cruise System. Trans. CSAM 2018, 49, 21–28. [Google Scholar] [CrossRef]
- Miao, H.; Diao, P.; Xu, G.; Yao, W.; Song, Z.; Wang, W. Research on decoupling control for the longitudinal and lateral dynamics of a tractor considering steering delay. Sci. Rep. 2022, 12, 13997. [Google Scholar] [CrossRef]
- Wang, F.; Yang, Q.; Zhang, Z.; Li, A.; Xu, H. Path Tracking and Turning Control Algorithm of Tracked Vehicle Based on ICR. Trans. CSAM 2024, 55, 386–395. [Google Scholar] [CrossRef]
- Shan, Y.; Zheng, B.; Chen, L.; Chen, L.S.; Chen, D. A Reinforcement Learning-Based Adaptive Path Tracking Approach for Autonomous Driving. IEEE T Veh. Technol. 2020, 69, 10581–10595. [Google Scholar] [CrossRef]
- Zhang, W.; Gai, J.; Zhang, Z.; Tang, L.; Liao, Q.; Ding, Y. Double-DQN based path smoothing and tracking control method for robotic vehicle navigation. Comput. Electron. Agric. 2019, 166, 104985. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, X.; Wang, W.; Song, Y.; Cui, Y. Joint control method based on speed and slip rate switching in plowing operation of wheeled electric tractor equipped with sliding battery pack. Comput. Electron. Agric. 2023, 215, 108426. [Google Scholar] [CrossRef]
- Tan, H.; Wang, G.; Zhou, S.; Jia, H.; Qu, M.; Xiang, M.; Gao, X.; Zhou, Z.; Li, H.; Zou, Z. Design and Experiment of Header Height Adaptive Adjustment System for Maize (Zea mays L.) Harvester. Sustainability 2023, 15, 14137. [Google Scholar] [CrossRef]
- Xue, B.; Zhou, L.; Niu, K.; Zheng, Y.; Bai, S.; Gui, L. Sowing Depth Control System of Wheat Planter Based on Adaptive Fuzzy PID. Trans. CSAM 2023, 54, 93–102. [Google Scholar] [CrossRef]
- Jing, Y.; Liu, G.; Jin, Z. Adaptive Guidance Control Method with Sideslip Estimation for Land Leveler Pulling by Tractor. Trans. CSAM 2020, 51, 26–33. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Sensor Type | Characteristics | Sensing Task |
|---|---|---|---|
| Vision Sensors | Monocular Camera | Monocular cameras are low cost and provide rich image information, but lack depth data and are susceptible to environmental influences. | Farmland boundary detection, navigation line extraction |
| Binocular Camera | Binocular cameras can provide rich image information and highly reliable depth information, but the configuration and calibration are more complicated; the computation is large, and parallax calculation depends on computing resources. | Farmland boundary detection, navigation line extraction | |
| RGB-D Camera | RGB-D camera can provide an RGB map and a depth map, and the calculation amount is small. However, the measurement range is narrow, the noise level is high, the field of view is small, and it is easily interfered with by daylight. | Farmland boundary detection | |
| Radar Sensor | Lidar | LIDAR is highly accurate, stable, and reliable. However, it has a high cost, is susceptible to dust interference with the limited detection range, and cannot recognize color and texture in farmland boundary identification and navigation line extraction. | Navigation line extraction |
| Camera Type | Features | Advantages | Common Cameras |
|---|---|---|---|
| RGB Cameras | A standard color camera that captures images in the red, green, and blue color channels. | RGB cameras provide rich color and texture information that helps distinguish between different types of obstacles, are low cost, and are easy to integrate and deploy. | Logitech C920, Sony Alpha Series (Logitech, Lausanne, Switzerland) |
| Depth Camera | In addition to capturing RGB images, it also acquires depth information for each pixel. | Combining depth information and RGB images improves the accuracy and reliability of obstacle detection, providing more precise obstacle localization, especially in complex environments. | Intel RealSense (Intel, Santa Clara, CA, USA), Microsoft Kinect 360 (Microsoft 360, Washington, DC, USA) |
| Stereo Camera | Captures stereo images through two cameras and uses parallax to calculate depth information. | Provides high-precision depth perception for fine obstacle detection tasks and is more reliable than a single depth camera in terms of detection accuracy and range. | ZED Series (ZED Series, San Francisco, America), Bumblebee2 (Teledyne FLIR, Washington, DC, USA) |
| Panoramic Camera | Capable of capturing images or videos with a 360-degree field of view. | In obstacle detection, it provides a comprehensive view of the environment, reduces blind spots, and improves the coverage and accuracy of obstacle detection. | Ricoh Theta (RICOH, Tōkyō, Japan), Insta360 Pro (insta360, Shenzhen, China) |
| Classification | Common Algorithms | Common Application Areas |
|---|---|---|
| Algorithms based on graph search | Dijkstra, A *, D * | Global path planning |
| Algorithm based on sampling | RRT | Global path planning |
| Algorithms based on artificial potential fields | Artificial potential field method | Local path planning |
| Algorithms based on curve fitting | Arcs and straight lines, polynomial curves, spline curves, Bessel curves, differential flatness | Local path planning |
| Algorithms based on numerical optimization | Describing and solving planning problems using objective functions and constraints | Local path planning |
| Intelligent algorithms based on bionics | Genetic algorithms, particle swarm optimization algorithms, ant colony algorithms | Global path planning, local path planning |
| Step | GA | PSO | ACO |
|---|---|---|---|
| Initialization | Initialize population | Initialize particles | Initialize ants |
| Fitness Eval. | Evaluate fitness | Evaluate fitness | Evaluate fitness |
| Selection | Roulette wheel selection | N/A | Select next node based on probability |
| Crossover | Single-point crossover | N/A | N/A |
| Mutation | Swap mutation | N/A | N/A |
| Update Ind. | Replace individual | Update velocity and position | Update pheromone |
| Update Best | Find best individual | Update global best | Find global best path |
| Iteration Loop | Repeat for max generations | Repeat for max iterations | Repeat for max iterations |
| Return Result | Return best individual | Return global best | Return global best path |
| Algorithm Category | Global Search Ability | Convergence Speed | Computational Complexity | Adaptability | Scalability |
|---|---|---|---|---|---|
| Genetic algorithm | ★★★★ | ★★ | ★★★★ | ★★★★ | ★★★ |
| Particle swarm optimization | ★★★★ | ★★★★★ | ★★★ | ★★★ | ★★★★ |
| Ant colony algorithm | ★★★★★ | ★★★ | ★★★★ | ★★★★ | ★★★★ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, W.; Xiao, M.; Duan, W.; Wang, H.; Zhu, Y.; Zhai, C.; Geng, G. Research Progress on Autonomous Operation Technology for Agricultural Equipment in Large Fields. Agriculture 2024, 14, 1473. https://doi.org/10.3390/agriculture14091473
Wei W, Xiao M, Duan W, Wang H, Zhu Y, Zhai C, Geng G. Research Progress on Autonomous Operation Technology for Agricultural Equipment in Large Fields. Agriculture. 2024; 14(9):1473. https://doi.org/10.3390/agriculture14091473
Chicago/Turabian StyleWei, Wenbo, Maohua Xiao, Weiwei Duan, Hui Wang, Yejun Zhu, Cheng Zhai, and Guosheng Geng. 2024. "Research Progress on Autonomous Operation Technology for Agricultural Equipment in Large Fields" Agriculture 14, no. 9: 1473. https://doi.org/10.3390/agriculture14091473
APA StyleWei, W., Xiao, M., Duan, W., Wang, H., Zhu, Y., Zhai, C., & Geng, G. (2024). Research Progress on Autonomous Operation Technology for Agricultural Equipment in Large Fields. Agriculture, 14(9), 1473. https://doi.org/10.3390/agriculture14091473