
Hydrodynamic Behavior of a Submerged Spheroid in Close Proximity to the Sea Surface




Abstract
:1. Introduction
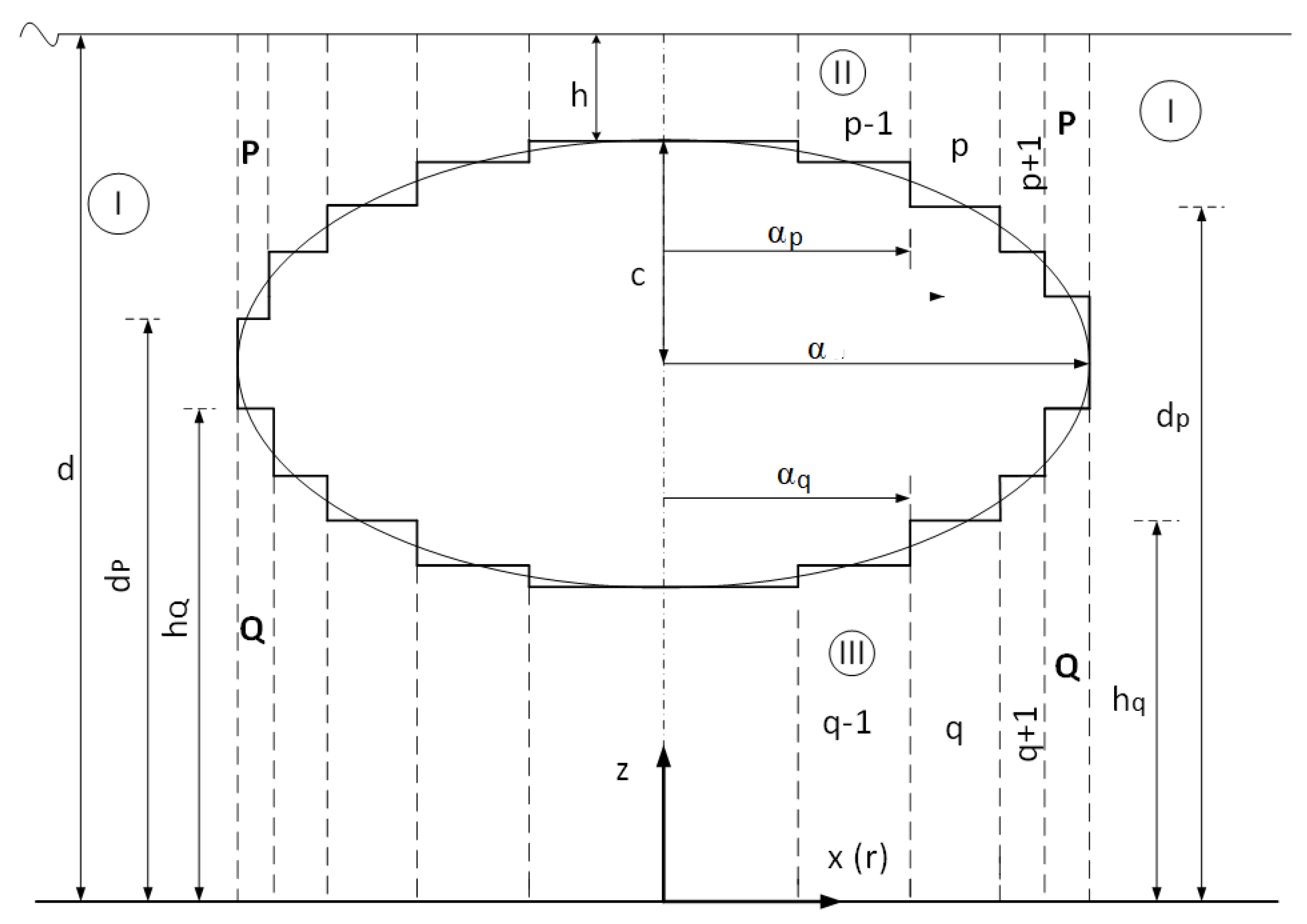
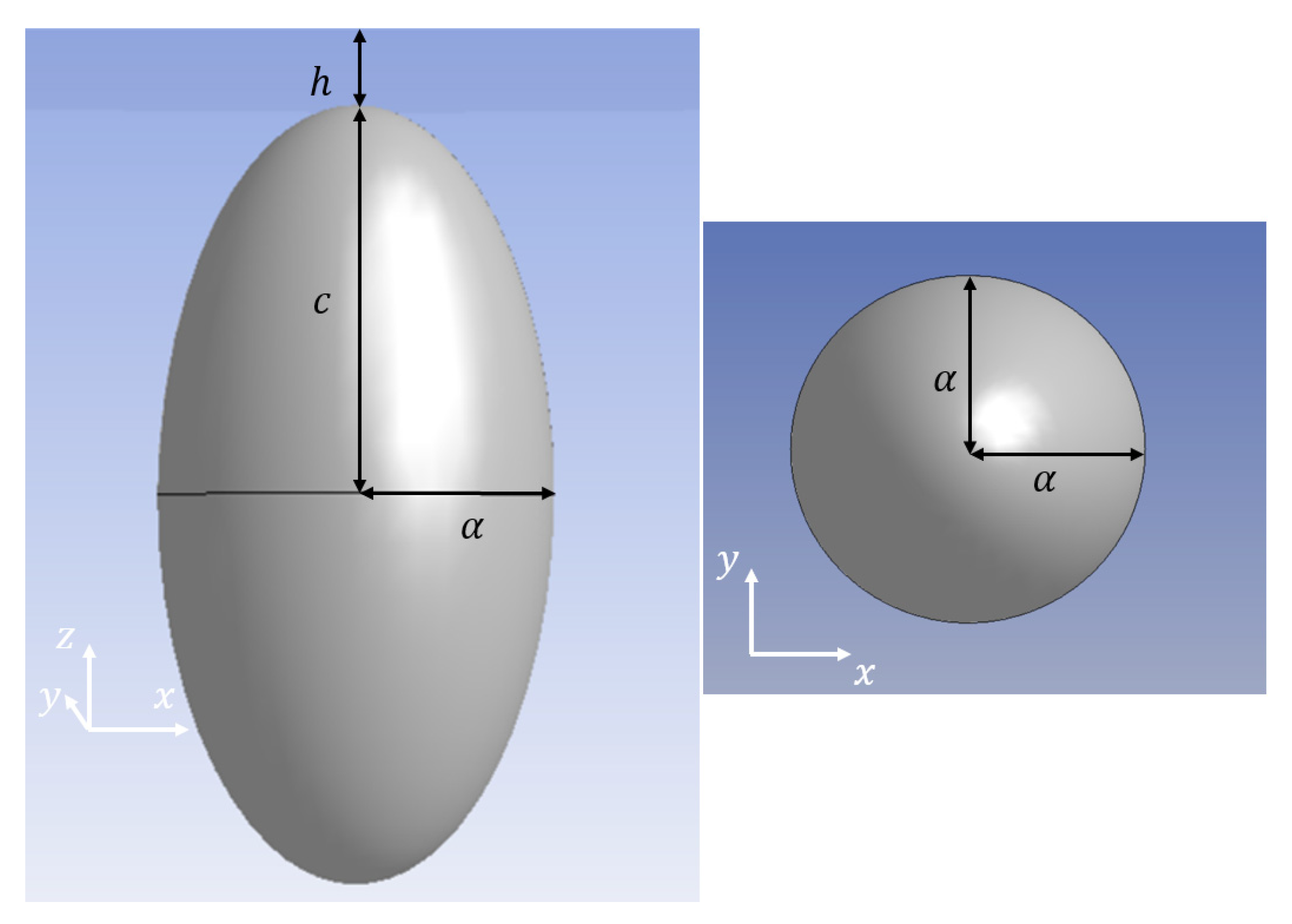
2. Formulation of the Problem
2.1. Velocity Potential
2.2. Hydrodynamic Forces
3. Numerical Results
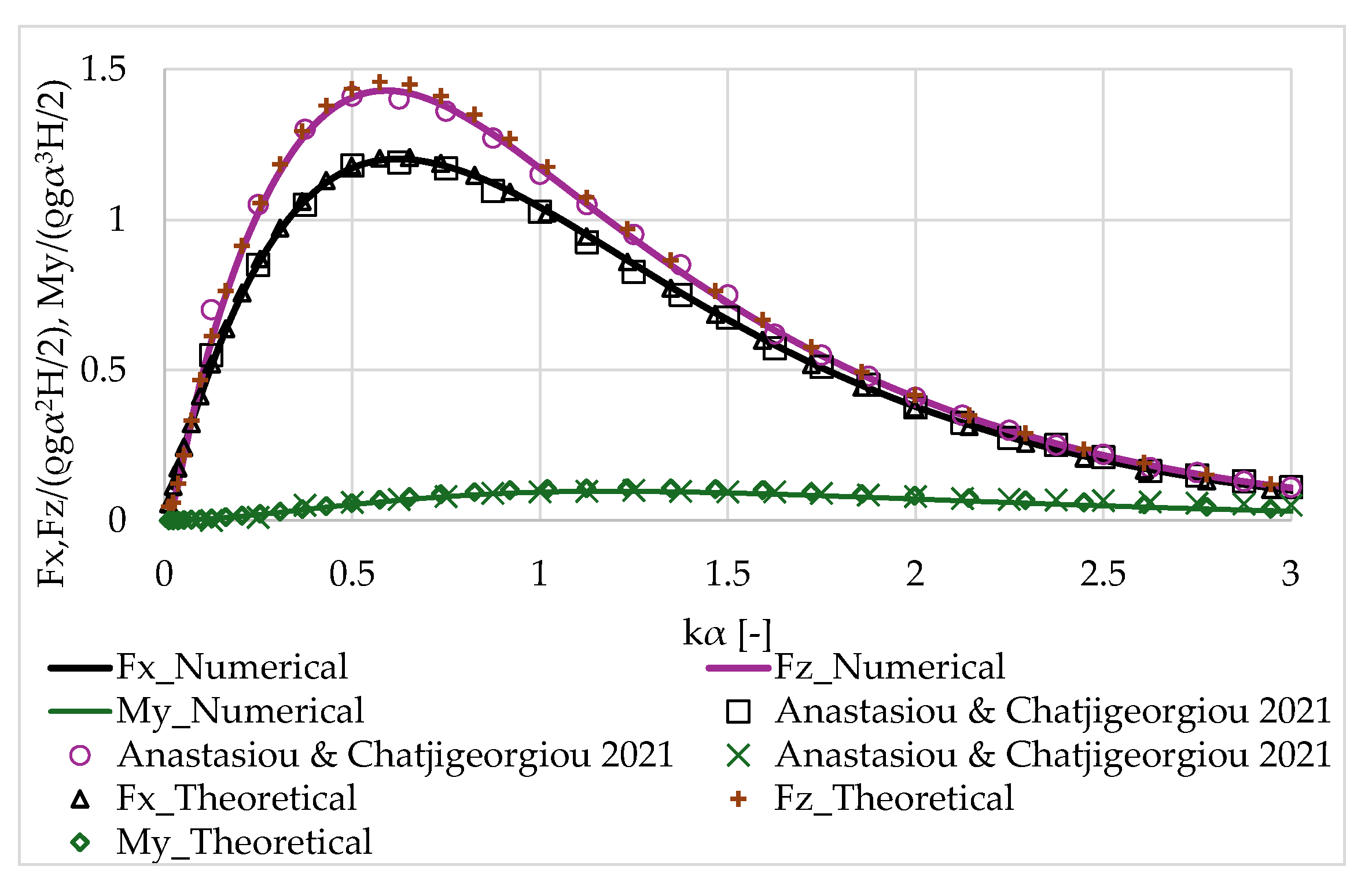
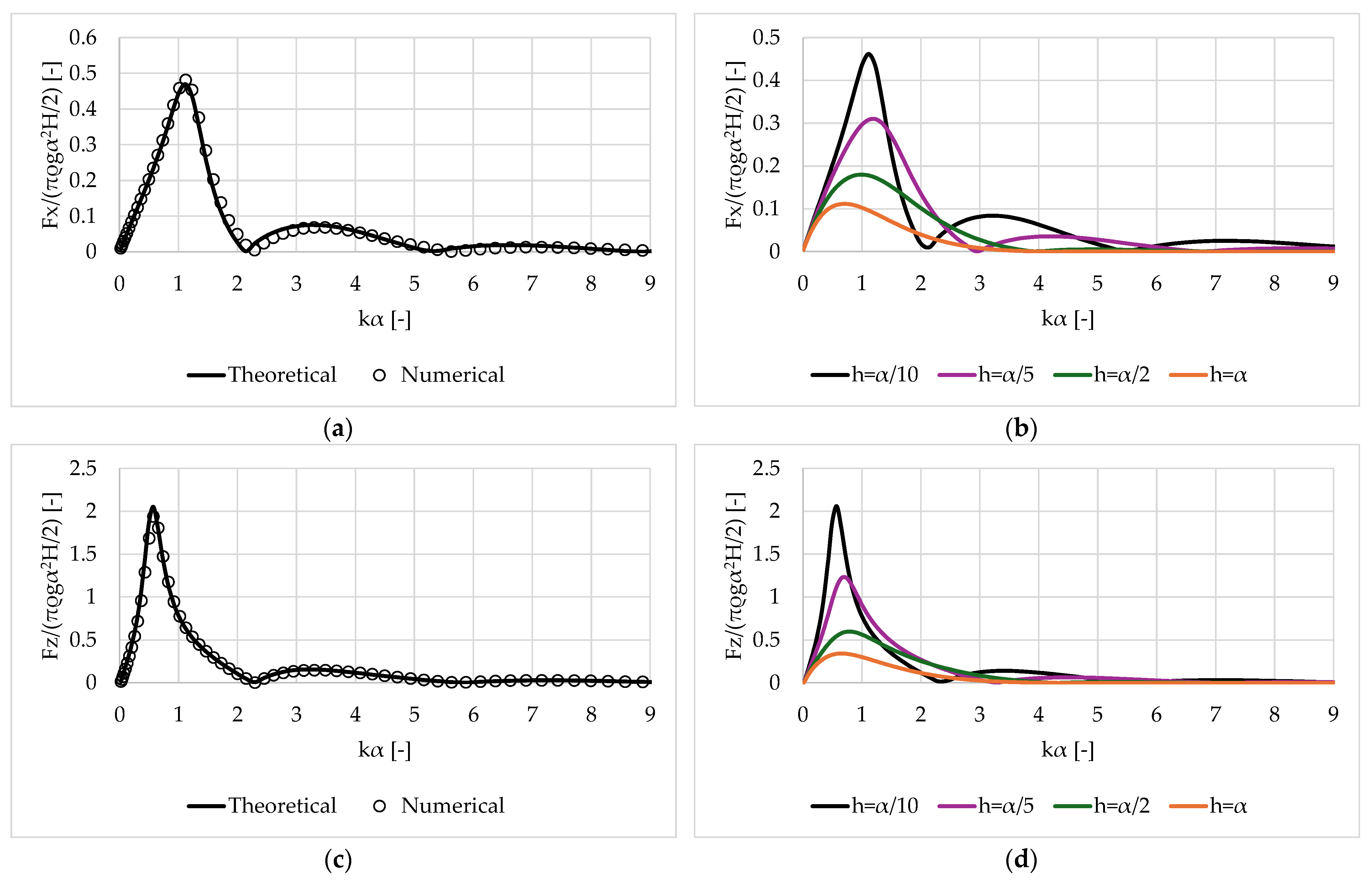
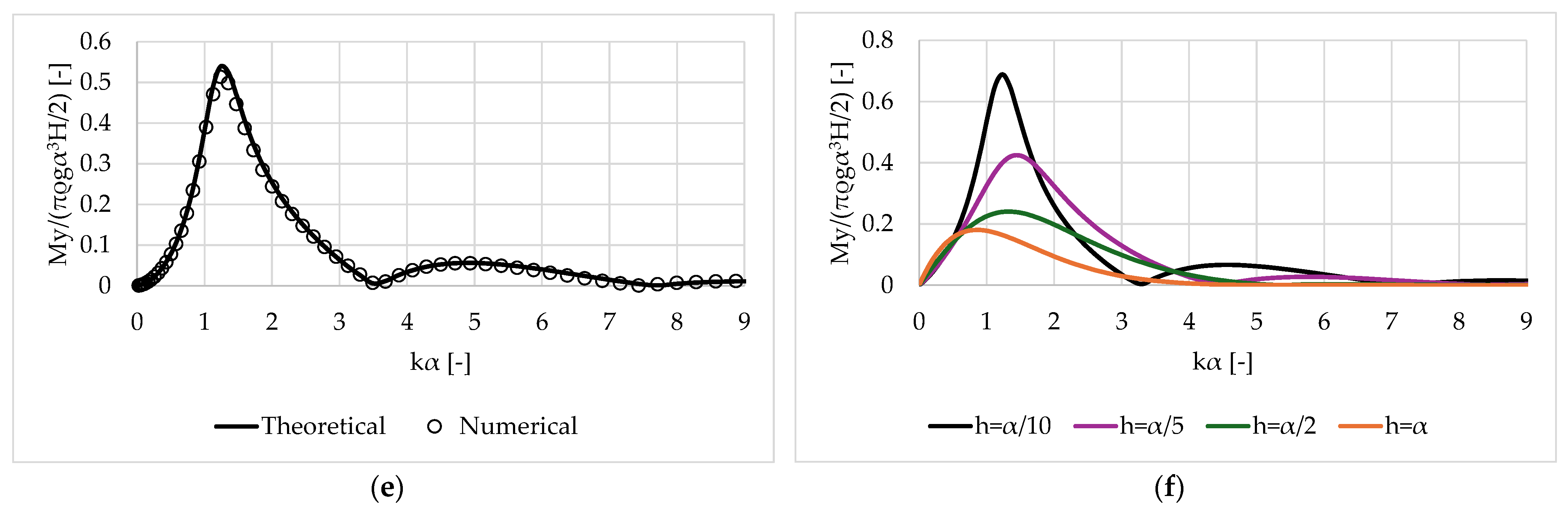
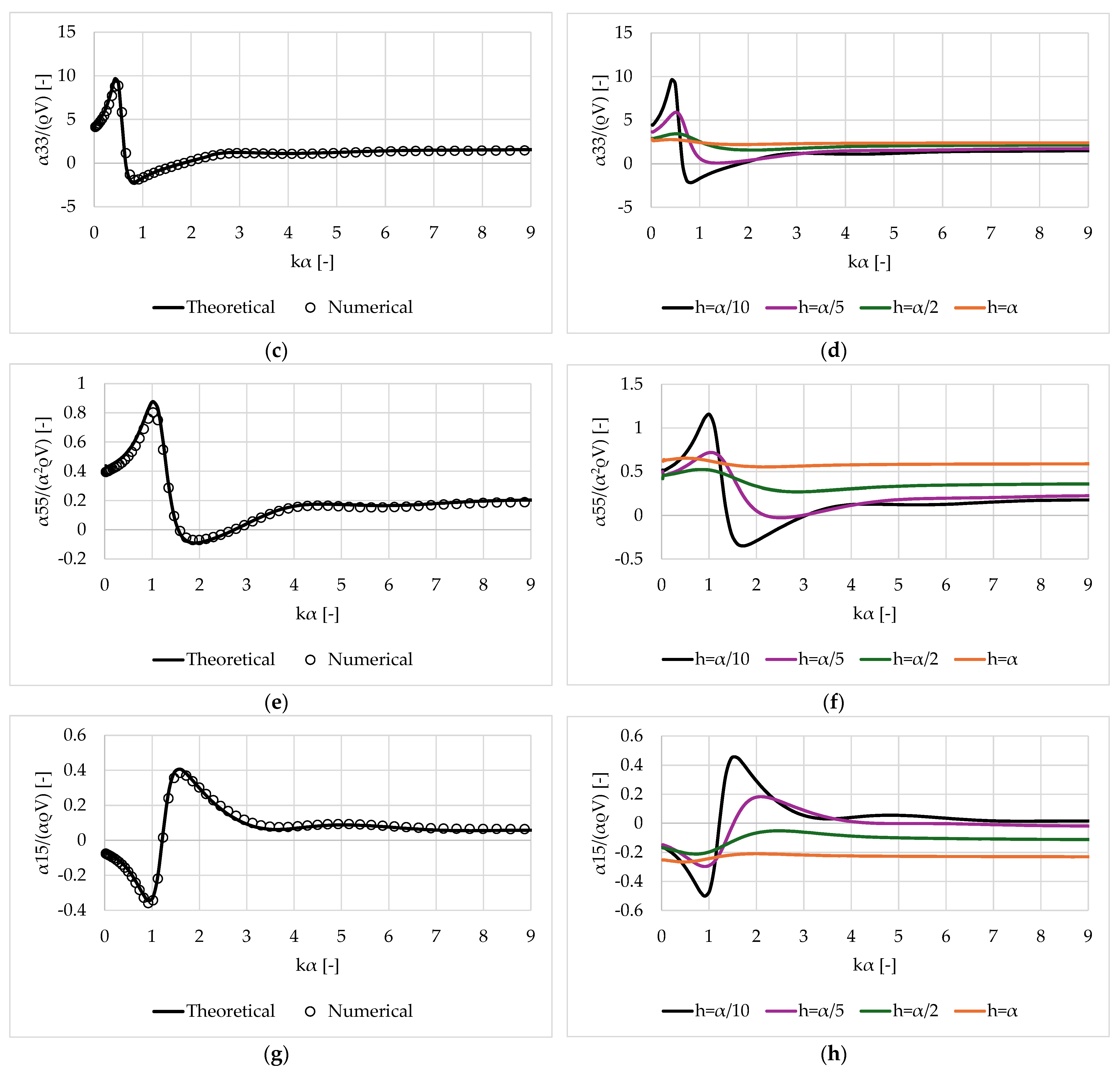
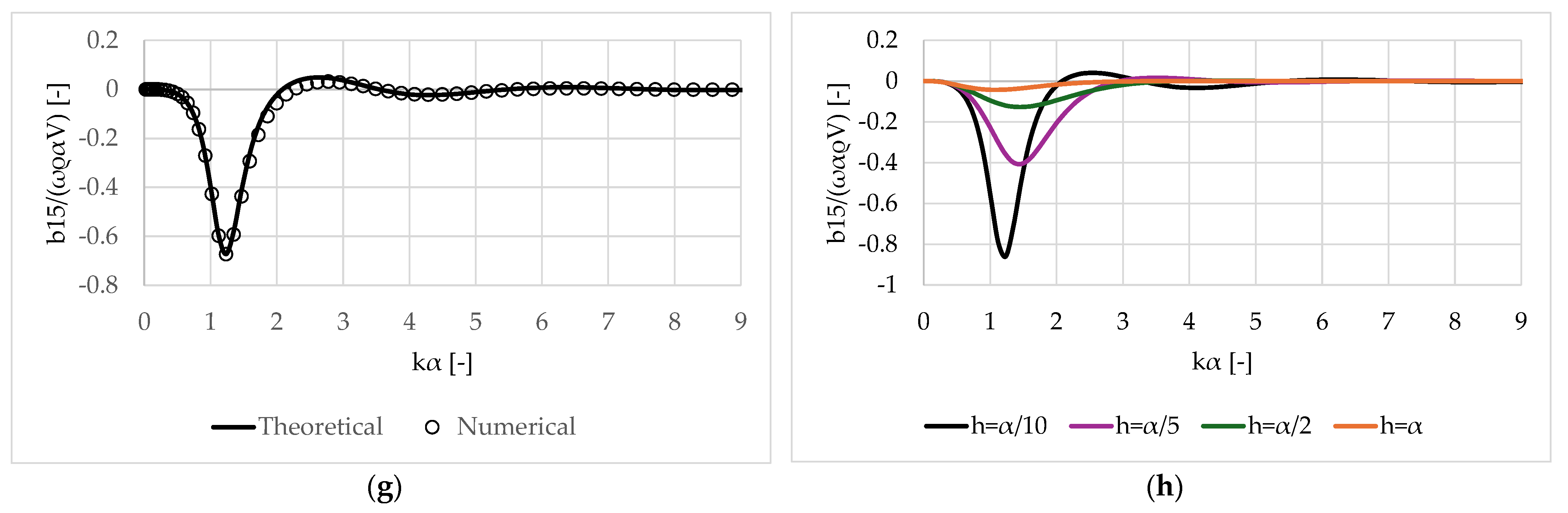
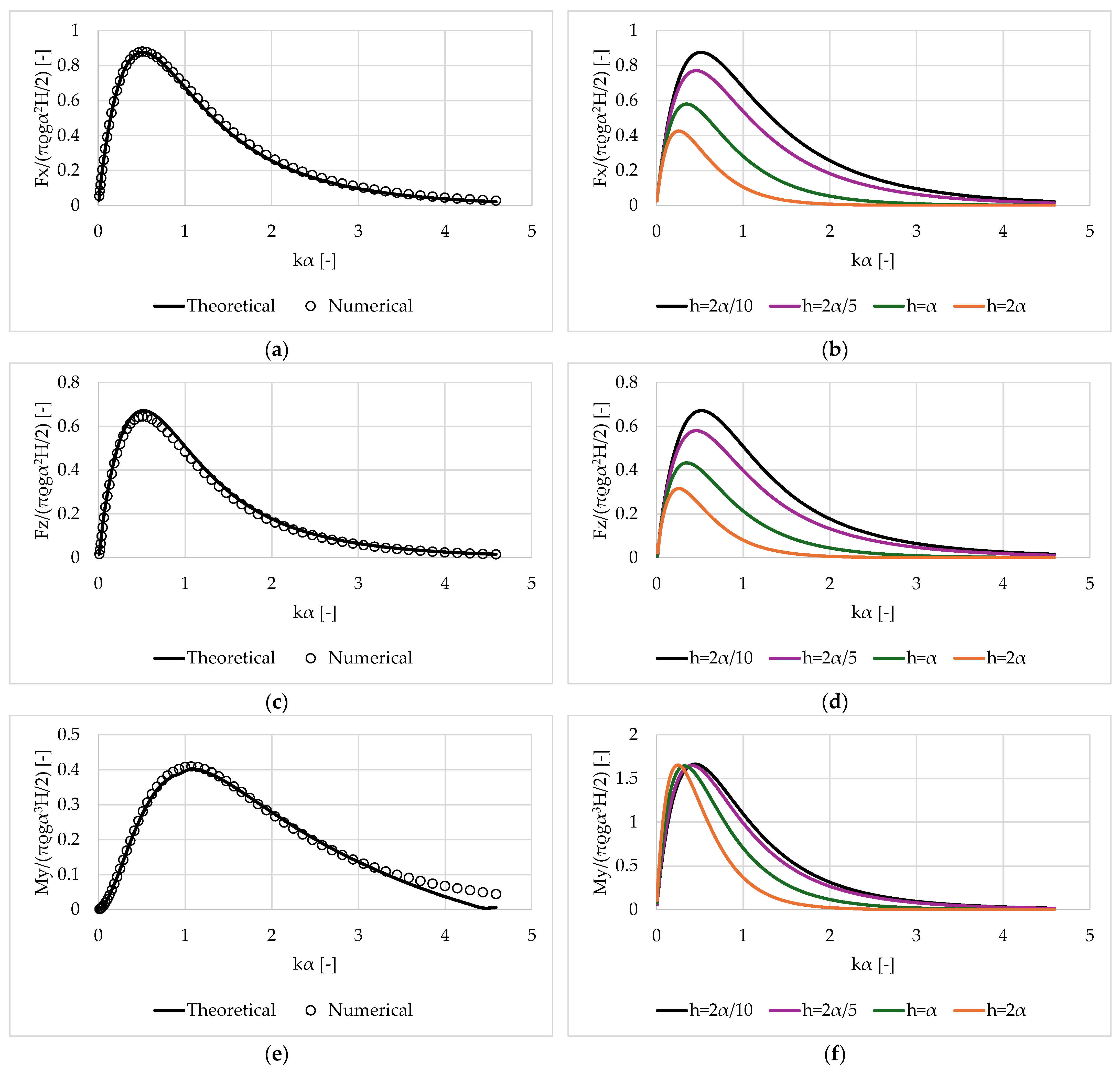
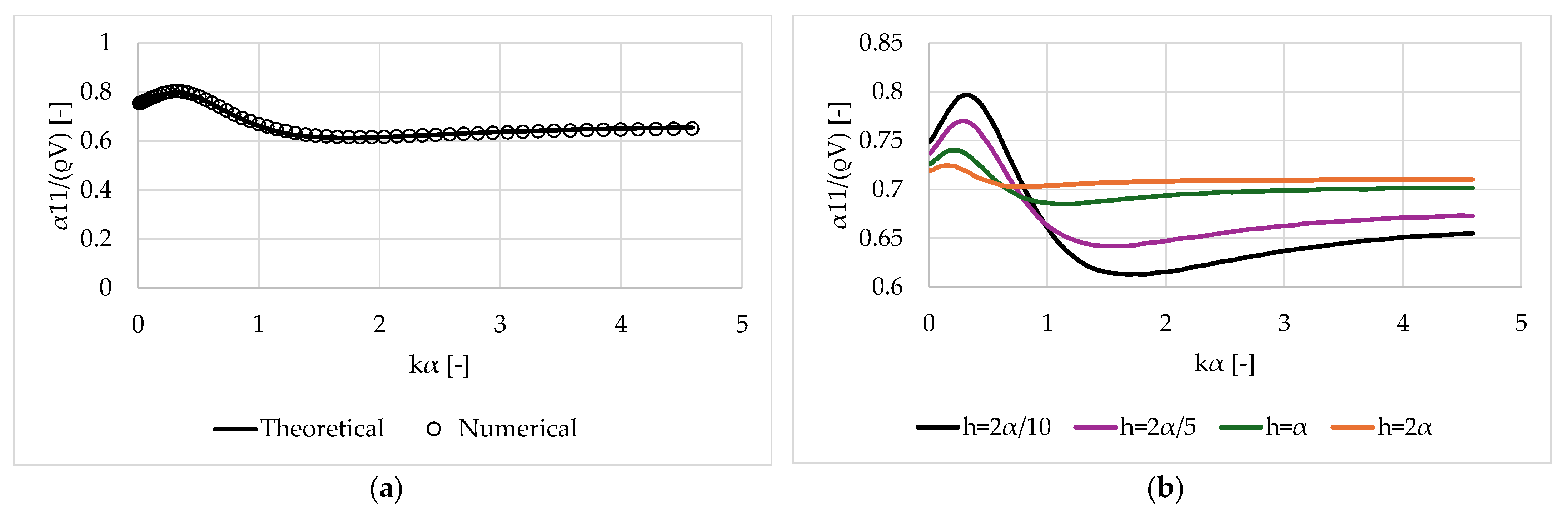
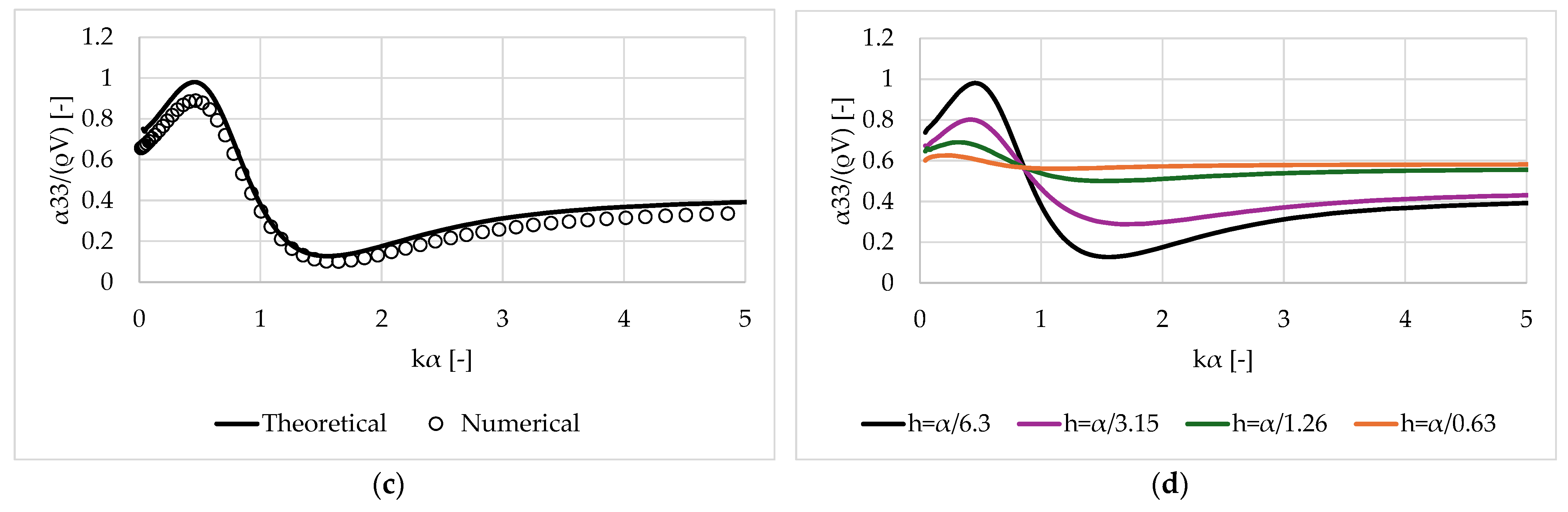
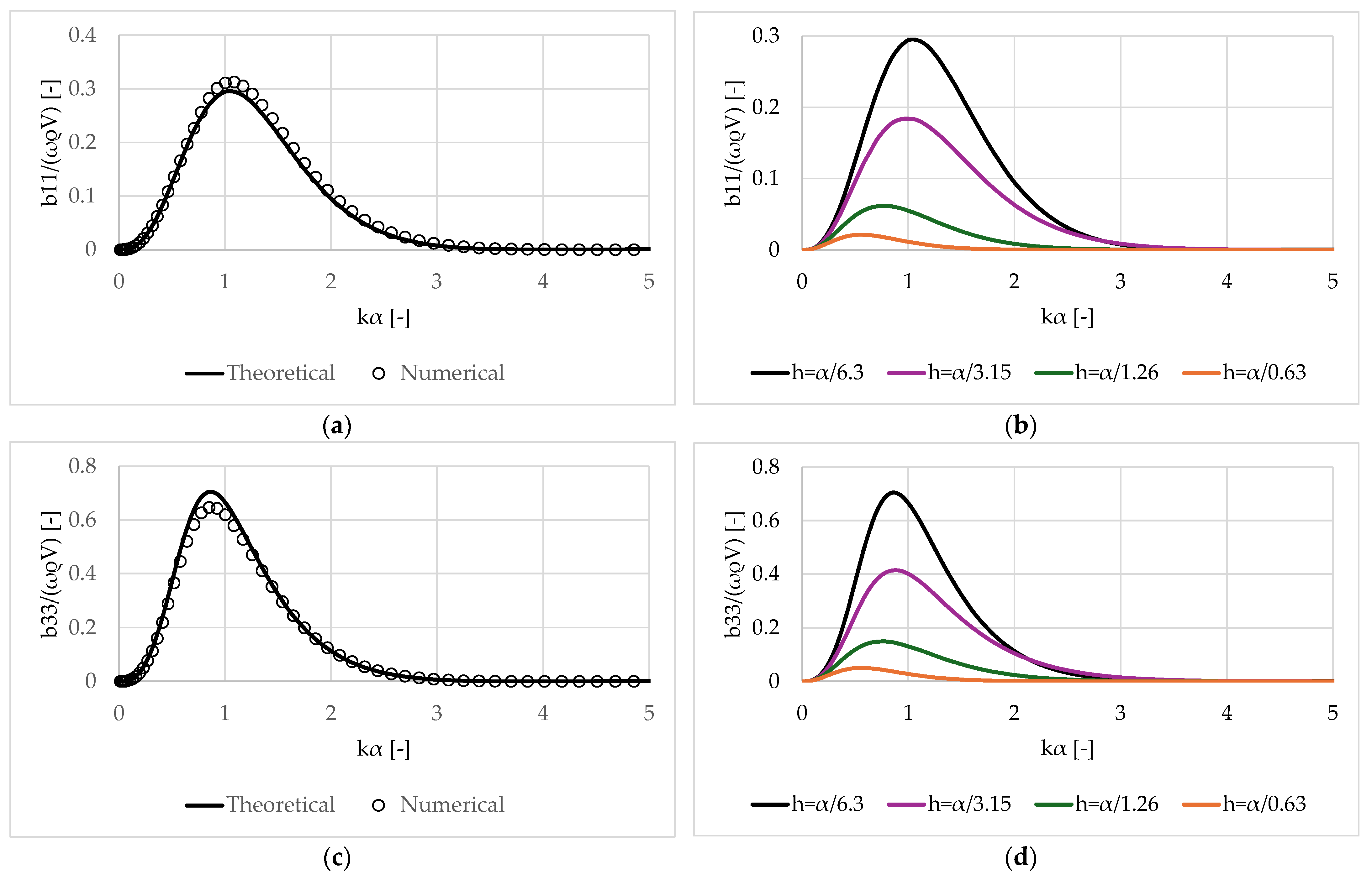
3.1. Validation of the Results
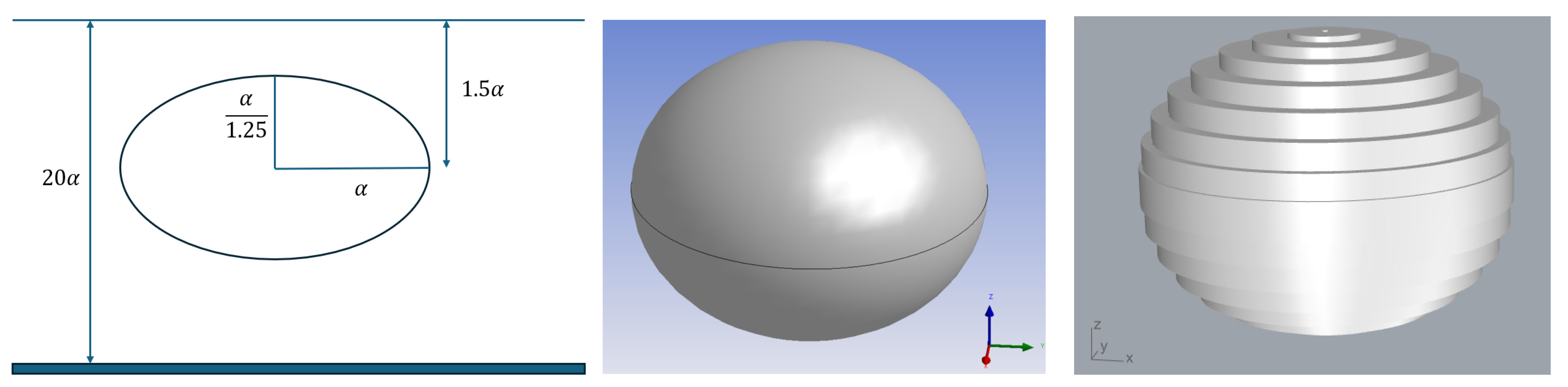
3.2. Oblate Spheroid
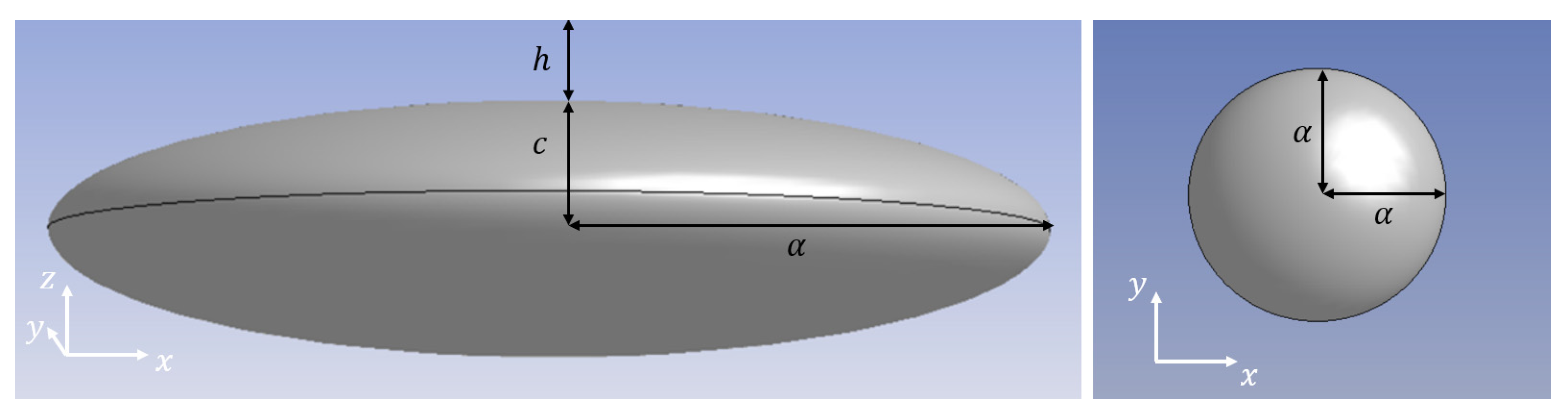
3.3. Prolate Spheroid
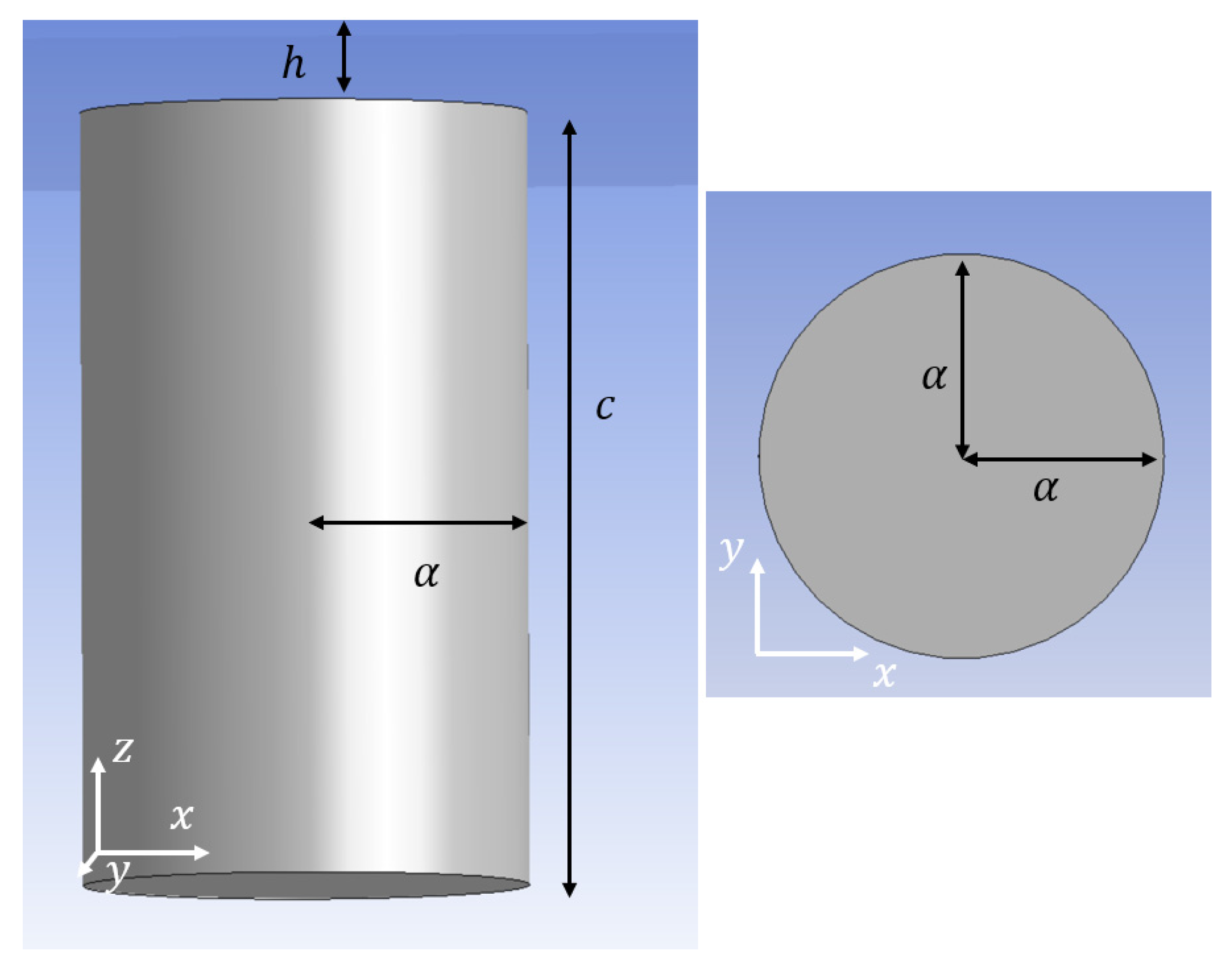
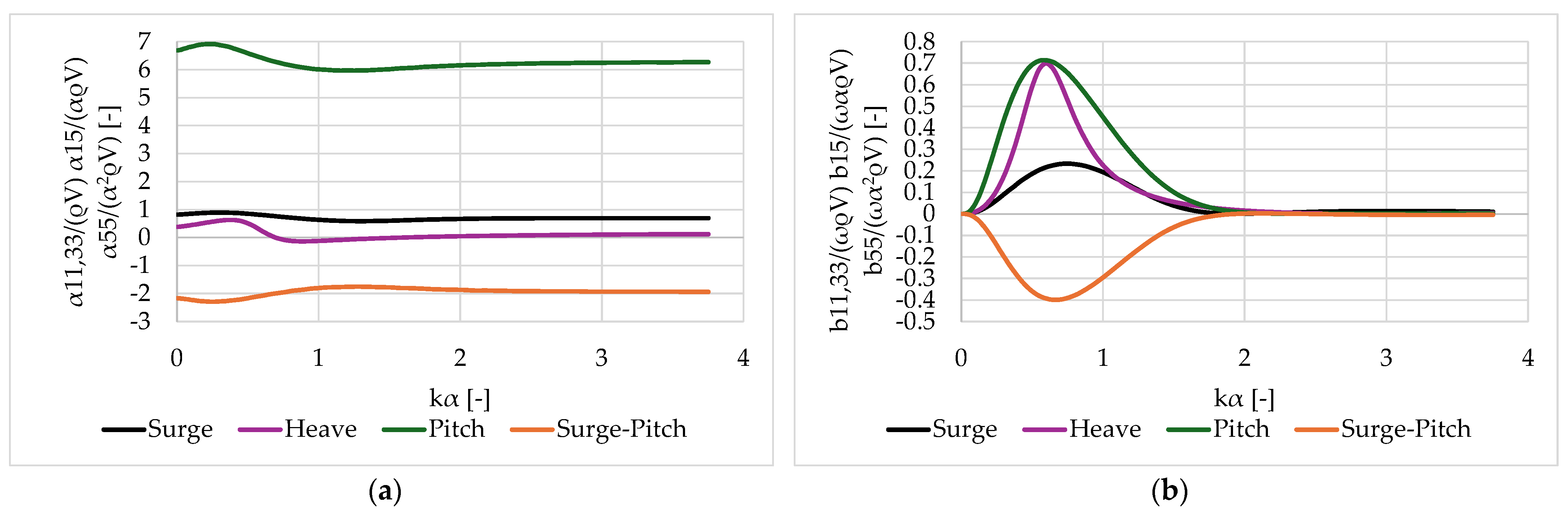
3.4. Vertical Cylinder
3.5. Sphere
4. Conclusions
- The hydrodynamics of submerged bodies undergo significant alteration depending on their depth below the free water surface. Notably, when the distance between the body and the free water surface is minimal, pronounced peaks in the body’s hydrodynamics are observed.
- Negative added mass coefficients manifest at specific wave frequencies and for shallow submergence depths. However, this trend diminishes as the distance between the body and the free surface increases. Nonetheless, damping coefficients consistently exhibit positive values across the examined frequency range, regardless of the submergence depth.
- Oblate spheroids exhibit negative added mass coefficients in the surge, heave and pitch directions at the lowest examined submergence depth, while prolate spheroids demonstrate positive added mass coefficients in these directions. Similarly, the examined sphere exhibits positive added mass coefficients in the surge and heave directions. Conversely, cylinders only exhibit negative added mass coefficients in the heave direction.
- With respect to the methodologies employed, the results derived from the developed theoretical formulation closely align with the variation pattern observed from the numerical method outcomes. However, deviations are evident at wave frequencies corresponding to peaks in the body’s hydrodynamics. Furthermore, it is pertinent to note that the present formulation is not applicable to ellipsoid-shaped bodies.
- The analysis findings indicate that in near-surface operations (i.e., for submergence depths less than the radius of the submerged body), wave motion primarily comprises a standing wave, resulting in rapid fluctuations in both added mass and damping coefficients. Hence, when designing submerged bodies, meticulous consideration of the geometric attributes in relation to the wave characteristics is imperative, as unexpected forces on the hull may arise, augmenting the body’s inertia and influencing its acceleration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radii | Distance from the Seabed | ||||
|---|---|---|---|---|---|
| 19.90α | 19.40α | ||||
| 19.83α | 19.42α | ||||
| 19.82α | 19.47α | ||||
| 19.73α | 19.56α | ||||
| Radii | Distance from the Seabed | ||||
|---|---|---|---|---|---|
| 39.80α | 35.80α | ||||
| 39.78α | 35.82α | ||||
| 39.70α | 35.89α | ||||
| 39.55α | 36.04α | ||||
| 39.34α | 36.25α | ||||
| 39.06α | 36.53α | ||||
| 38.75α | 36.85α | ||||
| 38.39α | 37.20α | ||||
| 38.06α | 37.54α | ||||
| Radii | Distance from the Seabed | ||||
|---|---|---|---|---|---|
| 31.58α | 29.58α | ||||
| 31.57α | 29.59α | ||||
| 31.54α | 29.63α | ||||
| 31.46α | 29.71α | ||||
| 31.35α | 29.81α | ||||
| 31.22α | 29.95α | ||||
| 31.06α | 30.11α | ||||
| 30.88α | 30.29α | ||||
| 30.72α | 30.45α | ||||
References
- Ogilvie, T.F. First- and second-order forces on a cylinder submerged under a free surface. J. Fluid Mech. 1963, 163, 451–472. [Google Scholar] [CrossRef]
- Chung, J.S. Forces on submerged cylinders oscillating near free surface. J. Hydronautics 1977, 11, 100–106. [Google Scholar] [CrossRef]
- Newman, J.N.; Sortland, B.; Vinje, T. Added mass and damping of rectangular bodies close to the free surface. J. Ship Res. 1984, 28, 219–225 . [Google Scholar] [CrossRef]
- McIver, P.; Evans, D.V. The occurrence of negative added mass in free-surface problems involving submerged oscillating bodies. J. Eng. Math. 1984, 18, 7–22. [Google Scholar] [CrossRef]
- Falnes, J.; McIver, P. Surface wave interactions with systems of oscillating bodies and pressure distributions. Appl. Ocean Res. 1985, 7, 225–234. [Google Scholar] [CrossRef]
- Greenhow, M.; Ahn, S.I. Added mass and damping of horizontal circular cylinder sections. Ocean Eng. 1988, 15, 495–504. [Google Scholar] [CrossRef]
- Newman, J.N. The motions of a floating slender torus. J. Fluid Mech. 1977, 83, 721–735. [Google Scholar] [CrossRef]
- McIver, P.; McIver, M. Trapped modes in an axisymmetric water-wave problem. Q. J. Mech. Appl. Math. 1977, 50, 165–178. [Google Scholar] [CrossRef]
- McIver, P.; McIver, M. Motion trapping structures in the three-dimensional water-wave problem. In Proceedings of the 21st International Workshop on Water Waves and Floating Bodies, Loughborough, UK, 2–5 April 2006. [Google Scholar]
- Newman, J.N. Radiation and diffraction analysis of the McIver toroid. J. Eng. Math. 1999, 35, 135–147. [Google Scholar] [CrossRef]
- McIver, P.; Newman, J.N. Trapping structures in the three-dimensional water-wave problem. J. Fluid Mech. 2003, 484, 283–301. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Hydrodynamic characteristics for groups of interacting axisymmetric bodies submerged near the sea surface of the sea bed. In Proceedings of the 3rd International Offshore and Polar Engineering Conference, Singapore, 6–11 June 1993. [Google Scholar]
- Shao, Z.; Chen, Y.; Fang, D.; Feng, S. Fuzzy depth control of small cylinder object navigating near free-surface. Appl. Mech. Mater. 2012, 128, 886–889. [Google Scholar] [CrossRef]
- Teng, B.; Li, Z.; Cong, L.; Sheng, J. Generalized hydrodynamic coefficients of twin connected circular cylinders in finite water depth. Ocean Eng. 2023, 289, 116263. [Google Scholar] [CrossRef]
- Michell, J.H. The wave-resistance of a ship. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1898, 45, 106–123. [Google Scholar] [CrossRef]
- Havelock, T.H. Some cases of wave motion due to a submerged obstacle. In Proceedings of the Royal Society A 93, 1 September 1917; pp. 520–532. [Google Scholar] [CrossRef]
- Havelock, T.H. The wave resistance of a spheroid. In Proceedings of the Royal Society A 131, 1 May 1931; pp. 275–285. [Google Scholar] [CrossRef]
- Chepelianskii, A.; Schindler, M.; Chevy, F.; Raphael, E. Self-consistent theory of capillary–gravity-wave generation by small moving objects. Phys. Rev. E 2010, 81, 016306. [Google Scholar] [CrossRef] [PubMed]
- Benusiglio, A.; Chevy, F.; Raphael, E.; Clanet, C. Wave drag on a submerged sphere. Phys. Fluids 2015, 27, 07210. [Google Scholar] [CrossRef]
- Sergiienko, N.; Cazzolato, B.S.; Ding, B.; Hardy, P.; Arjomandi, M. Performance comparison of the floating and fully submerged quasi-point absorber wave energy converters. Renew Energy 2017, 108, 425–437. [Google Scholar] [CrossRef]
- Mc Cauley, G.J. Exploring Simplified Models for Wave Interaction with a Shallowly Submerged Structures with Application to Ocean Wave Energy. Ph.D. Thesis, University of Western Australia, Crawley, WA, Australia, 2021. [Google Scholar]
- Mc Cauley, G.J.; Wolgamot, H.; Orszaghova, J.; Draper, S. Linear hydrodynamic modelling of arrays of submerged oscillating cylinders. Appl. Ocean Res. 2018, 81, 1–14. [Google Scholar] [CrossRef]
- Arentzen, E.S.; Mandel, P. Naval architectural aspects of submarine design. Soc. Nav. Archit. Mar. Eng. 1960, 68, 622–692. [Google Scholar]
- Burcher, R.; Rydill, L.J. Concepts in Submarine Design; Ocean Technology Series 2; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar] [CrossRef]
- Jagadeesh, P.; Murali, K.; Idichandy, V.G. Experimental investigation of hydrodynamic force coefficients over AUV hull form. Ocean Eng. 2009, 36, 113–118. [Google Scholar] [CrossRef]
- Mansoorzadeh, S.; Javanmard, E. An investigation of free surface effects on drag and lift coefficients of an autonomous underwater vehicle (AUV) using computational and experimental fluid dynamics methods. J. Fluids Struct. 2014, 51, 161–171. [Google Scholar] [CrossRef]
- Nematollahi, A.; Dadvand, A.; Dawoodian, M. An axisymmetric underwater vehicle-free surface interaction: A numerical study. Ocean Eng. 2015, 96, 205–214. [Google Scholar] [CrossRef]
- Conway, A.S.T.; Valentinis, F.; Seil, G. Characterization of suction effects on a submarine body operating near the free surface. In Proceedings of the 21st Australian Fluid Mechanics Conference, Adelaide, Australia, 10–13 November 2018. [Google Scholar]
- Amiri, M.M.; Esperana, P.; Vitola, M.A.; Sphaier, S.H. How does the free surface affect the hydrodynamics of a shallowly submerged submarine? Appl. Ocean Res. 2018, 76, 34–50. [Google Scholar] [CrossRef]
- Amiri, M.M.; Esperana, P.; Vitola, M.A.; Sphaier, S.H. An initial evaluation of the free surface effect on the maneuverability of underwater vehicles. Ocean Eng. 2019, 196, 106851. [Google Scholar] [CrossRef]
- Amiri, M.M.; Esperana, P.; Vitola, M.A.; Sphaier, S.H. Investigation into the wave system of a generic submarine moving along a straight path beneath the free surface. Eur. J. Mech. –B/Fluids 2019, 76, 98–114. [Google Scholar] [CrossRef]
- Amiri, M.M.; Esperana, P.; Vitola, M.A.; Sphaier, S.H. Viscosity effect on an underwater vehicle-free surface hydrodynamic interaction. Appl. Ocean Res. 2020, 104, 102365. [Google Scholar] [CrossRef]
- Lambert, W.; Brizzolara, S. On the effect of non-linear boundary conditions on the wave disturbance and hydrodynamic forces of underwater vehicles travelling near the free-surface. In Proceedings of the 39th International Conference on Ocean, Offshore and Arctic Engineering, The American Society of Mechanical Engineers, Fort Lauderdale, FL, USA, 3–7 August 2020. [Google Scholar]
- Sudharsun, G.; Ali, A.; Mitra, A.; Jaiswal, A.; Naresh, P.; Warrior, H.V. Free surface features of submarines moving underwater: Study of Bernoulli Hump. Ocean Eng. 2022, 249, 110792. [Google Scholar] [CrossRef]
- Ling, X.; Leong, Z.Q.; Duffy, J. Effects of pitch angle on a near free surface underwater vehicle. Ocean Eng. 2023, 286, 115611. [Google Scholar] [CrossRef]
- Hao, Y.; Shen, D.; Xiong, Z. Design of submarine near-surface depth controller. In Proceedings of the 5th World Congress on Intelligent Control and Automation, Hangzhou, China, 15–19 June 2004. [Google Scholar] [CrossRef]
- Choi, J.H.; Yeo, D.J.; Rhee, K.P.; Park, J.Y. On the vertical plane dynamics modeling and depth control of a submerged body moving beneath free surface. J. Soc. Nav. Archit. Korea 2006, 43, 647–655. [Google Scholar] [CrossRef]
- Choi, J.H.; Rhee, K.P.; Ann, S.P.; Lee, S.K. Mathematical model of wave forces and moments for the depth control of a submerged body. In Proceedings of the Annual Spring Meeting of the Society of Naval Architects of Korea, Jeju, Korea, 29–30 May 2008; pp. 1228–1235. [Google Scholar]
- Ananthakrishman, P. AUV Hydrodynamics in Shallow Water During Adverse Weather Conditions; Defense Technical Information Center, US Government, USA, 1999.
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Park, J.Y.; Kim, N.; Yoon, H.K.; Cho, H. Adaptive depth controller design for a submerged body moving near free surface. Appl. Ocean Res. 2016, 58, 83–94. [Google Scholar] [CrossRef]
- Youn, T.G.; Kim, M.J.; Kim, M.C.; Kang, J.G. Effect of free surface based on submergence depth of underwater vehicle. J. Ocean Eng. Technol. 2022, 36, 83–90. [Google Scholar] [CrossRef]
- Zemlyak, V.; Pogorelova, A.; Kozin, V. Motion of a submerged body in a near-surface water environment. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100433. [Google Scholar] [CrossRef]
- Zemlyak, V.; Pogorelova, A.; Kozin, V. Motion of a submerged body under a free surface and an ice cover in finite water depth conditions. Ocean Eng. 2023, 288, 116161. [Google Scholar] [CrossRef]
- Kokkinowrachos, K.; Mavrakos, S.; Asorakos, S. Behavior of vertical bodies of revolution in waves. Ocean Eng. 1986, 13, 505–538. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Wave loads on a stationary floating bottomless cylinder with finite wall thickness. Appl. Ocean Res. 1985, 7, 213–224. [Google Scholar] [CrossRef]
- Mavrakos, S.A. Hydrodynamic coefficients in heave of two concentric surface-piercing truncated circular cylinders. Appl. Ocean Res. 2004, 26, 84–97. [Google Scholar] [CrossRef]
- Konispoliatis, D.N.; Chatjigeorgiou, I.K.; Mavrakos, S.A. Theoretical hydrodynamic analysis of a surface-piercing porous cylindrical body. Fluids 2021, 6, 320. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I. Handbook of Mathematical Functions; Dover Publications, Inc.: New York, NY, USA, 1970. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 1977. [Google Scholar]
- Anastasiou, E.I.; Chatjigeorgiou, I.K. Hydrodynamics of a submerged oblate spheroid in finite water depth using the method of ultimate image singularities. Appl. Ocean Res. 2021, 111, 102636. [Google Scholar] [CrossRef]
- ANSYS AQWA Theory Manual; ANSYS Inc.: Canonsburg, PA, USA, 2015.
- Mavrakos, S.A. Users manual for the software HAMVAB. School of Naval Architecture and Marine Engineering, Laboratory for Floating Structures and Mooring Systems, National Technical University edition. Athens, Greece, 1995. [Google Scholar]
- Mavrakos, S.A.; Zafeiris, S.; Papadakis, G.P.; Konispoliatis, D.N. Semi-analytical and CFD formulations of a spherical floater. In Proceedings of the 15th European Wave and Tidal Conference (EWTEC), Bilbao, Spain, 3–7 September 2023. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mavrakos, A.S.; Konispoliatis, D.N.; Mavrakos, S.A. Hydrodynamic Behavior of a Submerged Spheroid in Close Proximity to the Sea Surface. J. Mar. Sci. Eng. 2024, 12, 893. https://doi.org/10.3390/jmse12060893
Mavrakos AS, Konispoliatis DN, Mavrakos SA. Hydrodynamic Behavior of a Submerged Spheroid in Close Proximity to the Sea Surface. Journal of Marine Science and Engineering. 2024; 12(6):893. https://doi.org/10.3390/jmse12060893
Chicago/Turabian StyleMavrakos, Anargyros S., Dimitrios N. Konispoliatis, and Spyridon A. Mavrakos. 2024. "Hydrodynamic Behavior of a Submerged Spheroid in Close Proximity to the Sea Surface" Journal of Marine Science and Engineering 12, no. 6: 893. https://doi.org/10.3390/jmse12060893
APA StyleMavrakos, A. S., Konispoliatis, D. N., & Mavrakos, S. A. (2024). Hydrodynamic Behavior of a Submerged Spheroid in Close Proximity to the Sea Surface. Journal of Marine Science and Engineering, 12(6), 893. https://doi.org/10.3390/jmse12060893