2.1. Functions for Description of Ice Conditions
Information on ice conditions has key importance when planning routes for vessels in ice-covered waters. Two main factors are considered in our model: level ice thickness and ice concentration.
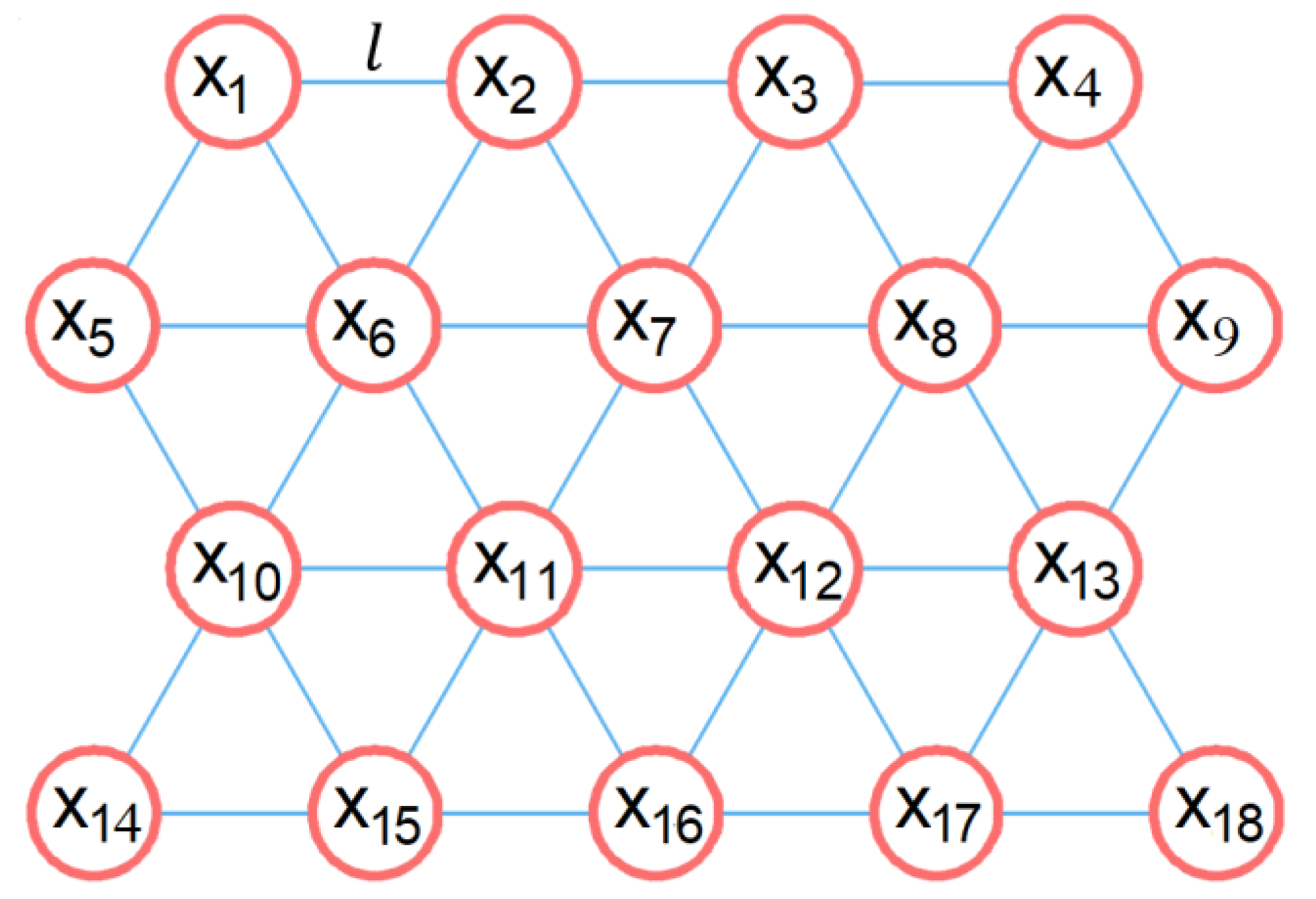
Let the information on level ice thickness and ice concentration be contained in segmentation and coloring of an area of interest in an ice chart. Let us define a graph in such a part of the ice chart, where each vertex of the graph belongs to a region of certain ice thickness and ice concentration (including zero values of these parameters), and all of the vertices and edges are positioned in places with proper depth.
Let the functions and denote the level ice thickness and ice concentration, respectively. Their domain is a continuous water area in the ice chart. In our model, we use discrete with , where = the number of possible ice level thicknesses. Similarly, for function : , where —values of ice concentration in the considered area of the ice chart. Now, we can define the functions and for all of the graph .
2.2. Ship Speed Modeling
Another aspect that should be considered when planning routes of ships in ice is ship performance. At first, the routing model should take into account the parameters of a vessel to assess the possibility of operating this vessel in certain ice conditions. Secondly, since ice resists the movement of a vessel, its speed differs in different parts of the route, depending on the ice conditions. Our routing model takes into account the variability of the vessel speed depending on level ice thickness and ice concentration.
Numerous studies on ship performance in level ice are known in the literature, for example [
7,
14,
15,
16]. This work does not aim to develop a new model of ship performance in ice. Therefore, to estimate the speed of a vessel’s movement depending on ice conditions, we use a model developed earlier by Kaj Riska. A detailed description of this ship performance model can be found in [
7]. Let us consider general provisions of it in relation to ice conditions. Let us divide the procedure of calculating the ship speed
on an edge between two adjacent vertices into two stages:
Step 1. Calculation of the ship speed depending only on the level ice thickness, .
The basis for calculating the ship speed is a comparison of two values: total ice resistance
and net thrust
, namely, the equality (1):
The left and the right parts of this equation can be expanded as follows [
7]:
All designations found in Formulas (2)–(6) are given in the Nomenclature section at the end of the paper, and values
required for calculating constants
and
are presented in
Table 1.
Step 2. Calculation of ship speed depending on both ice thickness and ice concentration,.
Considering that
is the ship speed in open water and
is the ship speed in the level of ice thickness
, an estimate of the effect of both ice thickness and ice concentration on the ship speed can be performed using the following formula:
In [
7], values of
and
in terms of ice concentration score are proposed. However, for our case study, we have taken a more conservative
assuming that a vessel decreases its velocity at the surrounding ice concentration of 40%. Such a choice was made for illustrating ship velocity variability on the particular ice chart of the case study. The influence of vessel characteristics on values of
and
in design Formula (7) should be better investigated in the future.
Using parameters of a particular vessel and knowing ice thickness and concentration in each vertex , we can evaluate the function for that vertex by means of (1)–(7). Now, we have all the necessary parameters to move on to the next paragraph, which describes the routing model we developed and the methods and algorithms for its implementation.
2.3. Optimization Methods and Algorithm
A route is an ordered sequence of adjacent vertices of a graph, and there are no cycles in this sequence. Let vertices and be the start and finish points of the route to be found, respectively: , . Here, is the set of all possible acyclic routes from the node to the node on the graph .
Let us consider objective functions for our optimization model. Let the function
take on the value of the length of a route
from the set
:
Here,
is the length of the graph edge. Optimal routes with respect to the first objective function satisfy the following criterion:
where
is a route from the set of equally optimal routes by the criterion (9).
Let functions
and
take the maximum possible value of level ice thickness and ice concentration on the route
, respectively:
Then, we consider the following conditions (12) and (13) for objective functions
and
, which provide us with sets
and
of routes:
Here, and are the threshold values for functions and , respectively. This way, the objective functions and define acceptable risks along the route.
Using the fact that and are discrete functions, we can consider all the possible combinations of pairs and solve the problem (9) with respect to (12) and (13) for each of the pair.
Sometimes, the length of the route is not the most important parameter for choosing a favorable route for a vessel. Hence, we introduce an additional function
, which takes on the value of the ship travel time (11) on the route.
The authors use the idea of a wave algorithm for the following optimization method. The wave algorithm is based on sequential indexing of adjacent graph vertices. The initial vertex is . Wave propagation across the graph and indexing of vertices is performed until the vertex is reached. Then, in reverse propagation, the minimum length route is found.
The authors of this paper have developed an additional algorithm that expands the capabilities of the wave method. The concept of the extended wave algorithm (EWA) allows us to find the entire set of the equally shortest routes from the start to the finish on graph by means of recursive function using the indices assigned for the vertices.
Thus, the objective functions and the optimization method for the problem of finding the optimal route of the vessel in ice conditions has been determined. It is clear that without knowing which of the functions is the most preferable, it is impossible to find the only optimal solution for the problem. Nevertheless, we can find sets of Pareto-optimal solutions for the considered combination of objective functions. We say that the route is Pareto-optimal if none of its legs can be changed without worsening at least one of the considered objective functions for this route [
17].
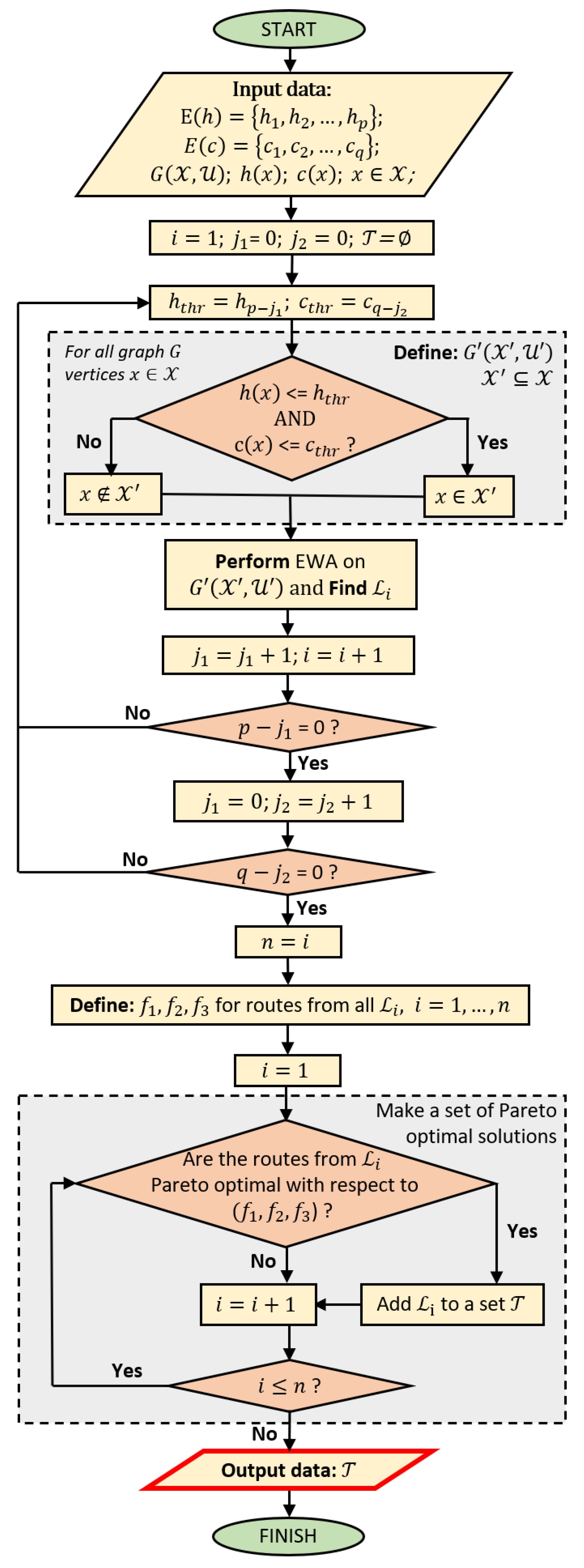
Let us introduce Algorithm 1 for finding a complete set of Pareto-optimal solutions
for objective functions
. A block diagram for the algorithm is presented in
Figure 2. The developed algorithm is based on checking all pairs
. For each of these pairs, we form a new graph
, employ the EWA with a recursive function in the backpropagation search, and find the set
of equally optimal solutions of (9) on
. Not every
found for a particular pair
belongs to the set
of Pareto-optimal routes. An additional examination of routes’ non-deterioration in the sense of their objective values
when shifting from
is required.
In a general case, the cardinality of set
is quite big. We can consider the fourth objective function (14) and find optimal routes in regard to
, which will provide us with the solution of the problem with lexicographically ordered criteria:






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







