Abstract
In recent years, as intelligent ship-navigation technology has advanced, the challenge of accurately modeling and predicting the dynamic environment and motion status of ships has emerged as a prominent area of research. In response to the diverse time scales required for the prediction of ship motion, various methods for modeling ship navigation environments, ship motion, and ship traffic flow have been explored and analyzed. Additionally, these motion-prediction methods are applied for motion control, collision-avoidance planning, and route optimization. Key issues are summarized regarding ship-motion prediction, including online modeling of motion models, real ship validation, and consistency in modeling, optimization, and control. Future technology trends are predicted in mechanism-data fusion modeling, large-scale model, multi-objective motion prediction, etc.
1. Introduction
As the size and number of ships increase, the maritime navigation environment and scenarios become increasingly complex, which poses new challenges to maritime safety. Empowered by the integration of cutting-edge technologies such as artificial intelligence (AI), machine learning, and big data, the modern ship is poised for a transformative leap in operational efficiency and decision-making capabilities [,]. Autonomous ships represent the pinnacle of maritime automation, operating with minimal or no human intervention. The coexistence and mutual influence of intelligent ships and traditional ships are expected to persist over the long term. Abnormal ship behaviors will increase the risks of collisions, groundings, and reef encounters. Predicting ship behavior through the prediction of the ship-navigation trajectory will effectively mitigate these navigation risks [,,,]. According to statistics from the International Maritime Organization (IMO), approximately 80–85% of accidents that occurred in the past two decades were attributed to human faults [,]. By implementing ship automation or assisted navigation systems, the probability of ship accidents can be effectively reduced. Accurate prediction of ship motion not only enhances the intelligence of maritime navigation but also decreases risks during navigation and energy consumption, thereby reducing pollution and greenhouse gas emissions during voyages [,,].
The prediction of ship motion represents the temporal aspect of a ship Guidance, Navigation, and Control (GNC) system []. Ship motion prediction can be divided into different time scales during specific applications in the maritime domain. The long-term prediction is used for traffic-flow management or long-voyage trajectory prediction, short-term prediction is used for collision avoidance or path planning, and extreme short-term prediction is used for ship motion control. Ship motion is influenced by both the maritime environment and ship maneuvering. ship-motion prediction models at different time scales can be established based on either mechanics or data. These models provide the foundation for collision-avoidance path planning, path tracking control, traffic flow simulation, and the optimization of long-distance ship routes. They are integral to the realization of intelligent navigation. Currently, various researchers are conducting studies on the short-term prediction of ship motion, collision-avoidance trajectory prediction and planning, and long-term trajectory prediction [,,].
To study motion prediction systematically for intelligent navigation, we provide an overview and analysis of the methods and applications of motion prediction across different time scales. In previous studies [,,], motion prediction is taken only as a part of route planning, motion control, or traffic simulation individually. It is essential to consider the overall motion-prediction models, algorithms, and systems for different time scales. Many people are trying to solve this problem in terms of different aspects, and many models and applications have been presented for the motion prediction and control [,]. Since different types of the weather conditions will affect the ship’s navigating state and safety, the influence of the environment must be considered, and the high-precision weather forecast can provide effective data support [,,]. Meanwhile, with the development of new technologies, data collection with high-precision sensors, the state of ship motion, and environmental condition can be measured with high frequency, which will promote motion prediction [,,,]. More and more new technologies will be used in the shipping industry, and it is important to analyze the new direction for trends in technological development.
This review investigates the landscape of ship-motion prediction algorithms and their application in intelligent navigation. This paper is organized as follows: Section 2 systematically analyzes existing algorithms and research advancements through a thorough literature review. Section 3 delves into the environmental factors influencing motion prediction, exploring diverse methods for their modeling and forecasting. Section 4 introduces a range of motion models and prediction algorithms suitable for various time scales. Section 5 demonstrates the practical potential of motion prediction through representative applications. In Section 6, we critically analyze key challenges and emerging research trends identified in the reviewed literature, and Section 7 provides insights for future development. Section 8 concludes this paper.
2. Research Progress on Motion Prediction Based on the Literature Review
In order to analyze the current status and trends in research on ship-motion prediction, this paper conducts a search in the Web of Science (WOS) for literature on methods for ship-motion prediction from the past decade. Keywords from the relevant literature are analyzed using visualization tools to identify research hotpots and trends. Figure 1 depicts a keyword cluster map for the prediction of ship motion. The upper part of the figure illustrates keyword hotspots, while the lower part displays the evolution of research topics over time. Through this literature review, it is evident that earlier research tended to utilize standard ship models, employing methods such as Computational Fluid Dynamics (CFD) or empirical formulas. These methods use data from towing tank experiments with scaled ship models to describe mathematical models of ship motion. Mathematical models are used to characterize the nonlinear motion of ships, taking ship maneuverability and hydrodynamics into account. Research on ship maneuverability, navigation resistance, and hydrodynamics is often combined with the ship’s own control and seaworthiness. Over time, as computational resources advance, and with the accumulation of experimental data and developments in research methods, recent studies have increasingly incorporated ship Automatic Identification System (AIS) data. Artificial intelligence, machine learning, and deep learning techniques are utilized to predict ship motion and trajectories, which contribute to enhancing ship navigation safety and collision avoidance applications.
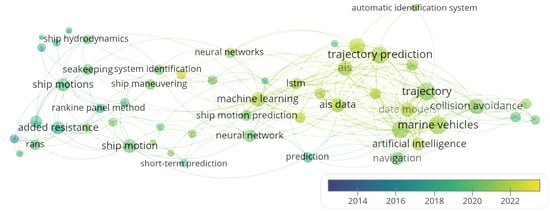
Figure 1.
Knowledge graph for the prediction of ship motion.
As shown in Figure 2, the ship’s navigation and motion control system represent a complex framework. This includes the ship-motion model and control algorithms. Moreover, it requires the utilization of perception, positioning, and observation systems to determine the ship’s real position relative to other ships. Based on the navigational environment of the ship’s destination port and sailing area, a safe and rational sailing route is charted. Then, this route, in turn, integrates with the ship’s power control system for the ship-motion control by a seafarer or an autonomous system [].
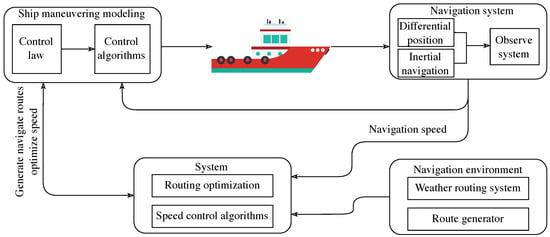
Figure 2.
Intelligent ship navigation environment perception, motion models, and control systems.
Figure 3 depicts the process of ship-motion prediction. Before the ship embarks on a voyage, route planners use weather forecasts for the ship’s navigational area, environmental constraints such as navigational facilities within the waterways, and the ship state model to establish the ship’s navigation trajectory. During the voyage, the ship receives information from other ships through AIS, including their navigation trajectories and departure ports. Ship operators, relying on their navigation experience or traffic-flow-prediction algorithms, predict the ship’s long-distance voyage, taking into account the ship’s current status, and then plan a new route if necessary.
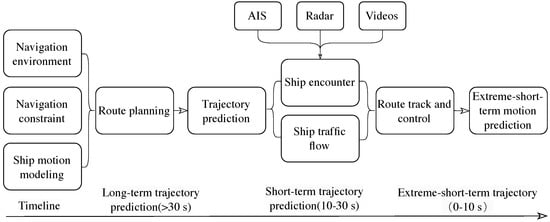
Figure 3.
Flowchart showing the process of ship-motion prediction.
In situations where navigation trajectories are insufficient or when encountering complex traffic scenarios, ship operators traditionally communicate through Very High-Frequency (VHF) communication to determine navigation priorities and ship routes during these encounters. For unmanned autonomous ships, however, obtaining navigation priorities and predefined routes directly through VHF is challenging. Instead, these ships rely on onboard perception systems to sense the navigation environment. They consider navigation collision-avoidance rules and the predicted trajectories of other ships to determine the optimal route and ensure a safe and reasonable collision-avoidance process. Thus, for unmanned autonomous ships, short-term predictions (approximately 10–30 s) become especially critical.
During the motion control (trajectory tracking and path following) for the defined route, an unmanned ship needs to predict the ship’s motion in an extremely short time, obtain good motion control performance, and guarantee navigation safety, especially for the model-based control methods, such as model predictive control (MPC) and optimal control [,]. This motion prediction is defined as extremely short-term prediction (approximately 0–10 s). Extremely short-term prediction should take into account the ship’s motion states and environmental disturbances with sensors or observers and employ suitable control algorithms to calculate the steering commands with time delays.
3. Ship-Navigation Environment Modeling and Prediction Methods
3.1. Characterizing Navigational Environmental Factors
The ship-navigation environment typically refers to the hydrological, meteorological, topographical, and traffic conditions around ships’ navigational waters. For intelligent ships, it is essential to obtain reliable information about the navigational environment that can be exported to the navigation control system. This information can be acquired through the use of AIS, radar, cameras, sonar, depthometer, pitometer, anemometer, and other sensors and analyzed with the data processing and fusion []. Environmental factors affecting ship navigation include both static and dynamic aspects. Specifically, the static factors primarily refer to navigational water depth, shorelines, islands, reefs, and obstacles like sunken ships, which are typically marked on paper or electronic charts and are used to plan routes before a voyage begins. During the voyage, the ship continuously updates its position, calculates distances from static obstacles, and ensures that it avoids accidents like running aground or colliding with obstacles. The dynamic factors mainly involve wind, waves, currents, visibility, traffic flows, and ship-behavior characteristics in the navigation area. Dynamic factors are subject to change over time. They can be predicted dynamically using ocean and weather forecasts, traffic flow predictions, ship behavior detection, or real-time data collection from onboard sensors. These predictions are commonly used for dynamic route optimization, collision avoidance, and navigation control.
3.2. Static Environmental Factors
Electronic charts (nautical charts) provide precise information about static obstacles and can overlay dynamic data from sensors such as the Global Position System (GPS), radar, and AIS onto the electronic chart. Due to the presence of measurement errors in radar data, existing electronic charts and radar systems can introduce radar projection distortions when radar data are directly overlaid on electronic charts. To address this issue, Naus et al. associated and matched electronic chart information with radar data, projecting radar echo vector data into the coordinate system of the electronic chart []. This eliminates radar measurement errors, enhances the accuracy of obstacle identification by radar, and allows ship operators to better monitor the navigation situation.
During autonomous ship navigation, ships heavily rely on real-time data from sensors and electronic charts. While electronic charts contain these data, there are relatively few open-source interfaces for research and development. Blindheim et al. use Python and Electronic Navigation Chart (ENC), an open-source electronic chart, to create interfaces displaying water depths, islands, reefs, and shallows within a ship’s navigational area, facilitating ship-route planning and optimization []. Zhang et al. employed machine learning algorithms to analyze ship AIS data and quantified the risk of ship grounding using proximity prediction and depth information []. This approach is validated on a Ro-Pax ship in the Gulf of Finland, helping to prevent ship grounding and improving ship navigation safety.
To study the impact of offshore wind farms on ship-navigation risks, Xue et al. applied adaptive brainstorming with variable disturbances to collision-avoidance decisions in encounters near wind farms []. This approach considers the safety of nearby ships when following traditional collision-avoidance rules, and its effectiveness and reliability have been verified through theoretical calculations and simulations for different encounter scenarios near wind farms.
Addressing the issue of limited environmental perception for ships under restricted sensing conditions, Shi proposes a method for modeling the navigation area map of unmanned ships based on high-resolution satellite imagery []. This method employed high-resolution maps for land-sea segmentation, obstacle detail enhancement, and morphological transformation through image processing. It identifies obstacle areas and edge points, constructing a navigation map for unmanned ships to aid in route planning. This approach demonstrated effective recognition of static obstacles in unknown areas but requires frequent updates of satellite imagery.
Current research has made significant progress in studying natural static obstacles that ships encounter during navigation and those that may affect normal ship operations. Various algorithms can reconsider the impact of obstacles and generate reasonable routes. However, challenges arise when dealing with dynamic obstacles that change over time, such as sunken ships and fishing nets. Some obstacles can be updated in electronic charts, but others, like fishing nets, change dynamically with the operating areas of fishing ships. During ship navigation, mariners often need to combine electronic charts with visual observations to adaptively plan routes and avoid challenging situations that may affect normal ship operations.
Let us take an example to illustrate the above issue. Our team conducted a task of autonomous navigation journey in the East China Sea from July 2023 to August 2023. Since all the functions of the ship are in the testing stage, some experienced captains were on the ship during the test, and in emergency situations, the crew has a higher prioritization than the algorithms and the auto navigation model. In Figure 4, the red route represents the static route planned for a ship traveling from Zhoushan to Shanwei Port, taking into account the ship draft and economical cruising speed. The black trajectory represents the actual navigation route during the voyage, which encountered newly established wind farms, navigation announcements from the maritime management groups, a cluster of operational fishing vessels, and dynamic fishing nets during the fishing season. In response to these real-time conditions, the ship crew adjusted the navigation route based on the ship’s current status.
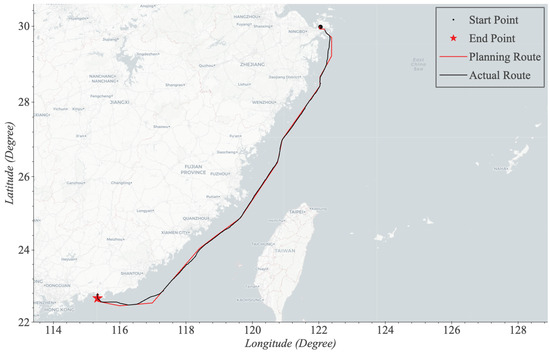
Figure 4.
Ship’s static planned route and actual navigation route.
3.3. Dynamic Environmental Factors
Dynamic navigational environmental factors primarily refer to disturbances within the navigational area, such as wind, waves, and currents. Wind and current data can be obtained directly through long-term observations and onboard sensors. However, the accurate modeling and prediction of sea waves is challenging due to their stochastic and complex nature. The navigational environment not only affects the safe operation of ships but also introduces uncertainty in fuel consumption, impacting route planning and optimization for long-distance ship voyages. Vettor et al. analyze different weather forecast models and compare them with the navigation routes of a container ship traveling in the North Atlantic []. The results show that the fuel consumption error caused by environmental model variations is approximately 10%.
In high-sea wind conditions, the interaction between waves and currents can significantly impact ship navigation. Chen et al. use third-generation wave models to study the effects of waves and currents on ship navigation []. Zwolan et al. incorporate wave models into ship navigation simulators to simulate ships’ attitude and motion in waves, providing valuable references for crew training and similar purposes []. Bingham et al. used Gazebo simulation in ROS2 (Robot Operating System 2nd) to model ship navigation in complex sea conditions, offering mathematical models for different wind, wave, and current conditions to create a simulation test environment for marine robotics []. Daisuke et al., through the study of AIS data from ship navigation in areas with currents, observed significant deviations between the ship heading and bow direction [], effectively predicting currents within the ship’s navigational area. Yu employed wavelet transformation to decompose time series related to ocean wave factors and used the transformation results for training and predicting significant wave heights using residual neural networks []. The results indicate that wavelet transformation can improve the predictability of significant wave heights. Remya et al. used genetic algorithms to predict tidal currents, which proved to be more effective than harmonic analysis and fluid-dynamics-based methods []. Kavousi-Fard et al. decomposed current data into harmonic components and used these components in different Support Vector Regression (SVR) models for current prediction []. They tested this approach using data from a bay and found that it could achieve satisfactory prediction accuracy. This method, based on wavelet transformation and SVR, demonstrates effective current prediction.
Chen et al. established a numerical simulation model for different weather conditions combined with the Manoeuvering Modeling Group (MMG) model of the ship by using a weather model for the sea area in Japan, and they studied the impact of different models on the ship’s response to weather conditions []. This research is of great significance for the environmental perception and modeling of ship. Additionally, machine learning and numerical simulation methods have also been used for the modeling and numerical prediction of ocean wind, waves, and currents [,,,]. Deep neural network models can automatically learn and extract feature relationships in complex data. Xie extracted the spatiotemporal coupled features of ocean currents, captured correlations and dependencies between adjacent sea areas using the Spatial Channel Attention Module (SCAM), and used the Gated Recurrent Unit (GRU) to model the temporal relationships of ocean currents []. They developed a deep network model called Spatiotemporal Coupled Attention Network (STCANet), which outperforms traditional models such as History Average (HA) and Autoregressive Integrated Moving Average (ARIMA). Traditional ocean current prediction methods have difficulty considering both the temporal and spatial effects of the prediction of ocean current. Thongniran et al. designed a prediction method that combines spatial and temporal features []. This method uses Convolutional Neural Networks (CNNs) for spatial prediction of ocean currents and Gated Recurrent Units (GRUs) for modeling the temporal features of ocean currents. It is compared with traditional models like ARIMA and K-nearest neighbors (KNN) using data from the Gulf of Thailand. The results show that the method combining spatial and temporal features had better prediction accuracy. To study the predictive performance of different machine learning algorithms on oceanographic parameters, Balogun [] combined ARIMA, Support Vector Regression (SVR), and Long short-term Memory (LSTM) neural network models to model and predict different oceanographic elements. They used data from the Malaysian Peninsula region for validation. The results indicated that different prediction models had varying levels of accuracy for different elements. The accurate prediction of specific ocean parameters requires a reasonable choice of modeling methods and parameters. For the weather factors, Figure 5 shows the ocean weather conditions, including the bathymetry, current and significant sea height for the southeast coast of China, the different weather aspects affect the ship navigation from the motion, fuel consumption, and even safety.
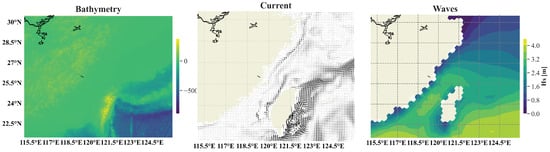
Figure 5.
Metocean data for the southeast China Sea.
Different prediction algorithms used in the dynamic environmental factors are compared in Table 1.

Table 1.
Summarizing the prediction algorithms used in the dynamic environmental factors.
3.4. Ship Navigation Behavior, Traffic Flow Modeling and Prediction
Maritime traffic flow is a manifestation of ship behaviors, and it contains a wealth of information. It is the result of interactions among various elements involved in maritime traffic according to certain rules. Modeling and analyzing maritime traffic flow can guide ship-navigation decisions and control. The modeling of traffic flow is primarily based on analyzing the characteristics and distribution patterns of historical data. It is then combined with simulation methods to replicate traffic flow. Key aspects of modeling and simulation involve data collection, processing, and traffic-flow-generation methods []. Maritime traffic flow, as the macroscopic representation of ship behavior, characterizes the navigational situation of ships in specific areas. Research on modeling maritime traffic flow and ship behavior is beneficial for safety supervision and traffic flow organization and planning.
AIS data are commonly used as a data source for maritime traffic flow. They are utilized for extracting waterway traffic elements, clustering ship behaviors, and predicting ship behaviors. AIS data have various applications in maritime traffic services and collision risk assessments []. With the continuous accumulation of AIS data and data mining, there are still many unexplored possibilities []. AIS data contain crucial information about the ship-navigation status. In busy waterways, AIS data can be incomplete or missing. To improve the accurate monitoring of ship speeds in such areas, Zhao et al. used UAV (Unmanned Aerial Vehicle) onboard video for ship speed extraction []. They employed a simple linear tracking method with depth correlation metrics to extract ship speeds. Furthermore, satellite-based AIS stations enable the monitoring of global ship data. Yan et al. combined support vector machines and random forest methods to classify different types of ships and identify abnormal behaviors in satellite-based AIS data []. Considering ship behavior features, the ship identification accuracy reached as high as 92.7%.
Due to the presence of anomalies and errors in ship AIS data, it cannot be directly used for modeling and predicting traffic flows. Guo et al. collect knowledge about ship movements from the raw AIS data []. They use interpolation to estimate potential errors in the original trajectories. An improved K-means clustering method is then applied to assign weights to datapoint errors. In another study, the authors analyzed parameters affecting frequencies of ship encounters []. They introduced a method for predicting traffic-flow behaviors and ship-encounter frequencies with a time constraint, which finds applications in areas like offshore wind farms and fisheries. Liu et al. proposed a method that incorporates an attention mechanism into GRU and optimizes the GRU parameters using intelligent optimization algorithms for the detection of ship anomalies []. This approach trains on ship AIS trajectory data using the TensorFlow framework and reduces the time required for ship anomaly identification. Han et al. introduced a density-based spatial clustering method called DBSCAN (Density-Based Spatial Clustering of Applications with Noise) []. They adjusted clustering-algorithm parameters using a data-driven approach to model ship behavior based on ship AIS trajectory points, identifying abnormal ship behaviors. The effectiveness of behavior extraction is validated using AIS data from the Gulf of Mexico and the Great Lakes.
Zhang et al. use an adaptive particle swarm optimization algorithm to adjust the structure parameters of a BP neural network []. They developed an improved Particle Swarm Optimization-Back Propagation (PSO-BP) prediction model to predict the total ship traffic flow in a harbor area, which was validated in the Port of Los Angeles and demonstrated good results. To enhance the accuracy of prediction of the ship’s traffic flow, Ye et al. leveraged the advantages of the encoder-decoder structure to capture long-term dependencies in time series data [], this improvement aims to address the issue of cumulative errors that traditional iterative methods often face. They proposed a multi-step prediction method for ships’ traffic flow based on an LSTM encoder, which involves the statistical analysis of ships’ traffic flow and is validated to be effective. Shi et al. based their modeling of ships’ abnormal behavior on trajectory data, approaching it from a spatial information perspective []. They modeled the rules of collective ship behavior and use a graph-based approach to determine abnormal ship behavior from spatial information. Then, they apply the Isolation Random Forest algorithm to detect abnormal ship behaviors.
For AIS data processing, the data cannot be used directly, as shown in Figure 6, and we have taken an example of using different algorithms include Bi-directional Long short-term Memory Recurrent Neural Networks (BLSTM-RNNs), Artificial Neural Network (ANN) and Piecewise Cubic Hermite Interpolating Polynomial (PCHIP) to restore the lost data; the BLSTM-RNNs has a good result for the AIS data restoration for the curve and straight trajectories in Hubei Wuhan, where the RMSE is near about 25 m, which is acceptable for the ship trajectories in inland area. Our analysis utilizes approximately one month of AIS data from August 2022, focused on the Zhoushan region of Zhejiang province. This area exhibits a highly complex traffic flow, encompassing numerous ferry routes between stops, cargo ships from diverse ports, and anchorage activities. To analyze these historical AIS trajectories, we employed a distance-based clustering method. This approach successfully identified nine distinct groups, with each subgroup characterized by similar trajectory patterns. Moving forward, we intend to leverage these insights to model individual ship-navigation behavior, enabling future research endeavors in trajectory prediction, behavioral discrimination, anomaly detection, and data mining.
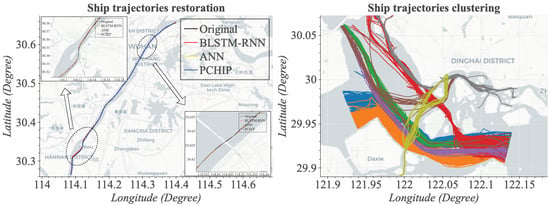
Figure 6.
Ship trajectory restoration using different algorithms and trajectories clustering using a distance-based algorithm.
Navigation-environment modeling is relevant to ship route planning and optimization, ship-collision-avoidance route design, and the best timing for switching the collision-avoidance routes in real-time navigation control. The comprehensive modeling of the navigation environment takes into account factors affecting ship navigation control, trajectory prediction, and route optimization across different time dimensions. The ship-navigation environment modeling and prediction methods are summarized in Table 2.
Table 2.
Methods for characterizing the navigation environment.
4. Ship Motion Modeling and Prediction Methods
4.1. Ship Motion Model
The motion of a ship in the water involves six degrees of freedom, with a typical consideration of sway, heave, and yaw as the primary three degrees of freedom. The propulsion methods for ships mainly involve propellers and rudders. The number of independent control variables is usually less than the number of motion degrees of freedom, resulting in underactuated characteristics in ship motion. Additionally, since ships are affected by external factors like wind, waves, and currents during navigation, predicting unmanned ship motion is a complex task. The ship coordinate system and motion models are illustrated in Figure 7.
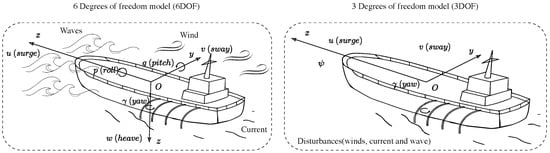
Figure 7.
Six-DOF and three-DOF ship motion models.
Ship-motion models are generally classified into hydrodynamic models and responding models []. Hydrodynamic models include multiple linear and nonlinear hydrodynamic parameters and disturbance coefficients and can be further divided into Abkowitz models and Maneuvering Modeling Group (MMG) models [,]. Abkowitz models analyze and solve the forces acting on the ship hull, propellers, and rudders as a whole, while MMG models create separate hydrodynamic models for the ship hull, propellers, and rudders to analyze the individual hydrodynamic effects.
Responding models represent another form of mathematical ship-motion model. Starting from an engineering control perspective, Nomoto views a ship as a dynamic system, with the rudder angle as the system input and the heading angle or yaw rate as the system output []. These models can be classified into first-order and second-order linear models and nonlinear models. Depending on the level of simplification of the mathematical model, they can be categorized as single-degree-of-freedom, three-degree-of-freedom, four-degree-of-freedom, and six-degree-of-freedom models [,,,]. Different mathematical motion models contain various dynamic parameters, which are estimated through maneuvering experiments or derived from model-scale tests of hydrodynamic parameters; the CFD can also be used for parameter calculations []. A three-degree-of-freedom (DOF) Abkowitz motion model is shown in Equation (1).
where m represents the actual mass of the ship; is the longitudinal coordinate of the ship’s center of gravity along the x axis; and X, Y, and N represent the components of hydrodynamic forces and moments acting on the ship in the three degrees of freedom u, v, and r, respectively. is the moment of inertia of the ship around the vertical axis through its center of gravity, which governs its resistance to rotation around that axis. In the context of ship navigation, when considering the impact of external factors such as wind, waves, and currents on a ship’s motion, a coupled superposition approach is applied. The model (1) involves combining the forces acting on the ship in these environmental conditions and, guided by empirical formulas, integrating the ship’s dynamic state. This process is used to assess how the interference from these environmental factors affects the navigational state of the ship.
Accordingly, a three-degree-of-freedom (DOF) MMG motion model is shown in Equation (2).
where the ship’s inertia force term is included on the left side of the equation. On the right side of the equation, , , and represent the hydrodynamic forces in the forward direction caused by the viscous fluid, the propulsion force from the propeller, and the force from the rudder, respectively. and represent the hydrodynamic forces in the lateral direction caused by the viscous fluid, the propulsion force from the propeller, and the force from the rudder, respectively. , , and represent the hydrodynamic moments (causing rotation) in the yawing direction (yaw) caused by the viscous fluid, propulsion torque from the propeller, and the torque from the rudder, respectively. When a ship is affected by wind and waves, it is necessary to analyze the forces exerted on the ship by these environmental factors. These forces are then decomposed into the ship’s direction of motion, allowing for the quantification of the interference experienced by the ship.
Accordingly, a responding motion model is shown in Equation (3).
where represents the rudder angle or steering angle. r represents the yaw rate, which is the change rate of the ship heading. K, , , and are control parameters related to the control system. represents the rudder deflection angle. and are constant coefficients or parameters. As the parameters of responsive models are typically derived from ship-maneuvering experiments to describe the influence of steering on a ship heading, it becomes challenging to directly superimpose external disturbances from the maritime environment onto the ship-motion model. When considering the effects of wind and waves on a ship heading, it is common to simulate them using stochastic noise. As for the influence of ocean currents, it is addressed by vectorially superimposing the current’s velocity direction directly onto the ship’s navigational state.
Alongside the accumulation of ship maneuvering control and navigation data, apart from the model (1)–(3) mentioned earlier, black-box models based on neural networks, data, and similar techniques are gradually finding applications in ship motion prediction and navigation control [,,,]. Black-box models can take into account a wider range of inputs, leading to higher predictive accuracy. However, these models are typically trained using complex mathematical algorithms, and their internal structure is typically composed of a large number of parameters, making them difficult to understand and explain, so these models are less amenable to mathematical representation and heavily rely on the accuracy of input data.
Three types of ship handling models are commonly used for ship motion control. Model (1) is relatively complex and provides high accuracy. It is based on Taylor’s expansions of the forces acting on the ship in different directions. Each hydrodynamic parameter in this model has a clear mathematical interpretation. However, this model has many hydrodynamic derivatives that lack direct physical meaning, making them challenging to measure directly. Parameter-identification methods are often used to determine these non-measurable hydrodynamic parameters, allowing for the accurate simulation of ship handling. While it provides high accuracy, the modeling and parameter identification can be demanding in simulation environment.
The model (2) differentiates the effects of the hull, rudder, and propeller on ship handling performance. Model parameters can often be obtained directly through towing tank experiments, free-running model tests, or CFD. However, high requirements are placed on the hydrodynamic derivatives and the disturbance coefficients between the hull and the rudder/propeller. Models (1) and (2) are frequently used with model-scale ship tests, and their parameters correlate strongly with model accuracy. However, it may not fully capture environmental disturbances to the ship’s motion.
Model (3) only considers the relationship between control inputs and state outputs. The parameters for this model can be obtained directly through full-scale ship maneuvering experiments, and it does not suffer from scale effects. Model (3) is commonly employed in automatic steering systems and heading controllers in the operations of real ships.
Due to the need for extensive data accumulation and model training, black-box models are currently less commonly applied in practical ship state and navigation control. Most algorithms are still in the research and testing phase. However, as ships become more intelligent and accumulate a growing amount of navigation data, this trend will likely promote the application of data-driven black-box models in ship motion prediction and navigation control.
The choice of model depends on the specific application, the level of precision required, and the available data and experiments. Different mathematical models are suitable for different scenarios. It is essential to choose the appropriate model based on the specific research requirements. Ship motion models are valuable for studying ship handling and seaworthiness. They are used to investigate ship control maneuvers and navigation attitude control, often in combination with the impact of marine environments on ship motion and disturbances. These models find applications in simulation studies, where they can help to analyze and understand various aspects of ship behavior under different conditions.
4.2. Ship Extreme Short-Term Motion Prediction
Ship motion models encompass the ship motion states and control inputs. Precise motion models can accurately describe the ship’s state and predict its motion trends. high-precision modeling and parameter identification of ship motion models are especially important. The identification of ship maneuvering motion relies on mathematical models of ships, parameter-identification methods, and maneuvering motion data. Mathematical models of ships’ maneuvering motion include the models mentioned above. Common parameter identification methods include least squares [,], Kalman filtering [,], support vector machines [,], neural networks [,], least squares support vector machine methods [,,], particle swarm optimization algorithms [,], and Bayesian methods [,], among others. Several scholars have conducted in-depth research on this [,,]. Maneuvering motion data are primarily obtained through zigzag tests and turning trials.
In extremely short-term prediction periods, due to the brief prediction duration, variations in the ship navigation environment can be ignored. These methods only focus on the immediate impact of the current environment on the ship’s motion to predict its state. Methods using mathematical models for the prediction of ship motion mainly consist of linear and nonlinear predictive methods. Prediction methods based on mathematical models of ship motion can predict certain aspects of a ship’s motion state. However, due to the nonlinear and time-varying nature of ship-motion models, complex motion states require more sophisticated and accurate motion models. For example, the ship-heading prediction, which represents a single-degree-of-freedom motion prediction, often employs the responsiveness model proposed by Nomoto []. Large ships on long-distance ocean voyages use different heading directions planned along the route for long-distance course-keeping. Early automatic steering is used to control the heading.
For the speed control in unmanned ships, a data-driven model-free elastic speed control method is presented in []. This method learns the rules of elastic speed control from a neural network predictor, determining the optimal input for motor control. The effectiveness of the algorithm is validated through simulation testing. Xu et al. applied a physics-informed neural network for parameter identification of a three-degree-of-freedom motion model in unmanned ships []. By combining data-driven and physical model advantages, they constructed a loss function for predicting the motion attitude of unmanned ships based on velocity and steering models. Compared to traditional neural network models, this approach shows better predictive performance.
In [], a black-box motion model for unmanned ships is established. They employed a weighted Least-squares support vector machine based on the Sparrow search algorithm for parameter identification of unmanned ship motion models. To enhance the algorithm’s stability and robustness, they introduced weighted least squares and the Sparrow Search Algorithm (SSA) for parameter optimization. The results show that the proposed black-box motion model has good generalization ability and could effectively predict the motion state of unmanned ships. Wang et al. collected data on the changes in ship steering angle input and ship heading change during ship operations []. They compared seven different regression algorithms and selected the best one to establish a ship-heading prediction model. They introduced an Antlion Optimizer (ALO) algorithm to search for the optimal weights for the prediction model, which was used in ship-course-keeping control.
The navigation attitude of unmanned ships is a complex, time-varying, and nonlinear system. Traditional algorithms for predicting unmanned ship attitudes could suffer from low accuracy, poor robustness, and limited practical application. Zhang et al. combined CNN with LSTM to build a data-driven neural network model for predicting the roll attitude changes in unmanned ships []. They used CNN to extract time series features and LSTM to predict the attitude at the next time step, which showed good prediction accuracy when validated on a real dataset of unmanned ship motion.
The extreme short-term motion-prediction performance with different methods is compared in [], which can be seen in Figure 8. Some algorithms used for the extremely short-term ship-motion prediction were summarized in Table 3.
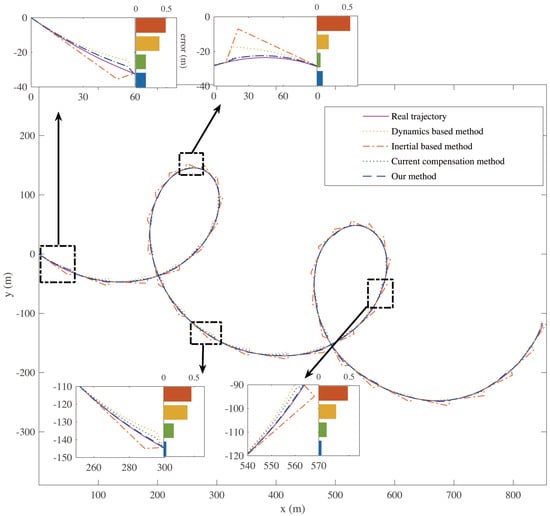
Figure 8.
Extremely short-term trajectory prediction [].
Table 3.
Summarizing the algorithms used for extremely short-term ship-motion prediction.
4.3. Short-Term Ship-Motion Prediction
During a ship’s voyage, it needs to perceive dynamic and static obstacles using various sensors and, based on its navigation status, avoid these obstacles. For intelligent autonomous ships, the generation of collision-avoidance paths often depends on collision-avoidance planning algorithms, especially for short-time and short-distance navigation re-planning. For the planning of collision-avoidance trajectories, time sensitivity is crucial. When dealing with the problem of collision avoidance among multiple autonomous ships, a distributed multi-unmanned collaborative ship-planning algorithm based on deep reinforcement learning has been proposed in []. This approach uses an improved reciprocal velocity obstacle as the reinforcement learning reward function and plans collision-avoidance routes for different obstacles based on gated recurrent unit neural networks. Xie et al. combined the Model Predictive Control (MPC) algorithm with a three-degree-of-freedom ship-motion model []. The improved Turn-Neyman algorithm is integrated with maritime collision-avoidance rules to solve the ship predictive collision-avoidance problem. The algorithm’s reliability was validated through simulations using the KRISO Very Large Crude Carrier no. 2 (KVLCC2) standard ship model.
Existing ship-collision-avoidance planning methods are primarily based on the Time to Closest Point of Approach (TCPA) and Distance to Closest Point of Approach (DCPA) between one’s ship and the target ship. They often do not consider the uncertainty of ship positions and velocities. In [], a ship-prediction probability collision0avoidance method is proposed based on the Kalman filter, which combines an Unscented Kalman Filter to predict the ship state and obtain the probability of ship positions. This information is then used to plan the optimal collision-avoidance route. Zhang et al. represent a ship’s time and path during collision avoidance using space reconstruction and describe the ship’s nonlinear motion with the MMG model []. It combines Nonlinear Model Predictive Control (NMPC) with an Extended Kalman Filter to address the ship motion prediction problem during the collision avoidance process, demonstrating the timeliness and reliability of the algorithm through simulations. The popular algorithms employed for short-term motion prediction are summarized in the Table 4.
Table 4.
Summarizing the algorithms used for the ship’s short-term motion prediction.
He et al. transformed the ship collision avoidance motion planning problem into a multi-constrained nonlinear optimization problem with controllability, navigation environment, and navigation rules []. A novel Model Predictive Artificial Potential Field (MPAPF) motion-planning method is proposed to generate the ship-collision-avoidance path. The different collision avoidance methods include the Dynamic Anti-collision A-star(DAA*), COLREGS-RRT, and Asexual Reproduction Optimization-Artificial Potential Field (ARO-APF) based on short-term prediction are compared in Figure 9.
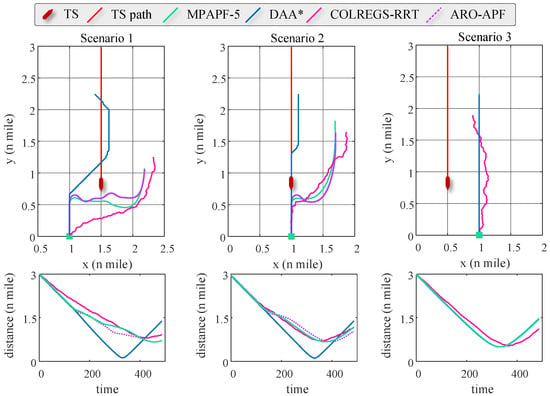
Figure 9.
Different collision-avoidance methods based on motion prediction.
4.4. Ship Traffic-Flow Modeling and Long-Term Trajectory Prediction
Predicting long-distance ship trajectories based on estimated ship traffic flow, historical trajectories, and time series data can contribute to enhancing the safety of maritime environments, organizing ship traffic, and optimizing resource allocation in special water areas. It is beneficial for ship-route planning and optimization, ultimately improving a ship’s navigational capabilities. Ships’ navigation trajectories contain various characteristics of traffic flow. The accurate prediction of ship navigation trajectories can facilitate the statistical analysis and modeling of traffic flow.
To fully exploit the traffic flow information contained in ship AIS data and accurately predict ship trajectories, ref. [] employs a prediction model called the MHA-BiGRU model, which is based on multi-head attention mechanisms and bidirectional recurrent units (BiGRUs). This model filters and modifies historical ship data, retaining more information and making predictions on time series data. The model correlates information from both historical and future ship trajectories, providing high precision, reliability, and ease of implementation.
Ref. [] uses various machine learning and deep learning algorithms to predict and analyze the historical movement trajectories of ships in different navigational environments. This analysis supports decision making for intelligent ship route planning, collision avoidance, and traffic management operations. Ref. [] utilizes historical AIS data from the Świnoujście port in Poland to establish ship traffic spatial distribution and probability models. These models analyze factors influencing the safe distance between ships, aiming to enhance maritime safety and reduce collision risks.
Ref. [] proposes three trajectory-similarity search models for historical trajectory points, trajectory databases, and historical trajectories, which are used for short-term and long-term ship-trajectory prediction and are tested for algorithm reliability using ships’ AIS data. Ref. [] constructs a Long short-term Memory Encoder (LSTM-ED) for training ship AIS data to develop and validate ship traffic-flow models. This approach shows better performance than traditional traffic-flow statistical baseline methods. Considering the presence of abnormal jump values in long-distance trajectory data, ref. [] integrates the LSTM structure into the deep learning Transformer framework, which leverages the strengths of Transformer and LSTM in dealing with long-distance dependencies in temporal and spatial features. The method employs time-window shifting and smoothing filtering to maintain trajectory smoothness, enabling the model to predict long-distance trajectories. Ref. [] utilizes a hierarchical clustering method to extract behavioral features from AIS data. This approach is more efficient than traditional Douglas-Peucker (DP) and Least-squares methods. The LSTM algorithm is then used to predict ship trajectories, resulting in lower prediction errors compared to traditional RNN algorithms. The Temporal Convolutional Network (TCN) has strong time memory capabilities and performs well in time series prediction. Ref. [] combines the attention mechanism with ship-trajectory time series (TTCN). They utilize one-dimensional convolutional units to extract high-dimensional features from the data and introduce mechanisms to enhance the learning of important features. This enables the training and learning of ultra-long time series data for ship trajectories. They use AIS data to construct a ship traffic flow dataset and compare it with traditional prediction methods, achieving better accuracy.
In order to investigate the efficiency of the trajectory prediction with different mentioned algorithms, we take some AIS data to implement the prediction algorithms. In Figure 10, we show different algorithms contains the LSTM, attention-based LSTM(ATT-LSTM), transformer with deep embedded clustering(TRFM DEC), CNN-LSTM, and Bi LSTM that we tested for long-term and short-term trajectory prediction; for the long and curved trajectories, the LSTM method has good performance in prediction, while for the short-term prediction, the CNN-based LSTM has good results for prediction, and the average error is 0.5 m for short-term prediction.
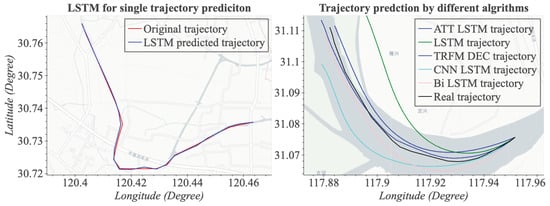
Figure 10.
Long- term and short-term trajectory prediction based on different algorithms.
To summarize, the ship-motion-prediction methods can be broadly categorized into three types based on different prediction lead times, prediction intervals, and prediction accuracy.
(1) Extremely short-term motion prediction: This type of prediction is used for ship motion control, where high demands are placed on the prediction lead time, accuracy, and update frequency. It is employed throughout the entire voyage, repeatedly, until the journey is complete.
(2) short-term motion prediction: This type of prediction is applied to avoidance of ship collision, planning, and decision making. When ships encounter each other, it is necessary for them to react accordingly until the specific encounter scenario ends. After ensuring there is no risk of collision, a short-term motion prediction cycle is completed.
(3) long-term trajectory prediction: This type of prediction is used in ship traffic organization and voyage-route optimization. It primarily serves voyage planning, taking into account the origin of the voyage task and the dynamic characteristics of the route. An optimal route is established for safe navigation. If the navigation conditions change during the voyage, the long-term motion predictions may need to be adjusted accordingly.
Different prediction types use different data sources, methods, and time frames. The choice of the most suitable prediction method for ship motion depends on factors like the actual ship situation, the sailing environment, and specific characteristics.
5. Applications of Ship Motion Prediction
5.1. Motion Control
Automated ship control takes into account the maneuverability of ships in complex environments and the influences of wind, waves, and currents on ship handling. Besides these disturbances, there might be other unknown disturbances to be considered, and observers need to be used to estimate these unknown disturbances. In trajectory-tracking control, it is essential to compensate for the effects of environmental disturbances. In order to improve the accuracy of navigation control, many methods are gradually applied in navigation tests and simulations.
MPC is a method that balances modeling, prediction, and control. It can use historical data to create a simple model of a ship’s maneuverability for trajectory prediction. By incorporating an extended observer, it can perceive the actual sailing conditions of the ship. For example, ref. [] proposes a guidance strategy based on NMPC for path following in unmanned ships. This strategy overcomes the limitations of Line-Of-Sight (LOS) navigation and uses an established state observer for tracking control of heading and speed.
To address the shortcomings of a ship motion control framework, which typically plans before tracking, ref. [] proposes an improved artificial potential field method combined with the MPC algorithm. This approach generates control trajectories for ship-collision avoidance. In complex navigational environments, it allows ships to navigate around obstacles safely, serving as the algorithmic foundation for controlling unmanned ships in complex sea areas.
The sailing environment can impact the ship’s motion model and control. For uncertain wave disturbances on ships, ref. [] introduces a parameter identification method using Least-squares support-vector Machines (LS-SVMs) to identify parameters for a four-degree-of-freedom MMG model. They also designed an online sliding-window modeling method to predict ship motion under wave interference.
To achieve real-time high-precision and anti-interference motion control for unmanned ships in complex scenarios, a study [] designed a NMPC trajectory tracking controller based on a three-degree-of-freedom hydrodynamic model for unmanned ships. This controller considers disturbances like wind, waves, and currents and uses a nonlinear disturbance observer to provide online compensation for the control model. The study’s findings confirm the effectiveness of the control algorithm.
5.2. Collision Avoidance Planning
Predicting collision-avoidance trajectories for ships requires considering the sailing status of both the ship and other ships. The ship’s sailing status can be directly obtained through positioning or inertial navigation. In contrast, information about other ships’ sailing statuses must be perceived using sources like AIS (Automatic Identification System), radar, video, and electronic charts to determine the motion of target obstacles []. The acquired information regarding other ships’ motions often contains errors and uncertainties. Hence, it needs the use of short-range prediction algorithms to predict their movement trends and calculate minimum encounter distance and closest encounter time. These algorithms must meet high standards for short-term ship-state prediction and encounter-situation assessment.
To address the challenge of accurately estimating the DCPA and TCPA of encountering ships, ref. [] decomposes ship AIS trajectory data into linear and nonlinear components. They then employed ARIMA and LSTM methods to model these two components. This modeling is utilized for trajectory prediction and collision-avoidance route planning.
Refs. [,] combined the principles of MPC with maritime collision avoidance rules (COLREG) to design a trajectory-based collision-avoidance planning method. They constructed window functions to reduce tracking errors and cost acceleration, which improved the algorithm’s reliability. This method predicts the sailing trajectories of encountering ships, uses convex free sets and maritime collision avoidance rules to develop collision-avoidance strategies, and generates planned routes.
To mitigate dangerous situations caused by abrupt changes in ship speed during trajectory prediction, ref. [] proposed an improved ant colony algorithm using an artificial potential field. This modification enhances the convergence speed and global optimization of the algorithm, resulting in smoother collision-avoidance planning trajectories and reducing the probability of accidents.
Zhu and Ding [] introduced a method for determining the optimal collision-avoidance point, which helps in defining the most effective collision-avoidance route based on the relative velocity and kinematic parameters between unmanned ships and obstacles. It calculates the ship’s best collision point, using the speed and heading-angle increments that can be reached by the ship to constrain dynamic window sampling. Simulation testing demonstrates that the proposed optimal collision-avoidance point method is more efficient and robust.
In a real-world navigation scenario, ships have to contend with the motion of other ships and various uncertainties caused by interference. To address these challenges, we implemented the virtual potential field and dynamic ship field methods for planning collision-avoidance paths. In October 2022, we specifically selected ships encountered in sheltered waters for testing, as shown in Figure 11, and we built a software platform and implemented the algorithms with Qt (verison 5.2), C++ (version 11), Python (version 3.10), and ENC (s57 standard) map for the automatic control for a 40 m length USV. We tested the collision avoidance and control algorithms by using an intelligent ship equipped with radar, AIS, and an optoelectronic system. In the open sea environment, we designed a pre-determined route for the ship, which subsequently navigated along this planned trajectory. Meanwhile, the target ship, located ahead and on a directly opposing heading, maintained its course throughout the encounter. To avoid collisions, the ship dynamically replanned its route based on the relative velocity between the vessels. Aiming to prevent entering the target ship’s domain, the ship adjusted its speed to approximately 7 knots, maintaining a horizontal separation of approximately 120 m-roughly four times the ship’s length.
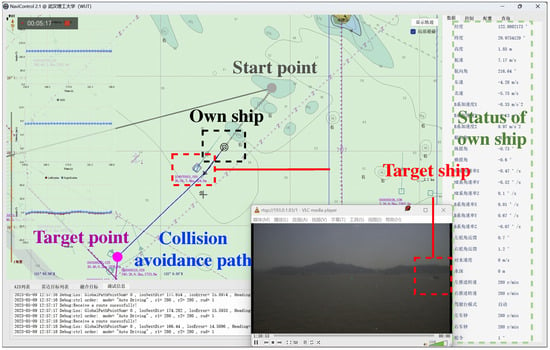
Figure 11.
Dynamic domain-based collision avoidance sea trial in Zhoushan.
5.3. Ship Voyage Optimization
In ship route optimization, various factors need to be considered, including sailing speed, water depth in the sailing area, disturbances like wind and currents, ship loading, fuel prices, and more. The goal is to achieve the lowest fuel consumption, minimize operations, reduce sailing time, maximize fuel efficiency, and minimize leasing costs [,,,]. Ships at sea can optimize their routes based on the influence of wind and currents, aiming to save fuel and ensure safe navigation. When sailing near the coast, factors such as islands and tides also need to be considered. The sailing environment significantly affects a ship’s movement. By combining a ship’s current status with historical traffic flow data and meteorological information specific to the sailing area, long-distance trajectories can be predicted and optimized, thus enhancing navigation safety and reducing the impact of the environment on navigation.
Ship-route optimization mainly consists of environmental modeling and optimization searching. To reduce the complexity of environmental modeling, the planning space is typically structured and transformed into a state-space search problem, which is further converted into a state-space path-search problem. These problems are addressed using search algorithms to obtain optimal solutions. Common ship-route-optimization algorithms include A*, Dijkstra, artificial potential fields, Rapidly Exploring Random Tree (RRT, RRT*), Isochrone, Dynamic Programming, 3D Dynamic Programming, genetic algorithms, simulated annealing, particle swarm optimization, neural networks, and more [,,,,,,,,,,].
Taking into account the influence of ocean currents and marine environments, ref. [] uses reinforcement learning in combination with ship motion models and map information to optimize ship routes. For unmanned ships operating in complex and dynamic environments, ref. [] combines the accelerated A* algorithm with the visibility graph algorithm, using a quadtree to perform fast searches on the visibility graph and improving trajectory update efficiency. Many optimization and planning algorithms apply to optimizing ship routes in nearshore waters, considering aspects like maritime safety, avoiding grounding or collisions, and fuel savings [].
In traditional RRT algorithms, the planned trajectories may suffer from issues like lack of smoothness and excessive travel distances. Guo et al. [] employed quadratic Bézier curves and the Dijkstra algorithm for trajectory pruning within the RRT algorithm, making the generated trajectories smoother. They also used Morphin for global trajectory pruning, and simulations confirmed its suitability for route planning for unmanned ships in complex navigation environments.
Route-optimization algorithms each have their pros and cons. In the application of route optimization for unmanned ships, it is also necessary to incorporate maritime collision-avoidance rules, consider the maneuverability of the ship, and take into account the navigation environment. To address the shortcomings of optimization algorithms, it is possible to improve them by combining and using different algorithms, all in alignment with the ship’s objective functions.
Route-optimization algorithms can be used in voyage planning for long-distance routes based on objective optimization functions. In actual ship navigation, when encountering other ships, it is essential to follow maritime collision-avoidance rules according to the current collision situation. Different collision scenarios require considering maritime collision avoidance rules, the ship’s collision responsibility, and the necessary actions to be taken. When a collision-avoidance maneuver is needed, it involves adjusting the ship route based on the ship’s current state, considering factors such as ship maneuverability, target ship length, width, DCPA, TCPA, the ship domain, and navigation conditions. This new route is followed for a certain period while implementing maneuvers such as altering the course, reducing the speed, or a combination of both [].
In dynamic encounter scenarios, it is necessary to consider the motion state of other ships. To ensure safe navigation, path-planning algorithms are applied to dynamically re-plan routes in local areas, generating new collision-avoidance trajectories that are both safe and efficient. Common collision-avoidance planning algorithms include A*, the artificial potential field method, velocity obstacle method, and RRT, among others [,,,].
The ship’s navigation environment significantly affects the accurate prediction of ship motion. The traditional modeling of motion models and parameter identification can adequately describe a ship’s motion status through mathematical modeling. However, achieving the real-time prediction of a ship’s motion status in complex navigation environments requires the rational selection of motion modeling and state prediction based on the specific focus of ship-motion control. By incorporating motion models into the modeling process, short-term and long-term trajectories of the ship can be predicted, providing insights into the ship’s motion response in the navigation environment. The accurate prediction of ship-motion status and practical application necessitates selecting appropriate prediction methods based on the application scenarios and ensuring the proper application of the prediction results.
6. Analysis of the Key Issues
Ship navigation research has tackled factors affecting sailing, traffic flow, motion models, and route optimization as separate modules. The focus now shifts toward integrating these for the better modeling and prediction of ship-navigation environments. In current research, simulation models are widely used to investigate existing problems and explore methods in depth. However, in practical engineering applications, the time-varying and nonlinear nature of the navigation environment and motion models present limitations in simulation-based methods. Unmanned ships highlight the need for the integrated modeling of navigation environments, dynamic traffic flow, and context-aware motion models, paving the way for automatic route planning and control decisions. The challenge lies in seamlessly integrating the navigation environment, traffic flow, and ship motion models for autonomous ships, enabling intelligent route planning and control in complex situations. These areas have seen relatively limited research. The specific limitations are as follows.
6.1. Online Modeling of Ship Motion
Due to the influence of the navigation environment, the motion models and model parameters of ships exhibit time-varying and uncertain characteristics. The accuracy of mathematical models of ship motion, based on the CFD simulations, empirical formulas, and experimental ship handling, is no longer suitable for precise ship control. Leveraging data from diverse sources like environment, traffic flow, and sensor readings can enhance the observation and modeling of disturbances impacting ship motion. By incorporating these disturbances into the model-building and parameter-identification process, intelligent ship-control systems can achieve higher accuracy and minimize errors. Combining environmental models within the navigational area with ship-motion-control models for online model establishment and parameter identification is essential for path optimization and control decision-making in intelligent ships. This approach effectively addresses navigation, decision-making, and control issues in intelligent ships and is a key indicator of the autonomous driving level and degree of automation in intelligent ships.
Figure 12 shows the prediction of ship speed during navigation using the xG-Boost (Extreme Gradient Boosting) machine learning algorithm. In the upper part of the figure, the blue curve represents the prediction of ship speed based solely on the ship propeller RPM (revolutions per minute). The red curve, on the other hand, takes into account additional factors such as the wind encountered during navigation and ocean current data specific to the navigational area. By comparing these two curves, it becomes evident that increasing the number of input parameters in the model significantly enhances the accuracy of ship speed prediction.
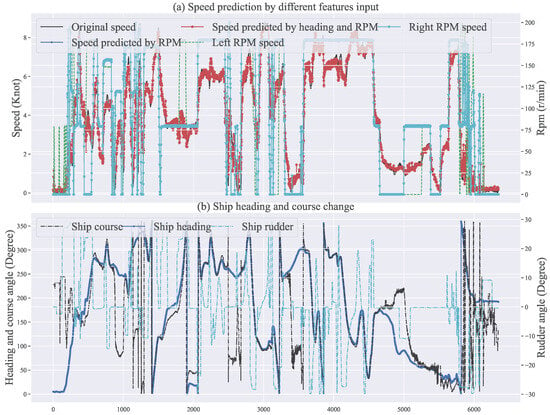
Figure 12.
Ship navigation speed prediction with different input characters and parameters based on the xG-Boost method in complex sea conditions.
6.2. Limitations of Simulation Validation
Based on the existing literature, most scholars primarily use simulation to study the modeling of ship motion in response to the effects of navigation environments, parameter identification, model development, and control. Environmental influences are often generated using random methods, while real navigation environments are complex, dynamic, and nonlinear, making it challenging to directly describe key factors affecting ship-motion modeling and control with mathematical equations. It can be challenging for simulated environments to replicate the actual navigation state of ships accurately. Additionally, conducting real ship testing for large ships is costly. Current research often relies on scale models for experiments, which can reflect essential issues to some extent. However, due to scale effects, the results may vary for medium and large ships. There is a considerable gap between ship-simulation research and engineering applications. Precise data collection, historical playback, and specific ship-modeling and testing methods tailored to particular ships are required to meet the needs of motion prediction and control. For the implementation of these planning, collision avoidance, and control algorithms, many steps need to be tested before the final application in real conditions, these algorithms will not perform as well as the simulation tests.
As shown in Figure 13, prior to the final sea trials of our collision-avoidance algorithms for unmanned surface vessels (USVs), we conducted extensive simulations to validate their performance under safe and controlled conditions. These simulations comprised four key stages:
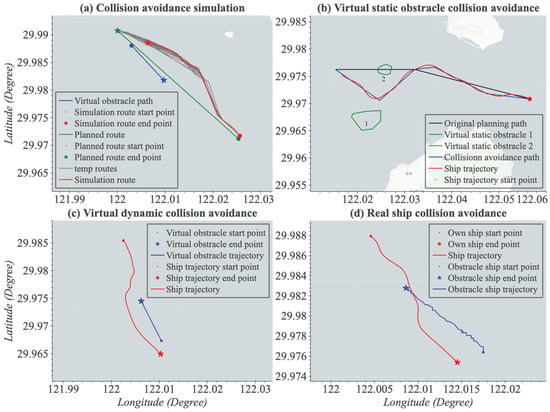
Figure 13.
Ship- trajectory tracking and collision-avoidance control simulation, virtual test, and sea trial in a real condition.
(1) Virtual collision avoidance with geographic information system (GIS) data in Figure 13a: We established a virtual environment using GIS data, where a virtual ship navigated directly toward a virtual USV in the open sea. This initial step assessed the robustness of the algorithm under predictable conditions.
(2) Virtual collision avoidance with static obstacles in Figure 13b: This stage introduced virtual static obstacles alongside sea trials, further challenging the algorithm’s ability to navigate complex environments.
(3) Virtual dynamic collision avoidance in Figure 13c: Building on the previous stages, we implemented virtual dynamic obstacles within sea trial simulations, simulating encounters with moving objects. This provided a more realistic test of the algorithm’s adaptability.
(4) Real ship encounter in Figure 13d: The final stage involved a real ship navigating toward the USV, allowing us to observe the algorithm’s performance in a live setting and verify its ability to generate optimal collision-avoidance paths.
It is important to acknowledge that significant effort is required to bridge the gap between simulation and real-world testing. Sea trials often present unforeseen circumstances that cannot be fully replicated in simulated environments. Consequently, the transition from simulation to sea trials necessitates iterative refinement and validation. In essence, while simulations offer valuable insights, their limitations necessitate real-world testing for comprehensive performance evaluation.
6.3. Consistency in Modeling, Optimization, and Control
In the existing body of literature, the prevailing trend in current research leans towards the independent development of ship motion models, optimization algorithms, and various other aspects. A notable drawback of this approach is the absence of a unified standard interface for both input and output data across these models. This deficiency gives rise to a lack of general and consistent models, particularly in the realms of ship-route optimization, collision-avoidance planning, and navigation-motion control.
From the vantage point of intelligent ship navigation and control, there emerges a critical need to amalgamate diverse systems. This integration should aim to simplify the complex processes involved in motion modeling, motion prediction, and navigation control. The ultimate goal is to achieve a higher degree of automation and intelligence in the domain of ship navigation control. The absence of a standardized interface impedes the seamless exchange of information among different modules, hindering the establishment of a cohesive and interoperable framework for ship navigation.
In the shipping industry, there are many aspects that need to be considered between the planning and the final navigation or ship control. As shown in Figure 14, before the ship leaves the ports, the planners will draw up a route according to the departure, destination, and navigation task. Sometimes, the route will not be the best option for every ship, and the researchers will optimize the route based on the forecasted weather and the ship-performance model, while the performance model is summarized by the empirical formula or the historical data. For the ship’s operation, once the route is designed or optimized, the ship operators will drive it based on their experience or the maneuverability of the ship, wile the maneuverability is changed based on the different navigate status. For intelligent navigation, all the aspects need to be considered using the performance model, maneuverability, and control algorithms.
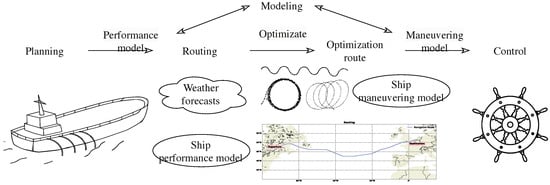
Figure 14.
Ship route planning, optimization, and control system.
To address this challenge, future research efforts should concentrate on the development of a standardized interface that can serve as a common language for communication among various ship-navigation systems. This unified interface would facilitate the integration of motion models, optimization algorithms, and other components, fostering a more cohesive and interoperable approach to ship route optimization, collision-avoidance planning, and navigation motion control. Such an integrated and standardized framework holds the potential to streamline the development and implementation of intelligent navigation and control systems for ships, paving the way for enhanced safety, efficiency, and automation in maritime operations.
7. Trends in Technological Development
With the development of computer technology, artificial intelligence technology, marine environmental observation technology, and ship motion prediction technology, great progress has been made. In the future, ship-motion-prediction technology will develop in the following directions.
7.1. Trajectory Prediction Based on the Fusion of Multi-Source Sensor Data
In complex navigation scenarios requiring collision avoidance, a single sensor has limitations on target recognition. Ship operators need to combine the information from different sensors manually or according to their experience, making it difficult to perceive obstacles effectively. This necessitates data fusion from multiple sensors for trajectory prediction to provide more accurate assessments of ship-navigation encounters. Existing perceptual environment modeling primarily focuses on the recognition and tracking of static and dynamic obstacles in collision-avoidance decision-making scenarios. This research combines the ship’s navigation status with the recognition and tracking of obstacles. With the advancement of ship intelligence and unmanned navigation, unmanned ships adhere to maritime collision avoidance rules designed for manned ships. Nevertheless, unmanned ships typically exhibit superior maneuverability and increased levels of automation. In the context of autonomous navigation, it becomes crucial to autonomously and accurately perceive the surrounding navigation environment. Combining navigation-environment modeling with route planning for unmanned ships can enhance the reliability of route selection and navigation control, harnessing the advantages of intelligent navigation decisions. The fusion of multi-source shipboard data with route planning plays a crucial role in optimizing navigation routes and navigation control. The fusion of AIS, radar, and GPS data is applied for different navigation trajectories, which is used in Figure 15.
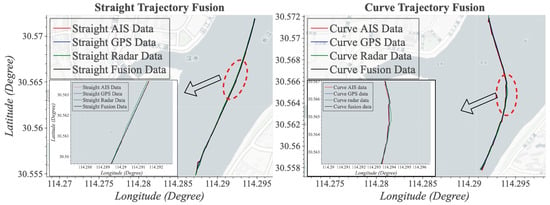
Figure 15.
Trajectory fusion from AIS, radar and GPS based on the straight and curved conditions.
In adverse weather conditions, it is essential to consider factors like wind, waves, and currents that can significantly impact the navigation of unmanned ships, particularly in high-sea conditions. In such scenarios, it is about not only planning collision-avoidance routes but also optimizing navigation-control strategies based on the current sea conditions. This is crucial for reducing the impact of waves on the ship, thereby enhancing both the efficiency and safety of ship navigation.
7.2. Integration of Environmental Modeling, Route Optimization, and Motion Control
Traditional navigation and control systems have three relatively independent modules: guidance, navigation, and control. With the development of intelligent navigation and unmanned technologies in ships, these modules become more closely intertwined. From a planning perspective, static and dynamic environmental models of navigation will significantly influence route planning for ships. In actual navigation, weather conditions and environmental modeling can impact route optimization and control for local ship encounters. Starting with the establishment of environmental models and extending to route optimization and control decision making, integrated system models should be created. The integration spans from perception systems to decision systems, utilizing optimization algorithms to select and establish the best models that are suitable for decision making and control in intelligent and unmanned ships.
In the context of intelligent and unmanned ships, route optimization is focused on long-distance, extended-time motion planning, where factors like distance, energy consumption, and voyage duration are considered. On the other hand, ship motion control emphasizes short-distance, short-term motion tracking control, accounting for navigation risks and collision avoidance decisions during the voyage. Both aspects need to be effectively combined. It is necessary to choose appropriate routes while also considering the current encounter scenarios and selecting the right collision avoidance routes and control decision-making methods to ensure the economic efficiency and safety of navigation.
The issue of transitioning between global, long-distance route optimization and local, short-distance collision-avoidance decision making will be a focal point of research for intelligent ships and unmanned ships in autonomous navigation control. This transition impacts not only the economic effectiveness of ships but also their navigational safety. As illustrated in Figure 16, we have employed both 2D Dynamic Dijkstra and 3D Dynamic Dijkstra by considering the variable speed of each sub-route, to optimize the path from America to the English Channel across the North Atlantic Ocean. The optimized route not only saves more distance but also yields a significantly lower wave height compared to the original route.
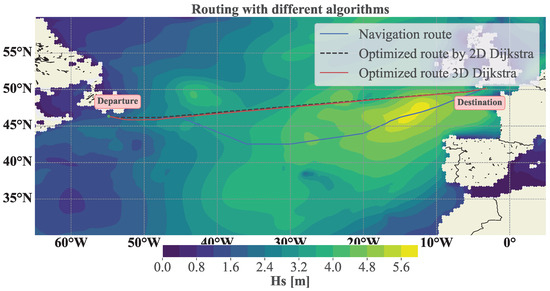
Figure 16.
Route planning with different weather models and optimization methods.
7.3. Mechanism and Data-Fusion-Driven Modeling
As ships evolve toward increased automation and intelligence, traditional ships are adopting advanced sensors to support navigational decision making and control. In open sea areas, these technologies serve as valuable assistants for ship operators, yet in complex navigation scenarios, the precision of models and algorithms may fall short of expectations. Shipping companies, armed with extensive operational and navigational data, possess valuable experience for decision making and operations. Leveraging this wealth of data and experience is pivotal for enhancing navigation safety and precision while reducing the labor intensity for operators.
The volume of data related to navigational environments and decision-making control is anticipated to surge as accumulation continues. high-precision, large-scale operational data play a pivotal role in propelling the advancement of intelligent and unmanned ships, as well as contributing to the digitization of the maritime industry. Extracting valuable insights from this extensive data pool, especially regarding key factors influencing navigational decision making and control for intelligent and unmanned ships, promises substantial advancements.
The increasing utilization of machine learning and deep learning algorithms is poised to significantly augment perception and decision-making capabilities during ship navigation. This shift toward advanced algorithms is expected to result in enhanced autonomy for intelligent ships, leading to reduced human intervention, heightened efficiency and safety, and lowered operating costs. The continuous evolution through data-driven modeling, accumulation, iteration, and updates will contribute to the increased accuracy of ships’ navigational environment and motion-control models. The principle of the mechanism and the data fusion-driven modeling method is shown in Figure 17.

Figure 17.
Mechanism and data-driven model fusion.
7.4. Time Series Modeling and Multi-Objective Prediction
Conventional predictions of a ship’s motion state heavily rely on precise mathematical models dedicated to a ship’s motion. These models are intricately integrated with a ship’s responses in diverse settings, utilizing model-prediction methods to anticipate a ship’s motion. The intricate challenge lies in the time-varying nature of ship motion and navigational environments, rendering the use of mathematical models complex. Hence, the establishment of time series models derived from high-precision data emerges as a critical necessity to seamlessly integrate data-driven ship motion prediction and control.
Moreover, deploying sensitivity-analysis methods allows for a comprehensive examination of key factors influencing ship motion control and their corresponding impacts. By identifying these critical factors, one can effectively model and predict navigational environment data. This process not only facilitates ship-route optimization but also contributes to the enhanced control of navigational environments, further emphasizing the importance of a data-driven approach in refining ship-motion prediction and control mechanisms. The performance of time series modeling and multi-objective prediction is shown in Figure 18. In Figure 18a the correlation of each state is presented with different shades of color, and Figure 18b,c shows the speed and roll angle prediction based on the input time series with the weather and control command information. The speed and roll can be predicted very precisely.
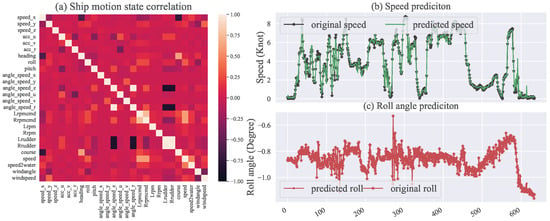
Figure 18.
Time series modeling and multi-objective prediction.
8. Conclusions
The vast reach of the oceans has, throughout history, ignited a flame of discovery and advancement. This dedication to progress extends to the field of ship navigation, which is currently experiencing a significant evolution in the wake of technological advancements. This transformation is fueled by several key trends and active research areas that are reshaping the future of intelligent ship navigation.
(1) Dawn of the autonomous age: Intelligence takes the helm. The most conspicuous transformation lies in the burgeoning field of ship autonomy and intelligence. Cutting-edge technologies like artificial intelligence are no longer futuristic fantasies; they are being strategically implemented in unmanned ships. Sophisticated navigational environment sensing and modeling prediction methods act as catalysts, paving the way for ever-more intelligent vessels. This synergistic integration is not just about automation; it is about reshaping the maritime industry, ushering in an era of unparalleled efficiency and safety. Imagine unmanned ships seamlessly navigating complex waterways, optimizing routes in real time, and evading dangers with preternatural precision. This is the future that intelligent ship navigation promises.
(2) Precision takes center stage: Modeling the seas with mathematical elegance. At the heart of intelligent navigation lies the power of precise mathematical modeling. Accurate models of the navigational environment and ship motion are the bedrock upon which robust algorithms are built. The future holds exciting advancements in simulation, virtual testing, and digital twinning-revolutionary methodologies that will redefine the validation and testing of design and control algorithms for unmanned ships. Think of it as pushing a virtual ship through a simulated ocean, testing its responses to every wave and current, all before it ever sets sail. This iterative refinement process will lead to more robust and reliable autonomous ships that are ready to conquer the real-world seas.
(3) Conquering time: A holistic approach to navigational prediction. The future of intelligent ship navigation isn’t confined to a single time horizon. A holistic approach that encompasses long-term, mid-term, and short-term ship motion prediction methods is rapidly emerging. This multi-temporal perspective addresses the multifaceted challenges faced by ships, from voyage planning and route optimization to real-time collision avoidance and dynamic decision making. Imagine a ship that can predict not only its immediate path but also anticipate potential hazards and weather patterns hours and even days in advance. This level of foresight will revolutionize maritime safety and operational efficiency, paving the way for a truly intelligent and autonomous future at sea.
Author Contributions
Conceptualization, X.C., C.L. and D.Z.; methodology, D.Z. and C.L.; software, D.Z., Z.H. and P.Z.; validation, D.Z., Z.H. and W.W.; writing—review and editing, D.Z., C.L. and X.C.; supervision, X.C. and C.L.; funding acquisition, X.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key R&D Program of China (2022YFB2602305), National Natural Science Foundation of China (52001240), Key Research and Development Program of Guangxi Zhuang autonomous region (GuikeAA23062052), the Natural Science Foundation of Chongqing, China (cstc2021jcyj-msxmX1220), the Open Project Program of Science and Technology on Hydrodynamics Laboratory (6142203210204).
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial Intelligence |
| AIS | Automatic Identification System |
| ALO | Antlion Optimizer |
| ANN | Artificial Neural Network |
| ARIMA | Autoregressive Integrated Moving Average |
| ARMA | Autoregressive Moving Average |
| ARO-APF | Asexual Reproduction Optimization-Artificial Potential Field |
| ATT-LSTM | Attention-based LSTM |
| BiGRU | Bidirectional gate recurrent unit |
| BLSTM-RNNs | Bi-directional Long short-term Memory Recurrent Neural Networks |
| BP | Back Propagation |
| CDF | Computational Fluid Dynamic |
| CNN | Convolutional neural network |
| DAA* | Dynamic Anti-collision A-star |
| DBSCAN | Density-Based Spatial Clustering of Applications with Noise |
| DCPA | Distance to Closest Point of Approach |
| DOF | Degrees of Freedom |
| DP | Douglas-Peucker |
| ENC | Electronic Navigation Chart |
| GIS | Geographic Information System |
| GNC | Guidance, Navigation and Control |
| GNSS | Global Navigation Satellite System |
| GPS | Global Position System |
| GRU | Gated Recurrent Unit |
| HA | History Average |
| IMO | International Maritime Organization |
| KNN | K-nearest neighbors |
| LOS | Line of Sight |
| LSTM | Long short-term Memory |
| LSTM-ED | Long short-term Memory Encoder |
| LS-SVM | Least-squares support-vector machine |
| MHA-BiGRU | multi-head attention mechanism and bidirectional gate recurrent unit |
| MMG | Maneuvering Modeling Group |
| MLP | Multilayer Perceptron |
| MPC | Model Predictive Control |
| MPAPF | Model Predictive Artificial Potential Field |
| NMPC | Nonlinear Model Predictive Control |
| PCHIP | Piecewise Cubic Hermite Interpolating Polynomial |
| PSO | Particle Swarm Optimization |
| PSO-BP | Particle Swarm Optimization-Back Propagation |
| ROS2 | Robot Operation System 2nd |
| RPM | Revolutions Per Minute |
| RRT | Rapidly exploring Random Tree |
| SCAM | Spatial Channel Attention Module |
| SSA | Sparrow Search Algorithm |
| STCANet | Spatiotemporal Coupled Attention Network |
| SVR | Support Vetor Regression |
| TCN | Temporal Convolutional Network |
| TCPA | Time to Closest Point of Approach |
| TRFM DEC | Transformer with Deep Embedded Clustering |
| TTCN | Tiered Temporal Convolutional Network |
| UAV | Unmanned Aerial Vehicle |
| VHF | Very High Frequency |
| KVLCC2 | KRISO Very Large Crude Carrier no. 2 |
| USV | Unmmanned Surface Vessels |
| VTS | Vessel Traffic Service |
| WOS | Web of Science |
| xG-Boost | eXtreme Gradient Boosting |
References
- Munim, Z.H.; Haralambides, H. Advances in maritime autonomous surface ships (MASS) in merchant shipping. Marit. Econ. Logist. 2022, 24, 181–188. [Google Scholar] [CrossRef]
- Forti, N.; d’Afflisio, E.; Braca, P.; Millefiori, L.M.; Carniel, S.; Willett, P. Next-Gen Intelligent Situational Awareness Systems for Maritime Surveillance and Autonomous Navigation [Point of View]. Proc. IEEE 2022, 110, 1532–1537. [Google Scholar] [CrossRef]
- Shi, Y.; Long, C.; Yang, X.; Deng, M. Abnormal Ship Behavior Detection Based on AIS Data. Appl. Sci. 2022, 12, 4635. [Google Scholar] [CrossRef]
- Yao, L. Research Status and Development Trend of Intelligent Ships. Int. Core J. Eng. 2019, 5, 49–57. [Google Scholar] [CrossRef]
- Chen, Q.; Lau, Y.Y.; Zhang, P.; Dulebenets, M.A.; Wang, N.; Wang, T.N. From concept to practicality: Unmanned vessel research in China. Heliyon 2023, 9, e15182. [Google Scholar] [CrossRef]
- Liu, H.; Liu, Y.; Li, B.; Qi, Z. Ship Abnormal Behavior Detection Method Based on Optimized GRU Network. J. Mar. Sci. Eng. 2022, 10, 249. [Google Scholar] [CrossRef]
- Hasanspahić, N.; Vujičić, S.; Frančić, V.; Čampara, L. The Role of the Human Factor in Marine Accidents. J. Mar. Sci. Eng. 2021, 9, 261. [Google Scholar] [CrossRef]
- Eliopoulou, E.; Alissafaki, A.; Papanikolaou, A. Statistical Analysis of Accidents and Review of Safety Level of Passenger Ships. J. Mar. Sci. Eng. 2023, 11, 410. [Google Scholar] [CrossRef]
- Pedrozo, R. Advent of a New Era in Naval Warfare: Autonomous and Unmanned Systems. In Autonomous Vessels in Maritime Affairs: Law and Governance Implications; Johansson, T.M., Fernández, J.E., Dalaklis, D., Pastra, A., Skinner, J.A., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 63–80. [Google Scholar] [CrossRef]
- Wang, J.; Xiao, Y.; Li, T.; Chen, C.L.P. A Survey of Technologies for Unmanned Merchant Ships. IEEE Access 2020, 8, 224461–224486. [Google Scholar] [CrossRef]
- Liu, J.; Yan, X.; Liu, C.; Fan, A.; Ma, F. Developments and Applications of Green and Intelligent Inland Vessels in China. J. Mar. Sci. Eng. 2023, 11, 318. [Google Scholar] [CrossRef]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- He, Z.; Liu, C.; Chu, X.; Negenborn, R.R.; Wu, Q. Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Appl. Ocean Res. 2022, 118, 102995. [Google Scholar] [CrossRef]
- Geng, X.; Li, Y.; Sun, Q. A Novel Short-Term Ship Motion Prediction Algorithm Based on EMD and Adaptive PSO–LSTM with the Sliding Window Approach. J. Mar. Sci. Eng. 2023, 11, 466. [Google Scholar] [CrossRef]
- Zhang, M.; Taimuri, G.; Zhang, J.; Hirdaris, S. A deep learning method for the prediction of 6-DoF ship motions in real conditions. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2023, 237, 147509022311578. [Google Scholar] [CrossRef]
- Lyu, H.; Hao, Z.; Li, J.; Li, G.; Sun, X.; Zhang, G.; Yin, Y.; Zhao, Y.; Zhang, L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 830. [Google Scholar] [CrossRef]
- Zaccone, R.; Martelli, M. A collision avoidance algorithm for ship guidance applications. J. Mar. Eng. Technol. 2020, 19, 62–75. [Google Scholar] [CrossRef]
- Zhou, S.; Wu, Z.; Ren, L. Ship Path Planning Based on Buoy Offset Historical Trajectory Data. J. Mar. Sci. Eng. 2022, 10, 674. [Google Scholar] [CrossRef]
- Sørensen, M.E.N.; Breivik, M.; Skjetne, R. Comparing Combinations of Linear and Nonlinear Feedback Terms for Ship Motion Control. IEEE Access 2020, 8, 193813–193826. [Google Scholar] [CrossRef]
- Skulstad, R.; Li, G.; Fossen, T.I.; Vik, B.; Zhang, H. A Hybrid Approach to Motion Prediction for Ship Docking—Integration of a Neural Network Model Into the Ship Dynamic Model. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Cheng, W.; Yan, Y.; Xia, J.; Liu, Q.; Qu, C.; Wang, Z. The Compatibility between the Pangu Weather Forecasting Model and Meteorological Operational Data. arXiv 2023, arXiv:2308.04460. [Google Scholar]
- Bi, K.; Xie, L.; Zhang, H.; Chen, X.; Gu, X.; Tian, Q. Accurate medium-range global weather forecasting with 3D neural networks. Nature 2023, 619, 533–538. [Google Scholar] [CrossRef]
- Bi, K.; Xie, L.; Zhang, H.; Chen, X.; Gu, X.; Tian, Q. Pangu-Weather: A 3D High-Resolution Model for Fast and Accurate Global Weather Forecast. arXiv 2022, arXiv:2211.02556. [Google Scholar]
- Rodger, M.; Guida, R. Classification-Aided SAR and AIS Data Fusion for Space-Based Maritime Surveillance. Remote Sens. 2021, 13, 104. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.; Guedes Soares, C. Maritime traffic probabilistic prediction based on ship motion pattern extraction. Reliab. Eng. Syst. Saf. 2022, 217, 108061. [Google Scholar] [CrossRef]
- Silva, K.M.; Maki, K.J. Data-Driven system identification of 6-DoF ship motion in waves with neural networks. Appl. Ocean Res. 2022, 125, 103222. [Google Scholar] [CrossRef]
- Schirmann, M.L.; Collette, M.D.; Gose, J.W. Data-driven models for vessel motion prediction and the benefits of physics-based information. Appl. Ocean Res. 2022, 120, 102916. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Zhang, X.; Gao, Z. A novel maritime autonomous navigation decision-making system: Modeling, integration, and real ship trial. Expert Syst. Appl. 2023, 222, 119825. [Google Scholar] [CrossRef]
- Miller, A. Model predictive ship trajectory tracking system based on line of sight method. Bull. Pol. Acad. Sci. Tech. Sci. 2023, 71, e145763. [Google Scholar] [CrossRef]
- Øveraas, H.; Halvorsen, H.S.; Landstad, O.; Smines, V.; Johansen, T.A. Dynamic Positioning Using Model Predictive Control With Short-Term Wave Prediction. IEEE J. Ocean. Eng. 2023, 48, 1065–1077. [Google Scholar] [CrossRef]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; Vallet Garcia, J.M.; Malkamaki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Sarkka, S.; et al. Sensors and AI Techniques for Situational Awareness in Autonomous Ships: A Review. IEEE Trans. Intell. Transport. Syst. 2022, 23, 64–83. [Google Scholar] [CrossRef]
- Naus, K.; Wąż, M.; Szymak, P.; Gucma, L.; Gucma, M. Assessment of ship position estimation accuracy based on radar navigation mark echoes identified in an Electronic Navigational Chart. Measurement 2021, 169, 108630. [Google Scholar] [CrossRef]
- Blindheim, S.; Johansen, T.A. Electronic Navigational Charts for Visualization, Simulation, and Autonomous Ship Control. IEEE Access 2022, 10, 3716–3737. [Google Scholar] [CrossRef]
- Zhang, M.; Kujala, P.; Hirdaris, S. A machine learning method for the evaluation of ship grounding risk in real operational conditions. Reliab. Eng. Syst. Saf. 2022, 226, 108697. [Google Scholar] [CrossRef]
- Xue, H.; Qian, K. Ship collision avoidance based on brain storm optimization near offshore wind farm. Ocean Eng. 2023, 268, 113433. [Google Scholar] [CrossRef]
- Shi, B. Obstacles modeling method in cluttered environments using satellite images and its application to path planning for USV. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 202–210. [Google Scholar] [CrossRef]
- Vettor, R.; Guedes Soares, C. Reflecting the uncertainties of ensemble weather forecasts on the predictions of ship fuel consumption. Ocean Eng. 2022, 250, 111009. [Google Scholar] [CrossRef]
- Chen, C. Case study on wave-current interaction and its effects on ship navigation. J. Hydrodyn. 2018, 30, 411–419. [Google Scholar] [CrossRef]
- Zwolan, P.; Czaplewski, K. Sea waves models used in maritime simulators. Zesz. Nauk. Akad. Morska W Szczecinie 2012, 32, 186–190. [Google Scholar]
- Bingham, B.; Agüero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward Maritime Robotic Simulation in Gazebo. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Inazu, D.; Ikeya, T.; Waseda, T.; Hibiya, T.; Shigihara, Y. Measuring offshore tsunami currents using ship navigation records. Prog. Earth Planet. Sci. 2018, 5, 38. [Google Scholar] [CrossRef]
- Yu, X.; Liu, Y.; Sun, Z.; Qin, P. Wavelet-Based ResNet: A Deep-Learning Model for Prediction of Significant Wave Height. IEEE Access 2022, 10, 110026–110033. [Google Scholar] [CrossRef]
- Remya, P.; Kumar, R.; Basu, S. Forecasting tidal currents from tidal levels using genetic algorithm. Ocean Eng. 2012, 40, 62–68. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Su, W. A Combined Prognostic Model Based on Machine Learning for Tidal Current Prediction. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3108–3114. [Google Scholar] [CrossRef]
- Chen, C.; Shiotani, S.; Sasa, K. Numerical ship navigation based on weather and ocean simulation. Ocean Eng. 2013, 69, 44–53. [Google Scholar] [CrossRef]
- Lou, R.; Lv, Z.; Dang, S.; Su, T.; Li, X. Application of machine learning in ocean data. In Multimedia Systems; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1–10. [Google Scholar]
- Isozaki, I.; Uji, T. Numerical prediction of ocean wind waves. Pap. Met. Geophys. 1973, 24, 207–231. [Google Scholar] [CrossRef] [PubMed]
- Saruwatari, A.; Yoneko, Y.; Tajima, Y. Effects of wave, tidal current and ocean current coexistence on the wave and current predictions in the tsugaru strait. Coast. Eng. Proc. 2014, 34, 42. [Google Scholar] [CrossRef][Green Version]
- Group, T.W. The WAM model—A third generation ocean wave prediction model. J. Phys. Oceanogr. 1988, 18, 1775–1810. [Google Scholar] [CrossRef]
- Xie, C.; Chen, P.; Man, T.; Dong, J. STCANet: Spatiotemporal Coupled Attention Network for Ocean Surface Current Prediction. J. Ocean Univ. China 2023, 22, 441–451. [Google Scholar] [CrossRef]
- Thongniran, N.; Vateekul, P.; Jitkajornwanich, K.; Lawawirojwong, S.; Srestasathiern, P. Spatio-Temporal Deep Learning for Ocean Current Prediction Based on HF Radar Data. In Proceedings of the 2019 16th International Joint Conference on Computer Science and Software Engineering (JCSSE), Chonburi, Thailand, 10–12 July 2019; pp. 254–259. [Google Scholar] [CrossRef]
- Balogun, A.L.; Adebisi, N. Sea level prediction using ARIMA, SVR and LSTM neural network: Assessing the impact of ensemble Ocean-Atmospheric processes on models’ accuracy. Geomat. Nat. Hazards Risk 2021, 12, 653–674. [Google Scholar] [CrossRef]
- Karevan, Z.; Suykens, J.A. Transductive LSTM for time-series prediction: An application to weather forecasting. Neural Netw. 2020, 125, 1–9. [Google Scholar] [CrossRef]
- Chhetri, M.; Kumar, S.; Pratim Roy, P.; Kim, B.G. Deep BLSTM-GRU Model for Monthly Rainfall Prediction: A Case Study of Simtokha, Bhutan. Remote Sens. 2020, 12, 3174. [Google Scholar] [CrossRef]
- Jain, G. A Study of Time Series Models ARIMA and ETS. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=2898968 (accessed on 22 September 2023).
- Duan, J.; Chang, M.; Chen, X.; Wang, W.; Zuo, H.; Bai, Y.; Chen, B. A combined short-term wind speed forecasting model based on CNN–RNN and linear regression optimization considering error. Renew. Energy 2022, 200, 788–808. [Google Scholar] [CrossRef]
- Xu, W.; Wu, S. Ship Agent model for traffic flow simulation in inland waterway. IOP Conf. Ser. Mater. Sci. Eng. 2020, 768, 072104. [Google Scholar] [CrossRef]
- Goerlandt, F.; Kujala, P. Traffic simulation based ship collision probability modeling. Reliab. Eng. Syst. Saf. 2011, 96, 91–107. [Google Scholar] [CrossRef]
- Wolsing, K.; Roepert, L.; Bauer, J.; Wehrle, K. Anomaly Detection in Maritime AIS Tracks: A Review of Recent Approaches. J. Mar. Sci. Eng. 2022, 10, 112. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Zhou, Z.; Zhao, J.; Wang, S.; Chen, X. Extracting Vessel Speed Based on Machine Learning and Drone Images during Ship Traffic Flow Prediction. J. Adv. Transp. 2022, 2022, 3048611. [Google Scholar] [CrossRef]
- Yan, Z.; Song, X.; Zhong, H.; Yang, L.; Wang, Y. Ship Classification and Anomaly Detection Based on Spaceborne AIS Data Considering Behavior Characteristics. Sensors 2022, 22, 7713. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Guo, J.; Li, R.; Wang, Y.; Li, Z.; Miu, K.; Chen, H. The Abnormal Detection Method of Ship Trajectory with Adaptive Transformer Model Based on Migration Learning. In Proceedings of the Spatial Data and Intelligence, Nanchang, China, 13–15 April 2023; Meng, X., Li, X., Xu, J., Zhang, X., Fang, Y., Zheng, B., Li, Y., Eds.; Springer Nature: Cham, Switzerland, 2023; pp. 204–220. [Google Scholar]
- Itoh, H. Method for prediction of ship traffic behaviour and encounter frequency. J. Navig. 2022, 75, 106–123. [Google Scholar] [CrossRef]
- Han, X.; Armenakis, C.; Jadidi, M. Modeling Vessel Behaviours by Clustering AIS Data Using Optimized DBSCAN. Sustainability 2021, 13, 8162. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Yin, J.C.; Wang, N.N.; Hui, Z.G. Vessel traffic flow analysis and prediction by an improved PSO-BP mechanism based on AIS data. Evol. Syst. 2019, 10, 397–407. [Google Scholar] [CrossRef]
- Li, Y.; Ren, H. Vessel Traffic Flow Prediction Using LSTM Encoder-Decoder. In Proceedings of the 2022 5th International Conference on Signal Processing and Machine Learning, Dalian, China, 4–6 August 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Li, M.; Li, B.; Qi, Z.; Li, J.; Wu, J. Optimized APF-ACO Algorithm for Ship Collision Avoidance and Path Planning. J. Mar. Sci. Eng. 2023, 11, 1177. [Google Scholar] [CrossRef]
- He, Q.; Hou, Z.; Zhu, X. A Novel Algorithm for Ship Route Planning Considering Motion Characteristics and ENC Vector Maps. J. Mar. Sci. Eng. 2023, 11, 1102. [Google Scholar] [CrossRef]
- He, G.; Dong, G.; Yao, C.; Sun, X. Real-Time Deterministic Prediction of Ship Motion Based on Multi-Layer LSTM. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Melbourne, Australia, 11–16 June 2023; Volume 7: CFD & FSI. Available online: https://asmedigitalcollection.asme.org/OMAE/proceedings-pdf/OMAE2023/86892/V007T08A023/7041468/v007t08a023-omae2023-102195.pdf (accessed on 22 September 2023).
- Li, H.; Jiao, H.; Yang, Z. AIS data-driven ship trajectory prediction modelling and analysis based on machine learning and deep learning methods. Transp. Res. Part E Logist. Transp. Rev. 2023, 175, 103152. [Google Scholar] [CrossRef]
- Tzeng, C.Y.; Chen, J.F. Fundamental properties of linear ship steering dynamic models. J. Mar. Sci. Technol. 2009, 7, 2. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Measurement of Hydrodynamic Characteristics from Ship Maneuvering Trials by System Identification; Technical Report; 1980. Available online: https://trid.trb.org/view/157366 (accessed on 22 September 2023).
- Nomoto, K.; Taguchi, K. On steering qualities of ships (2). J. Zosen Kiokai 1957, 1957, 57–66. [Google Scholar] [CrossRef] [PubMed]
- Yoshimura, Y.; Nomoto, K. Modeling of manoeuvring behaviour of ships with a propeller idling, boosting and reversing. J. Soc. Nav. Archit. Jpn. 1978, 1978, 57–69. [Google Scholar] [CrossRef] [PubMed]
- Nomoto, K.; Taguchi, K.; Honda, K.; Hirano, S. On the steering qualities of ships. J. Zosen Kiokai 1956, 1956, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Khattab, O.M.; Nomoto, K. Steering Control of a Ship in a Canal (Part I). In Journal of the Kansai Society of Naval Architects, Japan 169; The Japan Society of Naval Architects and Ocean Engineers: Tokyo, Japan, 1978; pp. 41–55. [Google Scholar]
- Lang, X.; Wu, D.; Mao, W. Comparison of supervised machine learning methods to predict ship propulsion power at sea. Ocean Eng. 2022, 245, 110387. [Google Scholar] [CrossRef]
- Karagiannidis, P.; Themelis, N. Data-driven modelling of ship propulsion and the effect of data pre-processing on the prediction of ship fuel consumption and speed loss. Ocean Eng. 2021, 222, 108616. [Google Scholar] [CrossRef]
- Cheliotis, M.; Lazakis, I.; Theotokatos, G. Machine learning and data-driven fault detection for ship systems operations. Ocean Eng. 2020, 216, 107968. [Google Scholar] [CrossRef]
- Wang, T.; Li, G.; Hatledal, L.I.; Skulstad, R.; AEsoy, V.; Zhang, H. Incorporating Approximate Dynamics Into Data-Driven Calibrator: A Representative Model for Ship Maneuvering Prediction. IEEE Trans. Ind. Inf. 2022, 18, 1781–1789. [Google Scholar] [CrossRef]
- Hu, J.H.; Hu, D.B.; Xiao, J.B. Model parameter identification and simulation of ship power system based on recursive least squares method. In Proceedings of the Applied Mechanics and Materials, Sydney, NSW, Australia, 11–14 December 2012; Trans Tech Publications: Wollerau, Switzerland, 2012; Volume 220, pp. 482–486. [Google Scholar]
- Jian-Chuan, Y.; Zao-Jian, Z.; Feng, X. Parametric identification of Abkowitz model for ship maneuvering motion by using partial least squares regression. J. Offshore Mech. Arct. Eng. 2015, 137, 031301. [Google Scholar] [CrossRef]
- Shi, C.; Zhao, D.; Peng, J.; Shen, C. Identification of ship maneuvering model using extended Kalman filters. In Marine Navigation and Safety of Sea Transportation; CRC Press: Boca Raton, FL, USA, 2009; pp. 355–360. [Google Scholar]
- Dong, Z.; Yang, X.; Zheng, M.; Song, L.; Mao, Y. Parameter identification of unmanned marine vehicle manoeuvring model based on extended Kalman filter and support vector machine. Int. J. Adv. Robot. Syst. 2019, 16, 1729881418825095. [Google Scholar] [CrossRef]
- Wang, T.; Li, G.; Wu, B.; Æsøy, V.; Zhang, H. Parameter identification of ship manoeuvring model under disturbance using support vector machine method. Ships Offshore Struct. 2021, 16, 13–21. [Google Scholar] [CrossRef]
- Luo, W.; Zou, Z. Parametric identification of ship maneuvering models by using support vector machines. J. Ship Res. 2009, 53, 19–30. [Google Scholar] [CrossRef]
- Luo, W.; Zhang, Z. Modeling of ship maneuvering motion using neural networks. J. Mar. Sci. Appl. 2016, 15, 426–432. [Google Scholar] [CrossRef]
- Xing, Z.; McCue, L. Parameter identification for two nonlinear models of ship rolling using neural networks. In Proceedings of the 10th International Conference on Stability of Ships and Ocean Vehicles, St. Petersburg, Russia, 21–26 June 2009; pp. 421–428. [Google Scholar]
- Alexandersson, M.; Zhang, D.; Mao, W.; Ringsberg, J.W. A comparison of ship manoeuvrability models to approximate ship navigation trajectories. Ships Offshore Struct. 2022, 18, 550–557. [Google Scholar] [CrossRef]
- Chen, L.; Yang, P.; Li, S.; Tian, Y.; Liu, G.; Hao, G. Grey-box identification modeling of ship maneuvering motion based on LS-SVM. Ocean Eng. 2022, 266, 112957. [Google Scholar] [CrossRef]
- Xu, H.; Hinostroza, M.; Hassani, V.; Guedes Soares, C. Real-time parameter estimation of a nonlinear vessel steering model using a support vector machine. J. Offshore Mech. Arct. Eng. 2019, 141, 061606. [Google Scholar] [CrossRef]
- Luo, W.; Guedes Soares, C.; Zou, Z. Parameter identification of ship maneuvering model based on support vector machines and particle swarm optimization. J. Offshore Mech. Arct. Eng. 2016, 138, 031101. [Google Scholar] [CrossRef]
- Chen, Y.; Song, Y.; Chen, M. Parameters identification for ship motion model based on particle swarm optimization. Kybernetes 2010, 39, 871–880. [Google Scholar] [CrossRef]
- Ding, F. Several multi-innovation identification methods. Digit. Signal Process. 2010, 20, 1027–1039. [Google Scholar] [CrossRef]
- Xie, S.; Chu, X.; Liu, C.; Liu, J.; Mou, J. Parameter identification of ship motion model based on multi-innovation methods. J. Mar. Sci. Technol. 2020, 25, 162–184. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; Im, N.; Zhang, W.; Li, X. Real-time parameter identification of ship maneuvering response model based on nonlinear Gaussian Filter. Ocean Eng. 2022, 247, 110471. [Google Scholar] [CrossRef]
- Luo, W.; Guedes Soares, C.; Zou, Z. Parameter identification of ship manoeuvring model based on particle swarm optimization and support vector machines. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Nantes, France, 9–14 June 2013; American Society of Mechanical Engineers: New York, NY, USA, 2013; Volume 55393, p. V005T06A071. [Google Scholar]
- Liu, S.; Song, J.; Li, B.; Li, G. Investigation of steering dynamics ship model identification based on pso-lssvr. In Proceedings of the 2008 2nd International Symposium on Systems and Control in Aerospace and Astronautics, Shenzhen, China, 10–12 December 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–6. [Google Scholar]
- Li, Z.; Sun, J. Disturbance Compensating Model Predictive Control With Application to Ship Heading Control. IEEE Trans. Contr. Syst. Technol. 2011, 20, 5713831. [Google Scholar] [CrossRef]
- Gao, S.; Liu, L.; Wang, H.; Wang, A. Data-driven model-free resilient speed control of an autonomous surface vehicle in the presence of actuator anomalies. ISA Trans. 2022, 127, 251–258. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.F.; Han, C.B.; Cheng, H.X.; Cheng, C.; Ge, T. A Physics-Informed Neural Network for the Prediction of Unmanned Surface Vehicle Dynamics. J. Mar. Sci. Eng. 2022, 10, 148. [Google Scholar] [CrossRef]
- Song, L.; Hao, L.; Tao, H.; Xu, C.; Guo, R.; Li, Y.; Yao, J. Research on Black-Box Modeling Prediction of USV Maneuvering Based on SSA-WLS-SVM. J. Mar. Sci. Eng. 2023, 11, 324. [Google Scholar] [CrossRef]
- Wang, L.; Li, S.; Liu, J.; Wu, Q. Data-driven model identification and predictive control for path-following of underactuated ships with unknown dynamics. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100445. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, P.; Peng, Y.; Liu, D. Roll Motion Prediction of Unmanned Surface Vehicle Based on Coupled CNN and LSTM. Future Internet 2019, 11, 243. [Google Scholar] [CrossRef]
- Zhang, D.; Chu, X.; Wu, W.; He, Z.; Wang, Z.; Liu, C. Model identification of ship turning maneuver and extreme short-term trajectory prediction under the influence of sea currents. Ocean Eng. 2023, 278, 114367. [Google Scholar] [CrossRef]
- Xue, D.; Wu, D.; Yamashita, A.S.; Li, Z. Proximal policy optimization with reciprocal velocity obstacle based collision avoidance path planning for multi-unmanned surface vehicles. Ocean Eng. 2023, 273, 114005. [Google Scholar] [CrossRef]
- Xie, S.; Chu, X.; Zheng, M.; Liu, C. Ship predictive collision avoidance method based on an improved beetle antennae search algorithm. Ocean Eng. 2019, 192, 106542. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, S.; Jin, E.S. Collision avoidance based on predictive probability using Kalman filter. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100438. [Google Scholar] [CrossRef]
- Zhang, M.; Hao, S.; Wu, D.; Chen, M.L.; Yuan, Z.M. Time-optimal obstacle avoidance of autonomous ship based on nonlinear model predictive control. Ocean Eng. 2022, 266, 112591. [Google Scholar] [CrossRef]
- He, Z.; Chu, X.; Liu, C.; Wu, W. A novel model predictive artificial potential field based ship motion planning method considering COLREGs for complex encounter scenarios. ISA Trans. 2023, 134, 58–73. [Google Scholar] [CrossRef] [PubMed]
- Bao, K.; Bi, J.; Gao, M.; Sun, Y.; Zhang, X.; Zhang, W. An Improved Ship Trajectory Prediction Based on AIS Data Using MHA-BiGRU. J. Mar. Sci. Eng. 2022, 10, 804. [Google Scholar] [CrossRef]
- Nowy, A.; Łazuga, K.; Gucma, L.; Androjna, A.; Perkovič, M.; Srše, J. Modeling of Vessel Traffic Flow for Waterway Design–Port of Świnoujście Case Study. Appl. Sci. 2021, 11, 8126. [Google Scholar] [CrossRef]
- Alizadeh, D.; Alesheikh, A.A.; Sharif, M. Vessel Trajectory Prediction Using Historical Automatic Identification System Data. J. Navig. 2021, 74, 156–174. [Google Scholar] [CrossRef]
- Jiang, D.; Shi, G.; Li, N.; Ma, L.; Li, W.; Shi, J. TRFM-LS: Transformer-Based Deep Learning Method for Vessel Trajectory Prediction. J. Mar. Sci. Eng. 2023, 11, 880. [Google Scholar] [CrossRef]
- Ma, H.; Zuo, Y.; Li, T. Vessel Navigation Behavior Analysis and Multiple-Trajectory Prediction Model Based on AIS Data. J. Adv. Transp. 2022, 2022, 6622862. [Google Scholar] [CrossRef]
- Lin, Z.; Yue, W.; Huang, J.; Wan, J. Ship Trajectory Prediction Based on the TTCN-Attention-GRU Model. Electronics 2023, 12, 2556. [Google Scholar] [CrossRef]
- Bejarano, G.; Manzano, J.M.; Salvador, J.R.; Limon, D. Nonlinear model predictive control-based guidance law for path following of unmanned surface vehicles. Ocean Eng. 2022, 258, 111764. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Peng, H.; Qie, X.; Zhao, X.; Lu, C. A Simultaneous Planning and Control Method Integrating APF and MPC to Solve Autonomous Navigation for USVs in Unknown Environments. J. Intell. Robot. Syst. 2022, 105, 36. [Google Scholar] [CrossRef]
- Chen, L.; Yang, P.; Li, S.; Liu, K.; Wang, K.; Zhou, X. Online modeling and prediction of maritime autonomous surface ship maneuvering motion under ocean waves. Ocean Eng. 2023, 276, 114183. [Google Scholar] [CrossRef]
- Asfihani, T.; Chotimah, K.; Fitria, I.; Subchan. Ship Heading Control Using Nonlinear Model Predictive Control. In Proceedings of the 2020 3rd International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 10 December 2020; pp. 306–309. [Google Scholar] [CrossRef]
- Lazarowska, A. Review of Collision Avoidance and Path Planning Methods for Ships Utilizing Radar Remote Sensing. Remote Sens. 2021, 13, 3265. [Google Scholar] [CrossRef]
- Abebe, M.; Noh, Y.; Kang, Y.J.; Seo, C.; Kim, D.; Seo, J. Ship trajectory planning for collision avoidance using hybrid ARIMA-LSTM models. Ocean Eng. 2022, 256, 111527. [Google Scholar] [CrossRef]
- Thyri, E.H.; Breivik, M. Collision avoidance for ASVs through trajectory planning: MPC with COLREGs-compliant nonlinear constraints. MIC 2022, 43, 55–77. [Google Scholar] [CrossRef]
- Akdağ, M.; Fossen, T.I.; Johansen, T.A. Collaborative Collision Avoidance for Autonomous Ships Using Informed Scenario-Based Model Predictive Control. IFAC-PapersOnLine 2022, 55, 249–256. [Google Scholar] [CrossRef]
- Gao, P.; Zhou, L.; Zhao, X.; Shao, B. Research on ship collision avoidance path planning based on modified potential field ant colony algorithm. Ocean. Coast. Manag. 2023, 235, 106482. [Google Scholar] [CrossRef]
- Zhu, H.; Ding, Y. Optimized Dynamic Collision Avoidance Algorithm for USV Path Planning. Sensors 2023, 23, 4567. [Google Scholar] [CrossRef]
- Du, Y.; Meng, Q.; Wang, S.; Kuang, H. Two-phase optimal solutions for ship speed and trim optimization over a voyage using voyage report data. Transp. Res. Part B Methodol. 2019, 122, 88–114. [Google Scholar] [CrossRef]
- Yu, H.; Fang, Z.; Fu, X.; Liu, J.; Chen, J. Literature review on emission control-based ship voyage optimization. Transp. Res. Part D Transp. Environ. 2021, 93, 102768. [Google Scholar] [CrossRef]
- Wang, Y.; Meng, Q.; Kuang, H. Jointly optimizing ship sailing speed and bunker purchase in liner shipping with distribution-free stochastic bunker prices. Transp. Res. Part C Emerg. Technol. 2018, 89, 35–52. [Google Scholar] [CrossRef]
- Li, X.; Sun, B.; Guo, C.; Du, W.; Li, Y. Speed optimization of a container ship on a given route considering voluntary speed loss and emissions. Appl. Ocean Res. 2020, 94, 101995. [Google Scholar] [CrossRef]
- James, R.W. Application of Wave Forecasts to Marine Navigation; New York University: New York, NY, USA, 1957. [Google Scholar]
- Wang, H.; Mao, W.; Eriksson, L. A Three-Dimensional Dijkstra’s algorithm for multi-objective ship voyage optimization. Ocean Eng. 2019, 186, 106131. [Google Scholar] [CrossRef]
- Zis, T.P.; Psaraftis, H.N.; Ding, L. Ship weather routing: A taxonomy and survey. Ocean Eng. 2020, 213, 107697. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, H.; Shen, Z.; Lv, H. Ship weather routing based on modified Dijkstra algorithm. In Proceedings of the 2016 6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer, Tianjin, China, 11– 12 June 2016; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 696–699. [Google Scholar]
- Ma, W.; Han, Y.; Tang, H.; Ma, D.; Zheng, H.; Zhang, Y. Ship route planning based on intelligent mapping swarm optimization. Comput. Ind. Eng. 2023, 176, 108920. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Zhou, F.; Liu, R.W.; Xiong, N. A robust GA/PSO-hybrid algorithm in intelligent shipping route planning systems for maritime traffic networks. J. Internet Technol. 2018, 19, 1635–1644. [Google Scholar]
- Jang, D.u.; Kim, J.s. Development of Ship Route-Planning Algorithm Based on Rapidly-Exploring Random Tree (RRT*) Using Designated Space. J. Mar. Sci. Eng. 2022, 10, 1800. [Google Scholar] [CrossRef]
- Wang, H.; Lang, X.; Mao, W. Voyage optimization combining genetic algorithm and dynamic programming for fuel/emissions reduction. Transp. Res. Part D Transp. Environ. 2021, 90, 102670. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, Y.; Zhang, Z.; Wang, H. Multicriteria ship route planning method based on improved particle swarm optimization–genetic algorithm. J. Mar. Sci. Eng. 2021, 9, 357. [Google Scholar] [CrossRef]
- Moreira, L.; Vettor, R.; Guedes Soares, C. Neural network approach for predicting ship speed and fuel consumption. J. Mar. Sci. Eng. 2021, 9, 119. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, L.; Wu, W.; Jiao, Y. Application of improved Dijkstra algorithm in intelligent ship path planning. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4926–4931. [Google Scholar]
- Yoo, B.; Kim, J. Path optimization for marine vehicles in ocean currents using reinforcement learning. J. Mar. Sci. Technol. 2016, 21, 334–343. [Google Scholar] [CrossRef]
- Shah, B.C.; Gupta, S.K. Long-Distance Path Planning for Unmanned Surface Vehicles in Complex Marine Environment. IEEE J. Ocean Eng. 2020, 45, 813–830. [Google Scholar] [CrossRef]
- Vagale, A.; Oucheikh, R.; Bye, R.T.; Osen, O.L.; Fossen, T.I. Path planning and collision avoidance for autonomous surface vehicles I: A review. J. Mar. Sci. Technol. 2021, 26, 1292–1306. [Google Scholar] [CrossRef]
- Guo, W.; Tang, G.; Zhao, F.; Wang, Q. Global Dynamic Path Planning Algorithm for USV Based on Improved Bidirectional RRT. In Proceedings of the 32nd International Ocean and Polar Engineering Conference, Shanghai, China, 5 June 2022; p. ISOPE–I–22–547. [Google Scholar]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-art research on motion control of maritime autonomous surface ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef]
- Kim, D.; Kim, J.S.; Kim, J.H.; Im, N.K. Development of ship collision avoidance system and sea trial test for autonomous ship. Ocean Eng. 2022, 266, 113120. [Google Scholar] [CrossRef]
- Tengesdal, T.; Johansen, T.A.; Brekke, E.F. Ship Collision Avoidance Utilizing the Cross-Entropy Method for Collision Risk Assessment. IEEE Trans. Intell. Transport. Syst. 2022, 23, 11148–11161. [Google Scholar] [CrossRef]
- Lee, M.C.; Nieh, C.Y.; Kuo, H.C.; Huang, J.C. A collision avoidance method for multi-ship encounter situations. J. Mar. Sci. Technol. 2020, 25, 925–942. [Google Scholar] [CrossRef]
- Seo, C.; Noh, Y.; Abebe, M.; Kang, Y.J.; Park, S.; Kwon, C. Ship collision avoidance route planning using CRI-based A* algorithm. Int. J. Nav. Archit. Ocean Eng. 2023, 15, 100551. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).