1. Introduction
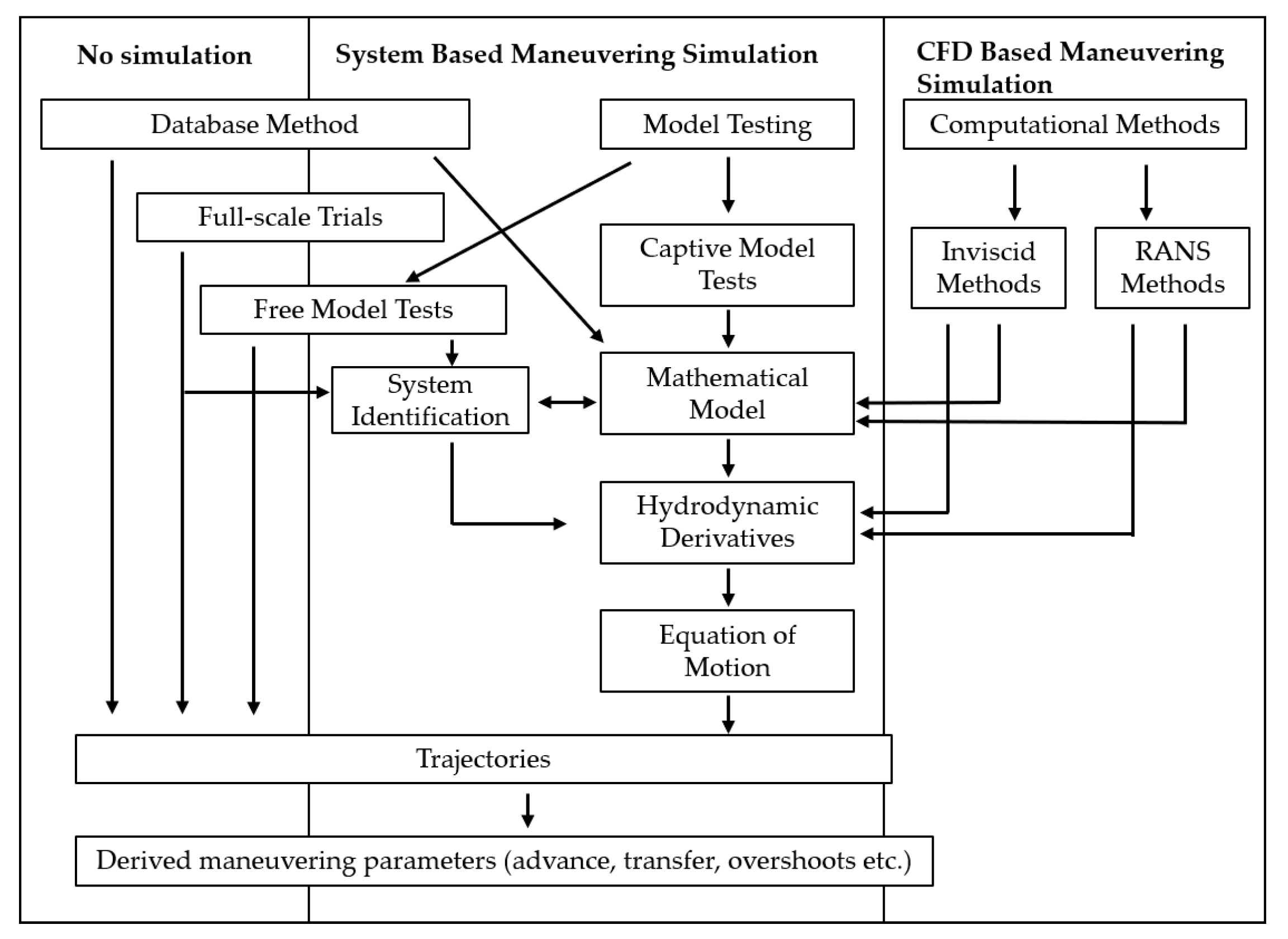
Ship maneuverability, a pivotal aspect of maritime performance research, is essential for the assurance of navigational safety. Methods for predicting ship maneuvering performance are categorized into three principal types [
1]: no simulation, system-based simulation and computational fluid dynamics (CFD)-based simulation. No simulation methods encompass database approaches, full-scale trials and free-running model tests. The former primarily utilizes regression analysis for swift evaluation, while the latter employs targeted experiments to directly ascertain maneuverability performance. The system-based simulation approach integrates hydrodynamic coefficients with equations of motion for ship maneuverability, facilitating the calculation of the ship’s trajectory and associated motion parameters to predict its maneuverability.
Broadly, the assessment of ship maneuverability favors methods that are straightforward, efficient and cost-effective. These include approaches grounded in regression formulas based on characteristic parameters, database methods, free-running model test and numerical analyses employing mathematical models [
2]. Mathematical models for ship maneuvering are principally divided into response models and hydrodynamic models. Response models establish a direct link between the ship’s state of motion and rudder actions via navigational tests, enabling the analysis and resolution of maneuvering characteristics. Regarding hydrodynamic models, two primary mathematical models are predominantly utilized. (See
Figure 1).
The first model is the integrated structure model delineated by Abkowitz [
3], which examines the hull, propeller and rudder collectively along with the cumulative force exerted. The second model, the Ship Maneuvering Mathematical Model Group (MMG model [
4]), introduced by the Japanese Towing Tank Committee (JTTC), conducts separate hydrodynamic calculations for the hull, propeller and rudder, taking into account their interferences. Meng et al. [
5] developed a response mathematical model for the vessel YUKUN, integrating Support Vector Regression with a modified grey wolf optimizer to obtain reference values for the model’s parameters. Fossen [
6] performed the theory and practice research on nonlinear ship control in response to the mathematical model. Svilicic et al. [
7] assessed collision risks for the KVLCC2 ship through accurate modelling of ship maneuverability using non-linear FEM (NFEM). The Abkowitz maneuvering model is implemented in the LS-Dyna software code and is therefore coupled with FEM calculations. Shin et al. [
8] investigated the maneuverability of a KCS equipped with energy-saving devices utilizing the MMG model. Reichel [
9] introduced a novel characterization of forces on azimuth thrusters within the motion mathematical model, employing MMG methodology and experimentally validating its accuracy.
Both methods necessitate precise hydrodynamic derivative calculations to develop an accurate model of ship maneuverability. The extensive application of CFD techniques facilitates more precise outcomes in ship hydrodynamics analysis, design and maneuverability forecasting. Given this backdrop, numerous researchers have advanced static and dynamic simulations to study ship maneuvering movements. Sun et al. [
10] utilized the STAR-CCM+ software to model the Planar Motion Mechanism (PMM) of the hull through the overlapping grid technique, deriving hydrodynamic derivatives subsequently integrated into the MMG model for twin waterjet propulsion vessels. Ahmad et al. [
11] performed Oblique Towing Tests (OTT) and dynamic Planar Motion Mechanism (PMM) analyses on the vessel DTMB 5512 using CFD simulations to determine the hydrodynamic derivatives.
In ship maneuverability modeling, the four-Degree-of-Freedom (4-DOF) MMG model is broadly embraced for its clear-cut derivatives and efficient computation, particularly emphasizing the impact of ship roll. R. Rajita et al. [
12] addressed the calculation of linear, nonlinear and roll-coupled hydrodynamic derivatives for a container ship through CFD-based numerical simulations of static and dynamic tests across various roll angles. Li et al. [
13] executed Oblique Towing Tests (OTT) and dynamic Circular Motion Tests (CMT) to collect essential data for MMG model identification, and they simulated the free-running maneuverability test using a body force propeller approach that obviates the need for detailed flow field construction around the propeller. Guo et al. [
14] investigated the 4-DOF ship maneuvering motion in calm water for the ONR tumblehome model by a system-based method. The result indicates the validity of the CFD-based modelling method for the hull−propeller−rudder interaction of twin-screw ships. Okuda et al. [
15] applied the 4-DOF MMG method as a practical simulation method that includes the roll-coupling effect to predict the maneuvering of a KCS at fast speeds. Dash et al. [
16] developed a 4-DOF simulation method for the maneuvering motion of a ship with a twin propeller and twin rudder system. The hydrodynamic derivatives and parameters were determined by the PMM tests, and roll-induced bifurcation in maneuvering was discussed by the simulations.
Likewise, the discretized propeller approach can simulate free-running maneuverability tests. Shen et al. [
17] implement the dynamic overset grid technique into naoe-FOAM-SJTU solver to simulate standard 10/10 zig-zag maneuver and modified 15/1 zig-zag maneuver of KCS, which showed good agreement with the experiment data. Wang et al. [
18] studied the free running test of the ONR Tumblehome ship model under course keeping control with twin actual rotating propellers and moving rudders, and a new course keeping control module was developed using a feedback controller based on the CFD solver. Carrica et al. [
19] conducted a study on a KCS container ship performing a zigzag maneuver in shallow water experimentally and numerically using direct discretization of a moving rudder and propeller. The zigzag maneuver at the nominal rudder rate uses grids of up to 71.3 million points. Sanada et al. [
20] performed research on the hull–propeller–rudder interaction at the Korea Research Institute of Ships using a combined experimental fluid dynamic and CFD method, with an innovative approach being employed for the analysis of steady state circular motions. Nonetheless, both techniques demand significant computational resources and time costs to precisely model ship maneuvering movements, especially for a full rotary ship. Consequently, integrating mathematical modeling with CFD simulations of captive model tests has proven to enhance forecasting speed while maintaining a balance between rapidity and accuracy [
21].
Full rotary propellers, as opposed to conventional rudder and propeller setups, possess enhanced maneuvering capabilities, adeptly dealing with intricate scenarios like stationary rotation and sideways motion [
22]. It is shown that a ship’s stability can be jeopardized in terms of excessive heeling in calm water or parametric rolling in extreme waves due to low GM and damping characteristics. The effect of GM or loading conditions due to the accommodation of full rotary propellers have been more apparent between runs in design draught and scantling draught conditions [
23]. Currently, limited calculations and simulations fully account for the impact of dual full rotary propellers on ship maneuverability, with reliance primarily being on free-running tests or full-scale trials. Neatby et al. [
24] performed comprehensive full-scale trials, encompassing turning circles, effective turning tests and crash stops, on a vessel equipped with dual Z-drive thrusters. Reichel [
9] introduced a 3-DOF mathematical model grounded in MMG methodology, conducting both numerical simulations and experimental validations on a pod-driven coastal tanker. This approach verified the model’s capability to discern performance trends, even in vessels with unstable trajectories. Piaggio et al. [
25] showcased the findings of a comparative analysis between spade and flap rudder configurations versus pod-driven systems for a select fleet, demonstrating that appropriately designed pod units do not compromise yaw control capabilities.
Conducting full rotary propulsion ship free-running tests via direct CFD simulations necessitates a finer grid mesh, thereby increasing the demand for computational resources and extending the time required for analysis. Meanwhile, the current research on the maneuverability of dual full-rotary propulsion ships lacks consideration of rolling conditions, and the high DOF motion of the propeller makes direct CFD simulation more difficult. Viewed comprehensively, research on fast motion prediction of dual full-rotary propulsion ships is still relatively scant, and related theoretical studies and practical problems still need to be examined.
This paper introduces a fast-time prediction technique for predicting ship maneuverability. Utilizing CFD methods, this study simulates the captive model test of the “Zhifei” [
26] ship to derive its hydrodynamic derivatives. Furthermore, it presents a 4-DOF MMG mathematical model for dual full rotary propulsion ships. Numerical simulations on full-scale tests were performed on the “Zhifei” ship for turning and zigzag maneuvers in calm waters, with the results being compared against experimental full-scale trial data to confirm the viability of the proposed maneuvering model for dual full-rotary propulsion ships. This approach offers a reliable solution for the precise prediction of maneuverability during the ship’s design stage.
4. Maneuverability Simulation and Verification
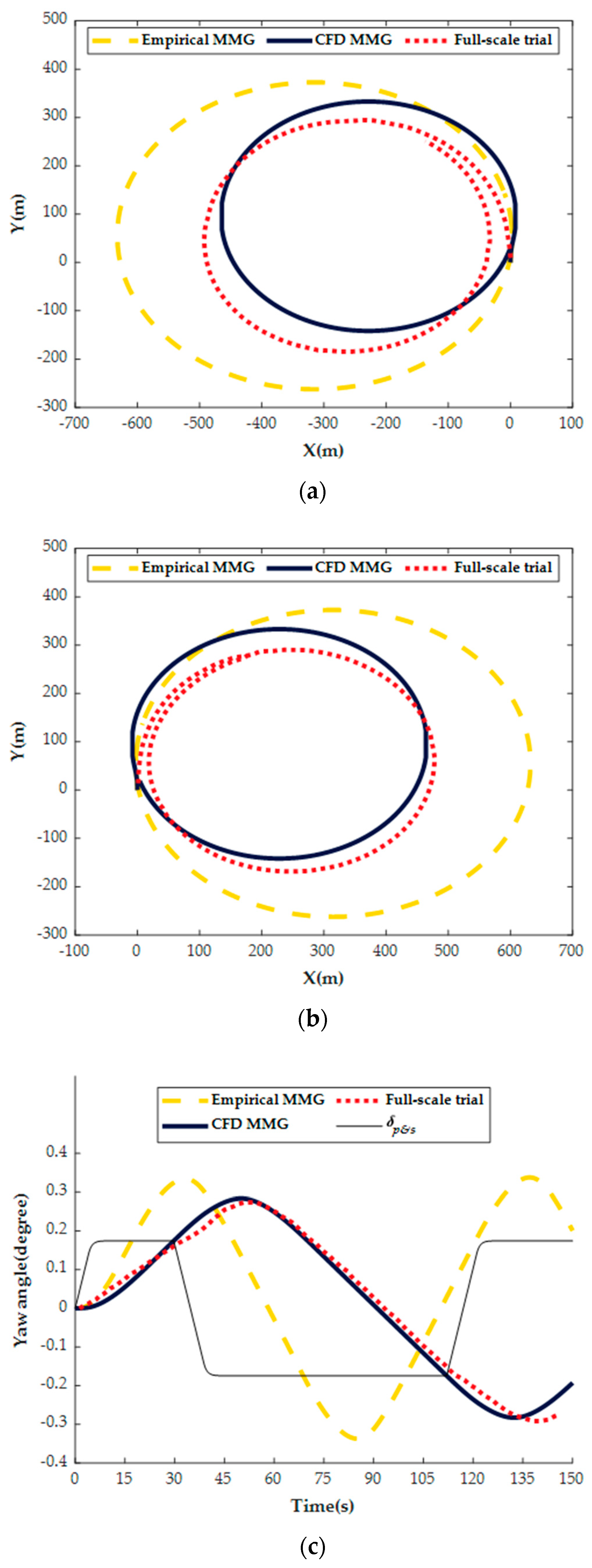
Utilizing the four-degree-of-freedom MMG equations for a fully rotary propelled ship, this study calculates hydrodynamic derivatives through empirical formulae and CFD simulations. Subsequently, time-domain differential equations are solved to facilitate computer simulations of the ship maneuvering dynamics, enabling the determination of its motion trajectory and maneuvering characteristics. The study conducts numerical simulations of the ship’s 10° turning motion and ±10° zigzag motion under the assumption that both left and right propellers maintain constant rotational speeds and receive identical motion commands throughout the simulation process.
Concurrently, a full-scale trial is conducted in calm waters using the same commands, allowing for a direct comparison between the simulated tests and actual ship performance, as depicted in
Figure 18. Additionally, a comparison of characteristic parameters for the turning and zigzag motions is presented in
Table 6 and
Table 7.
The graphical data illustrates that the ship’s maneuvering parameters simulated during the CFD MMG tests align with the parameters observed in the full-scale trial. Furthermore, the ship’s turning capabilities and directional stability meet the IMO’s standards for maneuverability. The simulation accurately reproduced the tactical diameters observed during the turning motion to within a 5% error of the real ship test data. Nevertheless, the overall motion trajectory deviates slightly from the full-scale trial, which is caused by the interference of wind and wave factors present in the full-scale test, leading to a lateral shift in the ship’s trajectory. While the current simulation only considers calm water conditions, as a result, the simulation errors for both advance and transfer are significantly larger and add to the uncertainty of rolling angle simulation; however, the transfer error is reduced when sailing upwind in the right turning at 10°. The error for the overall parameter characteristics is kept within 15%, which is an acceptable threshold, although there are also errors arising from scale effects inherent in the simulation. The CFD MMG method exhibits higher accuracy compared to the empirical MMG model.
During the zigzag maneuvering motion test, the simulated yaw direction and test curve largely align, exhibiting minimal error in the first overshoot angle. However, as calculation iterations progress, the cumulative time error incrementally escalates. Nevertheless, the overall deviation of the zigzag maneuvering motion parameters derived from the simulation remains below 10%, closely mirroring the full-scale trial data.
The methodology employed in this study markedly diminishes simulation errors across all maneuvering motion characteristic parameters compared to empirical MMG method. It can calculate more accurate hydrodynamic parameters in advance and obtain the ship’s motion response through a rapid mathematical model calculation, and so its computational cost is significantly reduced compared with the CFD direct simulation method and experiments. This enhances the precision of maneuverability predictions at an acceptable computational expense, rendering it highly conducive to validating and optimizing ship maneuverability during the design phase.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}