

Trajectory Tracking Nonlinear Controller for Underactuated Underwater Vehicles Based on Velocity Transformation


Abstract
1. Introduction
- (1)
- The proposal of a control algorithm for tracking the desired trajectory in the variables obtained after the velocity transformation resulting from the decomposition of the inertia matrix. The original dynamic model applies to a fully asymmetric vehicle (in both axes), and after decomposition, the inertial couplings are included in the quantities occurring in the controller.
- (2)
- The tracking controller for an underactuated vehicle moving horizontally is based on a combination of sliding mode control, backstepping techniques, and the IQV and provides robustness against disturbances.
- (3)
- A mathematical representation of the conditions of the algorithm and an indication of some of the information that can be obtained using the IQV while tracking the desired trajectory.
- (4)
- Simulation studies were carried out on models of real vehicles and the possible values of force and torque achieved by them, which distinguishes the proposed test from others that do not take into account the technical capabilities, for example [29,36,48,49], as well as the values of the speeds achieved.
2. Mathematical Model of Vehicle Moving in Horizontal Plane
2.1. Equations of Motion
2.2. Inertial-Quasi-Velocity-Based Equations
2.3. Assumptions
- (A1)
- The motion of the underwater vehicle in the roll, pitch, and heave directions is neglected.
- (A2)
- The vehicle has a neutral buoyancy, and the origin of the body-fixed coordinate is at the geometric center.
- (A3)
- The vehicle is asymmetrical with respect to two planes, which means that the distance of the center of mass from the geometric center is nonzero in the x and y directions.
- (A4)
- In the dynamic equations of the vehicle, the disturbance forces (external, but also internal due to the inaccuracy of the model) are taken into account.
- (A5)
- The reference signals and states are bounded: , , , , , , , , , , .
- (A6)
- The composite disturbances , , and are bounded, i.e., , , and . This means that the perturbations of the model parameters are also bounded.
- (A7)
- The thrust saturation effect is not serious, which makes it possible to assume that and are bounded, i.e., and . The assumptions about the control signals’ boundedness were used for marine vehicles, e.g., in [53,54]. This is allowed when the control input values exceed the thruster limit only sometimes [55]. The operating conditions and desired trajectories can ultimately be selected to meet the above condition.
- (A8)
- The yaw angle is time varying and bounded and fulfills the condition or, more practically, .
3. Robust Adaptive Trajectory Tracking Controller
3.1. Kinematic Relationships
3.2. Backstepping- and Sliding-Mode-Combination-Based Control Scheme Design
4. Simulation Results
4.1. Vehicle Models and Test Conditions
- (1)
- Mean integrated absolute error (MIA), i.e., where ;
- (2)
- Mean integrated absolute control (MIAC), i.e., ;
- (3)
- (4)
- Mean kinetic energy (MKE) , (K denotes the kinetic energy);
- (5)
- Mean quasi-velocity (MQV) , representing the velocity deformation arising from the dynamics;
- (6)
- Mean quasi-velocity error (MQVE) , representing the velocity error deformation arising from the dynamics;
- (7)
- Couplings evaluation index (CEI) for a vehicle.
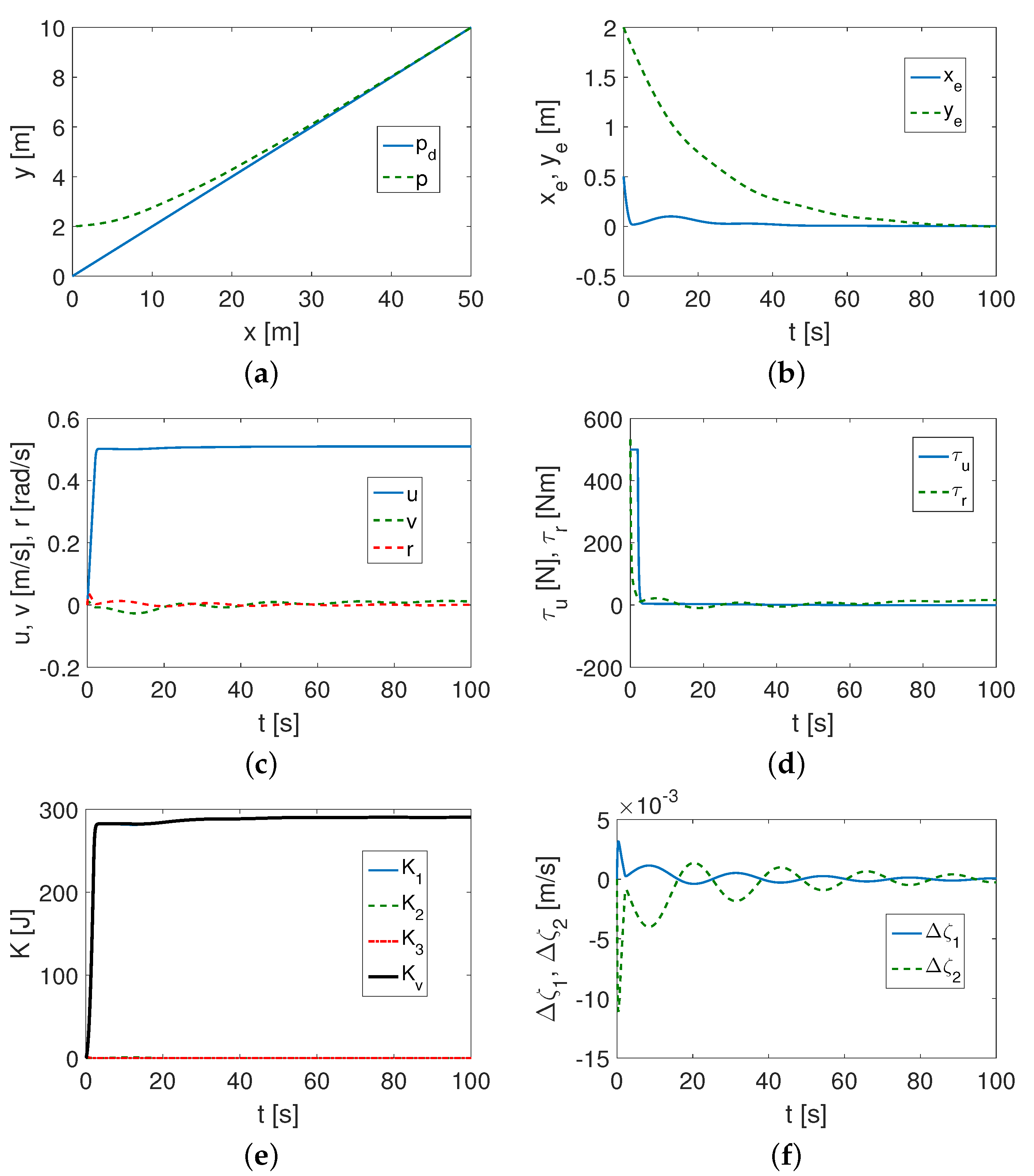
4.1.1. SIRENE Vehicle Test
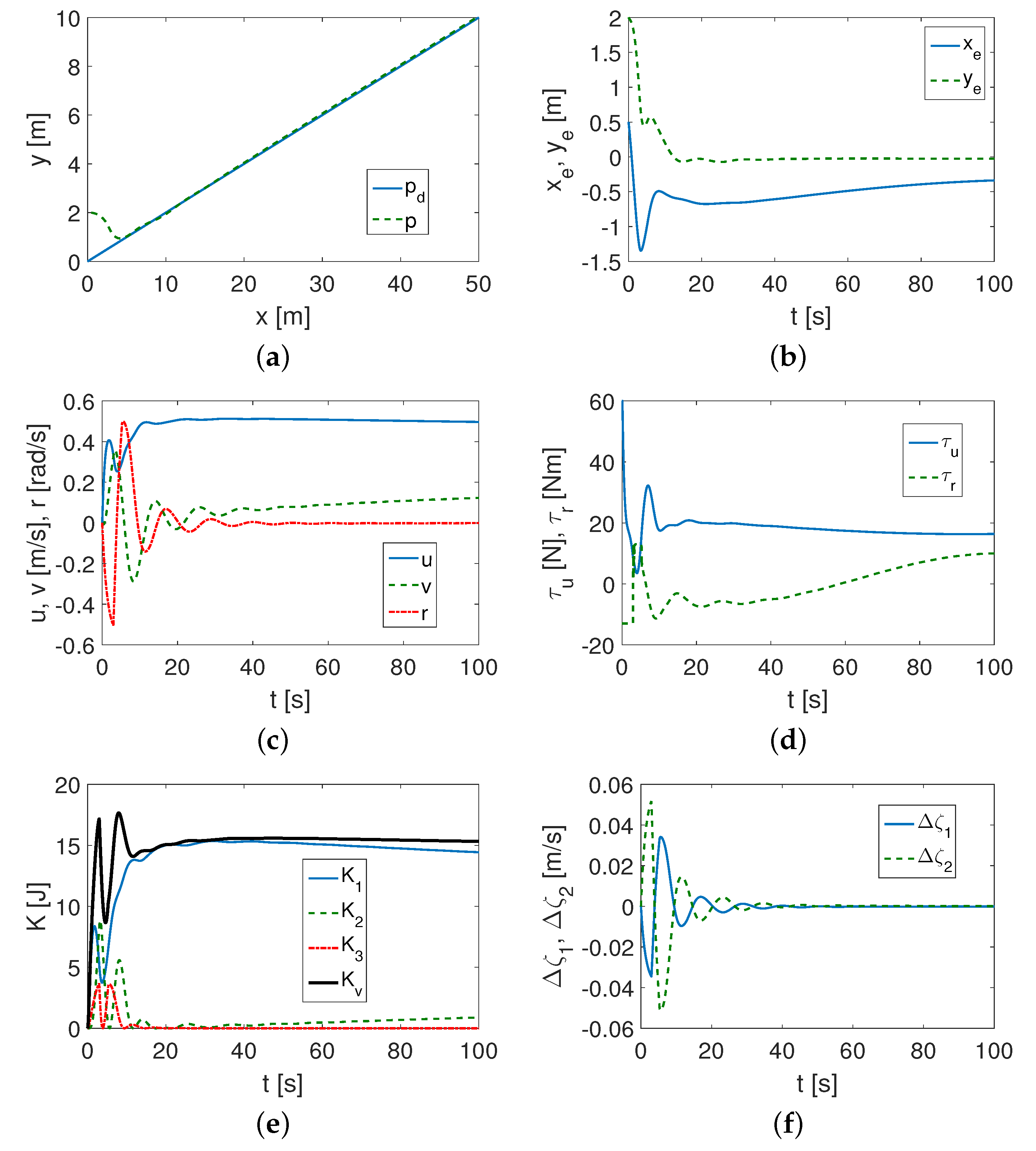
4.1.2. CETUS II Vehicle Test
4.2. Discussion of Results
- (1)
- It was found that the performance of the proposed control algorithm was affected by both the vehicle dynamics and the selection of the desired trajectory.
- (2)
- If the vehicle had a large mass and the motors provided large force and force torque values (SIRENE), then the proposed algorithm was effective even in a limited time, and the performance was better than for a light vehicle (CETUS II) with small propulsion capabilities (force and force torques obtained).
- (3)
- All controller gain values were relevant to the tracking task to achieve acceptable performance. The most sensitive appeared to be and , which were responsible for reducing the position error values. However, other gains, i.e., , , and , also affected the control performance. Controller tuning was more effective for the SIRENE vehicle.
- (4)
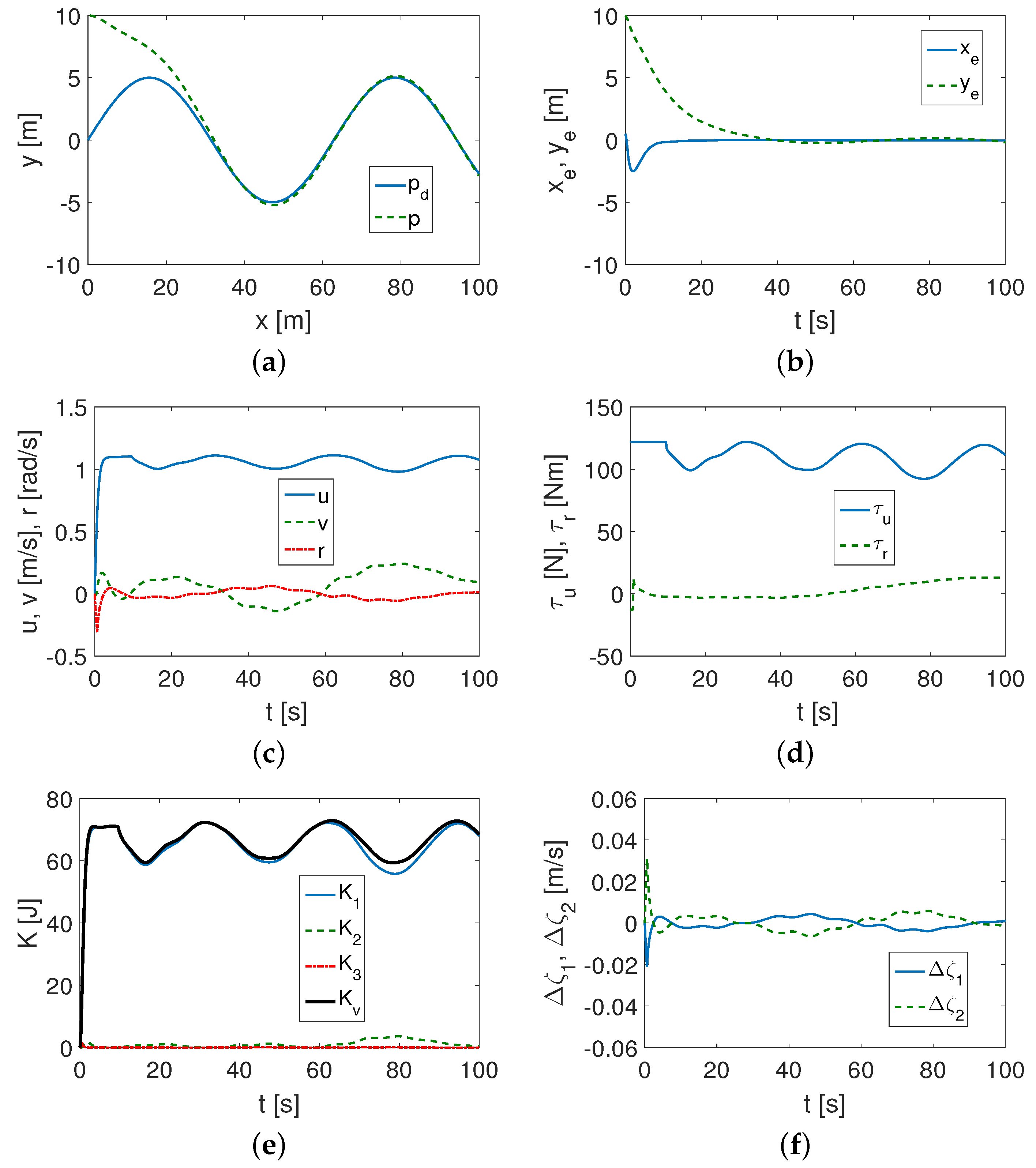
- The test showed that the controller’s performance and tracking accuracy depended on the vehicle dynamics, the vehicle’s propulsion capabilities, and the selection of the desired trajectory. Furthermore, the control signals had the largest values for the sine trajectory.
- (5)
- It turned out that, in some cases, the algorithm was somehow robust to changes in the appropriately selected set of control gains, that is similar gain values could be applied to different trajectories.
- (6)
- The simulation studies demonstrated the suitability of the proposed algorithm both for control applications and for testing the dynamics of marine vehicles. Using the proposed control scheme, information was obtained that provided additional insight into the vehicle dynamics.
- (a)
- It was possible to analyze the kinetic energy corresponding to each IQV (and indirectly to velocity). The tests showed that the kinetic energy consumption depended not only on the parameters of the vehicle, but also on the trajectory to be followed. It turned out that the most kinetic energy was consumed by tracking a sine trajectory, and for other trajectories, it was much less.
- (b)
- The velocity deformation caused by the effect of vehicle asymmetry can be evaluated using indexes and .
- (c)
- It was feasible to estimate the couplings in the vehicle model using the index because it reflected the parameters concerning the asymmetry of the inertia matrix.
- (d)
- A conclusion about the convergence of the errors on the basis of the indexes alone (MIA, RMS) can be misleading because they do not take into account the run history of these quantities. It is only by combining the index values with the error history that the performance of the controller can be reasonably deduced.
- (e)
- The effort associated with the control signal had large values compared to the signal for the SIRENE vehicle, while for the CETUS vehicle, the main effort came from the signal. This may be the reason that the control accuracy for the SIRENE was better.
- The control scheme consisted of a kinematic algorithm and a dynamic algorithm. The use of each guaranteed only limited convergence to equilibrium. This caused position errors to add up and accuracy to seek some limit. While it can be reduced, it cannot be eliminated. This is due to the mathematical approach used.
- The dynamic and geometric parameters of the model had a significant impact on the performance of the controller. As a result, the force and torque had large values, especially when the vehicle started to move. In a real vehicle, such values may be impossible to achieve and, therefore, need to be limited to acceptable values (which is due to mechanical restrictions). This was performed in the conducted tests so that the realized trajectories did not exceed the values resulting from the drives of each tested vehicle, and at the same time, the conditions of the mathematical proof were met.
- The parameters of the kinematic controller and were sensitive to changes, and their increase led to oscillations; therefore, they must have limited values, which led to an increase in the time to achieve the desired trajectory. The selection of these gains is difficult because there is no side signal forcing. The changes in parameters relating to the dynamic part of the scheme , , and were also related to each other, which made their selection difficult (especially k4, because it relates to rotation and indirectly affects the lateral movement of the vehicle). In addition, some of the dynamic parameters affected changes in the desired virtual controls (i.e., and ).
- The performance of the controller was limited by the need to simultaneously meet the parameter selection conditions of the kinematic and dynamic controllers, as well as the requirements of the force and torque limitation.
- First, compared to control strategies based on a vehicle model with a diagonal inertia matrix (the assumption of full vehicle symmetry), the proposed algorithm is more general because it allows the use of a vehicle model that is asymmetric in two planes. This distinguishes the presented algorithm from others that are suitable for vehicle models without inertial coupling, e.g., [8,9,24,58], and additionally oriented toward improving performance against a known control scheme [26]. Even controllers suitable for an asymmetric model [31,33,36] cannot be considered suitable for the general case (with full asymmetry).
- Second, the use of velocity transformation allowed the controller to apply dynamic equations with a diagonal inertia matrix. An important advantage is that the information contained in the original nonlinear model remains in the diagonalized equations, which makes it possible to incorporate them into the control algorithm.
- Third, using the offered control scheme, it is possible to estimate the effect of couplings during the realization of the trajectory tracking task, something that algorithms oriented only toward performance improvement do not provide. This property of the proposed algorithm gives the advantage that, without performing an experiment on a real vehicle, it is possible to determine whether the couplings are significant in the vehicle model or can be neglected.
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| DOF | degree of freedom |
| IQV | inertial quasi-velocity |
| M | vehicle inertia matrix |
| diagonal vehicle inertia matrix in terms of the IQV | |
| diagonal vehicle inertia matrix in terms of the IQV with constant elements | |
| velocity transformation matrix | |
| vector containing the inaccuracies of the velocity transformation matrix | |
| velocity transformation matrix with constant elements |
References
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Lefeber, E.; Pettersen, K.Y.; Nijmeijer, H. Tracking Control of an Underactuated Ship. IEEE Trans. Control. Syst. Technol. 2003, 11, 52–61. [Google Scholar] [CrossRef]
- Godhavn, J.M. Nonlinear tracking of underactuated surface vessels. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 11–13 December 1996; pp. 975–980. [Google Scholar]
- Repoulias, F.; Papadopoulos, E. Planar trajectory planning and tracking control design for underactuated AUVs. Ocean Eng. 2007, 34, 1650–1667. [Google Scholar] [CrossRef]
- Do, K.D. Robust adaptive tracking control of underactuated ODINs under stochastic sea loads. Robot. Auton. Syst. 2015, 72, 152–163. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Qiao, L.; Zhang, W. Robust adaptive trajectory tracking control of underactuated surface vessel in fields of marine practice. J. Mar. Sci. Technol. 2018, 23, 950–957. [Google Scholar] [CrossRef]
- Zhao, Y.; Sun, X.; Wang, G.; Fan, Y. Adaptive Backstepping Sliding Mode Tracking Control for Underactuated Unmanned Surface Vehicle With Disturbances and Input Saturation. IEEE Access 2021, 9, 1304–1312. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Trajectory tracking sliding mode control of underactuated AUVs. Nonlinear Dyn. 2016, 84, 1079–1091. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, B.; Liao, Y.; Wang, B. Finite-Time Trajectory Tracking Control for Uncertain Underactuated Marine Surface Vessels. IEEE Access 2019, 7, 102321–102330. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Sun, Y.; Chai, P.; Zhang, G.; Zhou, T.; Zheng, H. Sliding Mode Motion Control AUV Dual-Obs. Thruster Uncertainty. J. Mar. Sci. Eng. 2022, 10, 349. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- Vu, M.T.; Thanh, H.L.N.N.; Huynh, T.T.; Do, Q.T.; Do, T.D.; Hoang, Q.D.; Le, T.H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Tijjani, A.S.; Chemori, A.; Creuze, V. Robust Adaptive Tracking Control of Underwater Vehicles: Design, Stability Analysis, and Experiments. IEEE/ASME Trans. Mechatr. 2021, 26, 897–907. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mobayen, S.; Din, S.U.; Asad, J.H.; Fekih, A.; Assawinchaichote, W.; Vu, M.T. Design of a Non-Singular Adaptive Integral-Type Finite Time Tracking Control for Nonlinear Systems With External Disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Osler, S.; Sands, T. Controlling Remotely Operated Vehicles with Deterministic Artificial Intelligence. Appl. Sci. 2022, 12, 2810. [Google Scholar] [CrossRef]
- Sands, T. Development of Deterministic Artificial Intelligence for Unmanned Underwater Vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Shah, R.; Sands, T. Comparing Methods of DC Motor Control for UUVs. Appl. Sci. 2021, 11, 4972. [Google Scholar] [CrossRef]
- Sands, T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 2144. [Google Scholar] [CrossRef]
- Koo, S.M.; Travis, H.; Sands, T. Impacts of Discretization and Numerical Propagation on the Ability to Follow Challenging Square Wave Commands. J. Mar. Sci. Eng. 2022, 10, 419. [Google Scholar] [CrossRef]
- Zhai, H.; Sands, T. Controlling Chaos in Van Der Pol Dynamics Using Signal-Encoded Deep Learning. Mathematics 2022, 10, 453. [Google Scholar] [CrossRef]
- Zhai, H.; Sands, T. Comparison of Deep Learning and Deterministic Algorithms for Control Modeling. Sensors 2022, 22, 6362. [Google Scholar] [CrossRef] [PubMed]
- Pan, C.Z.; Lai, X.Z.; Wang, S.X.; Wu, M. An efficient neural network approach to tracking control of an autonomous surface vehicle with unknown dynamics. Expert Syst. Appl. 2013, 40, 1629–1635. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, C.; Wei, Y.; Wang, J. Neural-Based Command Filtered Backstepping Control for Trajectory Tracking of Underactuated Autonomous Surface Vehicles. IEEE Access 2020, 8, 42482–42490. [Google Scholar] [CrossRef]
- Zhang, L.J.; Qi, X.; Pang, Y.J. Adaptive output feedback control based on DRFNN for AUV. Ocean Eng. 2009, 36, 716–722. [Google Scholar] [CrossRef]
- Zhu, G.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M. Event-Triggered Adaptive Neural Fault-Tolerant Control of Underactuated MSVs With Input Saturation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7045–7057. [Google Scholar] [CrossRef]
- Duan, K.; Fong, S.; Chen, P. Fuzzy observer-based tracking control of an underactuated underwater vehicle with linear velocity estimation. IET Control. Theory Appl. 2020, 14, 584–593. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Sun, Y.; Lewis, F.L. Robust adaptive trajectory tracking control of underactuated autonomous underwater vehicles with prescribed performance. Int. J. Robust Nonlinear Control 2019, 29, 4629–4643. [Google Scholar] [CrossRef]
- Dong, Z.; Wan, L.; Liu, T.; Zeng, J. Horizontal-plane Trajectory-tracking Control of an Underactuated Unmanned Marine Vehicle in the Presence of Ocean Currents. Int. J. Adv. Robot. Syst. 2016, 13, 63634. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y. Further results on global stabilisation and tracking control for underactuated surface vessels with non-diagonal inertia and damping matrices. Int. J. Control. 2015, 88, 1679–1692. [Google Scholar] [CrossRef]
- Wang, C.; Xie, S.; Chen, H.; Peng, Y.; Zhang, D. A decoupling controller by hierarchical backstepping method for straight-line tracking of unmanned surface vehicle. Syst. Sci. Control. Eng. 2019, 7, 379–388. [Google Scholar] [CrossRef]
- Wang, N.; Xie, G.; Pan, X.; Su, S.F. Full-State Regulation Control of Asymmetric Underactuated Surface Vehicles. IEEE Trans. Ind. Electron. 2019, 66, 8741–8750. [Google Scholar] [CrossRef]
- Chen, L.; Cui, R.; Yang, C.; Yan, W. Adaptive Neural Network Control of Underactuated Surface Vessels with Guaranteed Transient Performance: Theory and Experimental Results. IEEE Trans. Ind. Electron. 2020, 67, 4024–4035. [Google Scholar] [CrossRef]
- Park, B.S. Neural Network-Based Tracking Control of Underactuated Autonomous Underwater Vehicles With Model Uncertainties. J. Dyn. Syst. Meas. Control. Trans. ASME 2015, 137, 021004. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S.; Lin, H. Transverse function control with prescribed performance guarantees for underactuated marine surface vehicles. Int. J. Robust Nonlinear Control 2019, 29, 1577–1596. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, G.; Fan, Y.; Mu, D.; Sun, X. Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation. Appl. Sci. 2019, 9, 1240. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Nersesov, S.; Clayton, G. Trajectory Tracking Control of Planar Underactuated Vehicles. IEEE Trans. Autom. Control. 2017, 62, 1959–1965. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, J.Y. Robust trajectory tracking with adjustable performance of underactuated surface vessels via quantized state feedback. Ocean Eng. 2022, 246, 110475. [Google Scholar] [CrossRef]
- Jia, Z.; Hu, Z.; Zhang, W. Adaptive output-feedback control with prescribed performance for trajectory tracking of underactuated surface vessels. ISA Trans. 2019, 95, 18–26. [Google Scholar] [CrossRef]
- Paliotta, C.; Lefeber, E.; Pettersen, K.Y.; Pinto, J.; Costa, M.; de Figueiredo Borges de Sousa, J.T. Trajectory Tracking and Path Following for Underactuated Marine Vehicles. IEEE Trans. Control. Syst. Technol. 2019, 27, 1423–1437. [Google Scholar] [CrossRef]
- Wang, N.; Su, S.F. Finite-Time Unknown Observer-Based Interactive Trajectory Tracking Control of Asymmetric Underactuated Surface Vehicles. IEEE Trans. Control. Syst. Technol. 2014, 29, 794–803. [Google Scholar] [CrossRef]
- Herman, P. Numerical Test of Several Controllers for Underactuated Underwater Vehicles. Appl. Sci. 2020, 10, 8292. [Google Scholar] [CrossRef]
- Kozlowski, K.; Herman, P. Control of Robot Manipulators in Terms of Quasi-Velocities. J. Intell. Robot. Syst. 2008, 53, 205–221. [Google Scholar] [CrossRef]
- Sinclair, A.J.; Hurtado, J.E.; Junkins, J.L. Linear Feedback Controls using Quasi Velocities. J. Guid. Control. Dyn. 2006, 29, 1309–1314. [Google Scholar] [CrossRef]
- Herman, P. Application of nonlinear controller for dynamics evaluation of underwater vehicles. Ocean Eng. 2019, 179, 59–66. [Google Scholar] [CrossRef]
- Herman, P. Vehicle Dynamics Study Based on Nonlinear Controllers Conclusions and Perspectives. In Inertial Quasi-Velocity Based Controllers for a Class of Vehicles; Springer Tracts in Mechanical Engineering; Springer: Cham, Switzerland, 2022. [Google Scholar] [CrossRef]
- Li, S.; Wan, X.; Zhang, L. Finite-Time Output Feedback Tracking Control for Autonomous Underwater Vehicles. IEEE J. Ocean. Eng. 2015, 40, 727–751. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley and Sons: Chichester, UK, 1994. [Google Scholar]
- Loduha, T.A.; Ravani, B. On First-Order Decoupling of Equations of Motion for Constrained Dynamical Systems. Trans. ASME J. Appl. Mech. 1995, 62, 216–222. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.T.; Lee, S.D.; Choi, H.S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Han, Q.L. Path-Following Control of Autonomous Underwater Vehicles Subject to Velocity and Input Constraints via Neurodynamic Optimization. IEEE Trans. Ind. Electron. 2019, 66, 8724–8732. [Google Scholar] [CrossRef]
- Yu, H.; Guo, C.; Yan, Z. Globally finite-time stable three-dimensional trajectory-tracking control of underactuated UUVs. Ocean Eng. 2019, 189, 106329. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for UUVs With Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean. Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Fierro, R.; Lewis, F.L. Control of a nonholonomic mobile robot: Backsteping kinematics into dynamics. In Proceedings of the 34th IEEE conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; pp. 3805–3810. [Google Scholar]
- Fierro, R.; Lewis, F.L. Control of a Nonholonomic Mobile Robot: Backsteping Kinematics into Dynamics. J. Robot. Syst. 1997, 14, 149–163. [Google Scholar] [CrossRef]
- Xu, J.; Wang, M.; Qiao, L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles. Ocean Eng. 2015, 105, 54–63. [Google Scholar] [CrossRef]
- Marczak, A. Software: Robust Adaptive Trajectory Tracking Control of Underactuated Surface Vessel in Fields of Marine Practice. Unpublished project. Poznan University of Technology, Poznań, Poland, 2022. [Google Scholar]
- Batista, P.; Silvestre, C.; Oliveira, P. A two-step control approach for docking of autonomous underwater vehicles. Int. J. Robust Nonlinear Control 2015, 25, 1528–1547. [Google Scholar] [CrossRef]
- Silvestre, C.; Aguiar, A.; Oliveira, P.; Pascoal, A. Control of the SIRENE underwater shuttle: System design and tests at sea. In Proceedings of the 17th International Conference on Offshore Mechanics and Arctic Engineering, Lisbon, Portugal, 5–9 July 1998. [Google Scholar]
- Barisic, M.; Vasilijevic, A.; Nad, D. Sigma-Point Unscented Kalman Filter Used For AUV Navigation. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1365–1372. [Google Scholar]
- Djapic, V. Unifying Behavior Based Control Design and Hybrid Stability Theory for AUV Application. Ph.D. Thesis, University of California, Riverside, CA, USA, 2009. [Google Scholar]








| SIRENE | CETUS II | ||
|---|---|---|---|
| Symbol | Value | Value | Unit |
| 2234.5 | 117.02 | kg | |
| 2234.5 | 117.02 | kg | |
| 2000 | 30.7391 | kg m | |
| 0 | 0 | kg/s | |
| 346 | 25.6701 | kg/s | |
| 1427.2 | 15.525 | kg m/s | |
| 35.4090 | 105.16 | kg/m | |
| 667.5552 | 70.1851 | kg/m | |
| 26036 | 0.20 | kg m |
| SIRENE | CETUS II | ||||||
|---|---|---|---|---|---|---|---|
| Index | Sine t. | Linear t. | Circle t. | Sine t. | Linear t. | Circle t. | |
| MIA | 1.0393 | 0.0267 | 0.5562 | 0.1394 | 0.5334 | 0.4463 | |
| 0.6591 | 0.4005 | 0.1612 | 1.1292 | 0.1120 | 0.1435 | ||
| MIAC | 74.539 | 12.498 | 35.537 | 110.29 | 18.238 | 17.822 | |
| 156.02 | 10.326 | 204.72 | 5.2947 | 5.8960 | 5.3220 | ||
| RMS | 2.5771 | 0.6379 | 0.9426 | 2.4545 | 0.6439 | 0.7073 | |
| MKE | 1280.8 | 283.80 | 306.07 | 66.103 | 15.106 | 15.603 | |
| MQV | 1.2499 | 0.5144 | 0.7179 | 1.2000 | 0.6266 | 0.7191 | |
| MQVE | 0.0188 | 0.0013 | 0.0259 | 0.0051 | 0.0070 | 0.0108 | |
| CEI | 1.3258 | 1.3258 | 1.3258 | 1.1232 | 1.1232 | 1.1232 |
| SIRENE | CETUS II | ||||||
|---|---|---|---|---|---|---|---|
| Index | Sine t. | Linear t. | Circle t. | Sine t. | Linear t. | Circle t. | |
| MIA | 100% | 100% | 100% | 10.0% | 1998% | 80.2% | |
| 100% | 100% | 100% | 171% | 28.0% | 89.0% | ||
| MIAC | 59.6% | 100% | 284% | 605% | 100% | 97.7% | |
| 1511% | 100% | 1983% | 89.8% | 100% | 90.3% | ||
| RMS | 100% | 100% | 100% | 95.2% | 101% | 75.0% | |
| MKE | 451% | 100% | 108% | 476% | 100% | 103% | |
| MQV | 100% | 100% | 100% | 96.0% | 122% | 100% | |
| MQVE | 100% | 100% | 100% | 27.1% | 538% | 41.7% | |
| CEI | 100% | 100% | 100% | 84.7% | 84.7% | 84.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herman, P. Trajectory Tracking Nonlinear Controller for Underactuated Underwater Vehicles Based on Velocity Transformation. J. Mar. Sci. Eng. 2023, 11, 509. https://doi.org/10.3390/jmse11030509
Herman P. Trajectory Tracking Nonlinear Controller for Underactuated Underwater Vehicles Based on Velocity Transformation. Journal of Marine Science and Engineering. 2023; 11(3):509. https://doi.org/10.3390/jmse11030509
Chicago/Turabian StyleHerman, Przemyslaw. 2023. "Trajectory Tracking Nonlinear Controller for Underactuated Underwater Vehicles Based on Velocity Transformation" Journal of Marine Science and Engineering 11, no. 3: 509. https://doi.org/10.3390/jmse11030509
APA StyleHerman, P. (2023). Trajectory Tracking Nonlinear Controller for Underactuated Underwater Vehicles Based on Velocity Transformation. Journal of Marine Science and Engineering, 11(3), 509. https://doi.org/10.3390/jmse11030509