
Research on Modeling Method of Autonomous Underwater Vehicle Based on a Physics-Informed Neural Network

Abstract
:1. Introduction
2. Methodology
2.1. Coordinate Systems and Equations of Space Motion
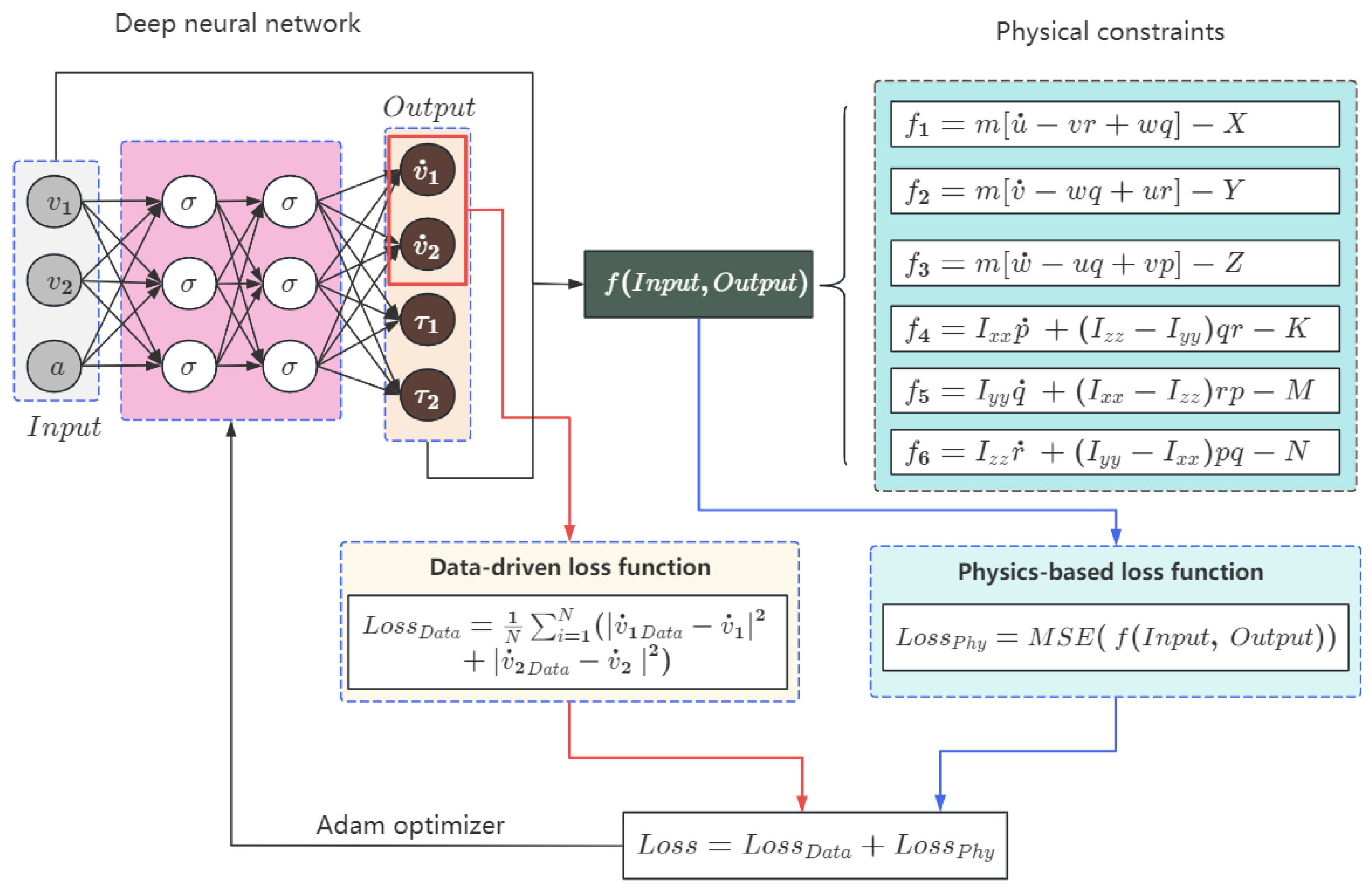
2.2. AUV Modeling Method Based on PINN
| Algorithm 1: Multi-step iterative training |
| The training procedure of the model PINN-Net |
| Input: State values and action values |
| Result: A set of (sub)optimal network parameters |
| Step 1: randomly initialize |
| Step 2: while not done do |
| Step 3: Sample batch of dataset |
| Step 4: for all do |
| Step 5: Sample N consecutive points from |
| Step 6: for all do |
| Step 7: Calculate the in sequential iterations using in Equation (20) |
| Step 8: Calculate the total gradient using |
| Step 9: Update with gradient descent |
| Step 10: end for |
| Step 11: end for |
| Step 12: end while |
2.3. Design of Model Predictive Control Based on PINN
3. Numerical Experiment
3.1. Simulation Data Acquisition Methods
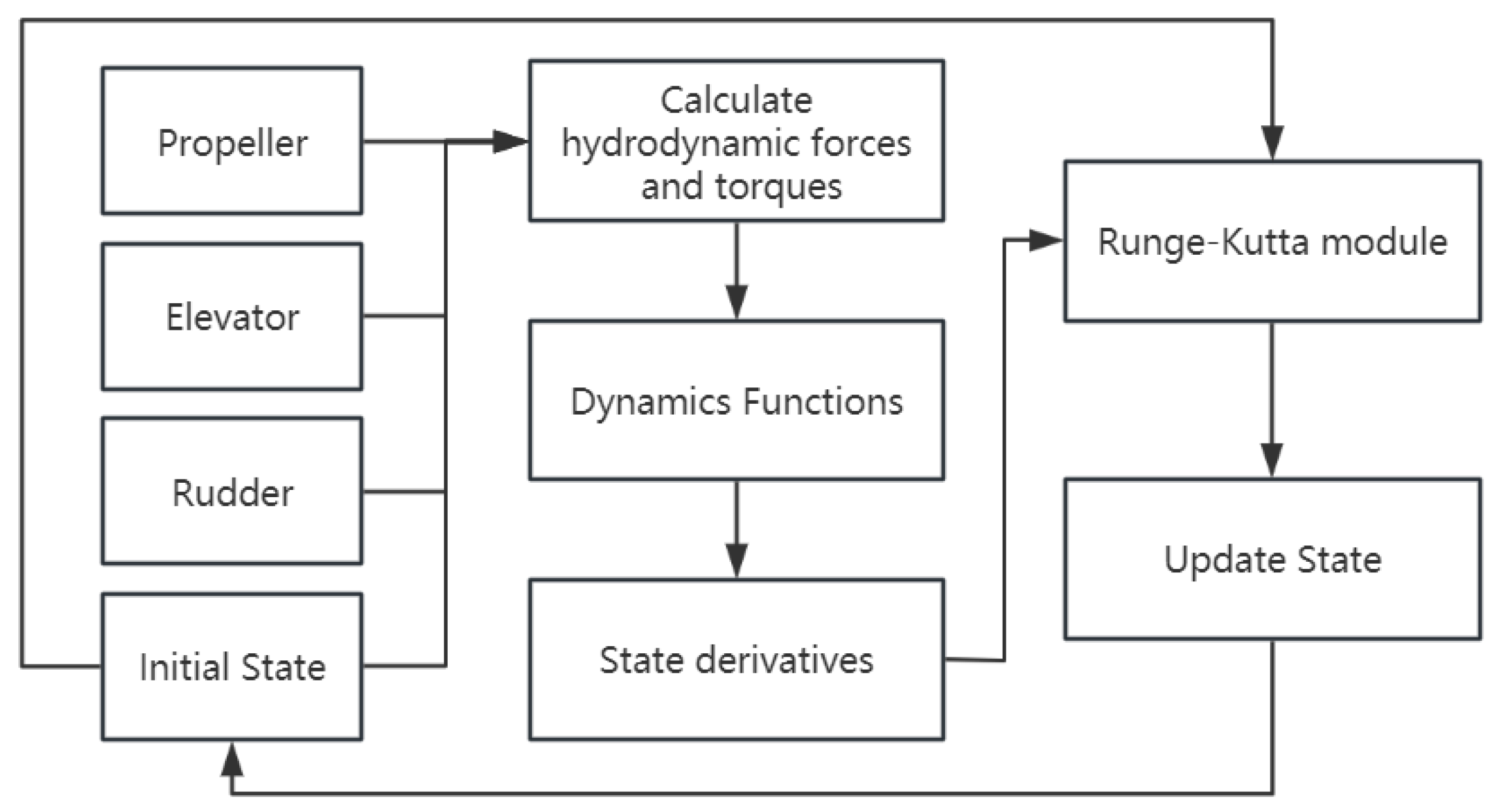
3.1.1. Simulation Platform
3.1.2. Simulation Dataset
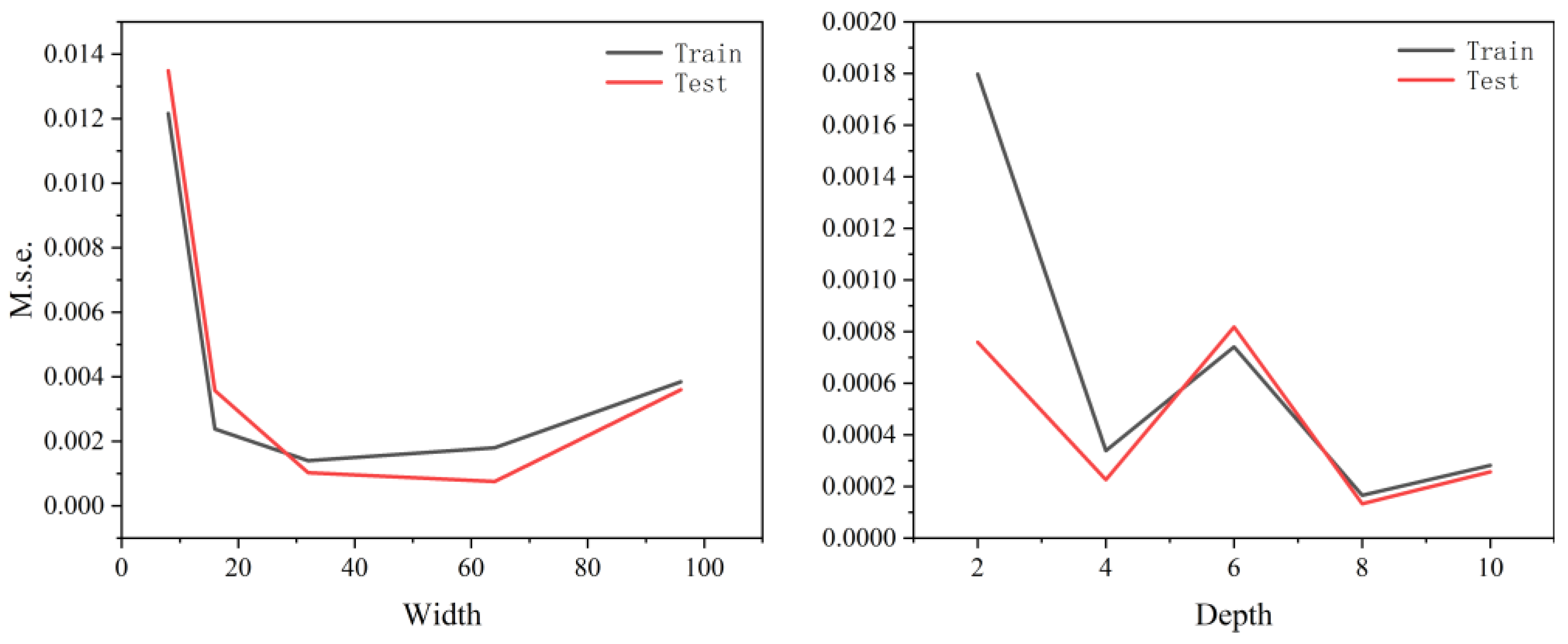
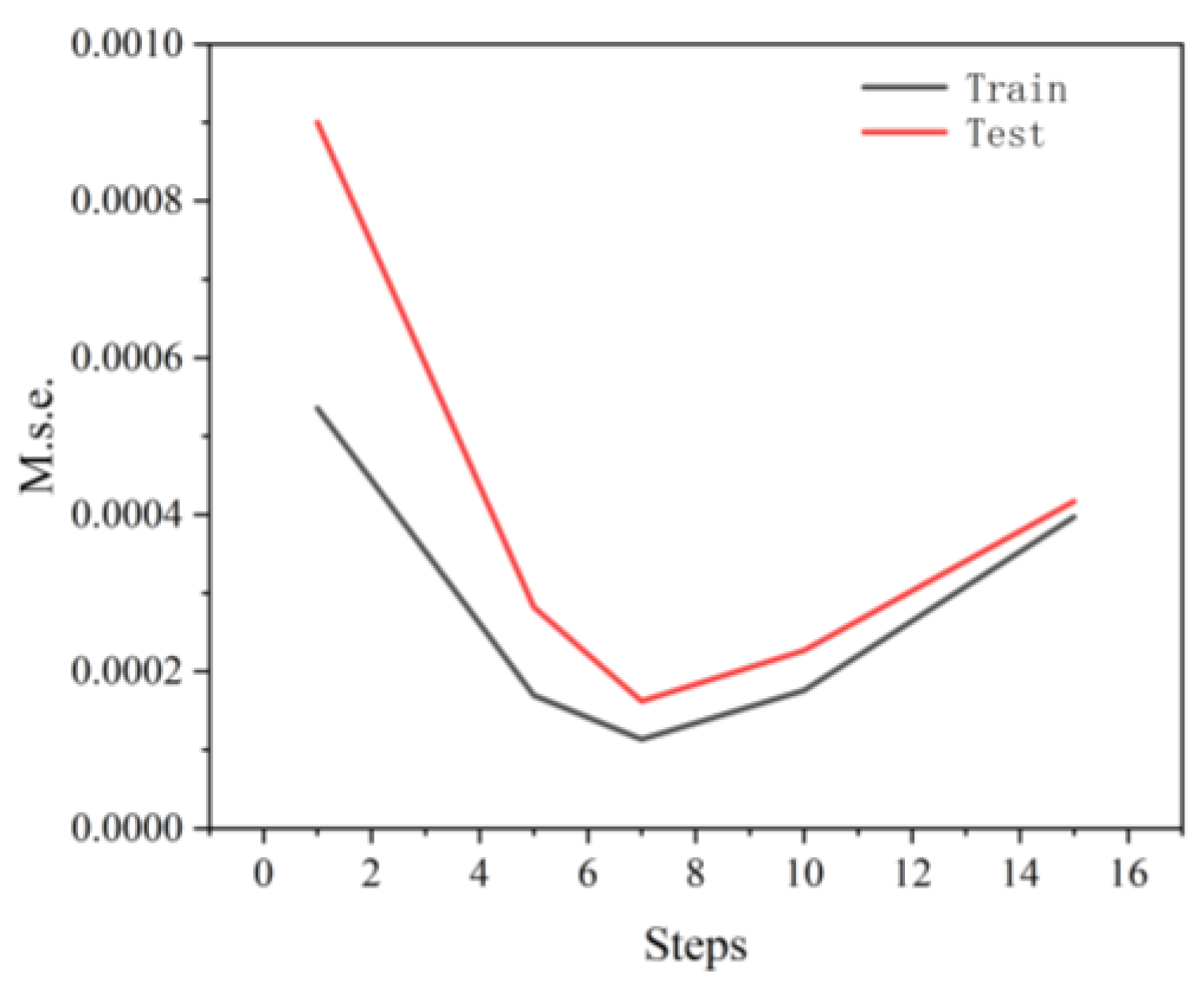
3.2. Convergence Experiments
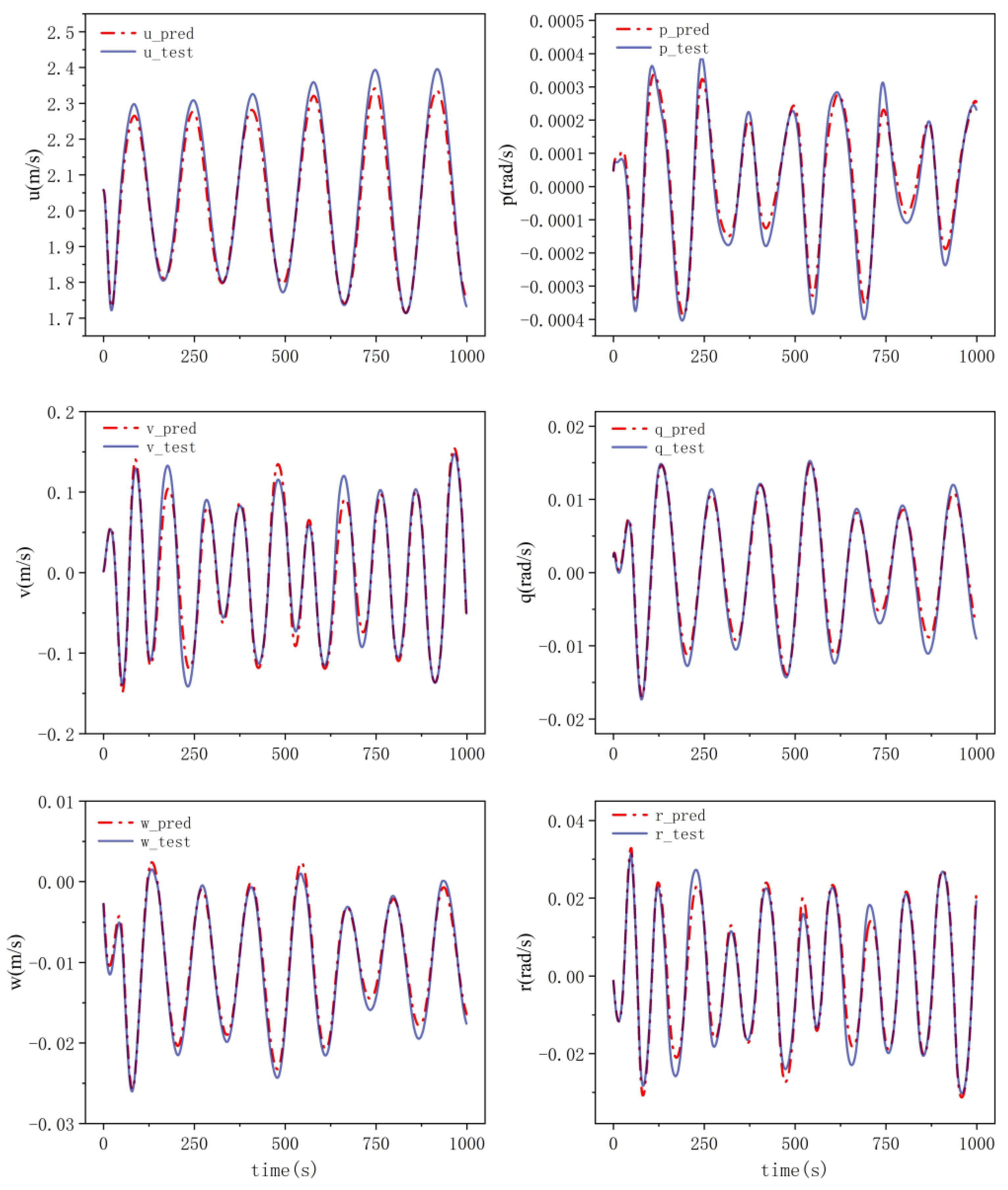
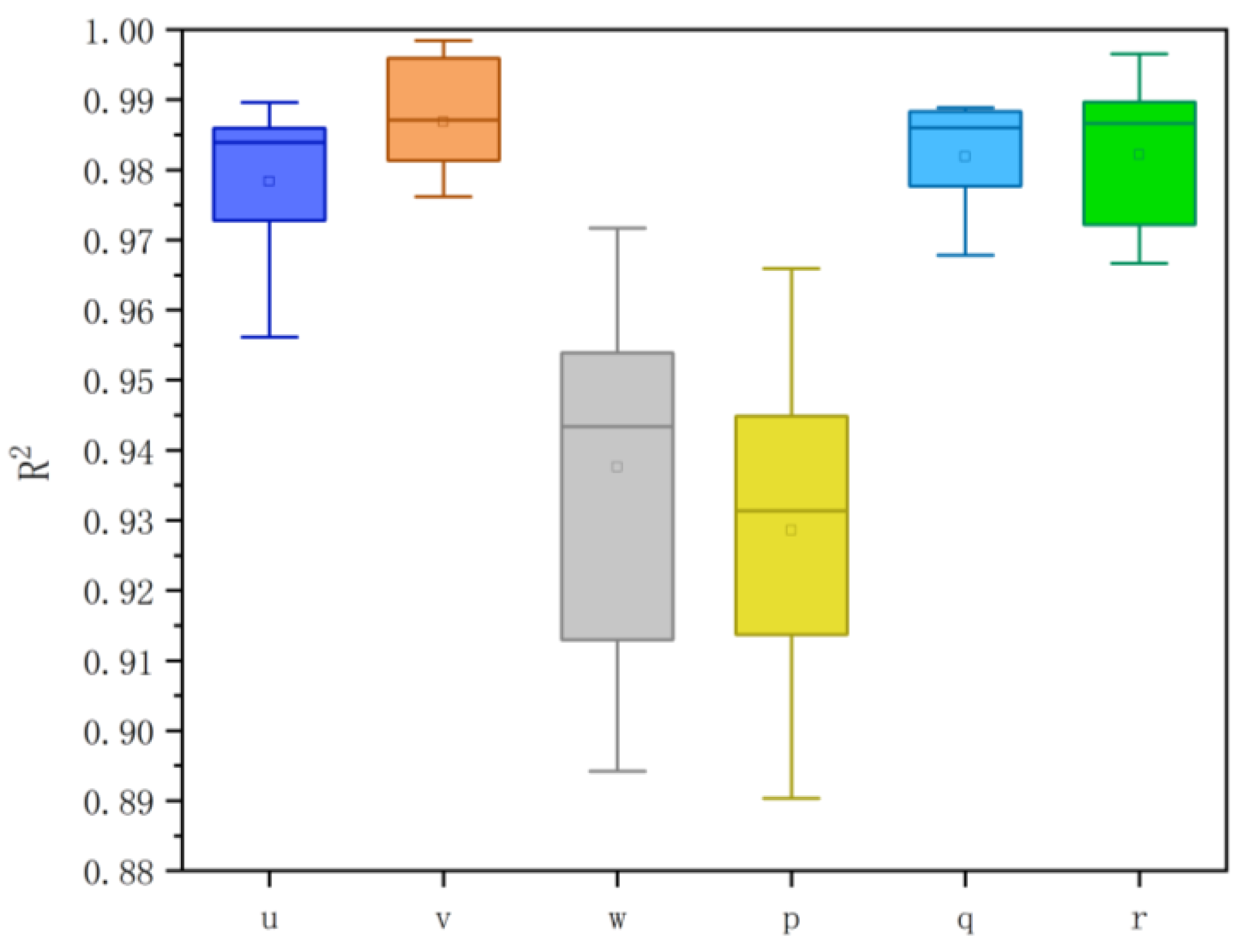
3.3. Predictive Performance
3.4. Ablation Studies
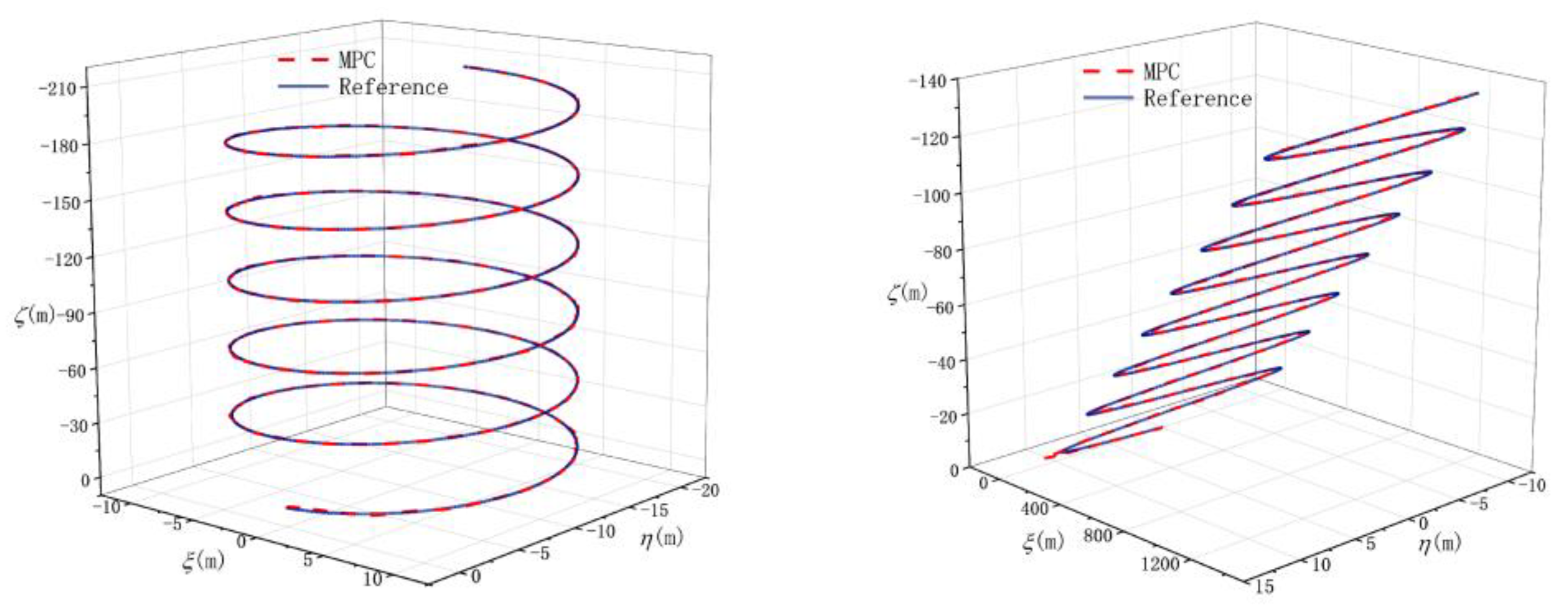
3.5. Closed-Loop Trajectory-Tracking Performance
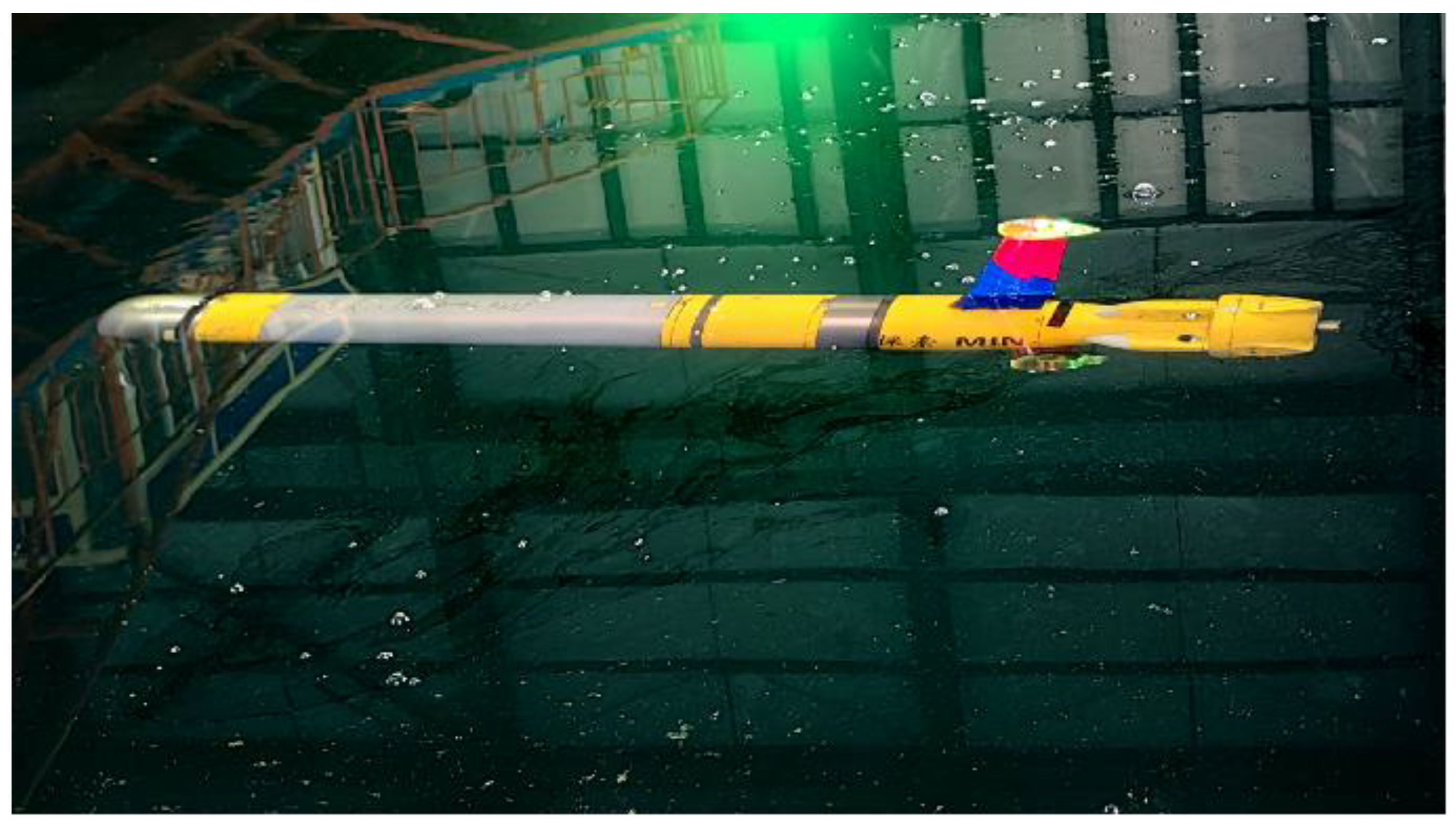
4. Field Test
4.1. Experimental Setup
4.2. Predictive Performance
4.3. Attitude Control Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, J.; Si, Y.; Chen, Y. A Review of Subsea AUV Technology. J. Mar. Sci. Eng. 2023, 11, 1119. [Google Scholar] [CrossRef]
- Sathish, K.; Venkata, R.C.; Anbazhagan, R.; Pau, G. Review of Localization and Clustering in USV and AUV for Underwater Wireless Sensor Networks. Telecom 2023, 4, 43–64. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- de Barros, E.A.; Pascoal, A.; de Sa, E. Investigation of a method for predicting AUV derivatives. Ocean Eng. 2008, 35, 1627–1636. [Google Scholar] [CrossRef]
- Fossen, T.I. Models for Ships, Offshore Structures and Underwater Vehicles. In Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2011; pp. 133–186. [Google Scholar]
- Rehman, F.U.; Huang, L.; Anderlini, E.; Thomas, G. Hydrodynamic Modelling for a Transportation System of Two Unmanned Underwater Vehicles: Semi-Empirical, Numerical and Experimental Analyses. J. Mar. Sci. Eng. 2021, 9, 500. [Google Scholar] [CrossRef]
- Javanmard, E.; Mansoorzadeh, S. A Computational Fluid Dynamics Investigation on the Drag Coefficient Measurement of an AUV in a Towing Tank. J. Appl. Fluid Mech. 2019, 12, 947–959. [Google Scholar] [CrossRef]
- Julca Avila, J.; Nishimoto, K.; Mueller Sampaio, C.; Adamowski, J.C. Experimental Investigation of the Hydrodynamic Coefficients of a Remotely Operated Vehicle Using a Planar Motion Mechanism. J. Offshore Mech. Arct. Eng. 2011, 134, 021601. [Google Scholar] [CrossRef]
- Racine, B.; Paterson, E. CFD-Based Method for Simulation of Marine-Vehicle Maneuvering. In Proceedings of the 35th AIAA Fluid Dynamics Conference and Exhibit, Toronto, ON, Canada, 6–9 June 2005; Fluid Dynamics and Co-located Conferences. American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2005. [Google Scholar]
- Muñoz, F.; Cervantes-Rojas, J.S.; Valdovinos, J.M.; Sandre-Hernández, O.; Salazar, S.; Romero, H. Dynamic Neural Network-Based Adaptive Tracking Control for an Autonomous Underwater Vehicle Subject to Modeling and Parametric Uncertainties. Appl. Sci. 2021, 11, 2797. [Google Scholar] [CrossRef]
- Song, S.; Liu, J.; Guo, J.; Wang, J.; Xie, Y.; Cui, J.H. Neural-Network-Based AUV Navigation for Fast-Changing Environments. IEEE Internet Things J. 2020, 7, 9773–9783. [Google Scholar] [CrossRef]
- Ertogan, M.; Wilson, P.A. Modelling Using Neural Networks and Dynamic Position Control for Unmanned Underwater Vehicles. J. ETA Marit. Sci. 2024, 12, 64–73. [Google Scholar] [CrossRef]
- Zhang, Y.; Che, J.; Hu, Y.; Cui, J.; Cui, J. Real-Time Ocean Current Compensation for AUV Trajectory Tracking Control Using a Meta-Learning and Self-Adaptation Hybrid Approach. Sensors 2023, 23, 6417. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.-F.; Han, C.-B.; Cheng, H.-X.; Cheng, C.; Ge, T. A Physics-Informed Neural Network for the Prediction of Unmanned Surface Vehicle Dynamics. J. Mar. Sci. Eng. 2022, 10, 148. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, Y.; Jing, J.; Fu, X.; Wang, B.; Ren, H.; Zhang, M.; Sun, T. Investigation of Physics-Informed Neural Networks to Reconstruct a Flow Field with High Resolution. J. Mar. Sci. Eng. 2023, 11, 2045. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Williams, G.; Aldrich, A.; Theodorou, E.A. Model Predictive Path Integral Control: From Theory to Parallel Computation. J. Guid. Control. Dyn. 2017, 40, 344–357. [Google Scholar] [CrossRef]
- Williams, G.; Drews, P.; Goldfain, B.; Rehg, J.M.; Theodorou, E.A. Aggressive driving with model predictive path integral control. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1433–1440. [Google Scholar]
- Gertler, M.; Hagen, G.R. Standard Equations of Motion for Submarine Simulation; Naval Ship Research and Development Center: Bethesda, MD, USA, 1967. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vector | x-Axis | y-Axis | z-Axis |
|---|---|---|---|
| Velocity | u | v | w |
| Rotation rate | p | q | r |
| Force | X | Y | Z |
| Moment | K | M | N |
| Euler angle | |||
| Position |
| Surge | |||
| Sway | |||
| Heave | |||
| Roll | |||
| Pitch | |||
| Yaw |
| Multi-Step Iterative Training | PINN-Loss | MSE | |
|---|---|---|---|
| ✓ | ✓ | 0.0007 | 0.9152 |
| ✓ | ✗ | 0.0067 | −4.9098 |
| ✗ | ✓ | 0.0035 | 0.6153 |
| ✗ | ✗ | 0.0141 | −78.4603 |
| Unit | Minimum | Maximum | Maximum Rate of Change | |
|---|---|---|---|---|
| Elevator | deg | −40 | 40 | 10 |
| Rudder | deg | −40 | 40 | 10 |
| Heading angle | deg | −40 | −40 | 5 |
| Pitch angle | deg | −40 | 10 | 5 |
| Depth | m | 0 | 12 | 0.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Hu, Z.; Du, W.; Geng, L.; Yang, Y. Research on Modeling Method of Autonomous Underwater Vehicle Based on a Physics-Informed Neural Network. J. Mar. Sci. Eng. 2024, 12, 801. https://doi.org/10.3390/jmse12050801
Zhao Y, Hu Z, Du W, Geng L, Yang Y. Research on Modeling Method of Autonomous Underwater Vehicle Based on a Physics-Informed Neural Network. Journal of Marine Science and Engineering. 2024; 12(5):801. https://doi.org/10.3390/jmse12050801
Chicago/Turabian StyleZhao, Yifeng, Zhiqiang Hu, Weifeng Du, Lingbo Geng, and Yi Yang. 2024. "Research on Modeling Method of Autonomous Underwater Vehicle Based on a Physics-Informed Neural Network" Journal of Marine Science and Engineering 12, no. 5: 801. https://doi.org/10.3390/jmse12050801
APA StyleZhao, Y., Hu, Z., Du, W., Geng, L., & Yang, Y. (2024). Research on Modeling Method of Autonomous Underwater Vehicle Based on a Physics-Informed Neural Network. Journal of Marine Science and Engineering, 12(5), 801. https://doi.org/10.3390/jmse12050801