
Power Generation Enhancement through Latching Control for a Sliding Magnet-Based Wave Energy Converter
Abstract
:1. Introduction
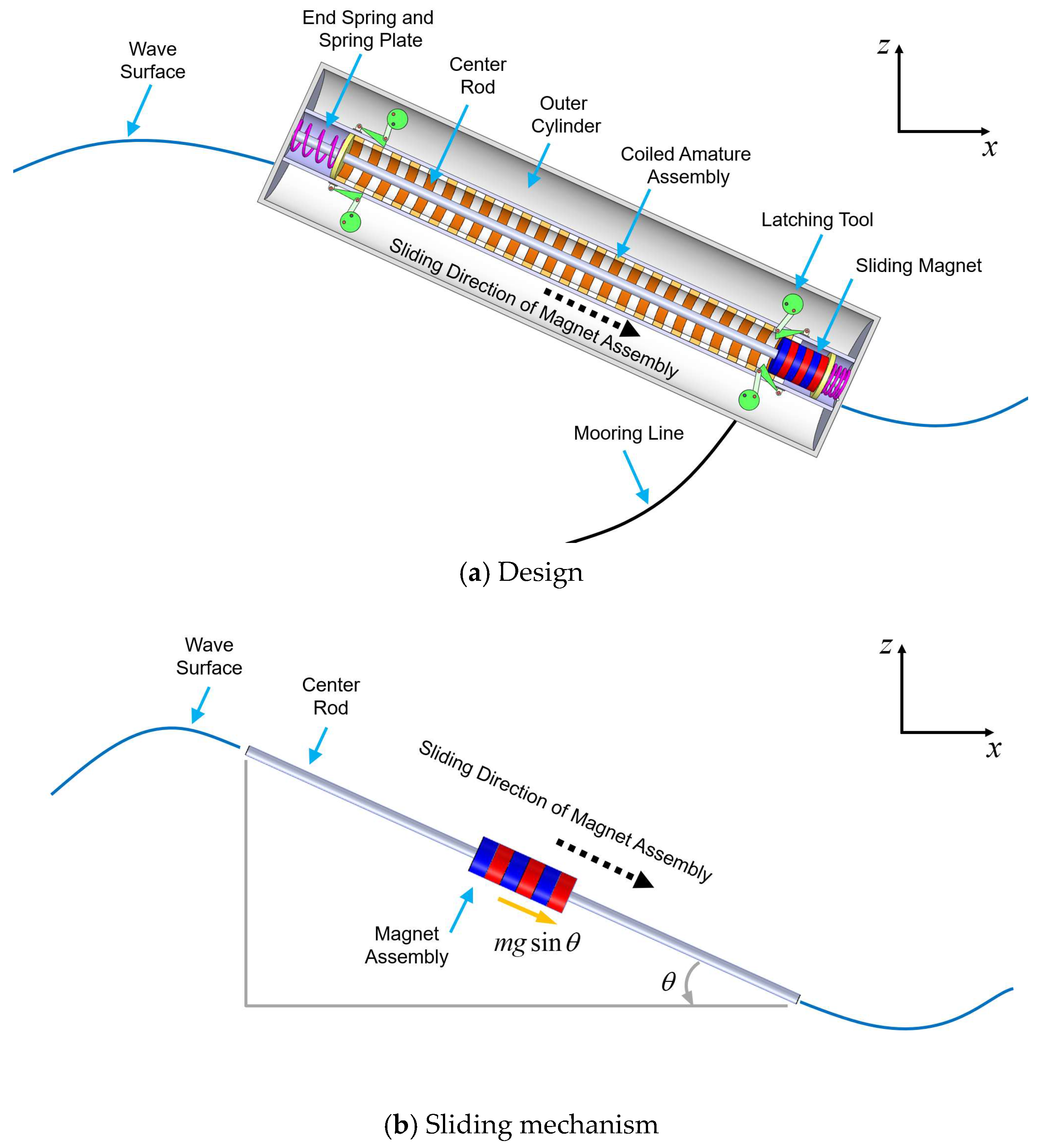
2. Power Take-Off Dynamics of SR-WEC
3. Latching Control Strategy
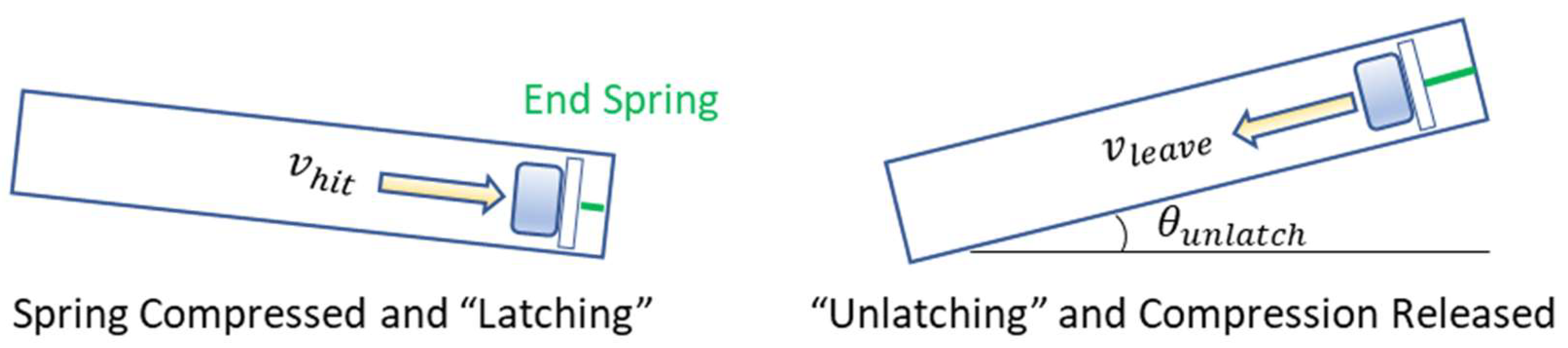
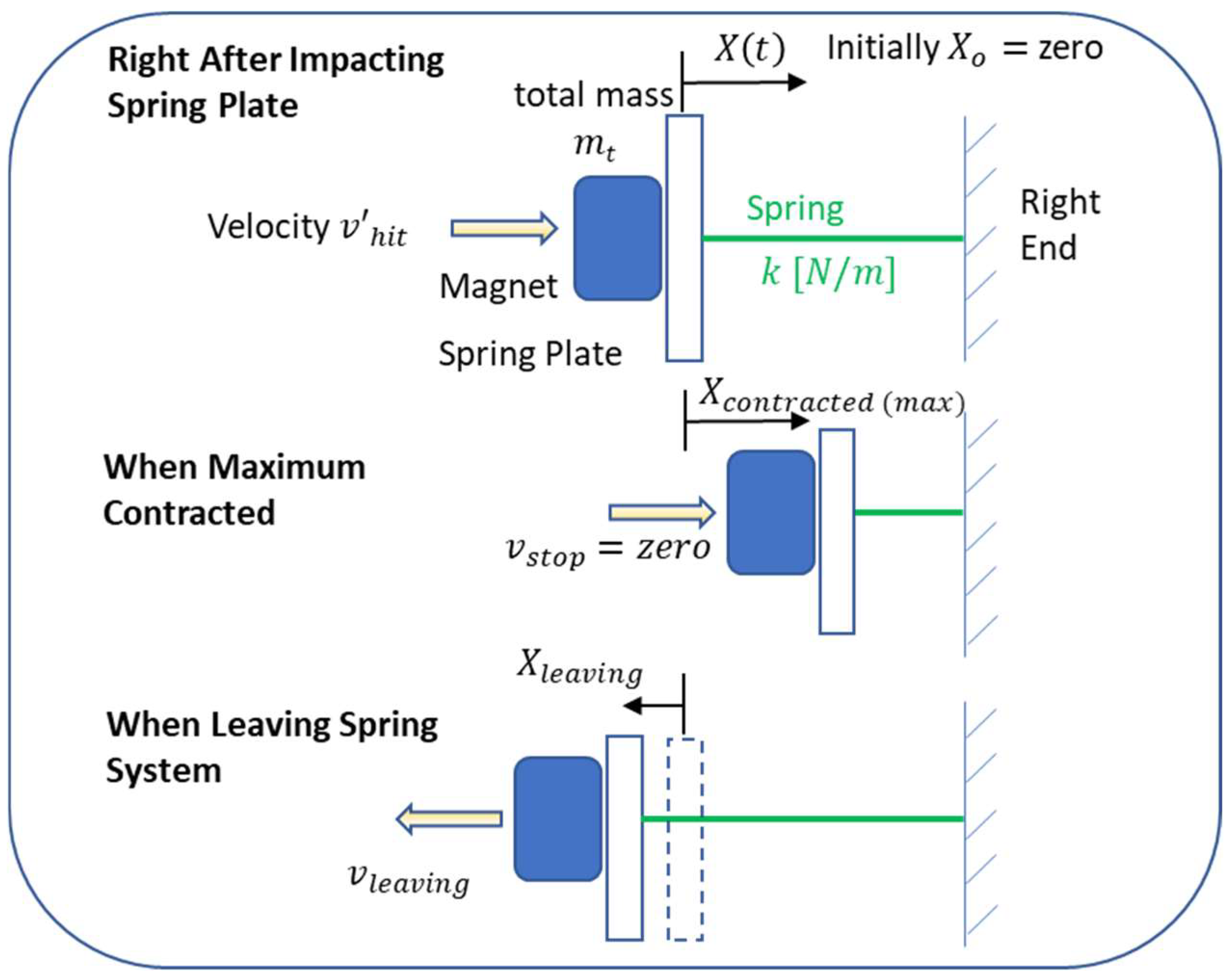
3.1. Phase Control with End Springs
3.2. Constant-Angle Unlatching vs. Variable-Angle Unlatching
4. Results and Discussions
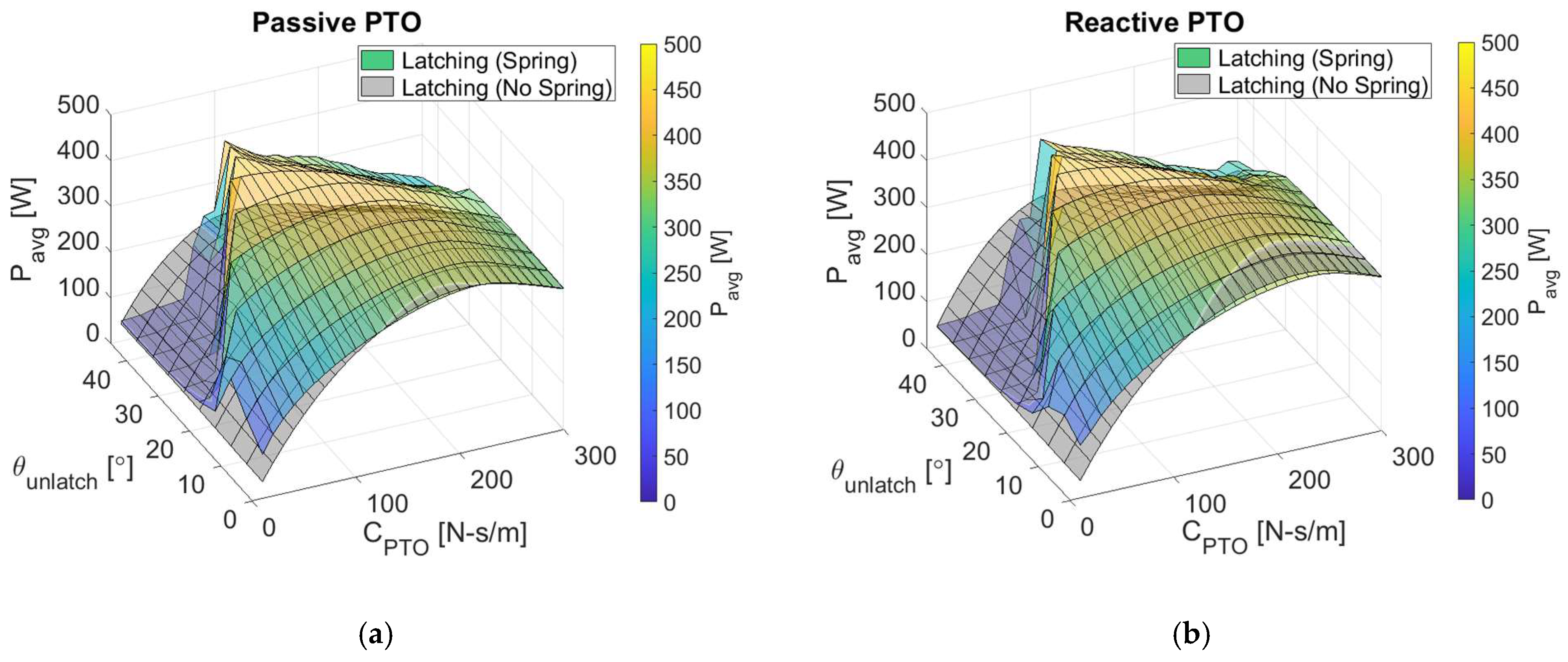
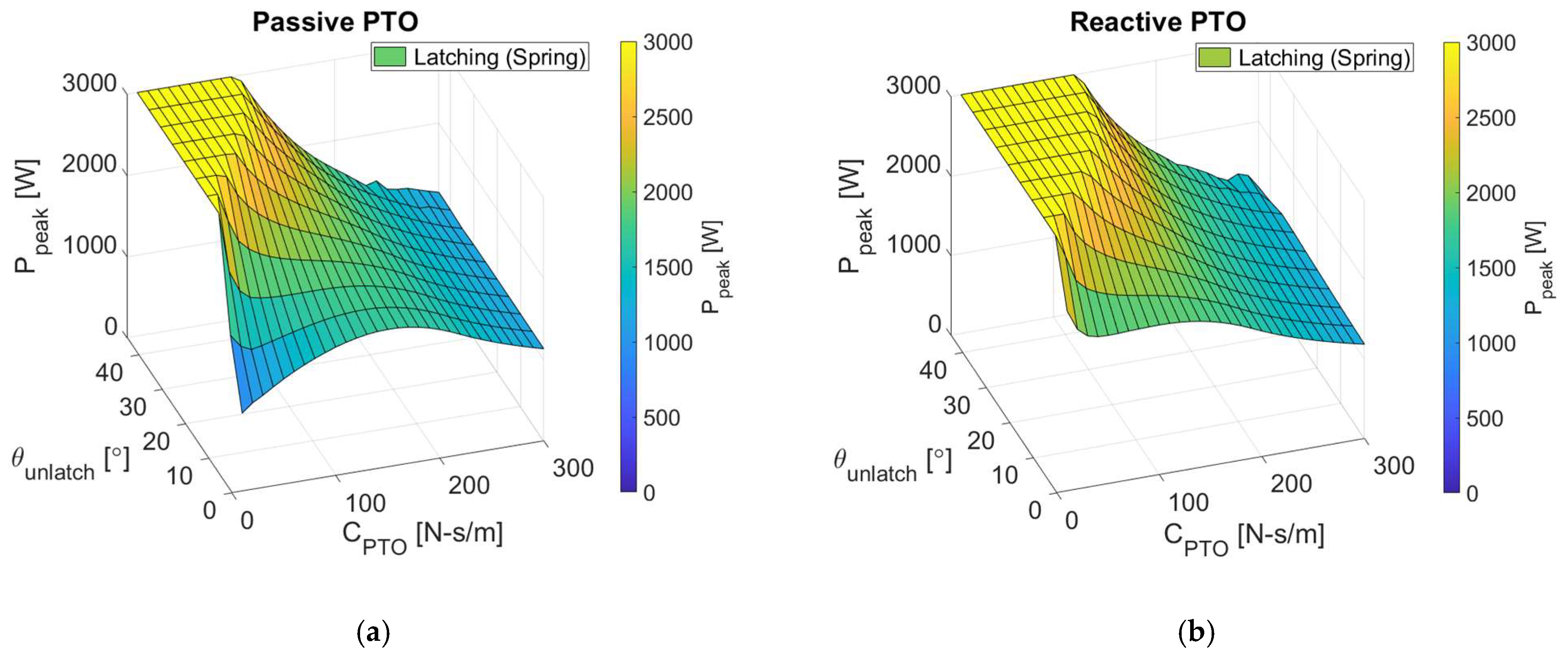
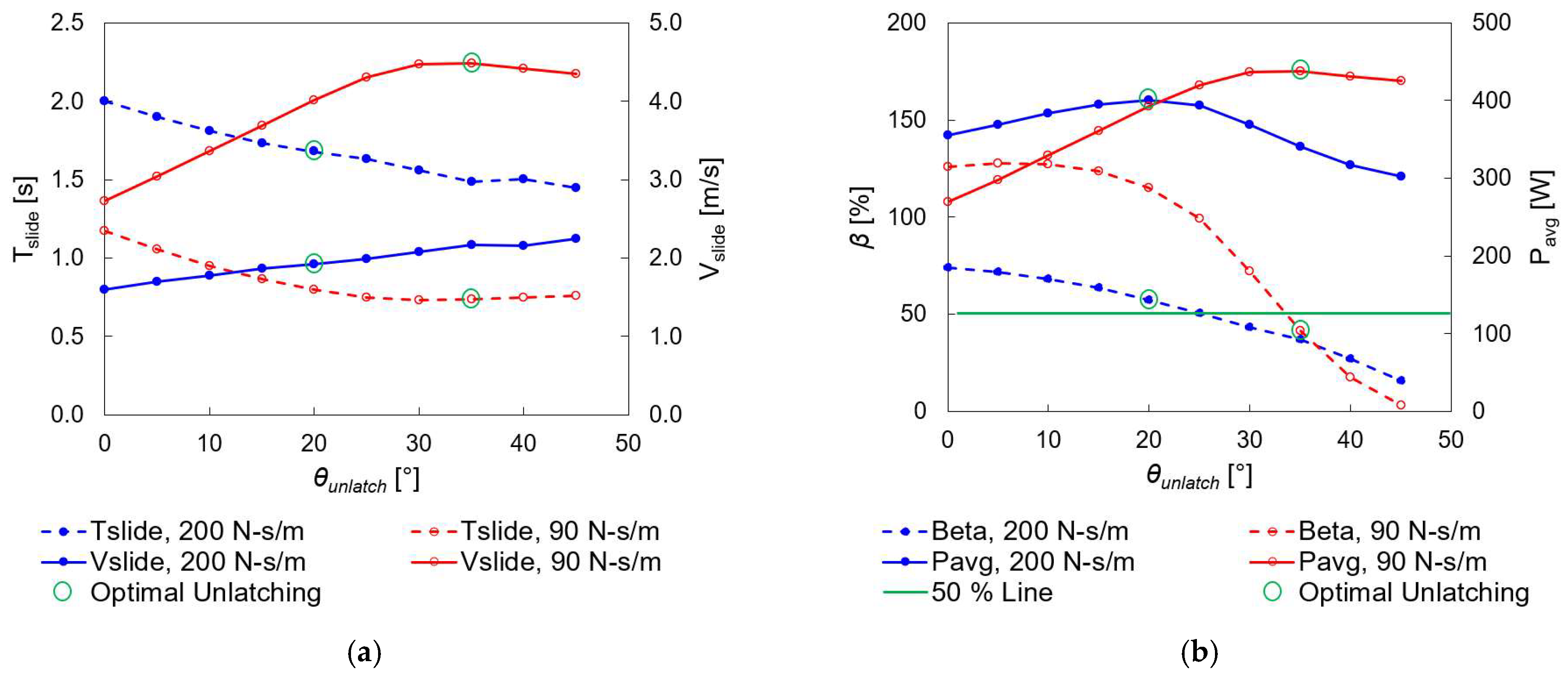
4.1. Latching Control with Constant-Angle Criteria
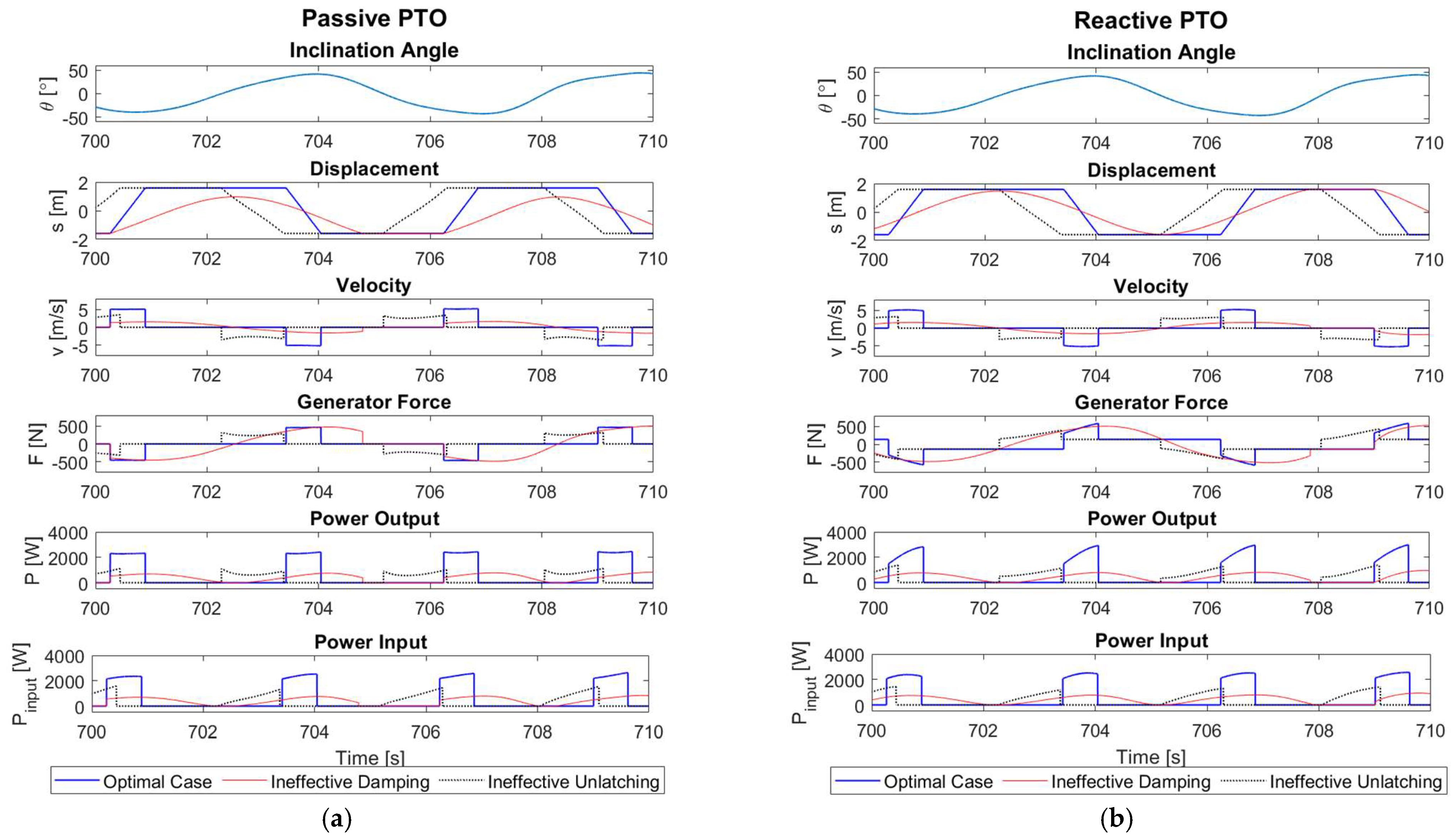
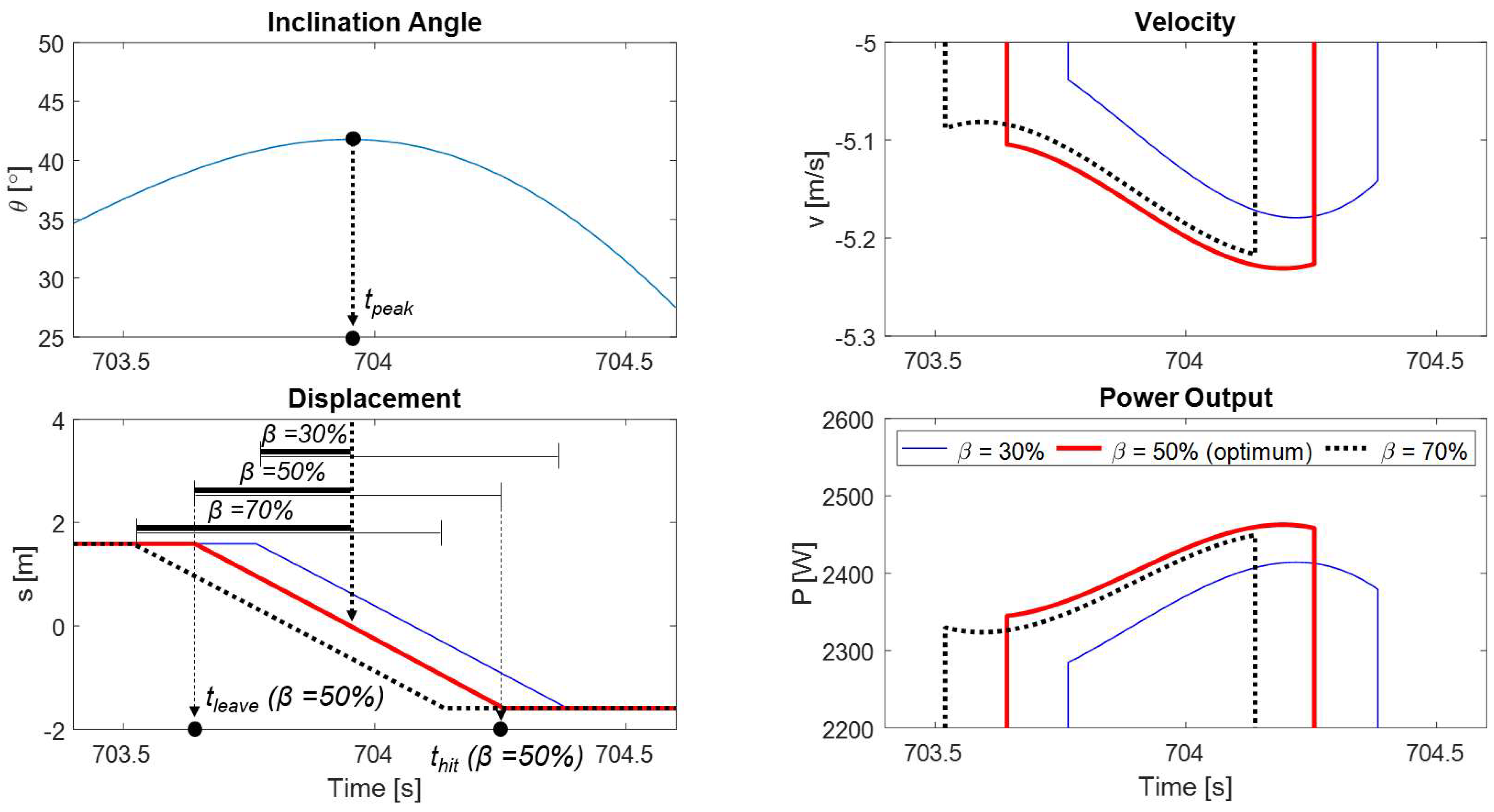
4.2. Phase Relations under Optimal Latching
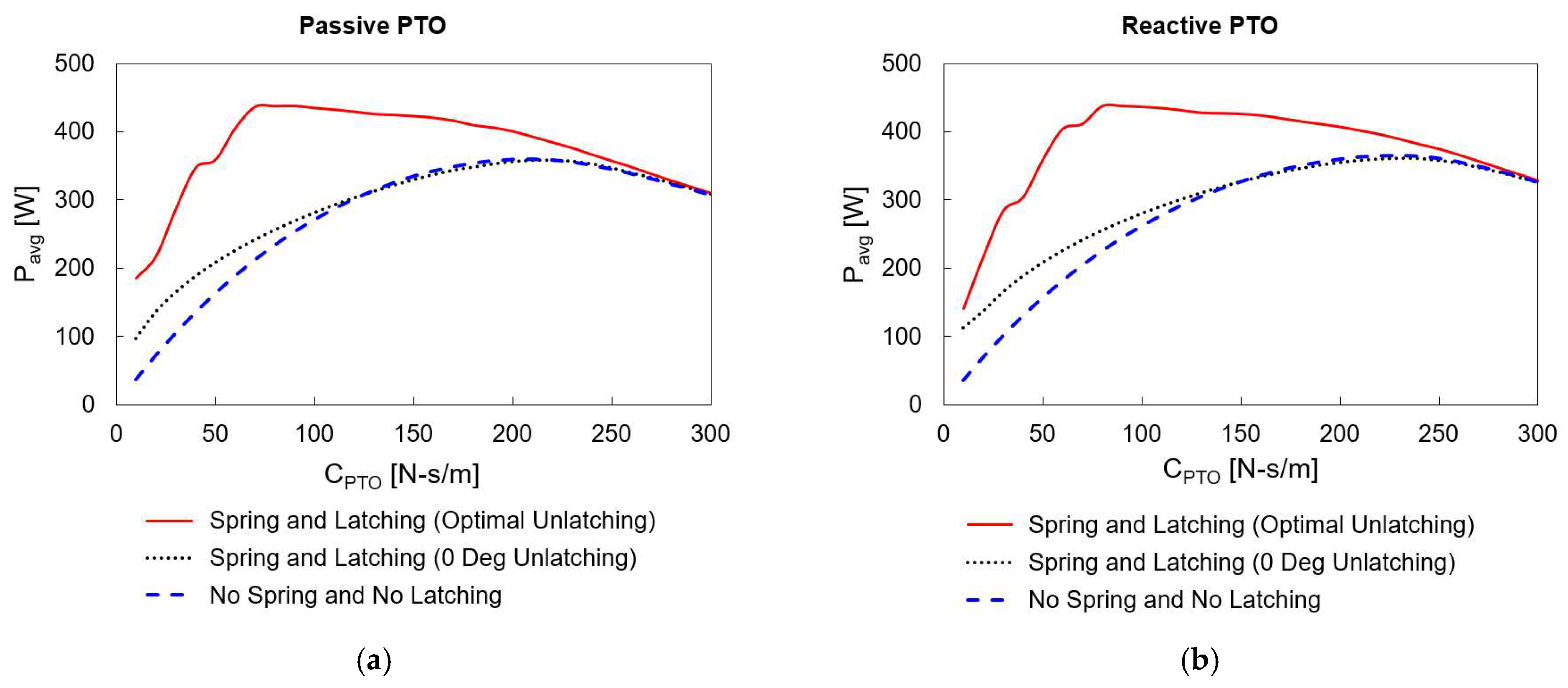
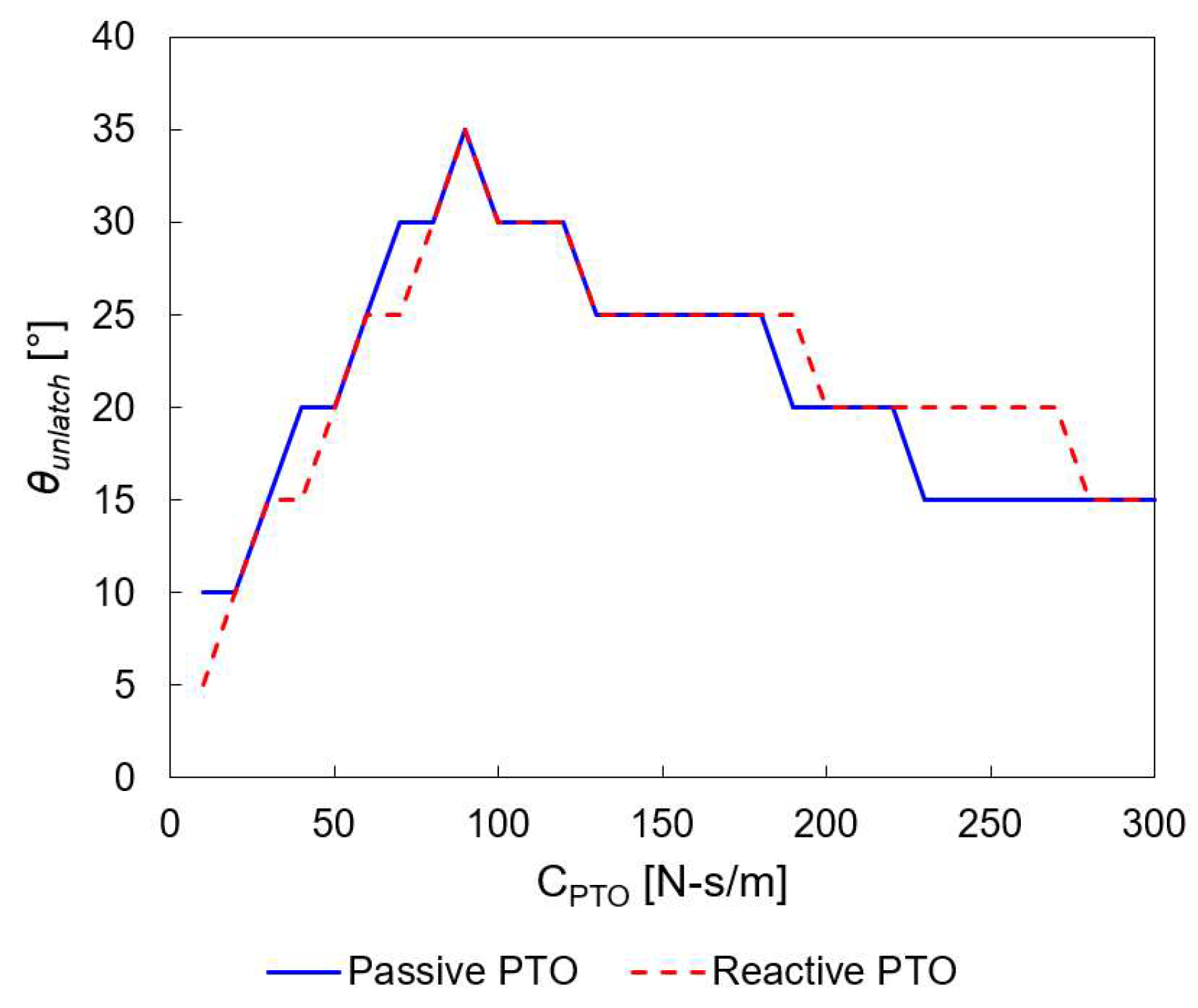
4.3. Latching Control with Variable-Angle Criteria
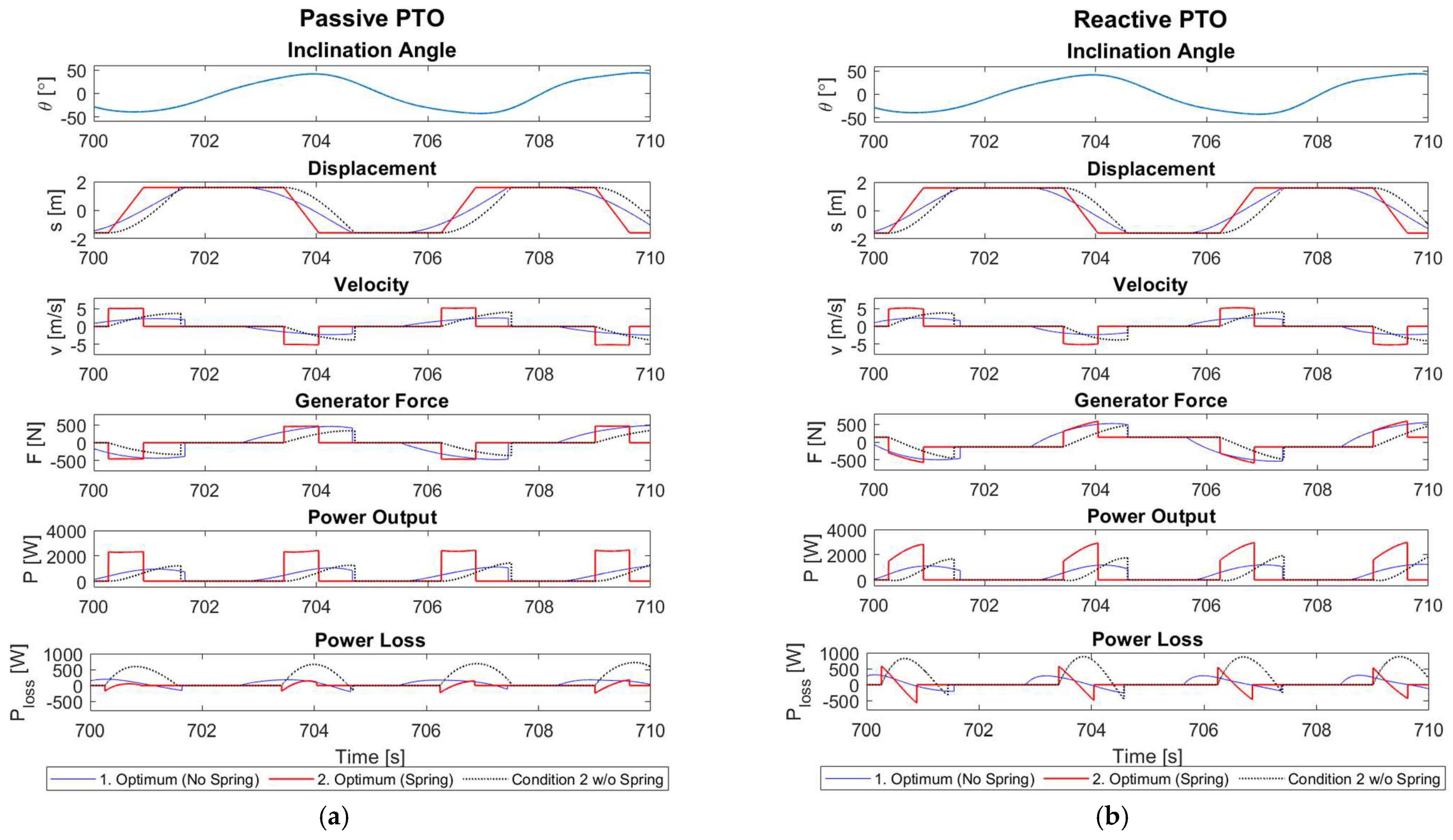
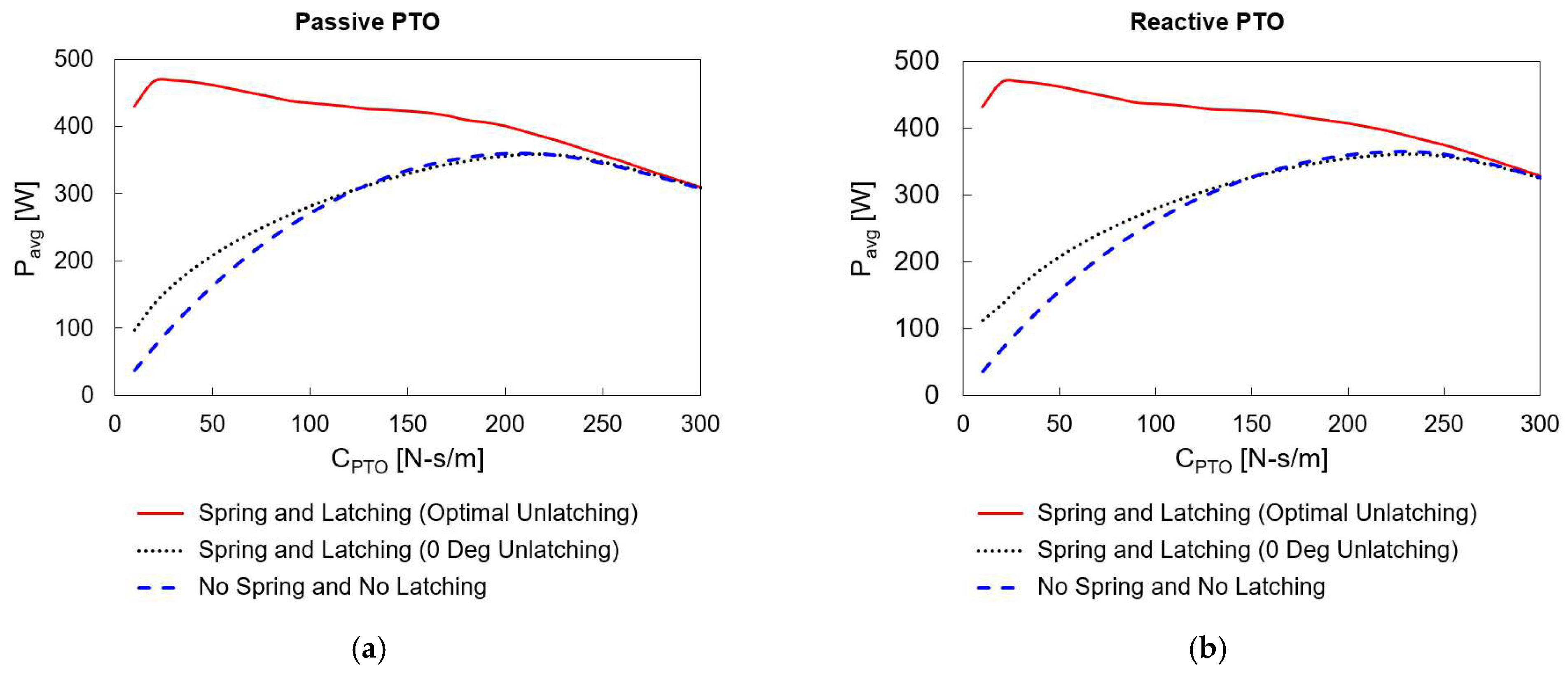
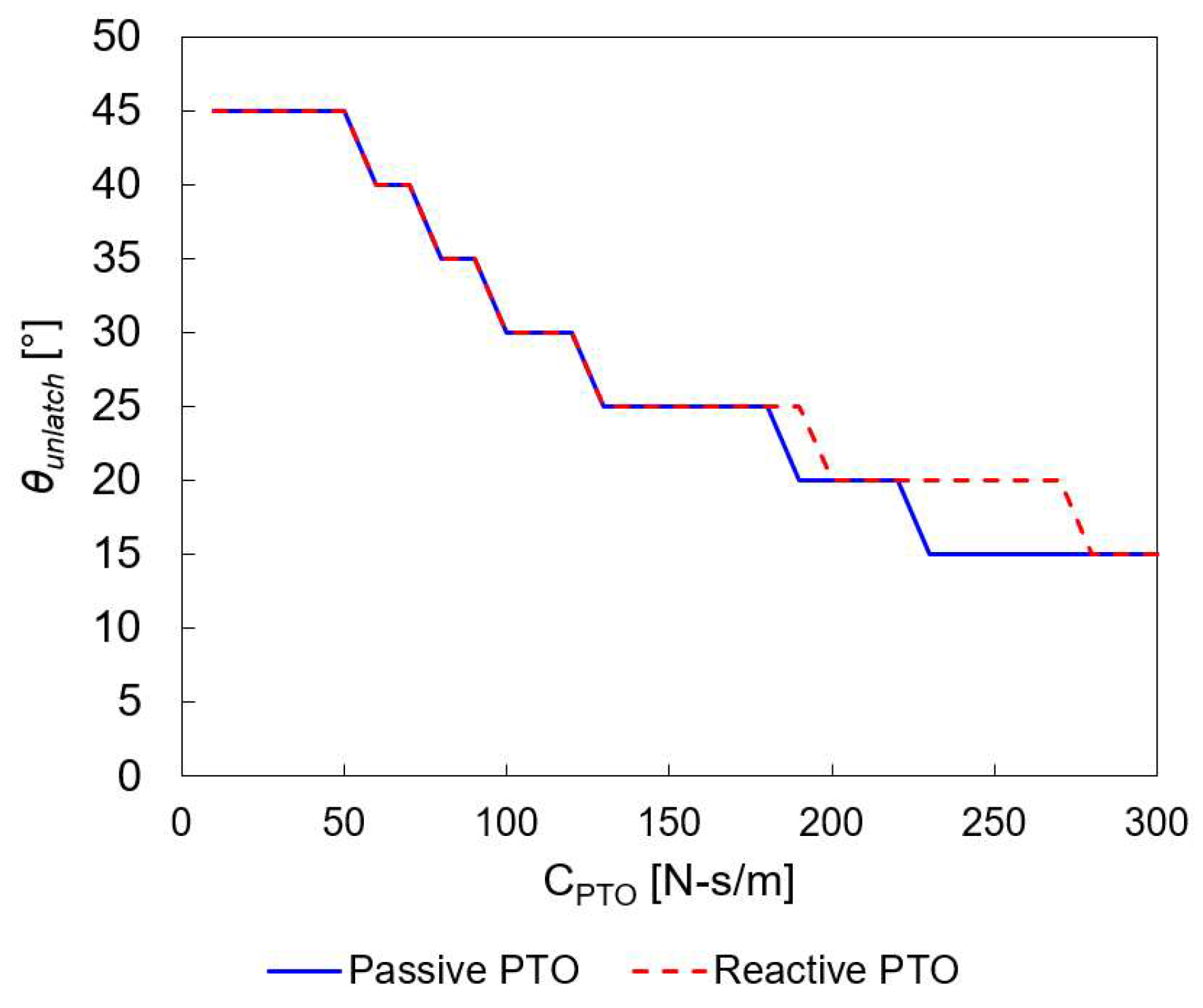
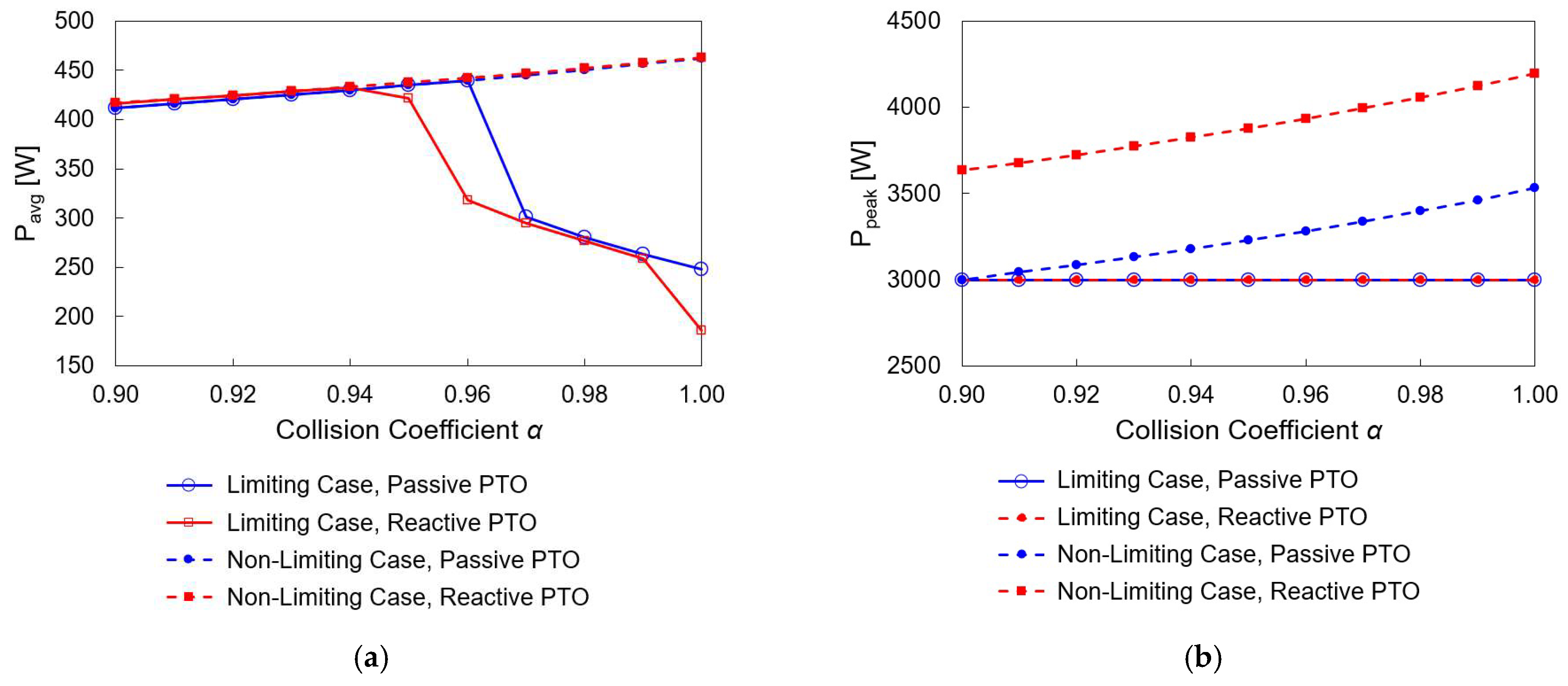
4.4. Effect of Collision Coefficient
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lehmann, M.; Karimpour, F.; Goudey, C.A.; Jacobson, P.T.; Alam, M.R. Ocean wave energy in the United States: Current status and future perspectives. Renew. Sustain. Energy Rev. 2017, 74, 1300–1313. [Google Scholar] [CrossRef]
- Kim, C.K.; Toft, J.E.; Papenfus, M.; Verutes, G.; Guerry, A.D.; Ruckelshaus, M.H.; Arkema, K.K.; Guannel, G.; Wood, S.A.; Bernhardt, J.R.; et al. Catching the right wave: Evaluating wave energy resources and potential compatibility with existing marine and coastal uses. PLoS ONE 2012, 7, e47598. [Google Scholar] [CrossRef] [PubMed]
- Jin, C.; Kang, H.Y.; Kim, M.H.; Bakti, F.P. Performance evaluation of surface riding wave energy converter with linear electric generator. Ocean Eng. 2020, 218, 108141. [Google Scholar] [CrossRef]
- Hals, J.; Falnes, J.; Moan, T. A comparison of selected strategies for adaptive control of wave energy converters. J. Offshore Mech. Arct. Eng. 2011, 133, 031101. [Google Scholar] [CrossRef]
- Maria-Arenas, A.; Garrido, A.J.; Rusu, E.; Garrido, I. Control strategies applied to wave energy converters: State of the art. Energies 2019, 12, 3115. [Google Scholar] [CrossRef]
- Mei, C.C. Power extraction from water waves. J. Ship Res. 1976, 20, 63–66. [Google Scholar] [CrossRef]
- Budal, K.; Falnes, J. Interacting point absorbers with controlled motion. In Proceedings of the Power from Sea Waves, Edinburgh, UK, 26 June 1979; pp. 381–399. [Google Scholar]
- Budal, K.; Falnes, J. Wave power conversion by point absorbers: A Norwegian project. Int. J. Ambient Energy 1982, 3, 59–67. [Google Scholar] [CrossRef]
- Greenhow, M.; Rosen, J.H.; Reed, M. Control strategies for the clam wave energy device. Appl. Ocean Res. 1984, 6, 197–206. [Google Scholar] [CrossRef]
- Korde, U.A. Latching control of deep water wave energy devices using an active reference. Ocean Eng. 2002, 29, 1343–1355. [Google Scholar] [CrossRef]
- Babarit, A.; Clément, A.H. Optimal latching control of a wave energy device in regular and irregular waves. Appl. Ocean Res. 2006, 28, 77–91. [Google Scholar] [CrossRef]
- Falcão, A.F.O. Modelling and control of oscillating-body wave energy converters with hydraulic power take-off and gas accumulator. Ocean Eng. 2007, 34, 2021–2032. [Google Scholar] [CrossRef]
- Falcão, A.F.O. Phase control through load control of oscillating-body wave energy converters with hydraulic PTO system. Ocean Eng. 2008, 35, 358–366. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Lopes, M.F.P.; Gomes, R.P.F.; Gato, L.M.C.; Falcão, A.F.O. On the annual wave energy absorption by two-body heaving WECs with latching control. Renew. Energy J. 2012, 45, 31–40. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Gato, L.M.C.; Falcão, A.F.O.; Robles, E.; Faÿ, F.X. Latching control of a floating oscillating-water-column wave energy converter. Renew. Energy J. 2016, 90, 229–241. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, A. On improving wave energy conversion, part I: Optimal and control technologies. Renew. Energy J. 2015, 75, 922–934. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, A. On improving wave energy conversion, part II: Development of latching control technologies. Renew. Energy J. 2015, 75, 935–944. [Google Scholar] [CrossRef]
- Shadman, M.; Avalos, G.O.G.; Estefen, S.F. On the power performance of a wave energy converter with a direct mechanical drive power take-off system controlled by latching. Renew. Energy J. 2021, 169, 157–177. [Google Scholar] [CrossRef]
- Wu, J.; Yao, Y.; Zhou, L.; Göteman, M. Real-time latching control strategies for the solo Duck wave energy converter in irregular waves. Appl. Energy 2018, 222, 717–728. [Google Scholar] [CrossRef]
- Thomas, S.; Eriksson, M.; Göteman, M.; Hann, M.; Isberg, J.; Engström, J. Experimental and numerical collaborative latching control of wave energy converter arrays. Energies 2018, 11, 3036. [Google Scholar] [CrossRef]
- Tedeschi, E.; Carraro, M.; Molinas, M.; Mattavelli, P. Effect of control strategies and power take-off efficiency on the power capture from sea waves. IEEE Trans. Energy Convers. 2011, 26, 1088–1098. [Google Scholar] [CrossRef]
- Sheshaprasad, S.; Naghavi, F.; Hasanpour, S.; Albader, M.; Gardner, M.C.; Kang, H.Y.; Toliyat, H.A. Optimal Electric Power Take-off Strategy for Surface Riding Wave Energy Converter. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; pp. 1–7. [Google Scholar]
- Naghavi, F.; Sheshaprasad, S.; Gardner, M.C.; Meduri, A.; Kang, H.Y.; Toliyat, H.A. Permanent Magnet Linear Generator Design for Surface Riding Wave Energy Converters. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Vancouver, BC, Canada, 10–14 October 2021; pp. 4369–4375. [Google Scholar]
- Hals, J.; Falnes, J.; Moan, T. Constrained optimal control of a heaving buoy wave-energy converter. J. Offshore Mech. Arct. Eng. 2011, 133, 011401. [Google Scholar] [CrossRef]
- Ma, Y. Machine Learning in Ocean Applications: Wave Prediction for Advanced Controls of Renewable Energy and Modeling Nonlinear Viscous Hydrodynamics. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2020. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Collision Coefficient | Spring Plate Mass [kg] |
|---|---|
| 1.00 | 0.0 |
| 0.96 | 3.1 |
| 0.94 | 4.8 |
| 0.92 | 6.5 |
| Component | Item | Value | Unit |
|---|---|---|---|
| Hull | Length | 3180 | mm |
| Diameter | 564 | mm | |
| Total WEC mass | 900 | kg | |
| Center of gravity from mean water level | −376 | mm | |
| Inner cylinder and copper plate | Outer diameter | 220 | mm |
| Inner diameter | 180 | mm | |
| Magnet assembly | Length | 120 | mm |
| Outer diameter | 180 | mm | |
| Inner diameter | 80 | mm | |
| Mass | 75 | kg | |
| Center rod | Outer diameter | 40 | mm |
| Inner diameter | 20 | mm | |
| Mass matrix of SR-WEC | , , | 900 | kg |
| 55 | kg·m2 | ||
| 1352 | kg·m2 | ||
| 1336 | kg·m2 | ||
| Natural frequency | Pitch | 1.08 | rad/s |
| Reactive PTO | Target period | 5.85 | s |
| PTO | Item | Unit | Optimal Case | Ineffective Damping | Ineffective Unlatching |
|---|---|---|---|---|---|
| Passive | N-s/m | 200 | 10 | 200 | |
| ° | 15 | 15 | 45 | ||
| W | 362.1 | 39.6 | 197.9 | ||
| W | 1553.1 | 436.6 | 1419.1 | ||
| % | 92 | 9 | 89 | ||
| Reactive | N-s/m | 200 | 10 | 200 | |
| ° | 20 | 20 | 45 | ||
| W | 386.2 | 42.7 | 246.1 | ||
| W | 1733.7 | 1333.8 | 1678.0 | ||
| % | 95 | 10 | 94 |
| PTO | Item | Unit | Optimal Case | Ineffective Damping | Ineffective Unlatching |
|---|---|---|---|---|---|
| Passive | N-s/m | 90 | 300 | 90 | |
| ° | 35 | 35 | 0 | ||
| W | 437.6 | 248.2 | 269.0 | ||
| W | 3000.0 | 1127.4 | 1536.6 | ||
| % | 100 | 100 | 100 | ||
| Reactive | N-s/m | 90 | 300 | 90 | |
| ° | 35 | 35 | 0 | ||
| W | 438.0 | 299.0 | 268.4 | ||
| W | 3000.0 | 1276.7 | 1882.9 | ||
| % | 100 | 100 | 100 |
| Unlatching Strategies | Constant Angle | Target | Target | Target | Target |
|---|---|---|---|---|---|
or | = 35° | = 0% | = 30% | = 50% | = 70% |
| [%] | 41.4 | 0.1 | 29.9 | 50.3 | 69.6 |
| [s] | 0.74 | 0.76 | 0.69 | 0.68 | 0.69 |
| [m/s] | 4.48 | 4.34 | 4.69 | 4.75 | 4.69 |
| [W] | 437.6 | 423.6 | 458.1 | 463.4 | 458.3 |
| [°] | Case 1: Passive PTO Control with Power- and Force-Limiting Case | |||
|---|---|---|---|---|
| [W] | [W] | k [-] | [%] | |
| 0 | 235.0 | 3000.0 | 12.77 | 53 |
| 3 | 247.7 | 3000.0 | 12.11 | 55 |
| 6 | 250.1 | 3000.0 | 12.00 | 58 |
| 9 | 253.8 | 3000.0 | 11.82 | 62 |
| [°] | Case 2: Reactive PTO Control with Power- and Force-Limiting Case | |||
|---|---|---|---|---|
| [W] | [W] | k [-] | [%] | |
| 0 | 231.4 | 3000.0 | 12.96 | 52 |
| 3 | 185.6 | 3000.0 | 16.17 | 41 |
| 6 | 246.2 | 3000.0 | 12.19 | 57 |
| 9 | 248.4 | 3000.0 | 12.08 | 61 |
| [°] | Case 3: Passive PTO Control with Power- and Force-Non-Limiting Case | |||
|---|---|---|---|---|
| [W] | [W] | k [-] | [%] | |
| 0 | 423.6 | 3231.5 | 7.63 | 100 |
| 3 | 462.1 | 3533.6 | 7.65 | 100 |
| 6 | 454.1 | 3479.9 | 7.66 | 100 |
| 9 | 440.4 | 3375.8 | 7.67 | 100 |
| [°] | Case 4: Reactive PTO Control with Power- and Force-Non-Limiting Case | |||
|---|---|---|---|---|
| [W] | [W] | k [-] | [%] | |
| 0 | 424.2 | 3834.0 | 9.04 | 100 |
| 3 | 462.7 | 4195.4 | 9.07 | 100 |
| 6 | 454.6 | 4135.3 | 9.10 | 100 |
| 9 | 440.9 | 4018.7 | 9.11 | 100 |
| Case | ||||||
|---|---|---|---|---|---|---|
| Unlatching Criteria | Constant | Variable | Constant | Variable | Constant | Variable |
| [W] | 415.7 | 439.4 | 406.1 | 429.8 | 409.8 | 432.3 |
| [W] | 2868.8 | 3000.0 | 2800.9 | 3000.0 | 3000.0 | 3000.0 |
| k [-] | 6.90 | 6.83 | 6.90 | 6.98 | 7.32 | 6.94 |
| Enhancement [%] | 64.0 | 73.3 | 60.2 | 69.5 | 67.6 | 76.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.; Kang, H.; Kim, M. Power Generation Enhancement through Latching Control for a Sliding Magnet-Based Wave Energy Converter. J. Mar. Sci. Eng. 2024, 12, 656. https://doi.org/10.3390/jmse12040656
Lee Y, Kang H, Kim M. Power Generation Enhancement through Latching Control for a Sliding Magnet-Based Wave Energy Converter. Journal of Marine Science and Engineering. 2024; 12(4):656. https://doi.org/10.3390/jmse12040656
Chicago/Turabian StyleLee, Yongseok, HeonYong Kang, and MooHyun Kim. 2024. "Power Generation Enhancement through Latching Control for a Sliding Magnet-Based Wave Energy Converter" Journal of Marine Science and Engineering 12, no. 4: 656. https://doi.org/10.3390/jmse12040656