
Multi-Objective Weather Routing Algorithm for Ships: The Perspective of Shipping Company’s Navigation Strategy

Abstract
:1. Introduction
- Proposal of a multi-objective ACO algorithm
- 2.
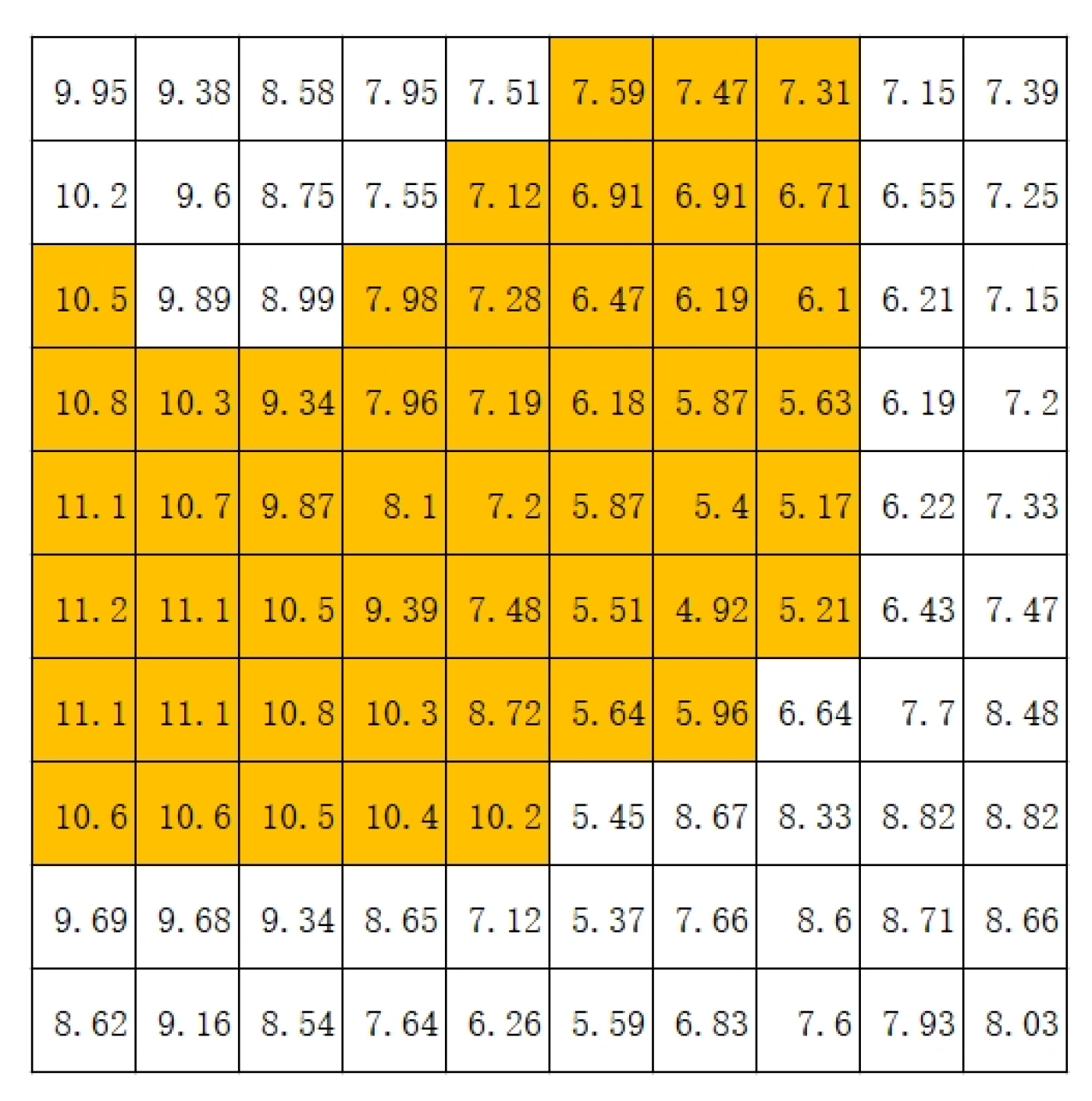
- Proposal of the concept of “Operational Obstacle”
- 3.
- Analysis from the perspective of the shipping company’s route strategy
2. Materials and Methods
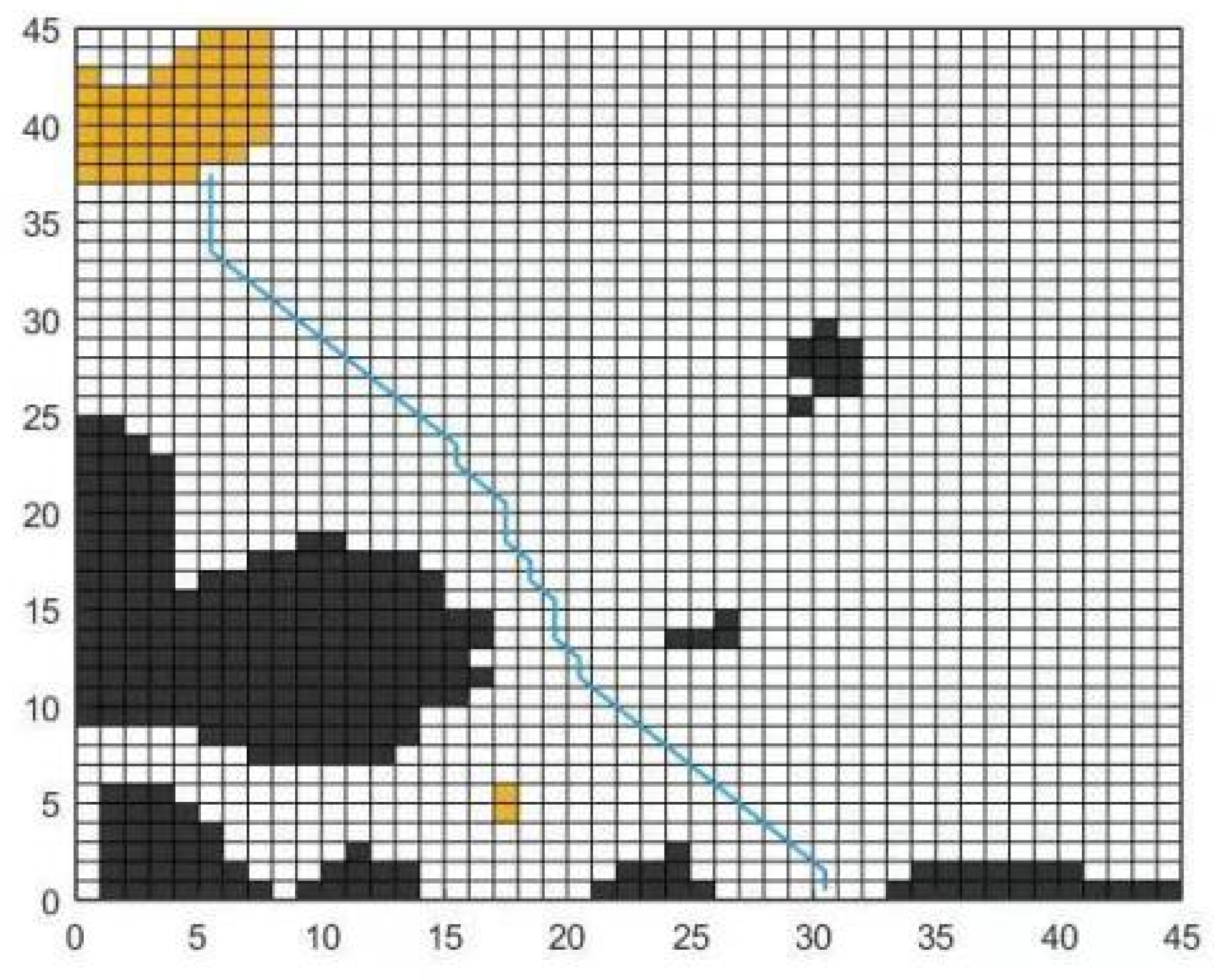
2.1. Grid Method Environment Modeling
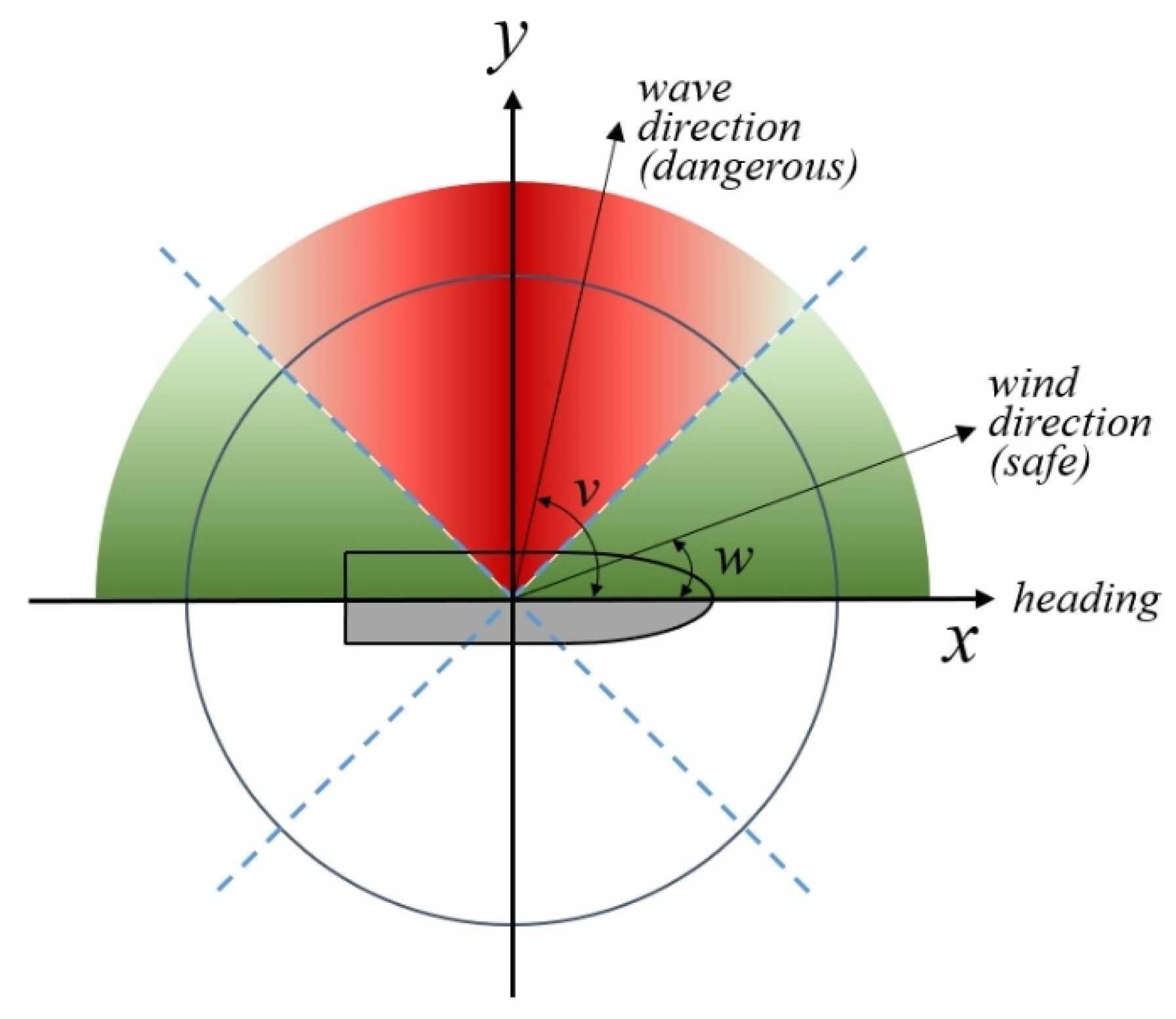
2.2. Impact of Wind and Waves on Ship Stall
2.3. Fuel Consumption Cost Calculation for Ships
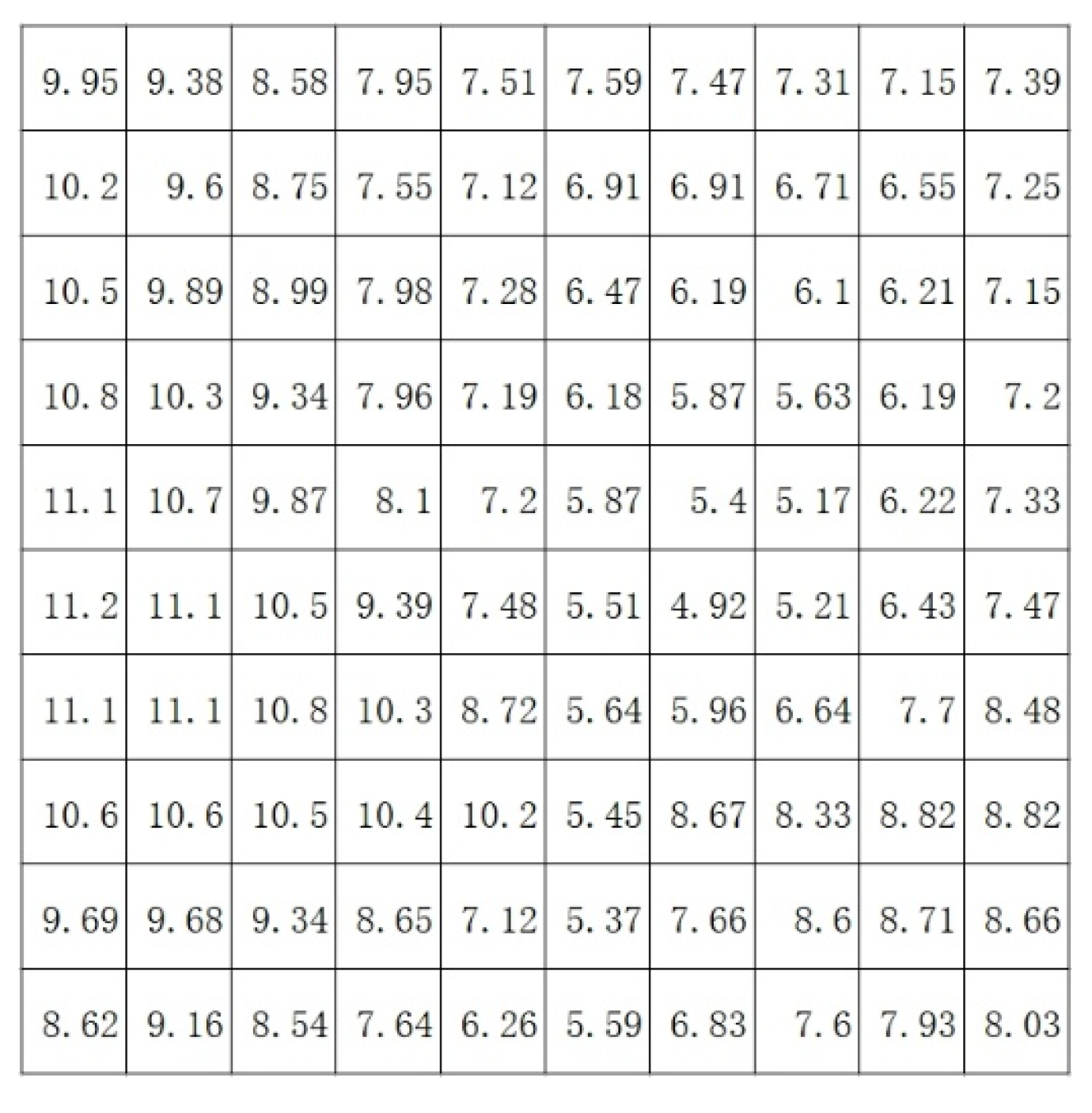
2.4. Ship Navigation Risk
2.5. Improved Multi-Objective Ant Colony Optimization (IMACO) Algorithm
- (1)
- Inputting the ACO working environment grid obtained by composing marine physical obstacles and operational obstacles.
- (2)
- Inputting the initial pheromone matrix, selecting the initial point and end point, and setting the number of iterations, the number of ants, the importance of pheromone (), the importance of heuristic factor (), the pheromone evaporation coefficient (), and the pheromone increase intensity coefficient (). In this paper, we set the initial pheromone at all positions equal.
- (3)
- Selecting the nodes that can be reached in the next step from the initial point, calculating the probability of going to each node according to the pheromone of each node, and using the roulette algorithm to select the initial point of the next step. Thus, the k th ant performs path selection according to the roulette equation given by:where is the pheromone between nodes and at the th iteration; is the heuristic information associated with arc ; and are the weight parameters of and , respectively.
- (4)
- Updating the route and the length of the route.
- (5)
- Repeating step (3) and (4) until the ants reach the endpoint or there is no way to go.
- (6)
- Repeating step (3)–(5) until the iteration of a certain generation of m ants ends.
- (7)
- Updating the pheromone matrix, in which the ants that have not arrived are not counted.
- (8)
- Repeating step (3)–(7) until the end of the n-generation ant iteration.
3. Result and Discussion
3.1. Experimental Design
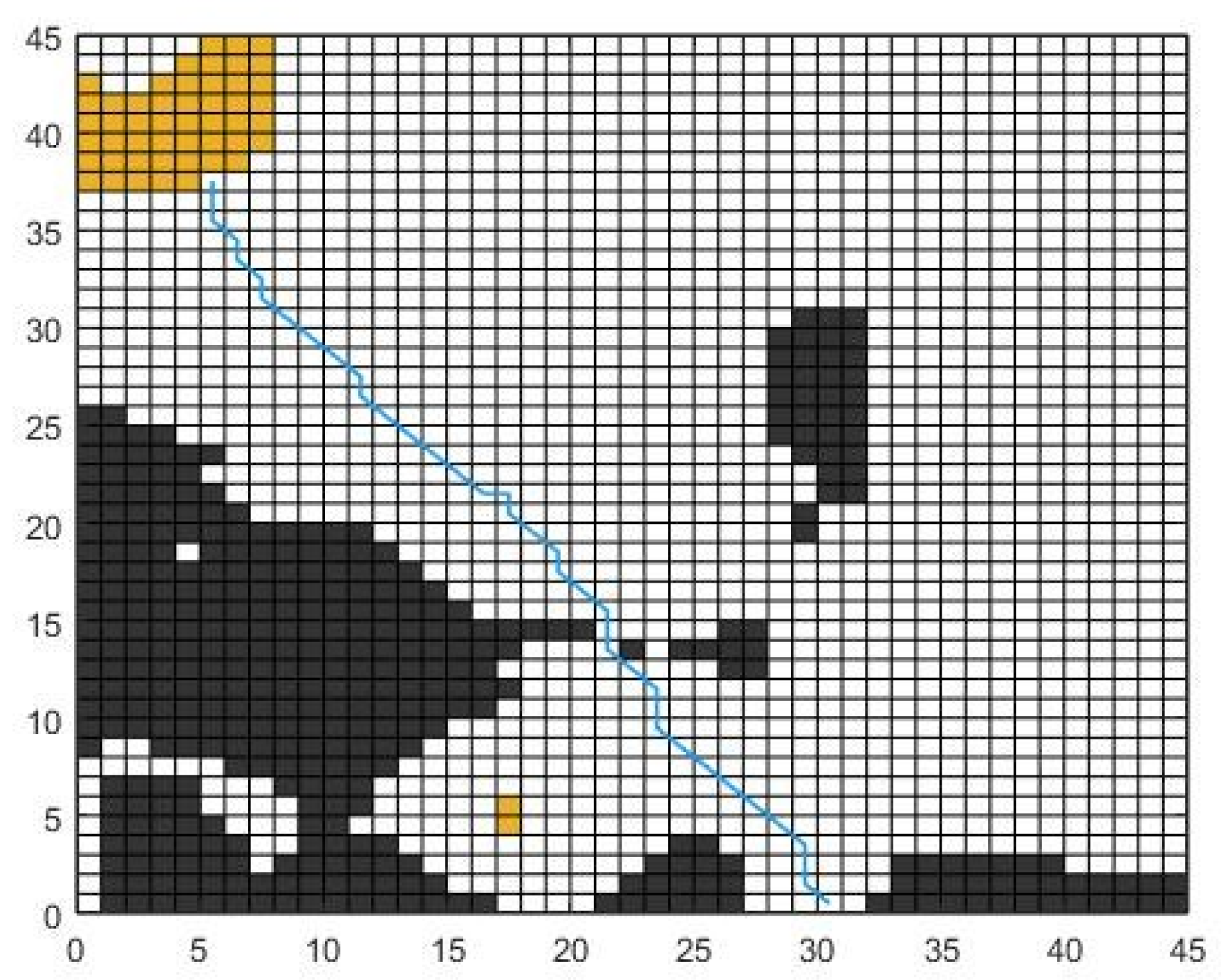
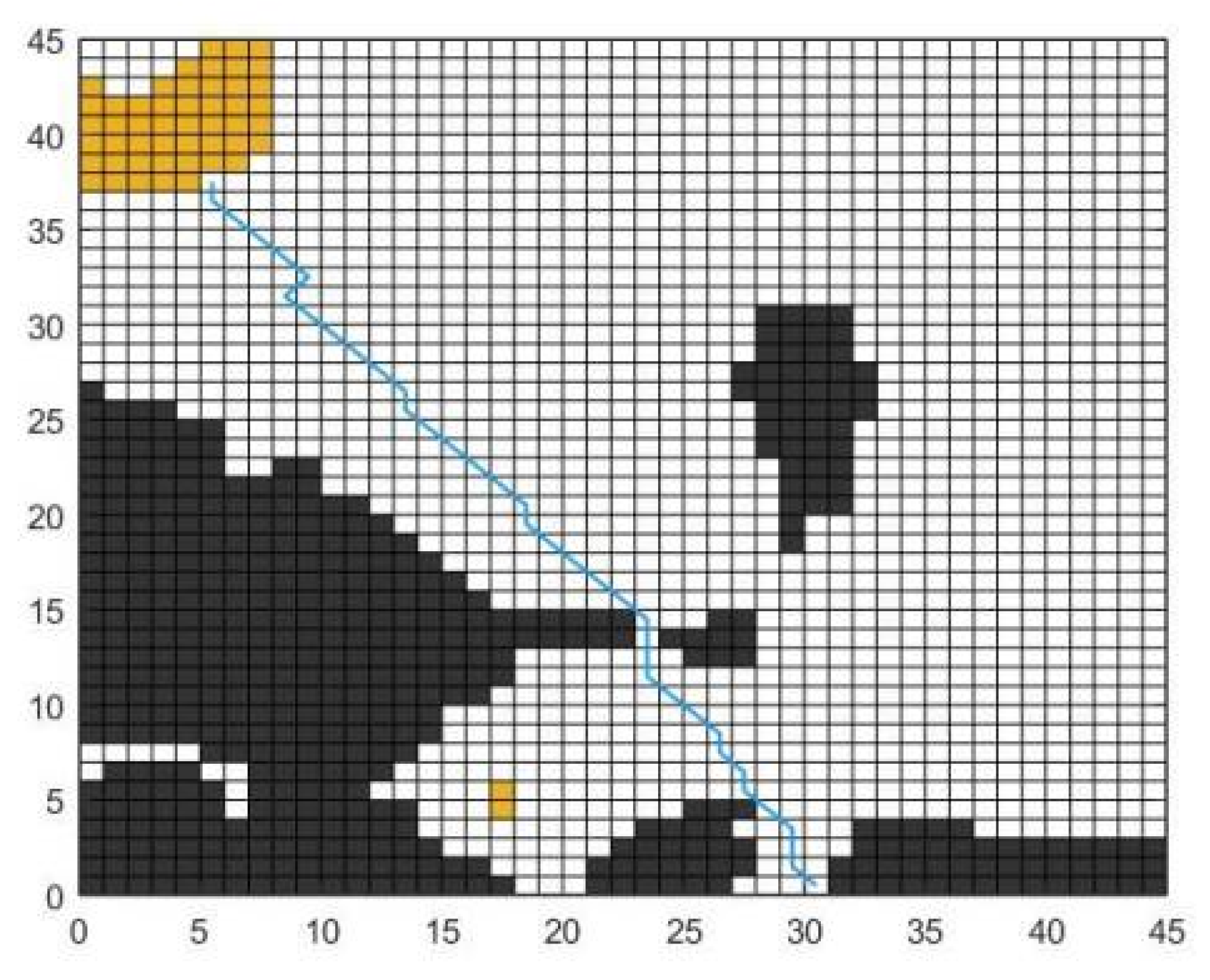
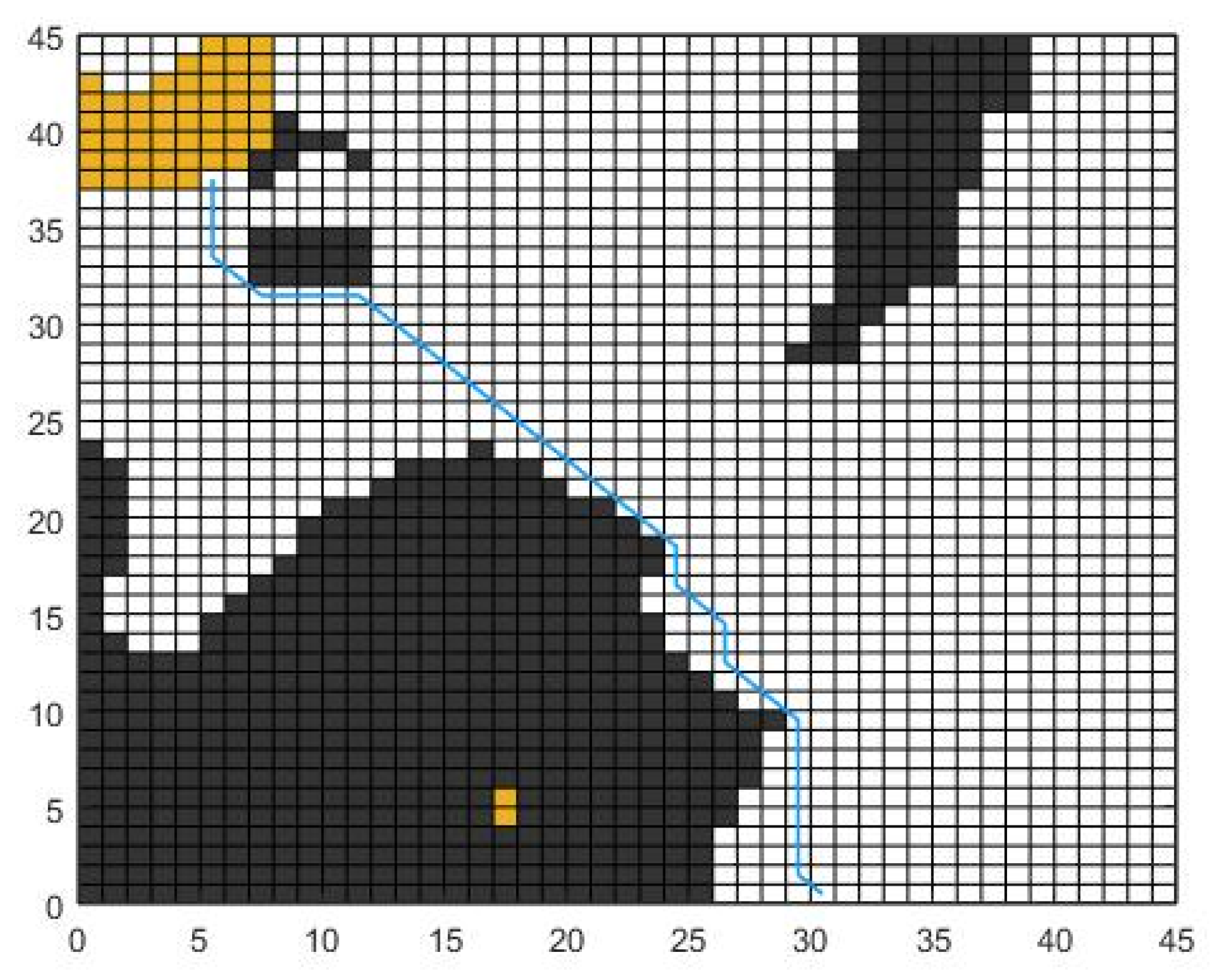
- To verify the effectiveness of this algorithm, we designed three shipping companies with different navigation strategies. The IMACO algorithm was used to simulate the optimal routes of different shipping companies. In addition, the voyage distance, total time and fuel consumption cost of the three shipping companies were calculated respectively.
- To verify the advancement of this algorithm, we compared the result of the SACO algorithm with the result of Company A (under the IMACO algorithm). Two indicators of wind speed and wave height in the SACO algorithm were selected to construct the marine risk environment of ships, the wind speed is limited to 12 m/s, and the wave height is limited to 2 m.
3.2. Experimental Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- United Nations Conference on Trade and Development. Review of Maritime Transport 2021; United Nations: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, H.; Geng, J.; Hu, W.; Zhang, Z.; Zhang, G. Multi-Objective Weather Routing Algorithm for Ships Based on Hybrid Particle Swarm Optimization. J. Ocean. Univ. China 2022, 21, 28–38. [Google Scholar] [CrossRef]
- Lindstad, H.; Asbjørnslett, B.E.; Jullumstrø, E. Assessment of profit, cost and emissions by varying speed as a function of sea conditions and freight market. Transp. Res. Part D Transp. Environ. 2013, 19, 5–12. [Google Scholar] [CrossRef]
- Liu, X.; Li, Y.; Zhang, J.; Zheng, J.; Yang, C. Self-adaptive dynamic obstacle avoidance and path planning for USV under complex maritime environment. IEEE Access 2019, 7, 114945–114954. [Google Scholar] [CrossRef]
- Park, J.; Kim, N. Two-phase approach to optimal weather routing using geometric programming. J. Mar. Sci. Technol. 2015, 20, 679–688. [Google Scholar] [CrossRef]
- Mannarini, G.; Coppini, G.; Oddo, P.; Pinardi, N. A prototype of ship routing decision support system for an operational oceanographic service. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2013, 7, 53–59. [Google Scholar] [CrossRef]
- Zhou, P.; Wang, H.; Guan, Z. Ship weather routing based on grid system and modified genetic algorithm. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 647–652. [Google Scholar] [CrossRef]
- Hanssen, G.L.; James, R.W. Optimum ship routing. J. Navig. 1960, 13, 253–272. [Google Scholar] [CrossRef]
- Hagiwara, H. Weather Routing of (Sail-Assisted) Motor Vessels. Ph.D. Thesis, Technical University of Delft, Delft, The Netherlands, 1989. [Google Scholar]
- Szlapczynska, J.; Smierzchalski, R. Adopted isochrone method improving ship safety in weather routing with evolutionary approach. Int. J. Reliab. Qual. Saf. Eng. 2007, 14, 635–645. [Google Scholar] [CrossRef]
- Roh, M.-I. Determination of an economical shipping route considering the effects of sea state for lower fuel consumption. Int. J. Nav. Archit. Ocean. Eng. 2013, 5, 246–262. [Google Scholar] [CrossRef] [Green Version]
- Bellman, R. On the theory of dynamic programming. Proc. Natl. Acad. Sci. USA 1952, 38, 716–719. [Google Scholar] [CrossRef]
- Zoppoli, R. Minimum-time routing as an N-stage decision process. J. Appl. Meteorol. 1972, 11, 429–435. [Google Scholar] [CrossRef]
- Barber, C.; Sen, P.; Downie, M. Parallel dynamic programming and ship voyage management. Concurr. Pract. Exp. 1994, 6, 673–696. [Google Scholar] [CrossRef]
- Shao, W.; Zhou, P.; Thong, S.K. Development of a novel forward dynamic programming method for weather routing. J. Mar. Sci. Technol. 2012, 17, 239–251. [Google Scholar] [CrossRef]
- Skoglund, L.; Kuttenkeuler, J.; Rosén, A.; Ovegård, E. A comparative study of deterministic and ensemble weather forecasts for weather routing. J. Mar. Sci. Technol. 2015, 20, 429–441. [Google Scholar] [CrossRef]
- Prpić-Oršić, J.; Vettor, R.; Faltinsen, O.M.; Guedes Soares, C. The influence of route choice and operating conditions on fuel consumption and CO2 emission of ships. J. Mar. Sci. Technol. 2016, 21, 434–457. [Google Scholar] [CrossRef]
- Kuhlemann, S.; Tierney, K. A genetic algorithm for finding realistic sea routes considering the weather. J. Heuristics 2020, 26, 801–825. [Google Scholar] [CrossRef]
- Du, W.; Li, Y.; Zhang, G.; Wang, C.; Chen, P.; Qiao, J. Estimation of ship routes considering weather and constraints. Ocean. Eng. 2021, 228, 108695. [Google Scholar] [CrossRef]
- Borén, C.; Castells-Sanabra, M.; Grifoll, M. Ship emissions reduction using weather ship routing optimisation. Proc. Inst. Mech. Eng. 2022. [Google Scholar] [CrossRef]
- Pan, C.; Zhang, Z.; Sun, W.; Shi, J.; Wang, H. Development of ship weather routing system with higher accuracy using SPSS and an improved genetic algorithm. J. Mar. Sci. Technol. 2021, 26, 1324–1339. [Google Scholar] [CrossRef]
- Shin, Y.W.; Abebe, M.; Noh, Y.; Lee, S.; Lee, I.; Kim, D.; Bae, J.; Kim, K.C. Near-optimal weather routing by using improved A* algorithm. Appl. Sci. 2020, 10, 6010. [Google Scholar] [CrossRef]
- Howden, W.E. The sofa problem. Comput. J. 1968, 11, 299–301. [Google Scholar] [CrossRef]
- Liu, F. Study on the Ship’s Loss-Speed in Wind and Waves. J. Dalian Marit. Univ. 1992, 4, 347–351. (In Chinese) [Google Scholar]
- Zhang, G.; Wang, H.; Zhao, W.; Guan, Z.; Li, P. Application of improved multi-objective ant colony optimization algorithm in ship weather routing. J. Ocean. Univ. China 2021, 20, 45–55. [Google Scholar] [CrossRef]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed optimization by ant colonies. In Proceedings of the first European Conference on Artificial Life, Paris, France, 11–13 December 1991; pp. 134–142. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dead Weight Ton (t) | The Speed of the Ship (kts) | The Power of the Main Engine (kW) | The Fuel Consumption Rate of the Ship (g/kWh) |
|---|---|---|---|
| 32,005 | 15 | 6480 | 159.4 |
| Parameter | Value |
|---|---|
| Number of iterations | 500 |
| Number of ants | 20 |
| The importance of pheromone () | 1 |
| The importance of heuristic factor () | 7 |
| Pheromone evaporation coefficient () | 0.3 |
| Pheromone increase intensity coefficient () | 1 |
| Example | Route Length (nm) | Voyage Time (h) | Fuel Consumption Cost (Hundred Dollars) |
|---|---|---|---|
| Company A | 1376.45 | 102.16 | 1145.25 |
| Company B | 1393.05 | 103.37 | 1158.68 |
| Company C | 1399.01 | 104.23 | 1167.82 |
| Contrast experiment | 1440.13 | 106.87 | 1196.40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Wu, L.; Zheng, J. Multi-Objective Weather Routing Algorithm for Ships: The Perspective of Shipping Company’s Navigation Strategy. J. Mar. Sci. Eng. 2022, 10, 1212. https://doi.org/10.3390/jmse10091212
Yang J, Wu L, Zheng J. Multi-Objective Weather Routing Algorithm for Ships: The Perspective of Shipping Company’s Navigation Strategy. Journal of Marine Science and Engineering. 2022; 10(9):1212. https://doi.org/10.3390/jmse10091212
Chicago/Turabian StyleYang, Jicheng, Letian Wu, and Jian Zheng. 2022. "Multi-Objective Weather Routing Algorithm for Ships: The Perspective of Shipping Company’s Navigation Strategy" Journal of Marine Science and Engineering 10, no. 9: 1212. https://doi.org/10.3390/jmse10091212