
Design and Test of Vertical Axis Rotating Cutters for Cutting Corn Roots and Crown

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
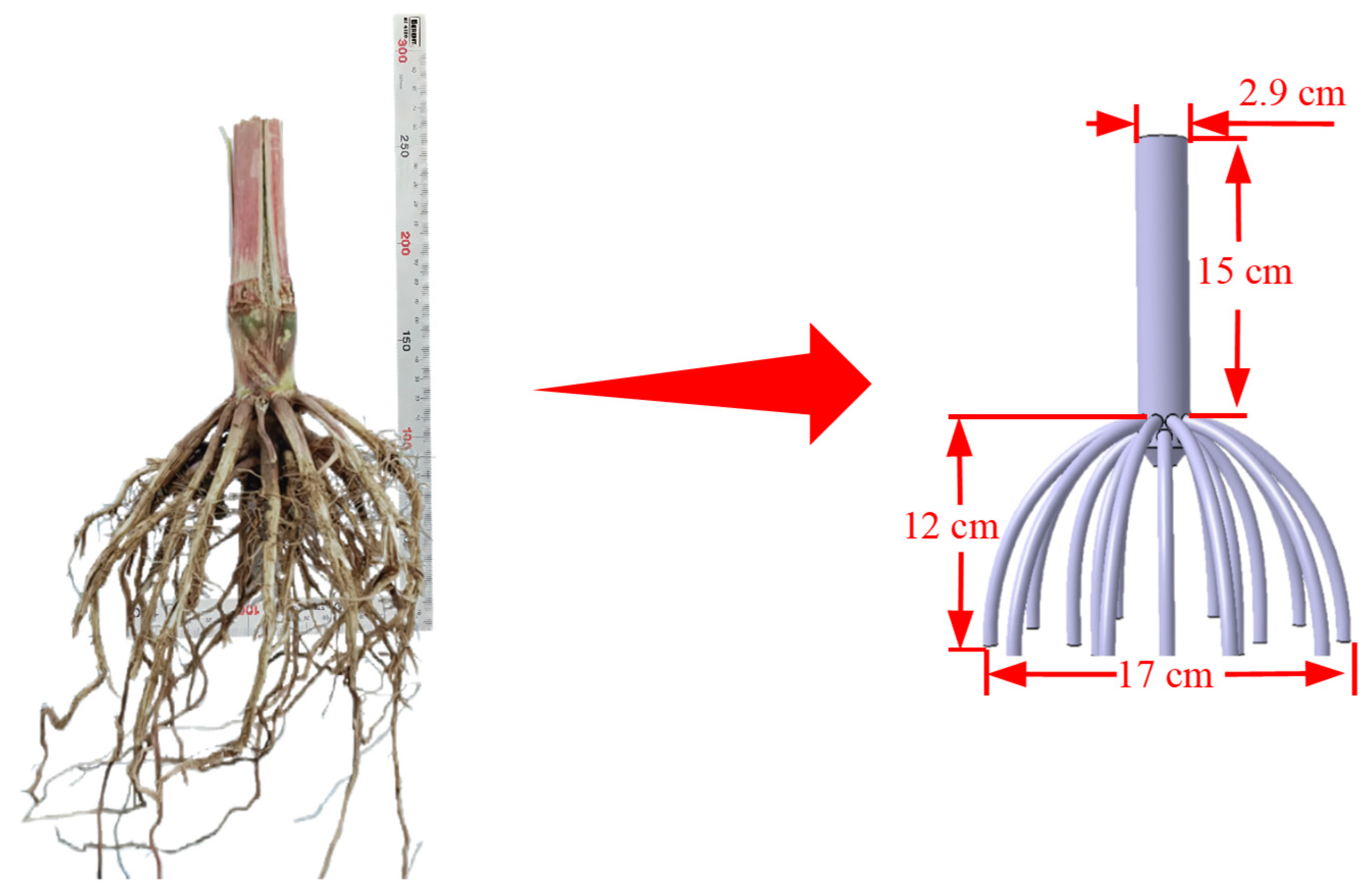
2.1.1. Preparation of Soil and Root–Crowns
2.1.2. Device Integrated by Bionic Cutters and Multi-Curve Cutters
2.2. Methods
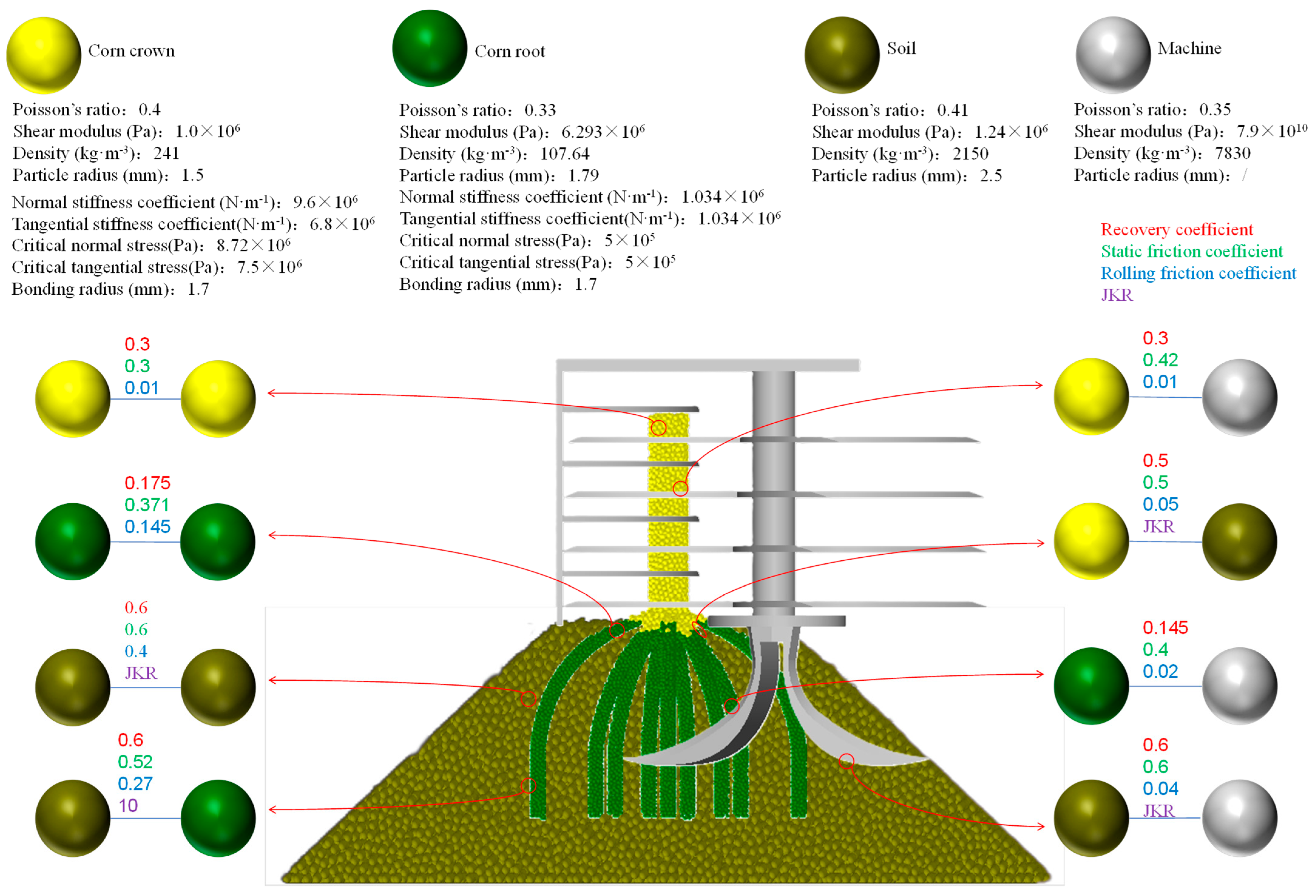
2.2.1. Simulation Test
2.2.2. Full-Factorial Test
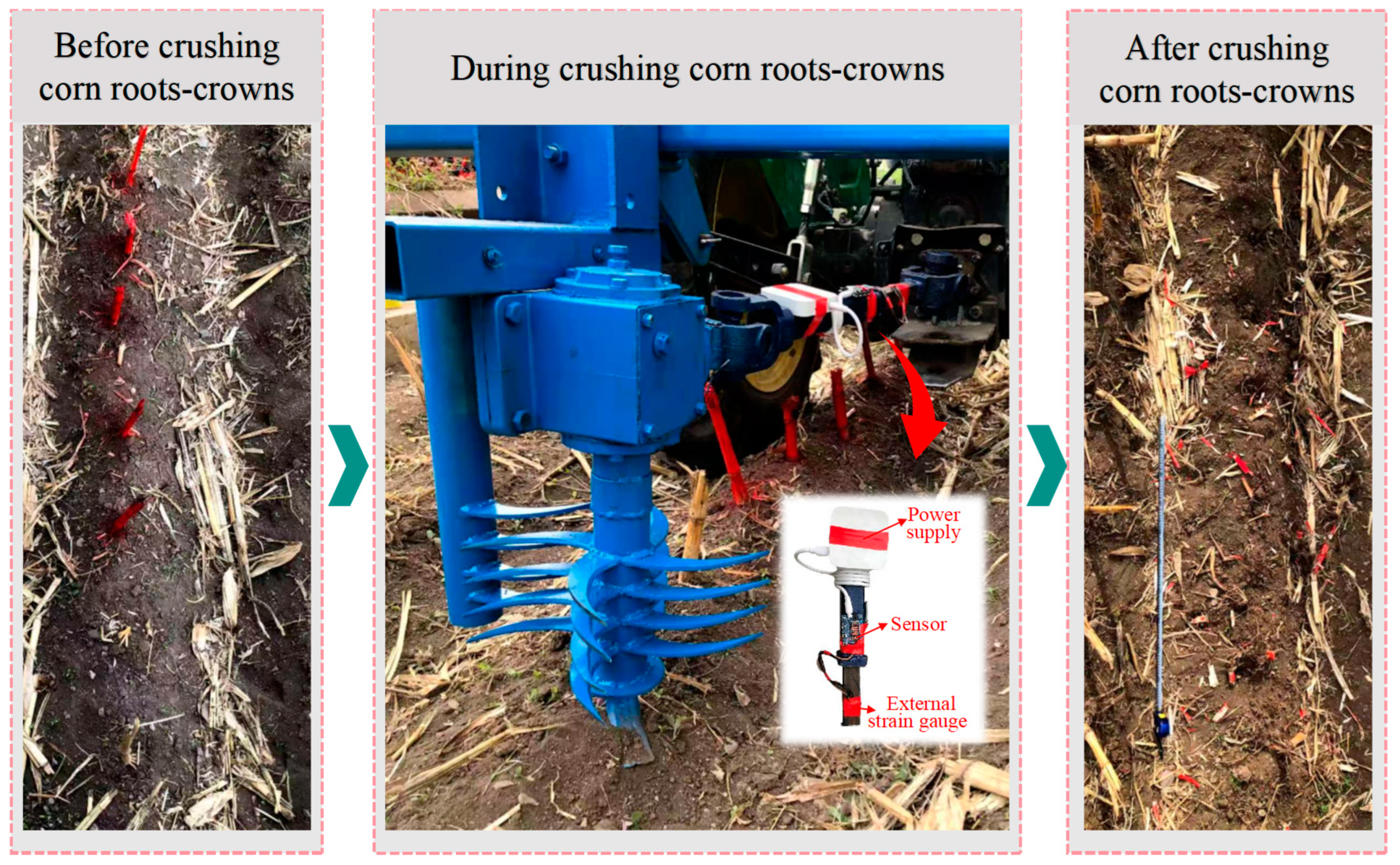
2.2.3. Field Test
3. Results and Discussion
3.1. The Process of Cutting the Root–Crown in the Simulation Test
3.2. Results of the Full-Factor Test
3.2.1. Effect of Different Factors on the Qualified Rate of Root–Crown
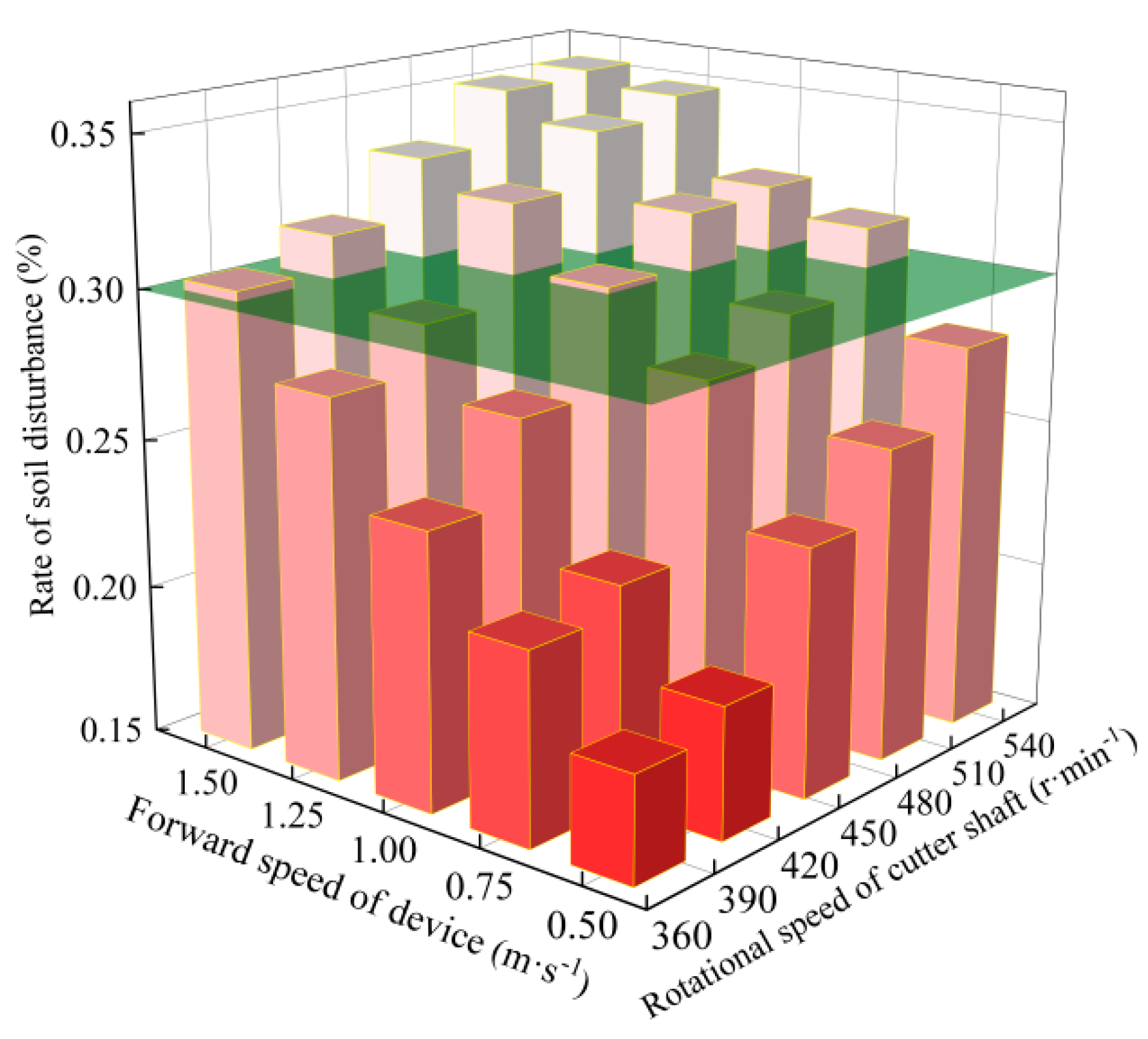
3.2.2. Effect of Different Factors on the Rate of Soil Disturbance
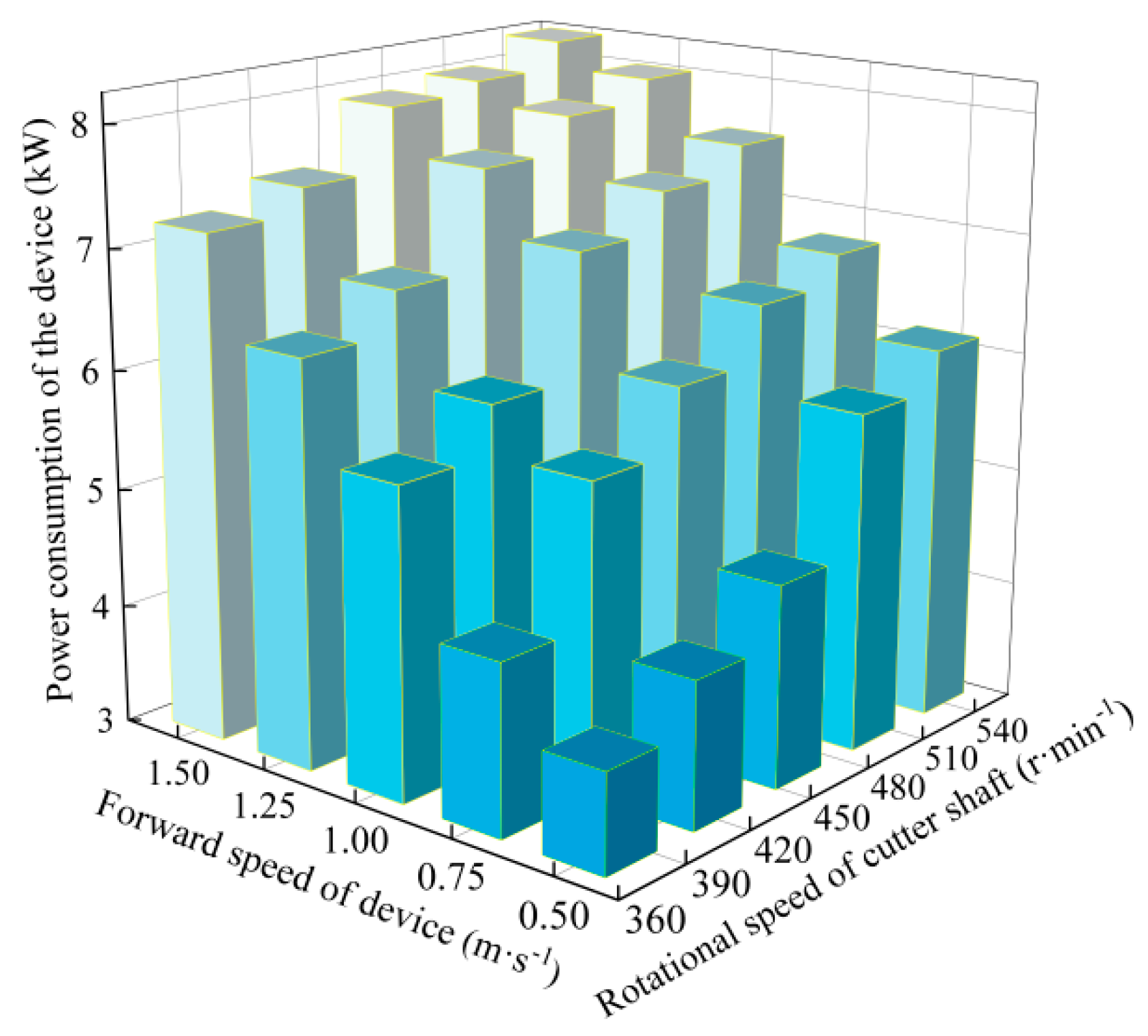
3.2.3. Effect of Different Factors on the Power Consumption of Device
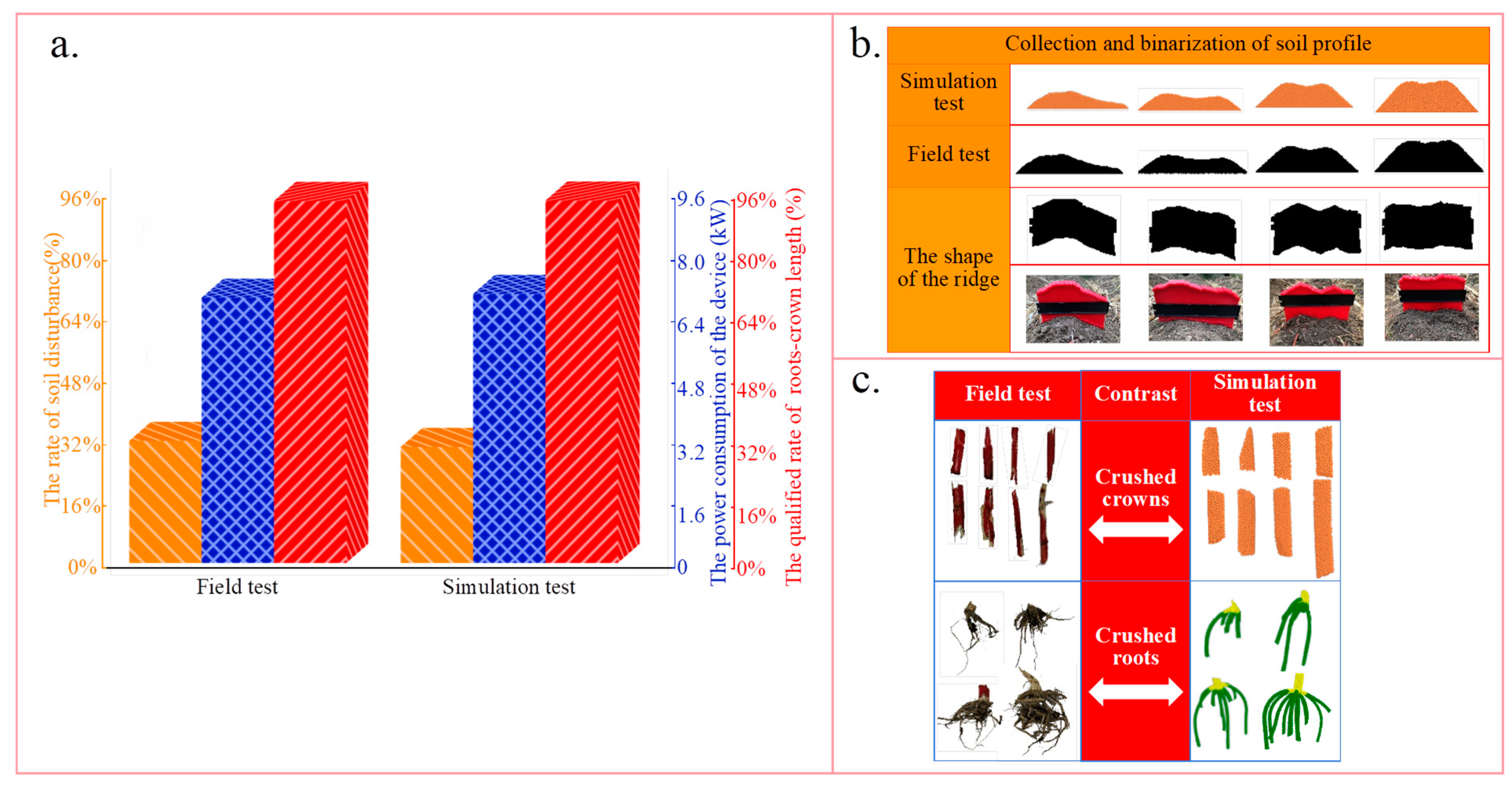
3.3. Consistency of the Results in the Field and Simulation Tests
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, X.; Yao, J.Y.; Gao, Y.P.; Zeng, L.C.; Wang, L.J.; Wang, B.; Yang, Z.L. Review of Root-Stubble Characteristics and Root-Stubble Crushing and Clearing Technologies for Conservation Tillage. Sustainability 2024, 16, 8508. [Google Scholar] [CrossRef]
- Li, M.X.; Jiang, H.; Li, R.D.; Tao, Y.Q.; Li, X.; Qiu, Z.P. Strengthening straw returning by coupling functional microbial agents with organic fertilizers. China Environ. Sci. 2025, 45, 870–881. [Google Scholar]
- Hua, L.; Gao, Y.; Li, D.Y.; Yang, Z.X.; Liu, Z.P. Effects of Different Straw Return Methods on Farmland Carbon Footprint and Water Footprint. Agriculture 2025, 15, 73. [Google Scholar]
- Zhou, G.P.; Gao, S.J.; Lu, Y.H.; Liao, Y.L.; Nie, J.; Cao, W.D. Co-incorporation of green manure and rice straw improves rice production, soil chemical, biochemical and microbiological properties in a typical paddy field in southern China. Soil Tillage Res. 2020, 197, 104499. [Google Scholar]
- Li, S.C.; Diao, P.S.; Li, X.H.; Zhao, Y.L.; Zhao, H.L.; Zhao, H.D. Design and Optimization for Straw Treatment Device Using Discrete Element Method (DEM). Agriculture 2025, 15, 152. [Google Scholar] [CrossRef]
- Zhao, H.B.; He, J.; Zheng, Z.Q.; Zhang, Z.G.; Liu, W.Z. Strip tillage inter-row residue side-throwing device of no/minimum-till seeder for anti-blocking and seedbed-cleaning. Trans. CSAM 2018, 51, 24–34. [Google Scholar]
- Zhao, H.B.; He, J.; Li, H.W.; Liu, C.G.; Zheng, K.; Zhang, Z.Q. Design and experiment of strip rotary-cut-throw anti-blocking implement. Trans. CSAM 2018, 49, 65–75. [Google Scholar]
- Liao, Q.X.; Xie, H.M.; Zhang, Q.S.; Zhang, J.Q.; Ao, Q.; Wang, L. Design and Experiment of Driven Disc Plow and Double-edged Rotary Tillage Combined Tiller. Trans. CSAM 2023, 54, 99–110,195. [Google Scholar]
- Yao, W.Y.; Diao, P.S.; Miao, H.Q.; Li, S.C. Design and Experiment of Anti-Blocking Components for Shallow Stubble Clearing Based on Soil Bin Test. Agriculture 2022, 12, 1728. [Google Scholar] [CrossRef]
- Lin, J.; Lv, Z.Y.; Li, H.Z.; Wang, X.Y.; Wang, D.R. Design and Experiment of Passive Anti-winding Stubble Breaking and Ridge Cleaning Device for No-tillage Planter. Trans. CSAM 2023, 54, 19–27. [Google Scholar]
- Wang, H.Y.; Ge, Z.W.; Yong, C.M.; You, Y.; Li, Z.H.; Li, C.R.; Lu, Q.Q.; Wang, D.C.; Fang, X.F. Optimization and testing of the bionic chopping cutter for silage maize. Trans. CSAE 2025, 41, 87–97. [Google Scholar]
- Zhao, Z.; Wang, Z.G.; Zhao, B.T.; Song, Y.Q.; Xin, M.J. Design and research of a cutting of a cutting blade for corn stalks based on a bionic principle. INMATEH Agric. Eng. 2022, 63, 3. [Google Scholar]
- Qi, H.Y.; Ma, Z.C.; Xu, Z.H.; Wang, S.; Ma, Y.H.; Wu, S.Y.; Guo, M.Z. The Design and Experimental Validation of a Biomimetic Stubble-Cutting Device Inspired by a Leaf-Cutting Ant’s Mandibles. Biomimetics 2023, 8, 555. [Google Scholar] [CrossRef]
- Hu, J.P.; Xu, L.Z.; Yu, Y.; Lu, J.; Han, D.L.; Chai, X.Y.; Wu, Q.H.; Zhu, L.J. Design and Experiment of Bionic Straw-Cutting Blades Based on Locusta Migratoria Manilensis. Agriculture 2023, 13, 2231. [Google Scholar] [CrossRef]
- Qian, J.; Ma, S.C.; Xu, Y.; Li, W.Y.; Wang, C.Y.; Yang, S.; Wang, F.L. Experimental study on the sugarcane stubble base-cutting mechanism. Biosyst. Eng. 2024, 245, 122–134. [Google Scholar]
- Gu, F.W.; Zhao, Y.Q.; Wu, F.; Hu, Z.C.; Shi, L.L. Simulation analysis and experimental validation of conveying device in uniform rushed straw throwing and seed-sowing Machines using CFD-DEM coupled approach. Comput. Electron. Agric. 2022, 193, 106720. [Google Scholar]
- Cao, X.P.; Wang, Q.J.; Li, H.W.; He, J.; Lu, C.Y. Research with Side Cutter and Stubble Clean Disk of Corn No-till Seeder. Trans. CSAM 2021, 52, 36–44. [Google Scholar]
- Zhao, S.H.; Wang, J.Y.; Yang, C.; Chen, J.Q.; Yang, Y.Q. Design and experiment of stubble chopper under conservation tillage. Trans. CSAM 2019, 50, 57–68. [Google Scholar]
- Liu, X.T.; Qi, H.Y.; Wang, S.; Xu, Z.H.; Gao, P.; Fu, D.P.; Ma, Y.H. The Design and Experimentation of a Wing-Shaped Stubble-Breaking Device for Maize Stubbles. Agriculture 2024, 14, 2108. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Y.L.; Henderson, M.; Wang, G.B.; Chen, M.Y.; Fu, Y.; Dou, Z.Y.; Zhou, W.Y.; Huang, W.W.; Liu, B.H. Effect of Land Use Type on Soil Moisture Dynamics in the Sloping Lands of the Black Soil (Mollisols) Region of Northeast China. Agriculture 2024, 14, 1261. [Google Scholar] [CrossRef]
- GB/T 6435-2014; Determination of Moisture in Feeds. Standards Press of China: Beijing, China, 2014.
- Xu, C.C.; Zhang, P.; Wang, Y.Y.; Luo, N.; Tian, B.J.; Liu, X.W.; Wang, P.; Huang, S.B. Grain yield and grain moisture associations with leaf, stem and root characteristics in maize. J. Integr. Agric. 2022, 21, 1941–1951. [Google Scholar]
- Sun, Y.X.; Dou, G.Z.; Duan, W.B.; Chen, X.H.; Zheng, J.; Xin, L.M.; Bai, L. Involute-arc-leg for Multi-legged Robot: High Stability and Low Energy Consumption. Mech. Mach. Theory 2022, 170, 104701. [Google Scholar]
- Tang, Z.Y.; Gong, H.; Wu, S.L.; Zeng, Z.W.; Wang, Z.Q.; Zhou, Y.H.; Fu, D.B.; Liu, C.; Cai, Y.H.; Qi, L. Modelling of paddy soil using the CFD-DEM coupling method. Soil Tillage Res. 2023, 226, 105591. [Google Scholar]
- Zhang, S.L.; Zhao, H.B.; Wang, X.Z.; Dong, J.X.; Zhao, P.F.; Yang, F.F.; Chen, X.H.; Liu, F.; Huang, Y.X. Discrete element modeling and shear properties of the maize stubble-soil complex. Comput. Electron. Agric. 2023, 204, 107519. [Google Scholar]
- Yuan, Y.W.; Wang, J.Y.; Zhang, X.; Zhao, S.H. Effect of Rotary Speed on Soil and Straw Throwing Process by Stubble-Crushing Blade for Strip Tillage Using DEM-CFD. Agriculture 2023, 13, 877. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, M.; Chen, W.; Yuan, D.; Wu, C.Y.; Zhu, J.P. Simulation Analysis and Experiments for Blade-Soil-Straw Interaction under Deep Ploughing Based on the Discrete Element Method. Agriculture 2023, 13, 136. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Z.M.; Zhang, Z.H.; Zhang, K.; Yao, S.; Zhou, W.Q.; Sun, X.B.; Wang, J.W. Design and Test of Bionic Elastic Row Cleaner with Improved Straw Cleaning Performance. Agriculture 2024, 14, 186. [Google Scholar] [CrossRef]
- Shi, Y.Y.; Rex, S.X.; Wang, X.C.; Hu, Z.C.; Newman, D.; Ding, W.M. Numerical simulation and field tests of minimum-tillage planter with straw smashing and strip laying based on EDEM software. Comput. Electron. Agric. 2019, 166, 105021. [Google Scholar]
- Hou, S.Y.; Ji, Z.C.; Xue, D.H.; Wang, X.; Feng, B.J.; Chen, H.T. Improved Design and Test of Straw Cleaning Device Suitable for No-tillage Seeding Unit. Trans. CSAM 2023, 54, 111–122. [Google Scholar]
- Xiao, M.H.; Niu, Y.; Wang, K.X.; Zhu, Y.J.; Zhou, J.P.; Ma, R.Q. Design of Self-excited Vibrating Rotary Tiller and Analysis of Its Performance in Reducing Torsion and Consumption. Trans. CSAM 2022, 53, 52–63. [Google Scholar]
- Hou, S.Y.; Chen, H.T.; Zhou, Z.; Wei, Z.P.; Zhang, Y.L. Design and test of lateral stubble cleaning blade for corn stubble field. Trans. CSAE 2020, 36, 59–69. [Google Scholar]
- Zhang, S.L.; Huang, Y.X.; Gao, X.J.; Bi, Y.B.; Dong, J.X.; Zhao, H.B.; Zhao, P.F.; Jia, X. Evaluating the influence of straight-plain types of rotary tiller blades with various edge curves on maize residue using DEM. Biosyst. Eng. 2025, 250, 49–61. [Google Scholar] [CrossRef]
- Zhao, Z.; Hou, J.L.; Guo, P.; Xia, C.; Yan, H.P.; Wang, D.W. Analysis of Soil-Straw Movement Behavior in Saline-Alkali Soil Under Dual-Axis Rotary Tillage Based on EDEM. Agriculture 2025, 15, 337. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.Y.; Li, H.W.; He, J.; Lu, C.Y.; Liu, D. Design and Experiment of Rice Straw Chopping Device for Agitation Sliding Cutting and Tearing. Trans. CSAM 2021, 52, 28–40. [Google Scholar]
- GB/T 24675.5-2021; SAC/TC 201 (National Agricultural Machinery Standardization Technical Committee). Conservation Tillage Equipment-Part 5: Smashed Root Stubble Machine. Standards Press of China: Beijing, China, 2021.
- Zhai, S.K.; Shi, Y.X.; Zhou, J.C.; Liu, J.F.; Huang, D.F.; Zou, A.R.; Jiang, P. Simulation Optimization and Experimental Study of the Working Performance of a Vertical Rotary Tiller Based on the Discrete Element Method. Actuators 2022, 11, 342. [Google Scholar] [CrossRef]
- Zhao, J.L.; Lu, Y.; Wang, X.G.; Zhuang, J.; Han, Z.W. A bionic profiling-energy storage device based on MBD-DEM coupled simulation optimization reducing the energy consumption of deep loosening. Soil Tillage Res. 2023, 234, 105824. [Google Scholar] [CrossRef]
- General Office of the Ministry of Agriculture and Rural Affairs, General Office of the Ministry of Finance. Notice on Printing and Distributing the “Implementation Guidance Opinions for the Conservation Tillage Action Plan for Northeast Black Soil Regions”. In Gazette of the Ministry of Agriculture and Rural Affairs of the People’s Republic of China; Ministry of Agriculture and Rural Affairs, PRC: Beijing, China, 2020; Volume 4, pp. 41–44. [Google Scholar]
- Li, X.; Zhang, Y.P.; He, H.J.; Wang, B.; Zhou, H.; Geng, D.Y.; Zhang, Y.Z. Design and Experiment of Row Cleaner with Staggered Disc Teeth for No-Till Planter. Agriculture 2023, 13, 1373. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Level | Forward Speed of Device (m·s−1) | Rotational Speed of Cutter Shaft (r·min−1) |
|---|---|---|
| 1 | 0.71 | 380 |
| 2 | 0.84 | 420 |
| 3 | 1.01 | 460 |
| 4 | 1.20 | 500 |
| 5 | 1.43 | 540 |
| Source | Sum of Squares | df | Mean Square | F Value | p-Value Prob > F |
|---|---|---|---|---|---|
| Model | 0.15 | 24 | 6.305 × 10−3 | 346.30 | <0.0001 |
| A | 0.042 | 4 | 0.011 | 577.07 | <0.0001 |
| B | 0.10 | 4 | 0.026 | 1402.23 | <0.0001 |
| AB | 7.175 × 10−3 | 16 | 4.484 × 10−4 | 24.63 | <0.0001 |
| Pure Error | 9.104 × 10−4 | 50 | 1.821 × 10−5 | ||
| Cor Total | 0.15 | 74 |
| Source | Sum of Squares | df | Mean Square | F Value | p-Value Prob > F |
|---|---|---|---|---|---|
| Model | 0.17 | 24 | 7.229 × 10−3 | 4952.96 | <0.0001 |
| A | 0.100 | 4 | 0.025 | 17,068.60 | <0.0001 |
| B | 0.069 | 4 | 0.017 | 11,887.03 | <0.0001 |
| AB | 4.449 × 10−3 | 16 | 2.781 × 10−4 | 190.54 | <0.0001 |
| Pure Error | 7.297 × 10−5 | 50 | 1.459 × 10−6 | ||
| Cor Total | 0.17 | 74 |
| Source | Sum of Squares | df | Mean Square | F Value | p-Value Prob > F |
|---|---|---|---|---|---|
| Model | 116.31 | 24 | 4.85 | 85,736.39 | <0.0001 |
| A | 76.57 | 4 | 19.14 | 3.387 × 105 | <0.0001 |
| B | 35.88 | 4 | 8.97 | 1.587 × 105 | <0.0001 |
| AB | 3.86 | 16 | 0.24 | 4270.63 | <0.0001 |
| Pure Error | 2.826 × 10−3 | 50 | 5.652 × 10−5 | ||
| Cor Total | 116.31 | 74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Xie, C.; Tong, J.; Guo, S.; Qi, B.; Gao, Y.; Wang, L.; Wang, Q. Design and Test of Vertical Axis Rotating Cutters for Cutting Corn Roots and Crown. Agriculture 2025, 15, 717. https://doi.org/10.3390/agriculture15070717
Feng X, Xie C, Tong J, Guo S, Qi B, Gao Y, Wang L, Wang Q. Design and Test of Vertical Axis Rotating Cutters for Cutting Corn Roots and Crown. Agriculture. 2025; 15(7):717. https://doi.org/10.3390/agriculture15070717
Chicago/Turabian StyleFeng, Xin, Chenggong Xie, Jiarui Tong, Shunchang Guo, Bendi Qi, Yunpeng Gao, Lijun Wang, and Qi Wang. 2025. "Design and Test of Vertical Axis Rotating Cutters for Cutting Corn Roots and Crown" Agriculture 15, no. 7: 717. https://doi.org/10.3390/agriculture15070717
APA StyleFeng, X., Xie, C., Tong, J., Guo, S., Qi, B., Gao, Y., Wang, L., & Wang, Q. (2025). Design and Test of Vertical Axis Rotating Cutters for Cutting Corn Roots and Crown. Agriculture, 15(7), 717. https://doi.org/10.3390/agriculture15070717