
Numerical Simulation Analysis of the Submarine Drilling-Rig Bit Flow-Noise Characteristics
Abstract
:1. Introduction
2. Theoretical and Simulation Models
2.1. Computational Theory
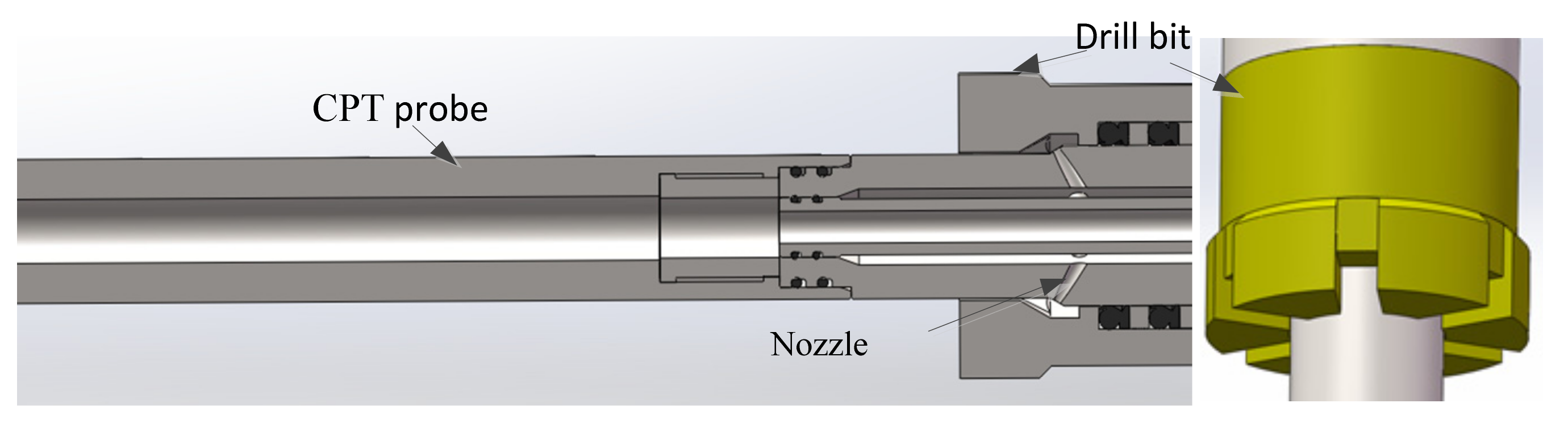
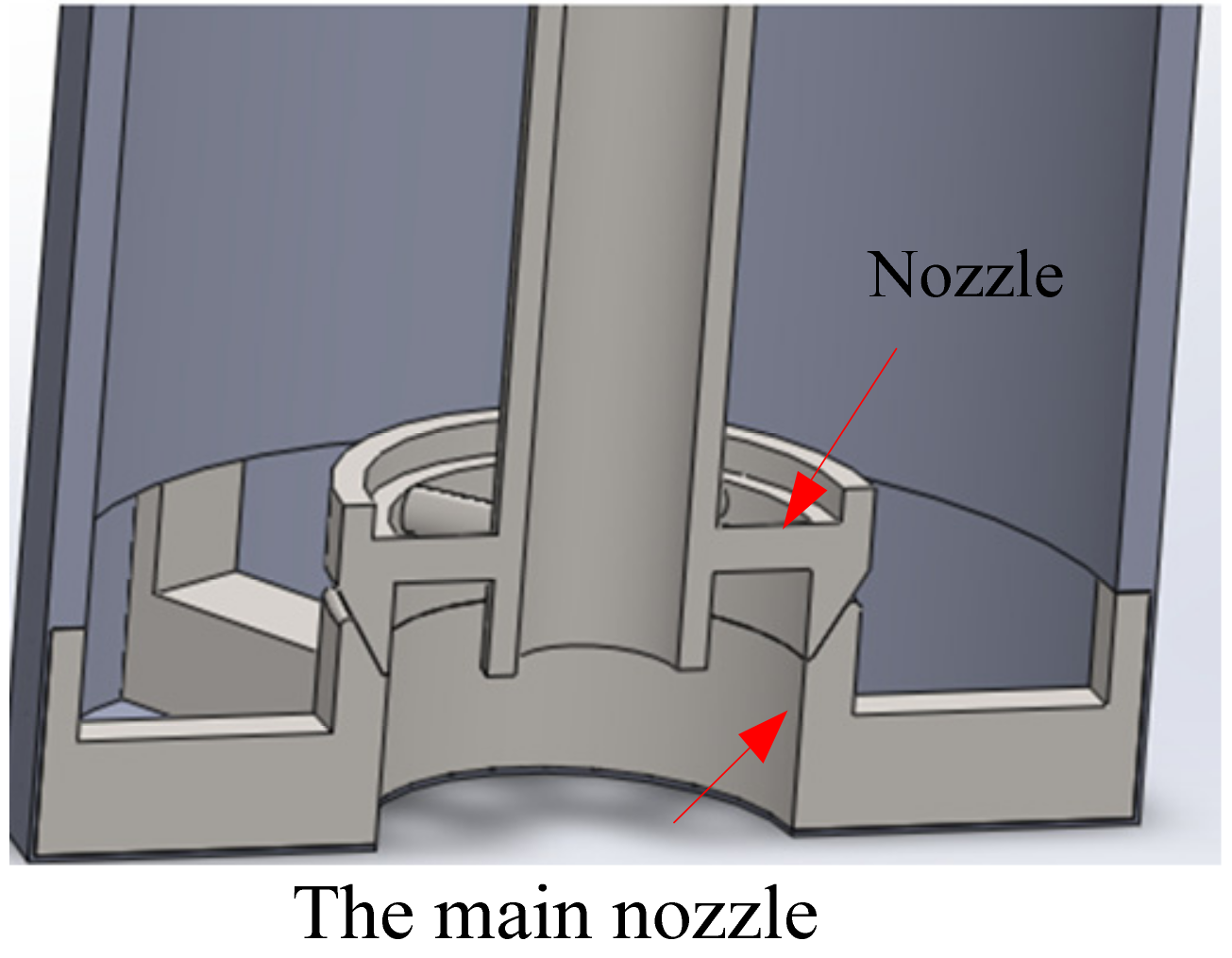
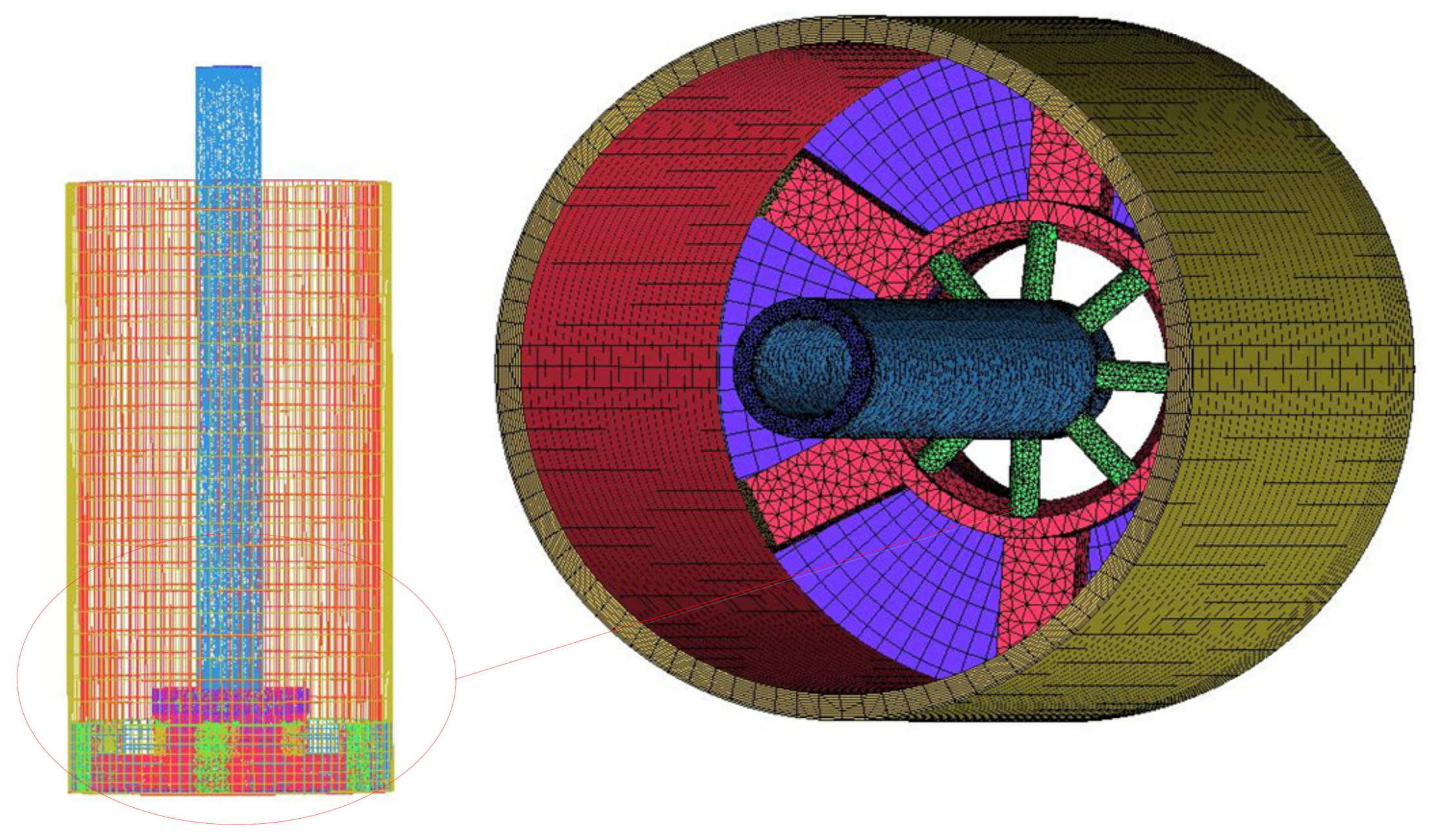
2.2. Analysis Model and Boundary Conditions
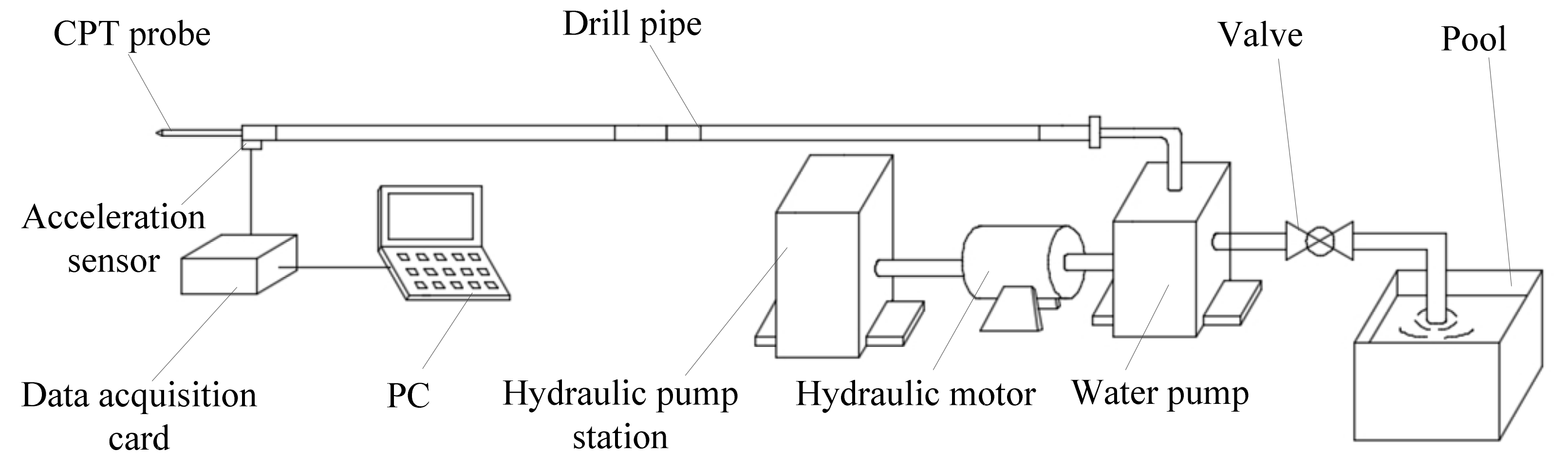
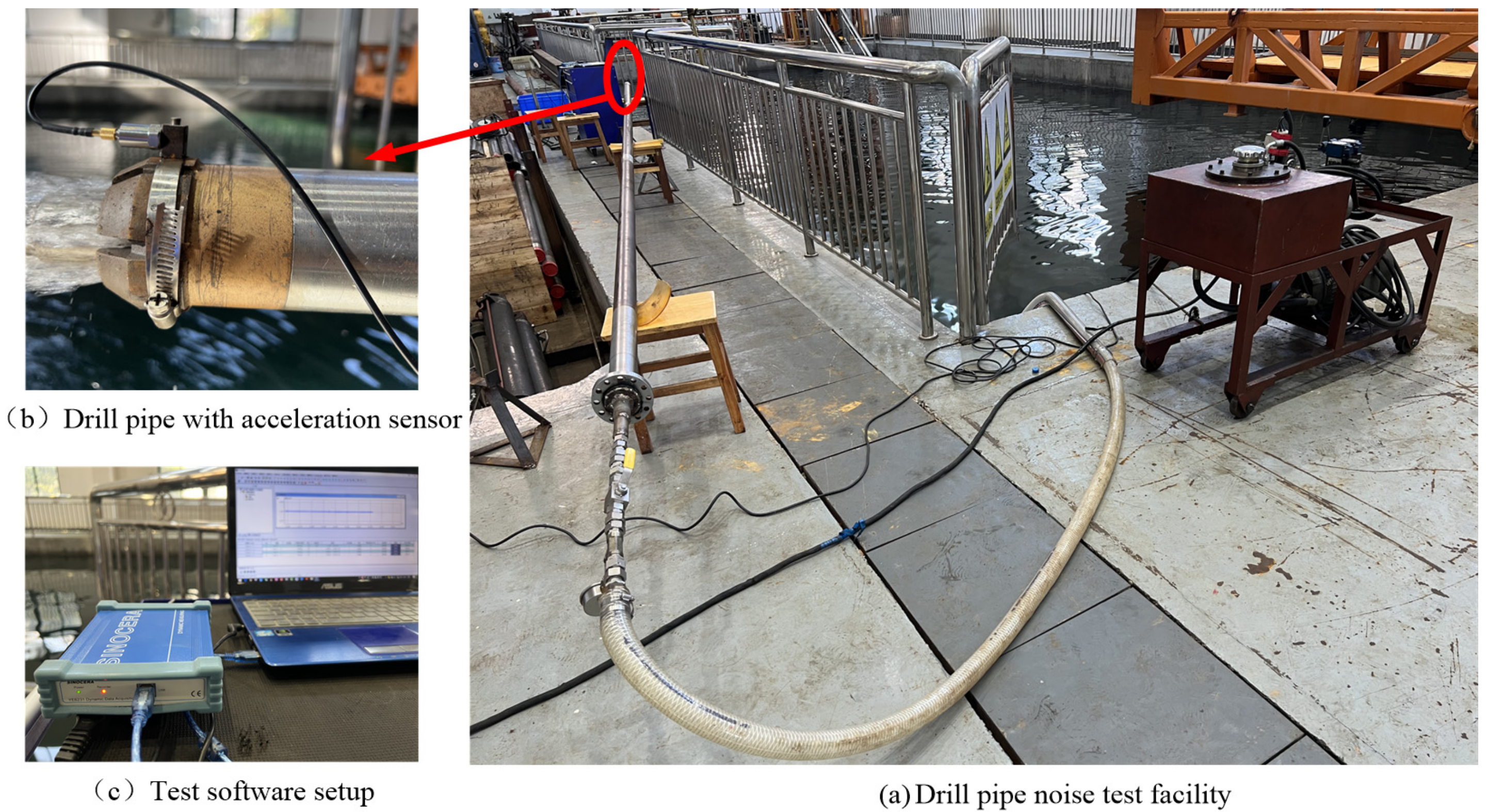
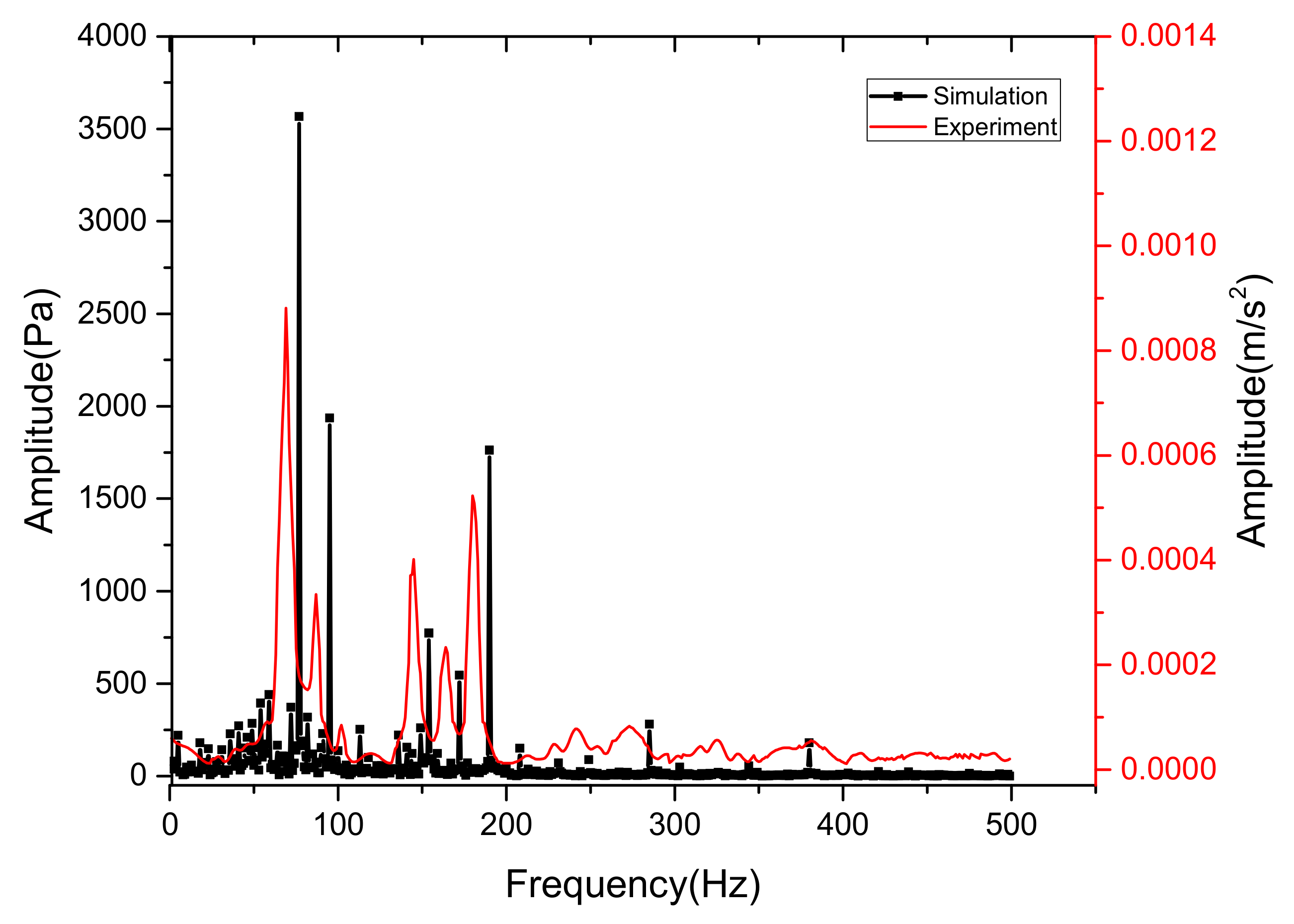
3. Experimental Verification
4. Discussion
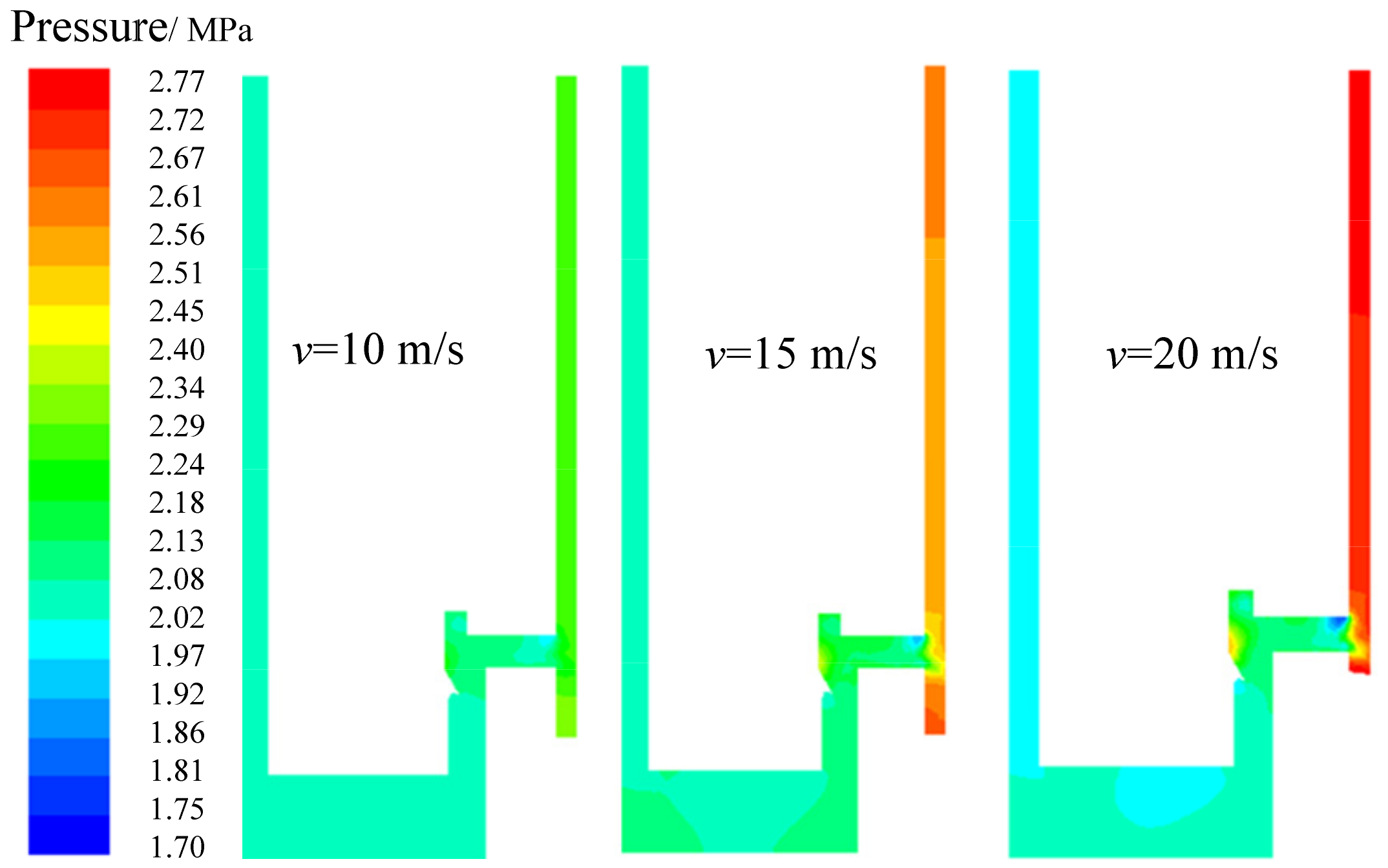
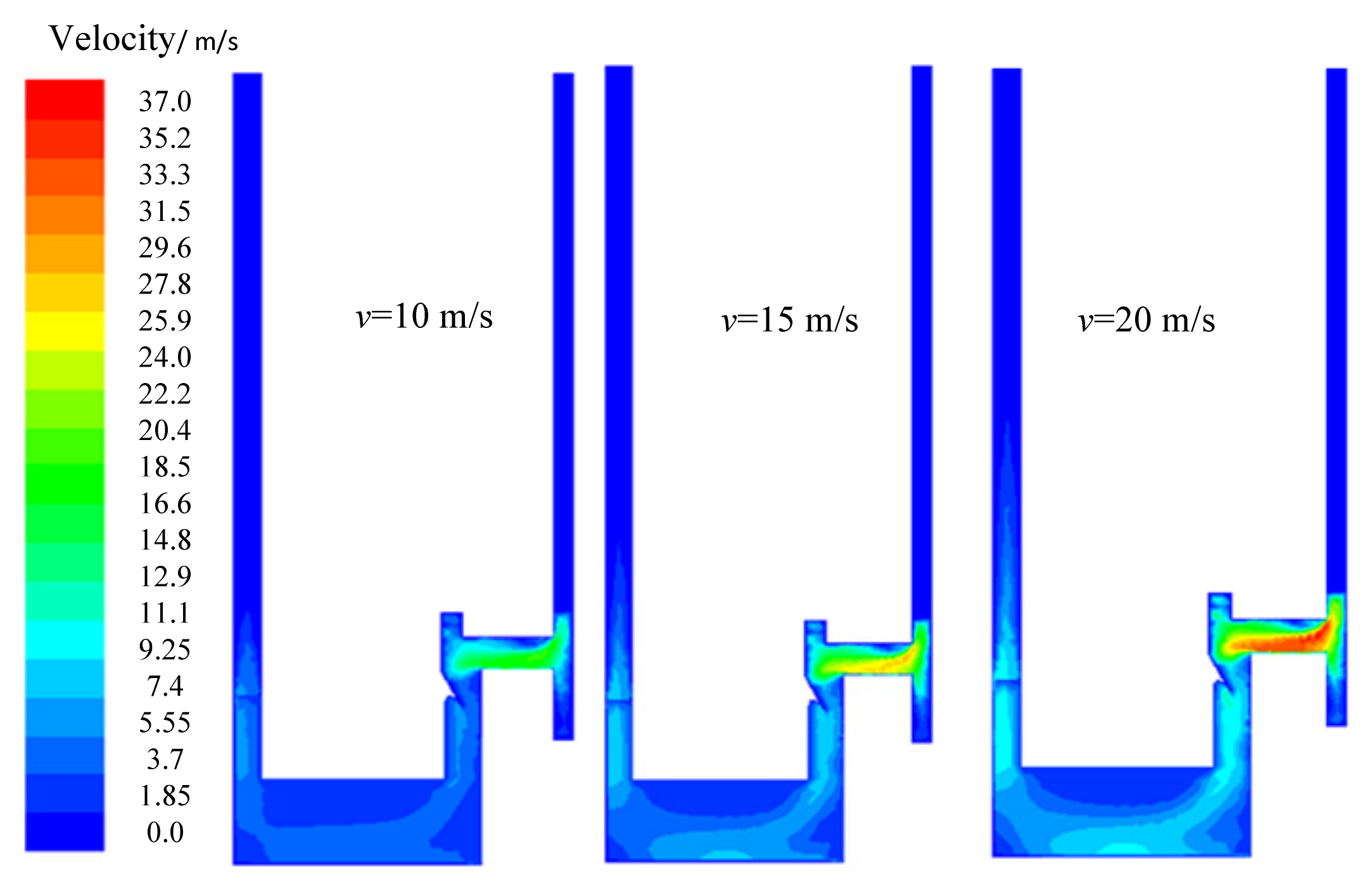
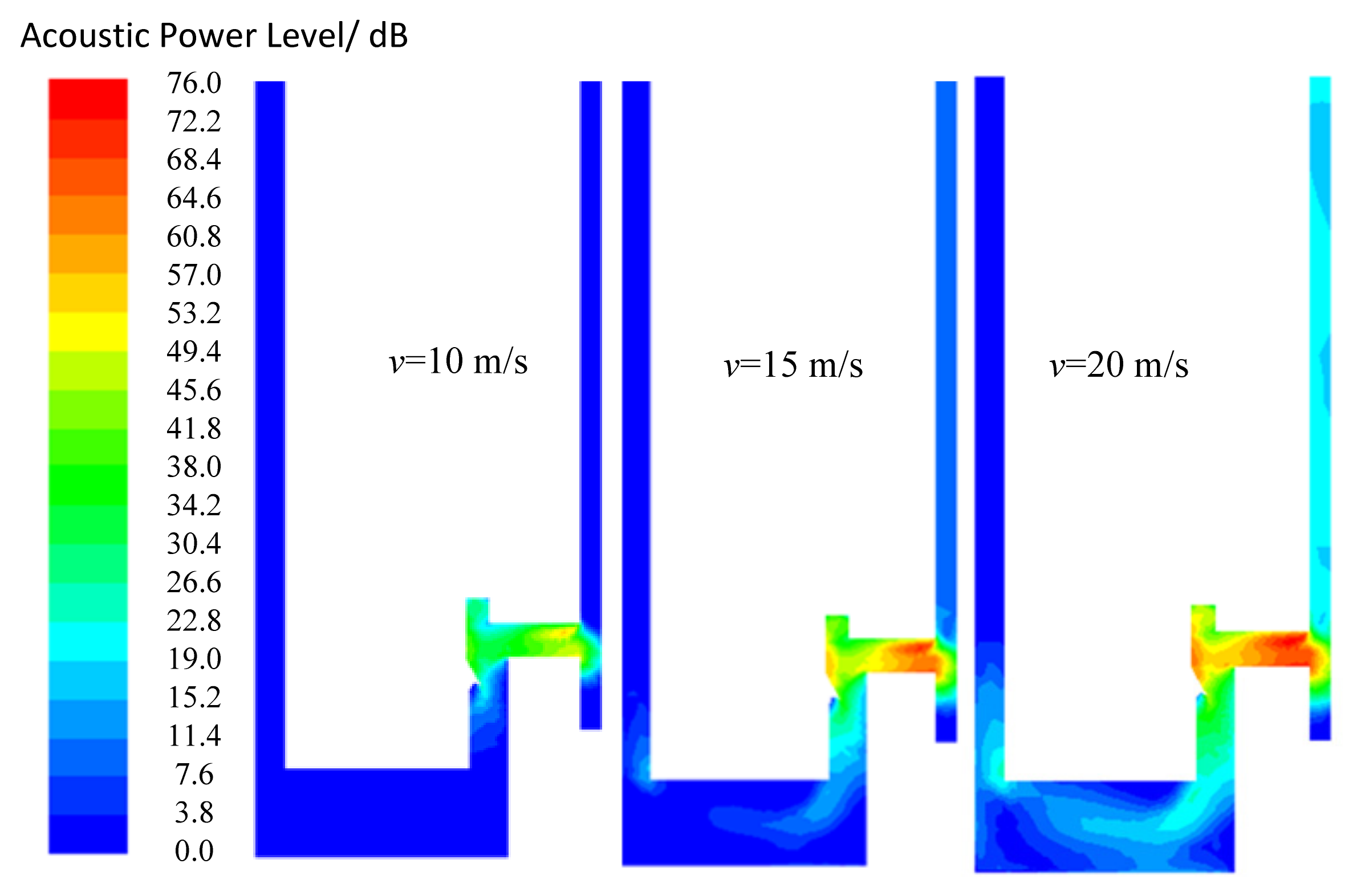
4.1. Influence of Flow Velocity on Flow-Field Characteristics
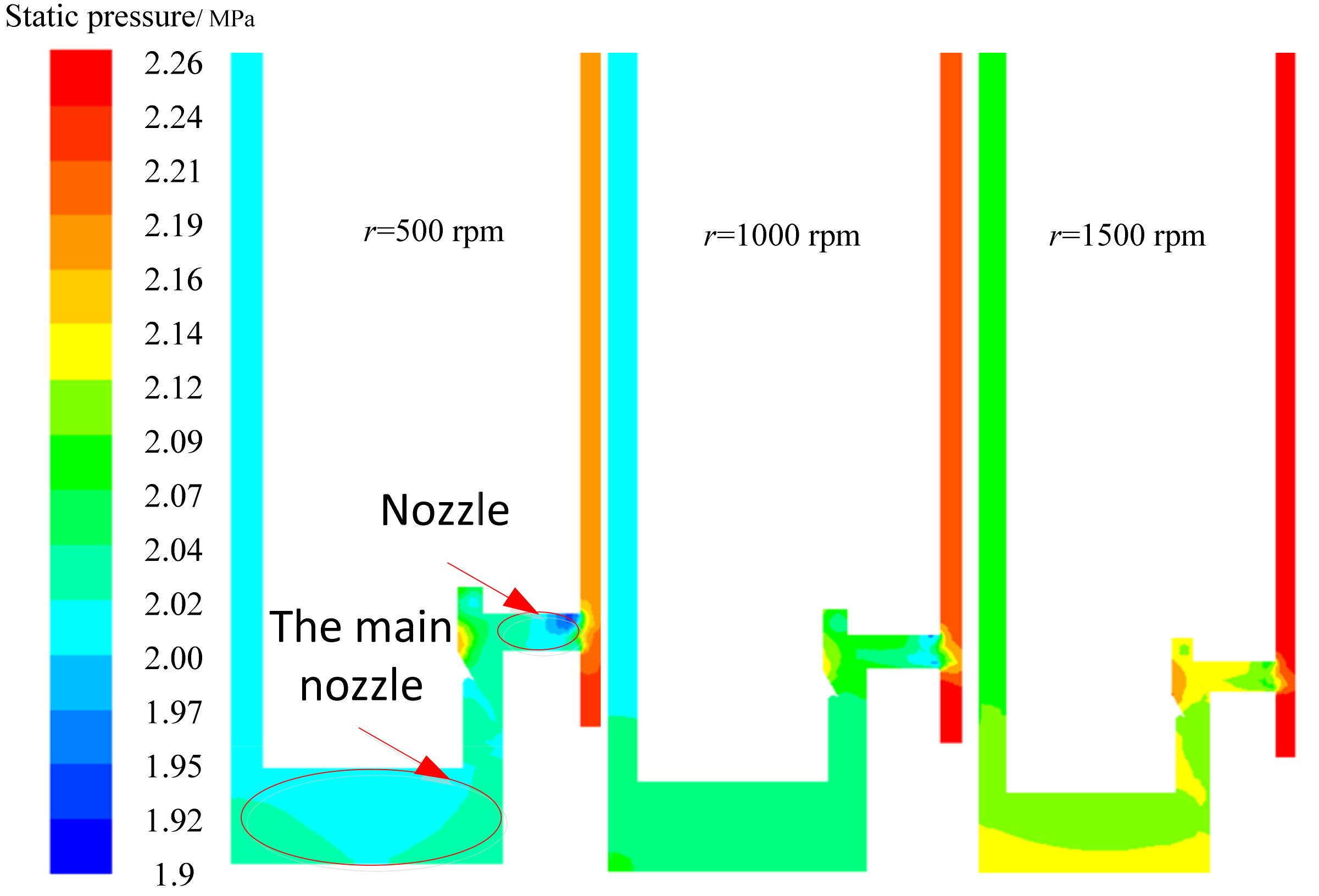
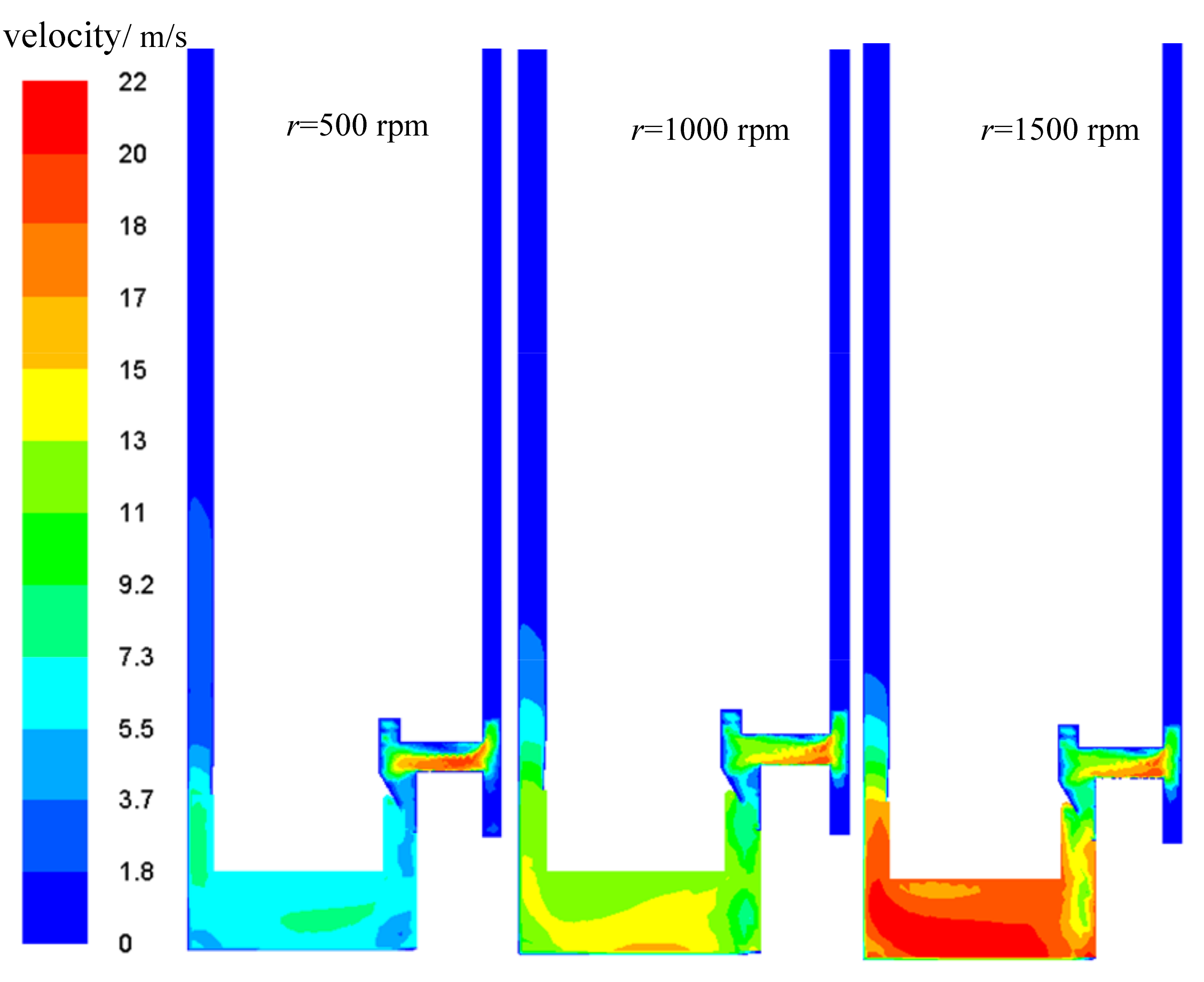
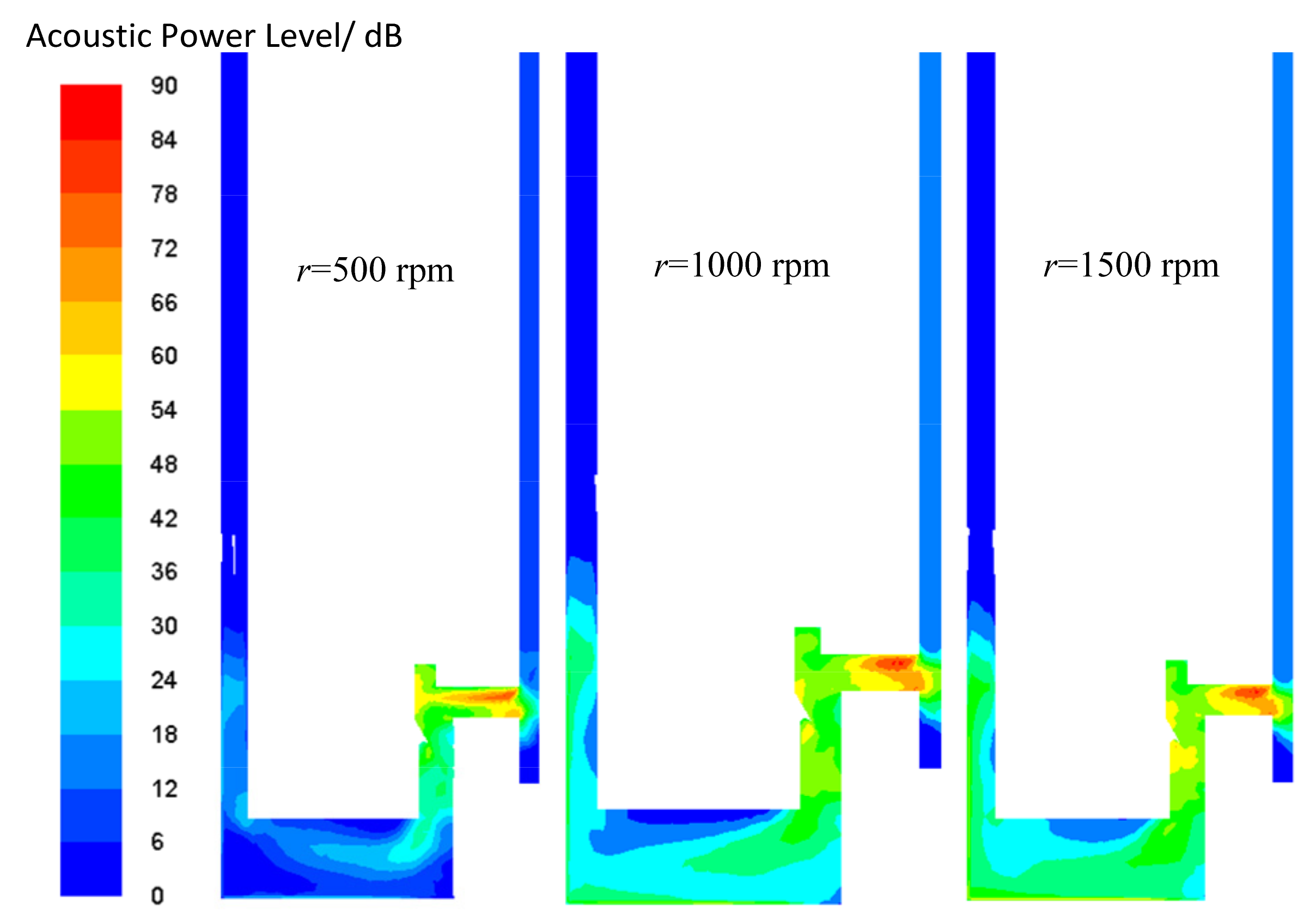
4.2. Influence of Rotational Speed on Flow-Field Characteristics
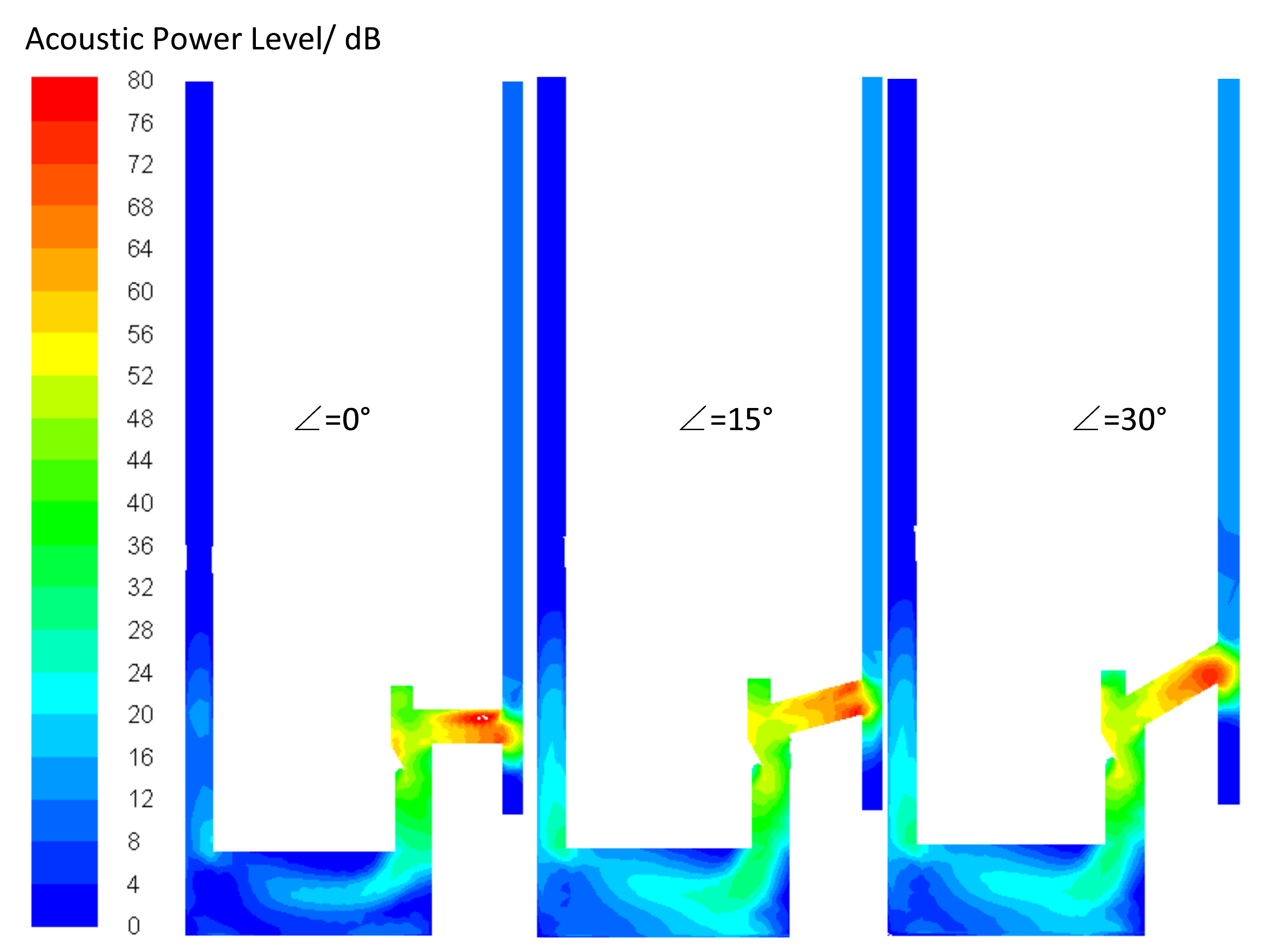
4.3. Influence of Bit Nozzle Inclination on Flow-Field Characteristics
4.4. Analysis of Frequency Spectrum Characteristics of Low Flow-Noise Bit Structure
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lijith, K.P.; Malagar, B.R.C.; Singh, D.N. A comprehensive review on the geomechanical properties of gas hydrate bearing sediments. Mar. Pet. Geol. 2019, 104, 270–285. [Google Scholar] [CrossRef]
- Wei, J.; Fang, Y.; Lu, H.; Lu, H. Distribution and characteristics of natural gas hydrates in the Shenhu Sea Area, South China Sea. Mar. Pet. Geol. 2018, 98, 622–628. [Google Scholar] [CrossRef]
- Mario, M.; Vahid, G. An explicit coupled MPM formulation to simulate penetration problems in soils using quadrilateral elements. Comput. Geotech. 2022, 145, 104697. [Google Scholar]
- Campo, B.; Bruno, L.; Amorosi, A. Sedimentary facies characterization through CPTU profiles: An effective tool for subsurface investigation of modern alluvial and coastal plains. Sedimentology 2023, 70, 1302–1327. [Google Scholar] [CrossRef]
- Yi, X.L.; Tan, S.A.; Phoon, K.K. Friction angle and overconsolidation ratio of soft clays from cone penetration test. Eng. Geol. 2020, 274, 105730. [Google Scholar]
- Zheng, G.; Yu, W. CPT-based probabilistic liquefaction assessment considering soil spatial variability, interpolation uncertainty, and model uncertainty. Comput. Geotech. 2022, 141, 104504. [Google Scholar]
- Lunne, T.; Robertson, P.K.; Powell, J.J. Cone-penetration testing in geotechnical practice. Soil Mech. Found. Eng. 2009, 46, 237. [Google Scholar] [CrossRef]
- Wang, Z. The Chinese CPT and the prospect of penetration tests. Chin. J. Geotech. Eng. 2000, 22, 517–522. [Google Scholar]
- Li, S.; Dai, X.; Zhou, Y.; Jiang, B. Study on the penetration mechanism of Seabed CPT and Downhole CPT. Ocean Eng. 2016, 34, 35–40. [Google Scholar]
- Lunne, T. The CPT in offshore soil investigations—A historic perspective. Proc. CPT 2010, 10, 71–113. [Google Scholar]
- Yost, K.; Green, R.A.; Upadhyaya, S. Assessment of the efficacies of correction procedures for multiple thin layer effects on Cone Penetration Tests. Soil Dyn. Earthq. Eng. 2021, 144, 106677. [Google Scholar] [CrossRef]
- Guo, S.; Liu, R. Application of cone penetration test in offshore engineering. Chin. J. Geotech. Eng. 2015, 37, 207–211. [Google Scholar]
- Liu, D.S.; Jin, Y.P.; Wan, B.Y. Review and Development Trends of Deep-sea Mineral Resource Core Sampling Technology and Equipment. China Mech. Eng. 2014, 23, 3255–3265. [Google Scholar]
- Martins, J.B.; Correia, A.G.; Teixeira, A.; Mendes, P.M. Wireless in geotechnical engineering: A CPTUwl prototype. In Proceedings of the Fourth International Conference on Site Characterization, ISC’4, Pernambuco, Brazil, 18–21 September 2012; Volume 4. [Google Scholar]
- Zhang, X.; Lin, C.M. Use of the Cone Penetration Testing (CPT) method to interpret late Quaternary tide-dominated successions: A case study from the eastern China coastal plain. Cont. Shelf Res. 2018, 161, 49–57. [Google Scholar] [CrossRef]
- Qi, C.; Xia, L.; Zhang, W. Underwater short distance magnetic communication based on coupling coils in sealed metal bin. Int. J. Comput. Sci. Math. 2023, 17, 138–151. [Google Scholar] [CrossRef]
- Dsxpd, A.; Zwl, A.; Bo, C. Bearing capacity analysis of offshore pipe piles with CPTs by considering uncertainly—ScienceDirect. Comput. Geotech. 2020, 126, 103731. [Google Scholar]
- Peng, F.F.; Wang, J.L.; Wan, B.Y. Optimization of key mechanism of the wire-line coring drilling tool for submarine hard rock. Geol. Explor. 2020, 65, 154–162. [Google Scholar]
- Wang, Y.L.; Wang, Z.D.; Song, Z.F. Review of vibration and noise control technology in piping system for submarines. Ship Sci. Technol. 2008, 30, 34–38. [Google Scholar]
- Lighthill, M.J. On Sound Generated Aerodynamically. II. Turbulence as a Source of Sound. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1954, 222, 1–32. [Google Scholar]
- Xie, Z.; Shen, N.; Ge, J. Analysis of the flow noises of the nuclear main pump caused by the high temperature liquid Sodium in the two-circuit main loop liquid Sodium pump system. Ann. Nucl. Energy 2020, 145, 107550. [Google Scholar] [CrossRef]
- Zhao, W.; Jiang, Z.; Wang, X. Characteristics of fine-scale turbulence noise evaluated by modal analysis. Appl. Acoust. 2020, 160, 107145. [Google Scholar] [CrossRef]
- Li, Q.; Song, J.P.; Shang, D.J. Experimental Investigation of Acoustic Propagation Characteristics in a Fluid-Filled Polyethylene Pipeline. Appl. Sci. 2019, 9, 213. [Google Scholar] [CrossRef]
- Cheng, G.F.; Zhang, W.P.; Wu, G.W. Radiation Characteristics of Noise from Inlet and Outlet of Seawater Piping System. Ship Eng. 2005, 27, 55–58. [Google Scholar]
- Wu, Z.B.; Wang, Y.Y.; Pan, Y.J. Comparative Study on Simulation of Rotating Flow Field and Non-rotating Flow Field of PDC Bit. Oil Field Equip. 2020, 49, 10–15. [Google Scholar]
- Yan, Y.; Guan, Z.C.; Yan, W.J. Study of Dual-Stage PDC Bit Flow Field Based on Discrete Phase Model. China Pet. Mach. 2019, 487, 5–13. [Google Scholar]
- Huang, J.Y.; Zhang, K.; Li, H.Y. Numerical simulation of aerodynamic noise and noise reduction of range hood. Appl. Acoust. 2021, 175, 107806. [Google Scholar] [CrossRef]
- Chen, G.; Liang, X.F.; Zhou, D. Numerical study of flow and noise predictions for tandem cylinders using incompressible improved delayed detached eddy simulation combined with acoustic perturbation equations. Ocean Eng. 2021, 224, 108740. [Google Scholar] [CrossRef]
- Stuermer, A.; Yin, J.; Akkermans, R. Progress in aerodynamic and aeroacoustic integration of CROR propulsion systems. Aeronaut. J. 2014, 118, 1137–1158. [Google Scholar] [CrossRef]
- Stuermer, A.W.; Akkermans, R.A. Validation of aerodynamic and aeroacoustic simulations of contra-rotating open rotors at low-speed flight conditions. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014; Volume 3133. [Google Scholar]
- Wang, Y.; Mikkola, T.; Hirdaris, S. A fast and storage-saving method for direct volumetric integration of FWH acoustic analogy. Ocean Eng. 2022, 261, 112087. [Google Scholar] [CrossRef]
- Sezen, S.; Atlar, M. Numerical investigation into the effects of tip vortex cavitation on propeller underwater radiated noise (URN) using a hybrid CFD method. Ocean Eng. 2022, 266, 112658. [Google Scholar] [CrossRef]
- Stuermer, A.; Akkermans, R.A.D. Multidisciplinary analysis of CROR propulsion systems: DLR activities in the JTI SFWA project. CEAS Aeronaut. J. 2014, 5, 265–277. [Google Scholar] [CrossRef]
- Giauque, A.; Ortun, B.; Rodriguez, B.; Caruelle, B. Numerical error analysis with application to transonic propeller aeroacoustics. Comput. Fluids 2012, 69, 20–34. [Google Scholar] [CrossRef]
- Proudman, I. The Generation of Noise by Isotropic Turbulence. Proc. R. Soc. A 1952, 1116, 119–132. [Google Scholar]
- Lilley, G.M. The Radiated Noise from Isotropic Turbulence Revisited; NASA Contract Report 93-75; NASA Langley Research Center: Hampton, VA, USA, 1993.
- Sarkar, S.; Hussaini, M.Y. Computation of the Sound Generated by Isotropic Turbulence; NASA Contract Report 93–74; NASA Langley Research Center: Hampton, VA, USA, 1993.
- Visconti, G.; Ruggieri, P. Turbulence. In Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Orlandi, P.; Fatica, M. Direct simulations of turbulent flow in a pipe rotating about its axis. J. Fluid Mech. 1997, 343, 43–72. [Google Scholar] [CrossRef]
- Liu, N.S.; Lu, X.Y.; Zhuang, L.X. Effect of rotation on near-wall turbulence characteristics and flow field structure. Sci. China Ser. G Phys. Mech. Astron. 2005, 1, 87–108. [Google Scholar]
- Imao, S.; Itoh, M.; Harada, T. Turbulent characteristics of the flow in an axially rotating pipe. Int. J. Heat Fluid Flow 1996, 17, 444–451. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | Parameter |
|---|---|
| Reference sensitivity | 10.6 mV/m·s−2 |
| Frequency range | 1–10,000 Hz |
| Maximum permissible acceleration | 5 × 102 m·s−2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Xi, Y.; Wan, B.; Tian, X.; Quan, W. Numerical Simulation Analysis of the Submarine Drilling-Rig Bit Flow-Noise Characteristics. J. Mar. Sci. Eng. 2023, 11, 1845. https://doi.org/10.3390/jmse11101845
Xu J, Xi Y, Wan B, Tian X, Quan W. Numerical Simulation Analysis of the Submarine Drilling-Rig Bit Flow-Noise Characteristics. Journal of Marine Science and Engineering. 2023; 11(10):1845. https://doi.org/10.3390/jmse11101845
Chicago/Turabian StyleXu, Jingwei, Yi Xi, Buyan Wan, Xianglin Tian, and Weicai Quan. 2023. "Numerical Simulation Analysis of the Submarine Drilling-Rig Bit Flow-Noise Characteristics" Journal of Marine Science and Engineering 11, no. 10: 1845. https://doi.org/10.3390/jmse11101845