
Investigations into Motion Responses of Suspended Submersible in Internal Solitary Wave Field

Abstract
:1. Introduction
2. Theory and Numerics
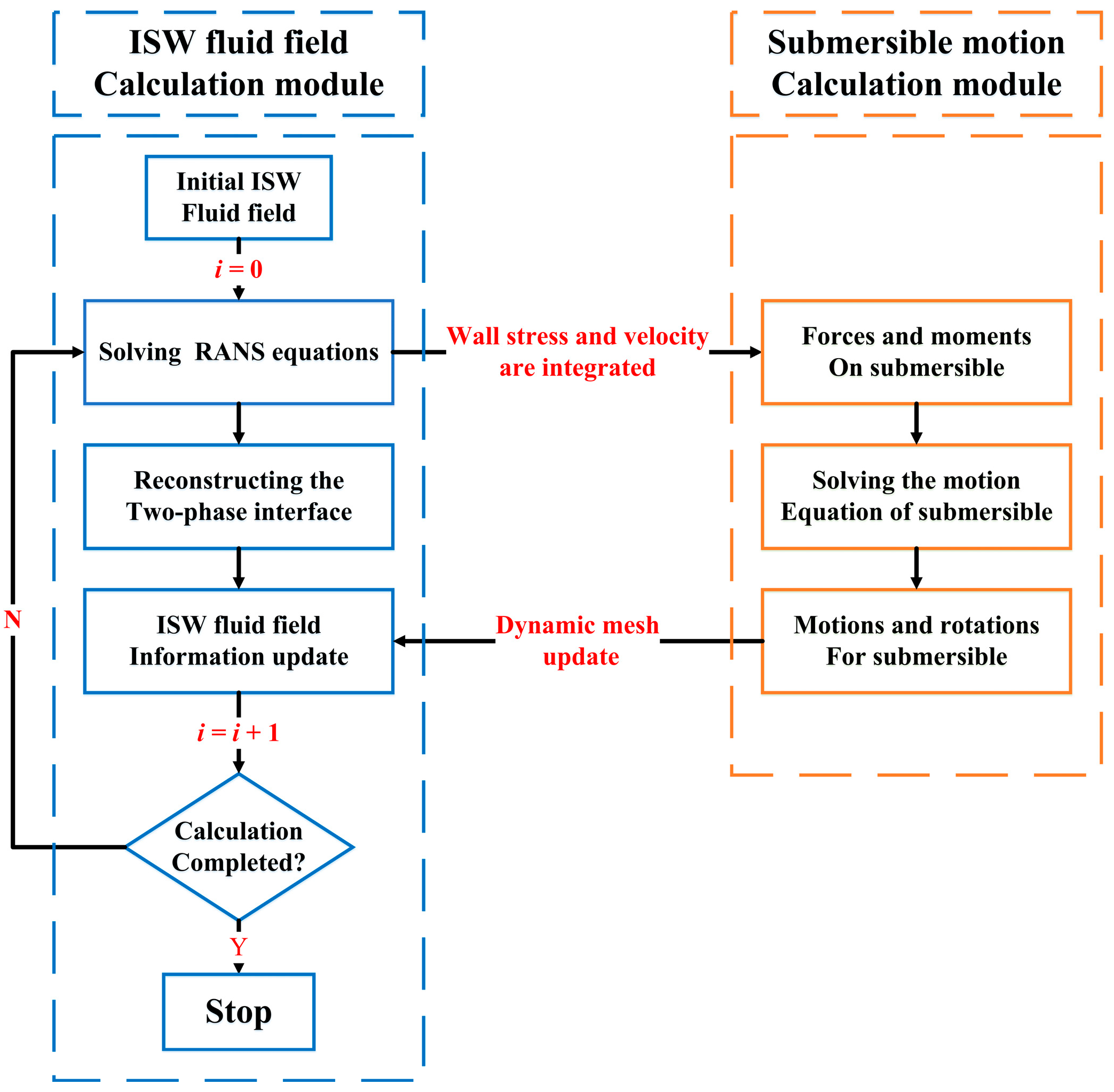
2.1. Basis Equations for Fluid–Structure Interaction
2.2. Theory of Internal Solitary Wave
3. Modeling and Validations
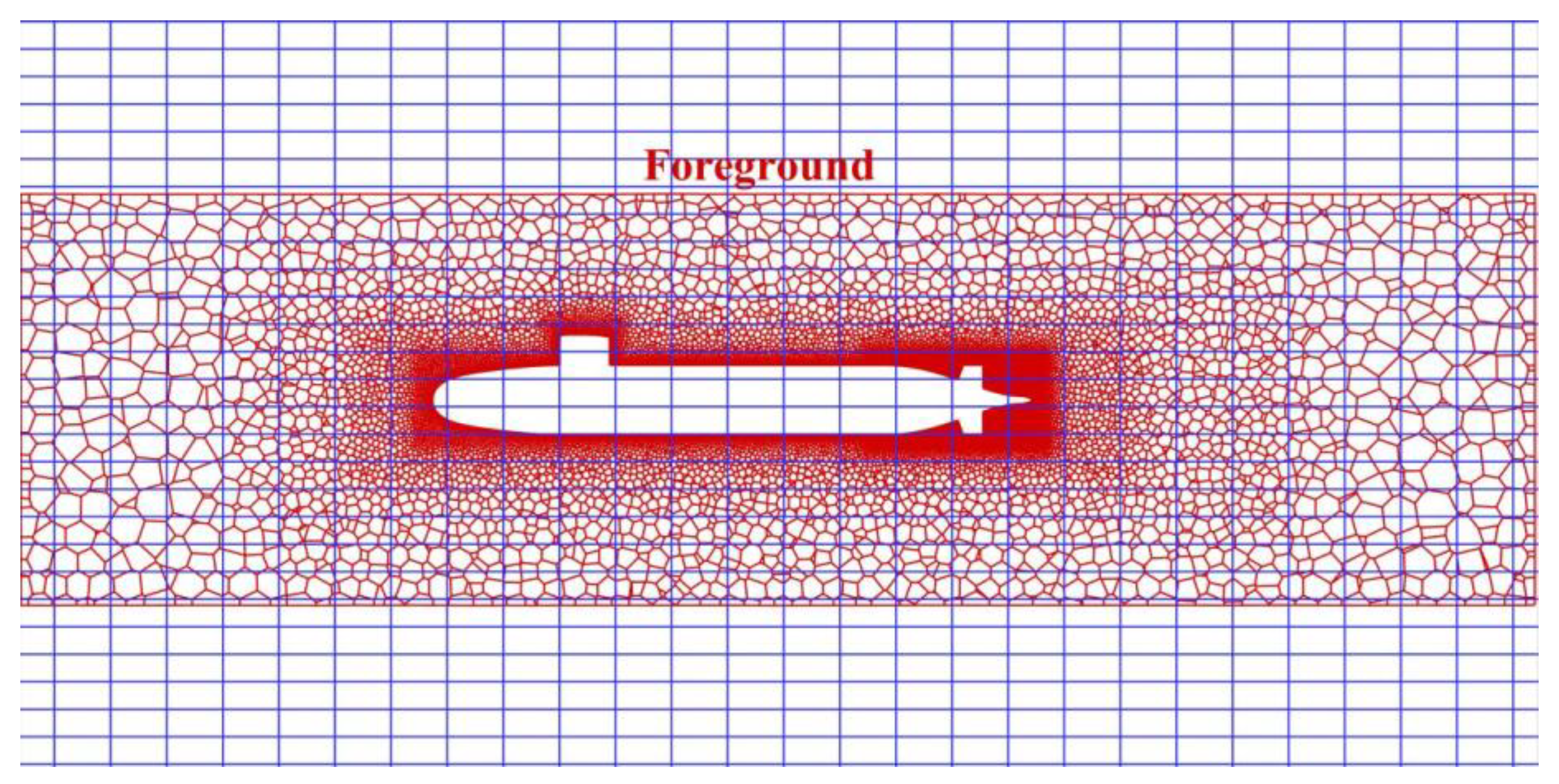
3.1. ISW Numerical Tank and Submersible Model
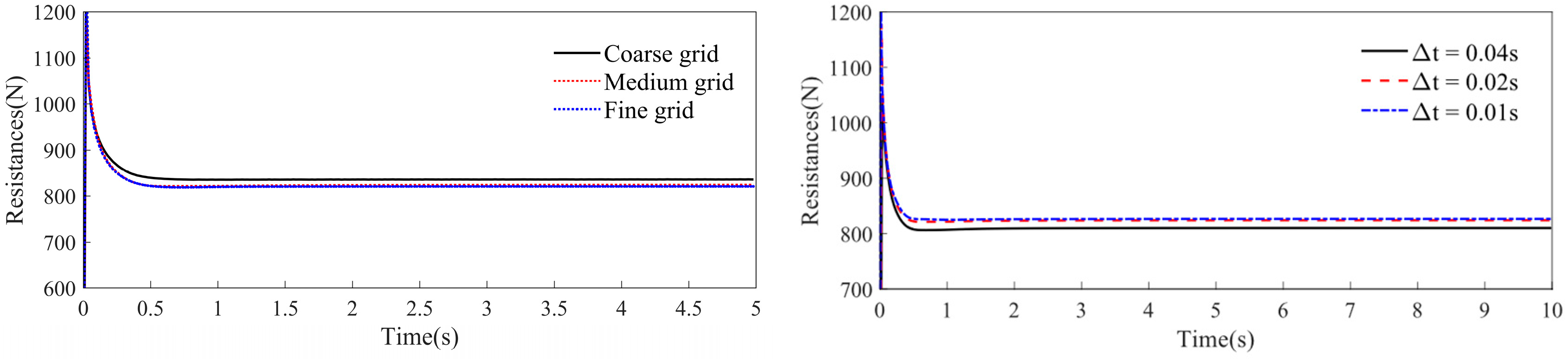
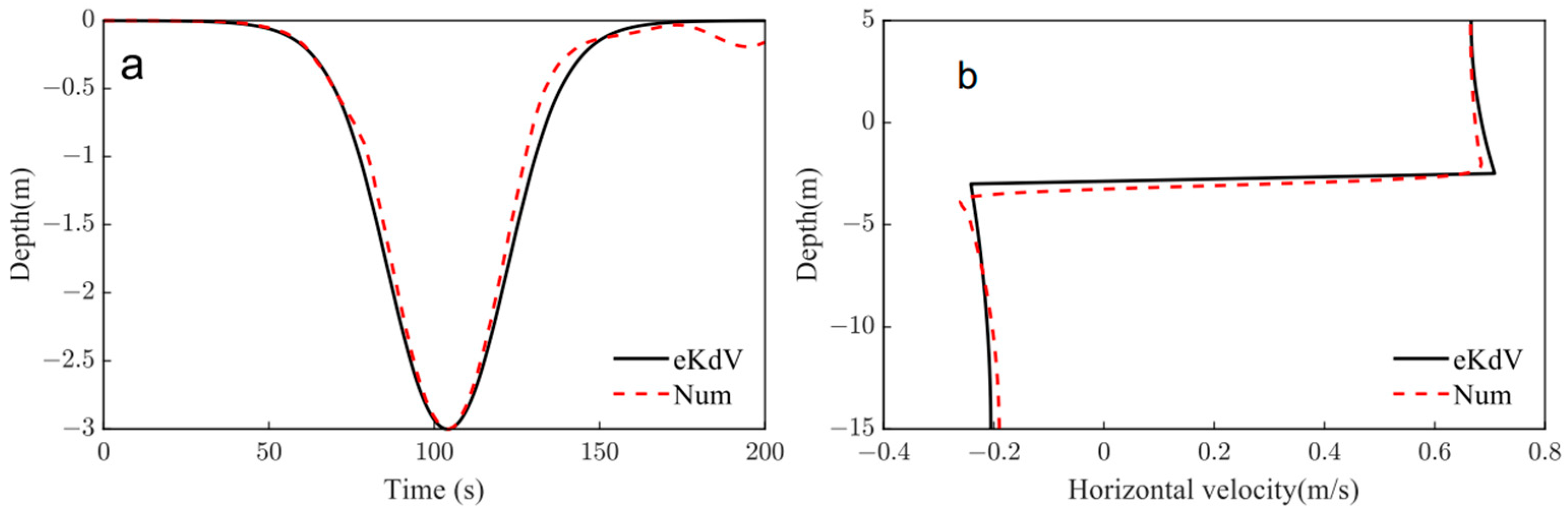
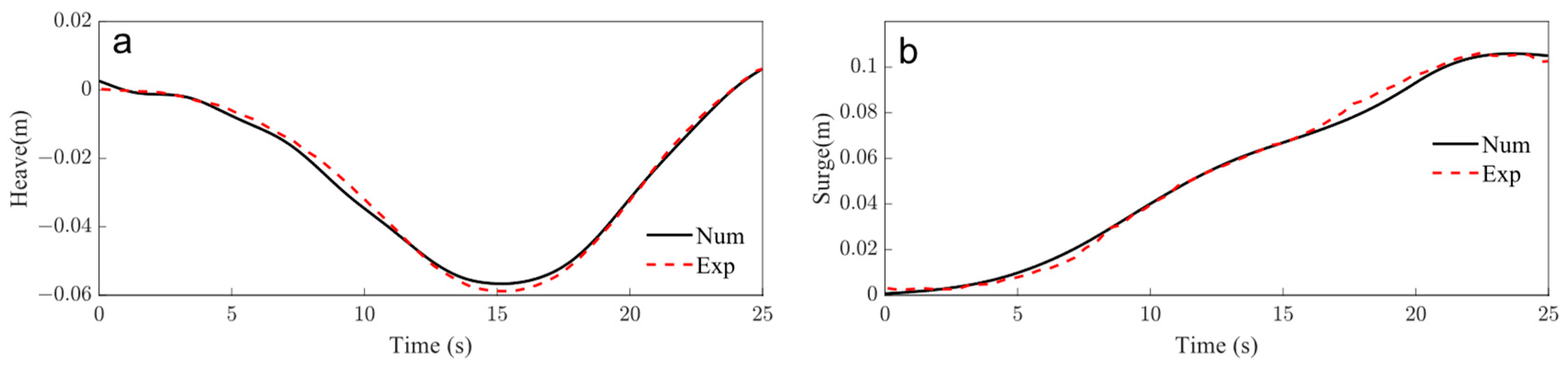
3.2. Numerical Validations
4. Results and Discussions
4.1. Dynamic Responses of the Suspended Submersible under ISW
4.2. The Effect of the Initial Suspended Depth on the Motion Response of the Suspended Submersible
4.3. The Effect of the Wave Amplitude on the Motion Response of the Suspended Submersible
5. Conclusions
- (1)
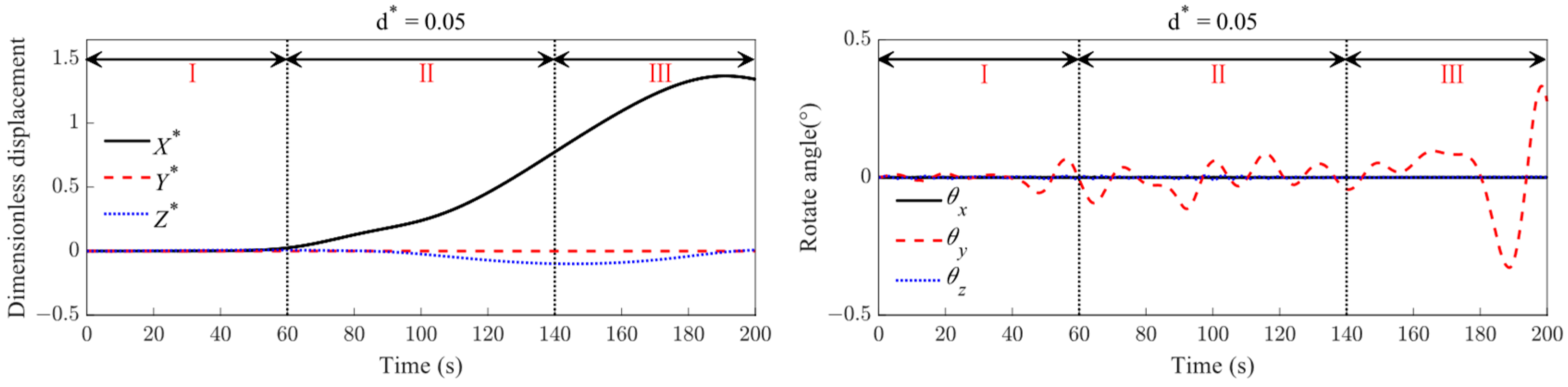
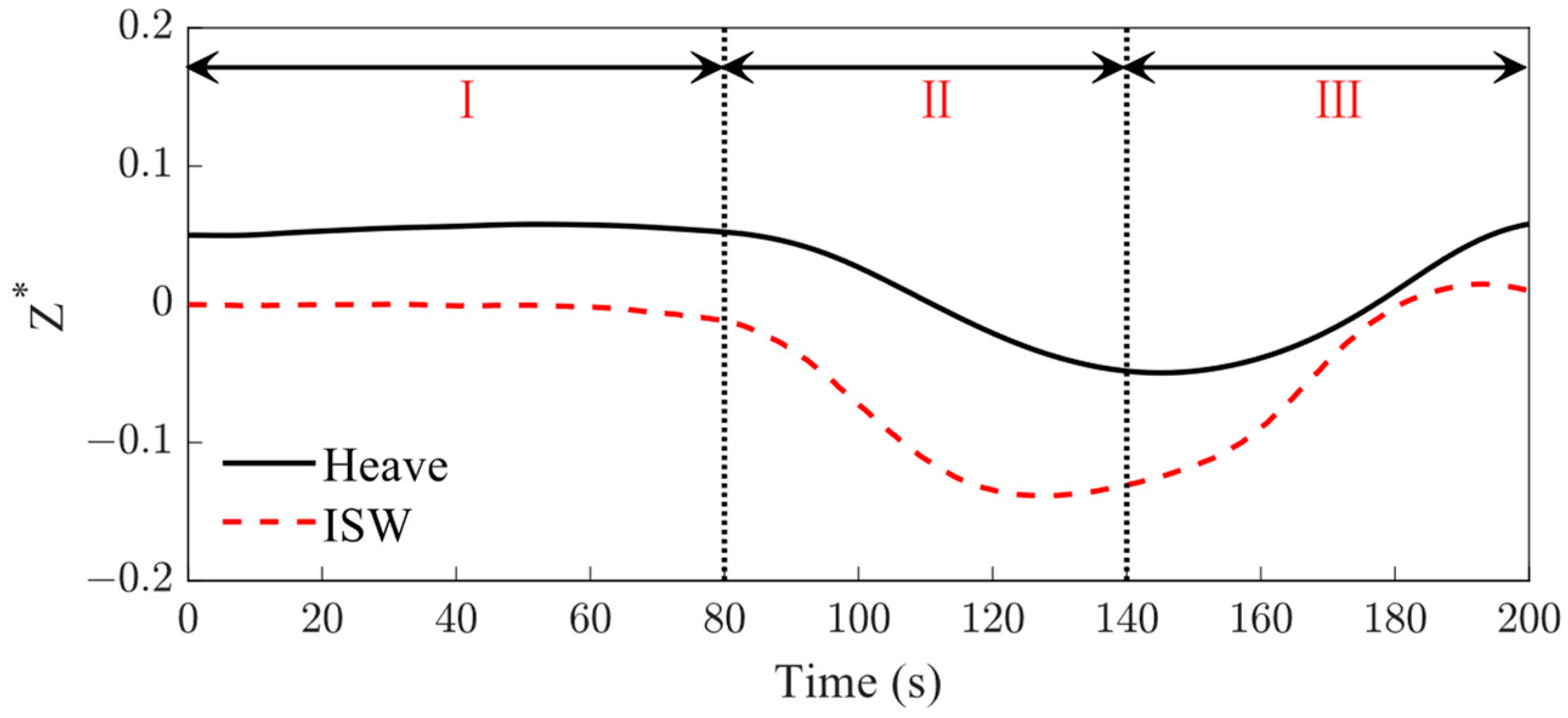
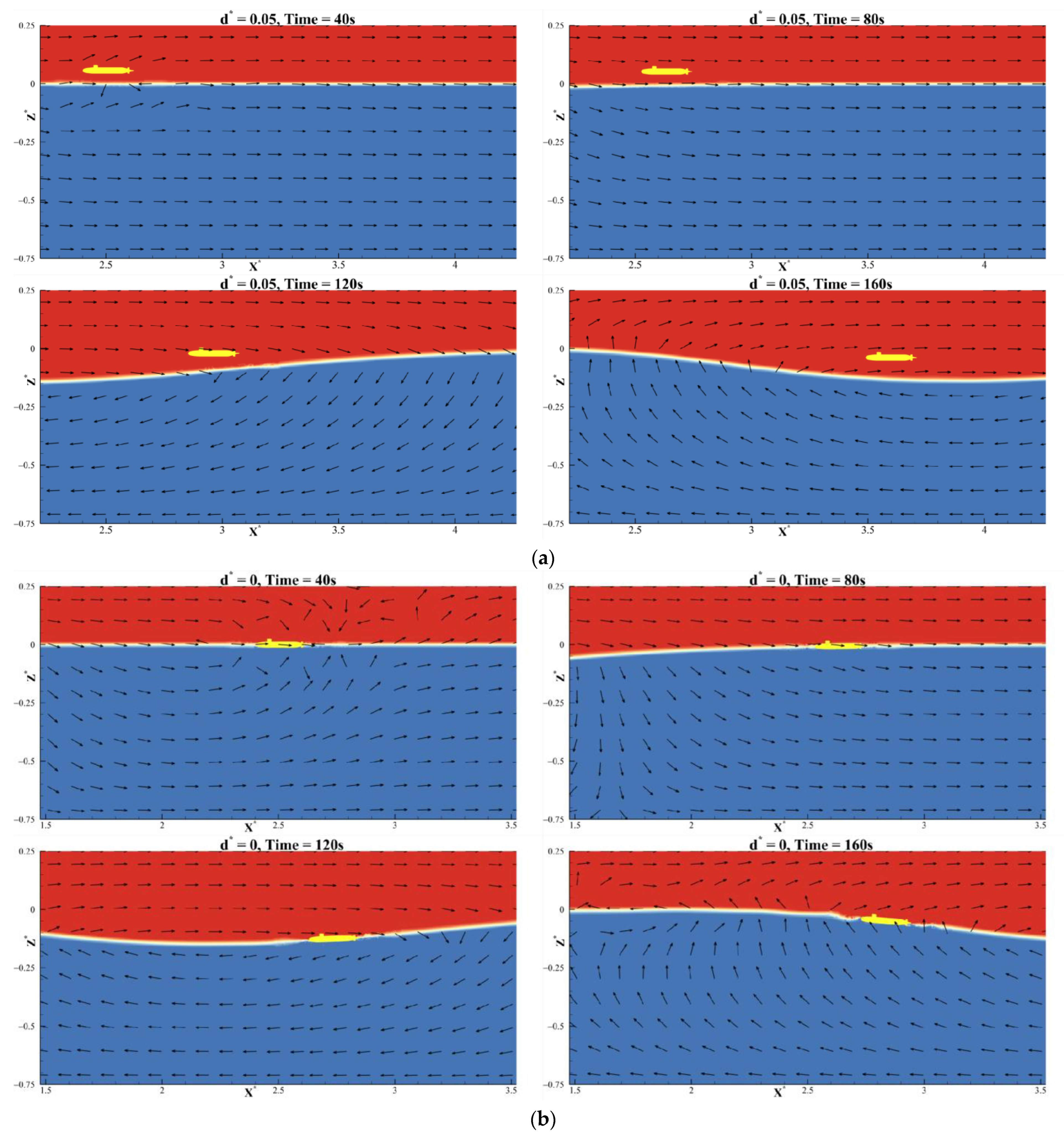
- When the suspended submersible encounters the ISW fluid field, the motions of the submersible in the x-o-z plane change significantly. The submersible always drifts with the nearby ISW surface, gradually dives to the dropping amplitude, and then floats quickly under the action of the ISW fluid field. During the whole motion process, the submersible does not penetrate the wave surface. Moreover, the change in the pitch angle is not significant, due to the action of its own stability.
- (2)
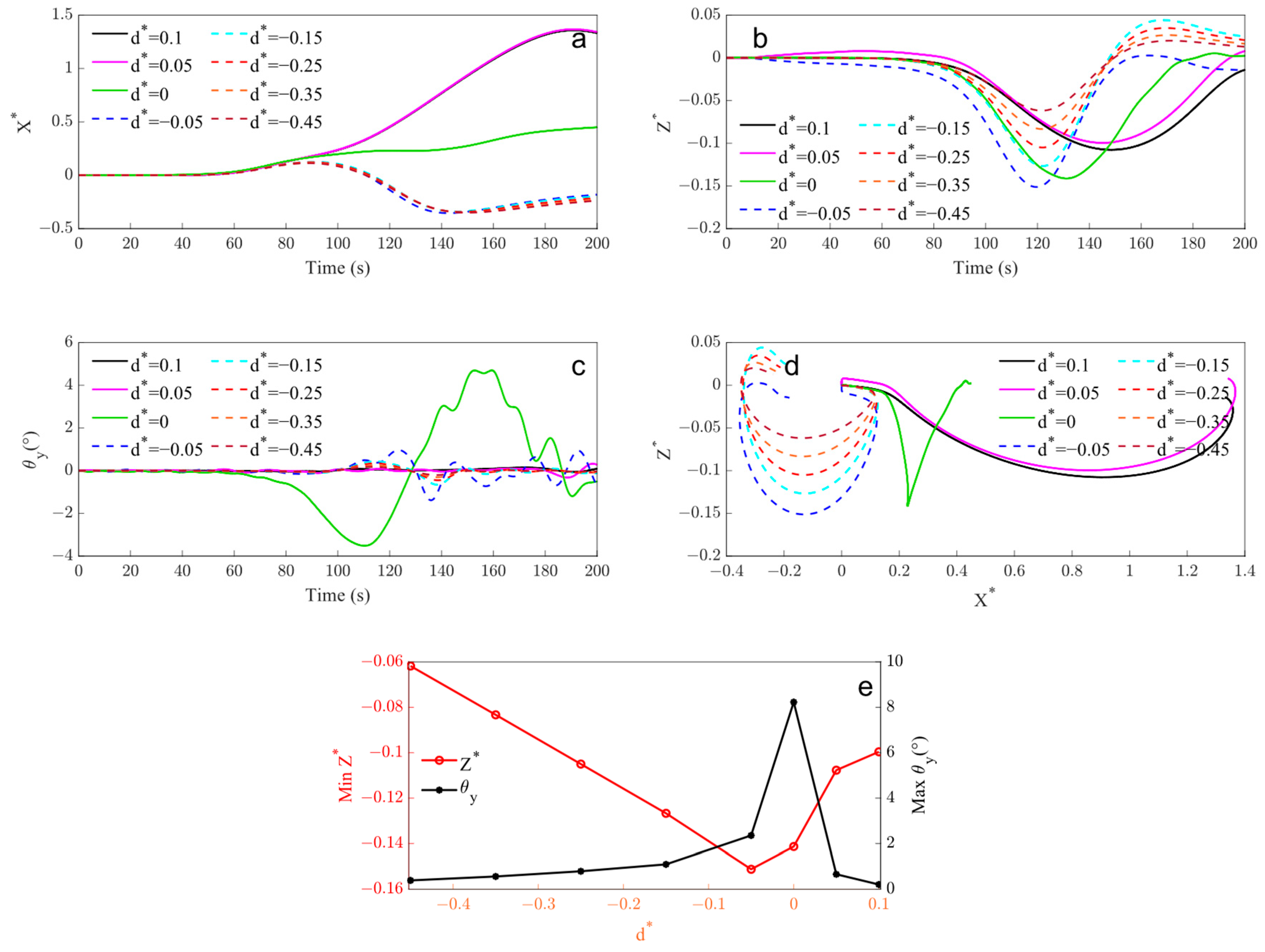
- The initial submerged depth of the submersible is a key factor determining the motion response mode: the submersibles located at the wave interface and upper fluid layer () continue to move for a large distance along the propagation direction of the ISW. The motion trajectory of the submersible immersed in the upper layer () is similar to an unclosed clockwise ellipse, while that of the submersible at the wave interface () is similar to a “V” shape. The submersible at the lower layer of fluid () undergoes directional change movements twice in the longitudinal direction and its motion trajectory presents as an unclosed ellipse, in a clockwise direction.
- (3)
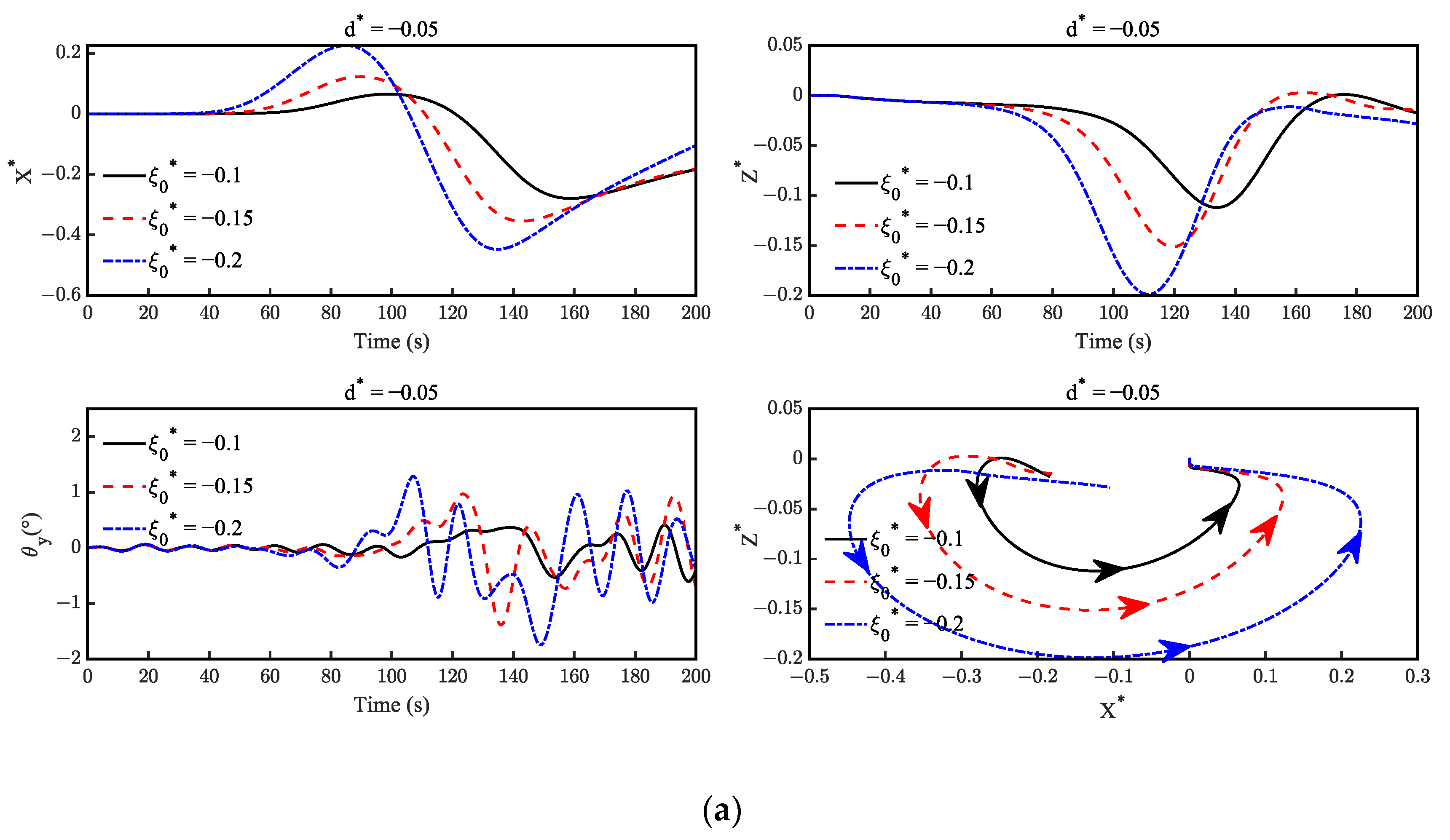
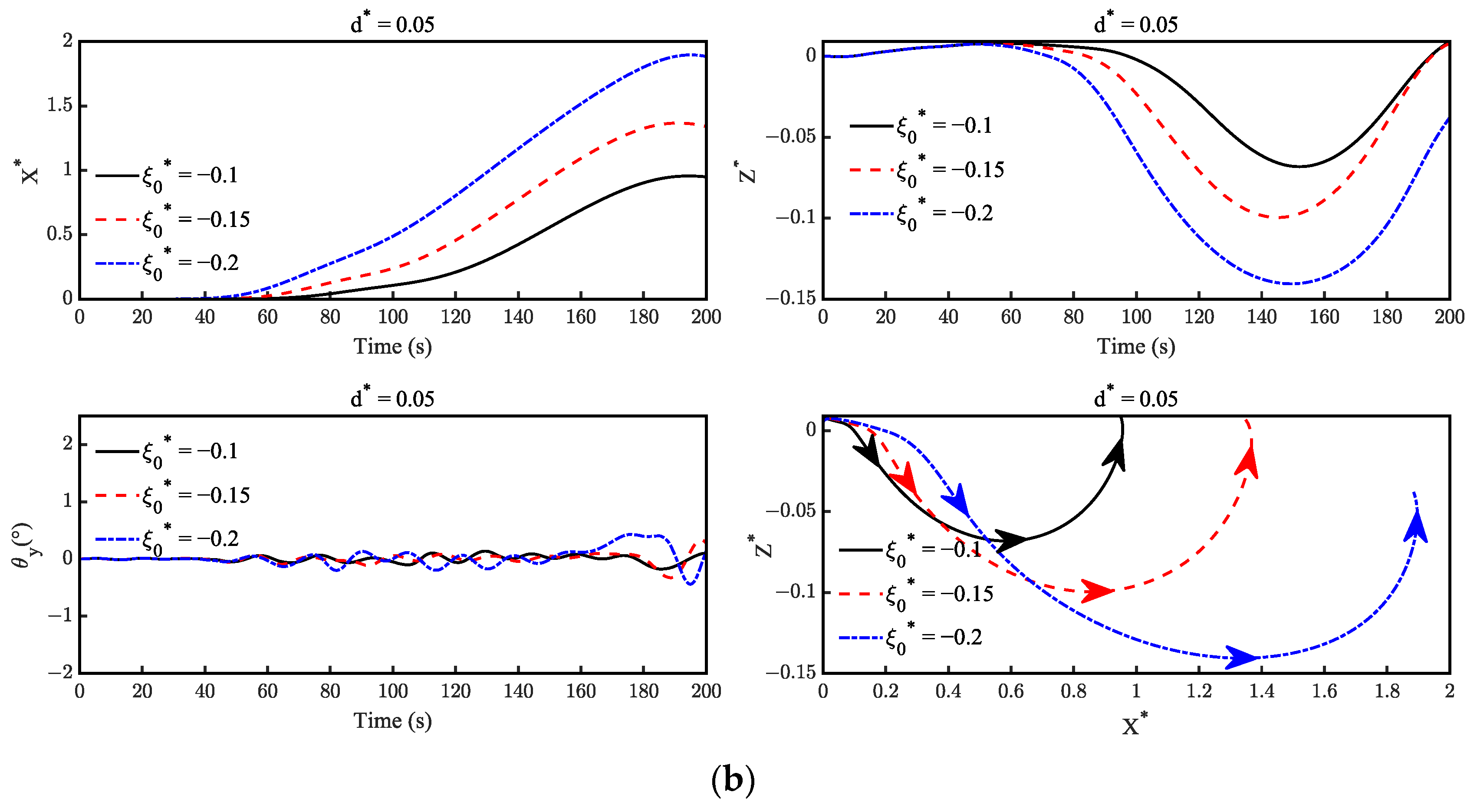
- For the submersible located in the same medium ( or ), the longitudinal motion is almost unaffected by its initial suspended depth. However, the amplitude of the surge motion slightly increases as the distance to the interface decreases, which is completely consistent with the vertical distribution characteristics of the horizontal velocity in the ISW flow field. The amplitude of the heave motion decreases as the vertical distance from the submersible to the wave interface increases.
- (4)
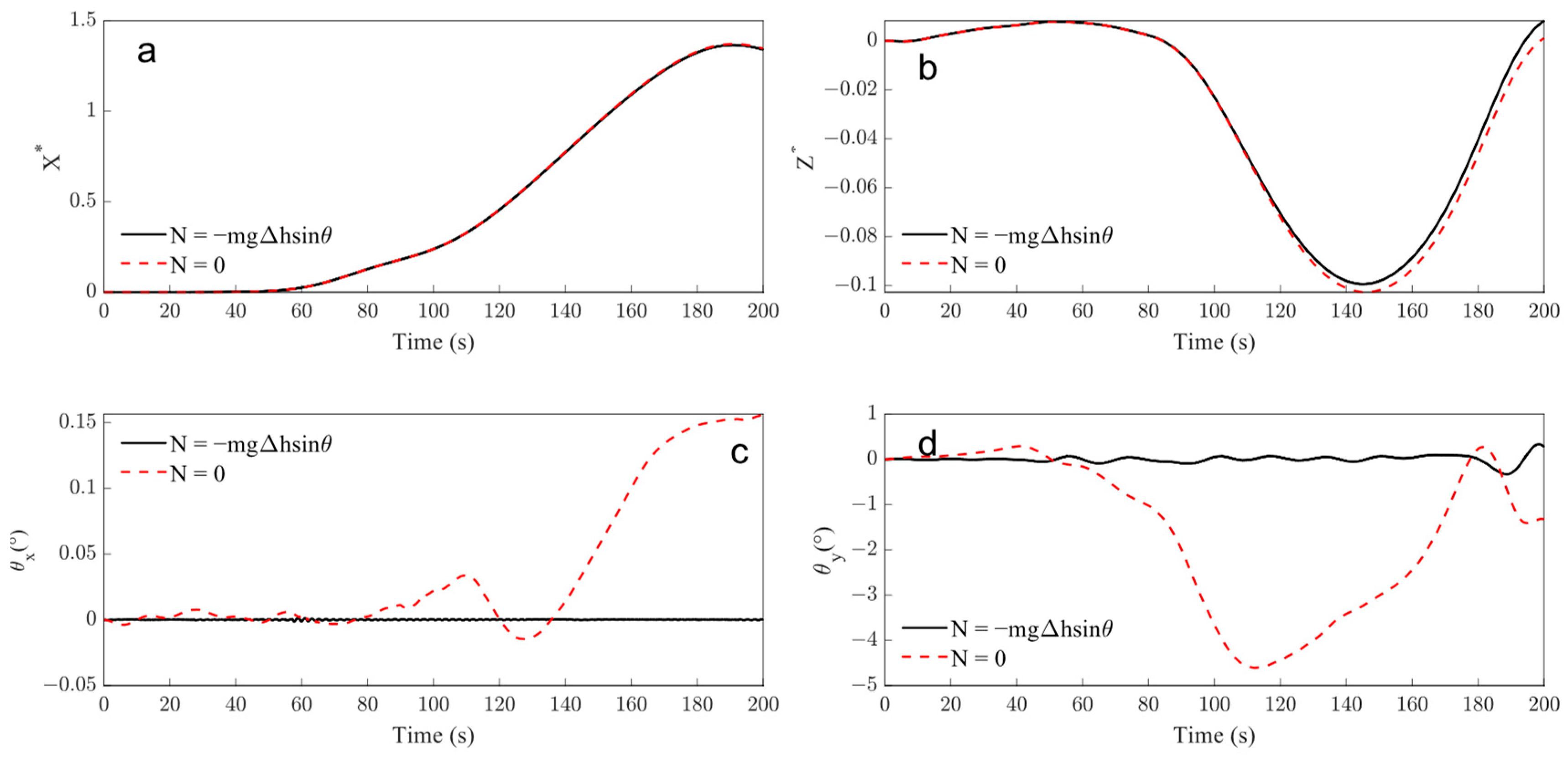
- In the case of the submersible located at the pycnocline (), it would always adhere to the ISW surface; its pitch angle changes significantly with the fluctuation of the ISW surface, which may be the most dangerous condition for the submersible.
- (5)
- The amplitude of the ISW only influences the planar motion amplitude of the submersible and does not determine its natural motion characteristic. The motion responses of the submersible increase with the increase in the amplitude of the ISW. Especially for the heave direction, the amplitude of the submersible even increases proportionally with the increase in the amplitude of the ISW. Moreover, the influence of the amplitude of the ISW, acting on the pitch motion of the submersible, is not significant.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Garrett, C.; Munk, W. Internal waves in the ocean. Annu. Rev. Fluid Mech. 1979, 11, 339–369. [Google Scholar] [CrossRef]
- Osborne, A.R.; Burch, T.L. Internal solitons in the Andaman Sea. Science 1980, 208, 451–460. [Google Scholar] [CrossRef] [PubMed]
- Ebbesmeyer, C.C.; Coomes, C.A.; Hamilton, R.C.; Kurrus, K.A.; Sullivan, T.C.; Salem, B.L.; Romea, R.D.; Bauer, R.J. New observations on internal waves (solitons) in the South China Sea using an acoustic Doppler current profiler. Mar. Technol. Soc. J. 1991, 91, 165–175. [Google Scholar]
- Vlasenko, V.; Stashchuk, N.; Guo, C.; Chen, X. Multimodal structure of baroclinic tides in the South China Sea. Nonlinear Process. Geophys. 2010, 17, 529–543. [Google Scholar] [CrossRef]
- Huang, X.; Chen, Z.; Zhao, W.; Zhang, Z.; Zhou, C.; Yang, Q.; Tian, J. An extreme internal solitary wave event observed in the northern South China Sea. Sci. Rep. 2016, 6, 30041. [Google Scholar] [CrossRef]
- Zhang, M.; Hu, H.; Du, P.; Chen, X.-P.; Li, Z.; Wang, C.; Cheng, L.; Tang, Z. Detection of an internal solitary wave by the underwater vehicle based on machine learning. Phys. Fluids 2022, 34, 115137. [Google Scholar] [CrossRef]
- Gong, Y.; Xie, J.; Xu, J.; Chen, Z.; He, Y.; Cai, S. Oceanic ISWs at the Indonesian submersible wreckage site. Acta Oceanol. Sin. 2022, 41, 109–113. [Google Scholar] [CrossRef]
- Wang, T.; Huang, X.D.; Zhao, W.; Zheng, S.H.; Yang, Y.C.; Tian, J.W. Internal Solitary Wave Activities near the Indonesian Submarine Wreck Site Inferred from Satellite Images. J. Mar. Sci. Eng. 2022, 10, 197. [Google Scholar] [CrossRef]
- Chen, M.; Chen, K.; You, Y. Experimental investigation of internal solitary wave forces on a semi-submersible. Ocean Eng. 2017, 141, 205–214. [Google Scholar] [CrossRef]
- Chen, M.; Chen, J.; You, Y.X. Forces on a semi-submersible in internal solitary waves with different propagation directions. Ocean Eng. 2020, 217, 107864. [Google Scholar] [CrossRef]
- Cui, J.; Dong, S.; Wang, Z.; Han, X.; Yu, M. Experimental research on internal solitary waves interacting with moored floating structures. Mar. Struct. 2019, 67, 102641. [Google Scholar] [CrossRef]
- Russo, S.; Contestabile, P.; Bardazzi, A.; Leone, E.; Iglesias, G.; Tomasicchio, G.R.; Vicinanza, D. Dynamic loads and response of a spar buoy wind turbine with pitch-controlled rotating blades: An experimental study. Energies 2021, 14, 3598. [Google Scholar] [CrossRef]
- Wang, S.D.; Wei, G.; Du, H.; Wu, J.L.; Wang, X.L. Experimental investigation of the wave-flow structure of an oblique internal solitary wave and its force exerted on a slender body. Ocean Eng. 2020, 201, 107057. [Google Scholar] [CrossRef]
- Wang, S.; Du, H.; Wei, G.; Peng, P.; Xuan, P.; Xu, J. Effects of the inhomogeneous vertical structure of an internal solitary wave on the force exerted on a horizontal transverse cylinder. Phys. Fluids 2023, 35, 062117. [Google Scholar] [CrossRef]
- Cui, J.; Dong, S.; Wang, Z.; Han, X.; Lv, P. Kinematic response of submerged structures under the action of internal solitary waves. Ocean Eng. 2020, 196, 106814. [Google Scholar] [CrossRef]
- Cui, J.; Dong, S.; Wang, Z.; Cheng, J.; Ren, J. Experimental study on motion response of a submersible spherical model under the action of internal solitary wave propagating over a ridge topography. Ocean Eng. 2022, 258, 111700. [Google Scholar] [CrossRef]
- Cai, S.; Long, X.; Gan, Z. A method to estimate the forces exerted by internal solitons on cylindrical piles. Ocean Eng. 2003, 30, 673–689. [Google Scholar] [CrossRef]
- Cai, S.; Wang, S.; Long, X. A simple estimation of the force exerted by internal solitons on cylindrical piles. Ocean Eng. 2006, 33, 974–980. [Google Scholar] [CrossRef]
- Cai, S.; Long, X.; Wang, S. Forces and torques exerted by internal solitons in shear flows on cylindrical piles. Appl. Ocean Res. 2008, 30, 72–77. [Google Scholar] [CrossRef]
- Feng, K.; Yao, Z.; Hu, F.; Liu, L. Motion simulation of submersible passing through internal solitary wave. Chin. J. Hydrodyn. 2022, 37, 467–473. [Google Scholar]
- Liu, X.; Gou, Y.; Teng, B. Research on the Trajectory and Gesture of a Slender Submarine Undergoing Significant Motion Under the Action of Internal Solitary Waves. Chin. J. Acta Armamentarii 2023, 1–12. [Google Scholar]
- Liu, M.; Wei, G.; Sun, Z. Motion response of a horizontal slender submerged ellipsoid induced by head-on interfacial solitary waves. In Proceedings of the 30th National Hydrodynamics Symposium and the 15th National Hydrodynamics Academic Conference, Hefei, China, 16–19 August 2019; pp. 247–254. [Google Scholar]
- Junrong, W.; Junfeng, D.; Min, Z.; Anteng, C. An Iterative Updating Method for Dynamic Responses of a Floating Platform Under Action of Internal Solitary Waves. In Proceedings of the ASME 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 58769. [Google Scholar]
- Cheng, S.; Yu, Y.; Li, Z.; Huang, Z.; Yang, Z.; Zhang, X.; Cui, Y.; Wu, J.; Liu, X.; Yu, J. The influence of internal solitary wave on semi-submersible platform system including mooring line failure. Ocean Eng. 2022, 258, 111604. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.; Chen, T. Numerical Investigation of internal solitary wave forces on submersibles in continuously stratified fluids. J. Mar. Sci. Eng. 2021, 9, 1374. [Google Scholar] [CrossRef]
- He, G.; Xie, H.; Zhang, Z.; Liu, S. Numerical Investigation of internal solitary wave forces on a moving submersible. J. Mar. Sci. Eng. 2022, 10, 1020. [Google Scholar] [CrossRef]
- Ding, W.; Sun, H.; Zhao, X.; Ai, C. Numerical study of the interaction between an internal solitary wave and a submerged extended cylinder using OpenFOAM. Ocean Eng. 2023, 274, 113985. [Google Scholar] [CrossRef]
- Cheng, L.; Du, P.; Hu, H.; Xie, Z.; Yuan, Z.; Kaidi, S.; Chen, X.; Xie, L.; Huang, X.; Wen, J. Control of underwater suspended vehicle to avoid ‘falling deep’ under the influence of internal solitary waves. Ships Offshore Struct. 2023, 1–19. [Google Scholar] [CrossRef]
- Wang, J.; He, Z.; Xie, B.; Zhuang, C.; Wu, W. Numerical investigation on the interaction between internal solitary wave and self-propelled submersible. Phys. Fluids 2023, 35, 107119. [Google Scholar] [CrossRef]
- Wang, C.; Wang, J.; Liu, Q.; Zhao, S.; Li, Z.; Kaidi, S.; Hu, H.; Chen, X.; Du, P. Dynamics and “falling deep” mechanism of submerged floating body under internal solitary waves. Ocean Eng. 2023, 288, 116058. [Google Scholar] [CrossRef]
- Chen, H.C.; Patel, V.C.; Ju, S. Solutions of Reynolds-averaged Navier-Stokes equations for three-dimensional incompressible flows. J. Sci. Comput. Phys. 1990, 88, 305–336. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S. Renormalization group analysis of turbulence. I. Basic theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Wang, J.; Shi, C.; Wang, H.D.; He, C. Dynamic analysis and swing suppression method of a “Mooring-HLC-Cargo” coupled system. Ocean Eng. 2024, 295, 116840. [Google Scholar] [CrossRef]
- Gertler, M.; Hagen, G.R. Standard Equations of Motion for Submersible Simulation; NSRDC Report 2510; Defense Technical Information Center: Fort Belvoir, VA, USA, 2020. [Google Scholar]
- He, G.; Zhang, C.; Xie, H.; Liu, S. The Numerical Simulation of a Submarine Based on a Dynamic Mesh Method. J. Mar. Sci. Eng. 2022, 10, 1417. [Google Scholar] [CrossRef]
- Yu, T.; Chen, X.; Tang, Y.; Wang, J.; Wang, Y.; Huang, S. Numerical modelling of wave run-up heights and loads on multi-degree-of-freedom buoy wave energy converters. Appl. Energy 2023, 344, 121255. [Google Scholar] [CrossRef]
- Koop, C.; Butler, G. An investigation of ISWs in a two-fluid system. J. Fluid Mech. 1981, 112, 225–251. [Google Scholar] [CrossRef]
- Michallet, H.; Barthelemy, E. Experimental study of interfacial solitary waves. J. Fluid Mech. 1998, 366, 159–177. [Google Scholar] [CrossRef]
- Choi, W.; Camassa, R. Fully nonlinear internal waves in a two-fluid system. J. Fluid Mech. 1999, 396, 1–36. [Google Scholar] [CrossRef]
- Miyata, M. An internal solitary wave of large amplitude. La Mer 1985, 23, 43–48. [Google Scholar]
- Turkington, B.; Eydeland, A.; Wang, S. A computational method for solitary internal waves in a continuously stratified fluid. Stud. Appl. Math. 1991, 85, 93–127. [Google Scholar] [CrossRef]
- Craig, W.; Guyenne, P.; Kalisch, H. Hamiltonian long-wave expansions for free surfaces and interfaces. Commun. Pure Appl. Math. 2005, 58, 1587–1641. [Google Scholar] [CrossRef]
- Kakutani, T.; Yamasaki, N. Solitary waves on a two-layer fluid. J. Phys. Soc. Jpn. 1978, 45, 674–679. [Google Scholar] [CrossRef]
- Kang, X.L.; Wang, J.R.; Xie, B.T.; He, Z.Y. Numerical Study on the Fluid Structure Interaction of internal Solitary Waves and a Spar-Type FOWT. J. Ocean Univ. China 2023, 53, 98–105. [Google Scholar]
- Groves, N.; Huang, T.; Chang, M. Geometric Characteristics of DARPA (Defense Advanced Research Projects Agency) SUBOFF Models (DTRC Model Numbers 5470 and 5471); David Taylor Research Center Bethesda MD Ship Hydromechanics Department; Defense Technical Information Center: Fort Belvoir, VA, USA, 1989. [Google Scholar]
- Liu, H.; Huang, T. Summary of DARPA SUBOFF Experimental Program Data; Naval Surface Warfare Center Carderock Div Bethesda MD Hydromechanics Directorate; Defense Technical Information Center: Fort Belvoir, VA, USA, 1998. [Google Scholar]
- Liu, S.; He, G.H.; Zhang, Z.G.; Hu, C.H.; Zhang, C.; Wang, Z.K.; Xie, H.F. Multi-Parameter Influence Analysis of Interaction Between Internal Solitary Wave and Fixed Submerged Body. Chin. Ocean Eng. 2023, 37, 934–947. [Google Scholar] [CrossRef]
- Duan, J.; Wang, X.; Zhou, J.; You, Y. Effect of internal solitary wave on the dynamic response of a flexible riser. Phys. Fluids 2023, 35, 017107. [Google Scholar] [CrossRef]
- Sukas, O.F.; Kinaci, O.K.; Cakici, F.; Gokce, M.K. Hydrodynamic assessment of planing hulls using overset grids. Appl Ocean Res. 2017, 65, 35–46. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Velocity (kn) | Numerical Resistances (N) | Experimental Resistances (N) | Relative Error (%) |
|---|---|---|---|
| 10 | 282 | 284 | −0.704 |
| 11.85 | 387 | 389 | −0.514 |
| 13.92 | 526 | 527 | −0.190 |
| 16 | 680 | 676 | 0.592 |
| 17.79 | 827 | 821 | 0.731 |
| Position | ) | ) |
|---|---|---|
| Upper fluid | 0.1 | 998 |
| 0.05 | 998 | |
| Pycnocline | 0 | 1013 |
| Lower fluid | −0.05 | 1025 |
| −0.15 | 1025 | |
| −0.25 | 1025 | |
| −0.35 | 1025 | |
| −0.45 | 1025 |
| Position | ) | ) |
|---|---|---|
| Upper layer of fluid | 0.05 | 0.1 |
| 0.15 | ||
| 0.2 | ||
| Lower layer of fluid | 0.05 | 0.1 |
| 0.15 | ||
| 0.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Wu, W.; Wang, J.; Ding, L.; Chang, Q.; Huang, Y. Investigations into Motion Responses of Suspended Submersible in Internal Solitary Wave Field. J. Mar. Sci. Eng. 2024, 12, 596. https://doi.org/10.3390/jmse12040596
He Z, Wu W, Wang J, Ding L, Chang Q, Huang Y. Investigations into Motion Responses of Suspended Submersible in Internal Solitary Wave Field. Journal of Marine Science and Engineering. 2024; 12(4):596. https://doi.org/10.3390/jmse12040596
Chicago/Turabian StyleHe, Zhenyang, Wenbin Wu, Junrong Wang, Lan Ding, Qiangbo Chang, and Yahao Huang. 2024. "Investigations into Motion Responses of Suspended Submersible in Internal Solitary Wave Field" Journal of Marine Science and Engineering 12, no. 4: 596. https://doi.org/10.3390/jmse12040596