Linear Longitudinal Strength Analysis of a Multipurpose Cargo Ship under Combined Bending and Torsional Load

Abstract
:1. Introduction
1.1. Classical Beam Theory
- The cross-section is infinitely stiff in its own plane.
- The cross-section remains plain after deformation.
- The cross-section stays parallel to the bent axis of the beam.
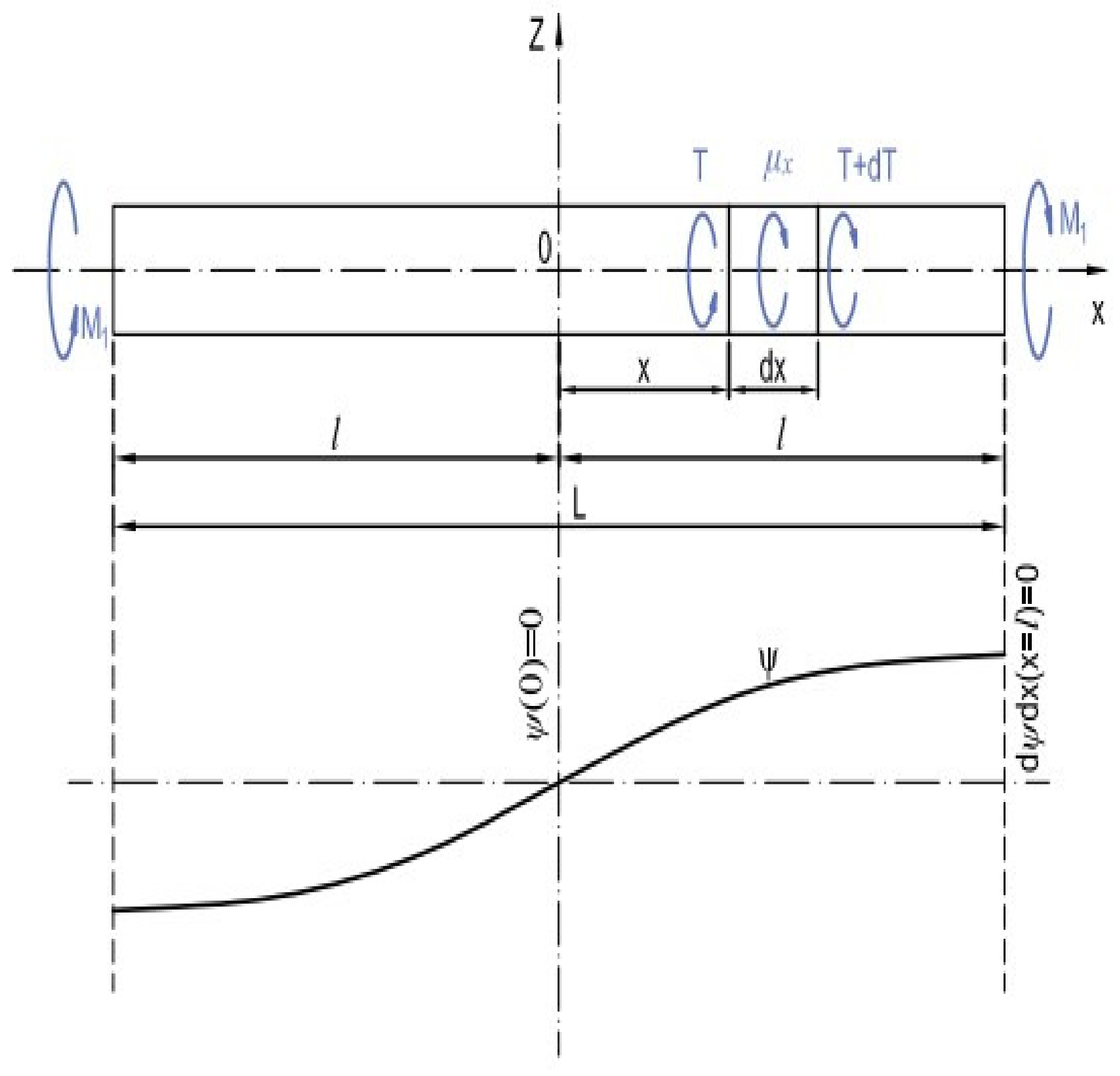
1.2. Theory of Torsion of Thin Wall Prismatic Beam
- (1)
- In its plane, the cross-section’s shape and all of its geometrical dimensions remain unchanged.
- (2)
- Transverse stresses across the cross-section of the beam are constant.
- (3)
- At any point along the beam wall, the ratio of wall thickness to the curvature radius is very close to unity.
2. Analysed Ship within the Study
Geometry and Scantling Details
3. Cargo Hold Structural Analysis
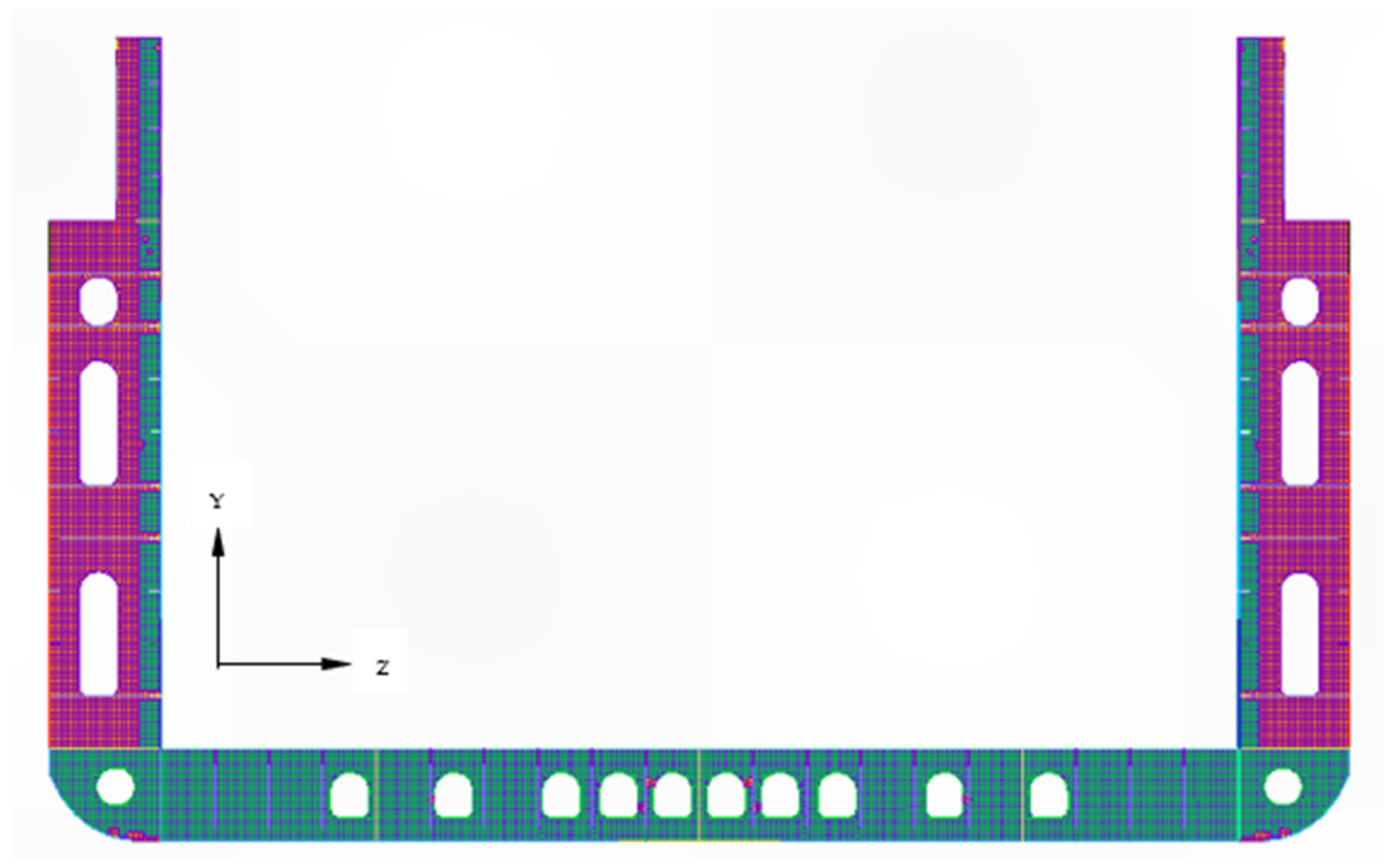
3.1. Coordinate System
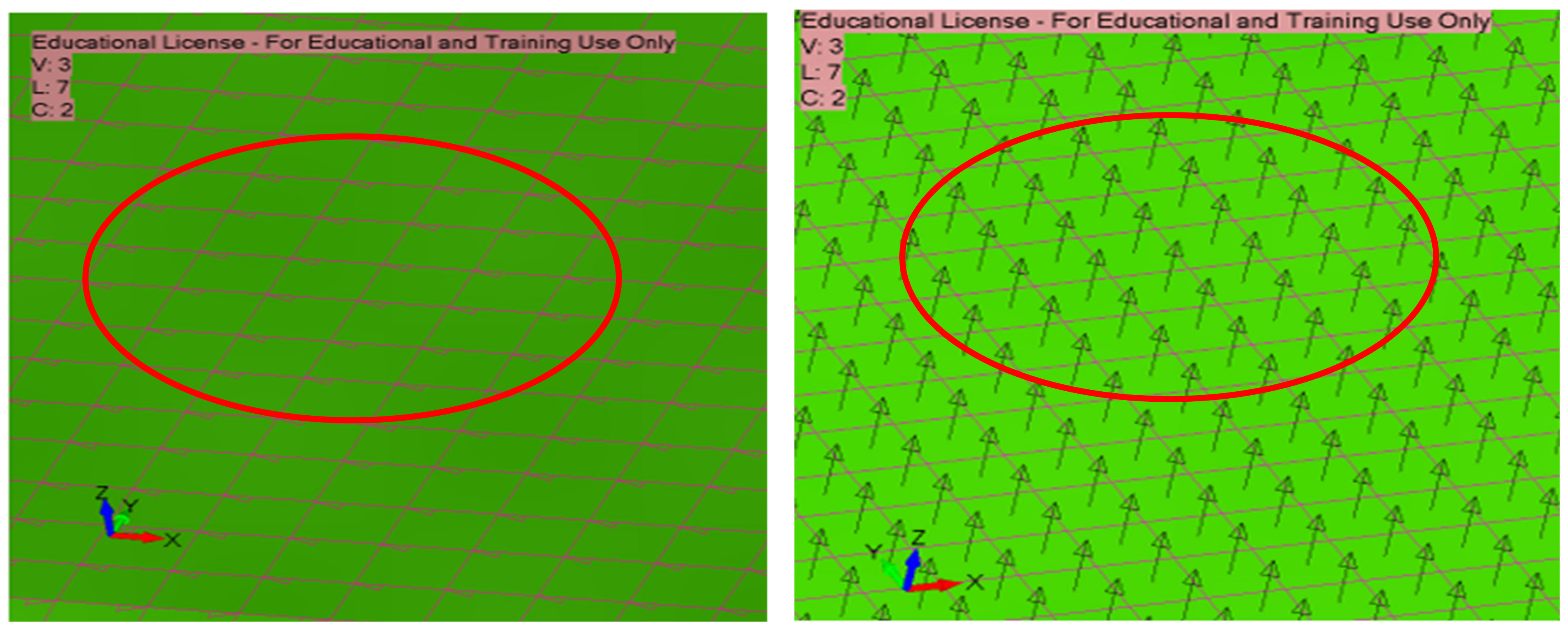
Modelling and Mesh Characteristics
- The quadrilateral elements must have an aspect ratio of no more than 4.
- The angles of the quadrilateral elements must be between 60 degrees and 120 degrees.
- The angles of the triangle elements must be between 30 degrees and 120 degrees.
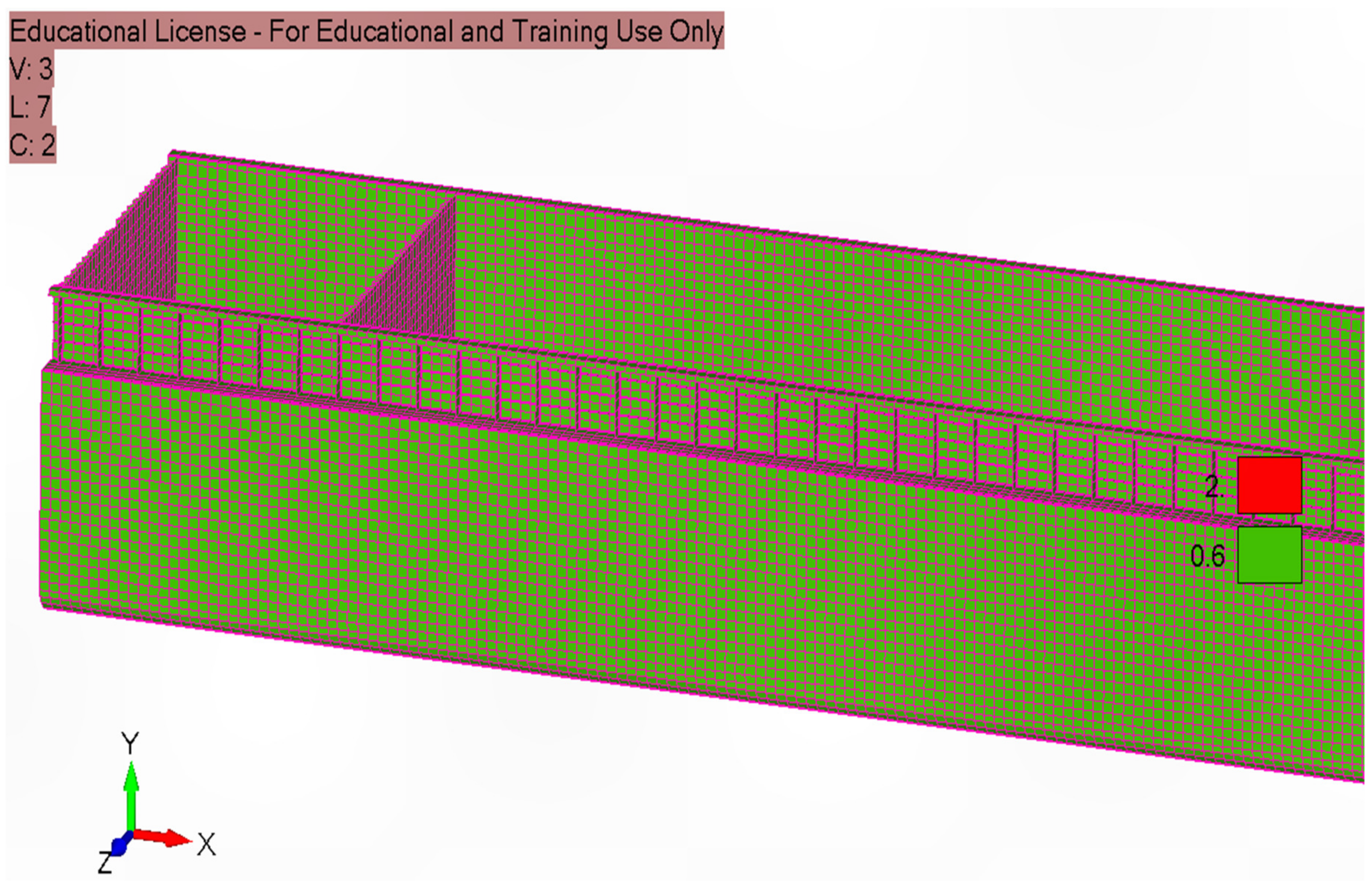
3.2. Structural Model
- Geometry creation;
- Application of meshing and boundary conditions;
- Solution; and
- Examination of the findings.
- One shell element between each stiffener
- At least three elements across the depth of girders, floors, web frames, and stringers
- Eccentric beams are used to represent all stiffeners.
3.3. Design Loads
3.3.1. Hull Girder Loads
Still Water Bending Moments (SWBMs)
Vertical Wave Bending Moment (VWBM)
Horizontal Wave Bending Moment (HWBM)
Wave—Induced Torsional Moment
3.3.2. Load Cases
- Upright ship condition.
- 2.
- Inclined ship condition.
3.4. Global Strength Analysis
- Container ships have substantial deck openings that are susceptible to overall torsional deformation and stress responses.
- Some types of ships, such as Ro-Ro ships and vehicle carriers, do not have transverse bulkheads running along the length of the ship, or they may have limited bulkheads.
- On large passenger ships, there may be a partially functional superstructure or top hull girder [29].
3.4.1. Checking Criteria
3.4.2. Boundary Conditions
- Constraint: A rigid element was applied at the model’s aft with zero degrees of freedom to clamp.
- Moment: To establish a hogging/sagging condition, a bending moment was applied in the positive y-direction to a rigid element in the fore part of the model [32].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boundary Conditions | Translations in Directions | Rotation Around Axes | ||||
|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |
| The node at the aft end | Fixed | Fixed | Fixed | Fixed | Fixed | Fixed |
| The node at the fore end | Free | Free | Free | Free | Free | Free |
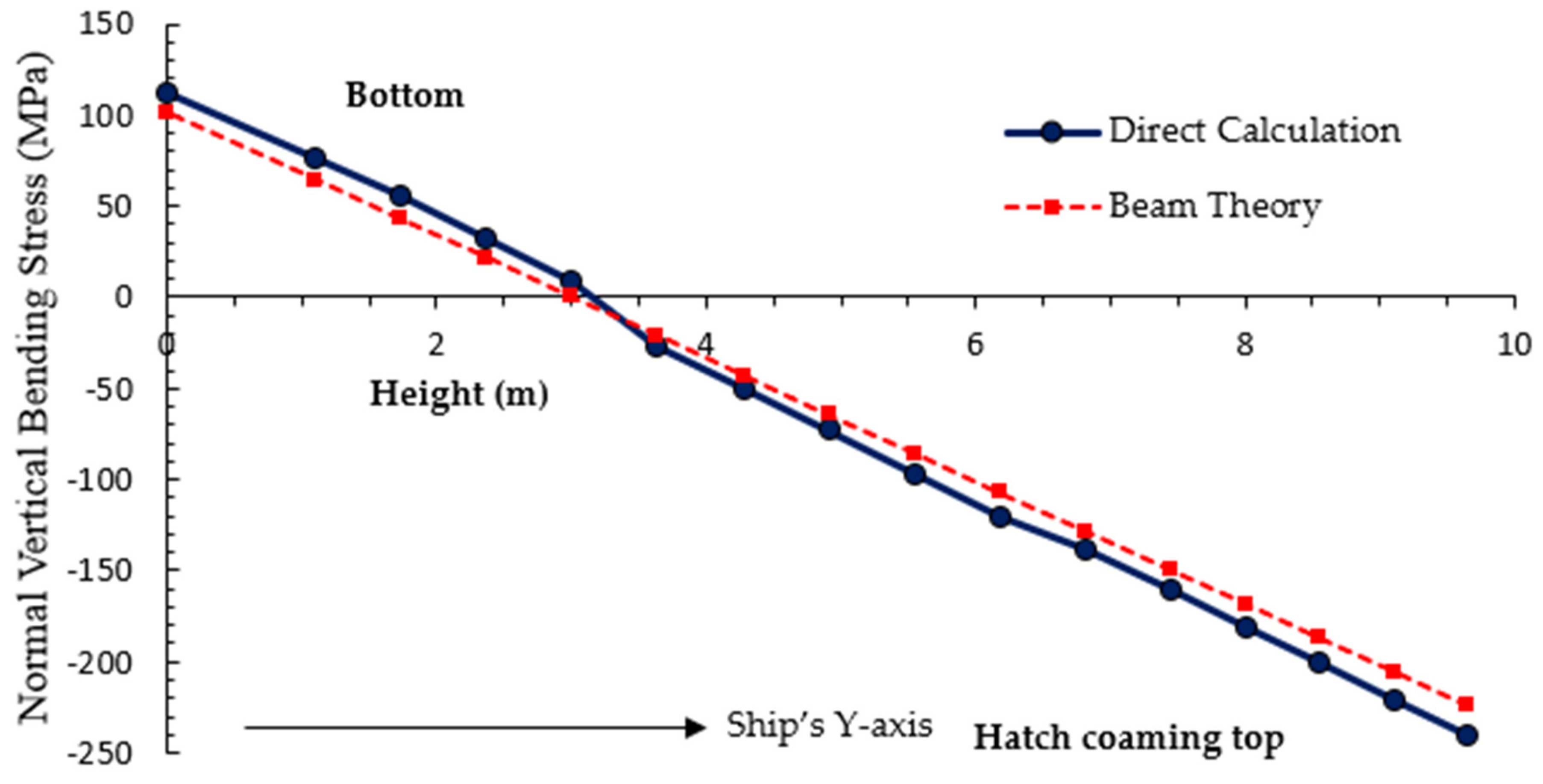
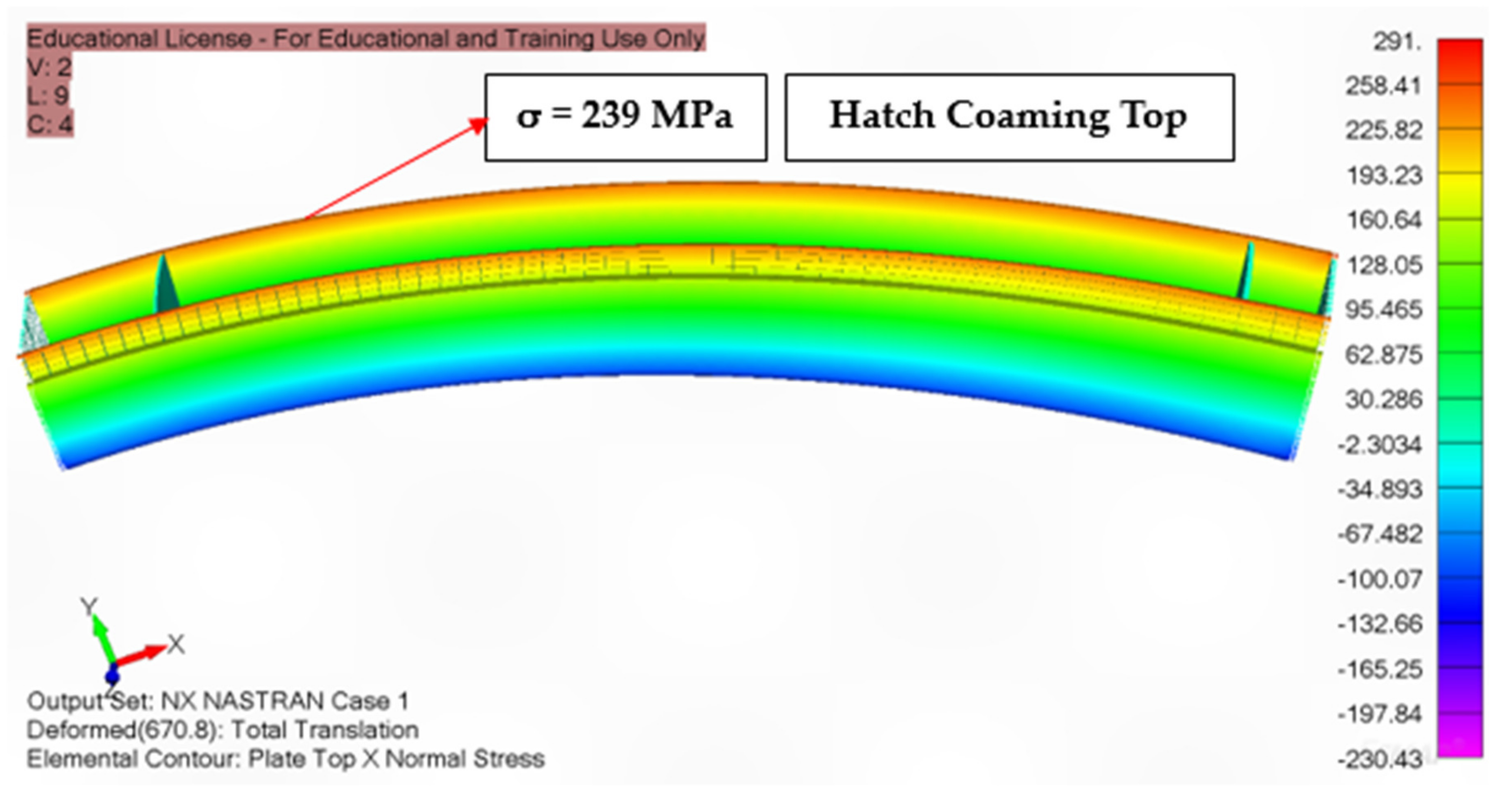
3.4.3. Analysed Ship Structural Analysis—Upright (Head Sea) Condition
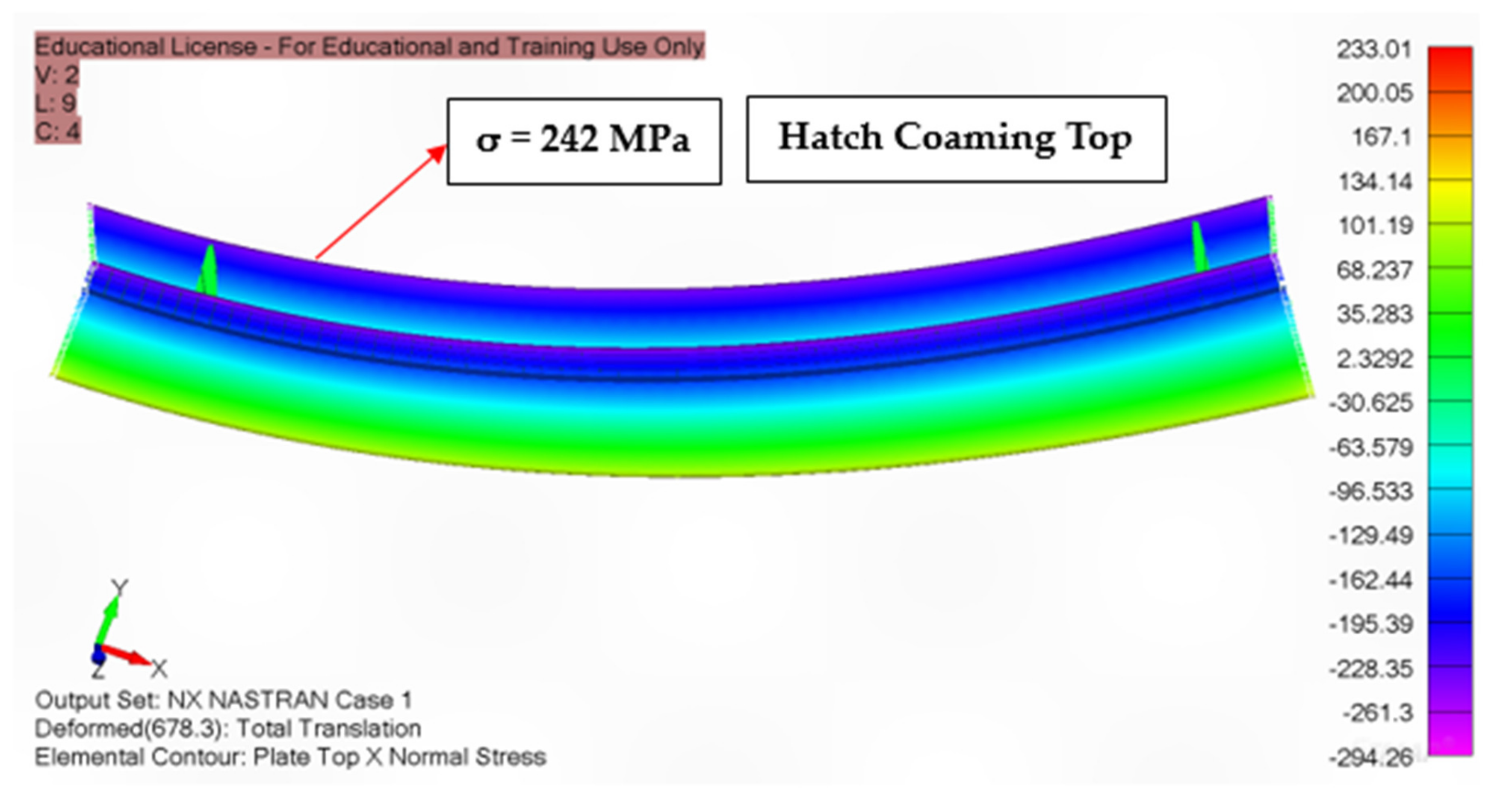
3.4.4. Structural Analysis of Ships under Combined Bending and Torsional Loads in Inclined (Oblique Sea) Conditions
Impact of Still Water and Vertical Wave Bending Moment in an Inclined (Oblique Sea) Condition
Impact of the Wave—Induced Torsional Moment in an Inclined (Oblique Sea) Condition
Impact of Horizontal Wave Bending Moment in an Inclined (Oblique Sea) Condition
3.4.5. Impact of Torsion between the Open—Deck and Closed—Deck Ships
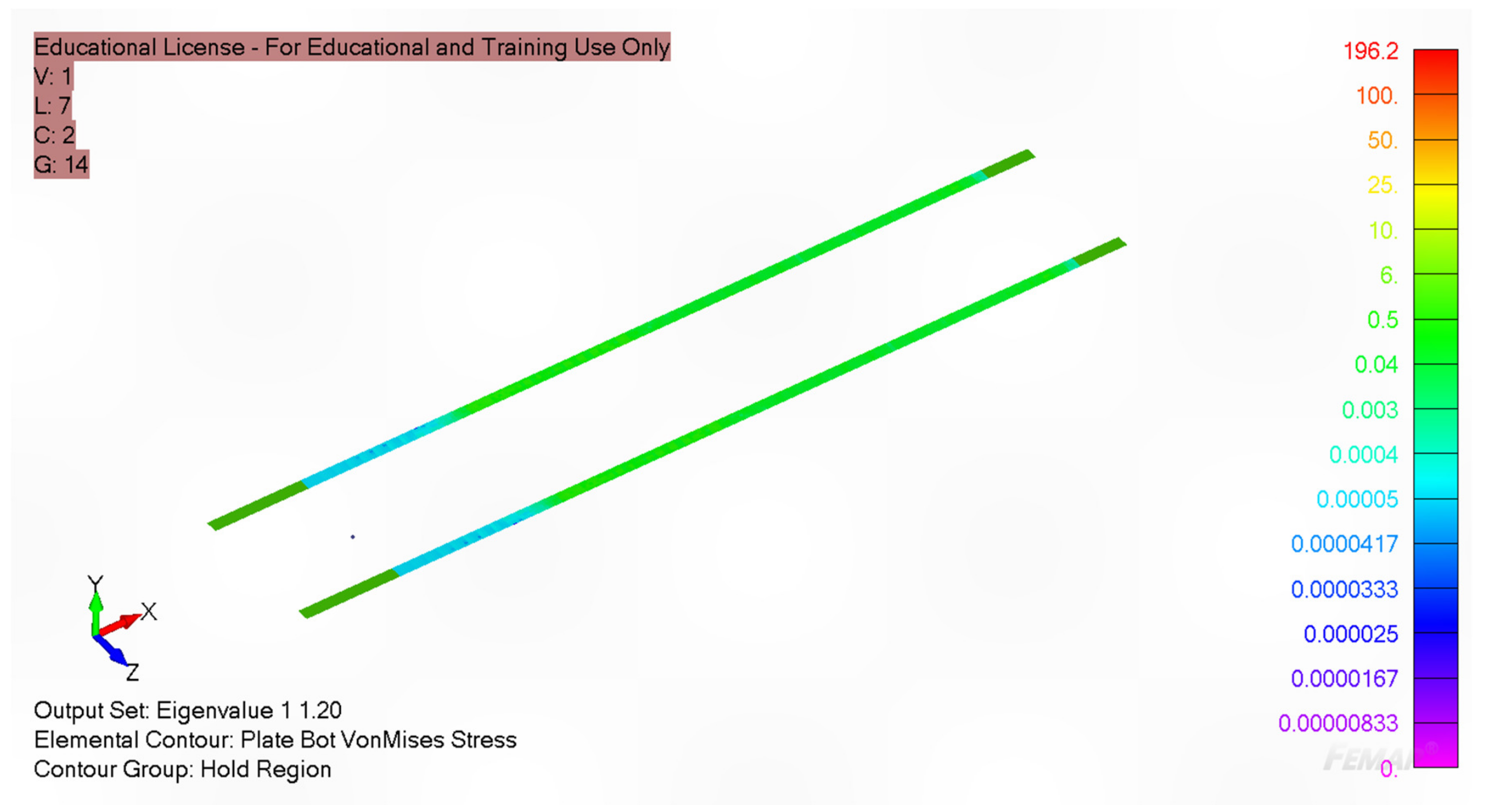
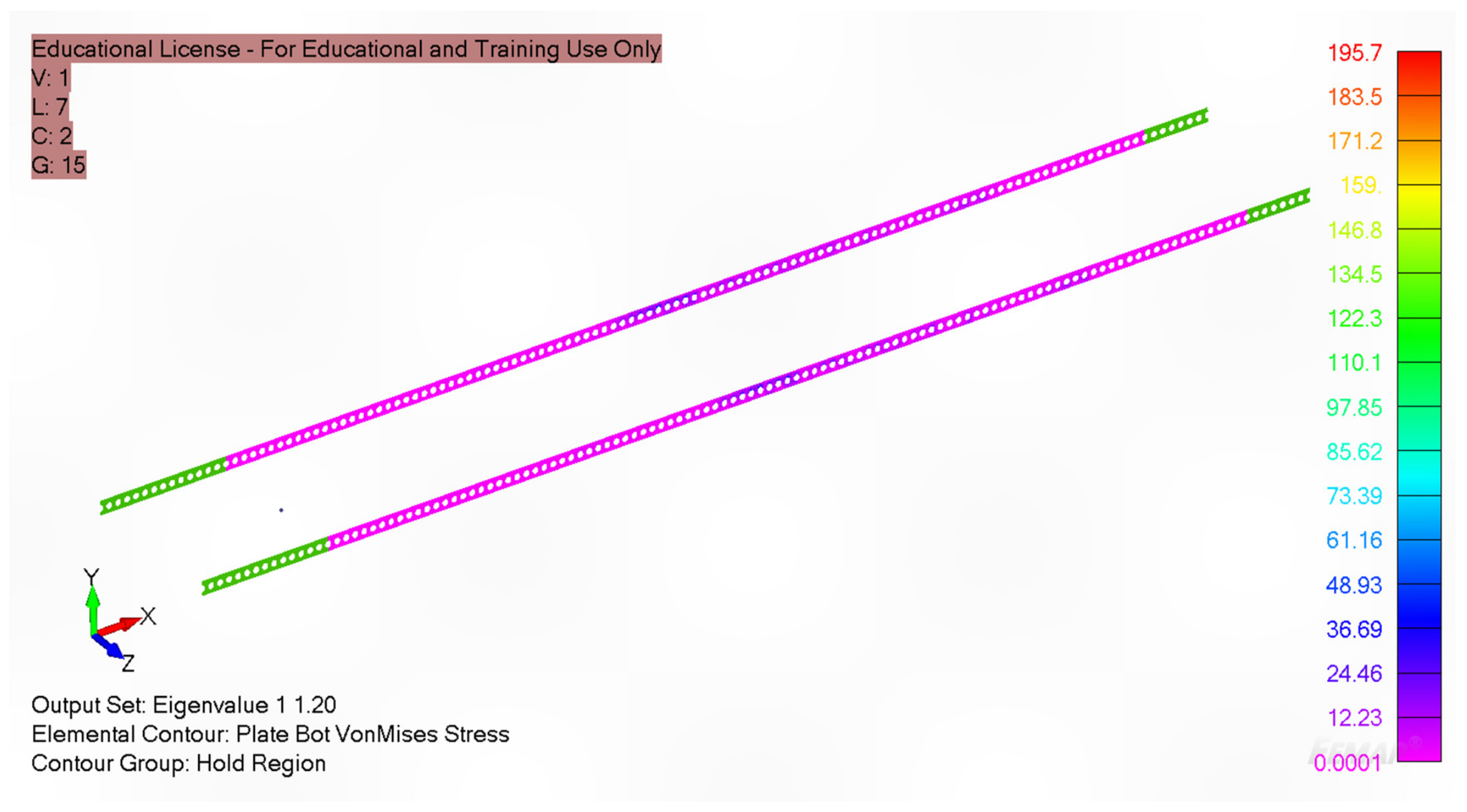
4. Buckling of Plate Panel and Ordinary Stiffener
- Elevated compressive and residual stresses.
- Heightened shear stresses.
- Combined stress conditions.
- Insufficient flexural rigidity.
- Inadequate stiffening.
- Notable initial imperfections.
- Extensive and improper utilisation of high-tensile steel.
- Excessive material degradation resulting from general and localised pitting corrosions.
- Lateral buckling of stiffeners.
- Torsional buckling of stiffeners.
- Flexural buckling of stiffeners.
- Flexural buckling of the plate-stiffener combination.
- Buckling of plate panels between stiffeners.
4.1. Buckling of Inner Bottom Panel
4.2. Buckling of Inner Shell Panel
5. Discussion
6. Conclusions
- Hull girder stresses at midship due to still water bending and vertical wave bending moments contribute to approximately 70% of the total stress in an inclined condition.
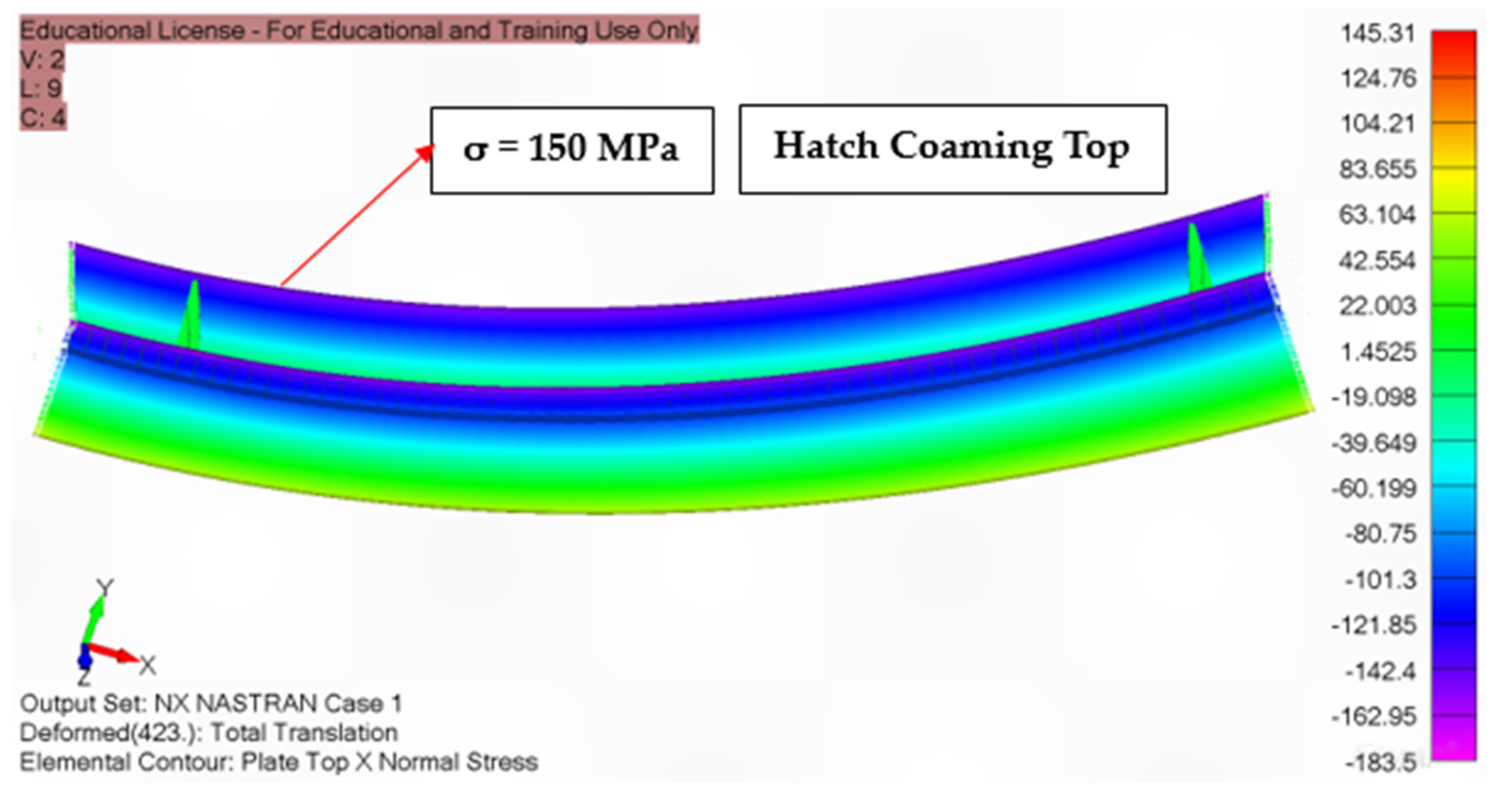
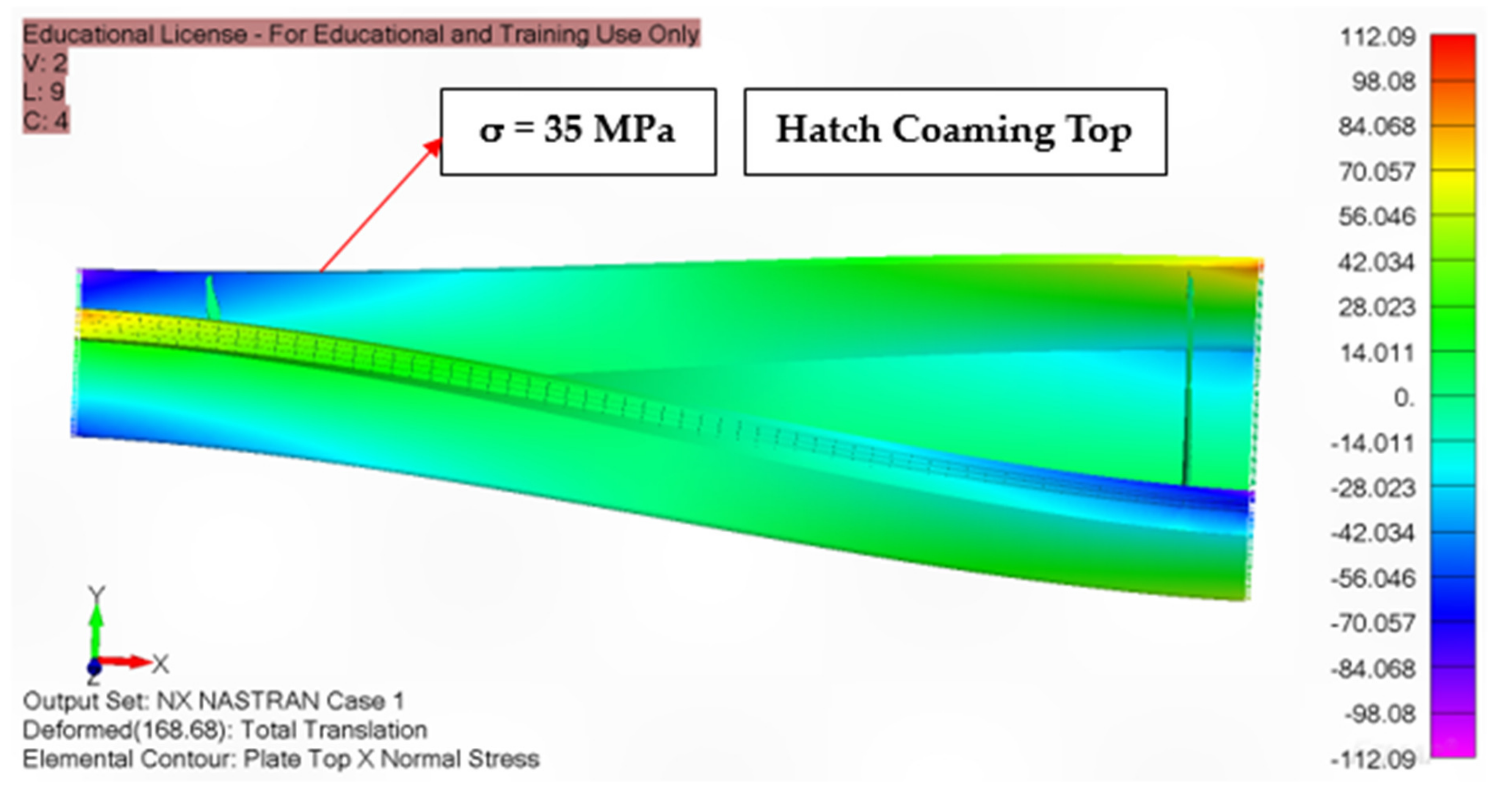
- Hull girder torsion stress is highest near cargo hold bulkheads. Torsion induces the most typical warping stress near the top of the hatch coaming, constituting approximately 20% of the total stress in inclined conditions.
- In an inclined position, the maximum typical stress values from the horizontal wave bending moment are equivalent to those of the vertical side plate (hatch coaming plate) and contribute roughly 10%.
- In closed-deck ships, hull girder warping normal stress is considerably less significant, accounting for around 20% of the total stress in open-deck ships.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yao, T. Hull girder strength. Mar. Struct. 2003, 16, 1–13. [Google Scholar] [CrossRef]
- Novikov, V.V.; Antonenko, S.V.; German, A.P.; Kitaev, M.V. Effect of Ship Torsion with Wide Hatches on the Hull’s Stress State. In Proceedings of the Twenty-Fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015; OnePetro: Richardson, TX, USA, 2015. [Google Scholar]
- Shama, M. Torsion and Shear Stresses in Ships; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Elbatouti, A.; Liu, D.; Jan, H. Structural Analysis of Sl-7 Containership under Combined Loading of Vertical, Lateral and Torsional Moments Using Finite Element Techniques (SL-7-3); 1974. Available online: http://www.shipstructure.org/ (accessed on 11 November 2022).
- Ostapenko, A.; Chu, P.-C. Torsional Strength of Longitudinals in Marine Structures; Lehigh University, Department of Civil Engineering: Bethlehem, PA, USA, 1986. [Google Scholar]
- Jurišić, P.; Parunov, J. Structural aspects during conversion from general cargo ships to cement carriers. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2021, 72, 37–55. [Google Scholar] [CrossRef]
- Vernon, T.A.; Nadeau, Y. Thin-Walled Beam Theories and Their Applications in the Torsional Strength Analysis of Ship Hulls; Defence Research Establishment Atlantic Dartmouth: Dartmouth, NS, USA, 1987. [Google Scholar]
- Tang, H.; Ren, H.; Zhong, Q. Design and model test of structural monitoring and assessment system for trimaran. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2019, 70, 111–134. [Google Scholar] [CrossRef]
- Valsgard, S.; Svensen, T.E.; Thorkildsen, H. A computational method for analysis of container vessels. In Proceedings of the 6th international Symposium on Practical Design of Ships and Mobile Units, PRADS 95, Seoul, Republic of Korea, 17–22 September 1995. [Google Scholar]
- Paik, J.K.; Thayamballi, A.K.; Pedersen, P.T.; Park, Y.I. Ultimate strength of ship hulls under torsion. Ocean. Eng. 2001, 28, 1097–1133. [Google Scholar] [CrossRef]
- Iijima, K.; Shigemi, T.; Miyake, R.; Kumano, A. A practical method for torsional strength assessment of container ship structures. Mar. Struct. 2004, 17, 355–384. [Google Scholar] [CrossRef]
- Senjanović, I.; Tomašević, S.; Rudan, S.; Senjanović, T. Role of transverse bulkheads in hull stiffness of large container ships. Eng. Struct. 2008, 30, 2492–2509. [Google Scholar] [CrossRef]
- Chirică, R.; MUŞAT, S.D.; Boazu, D.; Beznea, E.-F. Torsional Analysis of Ship Hull Model. In Proceedings of the International Conference on Diagnosis and Prediction in Mechanical Engineering Systems (DIPRE’09), Galati, Romania, 22–23 October 2009. [Google Scholar]
- Parunov, J.; Uroda, T.; Senjanović, I. Structural analysis of a general cargo ship. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2010, 61, 28–33. [Google Scholar]
- Senjanović, I.; Vladimir, N.; Tomić, M. Investigation of torsion, warping and distortion of large container ships. Ocean. Syst. Eng. 2011, 1, 73–93. [Google Scholar] [CrossRef]
- Rörup, J.; Maciolowski, B.; Darie, I. FE-based strength analysis of ship structures for a more advanced class approval. In Proceedings of the PRADS2016, Copenhagen, Denmark, 4–8 September 2016. [Google Scholar]
- Vladimir, N.; Senjanović, I.; Malenica, Š.; De Lauzon, J.; Im, H.; Choi, B.-K.; Seung Cho, D. Structural design of ultra large ships based on direct calculation approach. Pomor. Zb. 2016, 1, 63–79. [Google Scholar] [CrossRef]
- Senjanović, I.; Vladimir, N.; Malenica, S.i.; Tomić, M. Improvements of beam structural modelling in hydroelasticity of ultra large container ships. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 219–228. [Google Scholar]
- Mao, F. Longitudinal Ultimate Bending Strength Analysis of Ship Structure For Emergency Response; Delft University of Technology: Delft, The Netherlands, 2015. [Google Scholar]
- Bauchau, O.A.; Craig, J.I. Euler-Bernoulli beam theory. In Structural Analysis; Springer: Dordrecht, The Netherlands, 2009; pp. 173–221. [Google Scholar]
- Hossain, M. A Beam Model for the Structures of Ship Hull Girder; UNSW Sydney: Sydney, NSW, Australia, 1997. [Google Scholar]
- Senjanović, I.; Senjanović, T.; Tomašević, S.; Rudan, S. Contribution of transverse bulkheads to hull stiffness of large container ships. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2008, 59, 228–238. [Google Scholar]
- Librescu, L.; Song, O. Thin-Walled Composite Beams: Theory and Application; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; Volume 131. [Google Scholar]
- Veritas, B. NR 467 Rules for the Classification of Steel Ships. Paris, France, 2018. Available online: https://marine-offshore.bureauveritas.com/nr467-rules-classification-steel-ships (accessed on 11 November 2022).
- Huang, L.; Li, B.; Wang, Y. FEM and EFG Quasi-Static Explicit Buckling Analysis for Thin-Walled Members. Open J. Civ. Eng. 2017, 7, 432–452. [Google Scholar] [CrossRef]
- Okumoto, Y.; Takeda, Y.; Mano, M.; Okada, T. Design of Ship Hull Structures: A Practical Guide for Engineers; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Rigo, P.; Rizzuto, E. Analysis and design of ship structure. Ship Des. Constr. 2003, 1, 1–18. [Google Scholar]
- Shama, M. Buckling of Ship Structures; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wang, X.; Moan, T. Stochastic and deterministic combinations of still water and wave bending moments in ships. Mar. Struct. 1996, 9, 787–810. [Google Scholar] [CrossRef]
- Chen, Z.; Gui, H.; Dong, P.; Yu, C. Numerical and experimental analysis of hydroelastic responses of a high-speed trimaran in oblique irregular waves. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 409–421. [Google Scholar] [CrossRef]
- Rörup, J.; Darie, I.; Maciolowski, B. Strength analysis of ship structures with open decks. Ships Offshore Struct. 2017, 12, S189–S199. [Google Scholar] [CrossRef]
- Ahmed, F. Development of Guidelines Allowing to Predict the Contribution of the Superstructure to the Hull Girder Strength. Master’s Thesis, University of Liège, Liège, Belgium, 2017. [Google Scholar]
- Brassey, C.A.; Margetts, L.; Kitchener, A.C.; Withers, P.J.; Manning, P.L.; Sellers, W.I. Finite element modelling versus classic beam theory: Comparing methods for stress estimation in a morphologically diverse sample of vertebrate long bones. J. R. Soc. Interface 2013, 10, 20120823. [Google Scholar] [CrossRef] [PubMed]
- Pereira, T.; Garbatov, Y. Multi-attribute decision-making ship structural design. J. Mar. Sci. Eng. 2022, 10, 1046. [Google Scholar] [CrossRef]
- Jurišić, P.; Parunov, J.; Garbatov, Y. Aging effects on ship structural integrity. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2017, 68, 15–28. [Google Scholar] [CrossRef]
- Sun, H.; Wang, X. Buckling and ultimate strength assessment of FPSO structures. In Proceedings of the SNAME Maritime Convention, Houston, TX, USA, 19–21 October 2005; p. D021S003R004. [Google Scholar]














| Items | Dimensions |
|---|---|
| Length overall | 104.135 m |
| Length between perpendicular | 98.535 m |
| Breadth moulded | 15.25 m |
| Depth | 7.45 m |
| Design Draught | 4.90 m |
| Scantling Draught | 5.60 m |
| Range of navigation | Unrestricted |
| Loading sequence | 2R (2 Runs) |
| Propulsion | Self-propelled |
| Service Speed | 12 knots |
| Properties | Symbols | Values |
|---|---|---|
| Elasticity modulus | E | 206 GPa |
| Density | ρ | 7850 kg/m3 |
| Poisson’s ratio | ν | 0.30 |
| Yield Stress | Re | 235 (for MS) 355 (for HTS) |
| Items | Hogging (kNm) | Sagging (kNm) |
|---|---|---|
| Design still water bending moment | 125,651 | −113,909 |
| Design vertical wave bending moment | 177,581 | −192,769 |
| Boundary Conditions | Translations in Directions | Rotation Around Axes | ||||
|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |
| The node at the aft end | Fixed | Fixed | Fixed | Fixed | Fixed | Fixed |
| The node at the fore end | Fixed | Fixed | Fixed | Free | Free | Free |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abedin, J.; Franklin, F.; Mahmud, S.M.I. Linear Longitudinal Strength Analysis of a Multipurpose Cargo Ship under Combined Bending and Torsional Load. J. Mar. Sci. Eng. 2024, 12, 59. https://doi.org/10.3390/jmse12010059
Abedin J, Franklin F, Mahmud SMI. Linear Longitudinal Strength Analysis of a Multipurpose Cargo Ship under Combined Bending and Torsional Load. Journal of Marine Science and Engineering. 2024; 12(1):59. https://doi.org/10.3390/jmse12010059
Chicago/Turabian StyleAbedin, Joynal, Francis Franklin, and S. M. Ikhtiar Mahmud. 2024. "Linear Longitudinal Strength Analysis of a Multipurpose Cargo Ship under Combined Bending and Torsional Load" Journal of Marine Science and Engineering 12, no. 1: 59. https://doi.org/10.3390/jmse12010059