
Rapid Estimation Model for Wake Disturbances in Offshore Floating Wind Turbines


Abstract
:1. Introduction
2. Initial Wake Analysis
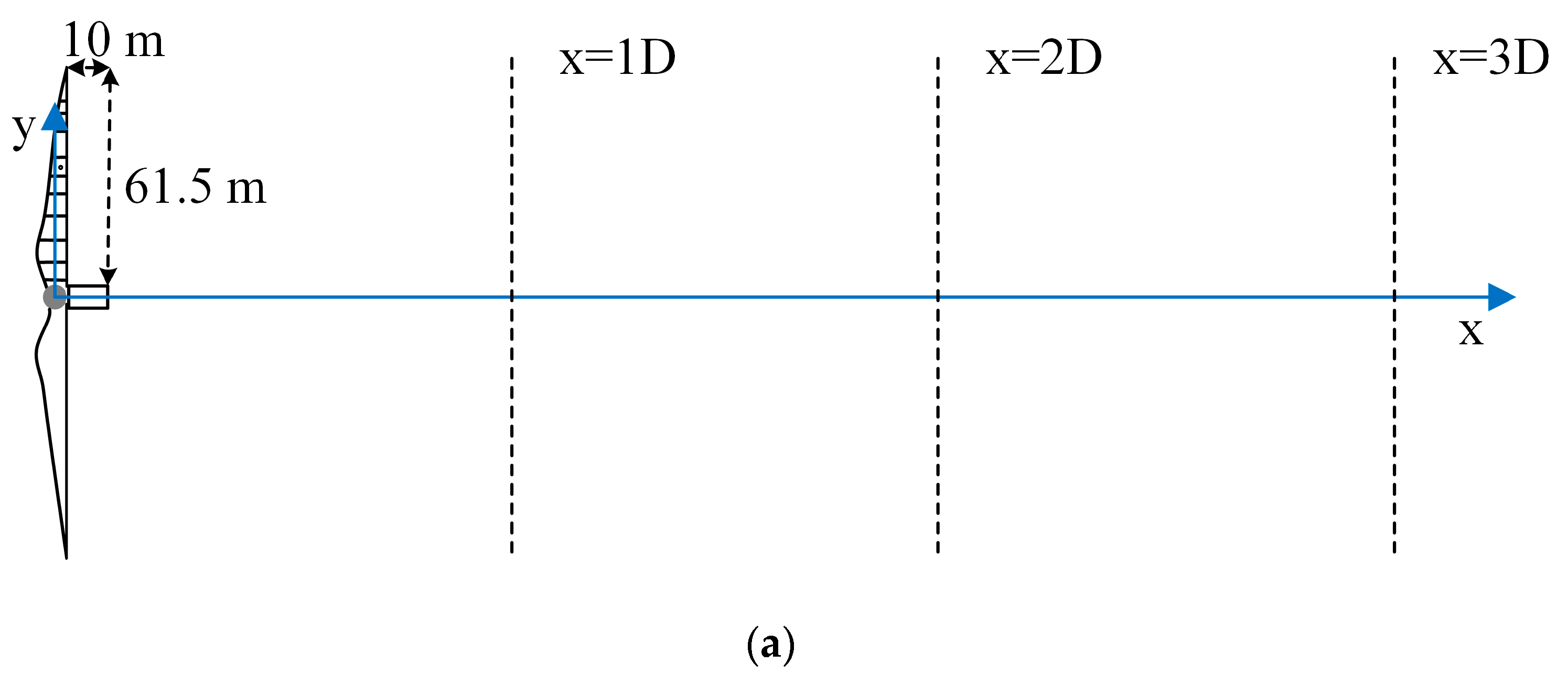
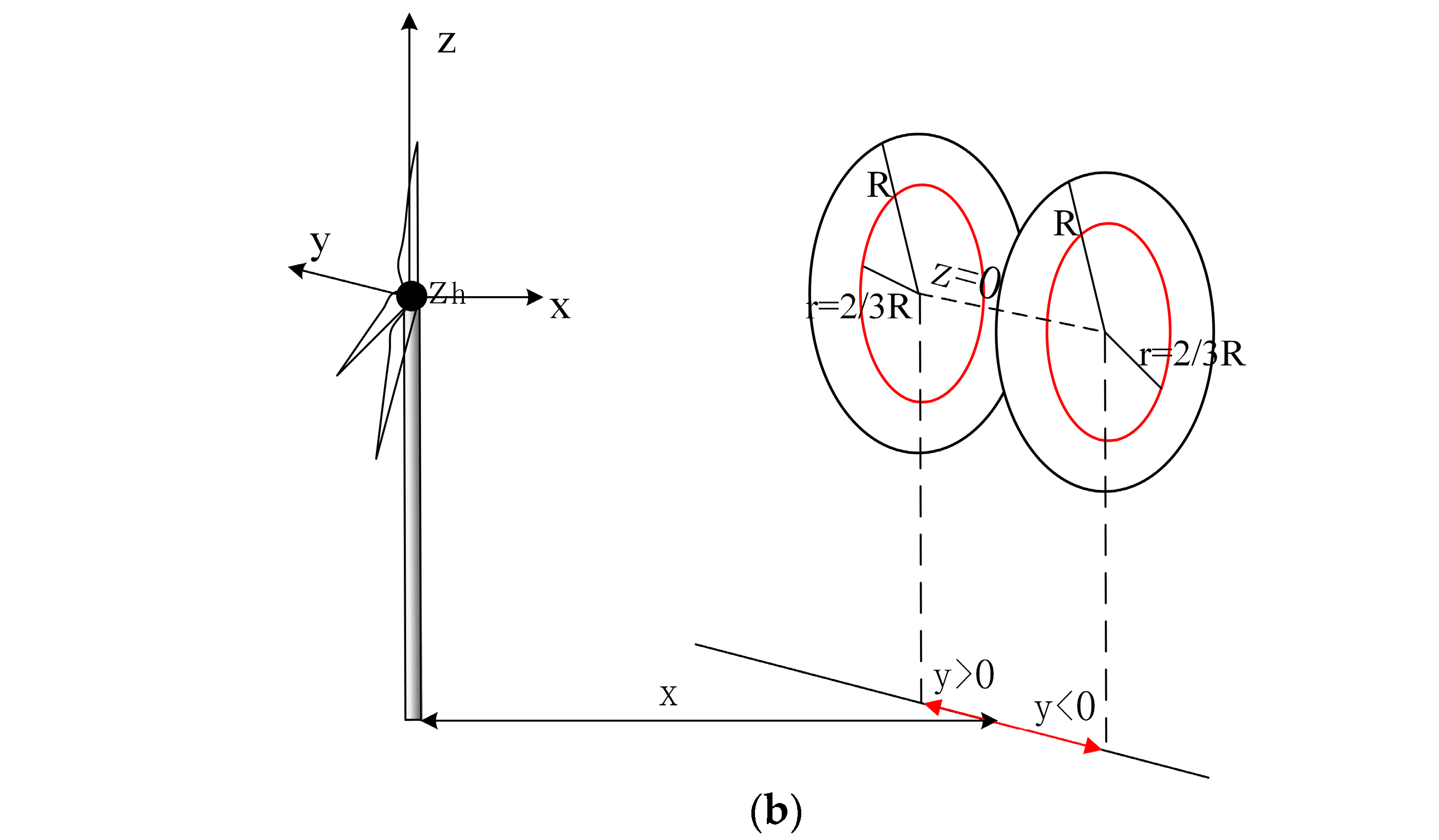
2.1. Initial Wake Distribution Contour
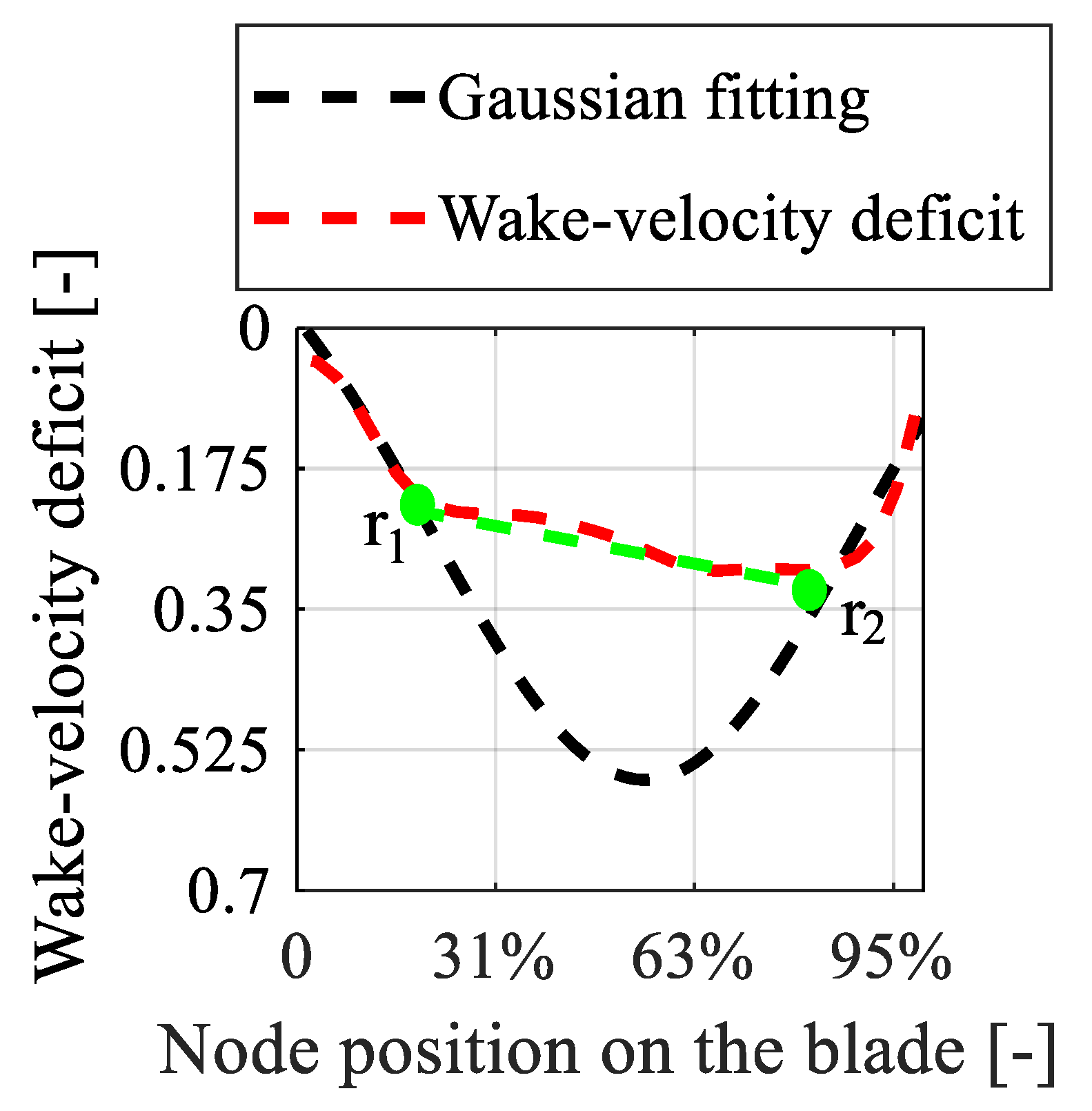
2.2. The Near-Wake Region
2.3. Parameter Determination
3. Optimized-DG Model
3.1. Derivation of Optimized-DG Model
3.2. Considering the Optimized-DG Model with Wind Shear
3.3. Validation of the Optimized-DG Model
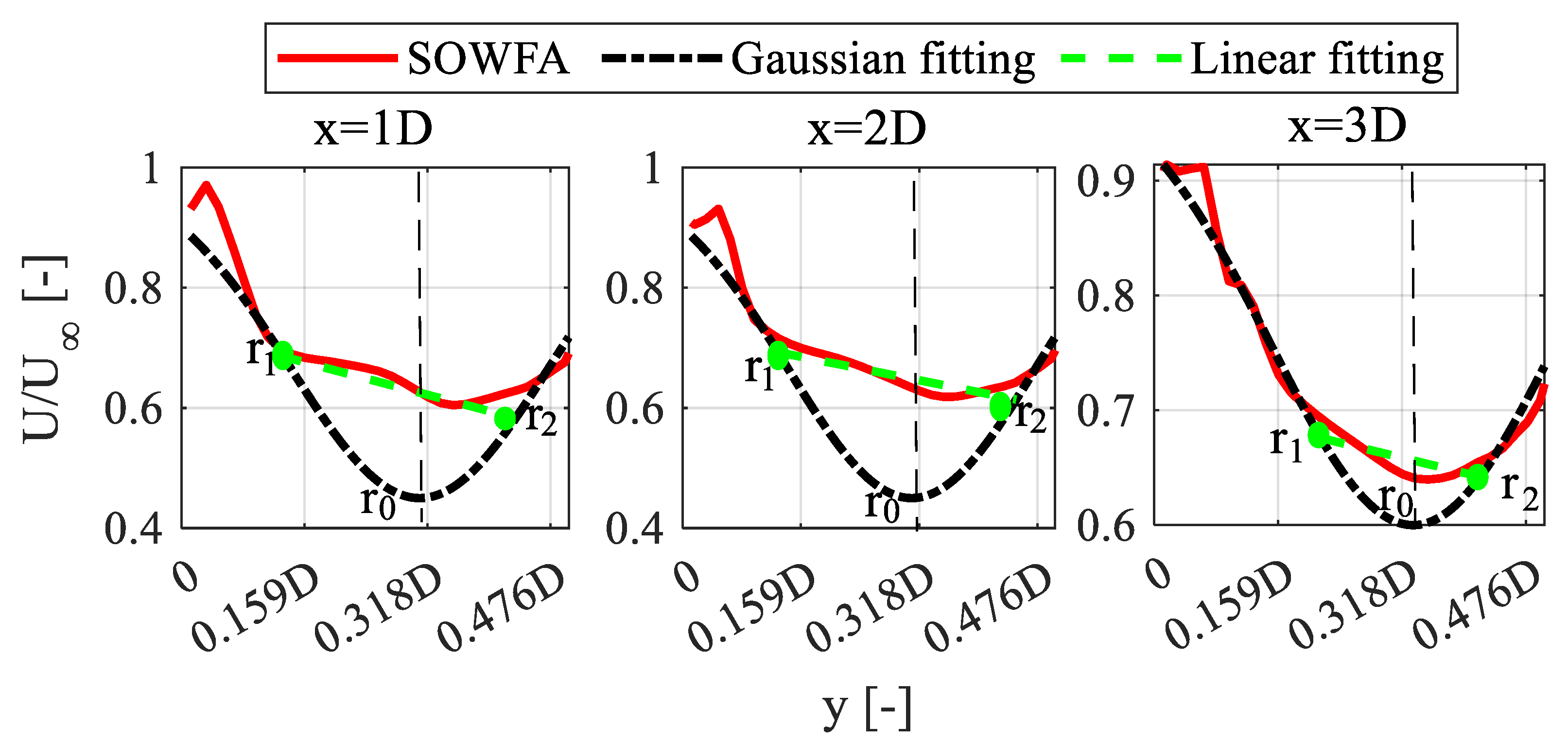
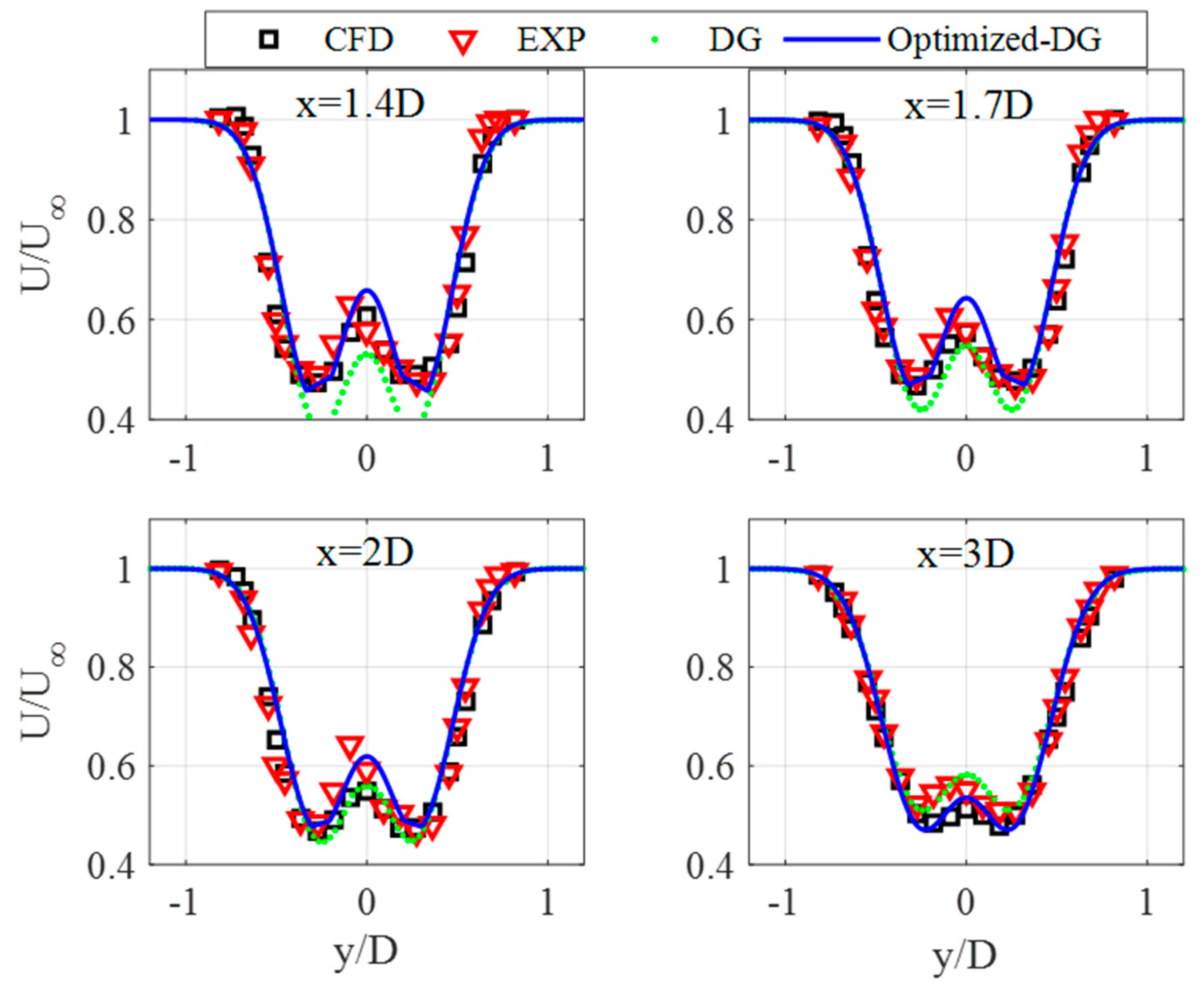
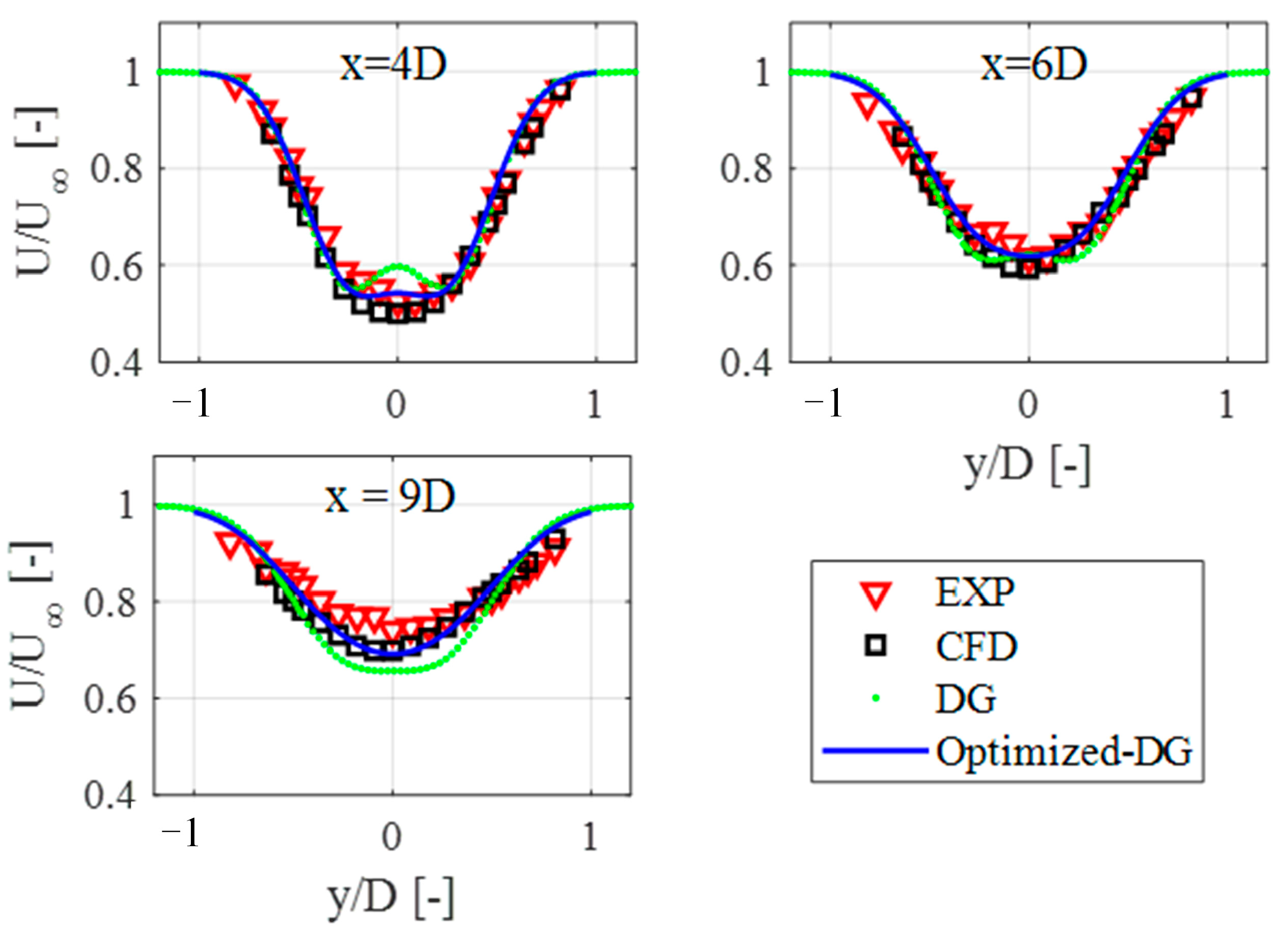
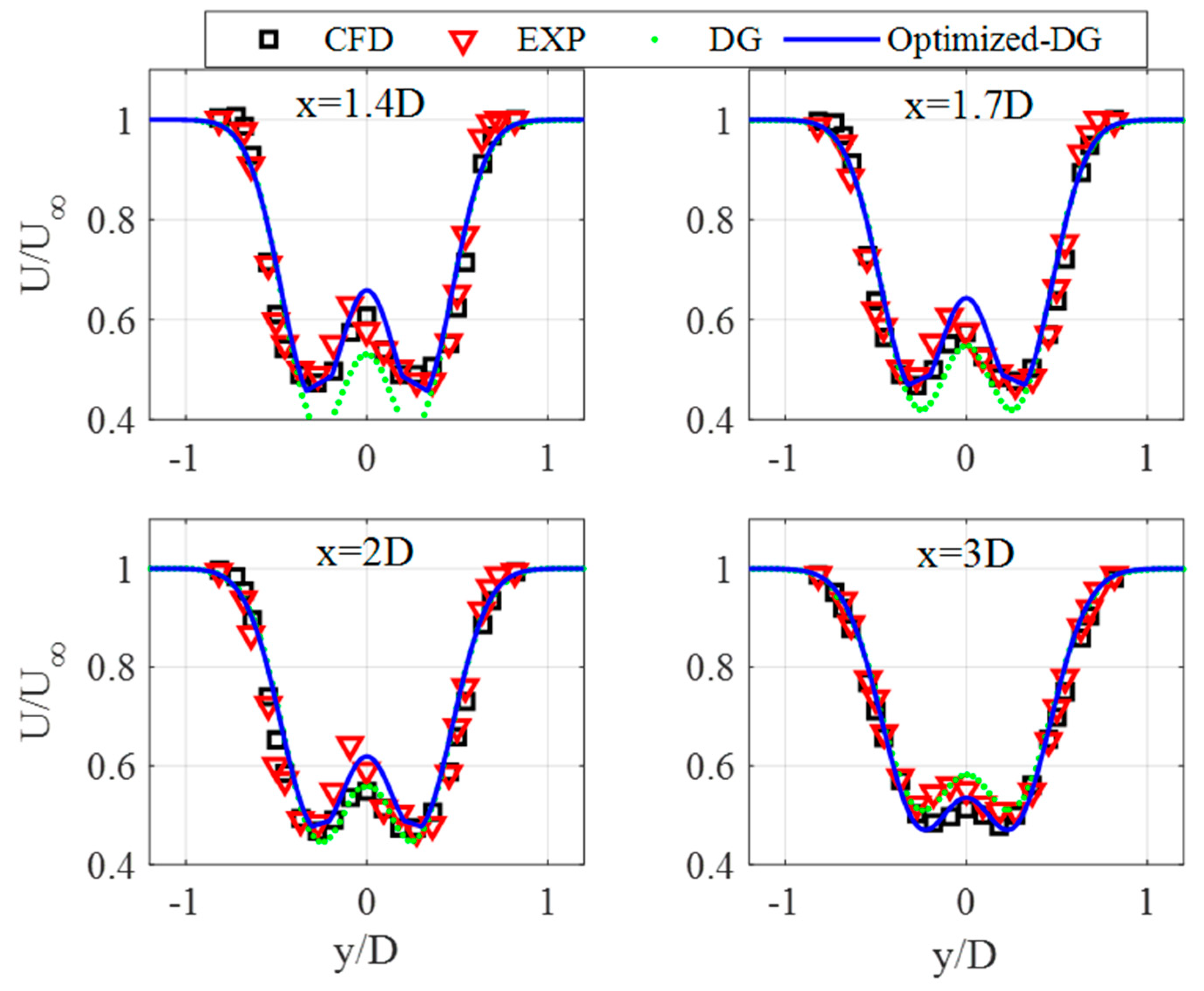
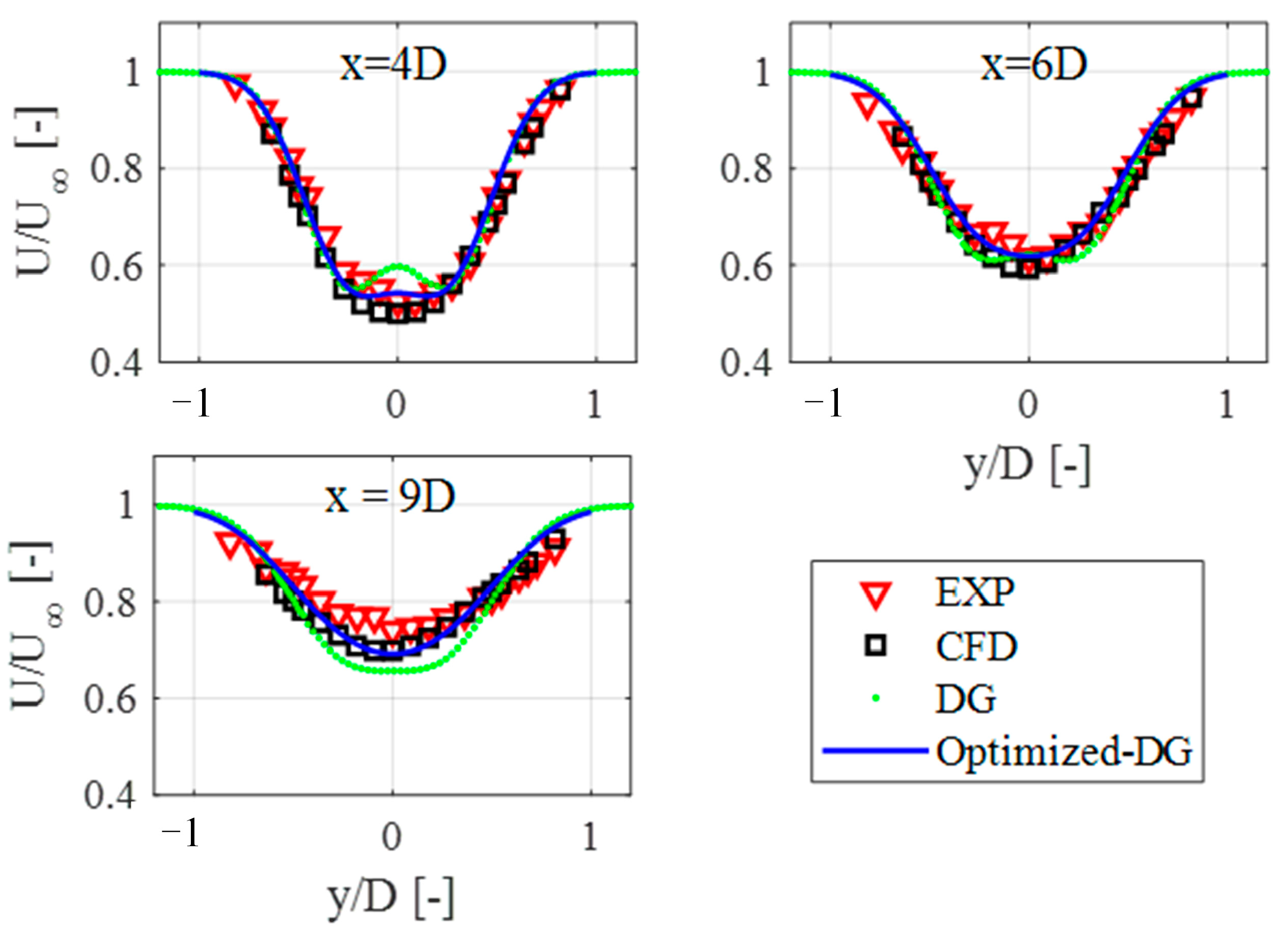
3.3.1. Validation of Horizontal Profile
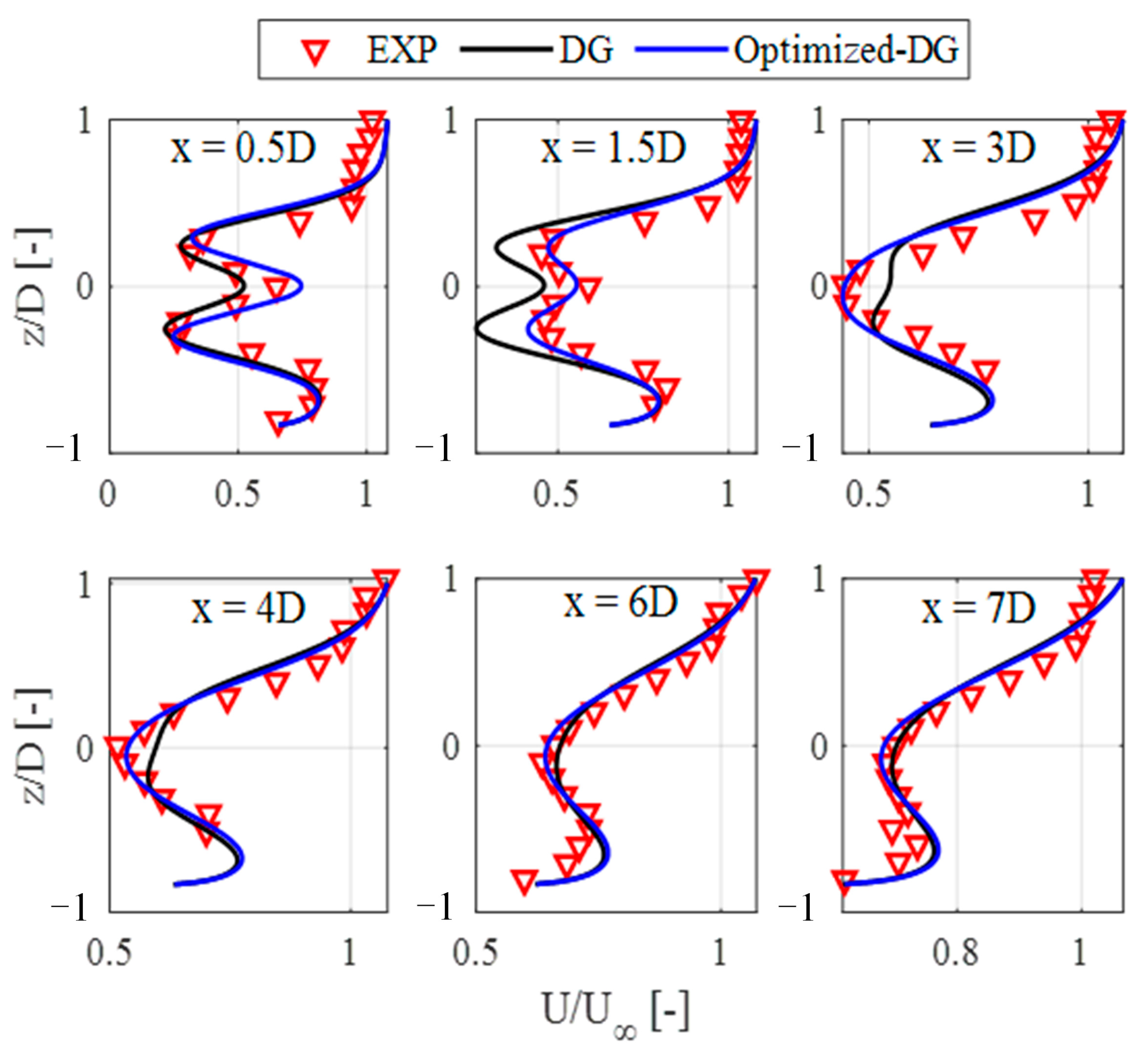
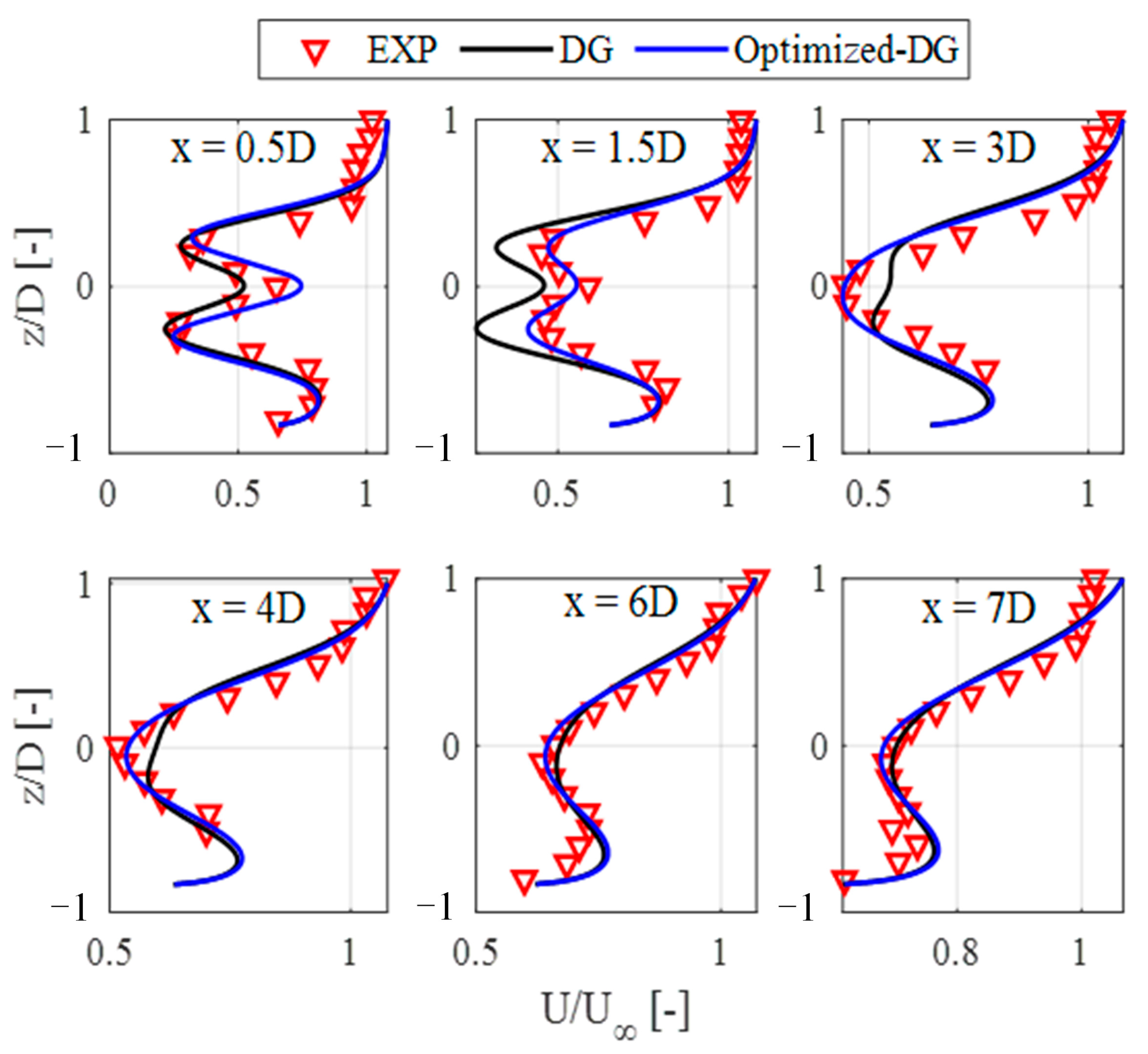
3.3.2. Validation of Vertical Profile
4. Wind Turbine Load and Power Estimation Based on the Optimized-DG Model
4.1. Development and Validation of Blade Root Flap-Wise Moments and Power
4.2. Simulation Settings and Wind Speed Acquisition for Load and Power Estimation
4.3. Rapid Blade Root Flap-Wise Load and Power Estimation Based on Optimized-DG
- (1)
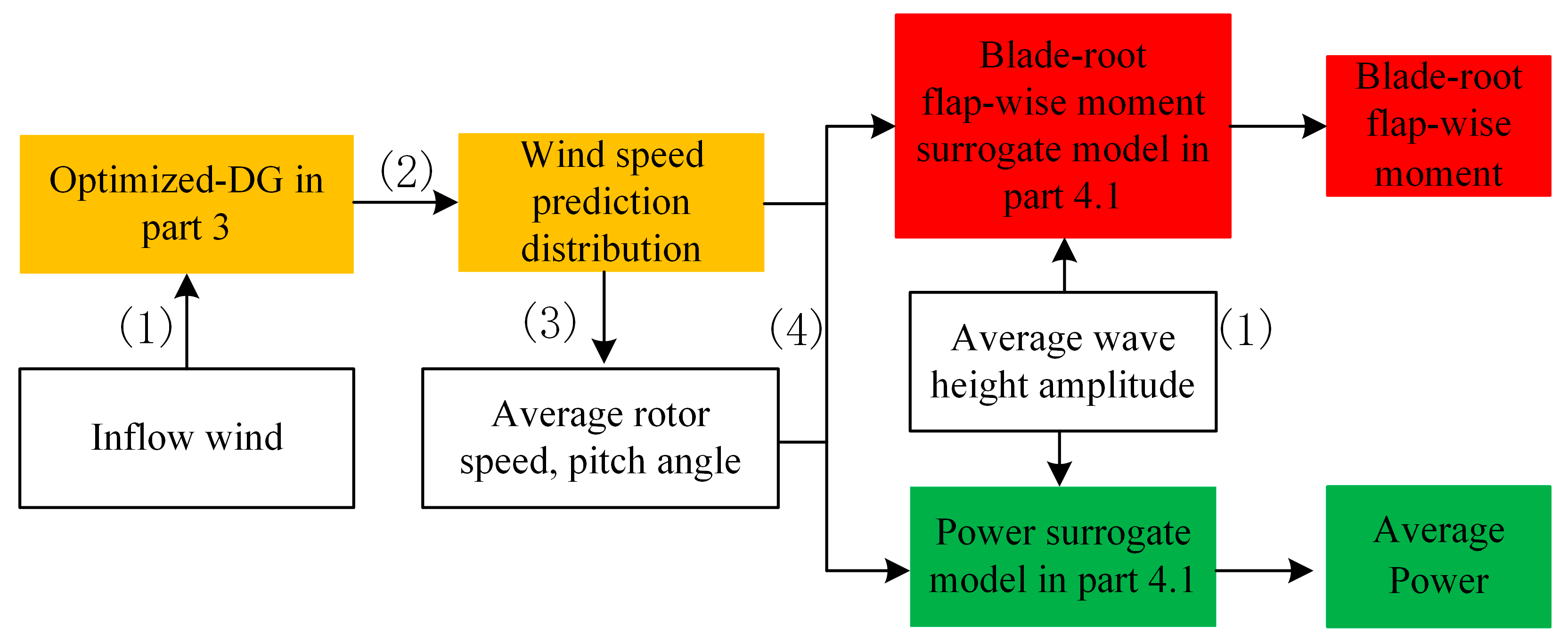
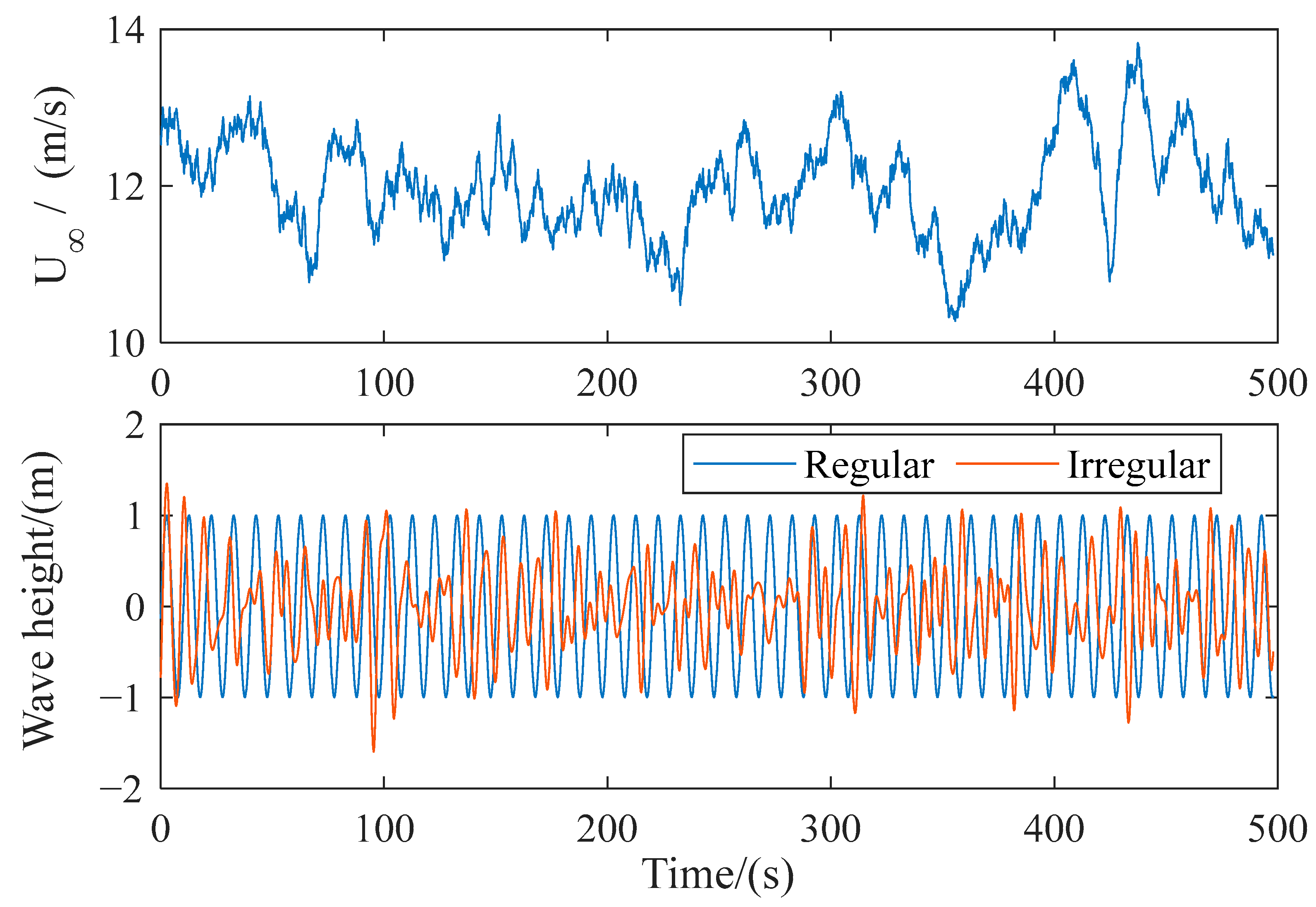
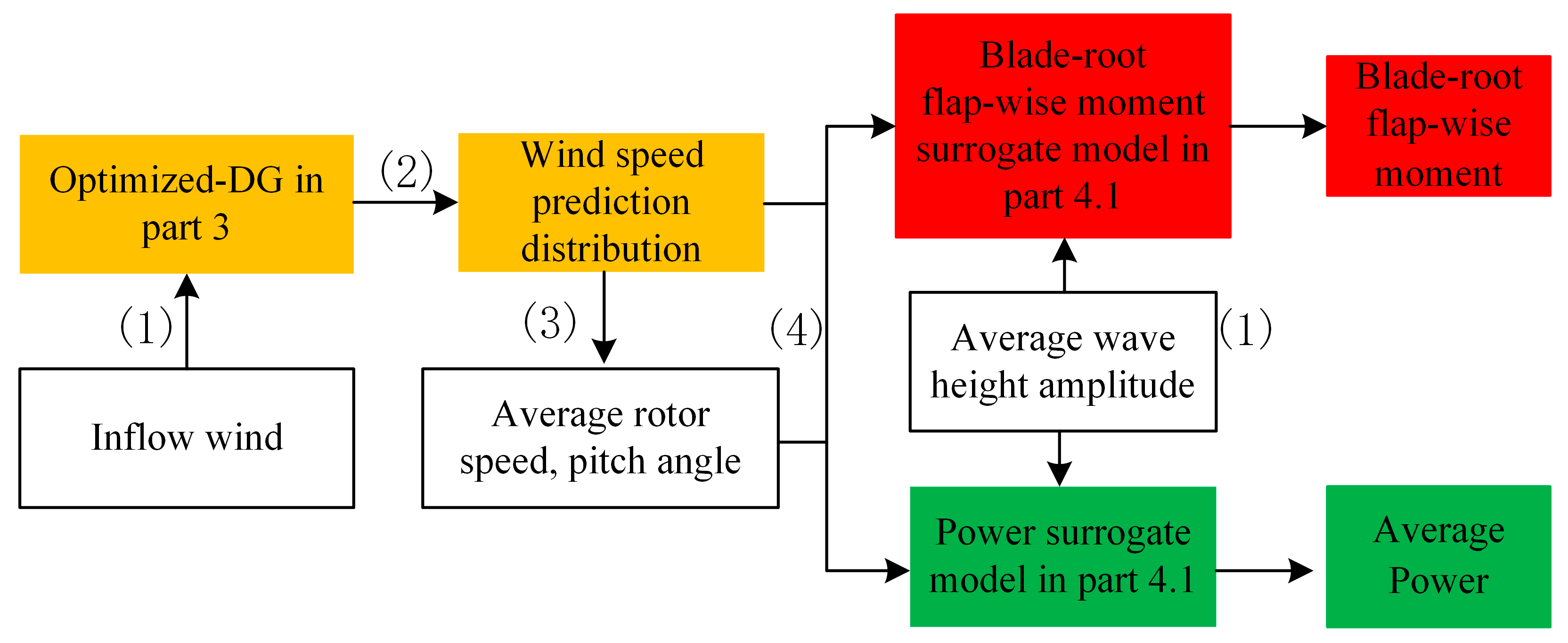
- The inflow wind speed and wave height are obtained from the measured average wind speed and significant wave height at the upwind turbine location.
- (2)
- Fit a wind shear model based on the measured free-stream wind speed. Combine this with the Optimized-DG model in part 3 to jointly compute the wake wind speed distribution on the rotor plane at downstream positions.
- (3)
- Calculate the average wind speed on the rotor plane based on the wake wind speed distribution obtained in (2). Utilize the steady-state response of the wind speed function [5 MW] to determine the corresponding average rotor speed and blade pitch angle for the average wake wind speed [27].
- (4)
- Utilize the proxy model for blade root flap-wise loads and power presented in Section 4.1 to calculate blade root flap-wise loads and power influenced by wake disturbances.
4.4. Simulation Validation
5. Conclusions
- (1)
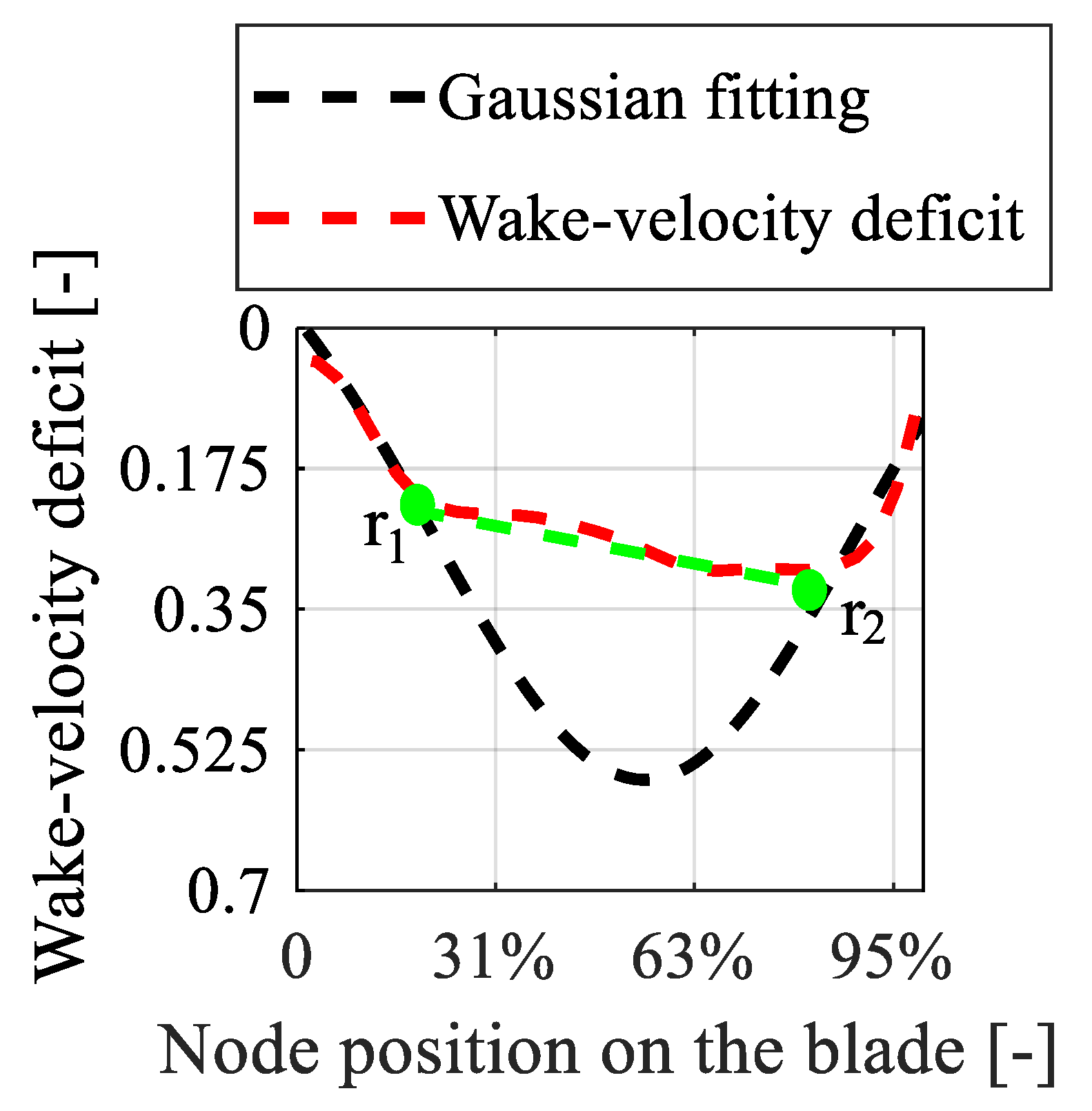
- Establishment of a segmented functional initial wake profile behind the rotor: This study optimizes the profile contours near the extremum points in the near-wake region of the DG wake model. In this region, especially in areas close to the turbine, the wake profile contours are significantly influenced by the blades. Using the wake velocity distribution counter, the initial wake is approximated as a segmented function composed of Gaussian functions and straight lines, leading to a refined wake profile contour near the extremum points.
- (2)
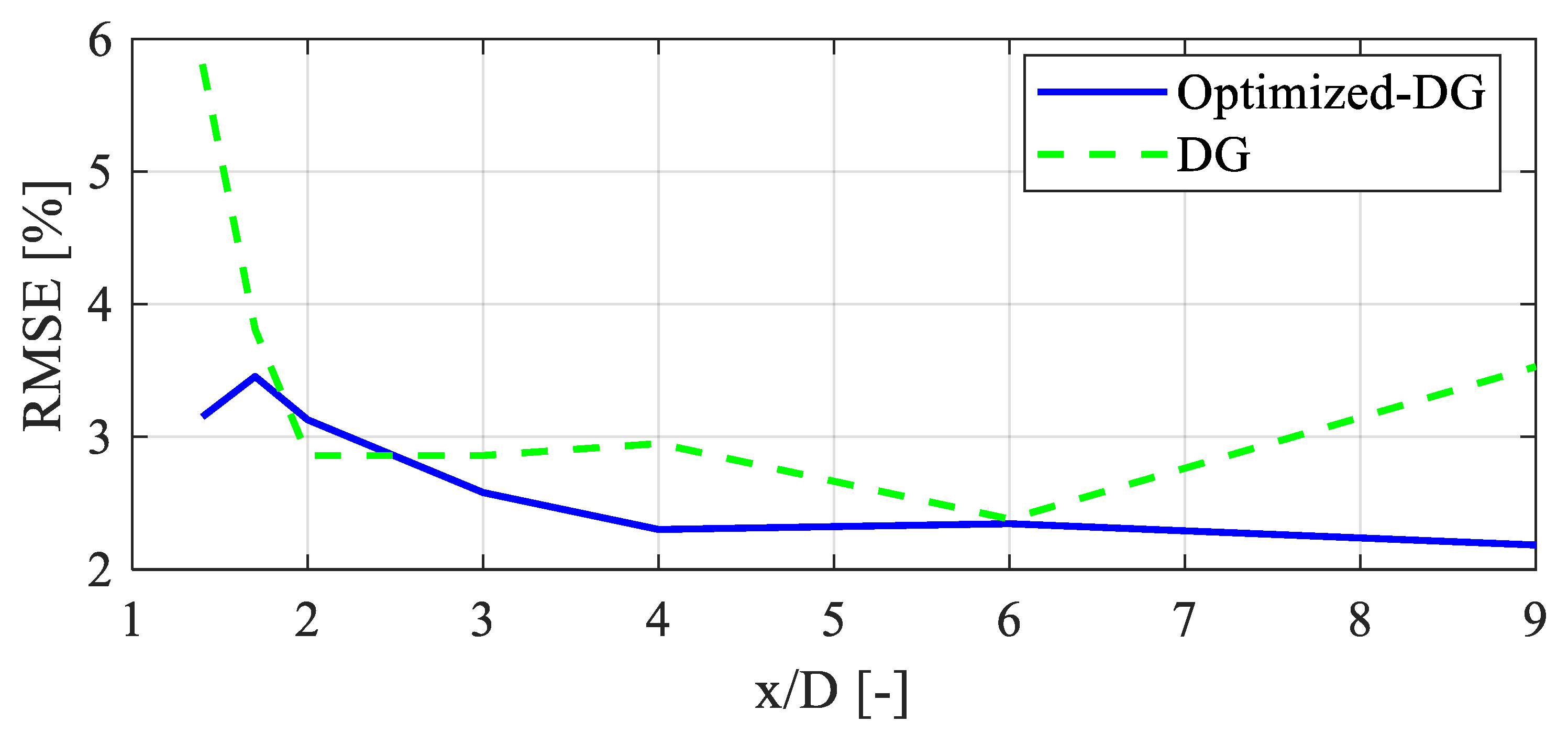
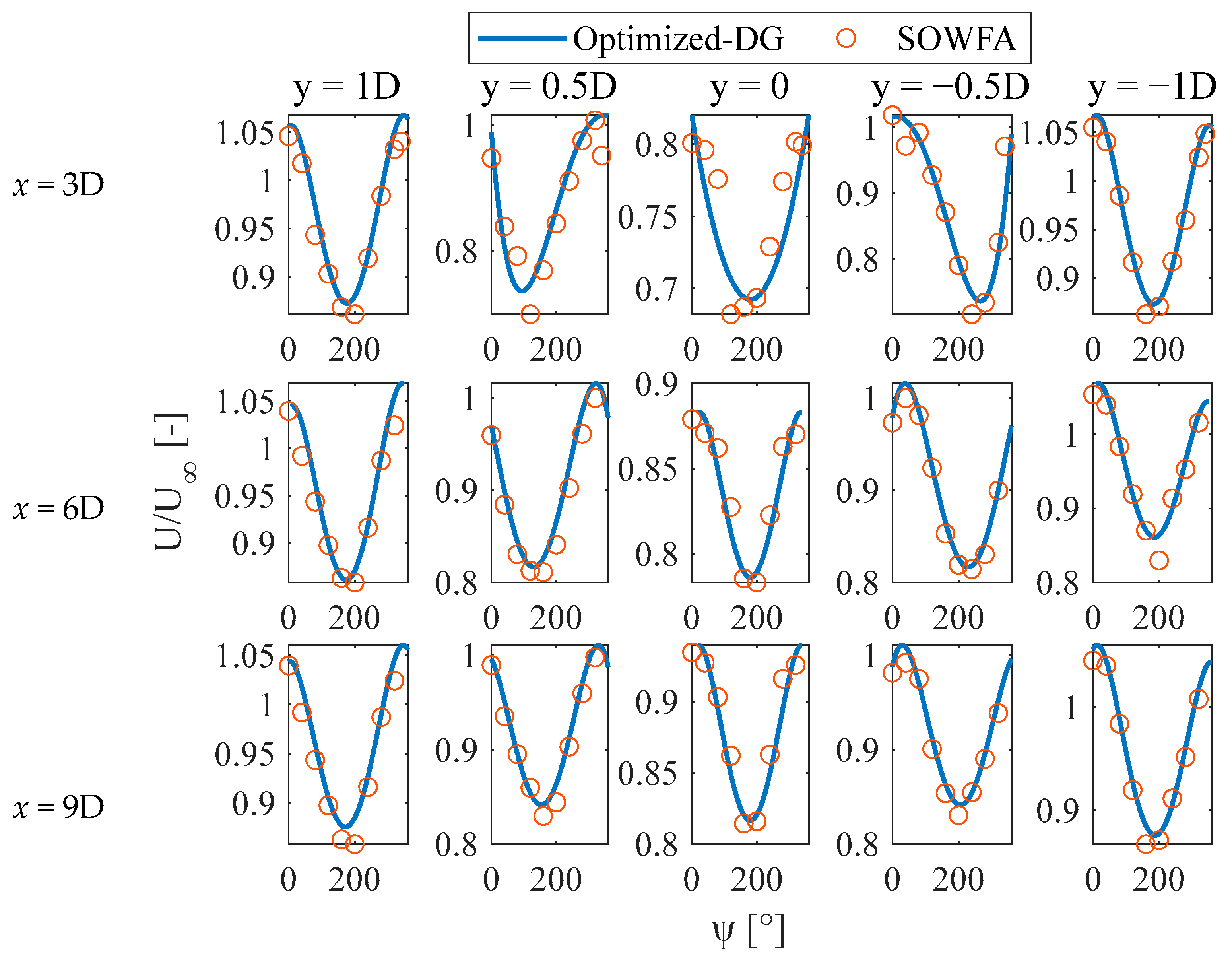
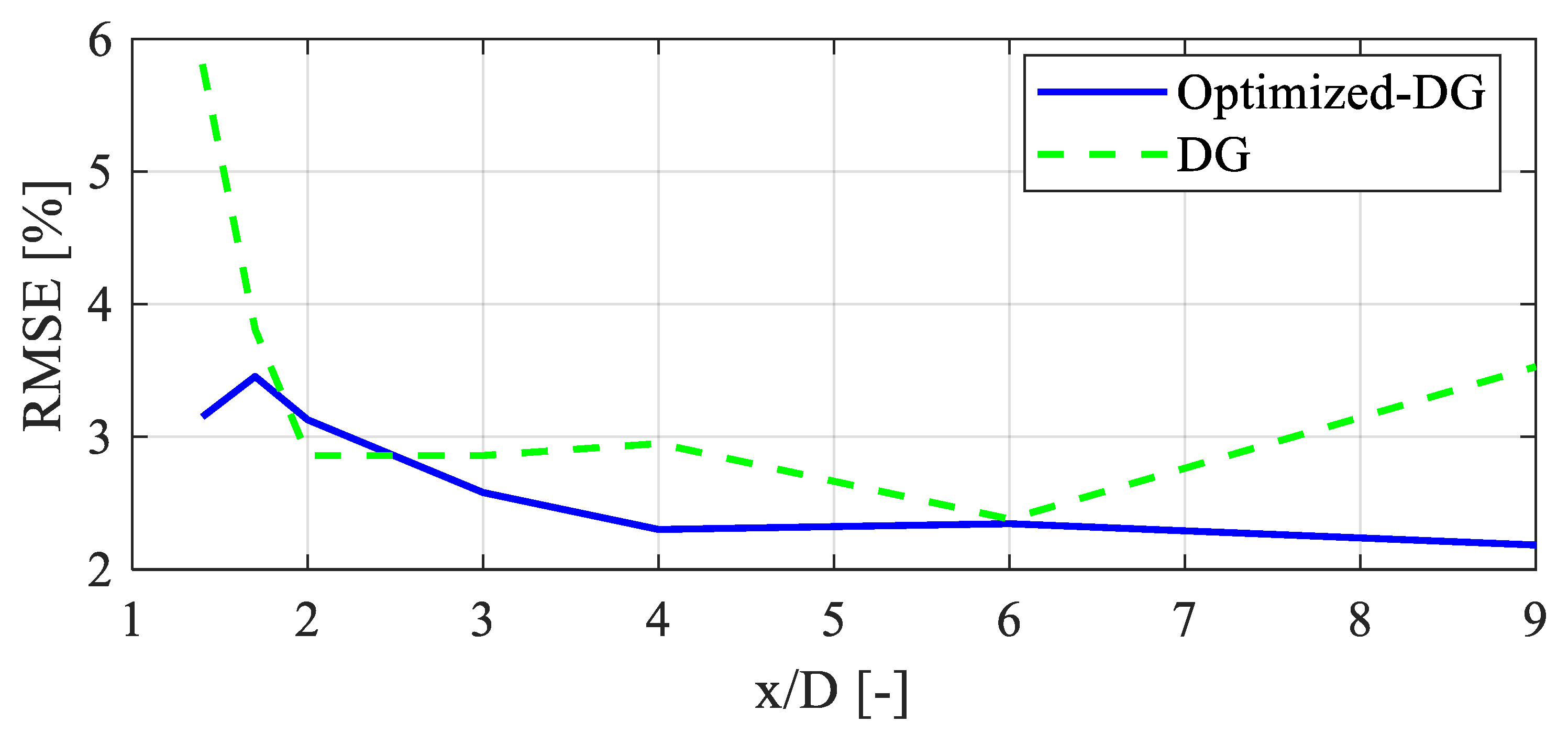
- Correction of the wake spreading function: Considering the spatial transport of the wake as a flow duct, the study defines the flow duct exit position function and the expansion coefficient inside and outside the flow duct based on high-fidelity data identification. The wake spreading function is corrected according to the inside and outside of the flow duct. Combining the redefined near-wake region wake profile and the corrected wake spreading function, a three-dimensional Optimized-DG wake model is established. Validation using SOWFA and experimental data demonstrates the high accuracy of the Optimized-DG model.
- (3)
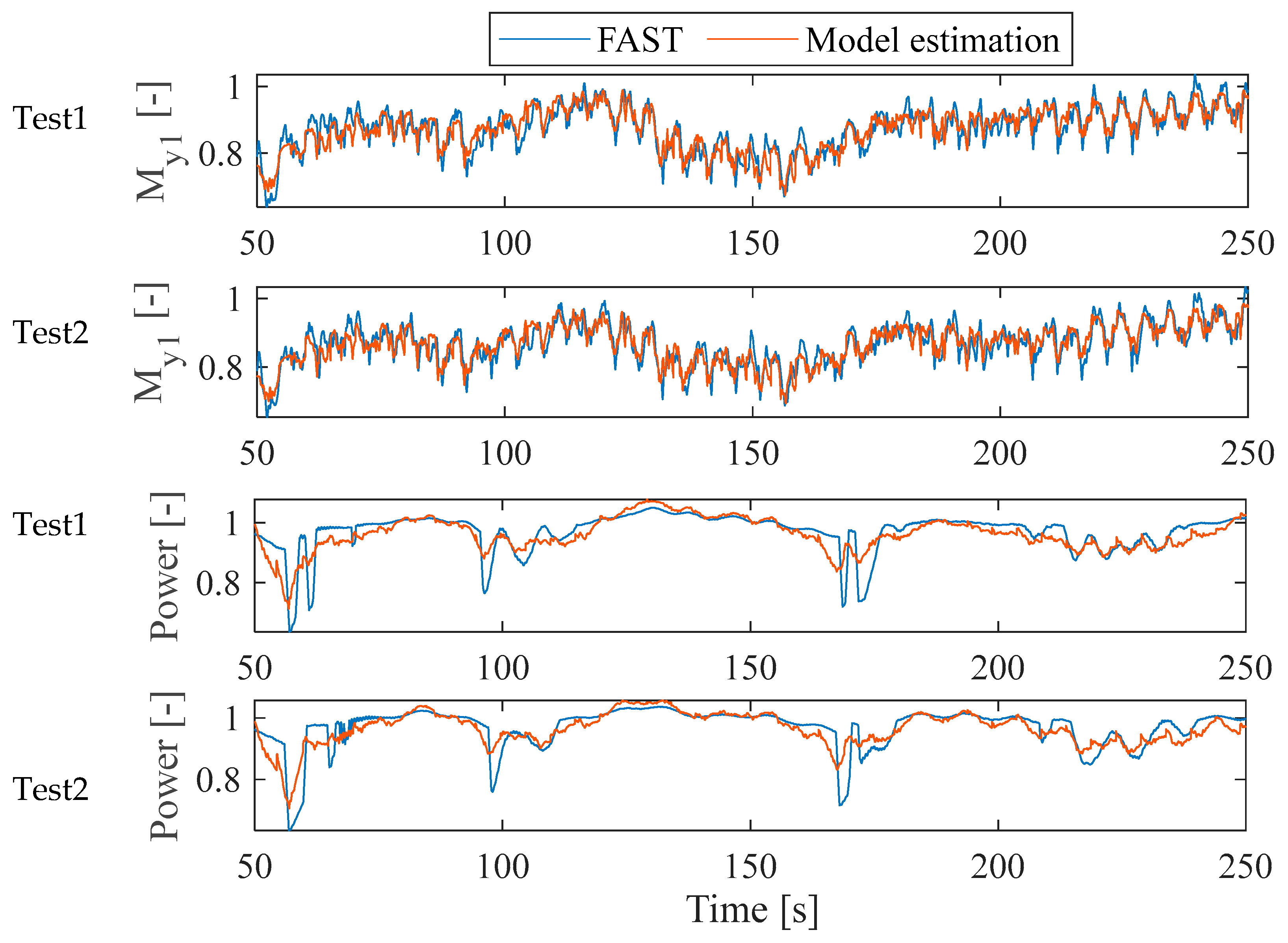
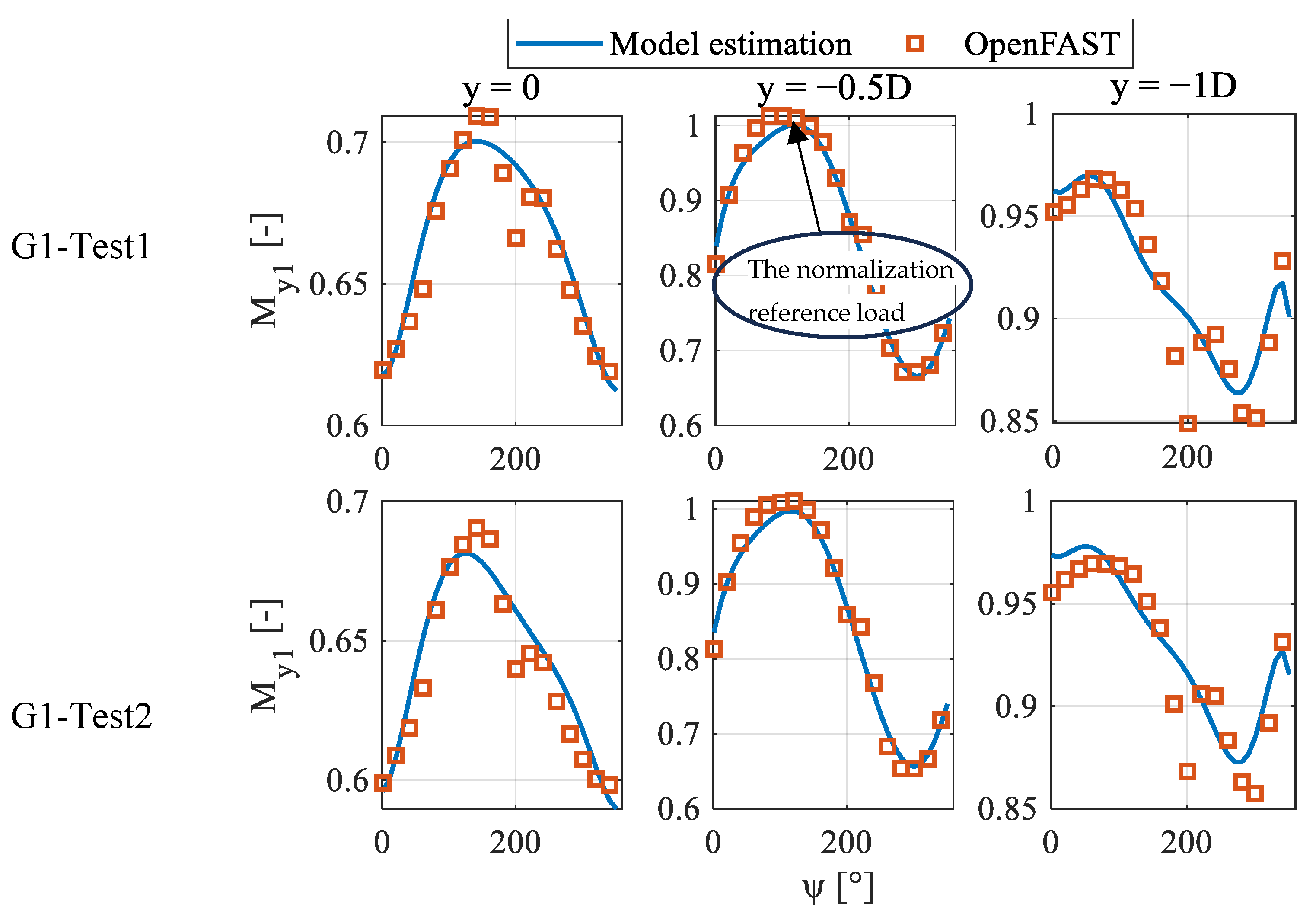
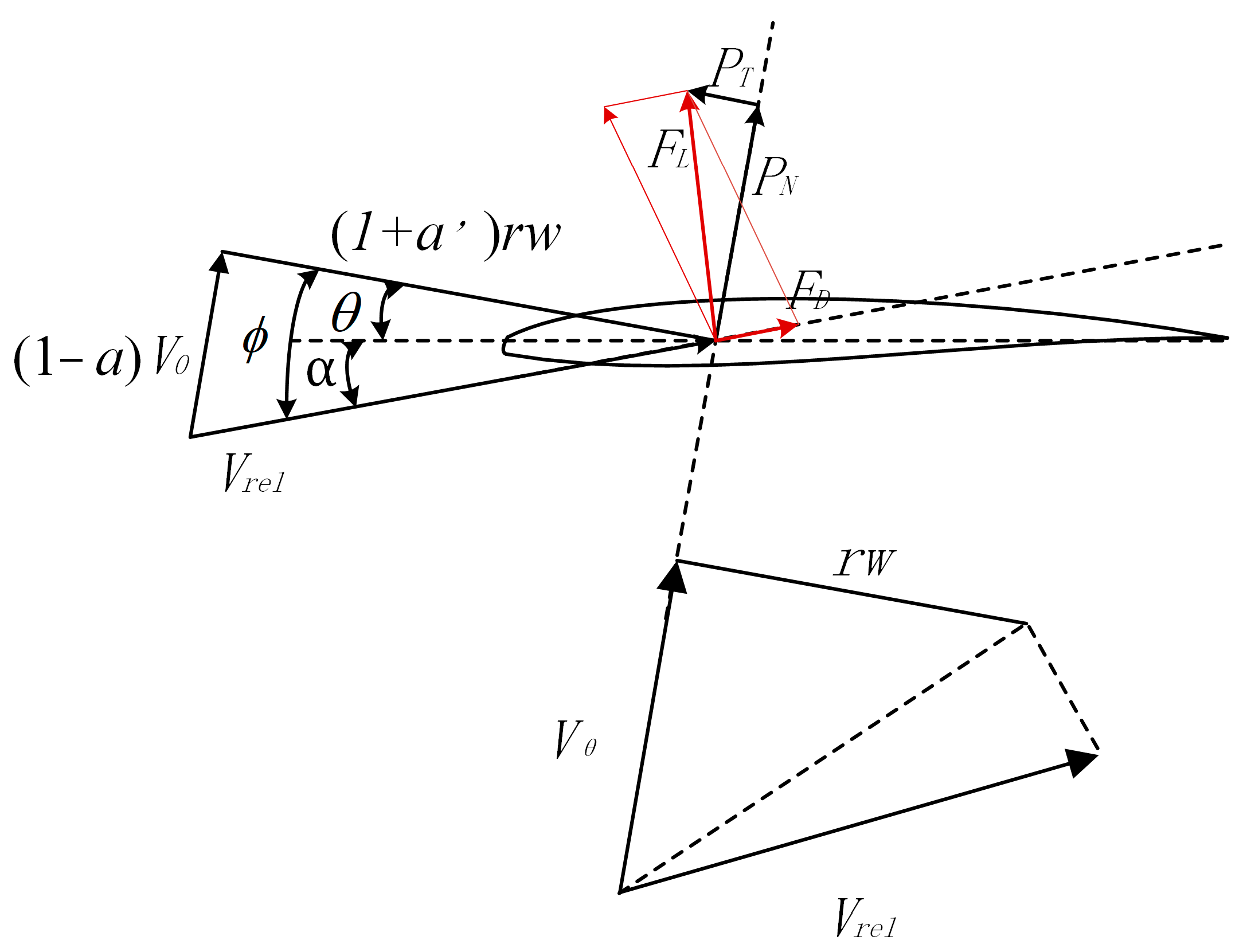
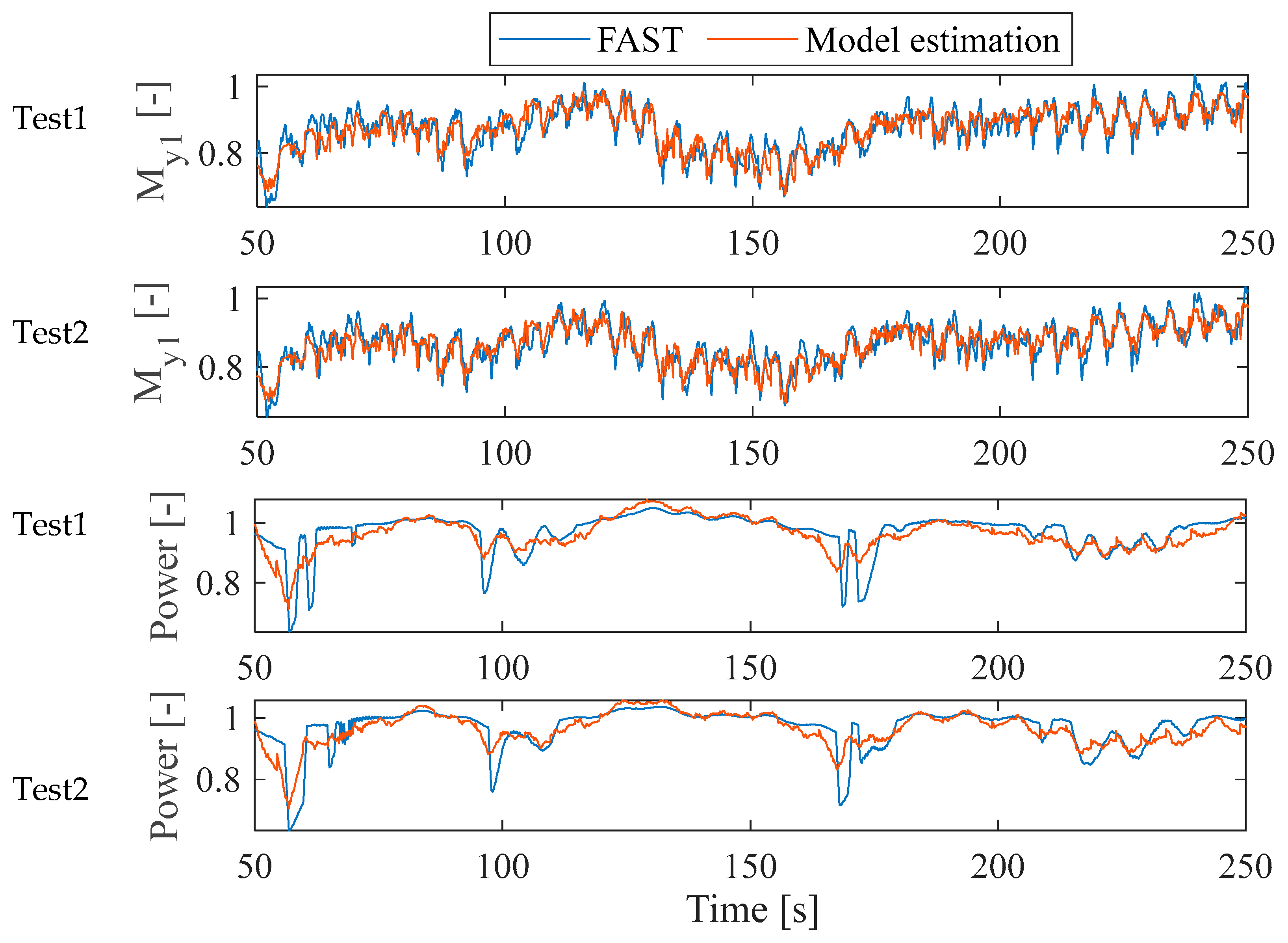
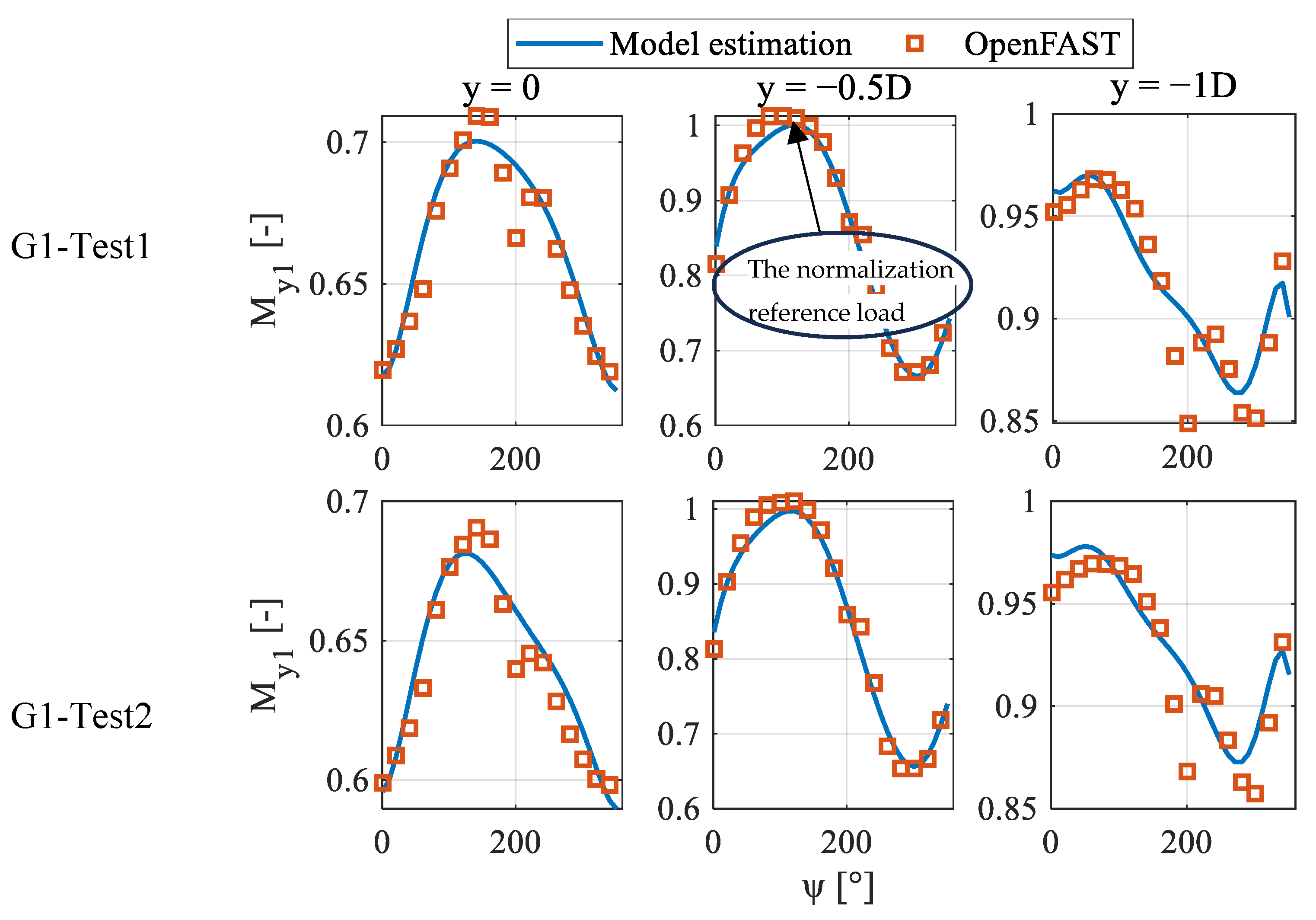
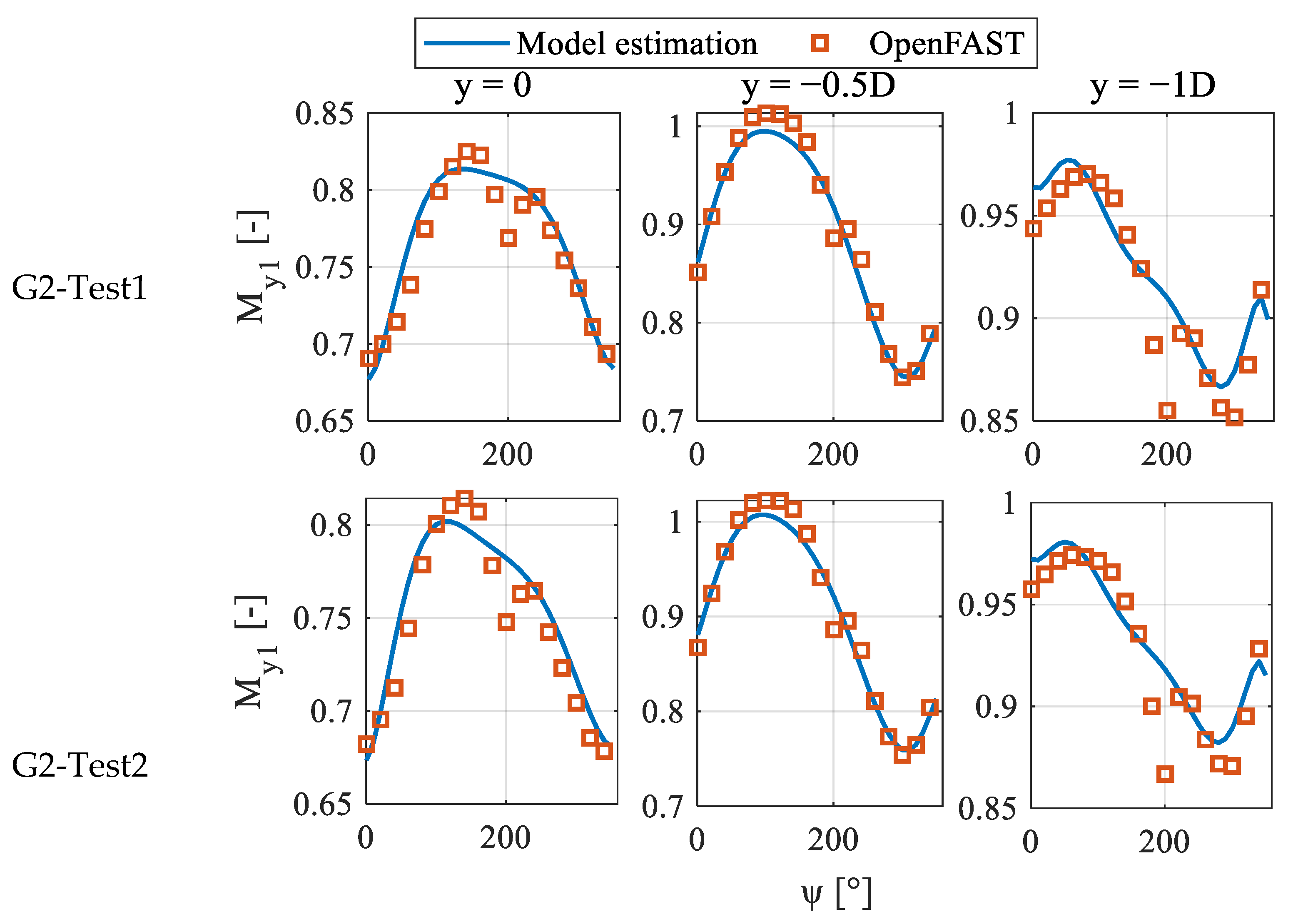
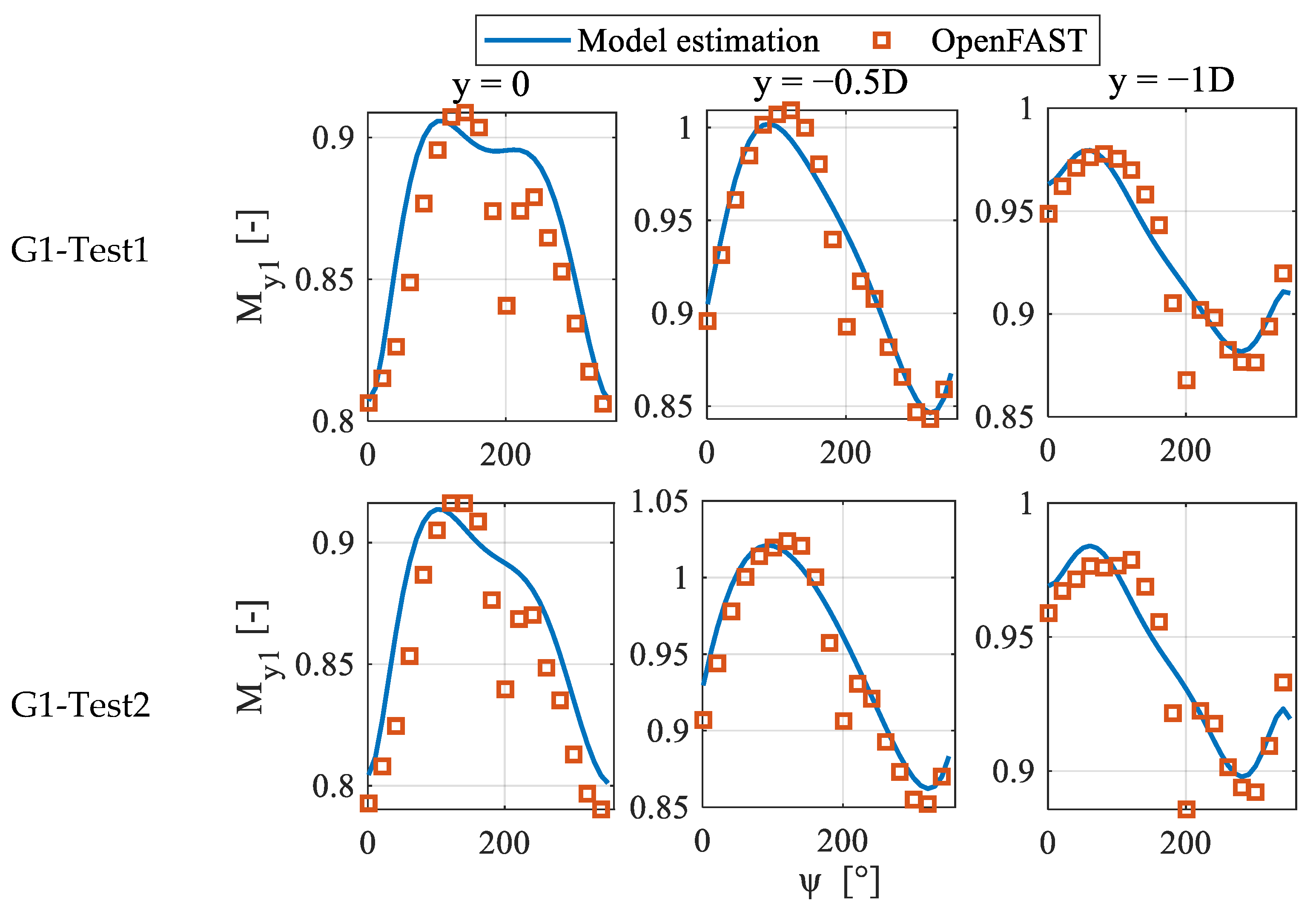
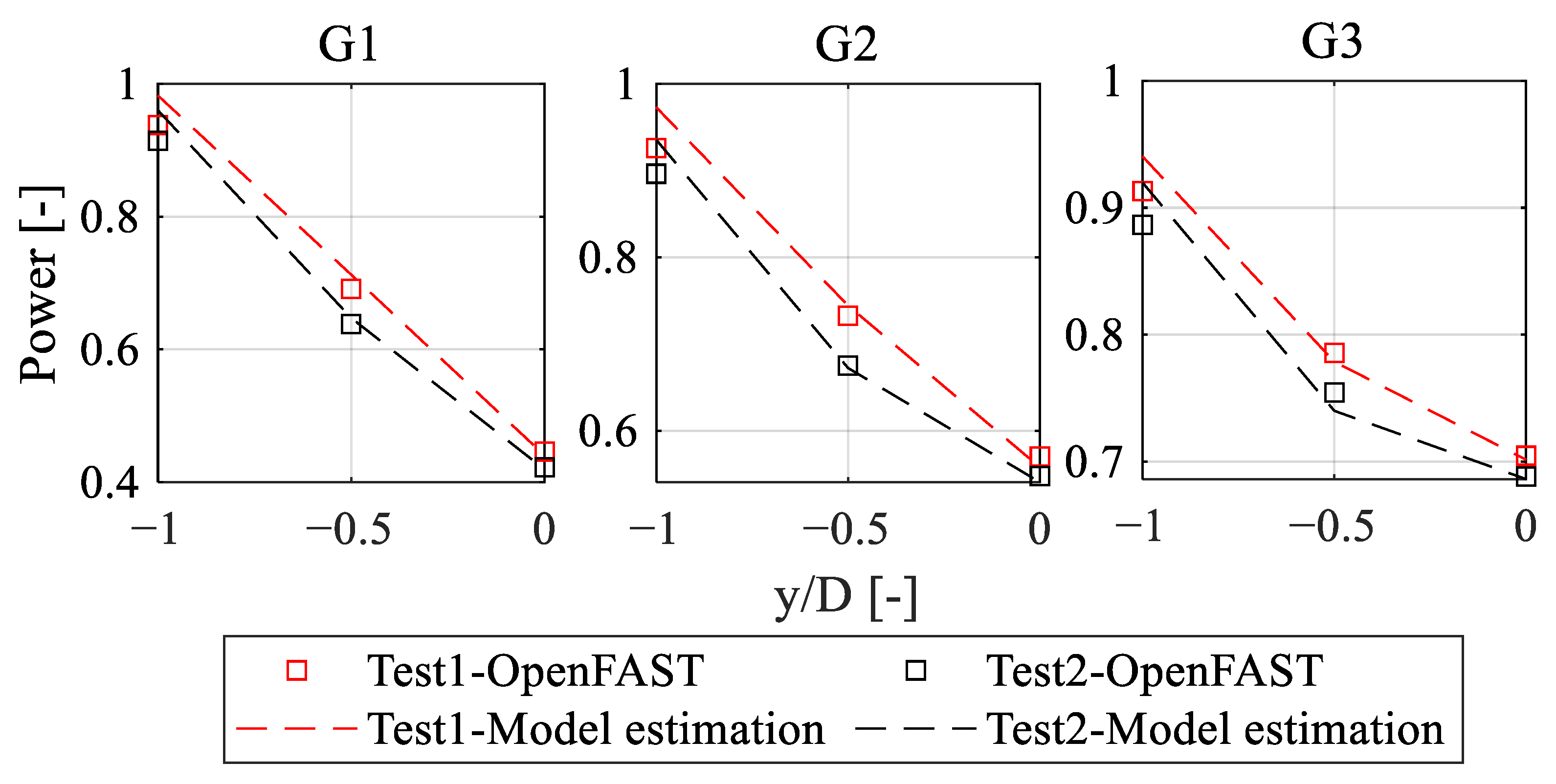
- Introduction of a rapid calculation method for wind turbine fluctuating loads and power estimation under different wake interference: The fluctuations in wind turbine loads caused by wake interference exhibit periodicity, depending on wind turbine rotational speed, wind speed, pitch angle, blade azimuth angle, and wave height. Utilizing the Optimized-DG model for wake velocity prediction, the study provides a fast method to obtain the fluctuating loads varying with blade azimuth angle. Through OpenFAST validation, the proposed model estimation method achieves a maximum error of 10.02% and an average amplitude error of approximately 3.93% in predicting blade root flap-wise loads under wake interference. The maximum error in power estimation is 3%, with an average error of 1%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Symbols
| DG | Double Gaussian |
| CFD | Computational Fluid Dynamics |
| LES | Large Eddy Simulation |
| SOWFA | Simulator fOr Wind Farm Applications |
| EXP | experimental data |
| RMSE | root mean square error |
| BEM | Blade Element Momentum |
References
- Zhao, L.; Xue, L.; Li, Z.; Wang, J.; Yang, Z.; Xue, Y. Progress on Offshore Wind Farm Dynamic Wake Management for Energy. J. Mar. Sci. Eng. 2022, 10, 1395. [Google Scholar] [CrossRef]
- Chanprasert, W.; Sharma, R.; Cater, J.; Norris, S. Large Eddy Simulation of wind turbine fatigue loading and yaw dynamics induced by wake turbulence. Renew. Energy 2022, 190, 208–222. [Google Scholar] [CrossRef]
- Kim, S.-H.; Shin, H.-K.; Joo, Y.-C.; Kim, K.-H. A study of the wake effects on the wind characteristics and fatigue loads for the turbines in a wind farm. Renew. Energy 2015, 74, 536–543. [Google Scholar] [CrossRef]
- Xue, L.; Wang, J.; Zhao, L.; Wei, Z.; Yu, M.; Xue, Y. Wake Interactions of Two Tandem Semisubmersible Floating Offshore Wind Turbines Based on FAST. Farm. J. Mar. Sci. Eng. 2022, 10, 1962. [Google Scholar] [CrossRef]
- Zhao, L.; Gong, F.; Chen, S.; Wang, J.; Xue, L.; Xue, Y. Optimization study of control strategy for combined multi-wind turbines energy production and loads during wake effects. Energy Rep. 2022, 8, 1098–1107. [Google Scholar] [CrossRef]
- Zhao, L.; Gong, Y.; Gong, F.; Zheng, B.; Wang, J.; Xue, L.; Xue, Y. Study on Mitigation of Wake Interference by Combined Control of Yaw Misalignment and Pitch. J. Mar. Sci. Eng. 2023, 11, 1288. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Shaler, K. Fast. Farm User’s Guide and Theory Manual; National Renewable Energy Laboratory: Golden, CO, USA, 2021. [Google Scholar]
- Kretschmer, M.; Jonkman, J.; Pettas, V.; Cheng, P.W. FAST.Farm load validation for single wake situations at alpha ventus. Wind Energy Sci. Discuss. 2021, 6, 1–20. [Google Scholar]
- Jensen, N.O. A Note on Wind Generator Interaction; Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Shakoor, R.; Hassan, M.Y.; Raheem, A.; Wu, Y.-K. Wake effect modeling: A review of wind farm layout optimization using Jensen׳s model. Renew. Sustain. Energy Rev. 2016, 58, 1048–1059. [Google Scholar] [CrossRef]
- Archer, C.L.; Vasel-Be-Hagh, A.; Yan, C.; Wu, S.; Pan, Y.; Brodie, J.F.; Maguire, A.E. Review and evaluation of wake loss models for wind energy applications. Appl. Energy 2018, 226, 1187–1207. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Li, L.; Huang, Z.; Ge, M.; Zhang, Q. A novel three-dimensional analytical model of the added streamwise turbulence intensity for wind-turbine wakes. Energy 2022, 238, 121806. [Google Scholar] [CrossRef]
- Wang, T.; Cai, C.; Wang, X.; Wang, Z.; Chen, Y.; Song, J.; Xu, J.; Zhang, Y.; Li, Q. A new Gaussian analytical wake model validated by wind tunnel experiment and LiDAR field measurements under different turbulent flow. Energy 2023, 271, 127089. [Google Scholar] [CrossRef]
- He, R.; Deng, X.; Li, Y.; Dong, Z.; Gao, X.; Lu, L.; Zhou, Y.; Wu, J.; Yang, H. Three-Dimensional Yaw Wake Model Development with Validations from Wind Tunnel Experiments. Energy 2023, 282, 128402. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, S.; Li, L.; Xu, S.; Chen, Y.; Zhu, X.; Sun, H.; Wang, Y.; Lu, H. Quantification of 3D spatiotemporal inhomogeneity for wake characteristics with validations from field measurement and wind tunnel test. Energy 2022, 254, 124277. [Google Scholar] [CrossRef]
- Keane, A.; Aguirre, P.E.O.; Ferchland, H.; Clive, P.; Gallacher, D. An analytical model for a full wind turbine wake. Proc. J. Phys. Conf. Ser. 2016, 753, 032039. [Google Scholar] [CrossRef]
- Keane, A. Advancement of an analytical double-Gaussian full wind turbine wake model. Renew. Energy 2021, 171, 687–708. [Google Scholar] [CrossRef]
- Sadek, Z.; Scott, R.; Hamilton, N.; Cal, R.B. A three-dimensional, analytical wind turbine wake model: Flow acceleration, empirical correlations, and continuity. Renew. Energy 2023, 209, 298–309. [Google Scholar] [CrossRef]
- Schreiber, J.; Balbaa, A.; Bottasso, C.L. Brief communication: A double-Gaussian wake model. Wind Energy Sci. 2020, 5, 237–244. [Google Scholar] [CrossRef]
- Jonkman, J. The new modularization framework for the FAST wind turbine CAE tool. In Proceedings of the 51st AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; p. 202. [Google Scholar]
- Churchfield, M.J.; Sang, L.; Moriarty, P.J. Adding Complex Terrain and Stable Atmospheric Condition Capability to the OpenFOAM-Based Flow Solver of the Simulator for on/offshore Wind Farm Applications (SOWFA); National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2013. [Google Scholar]
- Zhang, S.; Gao, X.; Lin, J.; Xu, S.; Zhu, X.; Sun, H.; Yang, H.; Wang, Y.; Lu, H. Discussion on the spatial-temporal inhomogeneity characteristic of horizontal-axis wind turbine’s wake and improvement of four typical wake models. J. Wind Eng. Ind. Aerodyn. 2023, 236, 105368. [Google Scholar] [CrossRef]
- Sun, W.; Li, Y.; Shi, Q.; Ouyang, T.; Ma, L. Passive aeroelastic study of large and flexible wind turbine blades for load reduction. Structures 2023, 58, 105331. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Hayman, G.; Jonkman, B.; Damiani, R.; Murray, R. AeroDyn v15 User’s Guide and Theory Manual; NREL Draft Report; National Renewable Energy Laboratory: Golden, CO, USA, 2015. [Google Scholar]
- Bottasso, C.; Cacciola, S.; Schreiber, J. Local wind speed estimation, with application to wake impingement detection. Renew. Energy 2018, 116, 155–168. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiments | Sea Conditions |
|---|---|
| Test 1 | Regular waves |
| Test 2 | Irregular waves |
| Description | Unit | Value |
|---|---|---|
| Rated power | MW | 5 |
| Rotor diameter/hub diameter | m | 126/3 |
| Cut-in/Rated/cut-out wind speed | m/s | 3/11.4/25 |
| Hub Center Wind Speed | m/s | 12 |
| Atmospheric Turbulence Intensity | 6% | |
| Wind shear | 0.13 | |
| Thrust Coefficient () | 0.72 |
| Description | Unit | Value |
|---|---|---|
| Horizontal Spatial Dimensions of the Turbine | m2 | 500 × 500 |
| Simulation Space Size | km3 | 2.5 × 1.25 × 1.25 |
| Simulation Grid Division | 800 × 400 × 400 | |
| Simulation Grid Size of Locally refined region | m | 3.125 |
| Time step | s | 0.5 |
| Group | Test | x | y | Wave Type |
|---|---|---|---|---|
| G1 | Test 1 | 0/−0.5D/−1D | regular | |
| Test 2 | 0/−0.5D/−1D | irregular | ||
| G2 | Test 1 | 0/−0.5D/−1D | regular | |
| Test 2 | 0/−0.5D/−1D | irregular | ||
| G3 | Test 1 | 0/−0.5D/−1D | regular | |
| Test 2 | 0/−0.5D/−1D | irregular |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Gong, Y.; Li, Z.; Wang, J.; Xue, L.; Xue, Y. Rapid Estimation Model for Wake Disturbances in Offshore Floating Wind Turbines. J. Mar. Sci. Eng. 2024, 12, 647. https://doi.org/10.3390/jmse12040647
Zhao L, Gong Y, Li Z, Wang J, Xue L, Xue Y. Rapid Estimation Model for Wake Disturbances in Offshore Floating Wind Turbines. Journal of Marine Science and Engineering. 2024; 12(4):647. https://doi.org/10.3390/jmse12040647
Chicago/Turabian StyleZhao, Liye, Yongxiang Gong, Zhiqian Li, Jundong Wang, Lei Xue, and Yu Xue. 2024. "Rapid Estimation Model for Wake Disturbances in Offshore Floating Wind Turbines" Journal of Marine Science and Engineering 12, no. 4: 647. https://doi.org/10.3390/jmse12040647